Гусеничный сварочный робот и способ управления таким роботом - RU2754728C1
Код документа: RU2754728C1
Чертежи




Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] В настоящей заявке испрошен приоритет патентной заявки Китая №2018114965037, поданной в патентное ведомство Китая (CNIPA) 7 декабря 2018, поименованной "Гусеничный сварочный робот и способ управления этим роботом".
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к устройствам для соединения сваркой и, в частности, к гусеничному сварочному роботу и способу управления эти роботом.
УРОВЕНЬ ТЕХНИКИ
[0003] В области соединения сваркой металлических конструкций, когда операция соединения сваркой должна выполняться в отношении большеразмерного или среднеразмерного плоского или криволинейного оборудования, такого как стальные резервуары-хранилища, сферические резервуары, трубы и корпуса судов, обычно такая операция выполняется в основном вручную, характеризуется высокой интенсивностью труда и тяжелыми производственными условиями, причем такую операцию должны выполнять группа работников, сварщики должны иметь высокую квалификацию, и качество сварки не всегда оказывается высоким, при этом снижается производительность труда вследствие того, что операция соединения сваркой зависит одновременно от множества факторов. В настоящее время при непрерывном усовершенствовании технологий соединения сваркой с применением промышленных роботов сварочные роботы, доступные на современном рынке, в основном являются шарнирными.
[0004] Известные сварочные роботы не могут выполнять операции соединения сваркой на большеразмерных и среднеразмерных плоских или криволинейных элементах конструкций, таких как стальные резервуары-хранилища, сферические резервуары и корпуса судов; при этом ручная операция соединения сваркой, выполняемая на плоских или криволинейных поверхностях большеразмерных и среднеразмерных элементах конструкций, характеризуется высокой интенсивностью труда и тяжелыми производственными условиями, причем такая операция должна выполняться группой работников, сварщики должны иметь высокую квалификацию, и качество сварки не всегда оказывается высоким, при этом снижается производительность труда вследствие того, что операция соединения сваркой зависит одновременно от множества факторов.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Задачи настоящего изобретения включают, например, обеспечение гусеничного сварочного робота для устранения недостатков уровня техники, который имеет высокую адаптируемость к производственным условиям и высокую производительность.
[0006] Задачи настоящего изобретения также включают, например, обеспечение способа управления гусеничным сварочным роботом.
[0007] Варианты реализации настоящего изобретения осуществлены следующим образом:
[0008] Согласно одному варианту реализации настоящего изобретения обеспечен гусеничный сварочный робот, содержащий регулируемый магнитный притягивающий модуль, колесно-гусеничные ходовые механизмы, раму гусеничного хода и сварочное навесное устройство, которое расположено на раме гусеничного хода;
[0009] колесно-гусеничные ходовые механизмы расположены на двух противоположных концах рамы гусеничного хода для подачи питания для перемещения на гусеницах указанной рамы гусеничного хода; и
[0010] регулируемый магнитный притягивающий модуль расположен на раме гусеничного хода между двумя колесно-гусеничными ходовыми механизмами.
[0011] При необходимости каждый колесно-гусеничный ходовой механизм содержит магнитный держатель, роликовую цепь, ведущее колесо, ведомое колесо и первое приводное устройство;
[0012] причем первое приводное устройство прочно установлено на раме гусеничного хода;
[0013] как ведущее колесо, так и ведомое колесо расположены с возможностью вращения на раме гусеничного хода;
[0014] ведущее колесо и ведомое колесо соединены роликовой цепью;
[0015] магнитный держатель расположен на роликовой цепи.
[0016] При необходимости рама гусеничного хода снабжена направляющим пазом;
[0017] ведомое колесо расположено с возможностью скольжения в направляющем пазу; и
[0018] рама гусеничного хода обеспечена вторым приводным устройством, выполненным с обеспечением возможности перемещения ведомого колеса в направляющем пазу таким образом, что натяжение соответствующей роликовой цепи увеличивается или уменьшается.
[0019] При необходимости рама гусеничного хода содержит регулировочный узел и регулировочный винт, причем регулировочный узел взаимодействуют с возможностью скольжения с направляющим пазом, регулировочный винт ввинчен в раму гусеничного хода, регулировочный винт соединен с возможностью вращения с регулировочным узлом, и регулировочный винт закреплен на регулировочном узле в осевом направлении регулировочного винта; регулировочный узел выполнен с возможностью скольжения в направляющем пазу при вращении регулировочного винта; и ведомое колесо с возможностью вращения соединено с регулировочным узлом.
[0020] При необходимости рама гусеничного хода содержит регулировочный узел и регулировочный винт, причем регулировочный узел взаимодействует с возможностью скольжения с направляющим пазом, регулировочный винт ввинчен в раму гусеничного хода, регулировочный винт прикреплен к раме гусеничного хода в осевом направлении регулировочного винта, и регулировочный винт соединен с возможностью вращения с регулировочным узлом; регулировочный узел выполнен с возможностью скольжения в направляющем пазу при вращении регулировочного винта; и ведомое колесо соединено с возможностью вращения с регулировочным узлом.
[0021] При необходимости первое приводное устройство содержит серводвигатель и угловой редуктор, причем серводвигатель соединен с угловым редуктором, при этом серводвигатель и угловой редуктор прикреплены к раме гусеничного хода, ведущее колесо прикреплено к фланцу углового редуктора, и ведущее колесо выполнено с возможностью приведения во вращение серводвигателем.
[0022] При необходимости рама гусеничного хода содержит соединительную пластину кузова и две боковых пластины, которые соединены с соединительной пластиной кузова и расположены с противоположных сторон, причем два колесно-гусеничных ходовых механизма установлены на указанных двух боковых пластинах соответственно.
[0023] При необходимости сварочное навесное устройство содержит сварочный держак и механизм линейных колебаний сварочной головки;
[0024] причем сварочный держак прочно установлен на раме гусеничного хода;
[0025] механизм линейных колебаний сварочной головки содержит первый линейный двигатель, первый линейный направляющий рельс, третье приводное устройство, первое зубчатое колесо передачи и первую зубчатую рейку передачи; и
[0026] первый линейный двигатель прочно установлен на сварочном держаке, и первый линейный направляющий рельс соединен с первым линейным двигателем; первое зубчатое колесо передачи расположено с возможностью вращения на первом линейном направляющем рельсе; первое зубчатое колесо передачи
находится в зацеплении с первой зубчатой рейкой передачи, и первая зубчатая рейка передачи взаимодействует с возможностью скольжения с первым линейным направляющим рельсом; третье приводное устройство соединено с первым зубчатым колесом передачи для приведения во вращение первого зубчатого колеса передачи для обеспечения возвратно-поступательного перемещения скольжением первой зубчатой рейки передачи относительно первого линейного направляющего рельса.
[0027] При необходимости сварочное навесное устройство дополнительно содержит механизм зажима и угловых колебаний сварочной головки;
[0028] причем механизм зажима и угловых колебаний сварочной головки содержит генератор угловых колебаний, фиксирующий механизм и зажим;
[0029] генератор угловых колебаний соединен с зажимом для обеспечения качания сварочной головки, расположенной в зажиме; и
[0030] фиксирующий механизм расположен на генераторе угловых колебаний и жестко соединен с первой зубчатой рейкой передачи.
[0031] При необходимости генератор угловых колебаний содержит двигатель и поворотную платформу, которые соединены друг с другом, причем зажим соединен с поворотной платформой, и фиксирующий механизм соединен с двигателем.
[0032] При необходимости сварочное навесное устройство дополнительно содержит механизм линейных колебаний для лазерного слежения и модуль лазерного слежения;
[0033] механизм линейных колебаний для лазерного слежения содержит второй линейный двигатель, второй линейный направляющий рельс, четвертое приводное устройство, второе зубчатое колесо передачи и вторую зубчатую рейку передачи; и
[0034] второй линейный двигатель прочно установлен на сварочном держаке, и второй линейный направляющий рельс соединен со вторым линейным двигателем; второе зубчатое колесо передачи расположено с возможностью вращения на втором линейном направляющем рельсе; второе зубчатое колесо передачи находится в зацеплении со второй зубчатой рейкой передачи, и вторая зубчатая рейка передачи взаимодействует с возможностью скольжения со вторым линейным направляющим рельсом; четвертое приводное устройство соединено со вторым зубчатым колесом передачи для приведения во вращение второго зубчатого колеса передачи для обеспечения линейного возвратно-поступательного перемещения второй зубчатой рейки передачи.
[0035] При необходимости модуль лазерного слежения содержит камеру, лазерный датчик, установочную раму и мультифильтр;
[0036] причем камера, лазерный датчик и мультифильтр расположены на установочной раме; и
[0037] установочная рама прочно установлена на второй зубчатой рейке.
[0038] При необходимости гусеничный сварочный робот дополнительно содержит ветрозащитное устройство, соединенное с рамой гусеничного хода;
[0039] причем ветрозащитное устройство содержит крепежный кронштейн и ветрозащитный экран, которые соединены друг с другом, и крепежный кронштейн соединен со сварочным держаком; и
[0040] крепежный кронштейн содержит выдвижную пластину поступательного перемещения, выполненную с возможностью выдвижения и отвода в переднем и заднем направлениях, причем выдвижная пластина поступательного перемещения снабжена направляющим сквозным пазом, проходящим в левом и правом направлениях, и направляющим сквозным пазом, проходящим в переднем и заднем направлениях, которые имеют угол, образованный между ними, при этом ветрозащитный экран снабжен направляющим сквозным пазом, проходящим в верхнем и нижнем направлениях, причем выдвижная пластина поступательного перемещения соединена с ветрозащитным экраном, и ветрозащитный экран выполнен с возможностью скольжения относительно выдвижной пластины поступательного перемещения в направлении продолжения направляющего сквозного паза в верхнем и нижнем направлениях и в направлении продолжения направляющего сквозного паза в левом и правом направлениях таким образом, что обеспечена возможность регулировки ветрозащитного экрана в этих трех направлениях.
[0041] При необходимости крепежный кронштейн дополнительно содержит неподвижную опорную пластину и неподвижную соединительную пластину, которые соединены друг с другом, и неподвижная соединительная пластина взаимодействует с возможностью скольжения с выдвижной пластиной поступательного перемещения в направлении продолжения направляющего сквозного паза в переднем и заднем направлениях; и неподвижная опорная пластина выполнена с возможностью соединения с рамой гусеничного хода.
[0042] При необходимости выдвижная пластина поступательного перемещения содержит первую часть пластины и вторую часть пластины, которые соединены друг с другом, причем между первой частью пластины и второй частью пластины образован угол, при этом направляющий сквозной паз, проходящий в левом и правом направлениях, обеспечен в первой части пластины, и направляющий сквозной паз, проходящий в переднем и заднем направлениях, обеспечен во второй части пластины; первая часть пластины соединена с возможностью скольжения с ветрозащитным экраном, и вторая часть пластины соединена с возможностью скольжения с неподвижной соединительной пластиной.
[0043] При необходимости регулируемый магнитный притягивающий модуль содержит магнитный модуль и подъемный регулировочный модуль, причем подъемный регулировочный модуль соединен с магнитным модулем для управления подъемом и спуском магнитного модуля; и
[0044] подъемный регулировочный модуль содержит множество независимо управляемых подъемных механизмов, при этом угол и/или промежуток между магнитным модулем и поверхностью, прилипание к которой необходимо обеспечить, изменяются путем индивидуальной регулировки множества независимо управляемых подъемных механизмов.
[0045] При необходимости магнитный модуль содержит монтажный кожух, крышку и магнит, монтажный кожух имеет полость, в которой размещен магнит, и крышка соединена с монтажным кожухом для закрытия полости.
[0046] При необходимости каждый подъемный механизм содержит опорную раму, подъемный винт и регулировочную гайку, причем опорная рама соединена с рамой гусеничного хода, подъемный винт свинчен с регулировочной гайкой, регулировочная гайка с возможностью вращения соединена с опорной рамой, при этом регулировочная гайка прикреплена к опорной раме в осевом направлении регулировочной гайки; и подъемный винт соединен с магнитным модулем.
[0047] При необходимости опорная рама содержит желобчатый корпус и закрывающую пластину, причем желобчатый корпус снабжен ограничительным желобом; регулировочная гайка снабжена кольцевым ограничительным выступом, проходящим в направлении по окружности регулировочной гайки, и кольцевой ограничительный выступ проходит наружу в радиальном направлении регулировочной гайки из наружной периферийной поверхности регулировочной гайки; кольцевой ограничительный выступ размещен в ограничительном желобе, и закрывающая пластина соединена с желобчатым корпусом и выполнена с возможностью закрытия желобчатого отверстия ограничительного желоба, так что кольцевой ограничительный выступ заключен между крышкой и нижней частью ограничительного желоба.
