Винтовая передача параллельной схемы - RU2619487C2
Код документа: RU2619487C2
Чертежи





Описание
Изобретение относится к механическим передачам и предназначено для передачи энергии от входного к выходному звену с преобразованием вращательного движения в поступательное и может найти применение в самых различных отраслях техники и промышленности.
Из патентной документации (US 2683379; US 2015/0233456 A1; SU 737687; RU 2392517; RU 2463500) и научно-технической литературы (Блинов Д.С. Планетарные роликовинтовые механизмы. Конструкции, методы расчетов. - М.: МГТУ им. Н.Э. Баумана, 2006. - 222 с.; Морозов В.В. Роликовинтовые механизмы. Кинематические характеристики. - Владимир: Изд-во ВлГУ, 2005. - 78 с.) известно значительное количество планетарных роликовинтовых механизмов. Основными элементами передачи являются: гайка, ролики, винт, сепараторы и зубчатые венцы. Передача сходна с планетарным редуктором Джемса (Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988. - 640 с.)* (заимствованы термины, используемые в данном описании): гайка и винт выполняют роль солнечных колес; ролики служат сателлитами, а сепараторы выполняют функцию водила. Для того чтобы аксоиды (начальные поверхности) роликов и гайки перекатывались без скольжения, предусмотрены синхронизаторы из зубчатых передач. Поступательное перемещение выходного звена происходит за счет разных углов наклона резьб винта и роликов.
Известна планетарная роликовинтовая передача по патенту RU 2451220, которая является наиболее близким аналогом предлагаемого изобретения, вследствие чего она принята за прототип. Передача содержит гайку, ролики, винт, два сепаратора и два зубчатых венца. Ролики совершают планетарные движения относительно гайки и винта. Аксоиды (начальные поверхности) роликов и гайки перекатываются без скольжения за счет равенства шагов и углов наклона резьб, сепараторов, а также синхронизирующих зубчатых передач, составленных из зубчатых венцов, запрессованных в гайку с двух сторон и зубьев, размещенных на концах роликов. Причем передаточное отношение зубчатых передач строго увязано с размерами аксоид (начальных поверхностей) роликов и гайки. Ролики, совершая планетарное движение относительно винта, одновременно получают поступательное движение вдоль оси винта за счет разных углов наклона резьб ролика и винта. При этом шаги сопряженных резьб равны. Рассматриваемая планетарная роликовинтовая передача условно имеет одну степень свободы, а фактически обладает двумя степенями свободы.
Упомянутая планетарная роликовинтовая передача обладает многими достоинствами, в частности, высоким КПД, а также большим диапазоном передаточных отношений. Наряду с положительными качествами рассмотренные передачи обладают и недостатками:
- увеличение нагрузочной способности передачи связано с увеличением диаметра винта, высоты гайки и роликов;
- трудоемкость изготовления высоких гаек;
- увеличение чувствительности передачи к различного рода погрешностям с увеличением высоты гайки.
Поставлена задача - разработать планетарную роликовинтовую передачу, лишенную указанных выше недостатков, обладающую высоким КПД, а также повышенной нагрузочной способностью.
Поставленная задача решена следующим образом. Винтовая передача параллельной схемы содержит винт; несколько гаек с одинаковыми резьбами, каждая из которых содержит ролики, установленные с возможностью совершать планетарные движения относительно гайки и винта, причем в каждом случае сепараторы, в которые установлены ролики, и синхронизирующие зубчатые колеса, размещенные на гайке и роликах, а также равенство шагов и угла наклона резьб гайки и роликов, не позволяют последним перемещаться относительно гайки в осевом направлении, при этом винт и гайки с роликами установлены с возможностью в относительном вращательном движении получать поступательное движение вдоль своих осей в силу неравенства углов наклона резьб роликов и винта при равенстве шагов.
Отличительным признаком данного изобретения является то, что все гайки связаны между собой поводками группы Ассура и при этом на звенья группы Ассура действует суммарная нагрузка от всех гаек. Кроме того, ролики установлены с возможностью синхронизированного перемещения осей всех роликов для исключения возникновения дополнительных степеней свободы передачи.
