Манипулятор параллельной структуры с шестью степенями свободы - RU162777U1
Код документа: RU162777U1
Чертежи
Описание
Полезная модель относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с шестью степенями свободы с рабочей зоной, отделенной от зоны расположения приводов.
Известен пространственный механизм с шестью степенями свободы (Пат. ПМ №147057 от 25.09.2014 г. «Манипулятор параллельной структуры с шестью степенями свободы», МПК F16H 21/02), содержащий основание, конечное звено, три кинематические цепи, каждая из которых содержит стержень, связанный с конечным звеном посредством сферического шарнира и сопряженный с основанием посредством сферического шарнира с отверстием, выполненным с возможностью поступательного перемещения стержня относительно основания, два линейных привода, содержащие закрепленный на основании неподвижный винт и подвижную часть - двигатель с приводной гайкой, причем приводы и конечное звено расположены по разные стороны от основания и каждый линейный привод снабжен промежуточным звеном, один конец которого связан с подвижной частью привода посредством карданного шарнира в котором, осью и втулкой входной вращательной пары являются неподвижный винт линейного привода и приводная гайка, а ось выходной вращательной пары закреплена на подвижной части привода, второй конец промежуточного звена связан со стержнем посредством трех последовательно установленных вращательных пар, осью первой пары является промежуточное звено, а осью третьей пары является стержень, причем оси вторых кинематических пар и промежуточных звеньев, относящихся к одному стержню, пересекаются в одной точке, а оси вторых кинематических пар перпендикулярны стержню.
К недостаткам такого механизма можно отнести ограниченную жесткость устройства, связанную с тремя кинематическими цепями, что снижает его нагрузочную способность. Недостаточная жесткость устройства также может привести к увеличению вибрации выходного звена и, соответственно, закрепленного на нем инструмента или детали.
Цель полезной модели - устранение отмеченных недостатков и повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам с рабочей зоной конечного звена, отделенной от зоны расположения приводов.
Поставленная цель достигается тем, что в пространственном механизме с шестью степеням свободы содержащем основание, конечное звено, кинематические цепи, каждая из которых содержит стержень, связанный с конечным звеном посредством сферического шарнира и сопряженный с основанием посредством сферического шарнира с отверстием, выполненным с возможностью поступательного перемещения стержня относительно основания, шесть вращательных привода, содержащих закрепленный на основании неподвижный винт и подвижную часть - двигатель с приводной гайкой, причем приводы и конечное звено расположены по разные стороны от основания. На основании установлены шесть вращательных привода, соединенные с конечным звеном четырьмя кинематическими цепями, в которых каждый привод снабжен промежуточным звеном, один конец которого связан с приводом посредством карданного шарнира, имеющий входную вращательную пару, образованную неподвижным винтом и подвижной частью привода, и выходную вращательную пару, закрепленную на подвижной части привода перпендикулярно его винту. Второй конец промежуточного звена связан со стержнем посредством трех последовательно установленных вращательных пар, осью первой пары является промежуточное звено, а осью третьей пары является стержень, причем оси вторых кинематических пар и промежуточных звеньев, относящихся к одному стержню, пересекаются в одной точке, а оси вторых кинематических пар перпендикулярны стержню. Стержни двух из четырех кинематических цепей связаны с двумя вращательными приводами каждый посредством двух промежуточных звеньев, соединенных со стержнем с помощью двух вращательных пар, имеющих перпендикулярные оси, где осью первой кинематической пары является стержень, а ось второй кинематической пары соединена с втулкой первой, при этом оси вращения кинематических пар и ось промежуточного звена, относящиеся к одному стержню, пересекаются в одной точке.