[0048] Согласно одному варианту реализации настоящего изобретения дополнительно обеспечен способ управления гусеничным сварочным роботом, включающий следующие этапы:
[0049] S1. управление регулируемым магнитным притягивающим модулем для поддержки стабильной силы прилипания между гусеничным сварочным роботом и поверхностью, прилипание к которой необходимо обеспечить;
S2. получение информации о сварном шве;
S3. управление сварочной головкой для перемещения к местоположению сварного шва;
S4. управление сварочной головкой для поворота на угол, требуемый для процесса;
S5. регулировка рабочих параметров источника питания для сварки;
S6. начало сварки и управление перемещающимся гусеничным роботом при его автоматическом и автономном перемещении на гусеницах вдоль направления сварного шва и
S7. завершение сварки.
[0050] Варианты реализации настоящего изобретения обеспечивают, например, следующие предпочтительные технические эффекты по сравнению с уровнем техники:
[0051] В итоге в настоящем изобретении обеспечен гусеничный сварочный робот и способ управления этим роботом, причем гусеничный сварочный робот оборудован колесно-гусеничными ходовыми механизмами для перемещения на гусеницах без рельсов или направляющих, имеет большой диапазон сварки, может перемещаться по поверхности большеразмерных и среднеразмерных плоских или криволинейных элементов конструкций для выполнения соединения сваркой, может вертикально перемещаться на гусеницах на стенке и может выполнять операцию соединения сваркой при перемещении вперед или назад таким образом, что достигается соединение сваркой большеразмерных и среднеразмерных элементов конструкций во всех положениях, вспомогательное время соединения сваркой может быть значительно уменьшено, и экономическая эффективность производства повышена; величина магнитной силы прилипания регулируется регулируемым магнитным притягивающим модулем (9), так что гусеничный сварочный робот может перемещаться на гусеницах по плоской поверхности и криволинейной поверхности с большой кривизной и имеет высокую адаптируемость к производственным условиям.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0052] Для более ясной иллюстрации технических решений конкретных вариантов реализации настоящего изобретения или уровня техники ниже кратко описаны сопроводительные чертежи, используемые при описании конкретных вариантов реализации или уровня техники. Очевидно, что чертежи в следующем описании являются простыми иллюстрациями некоторых вариантов реализации настоящего изобретения. Специалистам понятно, что другие чертежи также могут быть получены из этих чертежей без каких-либо творческих усилий.
[0053] На ФИГ. 1 схематически изображен вид в перспективе, показывающий конструкцию гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0054] На ФИГ. 2 представлено покомпонентное изображение гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0055] На ФИГ. 3 изображен вид сбоку рамы гусеничного хода и колесно-гусеничного ходового механизма гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0056] На ФИГ. 4 схематически изображен вид в перспективе, показывающий конструкцию рамы гусеничного хода и колесно-гусеничного ходового механизма гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0057] На ФИГ. 5 изображен вид снизу гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
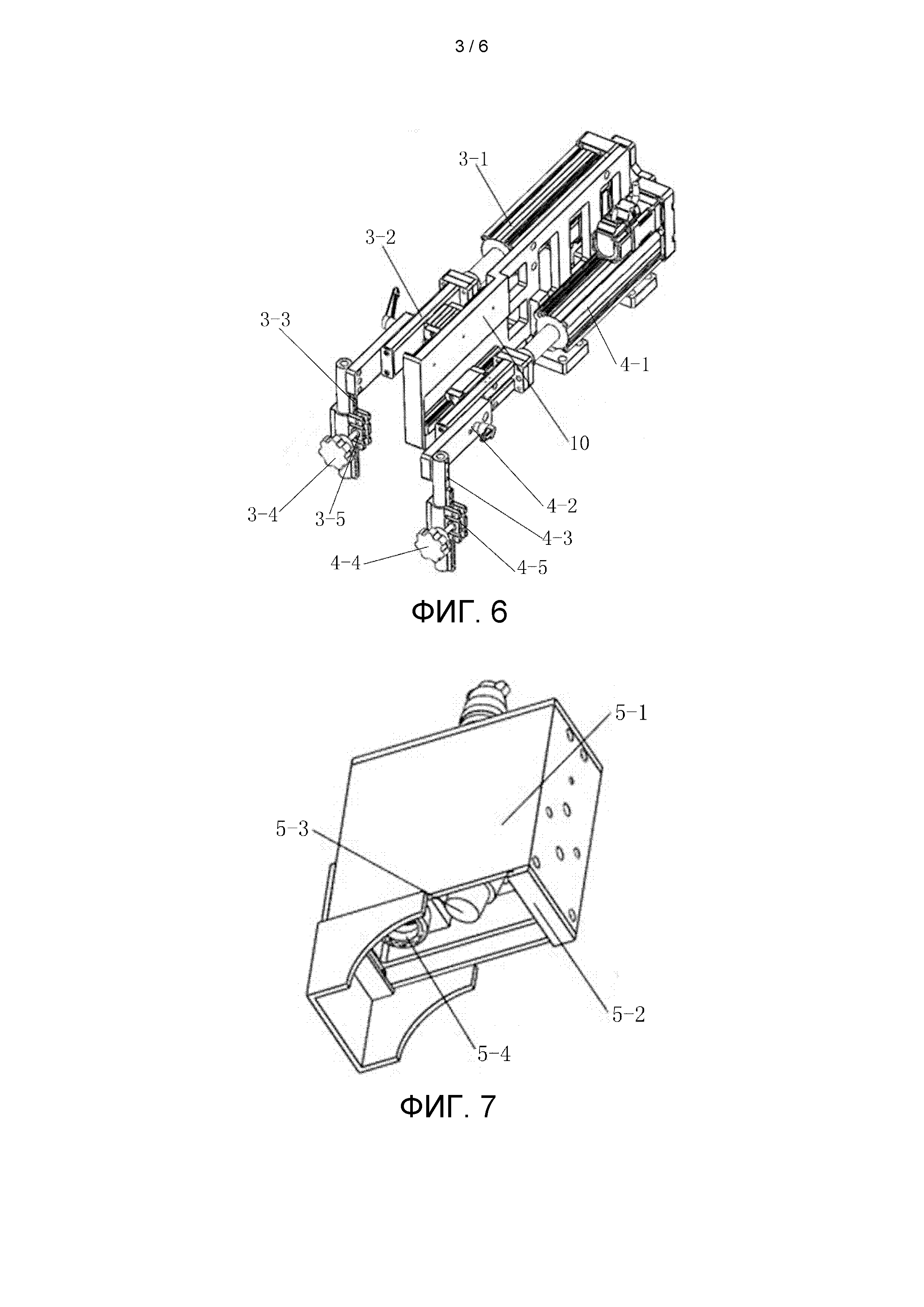
[0058] На ФИГ. 6 схематически изображен вид в перспективе, показывающий конструкцию механизма линейных колебаний для сварочной головки и механизма линейных колебаний для лазерного слежения гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0059] На ФИГ. 7 схематически изображен вид в перспективе модуля лазерного слежения гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0060] На ФИГ. 8 схематически изображен вид в перспективе механизма зажима и угловых колебаний сварочной головки гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0061] На ФИГ. 9 схематически изображен вид в перспективе ветрозащитного устройства гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0062] На ФИГ. 10 схематически изображен вид в перспективе регулируемого магнитного притягивающего модуля гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0063] На ФИГ. 11 изображена структурная схема, объясняющая принцип управления гусеничного сварочного робота согласно одному варианту реализации настоящего изобретения;
[0064] На ФИГ. 12 схематически изображен вид в перспективе крепежного кронштейна согласно одному варианту реализации настоящего изобретения;
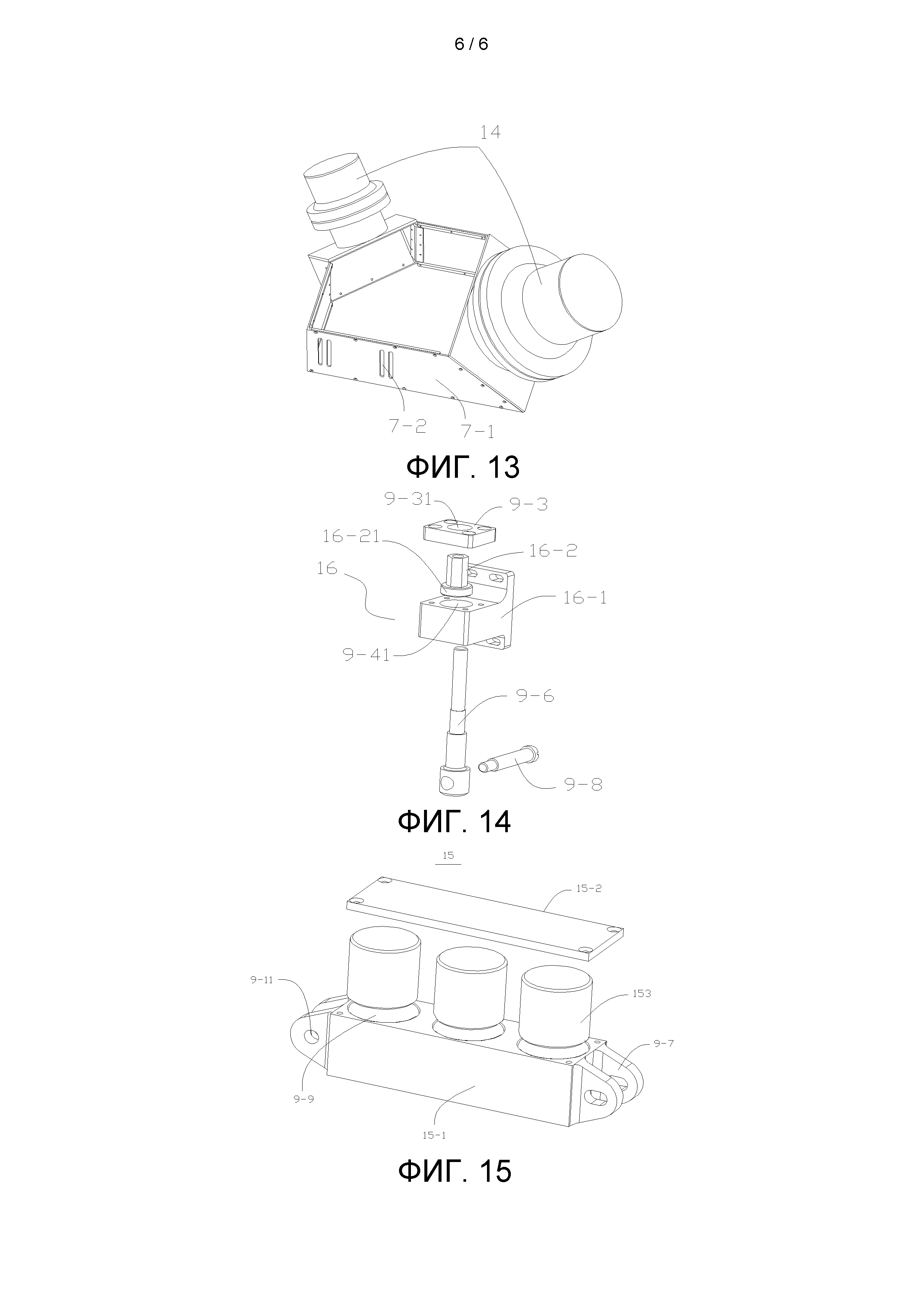
[0065] На ФИГ. 13 схематически изображен вид в перспективе ветрозащитного экрана согласно одному варианту реализации настоящего изобретения;
[0066] На ФИГ. 14 изображен поэлементный вид в перспективе подъемного регулировочного модуля согласно одному варианту реализации настоящего изобретения; и
[0067] На ФИГ. 15 схематически изображен поэлементный вид в перспективе магнитного модуля согласно одному варианту реализации настоящего изобретения.
