Шарнирный многовершинный механизм - RU2777123C1
Код документа: RU2777123C1
Чертежи


Описание
Изобретение относится к области машиностроения, а именно к шарнирным механизмам параллельной структуры, и может найти применения в роботах и манипуляторах, солнечных панелях и многослойных рефлекторах антенн изменяемой конфигурации.
Известен 26-звенный шарнирный механизм, содержащий два сложных 6-шарнирных звена с 12 сложными сферическими шарнирами и вращательным приводом от шести совместно управляемых приводных двигателей (книга Смелягин А.И. Структура машин, механизмов и конструкции: Учебное пособие. - Москва, ИНФА-М. 2019 г., c. 154, рис. 2.74) - аналог.
Недостатками известного шарнирного механизма являются сложность конструкции и системы управления шестью приводными двигателями, а также большие габариты механизма.
Наиболее близким к предлагаемому изобретению является 12-звенный шарнирный механизм, содержащий три сложных трехшарнирных подвижных рычага и выполненный с приводом от трех совместно управляемых двигателей (книга Вульфсон И.И. и др. «Механика машин». - Москва: Высшая школа. 1996 г., с. 25, рис. 1.15) - прототип.
Недостатками указанного шарнирного механизма являются сложность конструкции, большие габариты и вес, высокая трудоемкость изготовления и сложность системы согласованного управления тремя приводными двигателями для перемещения всего одного рабочего органа.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, снижении габаритов и веса шарнирного механизма вместе с его приводом, а также снижение трудоемкости его управления.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь механизма выполнена в виде шарнирного многозвенника, стороны которого выполнены в виде двухшарнирных звеньев, например, одинаковой длины, которые подвижно соединены между собой посредством одноподвижных вращательных кинематических пар с параллельными осями вращения и образуют расположенные по периметру упомянутого шарнирного многозвенника вершины, которые кинематически связаны между собой, а также с опорным основанием и со входным звеном через двухшарнирные соединительные рычаги.
Сущность изобретения поясняется чертежами на фиг.1, фиг.2, фиг.3, фиг.4, фиг.5, фиг.6, фиг.7, фиг.8, фиг.9, фиг.10, фиг.11, фиг.12 и фиг.13.
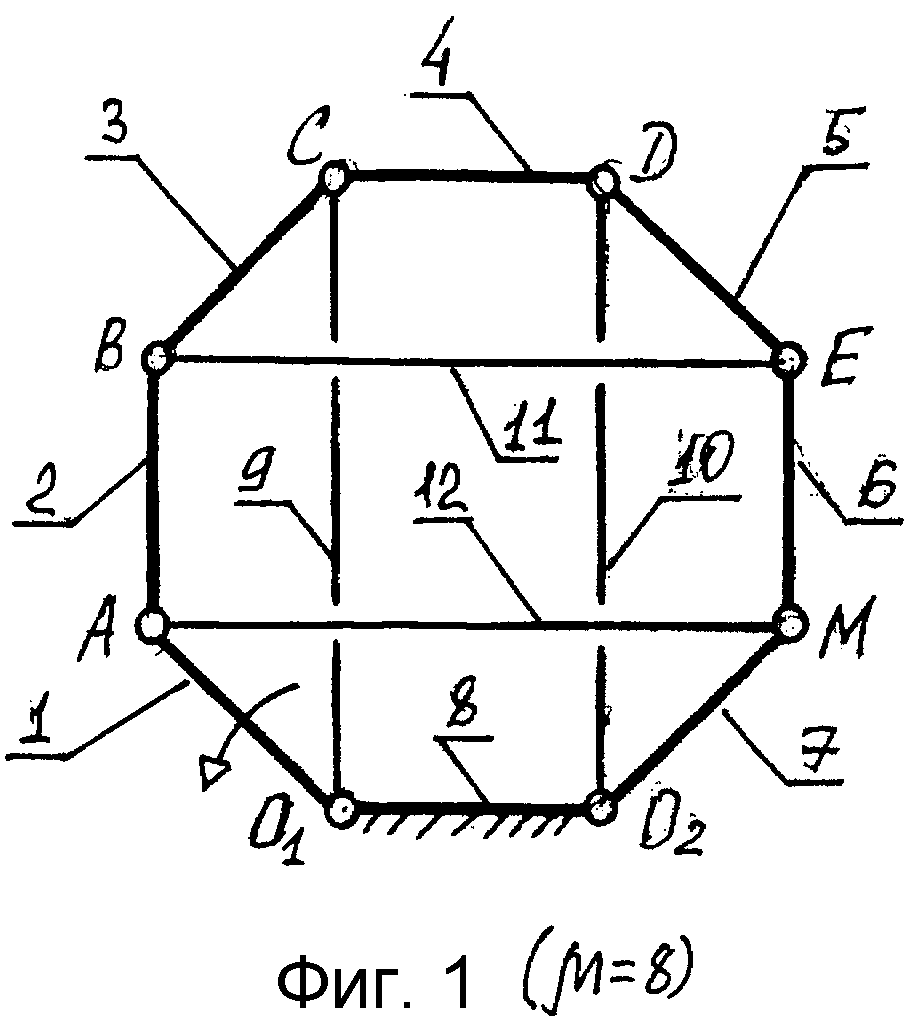