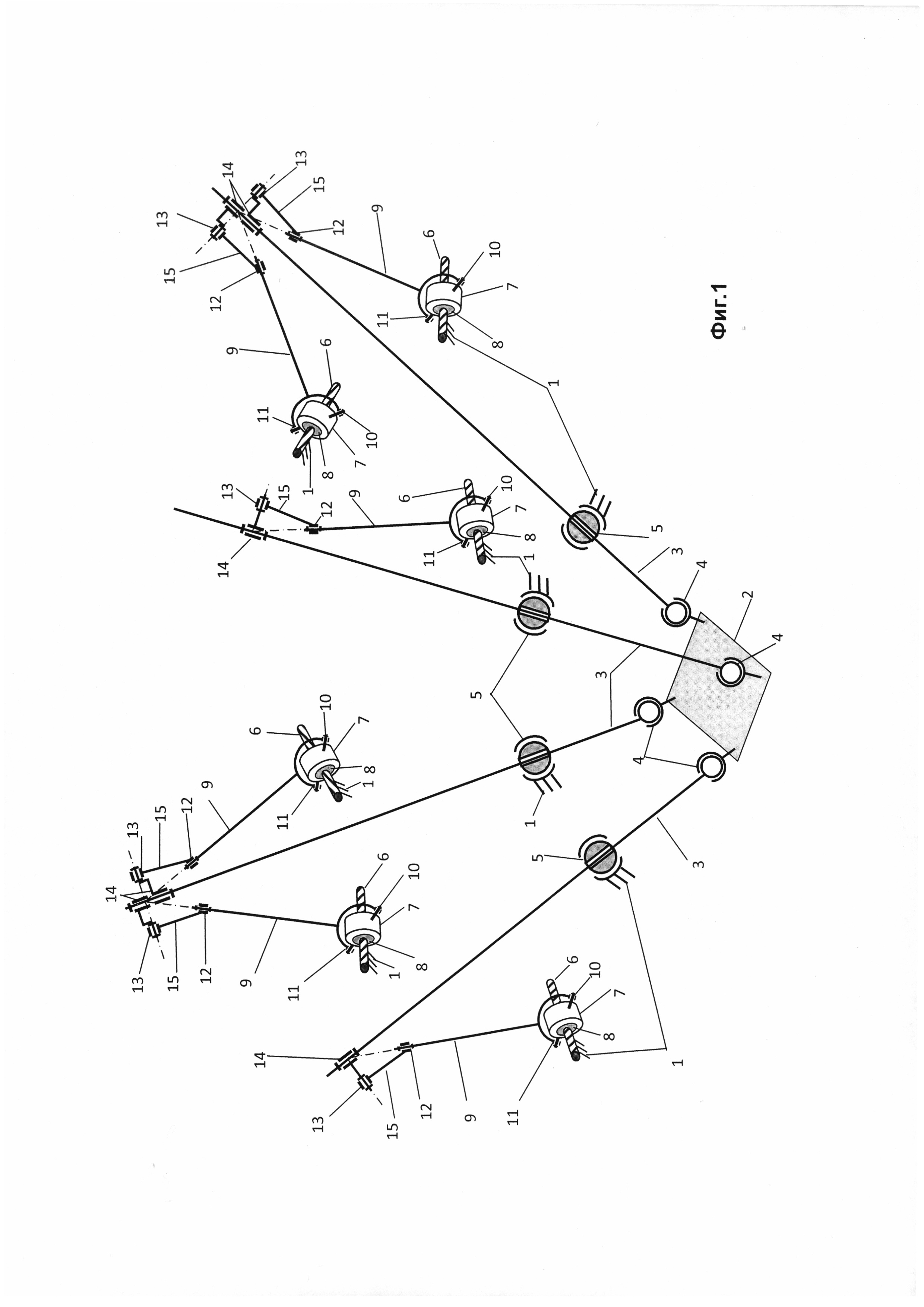
Устройство - пространственный механизм с шестью степенями свободы представлен на Фиг. 1.