[0068] СПИСОК ПОЗИЦИЙ
1 - Рама гусеничного хода;
1-1 - Соединительная пластина кузова;
1-2 - Направляющий паз;
1-3 - Регулировочный узел;
1-4 - Регулировочный винт;
1-5 - Боковая пластина;
1-6 - Механизм натяжения;
2 - Колесно-гусеничный ходовой механизм;
2-1 - Ведущее колесо;
2-2 - Магнитный держатель;
2-3 - Роликовая цепь;
2-4 - Ведомое колесо;
2-56 - Первое приводное устройство;
2-5 - Угловой редуктор;
2-6 - Серводвигатель;
3 - Механизм линейных колебаний сварочной головки;
3-1 - Первый линейный двигатель;
3-2 - Первый линейный направляющий рельс;
3-3 - Первая зубчатая рейка передачи;
3-4 - Третье приводное устройство;
3-5 - Первое зубчатое колесо передачи;
4 - Механизм линейных колебаний для лазерного слежения;
4-1 - Второй линейный двигатель;
4-2 - Второй линейный направляющий рельс;
4-3 - Вторая зубчатая рейка передачи;
4-4 - Четвертое приводное устройство;
4-5 - Второе зубчатое колесо передачи;
5 - Модуль лазерного слежения;
5-1 - Установочная рама;
5-2 - Мультифильтр;
5-3 - Лазерный датчик;
5-4 - Камера;
6 - Механизм зажима и угловых колебаний сварочной головки;
6-1 - Генератор угловых колебаний;
6-2 - Фиксирующий механизм;
6-3 - Зажим;
7 - Ветрозащитное устройство;
7-1 - Ветрозащитный экран;
7-2 - Направляющий сквозной паз, проходящий в верхнем и нижнем направлениях;
7-3 - Направляющий сквозной паз, проходящий в левом и правом направлениях;
7-4 - Выдвижная пластина поступательного перемещения;
7-41 - Первая часть пластины;
7-42 - Вторая часть пластины;
7-5 - Неподвижная опорная пластина;
7-51 - Крепежное отверстие;
7-6 - Неподвижный фланец;
7-7 - Подвижный фланец;
7-8 - Шаровой шарнир;
7-9 - Основное смотровое окно;
7-10 - Вспомогательное смотровое окно;
7-11 - Направляющий сквозной паз, проходящий в переднем и заднем направлениях;
7-12 - Верхняя прессованная полоса;
7-13 - Нижняя прессованная полоса;
7-14 - Неподвижная соединительная пластина;
7-141 - Первое соединительное отверстие;
8 - Датчик угловой ориентации;
9 - Регулируемый магнитный притягивающий модуль;
9-1 - Приводная рукоятка;
9-2 - Соединительное отверстие;
9-3 - Закрывающая пластина;
9-31 - Регулировочное отверстие;
9-4 - Желобчатый корпус;
9-41 - Ограничительный желоб;
9-5 - Поддерживающая установочная пластина;
9-6 - Подъемный винт;
9-7 - Монтажная проушина;
9-8 - Вращающийся вал;
9-9 - Полость;
9-10 - Крышка полости;
9-11 - Отверстие для вращающейся детали;
10 - Сварочный держак;
11 - Сварочное навесное устройство;
12 - Сварочная головка;
13 - Крепежный кронштейн;
14 - Смотровое окно;
15 - Магнитный модуль;
15-1 - Монтажный кожух;
15-2 - Крышка;
15-3 - Магнит;
16 - Подъемный регулировочный модуль;
16-1 - Опорная рама;
16-2 - Регулировочная гайка;
16-21 - Кольцевой ограничительный выступ.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0069] Технические решения настоящего изобретения ясно и полностью описаны ниже со ссылкой на сопроводительные чертежи. Очевидно, что варианты реализации, описанные ниже, являются некоторыми, но не всеми вариантами реализации настоящего изобретения. Все другие варианты реализации, полученные специалистами в свете вариантов реализации настоящего изобретения без творческих усилий, должны находиться в пределах объема охраны настоящего изобретения, определенного приложенной формулой.
[0070] Термины "первый", "второй" и "третий" используются только с целью описания и не должны пониматься как указание или значение относительной важности.
[0071] В описании настоящего изобретения следует отметить, что термины "установленный", "связанный" и "соединенный", должны пониматься широко, если явно не указано или определено иное. Например, соединение может быть фиксированным соединением или соединением, выполненным с возможностью рассоединения, или встроенным соединением, а также может быть механическим соединением или электрическим соединение, или может быть прямой или косвенной связью посредством промежуточного элемента, или внутренней связью между двумя элементами. Конкретные значения вышеуказанных терминов в настоящем изобретении могут пониматься специалистами согласно конкретным ситуациям.
[0072] Следует отметить, что признаки в вариантах реализации настоящего изобретения могут бесконфликтно объединяться друг с другом.
[0073] Как показано на ФИГ. 1-10, в настоящем изобретении обеспечен гусеничный сварочный робот, содержащий регулируемый магнитный притягивающий модуль 9, колесно-гусеничные ходовые механизмы 2, раму 1 гусеничного хода и сварочное навесное устройство 11, причем сварочное навесное устройство 11 расположено на раме 1 гусеничного хода; колесно-гусеничные ходовые механизмы 2 соответственно расположены на двух противоположных концах рамы 1 гусеничного хода для обеспечения рамы 1 гусеничного хода энергией, требуемой для гусеничного перемещения; регулируемый магнитный притягивающий модуль 9 расположен на раме 1 гусеничного хода между двумя колесно-гусеничными ходовыми механизмами 2.
[0074] В настоящем изобретении сварочный робот приводится в движение колесно-гусеничным ходовым механизмом 2, так что сварочный робот может плавно перемещаться без рельсов, и также обеспечена достаточная мощность для его перемещения. Сила магнитного поля между регулируемым магнитным притягивающим модулем и поверхностью, к которой он притягивается, регулируется расположением регулируемого магнитного притягивающего модуля 9 таким образом, что может быть достигнута оптимальная сила магнитного поля, которая не является чрезмерно большой или чрезмерно малой, так что может быть применима для различных криволинейных поверхностей.
[0075] Как показано на ФИГ. 3, в настоящем изобретении при необходимости каждый колесно-гусеничный ходовой механизм 2 содержит магнитный держатель 2-2, роликовую цепь 2-3, ведущее колесо 2-1, ведомое колесо 2-4 и первое приводное устройство 2-56. Первое приводное устройство 2-56 прочно прикреплено к раме 1 гусеничного хода, причем первое приводное устройство соединено с ведущим колесом 2-1 для приведения во вращение ведущего колеса 2-1, при этом ведущее колесо 2-1 и ведомое колесо 2-4 расположены с возможностью вращения на раме 1 гусеничного хода, причем ведущее колесо 2-1 и ведомое колесо 2-4 соединены роликовой цепью 2-3, и магнитный держатель 2-2 расположен на роликовой цепи 2-3.
[0076] Как показано на ФИГ. 4, в настоящем изобретении при необходимости рама 1 гусеничного хода содержит соединительную пластину 1-1 кузова и боковые пластины 1-5, причем первое приводное устройство 2-56 прочно установлено ниже соединительной пластины 1-1 кузова, а ведущее колесо 2-1 и ведомое колесо 2-4 расположены с возможностью вращения на соответствующей боковой пластине 1-5, и ведущее колесо 2-1 приводит во вращение ведомое колесо 2-4 посредством роликовой цепи 2-3. При необходимости соединительная пластина 1-1 имеет прямоугольную пластинчатую конструкцию, снабженную множеством овальных отверстий, проходящих сквозь соединительную пластину 1-1 в направлении, перпендикулярном поверхности соединительной пластины 1-1, и указанное множество овальных отверстий могут быть расположены в форме прямоугольного массива. Количество боковых пластин 1-5 составляет 2, причем эти 2 боковые пластины 1-5 расположены на двух боковых сторонах соединительной пластины 1-1 в направлении ширины соответственно, и при этом обе указанные боковые пластины 1-5 жестко соединены с соединительной пластиной 1-1, и, более того, поверхность каждой боковой пластины 1-5 перпендикулярна поверхности соединительной пластины 1-1. Каждый колесно-гусеничный ходовой механизм 2 содержит две роликовых цепи 2-3, два ведущих колеса 2-1, два ведомых колеса 2-4 и два первых приводных устройства 2-56, причем одно ведущее колесо 2-1, одно ведомое колесо 2-2, одна роликовая цепь 2-3 и одно первое приводное устройство 2-56 расцениваются как набор, образующий ходовой узел, и два ходовых устройства соответствуют указанным двум боковым пластинам 1-5 соответственно. После завершения установки колесно-гусеничного ходового механизма 2 эти две роликовых цепи 2-3 колесно-гусеничного ходового механизма 2 располагают параллельно с интервалом. Магнитный держатель 2-2 жестко соединен с удлиненным штифтом на роликовой цепи 2-3. При необходимости каждый ходовой узел содержит множество магнитных держателей 2-2, причем указанное множество магнитных держателей 2-2, прочно прикрепленных к одной и той же роликовой цепи 2-3, расположены с одинаковыми интервалами вдоль направления по окружности роликовой цепи 2-3. Соответственно, используются множество удлиненных штифтов, и количество указанных удлиненных штифтов находится во взаимно-однозначном соответствии с количеством магнитных держателей 2-2.
[0077] При перемещении гусеничного сварочного робота вперед роликовая цепь 2-3 тянет магнитные держатели 2-2 для перемещения, причем магнитный держатель 2-2 в переднем конце относительно переднего направления приводится в состояние, в котором он прилипает к элементу конструкции, из состояния, в котором он отделен от элемента конструкции, и одновременно магнитный держатель 2-2 в заднем конце относительно переднего направления приводится в состояние, в котором он отделен от элемента конструкции, из состояния, в котором он прилипает к элементу конструкции. Во время этого процесса весь колесно-гусеничный ходовой механизм 2 может поддерживать постоянную полную силу прилипания, вследствие чего гусеничный сварочный робот может быть надежно и устойчиво прикреплен к элементу конструкции и может перемещаться относительно указанного элемента конструкции.
[0078] При перемещении гусеничного сварочного робота назад роликовая цепь 2-3 тянет магнитные держатели 2-2 для перемещения, причем магнитный держатель 2-2 в переднем конце относительно заднего направления приводится в состояние, в котором он прилипает к элементу конструкции, из состояния, в котором он отделен от элемента конструкции, и одновременно магнитный держатель 2-2 в заднем конце относительно заднего направления приводится в состояние, в котором отделен от элемента конструкции, из состояния, в котором он прилипает к элементу конструкции. Во время этого процесса весь колесно-гусеничный ходовой механизм 2 может поддерживать постоянную полную силу прилипания, вследствие чего гусеничный сварочный робот может быть надежно и устойчиво прилипает к элементу конструкции и перемещаться относительно элемента конструкции.
[0079] В настоящем изобретении обеспечены два первых приводных устройства 2-56, которые приводят в действие указанные два ведущих колеса 2-1 двух колесно-гусеничных ходовых механизмов 2 соответственно, и два первых приводных устройства 2-56 расположены независимо друг от друга, причем каждым из первых приводных устройств 2-56 можно управлять индивидуально таким образом, что могут быть достигнуты различные скорости вращения ведущих колес 2-1 левой стороны и правой стороны колесно-гусеничных ходовых механизмов 2, и, таким образом, может быть достигнута рулевая функция гусеничного сварочного робота с использованием дифференциального принципа (принципа различной скорости).
[0080] При необходимости для обеспечения более стабильного шагающего перемещения каждого колесно-гусеничного ходового механизма 2, шагающее (перемещающееся) колесо расположено на наружной боковой стороне каждого ведущего колеса 2-1 и ведомого колеса 2-4, причем шагающее колесо может быть шиной. Ведущее колесо 2-1 прикреплено к соответствующему первому приводному устройству 2-56, и первое приводное устройство прикреплено к соответствующей боковой пластине 1-5.
[0081] В настоящем изобретении для предотвращения смещения роликовых цепей 2-3 во время передачи движения кузов обеспечен направляющими устройствами, причем каждое направляющее устройство обеспечено направляющим желобом, при этом направляющие блоки установлены на магнитных держателях 2-2 и входят в направляющие желоба соответственно во время операции передачи движения, выполняемой роликовой цепью 2-3, когда кузов перемещается вперед.
[0082] Как показано на ФИГ. 4, в настоящем изобретении каждое первое приводное устройство 2-56 содержит серводвигатель
2-6 и угловой редуктор 2-5, причем серводвигатель 2-6 соединен с угловым редуктором 2-5, при этом серводвигатель 2-6 и угловой редуктор 2-5 прикреплены к раме 1 гусеничного хода, каждое ведущее колесо 2-1 прикреплено к фланцу соответствующего углового редуктора 2-5, и каждое ведущее колесо 2-1 может быть приведено во вращение соответствующим серводвигателем 2-6.
[0083] При необходимости угловой редуктор 2-5 жестко прикреплен к соединительной пластине 1-1 кузова, серводвигатель 2-6 прикреплен к соответствующей соединительной пластине 1-1 и приводит во вращение ведущее колесо 2-1 относительно боковой пластины 1-5 посредством углового редуктора 2-5.
[0084] Как показано на ФИГ. 4, в настоящем изобретении каждая боковая пластина 1-5 рамы 1 гусеничного хода снабжена направляющим пазом 1-2, и каждое ведомое колесо 2-4 расположено с возможностью скольжения в соответствующем направляющем пазе 1-2. Второе приводное устройство расположено на боковой стенке направляющего паза 1-2 для перемещения соответствующего ведомого колеса 2-4 в направляющем пазе 1-2 для изменения расстояния между ведущим колесом 2-1 и ведомым колесом 2-4, расположенным на той же боковой пластине 1-5, и, таким образом, увеличения или уменьшения натяжения соответствующей роликовой цепи 2-3. Например, когда ведомое колесо 2-4 скользит в направляющем пазу 1-2 таким образом, что расстояние между ведомым колесом 2-4 и ведущим колесом 2-1 увеличивается, натяжение роликовой цепи 2-3 может быть увеличено; или когда ведомое колесо 2-4 скользит в направляющем пазу 1-2 таким образом, что расстояние между ведомым колесом 2-4 и ведущим колесом 2-1 уменьшается, натяжение соответствующей роликовой цепи 2-3 может быть уменьшено.