На фиг.1 изображен общий вид предлагаемого шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного восьмизвенника O1ABCDEMO2, составленного из восьми двухшарнирных звеньев 1, 2, 3, 4, 5, 6, 7 и 8, а вершины O1, A, B, C, D, E, M и O2 (μ = 8) восьмизвеника O1ABCDEMO2 попарно кинематически связаны между собой через четыре установленных внутри этого восьмизвенника O1ABCDEMO2 двухшарнирных соединительных рычагов 9, 10, 11 и 12 (nx = 4) для образования 12-звенного шарнирного механизма с одной степенью свободы (W = 1). в котором все вершины O1, А, В, С, D, Е, M, O2 выполнены в виде восьми двойных цилиндрических шарниров, а входное звено 1 установлено на опорном основании 8.
На фиг.2 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного десятизвенника O1ABCDEFGHO2 составленного из десяти двухшарнирных звеньев 1, 2, 3, 4, 5, 6, 7, 8, 9 и 10, а вершины O1, A, B, C, D, E, F, G, Н и О2 (μ = 10) десятизвенника O1ABCDEFGHO2 попарно кинематически связаны между собой через шесть двухшарнирных соединительных рычагов 11, 12, 13, 14, 15 и 16 (nx = 6), установленных внутри этого десятизвенника O1ABCDEFGHO2 для образования 16-звенного шарнирного механизма, выполненного с одной степенью свободы (W = 1) и входным звеном 1, в котором восемь вершин O1, A, B, D, E, F, G и O2 выполнены в виде двойных цилиндрических шарниров, другие две вершины С и H выполнены в виде тройных цилиндрических шарниров, а входное звено 1 установлено на опорном основании 10.
На фиг.3 представлен вариант выполнения шарнирного многовершинного механизма манипулятора с тремя степенями свободы (W = 3), в котором замкнутая кинематическая цепь выполнена в виде выходного шарнирного трехзвенника ABC с вершинами А, В и С (числом μ = 3), составленного из трех двухшарнирных звеньев 1, 2 и 3, к которым подвижно присоединены двухшарнирные соединительные рычаги 4, 5 и 6 числом пх = μ = 3, концы которых изогнуты в параллельных между собой плоскостях и выполнены с отверстиями для параллельной установки в них осей цилиндрических шарниров А, В, С, O4, O5 и O6. Опорное основание 10 содержит 3 опорных шарнира О1, О2 и О3, с которыми связаны три входных звена, 7, 8 и 9, а выходной шарнирный трехзвеник ABC выполнен с возможностью закрепления на нем разных рабочих органов 11, 12 и 13.
На фиг.4 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного четырехзвенника ABCD с числом вершин А, В, С и D, равным μ = 4, образованных сборкой из четырех двухшарнирных звеньев 1, 2, 3 и 4, а также из пх = μ = 4 двухшарнирных соединительных рычагов 5, 6, 7 и 8. Опорное основание 9 содержит 4 опорных шарнира О1, O2, O3, O4 и два входных звена 10 и 11. Механизм имеет две степени свободы (W = 2) и является одинадцатизвенным с двумя приводными вращательными двигателями.