В предложенном изобретении гайки с роликами, установленные на одном винте и связанные между собой поводками группы Ассура, несут вполне определенную нагрузку. Связано это с тем, что группа Ассура является статически определимой кинематической цепью и распределение усилий в кинематических парах и на звеньях происходит однозначно. Сказанное позволяет для передачи нагрузки использовать одновременно несколько гаек с размещенными в них роликами.
Далее изобретение иллюстрируется чертежами, на которых изображено:
- на фиг. 1 - продольный разрез винтовой передачи параллельной схемы (см. фиг. 2, разрез по А-А);
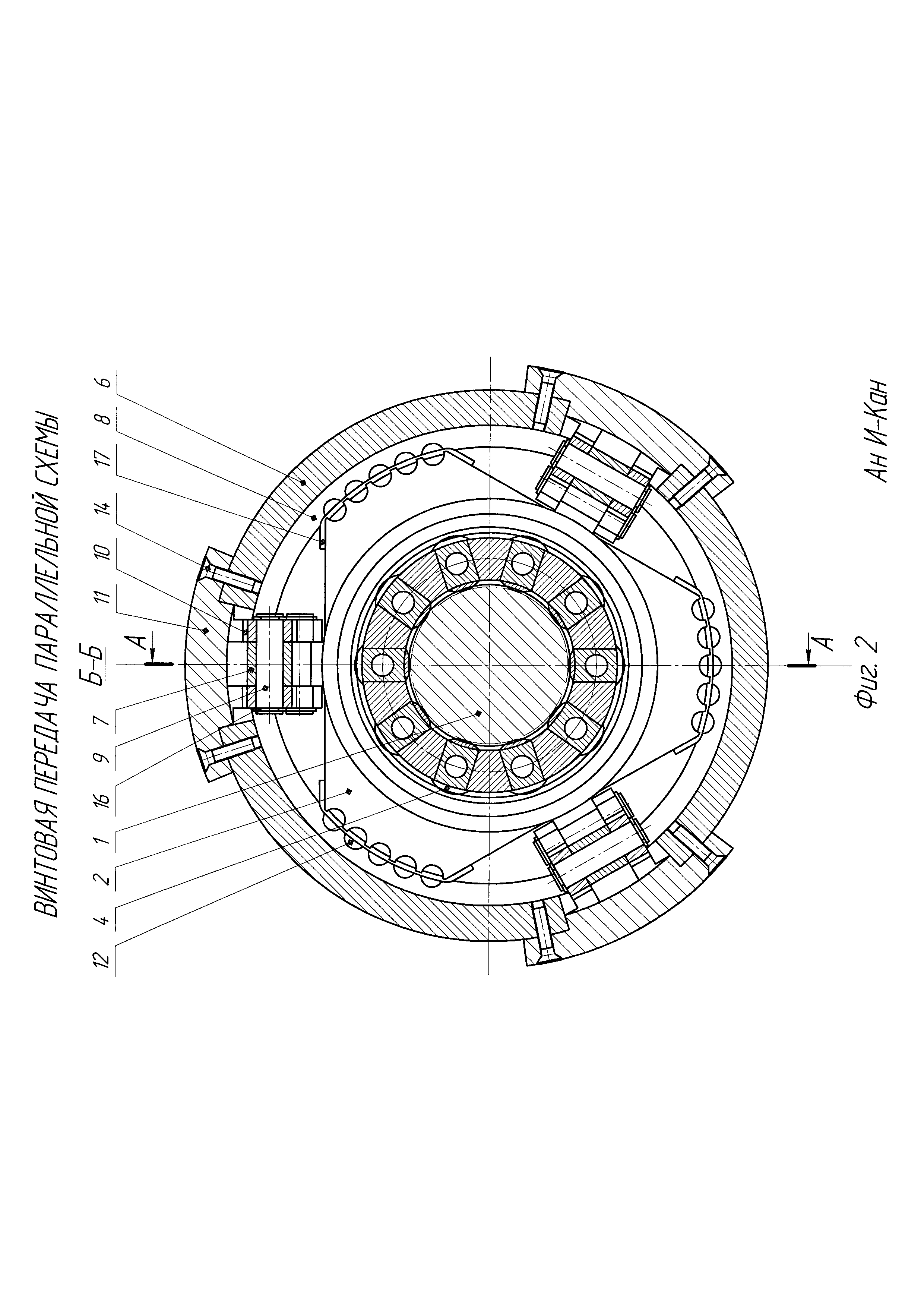
- на фиг. 2 - поперечный разрез винтовой передачи параллельной схемы (см. фиг. 1, разрез по Б-Б);
- на фиг. 3 - поперечный разрез винтовой передачи параллельной схемы (см. фиг. 1, разрез по В-В);
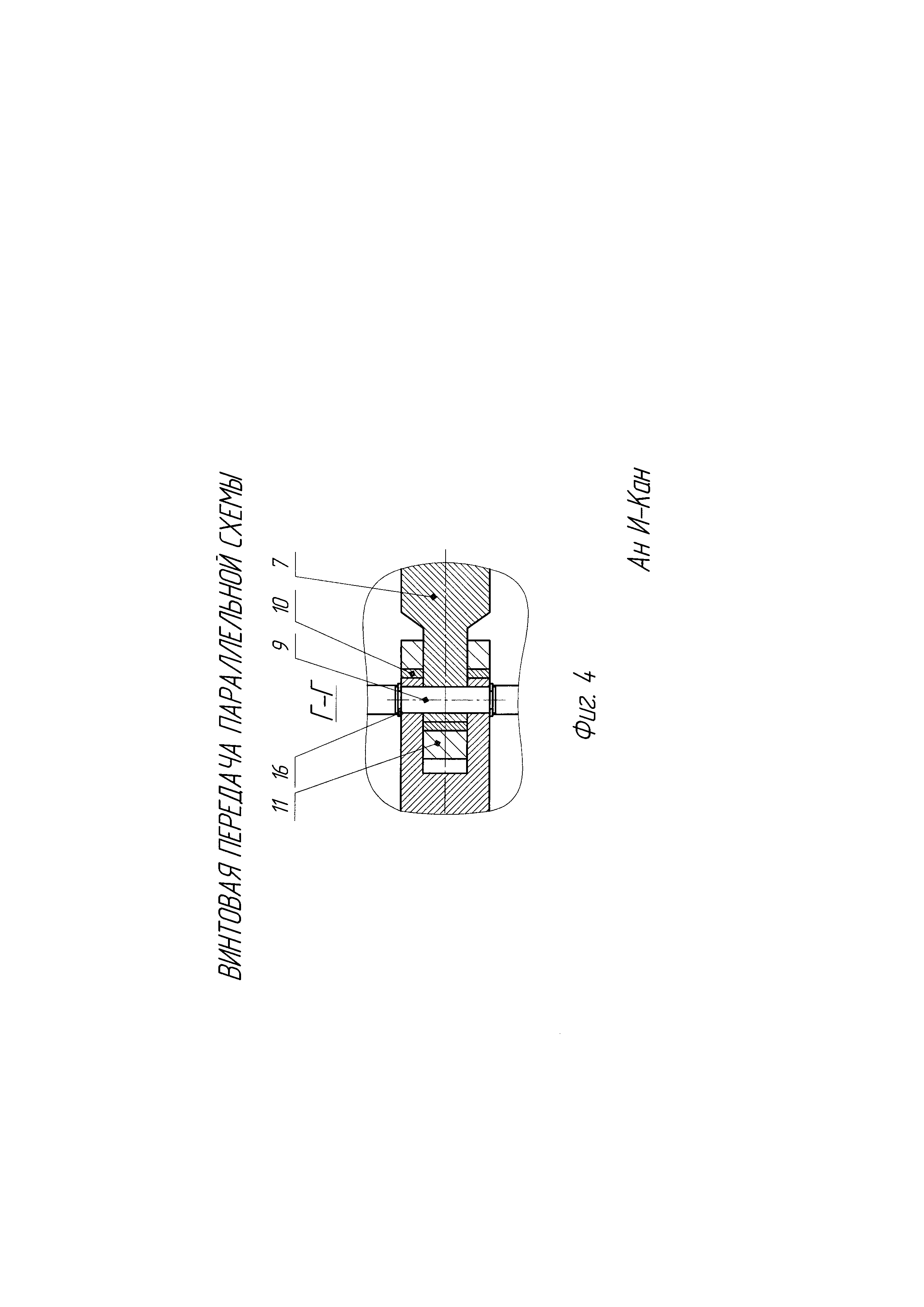