[0085] Ведомое колесо 2-4 приводится в движение вторым приводным устройством для скольжения в направляющем пазу 1-2 таким образом, что расстояние между ведомым колесом 2-4 и ведущим колесом 2-1 регулируется, и, таким образом, натяжение роликовой цепи 2-3 может быть осуществлено соответствующим механизмом 1-6 натяжения.
[0086] Как показано на ФИГ. 4, при необходимости механизм 1-6 натяжения содержит регулировочный узел 1-3 и регулировочный винт 1-4; причем ведомое колесо 2-4 расположено с возможностью вращения в регулировочном узле 1-3, причем регулировочный узел 1-3 расположен с возможностью скольжения в направляющем пазу 1-2, и один конец регулировочного винта 1-4 соединен с возможностью вращения с регулировочным узлом 1-3 и располагается в осевом направлении относительно регулировочного узла 1-3; иными словами, регулировочный винт 1-4 неподвижен относительно регулировочного узла 1-3 в осевом направлении регулировочного винта 1-4. В боковой стенке направляющего паза 1-2 в направлении скользящего регулировочного узла 1-3 обеспечено сквозное отверстие, которое может быть резьбовым отверстием, регулировочный винт 1-4 ввинчивают в указанное резьбовое отверстие, и конец регулировочного винта 1-4, дальний относительно регулировочного узла 1-3, проходит наружу из указанного резьбового отверстия. Регулировочный винт 1-4 при вращении перемещается в осевом направлении, потому что он взаимодействует с резьбовым отверстием. Поскольку регулировочный узел 1-3 и регулировочный винт 1-4 располагаются в осевом направлении относительно друг друга, регулировочный узел 1-3 перемещается в осевом направлении вместе с регулировочным винтом 1-4 для достижения перемещения ведомого колеса 2-4. Второе приводное устройство соединено с регулировочным винтом 1-4 для приведения во вращение регулировочного винта 1-4 относительно сквозного отверстия.
[0087] В настоящем изобретении при необходимости регулировочный винт 1-4 также может быть расположен таким образом, что один конец регулировочного винта соединен с помощью резьбы с регулировочным узлом 1-3, другой конец регулировочного винта проходит из боковой стенки направляющего паза 1-2, и регулировочный винт 1-4 соединен с возможностью вращения с направляющим пазом 1-2, причем регулировочный винт 1-4 и направляющий паз 1-2 располагаются относительно друг друга в осевом направлении, иными словами, регулировочный винт 1-4 неподвижен относительно направляющего паза 1-2 в осевом направлении регулировочного винта 1-4. При таком расположении, когда регулировочный винт 1-4 вращается относительно направляющего паза 1-2 вокруг своей оси, он не перемещается в осевом направлении, и поскольку регулировочный винт 1-4 с помощью резьбы соединен с регулировочным узлом 1-3, регулировочный узел 1-3 перемещается в направляющем пазе 1-2 вдоль оси регулировочного винта 1-4 с целью линейного перемещения ведомого колеса 2-4 для окончательной регулировки натяжения или ослабления роликовой цепи 2-3.
[0088] В настоящем изобретении, когда каждое ведомое колесо 2-4 перемещается в направлении от соответствующего ведущего колеса 2-1, может быть достигнута функция натяжения, и когда ведомое колесо 2-4 перемещается в направлении к соответствующему ведущему колесу 2-1, натяжение соответствующей роликовой цепи 2-3 может быть уменьшено для способствования снятию и установке роликовой цепи 2-3.
[0089] Как показано на ФИГ. 6, при необходимости, сварочное навесное устройство 11 содержит сварочный держак 10 и механизм 3 линейных колебаний сварочной головки; причем сварочный держак 10 прочно прикреплен к соединительной пластине 1-1 кузова рамы 1 гусеничного хода; механизм 3 линейных колебаний сварочной головки содержит первый линейный двигатель 3-1, первый линейный направляющий рельс 3-2, третье приводное устройство 3-4, первое зубчатое колесо 3-5 передачи и первую зубчатую рейку 3-3 передачи. Первый линейный двигатель 3-1 прочно прикреплен к сварочному держаку 10, и первый линейный направляющий рельс 3-2 соединен с первым линейным двигателем 3-1; первое зубчатое колесо 3-5 передачи установлено с возможностью вращения на первом линейном направляющем рельсе 3-2, первая зубчатая рейка 3-3 передачи соединена с возможностью скольжения с первым линейным направляющим рельсом 3-2, и первое зубчатое колесо 3-5 передачи находится в зацеплении с первой зубчатой рейкой 3-3 передачи. Третье приводное устройство 3-4 соединено с первым зубчатым колесом 3-5 передачи и выполнено с возможностью приведения во вращение первого зубчатого колеса 3-5 передачи для дополнительного возвратно-поступательно скольжения первой зубчатой рейки 3-3 передачи относительно первого линейного направляющего рельса 3-2.
[0090] При необходимости первый линейный двигатель 3-1 может вызывать линейное перемещение первого линейного направляющего рельса 3-2 на сварочном держаке 10 в направлении x; иными словами, первый линейный двигатель 3-1, первый линейный направляющий рельс 3-2 и сварочный держак 10 вместе образуют передающую винтовую конструкцию; первое зубчатое колесо 3-5 передачи, расположенное с возможностью вращения на первом линейном направляющем рельсе 3-2, взаимодействует с первой зубчатой рейкой 3-3 передачи, расположенной с возможностью скольжения на первом линейном направляющем рельсе 3-2, для перемещения сварочной головки 12, расположенной на первой зубчатой рейке 3-3 передачи, в верхнем и нижнем направлении z, так что может быть достигнута регулировка положения сварочной головки 12 в направлении x и направлении z. Кроме того, колесно-гусеничные ходовые механизмы 2 могут перемещаться вдоль направления y, таким образом достигается регулировка положения сварочной головки 12 в направлении y, и, наконец, достигается трехмерная регулировка положения сварочной головки 12.
[0091] При необходимости направление x задано как параллельное поверхности, прилипание к которой необходимо обеспечить, и перпендикулярное направлению шагающего перемещения колесно-гусеничного ходового механизма 2, направление y задано как направление шагающего перемещения колесно-гусеничного ходового механизма 2, и направление z задано как направление, перпендикулярное поверхности, прилипание к которой необходимо обеспечить.
[0092] Механизм 3 линейных колебаний сварочной головки выполнен таким образом, что сварочная головка 12 может быть точно выровнена с участком сварки, когда гусеничный сварочный робот выполняет операцию соединения сваркой, и, таким образом, качество соединения сваркой может быть улучшено.
[0093] В настоящем изобретении третье приводное устройство 3-4 может быть ручкой или поворотным диском, причем указанные ручка или поворотный диск могут вращаться вручную для приведения во вращение первого зубчатого колеса 3-5 передачи и скольжения первой зубчатой рейки 3-3 передачи, взаимодействующей с первым зубчатым колесом 3-5 передачи, так что наконец может быть достигнута регулировка положения сварочной головки 12 в направлении y, иными словами, в конечном счете достигается регулировка высоты сварочной головки 12.
[0094] Следует отметить, что третье приводное устройство 3-4 также может быть двигателем, который соединен с контроллером для осуществления автоматической регулировки высоты сварочной головки 12, или двигателем управляют дистанционно, используя контроллер для дистанционной регулировки высоты сварочной головки 12.
[0095] Для обеспечения более точного расположения сварочной головки 12 во время операции соединения сваркой и приспосабливаемости к различным процессам в настоящем изобретении, как изображено на ФИГ. 8, при необходимости сварочное навесное устройство 11 дополнительно содержит механизм 6 зажима и угловых колебаний сварочной головки, благодаря которому сварочная головка 12 может вращаться вокруг оси, параллельной направлению y, для регулировки угла сварки сварочной головки 12.
[0096] При необходимости в настоящем изобретении механизм 6 зажима и угловых колебаний сварочной головки содержит генератор 6-1 угловых колебаний, фиксирующий механизм 6-2 и зажим 6-3. Генератор 6-1 угловых колебаний соединен с зажимом 6-3 для приведения в состояние качания или во вращение сварочной головки, расположенной в зажиме 6-3; фиксирующий механизм 6-2 расположен на генераторе 6-1 угловых колебаний и жестко соединен с первой зубчатой рейкой 3-3 передачи.
[0097] При необходимости генератор 6-1 угловых колебаний содержит шаговый двигатель и поворотную платформу с функцией замедления, причем поворотная платформа соединена с шаговым двигателем, зажим 6-3 соединен с поворотной платформой и выполнен с возможностью зажатия и фиксации сварочной головки 12, фиксирующий механизм 6-2 может жестко соединять шаговый двигатель с первой зубчатой рейкой 3-3 передачи, и шаговый двигатель приводит во вращение поворотную платформу для перемещения сварочной головки 12, расположенной в зажиме 6-3, так что могут быть достигнуты высокоточные вращение или маятниковое перемещение сварочной головки 12. При использовании после фиксации сварочной головки 12 зажимом 6-3 шаговый двигатель может быть активирован для приведения во вращение сварочной головки 12 или в состояние качания в пределах заданного диапазона углов, а сварочная головка 12 может быть поддержана в заданном положении для обеспечения возможности выполнения операции соединения сваркой.
[0098] Для обеспечения возможности точного поиска сварочной головкой 12 места сварки и обеспечения качества сварного шва в настоящем изобретении, как изображено на ФИГ. 5, при необходимости сварочный держак 10 оснащен механизмом 4 линейных колебаний для лазерного слежения и модулем 5 лазерного слежения. Механизм 4 линейных колебаний для лазерного слежения может регулировать положение модуля 5 лазерного слежения в направлении x и в направлении z, так что модуль 5 лазерного слежения может достигать оптимального положения; модуль лазерного слежения 5 сначала может собирать и анализировать данные о месте сварки для точно выяснения положения сварного шва, и затем положение и угол сварочной головки 12 точно регулируются колесно-гусеничными ходовыми механизмами 2 вместе с механизмом 3 линейных колебаний сварочной головки и механизмом 6 зажима и угловых колебаний сварочной головки, так что сварочная головка 12 согласована с местом сварки, и, таким образом, обеспечивается качество соединения сваркой.
[0099] Как изображено на ФИГ. 6, при необходимости в настоящем изобретении механизм 4 линейных колебаний для лазерного слежения и механизм 3 линейных колебаний сварочной головки расположены на двух противоположных боковых сторонах сварочного держака 10. Механизм 4 линейных колебаний для лазерного слежения содержит второй линейный двигатель 4-1, второй линейный направляющий рельс 4-2, четвертое приводное устройство 4-4, второе зубчатое колесо 4-5 передачи и вторую зубчатую рейку 4-3 передачи. Второй линейный двигатель 4-1 прочно прикреплен к сварочному держаку 10, причем второй линейный двигатель и первый линейный двигатель 3-1 расположены на двух противоположных боковых сторонах сварочного держака 10, и второй линейный направляющий рельс 4-2 соединен со вторым линейным двигателем 4-1; второе зубчатое колесо 4-5 передачи расположено с возможностью вращения на втором линейном направляющем рельсе 4-2, вторая зубчатая рейка 4-3 передачи взаимодействует с возможностью скольжения со вторым линейным направляющим рельсом 4-2, и второе зубчатое колесо 4-5 передачи находится в зацеплении со второй зубчатой рейкой 4-3 передачи; четвертое приводное устройство 4-4 соединено со вторым зубчатым колесом 4-5 передачи для приведения во вращение второго зубчатого колеса 4-5 передачи для обеспечения линейного возвратно-поступательного перемещения второй зубчатой рейки 4-3 передачи.
[00100] При необходимости второй линейный двигатель 4-1 может вызывать линейное перемещение второго линейного направляющего рельса 4-2 на сварочном держаке 10 в направлении x, иными словами, второй линейный двигатель 4-1, сварочный держак 10 и второй линейный направляющий рельс 4-2 все вместе образуют передающую винтовую конструкцию. Второе зубчатое колесо 4-5 передачи, расположенное с возможностью вращения на втором линейном направляющем рельсе 4-2, взаимодействует со второй зубчатой рейкой 4-3 передачи, расположенной с возможностью скольжения на втором линейном направляющем рельсе 4-2, для перемещения модуля 5 лазерного слежения, расположенного на второй зубчатой рейке 4-3 передачи, вверх и вниз в направлении z, так что может быть достигнута регулировка положения модуля 5 лазерного слежения в направлении x и направлении z, и дополнительно достигается регулировка модуля 5 лазерного слежения в направлении y путем перемещения колесно-гусеничных ходовых механизмов 2, так что в конечном счете достигается регулировка положения сварочной головки 12 в трех направлениях.
[00101] При необходимости направление x задано как параллельное поверхности, прилипание к которой необходимо обеспечить, и перпендикулярное направлению шагающего перемещения колесно-гусеничного ходового механизма 2, направление y задано как направление шагающего перемещения колесно-гусеничного ходового механизма 2, и направление z задано как направление, перпендикулярное поверхности, прилипание к которой необходимо обеспечить.