На фиг.3 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного шестизвенника ABCDEF, вершины которого А, В, С, D, Е и F (μ = 6) в виде пяти двойных B, C, D, E, F и одного тройного А многократных цилиндрических шарниров, кинематически связаны с шестью двухшарнирными соединительными рычагами 7, 8, 9, 10, 11, 12 (nx = μ = 6), где рычаг 12 установлен внутри шестизвенника ABCDEF между его вершинами А и D. Другие пять рычагов 7, 8, 9, 10 и 11 установлены снаружи по периметру шестизвенника ABCDEF и подвижно соединены с опорным основанием 13 и установленным на нем входным звеном 14 четырнадцатизвенного механизма с шестизвенником ABCDEF, составленным из 6 двухшарнирных звеньев 1, 2, 3, 4, 5 и 6. Механизм имеет одну степень свободы (W = 1). Рычаги 8, 9, 10 и 11 образуют два шарнирных параллелограмма О2ВСО3 и O4EFO5, соединенных между собой через шарнирный шестизвенник ABCDEF.
На фиг.6 представлен вариант выполнения шарнирного многовершинного механизма, в котором шарнирный шестизвенник ABCDEF составлен из шести двухшарнирных звеньев (nx = 6) 1, 2, 3, 4, 5 и 6. Внутри этого шестизвенника ABCDEF между его вершинами соответственно В и Е,С и F установлено два двухшарнирных соединительных рычага 7 и 8, которые образуют с этими вершинами два двойных и два тройных многократных цилиндрических шарнира B, C, E и F. Другие четыре двухшарнирных соединительных рычага 9, 10, 11 и 12 установлены снаружи по периметру шестизвенника ABCDEF и подвижно соединены с четырехшарнирным опорным основанием 13 и установленным на нем входным звеном 14 для образования четырнадцатизвенного одноподвижного шарнирного механизма (W = 1) с четырмя двойными А, В, С, D и двумя тройными Е и F многократными цилиндрическими шарнирами. Число рычагов 7, 8, 9, 10, 11 и 12 равно числу вершин А, В, С, Д, Е и F (nx = μ = 6).
На фиг.7 представлен вариант выполнения шарнирного многовершинного механизма с W = 1, в котором замкнутая кинематическая цепь содержит шестизвенник ABCDEF, составленный из двухшарнирных звеньев 1, 2, 3, 4, 5 и 6, внутри которого посредством двух двойных A, D и четырех тройных В, С, Е и F многократных цилиндрических шарниров установлены три двухшарнирных соединительных рычага 7, 8 и 9. Другие три двухшарнирных соединительных рычага 10, 11 и 12 установлены снаружи по периметру шестизвенника ABCDEF и подвижно соединены через опорные шарниры O1, O2 и O3 с опорным основанием 13 и установленным на нем входным звеном 14 с входным шарниром 04 для образования 14-звенного шарнирного механизма с трехшарнирным опорным основанием 13.
На фиг.8 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного пятизвенника ABCDE, составленного из пяти двухшарнирных звеньев 1, 2, 3, 4, 5 и включает пять двухшарнирных соединительных рычагов 6, 7, 8, 9 и 10, общее число которых nx равно числу вершин μ этого пятизвенника А, В, С, D и Е, где nx = μ = 5.
Двухшарнирные соединительные рычаги 6, 7, 8, 9 и 10 расположены по всему периметру шарнирного пятизвенника ABCDE и подвижно присоединены одним концом к вершинам A, B, C, D и E этого пятизвенника посредством двойных цилиндрических шарниров, а другим концом подвижно присоединены к опорному основанию 11 или к установленному на опорном основании 11 входному звену 12 для образования двенадцатизвенного рычажного механизма с одной степенью свободы W = 1.
На фиг.9 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного шестизвенника ABCDEF, составленного из шести двухшарнирных звеньев 1, 2, 3, 4, 5, 6 и включает шесть двухшарнирных соединительных рычагов 7, 8, 9, 10, 11 и 12, общее число nx которых равно числу μ вершин А, В, С, D, Е и F этого шестизвенника, где nx = μ = 6.
Двухшарнирные соединительные рычаги 7, 8, 9, 10, 11 и 12 расположены по всему периметру шарнирного шестизвенника ABCDEF и подвижно присоединены одним концом к вершинам А, В, С, D, Е и F посредством двойных цилиндрических шарниров, а другим концом подвижно присоединены к опорному основанию 13 или к установленному на опорном основании 13 входному звену 14 для образования четырнадцатизвенного рычажного механизма с одной степенью свободы W = 1.
На фиг.10 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного семизвенника ABCDEFG, составленного из семи двухшарнирных звеньев 1, 2, 3, 4, 5, 6 и 7 и включает семь двухшарнирных соединительных рычагов 8, 9, 10, 11, 12, 13 и 14, число которых nx = 7 равно числу μ вершин А, В, С, D, Е, F и G этого семизвенника, где nx = μ = 7. Механизм имеет одну степень свободы (W = 1). выполнен со входным звеном 15 и представляет шестнадцатизвенную одноподвижную замкнутую структуру.