Пространственный механизм с шестью степенями свободы (Фиг. 1) состоит из основания 1, конечного звена 2, четырех кинематических цепей, каждая из которых включает стержень 3, связанный с конечным звеном 2 посредством сферического шарнира 4 и сопряженный с основанием 1 посредством сферического шарнира 5 с отверстием, выполненным с возможностью поступательного перемещения в нем стержня 3. Неподвижные части вращательных приводов 6 жестко закреплены на основании 1, а подвижные части 7, включающие двигатель и приводную гайку 8 связаны с одним концом промежуточного звена 9 посредством карданного шарнира, выполненного в виде имеющих ось и втулки входной и выходной вращательных кинематических пар с пересекающимися под прямым углом осями, где неподвижная часть 6 играет роль оси, а приводная гайка 8 - втулки входной вращательной пары. Ось 10 выходной вращательной пары закреплена на подвижной части 7 привода перпендикулярно части 6, один конец промежуточного звена 9 соединен со втулками 11 выходной вращательной пары, второй конец промежуточного звена связан со стержнем посредством трех последовательно установленных вращательных пар 12, 13, 14 и дополнительного звена 15, где осью первой кинематической пары 12 является промежуточное звено 9, втулки первой 12 и второй 13 кинематических пар связаны дополнительным звеном 15, осью третьей пары 14 является сам стержень 3, причем ось второй кинематической пары 13 перпендикулярна стержню 3, а оси кинематических пар и промежуточных звеньев, относящихся к одному стержню, пересекаются в одной точке. Такая последовательность кинематических пар аналогична карданному шарниру.
В двух из четырех кинематических цепей стержень 3 связан посредством кинематических пар 14, 13, 12 дополнительных 15 и промежуточных 9 звеньев со втулками 11 двух линейных приводов 7.
Пространственный механизм с шестью степенями свободы работает следующим образом.
Перемещение конечного звена 2 относительно основания 1, осуществляется посредством четырех кинематических цепей, при этом каждый поступательный привод передает движение со своей подвижной части 7, содержащей двигатель, через приводную гайку 8 и карданный шарнир выполненный в виде имеющих ось и втулки входной и выходной вращательных кинематических пар с пересекающимися под прямым углом осями, где осью и втулкой входной вращательной пары являются неподвижный винт линейного привода 6 и приводная гайка 8, сопряженная с подвижной частью привода 7. Затем через ось 10 выходной вращательной пары, которая закреплена на подвижной части 7 привода - на соответствующее промежуточное звено 9 и затем через вращательные пары 12, 13, 14 и дополнительное звено 15 на стержень 3, передающий движение на конечное звено 2 посредством сферического шарнира 4. Поскольку приводы расположены на основании 1 по другую сторону относительно конечного звена 2, то каждый стержень 3 перемещается относительно основания 1 с помощью сферического шарнира 5, выполненного с возможностью поступательного перемещения стержня 3. Механизм обеспечивает конечному звену 2 шесть степеней свободы.
Реферат
Манипулятор параллельной структуры с шестью степенями свободы, содержащий основание, конечное звено, вращательные приводы, имеющие подвижную и неподвижную части, где неподвижная часть закреплена на основании, причем приводы и конечное звено расположены по разные стороны от основания, кинематические цепи, каждая из которых содержит стержень, связанный с конечным звеном посредством сферического шарнира и сопряженный с основанием посредством сферического шарнира с отверстием, выполненным с возможностью поступательного перемещения стержня относительно основания, при этом один конец стержня с помощью сферического шарнира связан с конечным звеном, а другой связан с подвижной частью соответствующего привода посредством промежуточного звена и карданного шарнира, в котором осью и втулкой входной вращательной пары являются неподвижный винт вращательного привода и приводная гайка, а ось выходной вращательной пары закреплена на подвижной части привода, с которой соединен второй конец промежуточного звена, связанный со стержнем посредством трех последовательно установленных вращательных пар, где осью первой пары является промежуточное звено, а осью третьей пары является стержень, причем оси вторых кинематических пар и промежуточных звеньев, относящихся к одному стержню, пересекаются в одной точке, а оси вторых кинематических пар перпендикулярны стержню, отличающийся тем, что в нем на основании установлены шесть вращательных приводов, соединенных с конечным звеном четырьмя кинематическими цепями, в которых стержни двух из четырех кинематических цепей связаны с двумя вращательными приводами каждый посредством дву
Формула

Комментарии