[00102] Механизм 4 линейных колебаний для лазерного слежения выполнен таким образом, что может быть точно найдено место сварки, и может быть обеспечено точное согласование сварочной головки 12 с местом сварки, когда гусеничный сварочный робот выполняет операцию соединения сваркой.
[00103] В настоящем изобретении четвертое приводное устройство 4-4 может содержать ручку или поворотный диск, соединенные со вторым зубчатым колесом 4-5 передачи, причем указанные ручка или поворотный диск выполнены с возможностью вращения вручную для приведения во вращение второго зубчатого колеса 4-5 передачи для принуждения второй зубчатой рейки 4-3 передачи, взаимодействующей со вторым зубчатым колесом 4-5 передачи, совершать возвратно-поступательное скольжение относительно второго линейного направляющего рельса 4-2, так что в конечном счете достигается регулировка высоты модуля 5 лазерного слежения.
[00104] Следует отметить, что при необходимости четвертое приводное устройство 4-4 может содержать двигатель, причем выходной вал двигателя соединен со вторым зубчатым колесом 4-5 передачи, и указанный двигатель соединен с возможностью передачи сигналов с контроллером для достижения автоматической регулировки высоты модуля 5 лазерного слежения, или двигателем управляют дистанционно с использованием контроллера для достижения дистанционной регулировки высоты модуля 5 лазерного слежения.
[00105] Как изображено на ФИГ. 7, при необходимости в настоящем изобретении модуль 5 лазерного слежения содержит камеру 5-4, лазерный датчик 5-3, установочную раму 5-1 и мультифильтр 5-2. Камера 5-4, лазерный датчик 5-3 и мультифильтр 5-2 расположены на установочной раме 5-1; и установочная рама 5-1 прочно прикреплена к второй зубчатой рейке 4-3 передачи.
[00106] При необходимости лазерный датчик 5-3 и камера 5-4 расположены с возможностью вращения на установочной раме 5-1, и может быть достигнута регулировка вращения лазерного датчика 5-3 и камеры 5-4 для регулировки углов наблюдения лазерного датчика 5-3 и камеры 5-4.
[00107] Мультифильтр 5-2 содержит множество комбинированных фильтров различных типов, которые могут эффективно отфильтровывать помехи от сопутствующих источников света, таких как дуговая лампа.
[00108] В настоящем изобретении благодаря применению лазерного датчика 5-3 и камеры 5-4 реализована усовершенствованная система распознавания и отслеживания сварного шва, а также управления сваркой, так что может быть получена информация о геометрии и местоположении сварного шва, и, таким образом, может быть обеспечено качество соединения сваркой. Сварной шов может быть отслежен с точностью до ±0,3 мм с точностью по высоте до ±0,5 мм в неограниченном диапазоне. Время на вспомогательные операции соединения сваркой может быть значительно сокращено, и экономическая эффективность производства повышена по сравнению со сварочным роботом, перемещающимся по уложенным рельсам.
[00109] Как изображено на ФИГ. 9 и 13, при необходимости сварочный держак 10 дополнительно обеспечен ветрозащитным устройством 7; причем ветрозащитное устройство 7 содержит крепежный кронштейн 13 и ветрозащитный экран 7-1, причем крепежный кронштейн 13 имеет один конец, соединенный со сварочным держаком 10, и другой конец, соединенный с ветрозащитным экраном 7-1; крепежный кронштейн 13 содержит выдвижную пластину 7-4 поступательного перемещения, снабженную направляющими сквозными пазами 7-3, проходящими в левом и правом направлениях, и направляющими сквозными пазами 7-11, проходящими в переднем и заднем направлениях, а ветрозащитный экран 7-1 снабжен направляющими сквозными пазами 7-2, проходящими в верхнем и нижнем направлениях, так что положение ветрозащитного экрана 7-1 может регулироваться в трех направлениях, и, кроме того, ветрозащитный экран 7-1 может быть зафиксирован после завершения регулировки его положения, и, таким образом, ветрозащитный экран 7-1 поддерживается в заданном положении.
[00110] В настоящем изобретении при необходимости ветрозащитный экран 7-1 расположен снаружи сварочной головки 12 подобно кожуху и жестко соединен со сварочным роботом посредством крепежного кронштейна 13. При необходимости регулировки положения сварочной головки 12 для различных сварочных операций во время выполнения сварочным роботом операции соединения сваркой регулировка положения ветрозащитного экрана 7-1 может быть достигнута посредством крепежного кронштейна 13 на ветрозащитном экране 7-1 таким образом, что положение ветрозащитного экрана 7-1 согласовано с положением сварочной головки 12 для обеспечения ветрозащитных характеристик ветрозащитного экрана 7-1.
[00111] Как изображено на ФИГ. 9 и 12, в настоящем изобретении при необходимости крепежный кронштейн 13 содержит неподвижную опорную пластину 7-5, неподвижную соединительную пластину 7-14 и выдвижную пластину 7-4 поступательного перемещения, причем неподвижная опорная пластина 7-5 снабжена множеством крепежных отверстий 7-51, количество которых в настоящем изобретении равно четырем, и неподвижная опорная пластина 7-5 прикреплена к соединительной пластине 1-1 кузова сварочного робота крепежными болтами, проходящими через соответствующие крепежные отверстия. Неподвижная соединительная пластина 7-14 жестко соединена с боковой поверхностью или плоской поверхностью неподвижной опорной пластины 7-5, и указанное жесткое соединение может быть выполнено сваркой, заклепками, соединительными болтами, или указанные элементы могут быть выполнены за одно целое, или могут быть соединены подобным способом для достижения жесткого соединения неподвижной опорной пластины 7-5 и неподвижной соединительной пластины 7-14. Выдвижная пластина 7-4 поступательного перемещения соединена с неподвижной соединительной пластиной 7-14. Выдвижная пластина 7-4 поступательного перемещения и неподвижная соединительная пластина 7-14 могут быть жестко соединены посредством крепежных болтов. Во время установки крепежные болты проходят как через первые соединительные отверстия 7-141 в неподвижной соединительной пластине 7-14, так и через направляющие сквозные пазы 7-11, проходящие в переднем и заднем направлениях, в выдвижной пластине 7-4 поступательного перемещения, и гайки навинчены на крепежные болты для достижения жесткого соединения неподвижной соединительной пластины 7-14 с выдвижной пластиной 7-4 поступательного перемещения. Направляющие сквозные пазы 7-11, проходящие в переднем и заднем направлениях, выполнены таким образом, что положения соединения между неподвижной соединительной пластиной 7-14 и выдвижной пластиной 7-4 поступательного перемещения могут изменяться и регулироваться в направлении прохождения направляющих сквозных пазов 7-11, проходящих в переднем и заднем направлениях, таким образом, что ветрозащитный экран 7-1 может быть зафиксирован в относительно подходящем положении в переднем и заднем направлениях. Следует отметить, что количество направляющих сквозных пазов 7-11, проходящих в переднем и заднем направлениях, задают по мере надобности. Например, в настоящем изобретении количество направляющих сквозных пазов 7-11, проходящих в переднем и заднем направлениях, составляет четыре, и эти четыре направляющих сквозных паза 7-11, проходящих в переднем и заднем направлениях, расположены прямоугольником. Соответственно, количество первых соединительных отверстий 7-141, выполненных в неподвижной соединительной пластине 7-14, задают по мере надобности, для обеспечения по меньшей мере одного первого соединительного отверстия 7-141, соответствующего одному направляющему сквозному пазу 7-11, проходящему в переднем и заднем направлениях. При необходимости в настоящем изобретении количество первых соединительных отверстий 7-141 составляет восемь, каждые два первых соединительных отверстия 7-141 образуют одну группу, и два первых соединительных отверстия 7-141 из одной и той же группы взаимодействуют с одним соответствующим направляющим сквозным пазом 7-11, проходящим в переднем и заднем направлениях.
[00112] В настоящем изобретении при необходимости выдвижная пластина 7-4 поступательного перемещения имеет изгиб, иными словами, выдвижная пластина 7-4 поступательного перемещения содержит первую часть 7-41 пластины и вторую часть 7-42 пластины, которые соединены друг с другом и расположены перпендикулярно друг другу. Первая часть 7-41 пластины и вторая часть 7-42 пластины могут быть выполнены за одно целое. Направляющие сквозные пазы 7-11, проходящие в переднем и заднем направлениях, выполнены во второй части 7-42 пластины, а направляющие сквозные пазы 7-3, проходящие влево и вправо, выполнены в первой части 7-41 пластины. Ветрозащитный экран 7-1 имеет направляющие сквозные пазы 7-2, проходящие в верхнем и нижнем направлениях. Крепежные болты проходят через направляющие сквозные пазы 7-3, проходящие в левом и правом направлениях, и направляющие сквозные пазы 7-2, проходящие в верхнем и нижнем направлениях, и затем затягиваются гайками для достижения прочного соединения выдвижной пластины 7-4 поступательного перемещения с ветрозащитным экраном 7-1. Направляющие сквозные пазы 7-3, проходящие в левом и правом направлениях, обеспечены таким образом, что места соединений между выдвижной пластиной 7-4 поступательного перемещения и ветрозащитным экраном 7-1 могут быть перемещены и отрегулированы согласно направляющим сквозным пазам 7-3, проходящим в левом и правом направлениях, так что ветрозащитный экран 7-1 может быть зафиксирован в подходящем положении относительно левого и правого направлений. Направляющие сквозные пазы 7-2, проходящие в верхнем и нижнем направлениях, обеспечены таким образом, что места соединений между выдвижной пластиной 7-4 поступательного перемещения и ветрозащитным экраном 7-1 могут быть изменены и отрегулированы согласно направляющим сквозным пазам 7-2, проходящим в верхнем и нижнем направлениях, таким образом, что ветрозащитный экран 7-1 может быть зафиксирован в подходящем положении относительно верхнего и нижнего направлений. Следует отметить, что количество направляющих сквозных пазов 7-3, проходящих в левом и правом направлениях, обеспеченных в первой части 7-41 пластины, может составлять четыре, и эти четыре направляющих сквозных паза 7-3, проходящих в левом и правом направлениях, расположены прямоугольником. Количество направляющих сквозных пазов 7-2, проходящих в верхнем и нижнем направлениях, обеспеченных в ветрозащитном экране 7-1, может составлять четыре, и эти четыре направляющих сквозных паза 7-2, проходящих в верхнем и нижнем направлениях, расположены прямоугольником.
[00113] В настоящем изобретении при необходимости по меньшей мере два направляющих сквозных паза 7-11, проходящих в переднем и заднем направлениях, по меньшей мере два направляющих сквозных паза 7-3, проходящих в левом и правом направлениях, и по меньшей мере два направляющих сквозных паза 7-2, проходящих в верхнем и нижнем направлениях, расположены соответственно симметрично для обеспечения прочного соединения между выдвижной пластиной 7-4 поступательного перемещения и неподвижной соединительной пластиной 7-14 и прочного соединения между выдвижной пластиной 7-4 поступательного перемещения и ветрозащитным экраном 7-1.
[00114] В настоящем изобретении при необходимости нижний край ветрозащитного экрана 7-1 оборудован гибкой защитной юбкой, которая проходит вдоль окружности ветрозащитного экрана 7-1 и является кольцевой. Гибкая защитная юбка выполнена таким образом, чтобы избежать жесткого столкновения между ветрозащитным экраном 7-1 и местом сварки при тряске сварочного робота во время его перемещения, что не только защищает ветрозащитный экран 7-1, но также и защищает место сварки, и промежуток между ветрозащитным устройством 7 и свариваемыми деталями также может быть закрыт.
[00115] При необходимости в настоящем изобретении гибкая защитная юбка прикреплена к ветрозащитному экрану 7-1 болтами, так что указанная гибкая защитная юбка в целях удобства может быть отделена и заменена в случае ее повреждения.
[00116] Следует отметить, что в настоящем изобретении гибкая защитная юбка и ветрозащитный экран 7-1 прикреплены болтами, но гибкая защитная юбка и ветрозащитный экран 7-1 не ограничиваются креплением болтами и также могут быть скреплены другим способом, например, с использованием заклепок или клея, или тому подобного средства, иными словами, любым средством, обеспечивающим крепление гибкой защитной юбки к нижней части ветрозащитного экрана 7-1.
[00117] При необходимости в настоящем изобретении нижняя прессованная полоса (полосы) 7-13 расположена на гибкой защитной юбке, причем нижняя прессованная полоса 7-13 и гибкая защитная юбка прикреплены к нижней части ветрозащитного экрана 7-1 болтами, так что может быть обеспечено прилегание гибкой защитной юбки к нижней части ветрозащитного экрана 7-1 с целью улучшения укрываемости гибкой защитной юбки для защиты ветрозащитного экрана 7-1.
[00118] В настоящем изобретении при необходимости материалом гибкой защитной юбки является стойкий к повышенной температуре гибкий материал или полоса из металлической щетки.