На фиг 11 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного восьмизвенника ABCDEFGH, составленного из восьми двухшарнирных звеньев 1, 2, 3, 4, 5, 6, 7 и 8 и включает восемь двухшарнирных соединительных рычагов 9, 10, 11, 12, 13, 14, 15 и 16, число которых nx = 8 равно числу μ вершин А, В, С, D, Е, F, G и Н этого восьмизвенника. где nx = μ = 8. Механизм имеет одну степень свободы (W = 1), выполнен со входным звеном 17 и представляет 18-звенную одноподвижную замкнутую структуру.
На фиг.12 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного девятизвенника ABCDEFGHN с присоединенными к нему 9-ю двухшарными соединительными рычагами 10, 11, 12, 13, 14, 15, 16, 17 и 18, число которых nx = 9 равно числу μ вершин А, В, С, D, Е, F, G, Н и N этого девятизвенника, где nx = μ = 9. Механизм имеет одну степень свободы (W = 1), выполнен со входным звеном 19 и представляет 20-звенную одноподвижную замкнутую структуру. Шарнирный девятизвенник ABCDEFGHN составлен из девяти двухшарнирных звеньев 1, 2, 3, 4, 5, 6, 7, 8 и 9.
На фиг.13 представлен вариант выполнения шарнирного многовершинного механизма, в котором замкнутая кинематическая цепь выполнена в виде шарнирного десятизвенника А, В, С, D, Е, F, G, H, N и Q, составленного из десяти двухшарнирных звеньев 1, 2, 3, 4, 5, 6, 7, 8, 9 и 10 и включает десять двухшарнирных соединительных рычагов 11, 12, 13, 14, 15, 16, 17, 18, 19 и 20, число которых nx = 10 равно числу μ вершин А, В, С, D, Е, F, G, H, N и Q этого десятизвенника. где nx = μ = 10. Механизм имеет одну степень свободы (W = 1), выполнен со входным звеном 21 и представляет 22-звенную одноподвижную замкнутую структуру.
Работа представленного шарнирного многовершинного механизма заключается в следующем и подтверждена на действующих физических моделях механизмов с W ≥ 1 на фиг. 1-13.
Задаваемое вращение входного звена шарнирного механизма (обозначенное стрелкой на фиг.1-13) преобразуется в замкнутый кинематической цепи в различное движение разнообразных рабочих органов, которые могут быть закреплены на любом из остальных звеньев этой замкнутой кинематической цепи. Все представленные на фиг.1 - фиг.13 разнообразные варианты выполнения шарнирных многовершинных механизмов от W = 1 до W = 3 и до 22-звенных содержат только простые в изготовлении и сборке двухшарнирных звенья, соединяемые простыми цилиндрическими шарнирами с параллельными осями вращения соединяемых звеньев, выполненными на основе одноподвижных вращательных кинематических пар. надежно работающих без заклинивания в любых условиях их эксплуатации. Все представленные на фиг.1-13 шарнирные многовершинные варианты механизмов имеют число степеней свободы W ≥ 1. равное числу указанных круговыми стрелками входных звеньев, которые реализуются в этих механизмах за счет простой системы управления приводом одного из приводных вращательных двигателей.
Достигаемый в предлагаемом шарнирном многовершинном механизме положительный эффект заключается в упрощении конструкции, снижении его габаритов, веса, трудоемкости и стоимости изготовления, а также упрощении системы управления его приводом запуска только одного вращательного двигателя.
Реферат
Изобретение относится к машиностроению. Шарнирный многовершинный механизм содержит замкнутую кинематическую цепь в виде шарнирного многозвенника, стороны которого выполнены в виде двухшарнирных звеньев, которые подвижно соединены между собой посредством одноподвижных вращательных кинематических пар с параллельными осями вращения и образуют расположенные по периметру этого шарнирного многозвенника вершины, которые кинематически связаны между собой, а также с опорным основанием и со входным звеном через двухшарнирные соединительные рычаги. Обеспечивается упрощение конструкции, снижение габаритов и веса. 9 з.п. ф-лы, 13 ил.
Формула
Документы, цитированные в отчёте о поиске
Шарнирный механизм
Комментарии