- на фиг. 4 - фрагмент горизонтального разреза винтовой передачи параллельной схемы (см. фиг. 1, разрез по Г-Г);
- на фиг. 5 и фиг. 6 - трехмерные модели сепараторов;
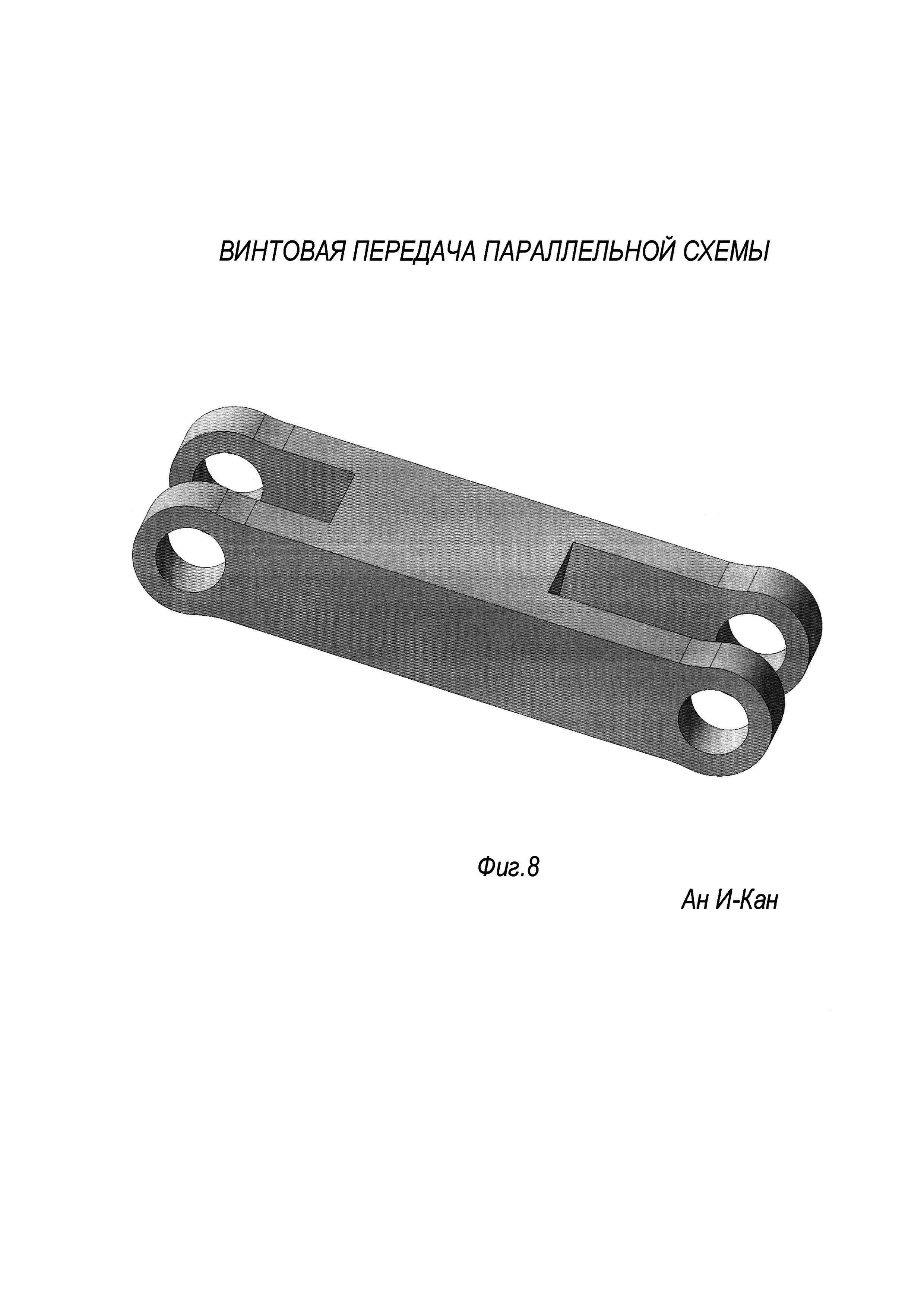
- на фиг. 7 и фиг. 8 - трехмерные модели поводков;
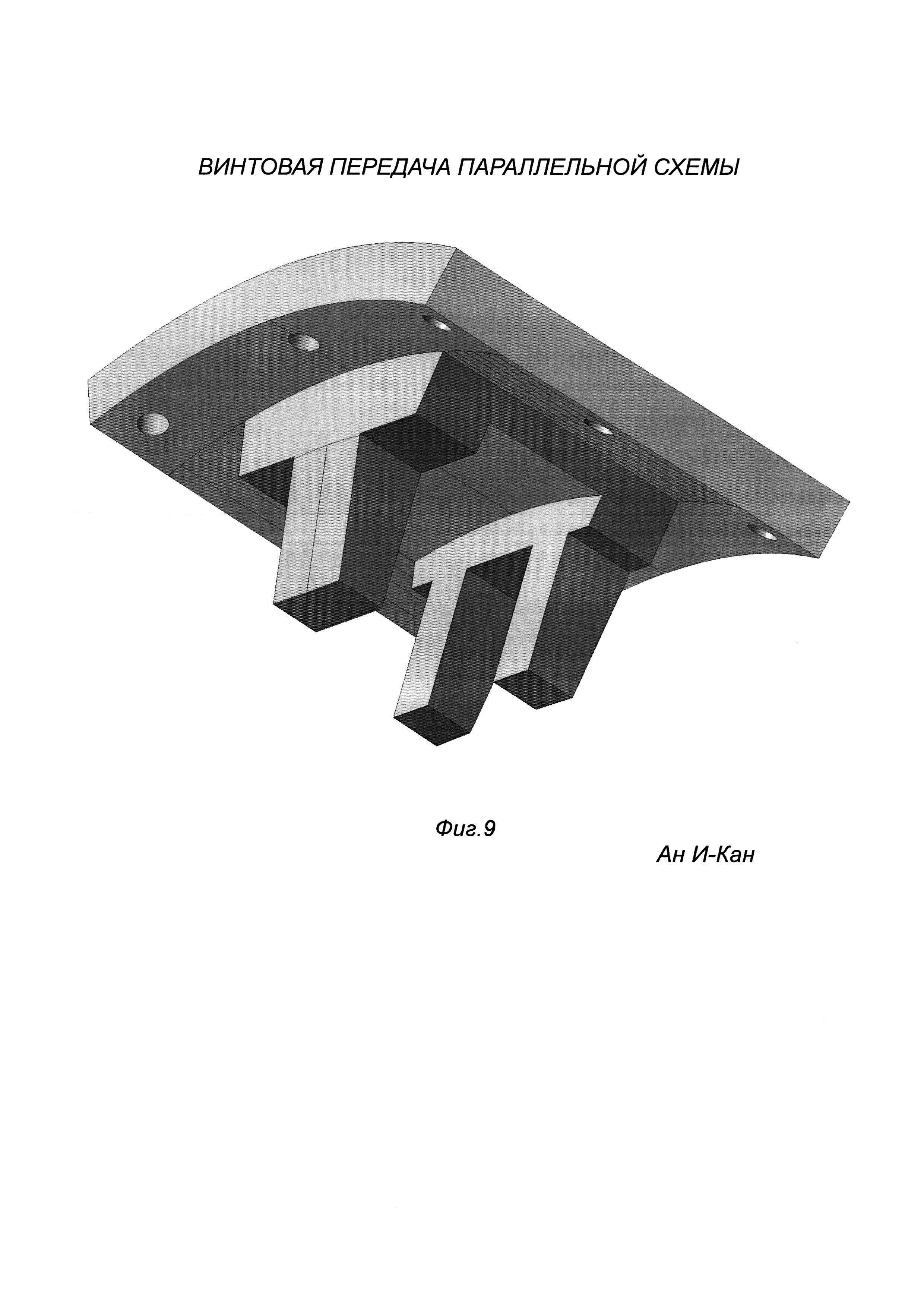
- на фиг. 9 - трехмерная модель вилки.