[00119] Поскольку сварочная головка 12 перемещается в осевом направлении или горизонтально во время соединения сваркой, и ветрозащитный экран 7-1 закреплен и неподвижен, необходимо использовать мягкое соединение в местах соединения между ветрозащитным экраном 7-1 и сварочной головкой 12, чтобы ветрозащитный экран 7-1 не мешал перемещению сварочной головки 12 с одновременным обеспечением ветрозащитных характеристик ветрозащитного экрана 7-1.
[00120] Для обеспечения вышеуказанных функций в настоящем изобретении при необходимости верхняя часть ветрозащитного экрана 7-1 снабжена гибкой защитной крышкой для мягкого соединения между ветрозащитным экраном и сварочной головкой 12.
[00121] При необходимости гибкая защитная крышка выполнена из гибкого стойкого к повышенной температуре материала и жестко соединена с краями верхней части ветрозащитного экрана 7-1 посредством болтов и верхней прессованной полосы (полос) 7-12, а средняя часть гибкой защитной крышки снабжена отверстием для прохода через нее сварочной головки 12.
[00122] При необходимости гибкая защитная крышка соединена с верхней частью сварочной головки 12 с использованием зажимного приспособления, т.е. гибкая защитная крышка охватывает сварочную головку 12 и снаружи зафиксирована зажимным приспособлением.
[00123] Для облегчения своевременного получения и оценки состояния процесса сварки, происходящего под ветрозащитным экраном 7-1, согласно настоящему изобретению при необходимости ветрозащитный экран 7-1 снабжен смотровым окном 14, через которое можно наблюдать состояние сварочной головки 12, расположенной внутри ветрозащитного устройства 7, во время процесса соединения сваркой.
[00124] Смотровое окно 14 включает прозрачное окно, выполненное в виде стойкой к повышенной температуре линзы, в результате чего указанное прозрачное окно меньше портится от высокой температурой во время операции соединения сваркой, и срок службы прозрачного окна является продолжительным.
[00125] При необходимости в настоящем изобретении смотровое окно 14 соединено с возможностью вращения с ветрозащитным экраном 7-1.
[00126] Смотровое окно 14 вращается таким образом, что состояние процесса в ветрозащитном экране 7-1 может быть всесторонне понято и зарегистрировано с возможностью своевременного распознавания и устранения аварийной ситуации.
[00127] При необходимости в настоящем изобретении смотровое окно 14 соединено с возможностью вращения с ветрозащитным экраном 7-1 посредством шарового соединения.
[00128] Иными словами, смотровое окно 14 оснащено шаровым шарниром 7-8, причем указанный шаровой шарнир 7-8 снабжен сквозным смотровым отверстием, сообщающимся со смотровым окном 14 и ветрозащитным экраном 7-1; ветрозащитный экран 7-1 снабжен неподвижным фланцем 7-6, и шаровой шарнир 7-8 установлен на неподвижном фланце 7-6 посредством подвижного фланца 7-7.
[00129] Иными словами, после установки неподвижного фланца 7-6 на ветрозащитном экране 7-1 и размещения шарового шарнира 7-8 в неподвижном фланце 7-6 шаровой шарнир 7-8 прикрепляют к неподвижному фланцу 7-6 посредством подвижного фланца 7-7, и шаровой шарнир 7-8 частично заключен между неподвижным фланцем 7-6 и подвижным фланцем 7-7 таким образом, что не может быть отделен от неподвижного фланца 7-6 или подвижного фланца 7-7, и может только вращаться между неподвижным фланцем 7-6 и подвижным фланцем 7-7.
[00130] Шаровой шарнир 7-8 снабжен смотровым сквозным отверстием, имеющим один конец, сообщающийся со смотровым окном 14, и другой конец, сообщающийся с внутренней частью ветрозащитного экрана 7-1, так что шаровой шарнир 7-8 не препятствует наблюдению за внутренней частью ветрозащитного экрана 7-1 через смотровое окно.
[00131] Следует отметить, что в настоящем изобретении соединение между смотровым окном 14 и ветрозащитным экраном 7-1 является шаровым соединением, но не ограничивается только шаровым соединением и также может быть другим соединением, выполненным с возможностью вращения, при условии, что угол наблюдения через указанное смотровое окно 14 может быть изменен посредством выполненного с возможностью вращения соединения для увеличения обзорности через смотровое окно 14.
[00132] При необходимости смотровое окно 14 содержит основное смотровое окно 7-9 и вспомогательное смотровое окно 7-10, причем основное смотровое окно 7-9 и вспомогательное смотровое окно 7-10 расположены под определенным углом относительно ветрозащитного экрана 7-1 соответственно. Следует отметить, что как основное смотровое окно 7-9, так и вспомогательное смотровое окно 7-10 могут быть соединены с возможностью вращения с ветрозащитным экраном 7-1 посредством шаровой конструкции.
[00133] Наблюдение за состоянием процесса внутри ветрозащитного экрана 7-1 через основное смотровое окно 7-9 и вспомогательное смотровое окно 7-10 может увеличить обзорность, что способствует более исчерпывающему пониманию состояния процесса внутри ветрозащитного экрана 7-1.
[00134] Между первостепенным смотровым окном 7-9 и ветрозащитным экраном 7-1, а также между вторичным смотровым окном 7-10 и ветрозащитным экраном 7-1 обеспечен определенный угол, так что повреждение стойкой к повышенной температуре линзы, вызванное всплеском шлака, вылетающего из сварочной головки 12 во время процесса соединения сваркой, может быть эффективно уменьшено.
[00135] При необходимости угол между основным смотровым окном 7-9 и ветрозащитным экраном 7-1 находится в диапазоне от 30 до 60°, и согласно настоящему варианту реализации угол между основным смотровым окном 7-9 и ветрозащитным экраном 7-1 составляет 45°; угол между вспомогательным смотровым окном 7-9 и ветрозащитным экраном 7-1 находится в диапазоне от 30 до 60°, и согласно настоящему варианту реализации угол между вспомогательным смотровым окном 7-9 и ветрозащитным экраном 7-1 составляет 45°.
[00136] В настоящем изобретении ветрозащитный экран 7-1 выполнен из стойкого к повышенной температуре легкого сплава.
[00137] Как изображено на ФИГ. 5, 14 и 15, при необходимости регулируемый магнитный притягивающий модуль 9 содержит магнитный модуль 15 и подъемный регулировочный модуль 16, причем подъемный регулировочный модуль 16 соединен с магнитным модулем 15 для управления подъемом и спуском магнитного модуля 15; подъемный регулировочный модуль 16 содержит множество независимо управляемых подъемных механизмов, которые регулируются по отдельности для изменения угла и/или промежутка между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить.
[00138] В настоящем изобретении гусеничный сварочный робот обеспечен регулируемым магнитным притягивающим модулем 9 для медленного перемещения на плоской поверхности и на криволинейной поверхности, имеющей диаметр не больше чем 3 метра, и имеет хорошую адаптируемость к производственным условиям.
[00139] В настоящем изобретении при необходимости магнитный модуль 15 обеспечен подъемным регулировочным модулем 16, и высота магнитного модуля 15 регулируется подъемным регулировочным модулем 16 для осуществления регулировки промежутка между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить.
[00140] Такое расположение обеспечивает возможность регулировки силы магнитного поля магнитным модулем 15, взаимодействующим с поверхностью, прилипание к которой необходимо обеспечить, когда поверхностью, прилипание к которой необходимо обеспечить? является криволинейная поверхность, таким образом обеспечивая стабильность силы магнитного поля и также обеспечивая устойчивость магнитного притягивающего устройства на криволинейной поверхности.
[00141] В настоящем изобретении подъемный регулировочный модуль 16 содержит по меньшей мере два независимо управляемых подъемных механизма. Высоты соответствующих положений магнитного модуля 15 соответственно регулируются путем использования различных высот, увеличиваемых или уменьшаемых соответствующими подъемными механизмами при независимом управлении указанными подъемными механизмами по отдельности, в результате чего достигается регулировка угла между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить.
[00142] При необходимости обеспечены два подъемных механизма, расположенные на двух боковых сторонах магнитного модуля 15 соответственно.
[00143] При использовании ролики или гусеничные траки для шагающего перемещения расположены на двух противоположных боковых сторонах магнитного модуля 15, указанные два подъемных механизма расположены на двух противоположных боковых сторонах магнитного модуля 15, и указанные два подъемных механизма расположены в том же направлении, что и ролики или гусеничные траки. Указанными подъемными механизмами магнитного модуля 15 управляют таким образом, что два конца магнитного модуля 15 имеют различные высоты, в результате чего угол между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить, изменяется, и, таким образом, может быть обеспечена достаточная сила магнитного поля и сила притяжения, с которой сварочный робот удерживается на различных наклонных или искривленных поверхностях во время своего перемещения.
[00144] При необходимости подъемный регулировочный модуль 16, в частности, выполнен в форме линейного приводного устройства.
[00145] Подъемный регулировочный модуль 16 может осуществлять равномерную регулировку подъема и может непрерывно регулировать высоту магнитного модуля 15 с обеспечением своей адаптируемости к любой криволинейной поверхности и наклону.
[00146] Линейное приводное устройство может быть выполнено в нескольких формах. В настоящем изобретении при необходимости линейное приводное устройство может быть обеспечено в форме зубчато-винтового механизма, гидравлического передаточного механизма, реечно-зубчатого передаточного механизма, винтового передаточного механизма или тому подобное.
[00147] При использовании зубчато-винтового механизма в качестве линейного приводного устройства магнитный модуль 15 соединен с червяком и зубчатое колесо вращают для приведения в линейное перемещение червяка, в результате чего происходит подъем или спуск магнитного модуля 15, обеспечивая регулировку высоты магнитного модуля 15.
[00148] При использовании гидравлического передаточного механизма в качестве линейного приводного устройства магнитный модуль 15 соединен с штоком гидросистемы. Когда шток гидросистемы телескопически перемещается, магнитный модуль 15 поднимается или опускается, в результате чего обеспечивается регулировка высоты магнитного модуля 15.
[00149] При использовании реечно-зубчатого передаточного механизма в качестве линейного приводного устройства зубчатая рейка передачи соединена с магнитным модулем 15, и зубчатое колесо взаимодействует с зубчатой рейкой передачи. При вращении зубчатого колеса зубчатая рейка передачи выполняет линейное перемещение, вызывая подъем или спуск магнитного модуля 15, в результате чего обеспечивается регулировка высоты магнитного модуля 15.
[00150] При использовании винтового передаточного механизма в качестве линейного приводного устройства снабженный резьбой стержень соединен посредством резьбы с магнитным модулем 15, и снабженный резьбой стержень прикреплен к магнитному модулю 15 вдоль своей окружности. При вращении снабженного резьбой стержня магнитный модуль 15 линейно перемещается вдоль осевого направления указанного снабженного резьбой стержня, вследствие чего магнитный модуль 15 поднимается или опускается, и, таким образом, осуществляется регулировка высоты магнитного модуля 15.
[00151] Следует отметить, что в настоящем изобретении линейное приводное устройство включает любой один или более из нескольких описанных выше вариантов реализации, которые могут быть произвольно объединены друг с другом.
[00152] Также следует отметить, что линейное приводное устройство может быть выполнено в различных описанных выше формах, но не ограничивается описанными выше формами и также может выполнено в других вариантах реализации линейного перемещения, таких как кривошипно-ползунный механизм или тому подобное, иными словами, при условии, что посредством указанного линейного приводного устройства может быть достигнут линейный подъем или спуск магнитного модуля 15.
[00153] Как изображено на ФИГ. 14, в настоящем изобретении при необходимости каждый подъемный механизм выполнен в форме снабженного резьбой подъемного регулировочного механизма, который содержит опорную раму 16-1, подъемный винт 9-6 и регулировочную гайку 16-2. Регулировочная гайка 16-2 расположена с возможностью вращения на опорной раме 16-1, прикреплена к опорной раме 16-1 в своем осевом направлении и посредством резьбы соединена с подъемным винтом 9-6; и подъемный винт 9-6 соединяется с возможностью перемещения с магнитным модулем 15.
[00154] Каждый подъемный механизм регулируется посредством снабженного резьбой винта, и подъемный винт 9-6 находится в подвижном соединении с магнитным модулем 15. Подвижное соединение может быть вращательным соединением или может быть универсальным соединением при условии обеспечения регулировки высоты и угла магнитного модуля 15.
[00155] В настоящем изобретении при необходимости две монтажных проушины 9-7 расположены на двух концах магнитного модуля 15, причем указанные две монтажные проушины 9-7 расположены параллельно с промежутком между ними, каждая монтажная проушина 9-7 снабжена отверстием 9-11 для вращающейся детали, каждый подъемный винт 9-6 соединен с вращающимся валом 9-8, два конца вращающегося вала 9-8 вставлены в соответствующие отверстия 9-11 для вращающейся детали соответственно, и вращающийся вал 9-8 взаимодействует с возможностью вращения с отверстием 9-11 для вращающейся детали, таким образом обеспечивая вращательное соединение между вращающимся валом 9-8 и соответствующей монтажной проушиной 9-7.
[00156] В настоящем изобретении регулировочная гайка 16-2 расположена с возможностью вращения на опорной раме 16-1 и без возможности перемещения в осевом направлении относительно опорной рамы 16-1, что не только позволяет избежать отсоединения регулировочной гайки 16-2, но также обеспечивает функцию фиксации регулировочной гайки 16-2 в осевом направлении. Регулировочная гайка 16-2 посредством резьбы соединена с подъемным винтом 9-6. Подъемный винт 9-6 выполнен с возможностью перемещения в осевом направлении при вращении регулировочной гайки 16-2 для подъема или спуска одного конца магнитного модуля 15, соединенного с возможностью перемещения с подъемным винтом 9-6, обеспечивая таким образом регулировку высоты одного конца магнитного модуля 15.
[00157] Когда два противоположных конца магнитного модуля 15 регулируются в одном и том же направлении на одной и той же высоте, между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить, изменяется только промежуток; и когда два противоположных конца магнитного модуля 15 регулируются в различных направлениях и/или регулируются на различных высотах, изменяется угол между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить.
[00158] Когда промежуток или угол между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить, изменяются, сила прилипания между магнитным модулем и поверхностью, прилипание к которой необходимо обеспечить, изменяется, так что магнитный модуль 15 может быть выполнен с возможностью адаптирования к различным криволинейным поверхностям с обеспечением достаточной силы прилипания между магнитным модулем 15 и поверхностью, прилипание к которой необходимо обеспечить.
[00159] В настоящем изобретении при необходимости опорная рама 16-1 содержит желобчатый корпус 9-4 и закрывающую пластину 9-3. Желобчатый корпус 9-4 снабжен ограничительным желобом 9-41, причем ограничительный желоб 9-41 является цилиндрическим. Регулировочная гайка 16-2 снабжена кольцевым ограничительным выступом 16-21, причем кольцевой ограничительный выступ 16-21 расположен в одном конце регулировочной гайки 16-2, при этом кольцевой ограничительный выступ 16-21 является цилиндрическим и выступает наружу в радиальном направлении регулировочной гайки 16-2 из ее наружной периферийной поверхности, таким образом, кольцевой ограничительный выступ 16-21 является коаксиальным с регулировочной гайкой 16-2. При необходимости кольцевой ограничительный выступ 16-21 согласован с ограничительным желобом 9-41. После вставки одного конца регулировочной гайки 16-2, имеющей кольцевой ограничительный выступ 16-21, в ограничительный желоб 9-41, указанный кольцевой ограничительный выступ 16-21 взаимодействует с возможностью вращения с ограничительным желобом 9-41, и концевая поверхность кольцевого ограничительного выступа 16-21, которая является дальней относительно ограничительного желоба 9-41, по существу выровнена с концевой поверхностью ограничительного желоба 9-41, где расположено указанное желобчатое отверстие. После размещения регулировочной гайки 16-2 в ограничительном желобе желобчатого корпуса 9-4 закрывающая пластина 9-3 может быть прочно установлена на желобчатом корпусе 9-4 таким образом, что регулировочная гайка 16-2 проходит через закрывающую пластину 9-3, причем указанная закрывающая пластина 9-3 может блокировать отверстие ограничительного желоба 9-41 таким образом, что кольцевой ограничительный выступ 16-21 не выходит из взаимодействия с ограничительным желобом 9-41 через закрывающую пластину, в результате чего регулировочная гайка 16-2 может быть зафиксирована в желобчатом корпусе 9-4 в своем осевом направлении.
[00160] При необходимости желобчатый корпус 9-4 имеет коробчатую конструкцию, причем дно желоба желобчатого корпуса имеет сквозное отверстие для обеспечения возможности прохода через него подъемного винта 9-6, при этом указанное сквозное отверстие сообщается с нижней частью ограничительного желоба 9-41. После вставки регулировочной гайки 16-2 в ограничительный желоб 9-41 и соединения с ним кольцевой ограничительный выступ 16-21 ограничен в нижней части ограничительного желоба 9-41, без выпадения из сквозного отверстия. В указанном сквозном отверстии и в его конце, который является дальнем от нижней части ограничительного желоба 9-41, выполняют скругление кромок для облегчения установки подъемного винта 9-6.
[00161] Скругление кромок может быть обеспечено как скругленный угол или скругленные кромки 45×45°, или другие типы разделки кромок при условии, что расположение скругления может способствовать установке подъемного винта 9-6.
[00162] В настоящем изобретении закрывающая пластина 9-3 и желобчатый корпус 9-4 жестко соединены крепежными болтами, что не только может облегчать обслуживание и замену регулировочной гайки 16-2, но также обеспечивать осевое расположение регулировочной гайки 16-2.
[00163] Следует отметить, что в настоящем изобретении закрывающая пластина 9-3 и желобчатый корпус 9-4 могут быть жестко соединены посредством крепежных болтов, как описано выше, но указанное выше соединение не ограничиваются только описанным выше способом, и указанное прочное соединение может достигнуто иным способом, таким как штифтовое соединение или защелочное соединение, или тому подобное при условии, что закрывающая пластина 9-3 и желобчатый корпус 9-4 могут быть жестко соединены вместе посредством соединения, выполненного с возможностью рассоединения.
[00164] Также следует отметить, что в настоящем изобретении закрывающая пластина 9-3 и желобчатый корпус 9-4 соединены рассоединяемым способом, и закрывающая пластина 9-3 и желобчатый корпус 9-4 также могут быть соединены нерассоединяемым способом, и, например, закрывающая пластина 9-3 и желобчатый корпус 9-4 могут быть жестко соединены посредством соединения сваркой или склепыванием, или тому подобным способом при условии, что прочное соединение закрывающей пластины 9-3 с желобчатым корпусом 9-4 может осуществлять осевое расположение регулировочной гайки 16-2.
[00165] Закрывающая пластина 9-3 снабжена регулировочным отверстием 9-31; регулировочная гайка 16-2 может проходить вверх через указанное регулировочное отверстие 9-31, в результате чего диапазон регулировки подъемного винта 9-6 увеличивается.
[00166] В настоящем изобретении для облегчения вращения регулировочной гайки 16-2 и перемещения в осевом направлении подъемного винта 9-6 посредством регулировочной гайки 16-2 в конце регулировочной гайки 16-2, который является дальним от магнитного модуля 15, расположена приводная рукоятка 9-1; причем один конец приводной рукоятки 9-1 жестко соединен с регулировочной гайкой 16-2, а другой конец проходит через регулировочное отверстие в закрывающей пластине 9-3.
[00167] Такое расположение обеспечивает возможность выхода рукоятки управления 9-1 наружу из закрывающей пластины 9-3, так что вращение регулировочной гайки 16-2 может быть осуществлено с наружной стороны опорной рамы 16-1, вследствие чего вращение регулировочной гайки 16-2 вызывает перемещение подъемного винта 9-6 в осевом направлении и, в конечном счете, обеспечивает регулировку высоты магнитного модуля 15.
[00168] В настоящем изобретении приводная рукоятка 9-1 расположена коаксиально и неподвижно относительно регулировочной гайки 16-2.
[00169] Следует отметить, что приводная рукоятка 9-1 может быть расположена коаксиально и неподвижно относительно регулировочной гайки 16-2 или может быть расположена в любом положении на боковой стороне регулировочной гайки 16-2 в дальнем конце от магнитного модуля 15 при условии, что вращение регулировочной гайки 16-2 может быть вызвано поворотом приводной рукоятки 9-1.
[00170] В настоящем изобретении приводная рукоятка 9-1 снабжена сквозным отверстием, обеспечивающим возможность прохода через нее подъемного винта 9-6. В частности, сквозным отверстием является снабженное резьбой отверстие, и подъемный винт 9-6 посредством резьбы соединен с приводной рукояткой 9-1 в указанном снабженном резьбой отверстии. Снабженное резьбой отверстие выполнено в приводной рукоятке 9-1 таким образом, что длина резьбового взаимодействия подъемного винта 9-6 увеличена, и, таким образом, прочность резьбового соединения подъемного винта 9-6 также увеличена.
[00171] Следует отметить, что в настоящем изобретении указанное сквозное отверстие в приводной рукоятке 9-1 является снабженным резьбой отверстием, но это не является ограничением, и указанное отверстие также может быть выполнено в форме цилиндрического отверстия (без резьбы) при условии обеспечения возможности прохода подъемного винта 9-6 через указанное отверстие таким образом, что расстояние осевого перемещения подъемного винта 9-6 может быть увеличено.
[00172] В настоящем изобретении приводная рукоятка 9-1 и регулировочная гайка 16-2 жестко соединены путем их выполнения за одно целое.
[00173] Следует отметить, что приводная рукоятка 9-1 и регулировочная гайка 16-2 могут быть жестко соединены путем их выполнения за одно целое, как описано выше в настоящем изобретении, но указанное соединение не ограничивается только таким способом, и указанные элементы могут быть жестко соединены иным способом, таким как соединение сваркой, склепывание, резьбовое соединение или тому подобное, иными словами, при условии, что приводная рукоятка 9-1 может быть жестко соединена с регулировочной гайкой 16-2, и регулировочная гайка может быть приведена во вращение приводной рукояткой 9-1 для осевого перемещения подъемного винта 9-6.
[00174] В настоящем изобретении при необходимости опорная рама 16-1 содержит поддерживающую установочную пластину 9-5, которая выполнена с возможностью соединения с механизмом соединения сваркой.
[00175] Поддерживающая установочная пластина 9-5 обеспечивается множеством вторых соединительных отверстий 9-2. Регулируемый магнитный притягивающий модуль 9 жестко соединен со сварочным роботом посредством монтажных болтов, проходящих через вторые соединительные отверстия 9-2, и регулируемый магнитный притягивающий модуль 9 прикреплен к поверхности, прилипание к которой необходимо обеспечить, для достижения цели прикрепления механизма соединения сваркой к поверхности, прилипание к которой необходимо обеспечить, таким образом, что операция соединения сваркой может быть осуществлена механизмом соединения сваркой.
[00176] При необходимости в настоящем изобретении поддерживающая установочная пластина 9-5 расположена на наружной боковой стенке желобчатого корпуса 9-4, и множество поддерживающих установочных пластин 9-5 множества подъемных механизмов также расположены на той же боковой стороне для обеспечения соединения и установки с механизмом соединения сваркой.
[00177] Следует отметить, что положение и направление каждой поддерживающей установочной пластины 9-5 могут регулироваться согласно форме и положению соединения механизма соединения сваркой при том условии, что механизм соединения сваркой и подъемные механизмы могут быть соединены вместе поддерживающими установочными пластинами 9-5.
[00178] Как изображено на ФИГ. 15, в настоящем изобретении магнитный модуль 15 содержит монтажный кожух 15-1, крышку 15-2 и магнит 15-3, причем монтажный кожух 15-1 соединен с крышкой 15-2 для образования оболочечной конструкции с полостью 9-9, и магнит 15-3 расположен в полости 9-9.
[00179] При необходимости магнит в настоящем изобретении выполнен из стойкого к повышенной температуре сплава "неодим-железо-бор", причем магнит расположен в полости 9-9 таким образом, что полюс N и полюс S установлены противоположно друг другу, при этом полость 9-9 выполнена из алюминиевого материала, который эффективно передает магнитное поле, и крышка 9-10 полости, расположенная над полостью 9-9, выполнена из низкоуглеродистой стали с хорошей магнитной проницаемостью. При необходимости оболочечная конструкция, образованная соединением монтажного кожуха 15-1 и крышки 15-2, имеет три полости 9-9, которые расположены линейно, и, соответственно, количество магнитов составляет три, причем указанные три магнита установлены во взаимно-однозначном соответствии в указанных трех полостях 9-9. Каждая полость 9-9 может быть цилиндрической, и, соответственно, соответствующий магнит 15-3 является цилиндрическим. Следует отметить, что количество полостей 9-9 не ограничивается тремя, и количество магнитов 15-3 не ограничивается трем.
[00180] При таком расположением в нижней части монтажного кожуха 15-1 может быть создано магнитное поле большой силы, причем сила магнитного поля намного слабее у верхней и каждой боковой поверхности указанного кожуха, так что нижняя часть монтажного кожуха 15-1 может с большой силой притягиваться к поверхности, прилипание к которой необходимо обеспечить.
[00181] При необходимости рама гусеничного хода 1 дополнительно обеспечена датчиком 8 угловой ориентации.
[00182] Датчик 8 угловой ориентации установлен на соединительной пластине 1-1 кузова и выполнен с возможностью отслеживания угловой ориентации перемещения гусеничного сварочного робота в режиме реального времени и передачи контроллеру сигнала в качестве обратной связи, причем контроллер передает сигнал колесно-гусеничным ходовым механизмам 2 для осуществления регулировки их угловой ориентации.