Винтовая передача параллельной схемы содержит:
винт 1 (фиг. 1-3); две гайки 2 (фиг. 1-3), в которые с двух сторон запрессованы зубчатые венцы 3 (фиг. 1); с каждой гайкой 1 взаимодействует по десять роликов 4 (фиг. 1-3), которые позиционируются с помощью сепараторов 5 (фиг. 1, 5, 6); стакан 6 (фиг. 1-3) с двумя крышками 8 (фиг. 1-3), внутри которого находятся шесть поводков 7 (фиг. 1-4, 7, 8); девять пальцев 9 (фиг. 1-4), связывающие между собой поводки 7 и гайки 2; шесть подшипников 10 (фиг. 1, 2, 4); три вилки 11 (фиг. 1-3, 9), вставленные в гнезда стакана 6; ролики 12 (фиг. 1-3), исключающие относительное вращение гаек 2; винты 13 (фиг. 1); винты 14 (фиг. 1); стопорные кольца 15 (фиг. 1); стопорные кольца 16 (фиг. 2-4); фиксаторы 17 (фиг. 1-3).
Винтовая передача параллельной схемы работает следующим образом.
Рассмотрим случай, когда винт является входным звеном и совершает вращательное движение, а выходным звеном - стакан, перемещающийся поступательно вдоль оси.
При сообщении вращательного движения винту 1 ролики 4, обкатываясь по поверхностям винта и гаек 2, удерживаемых роликами 12, крышками 8, винтами 13 и стаканом 6, совершают планетарные движения относительно винта 1 и гаек 2. При этом ролики 4 не имеют возможность двигаться относительно гаек 2 в осевом направлении из-за равенства угла наклона резьб, а также сепараторов 5 и передачи с зубчатыми венцами 3. При совершении планетарного движения относительно винта 1 ролики 4 дополнительно получают поступательное движение вдоль оси винта, так как углы наклона резьб разные, хотя шаги одинаковые. Осевое перемещение роликов 4 передается гайкам 2, затем через пальцы 9 поводкам 7, далее подшипникам 10 и вилкам 11, закрепленным винтами 14 в стакане 6.
Для обеспечения работоспособности передачи необходимо при сборке предусмотреть острый угол α и зазор δ (фиг. 1), а также для сохранения величины зазора δ синхронизировать перемещение осей роликов 4 (пример решения при помощи сепараторов показан на фиг. 5, 6).
Предложенное изобретение позволит увеличить нагрузочную способность передачи (двукратно в рассмотренном примере), не меняя размеры винта и гайки, а за счет распределения общей нагрузки на отдельные внутренние передачи. При этом КПД передачи остается без изменения.
Реферат
Изобретение относится к области машиностроения, а более конкретно к механическим предачам. Винтовая передача параллельной схемы содержит винт (1), гайки (2), ролики (4) в сепараторах (5), стакан (6), поводки (7) и вилки (11). Гайки с роликами объединены группой Ассура с помощью поводков. Ролики (12) исключают относительное вращение гаек (2). Ролики (4) и гайки (2) имеют равенство шагов резьбы и ее углов наклона, при этом указанные углы наклона не совпадают с углом наклона резьбы винта (1). На звенья группы Ассура действует суммарная нагрузка от всех гаек. Группа Ассура является статически определимой кинематической цепью и распределение усилий в кинематических парах и на звеньях происходит однозначно. Достигается повышение нагрузочной способности. 1 з.п. ф-лы, 9 ил.
Комментарии