[00183] Как может быть понятно из вышеуказанного описания, безрельсовый и ненаправляемый гусеничный сварочный робот согласно настоящему изобретению управляется колесно-гусеничными ходовыми механизмами при перемещении по поверхности большеразмерного или среднеразмерного плоского или криволинейного элемента конструкции, который должен быть соединен сваркой, и может вертикально медленно перемещаться вдоль стенки; гусеничный сварочный робот может выполнять операцию соединения сваркой при перемещении вперед или назад. При перемещении гусеничного сварочного робота вперед для соединения сваркой камера 5-4 на основе прибора с зарядовой связью (ПЗС) в модуле 5 лазерного слежения выполняет распознавание и отслеживание, а также камера 5-4 в модуле 5 лазерного слежения выполняет обнаружение сварного шва после соединения сваркой и наблюдение ширины и высоты подреза созданного сварного шва. Во время соединения сваркой сохраняют в памяти полученные ширину и высоту подреза сварного шва. После завершения сварочной операции данные усредняют, и усредненные данные имеют большое руководящее значение для параметров процесса покрытия.
[00184] Как показано на ФИГ. 11, модуль 5 лазерного слежения отслеживает сварной шов на основании следующего принципа:
[00185] Сигнал изображения, обнаруженный лазерным датчиком 5-3, передается на промышленный персональный компьютер, программное обеспечение для обработки изображения передает рассчитанные информационные данные о сварном шве контроллеру отслеживания, и контроллер отслеживания передает команду, побуждающую механизм 3 линейных колебаний сварочной головки управлять горизонтальным перемещением сварочной головки 12 при отслеживании сварного шва, а также инструктирует колесно-гусеничные ходовые механизмы 2 о побуждении сварочной головки 12 отслеживать изменение длины выступания электродной проволоки; одновременно программное обеспечение для обработки изображения передает рассчитанные информационные данные о сварном шве основному контроллеру гусеничного сварочного робота, и основной контроллер передает информацию относительно изменения кромок под сварку контроллеру источника питания для сварки для регулировки рабочих параметров источника питания для сварки в режиме реального времени. Механизм 3 линейных колебаний сварочной головки оборудован датчиком смещения, и сигнал смещения, генерируемый датчиком смещения, объединяется с сигналом угловой ориентации кузова, генерируемым датчиком 8 угловой ориентации кузова, вычисляется и обрабатывается контроллером отслеживания и затем передается основному контроллеру гусеничного сварочного робота для активации приводных устройств гусеничного сварочного робота таким образом, что гусеничный сварочный робот сохраняет параллельность сварному шву при выполнении операции соединения сваркой на плоской поверхности или криволинейной поверхности во всех положениях; и, кроме того, гусеничный сварочный робот оборудован ветрозащитным устройством 7, чтобы соответствовать требованиям дуговой сварки металла в защитном газе при скорости ветра не больше чем 10 м/с.
[00186] Способ управления гусеничным сварочным роботом, отличающийся тем, что включает следующие этапы:
S1. Управление регулируемым магнитным притягивающим модулем для поддержки стабильной силы прилипания между гусеничным сварочным роботом и поверхностью, прилипание к которой необходимо обеспечить;
S2. Получение информации относительно сварного шва;
S3. Управление сварочной головкой 12 для перемещения к местоположению сварного шва;
S4. Управление сварочной головкой 12 для поворота на угол, требуемый для процесса;
S5. Регулировка рабочих параметров источника энергии для соединения сваркой;
S6. Начало сварки и управление роботом гусеничного перемещения для автоматического и автономного гусеничного перемещения вдоль профиля (направления) сварного шва; и
S7. Завершение сварки.
[00187] При необходимости:
1. На этапе S2 посредством лазерного датчика 5-3 получают информацию о координатах местоположения и надежности сварного шва и сигнал изображения сварного шва;
2. Промышленный персональный компьютер выполняет обработку сигналов с использованием вышеуказанной информации о сварном шве и затем передает результат обработки контроллеру отслеживания и контроллеру источника энергии для соединения сваркой;
3. Контроллер отслеживания передает команду согласно информации о сварном шве;
4. Согласно команде относительно сварного шва механизм 3 линейных колебаний сварочной головки и механизм 6 зажима и угловых колебаний сварочной головки обеспечивают возможность перемещения сварочной головки 12 для отслеживания сварного шва и поддержки длины выступания электродной проволоки;
5. При перемещении сварочной головки 12 механизмом 3 линейных колебаний сварочной головки и механизмом 6 зажима и угловых колебаний сварочной головки передают сигнал смещения сварочной головки 12;
6. При перемещении гусеничного сварочного робота датчик 8 угловой ориентации на кузове передает сигнал угловой ориентации кузова;
7. Контроллер отслеживания вычисляет и обрабатывает входные данные, полученные на этапах 1, 5 и 6, в сочетании;
8. Контроллер отслеживания передает обработанные данные основному контроллеру гусеничного сварочного робота;
9. После вычисления основной контроллер гусеничного сварочного робота передает команду, побуждающую два серводвигателя 2-6 соответственно приводить два ведущих колеса 2-1 во вращение с различными скоростями таким образом, что гусеничный сварочный робот выполняет поворот;
10. После выполнения основным контроллером гусеничного сварочного робота вычислений на основании принятого сигнала изображения местоположения модуль 5 лазерного слежения перемещается колесно-гусеничными ходовыми механизмами 2 таким образом, что камера 5-4 всегда может держать в фокусе сварной шов;
11. Контроллер источника питания для сварки передает команду согласно информации о сварном шве для регулирования рабочих параметров источника питания для сварки в режиме реального времени;
12. Программное обеспечение главного компьютера, управляющее колебаниями, задает соответствующие параметры колебания сварочной головки согласно сварочным операциям, включающие параметры управления, такие как тип сварки, линейные колебания, колебательные (поперечные) колебания, амплитуда колебаний, скорость колебаний и время технологической паузы, и управляющие параметры после их задания передают контроллеру отслеживания;
13. Контроллер отслеживания обеспечивает колебание сварочной головки 12 с использованием механизма 6 зажима и угловых колебаний сварочной головки на основании параметров колебания сварочной головки, принятых от главного компьютера;
14. Ручной контроллер, соединенный с контроллером отслеживания, управляет параметрами сварки, для которых требуется микрорегулировка или ручное вмешательство во время процесса сварки;
15. Программное обеспечение для управления кузовом, инсталлированное в главном компьютере, задает соответствующие параметры управления кузовом на основании сварочных операций, включая расчетную скорость автоматического перемещения, скорость ручного перемещения, а также содержимое уже заданных параметров, и основной контроллер гусеничного сварочного робота принимает и хранит заданные параметры процесса и перемещается согласно указанным заданным значениям.
[00188] Положением сварочной головки 12 управляют следующим способом:
1. Гусеничный сварочный робот принуждает колесно-гусеничные ходовые механизмы 2 работать дифференциальным способом для осуществления рулевой функции гусеничного сварочного робота, благодаря которой может быть реализован рулевой поворот на 360°;
2. Механизм 3 линейных колебаний сварочной головки, механизм 4 линейных колебаний для лазерного слежения и колесно-гусеничные ходовые механизмы 2 осуществляют регулировку положения сварочной головки 12 для регулировки длины выступания электродной проволоки сварочной головки 12;
3. Механизм 6 зажима и угловых колебаний сварочной головки управляет угловым колебанием сварочной головки 12 посредством шагового привода (включающего редуктор) для соответствия требованиям конкретных сварочных операций.
[00189] Настоящее изобретение обеспечивает следующие преимущества по сравнению с уровнем техники:
1. Колесно-гусеничные ходовые механизмы 2 обеспечивают гусеничное перемещение без рельсов или направляющих, так что диапазон свариваемости является большим; вспомогательное время соединения сваркой может быть значительно сокращено, и экономическая эффективность производства является высокой; и может быть достигнуто соединение сваркой большеразмерных и среднеразмерных элементов конструкций во всех положениях.
2. Величина магнитной силы прилипания регулируется регулировочным магнитным притягивающим модулем, так что гусеничный сварочный робот может перемещаться на гусеницах на плоской поверхности и криволинейной поверхности с большой кривизной и имеет высокую адаптируемость к производственным условиям.
3. Надежное отслеживание сварных швов может быть достигнуто с использованием улучшенного распознавания сварного шва и технологий мультисенсорного получения данных плавления, вследствие чего может быть обеспечено качество соединения сваркой, и сварной шов может быть отслежен с точностью до ±0,3 мм и по высоте в пределах ±0,5 мм, и может быть отслежен в неограниченном диапазоне расстояний.
4. Гусеничный сварочный робот оборудован ветрозащитным устройством 7 для соответствия требованиям газовой металлической дуговой сварки (GMAW), при условии, что скорость ветра составляет не больше чем 10 м/с.
5. Соответствующую информацию, такую как ширина сварного шва, получают путем захвата изображения и передают основному контроллеру гусеничного сварочного робота, причем основной контроллер гусеничного сварочного робота регулирует контроллер источника питания сварки для достижения регулировки напряжения и тока источника питания сварки, что может соответствовать регулировке в режиме реального времени сварочных операций с нерегулярным изменением сварного шва.
[00190] Гусеничный сварочный робот согласно настоящему изобретению оборудован колесно-гусеничными ходовыми механизмами 2 для перемещения на гусеницах без рельсов или направляющих, имеет большой диапазон свариваемости, может перемещаться по поверхностям большеразмерных и среднеразмерных плоских или криволинейных элементов конструкций, подлежащих соединению сваркой, может вертикально перемещаться на гусеницах по стенке и может выполнять операцию соединения сваркой при перемещении вперед или назад таким образом, что достигается соединение сваркой большеразмерных и среднеразмерных элементов конструкции во всех положениях, причем вспомогательное время соединения сваркой может быть значительно уменьшено, и экономическая эффективность производства является высокой; величина магнитной силы прилипания регулируется регулировочным магнитным притягивающим модулем 9 таким образом, что гусеничный сварочный робот может перемещаться на гусеницах по плоской и криволинейной поверхности с большой кривизной и имеет высокую адаптируемость к производственным условиям.
[00191] В конечном счете следует отметить, что вышеуказанные варианты реализации предназначены только для иллюстрации технических решений настоящего изобретения и не предназначены для ограничения настоящего изобретения. Несмотря на то, что настоящее изобретение подробно описано на примере конкретных вариантов реализации, специалистам понятно, что технические решения в описанных выше вариантах реализации могут быть изменены, а некоторые или все технические признаки настоящего изобретения могут быть заменены эквивалентами; при этом указанные изменения или замены могут быть сделаны без выведения сущности соответствующих технических решений из объема охраны технических решений вариантов реализации настоящего изобретения.
[00192] Кроме того, специалистам понятно, что несмотря на то, что некоторые варианты реализации в настоящей заявке включают некоторых, но не остальные признаки, включенные в другие варианты реализации, сочетания признаков различных вариантов реализации находятся в пределах объема охраны настоящего изобретения и образуют различные варианты реализации настоящего изобретения. Например, в приложенной формуле любые из заявленных вариантов реализации могут использоваться в любом сочетании. Информация, раскрытая в разделе "УРОВЕНЬ ТЕХНИКИ", приведена только для углубленного понимания общего уровня техники настоящего изобретения, и не может считаться принятием или допущением в какой-либо форме того, что эта информация составляет уровень техники, известный специалистам.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[00193] В целом, настоящее изобретение обеспечивает гусеничный сварочный робот, который имеет широкий диапазон работы высокую производительность, а также способ его управления.
Реферат
Изобретение относится к гусеничному сварочному роботу. Робот содержит регулируемый магнитный притягивающий модуль (9), колесно-гусеничные ходовые механизмы (2), раму (1) гусеничного хода и сварочное навесное устройство (11). Сварочное навесное устройство (11) расположено на раме (1) гусеничного хода. Колесно-гусеничные ходовые механизмы (2) расположены на двух противоположных концах рамы (1) гусеничного хода для обеспечения мощности для перемещения на гусеницах рамы (1) гусеничного хода. Регулируемый магнитный притягивающий модуль (9) расположен на раме (1) гусеничного хода между двумя колесно-гусеничными ходовыми механизмами (2). Гусеничный сварочный робот оборудован колесно-гусеничными ходовыми механизмами (2) для перемещения на гусеницах без рельсов или направляющих, имеет большой диапазон свариваемости, может перемещаться по поверхности большеразмерных и среднеразмерных плоских или криволинейных элементов конструкций, подлежащих соединению сваркой, может вертикально перемещаться на гусеницах по стенке и может выполнять операцию соединения сваркой при перемещении вперед или назад таким образом, что достигается соединение сваркой большеразмерных и среднеразмерных элементов конструкций во всех положениях, вспомогательное время соединения сваркой может быть значительно уменьшено и экономическая эффективность производства повышена. В гусеничном роботе величина магнитной силы прилипания регулируется регулируемым магнитным притягивающим модулем (9), так что он может перемещаться на гусеницах по плоской поверхности и криволинейной поверхности с большой кривизной и имеет высокую адаптируемость к производственным условиям. 2 н. и 17 з.п. ф-лы, 15 ил.
Комментарии