Исполнительный механизм - RU2381099C2
Код документа: RU2381099C2
Чертежи





















Описание
Настоящее изобретение относится к исполнительному механизму и, в частности, имеет отношение к исполнительным механизмам линейного и вращательного движения, в частности, используемым для управления механическими руками-манипуляторами.
В условиях расширения использования механических рук-манипуляторов в производственных процессах и для выполнения функций общего осмотра и технического обслуживания имеет место увеличение количества функций управления, связанных с каждой рукой, и то, что для конструктивно усложненной, многофункциональной руки требуется около тридцати отдельных элементов управления, уже не является чем-то необычным. Каждому из этих элементов требуется индивидуальное управление с помощью отдельного исполнительного механизма.
Таким образом, становится необходимым сконцентрировать большое количество функций управления в относительно небольшом пространстве. Контроль или управление многими руками-манипуляторами осуществляется с помощью управляющих тросов. Поскольку руки становятся конструктивно более сложными и меньшими по размеру, то они становятся способными выполнять более замысловатые операции, для которых требуется большее количество управляющих функций, при этом растет спрос на большее количество функций управления в постоянно уменьшающемся пространстве.
Традиционно исполнительные механизмы для тросов управления руками-манипуляторами выполняются по типу кабестана. Они включают электродвигатель, приводящий в движение закручиваемый кабестан, на который наматывается трос управления. Работающий двигатель приводит в движение кабестан и вызывает соответствующее перемещение троса или обеспечивает возможность такого перемещения. Такие фрикционные приводы относительно громоздки и, помимо прочего, обладают тенденцией к растяжению и проскальзыванию троса вокруг кабестана, тем самым затрудняя обеспечение точности управления. Чтобы справиться с этой проблемой, механизм управления и электроприводы для каждого управляющего устройства размещены с зазором по отношению к основанию или базовой плоскости рук-манипуляторов, что приводит к образованию относительно большого и громоздкого узла управления рукой.
При попытке преодолеть этот недостаток были разработаны линейные исполнительные механизмы, снабженные подвижной кареткой, к которой прикреплен управляющий трос, при этом весь узел установлен на шнеке или червяке, вращение которого приводит к перемещению каретки. Недостатком такого устройства является относительный вес узла и неизбежный «мертвый» ход в червячной или шнековой конструкции. Более того, подобные устройства характеризуются тенденцией к созданию относительно больших сил трения, и выигрыш в силе, который может быть получен, по сути, обусловлен наличием наклонной плоскости, образованной шагом винтовой линии.
В качестве альтернативы можно использовать шариковинтовую передачу, которая позволяет максимально уменьшить возможность «мертвого» хода. Однако такая конструкция является дорогой и подходит только для устройств с коротким ходом, поскольку увеличение длины приводит к увеличению веса, а инерционность шариковинтовых передач, рассчитанных на большой ход, в общем случае, неприемлема. Кроме того, соединение троса управления с шариковинтовым устройством обычно является сложной практической задачей.
Таким образом, необходим линейный исполнительный механизм, способный передать большое нагружающее усилие на трос управления при низких потерях на трение, обладающий при этом компактной конструкцией, что позволяет разместить все необходимое для управления рукой-манипулятором или подобным устройством в относительно небольшом пространстве.
Многие исполнительные механизмы, используемые в промышленности для общего позиционирования (по сравнению с теми, что используются для натяжных тросов), приводятся в действие электроприводом и их можно подразделить на несколько категорий в зависимости от скорости и на несколько категорий в зависимости от точности. Различают следующие категории устройств в зависимости от скорости: низкоскоростные (примерно, 0-25 мм в секунду), среднескоростные (примерно, 25-500 мм в секунду) и высокоскоростные (>500 мм в секунду). Категории устройств в зависимости от точности можно определить следующим образом: устройства с нулевой точностью (не требуется позиционирование в абсолютной системе отсчета и «мертвый» ход несущественен), устройства с низкой точностью (требуется позиционирование и допустим некоторый «мертвый» ход, примерно 0,25-3 мм) и устройства с высокой точностью (где требуется точное позиционирование и нулевой/малый «мертвый» ход - примерно 0,001-0,25 мм). Такие исполнительные механизмы зачастую приводятся в действие поворотными электродвигателями; хотя существуют линейные исполнительные механизмы с прямым приводом, они являются дорогостоящими с точки зрения проектирования и управления. При использовании поворотного электродвигателя для приведения в движение линейного исполнительного механизма возможны несколько конструктивных вариантов для получения поступательного перемещения, сюда относятся ременные приводы, ходовые винты, шариковые винты и реечно-шестеренчатые механизмы. В большинстве случаев для низко- и среднескоростного назначения между электродвигателем и преобразователем поступательного перемещения должна быть установлена коробка передач, чтобы обеспечить соответствие между скоростью электродвигателя (обычно 3000-6000 об/мин) и требуемой скоростью шкива/шестерни/шарикового винта. Установка коробки передач существенно повышает стоимость, особенно если необходима высокая точность, как и при условии нулевого/малого «мертвого» хода, поскольку коробка передач должна обеспечивать, по меньшей мере, такую же точность, как электродвигатель и преобразователь поступательного перемещения.
Настоящее изобретение относится к исполнительному механизму, содержащему приводной ремень, предназначенный для создания движения с использованием волнового принципа, что снижает или исключает необходимость в коробке передач между электродвигателем и ведущим шкивом при использовании в условиях малых и средних скоростей. Дополнительным преимуществом такого привода является практическое отсутствие «мертвого» хода, что обеспечивает возможность получения привода, характеризующегося высокой точностью при относительно низкой стоимости.
Согласно изобретению предлагается исполнительный механизм, содержащий:
первый ведущий шкив;
второй ведущий шкив, при этом первый и второй ведущие шкивы сблокированы для совместного вращения;
первый ведомый шкив;
второй ведомый шкив;
бесконечный приводной ремень, взаимодействующий с первым и вторым ведущими шкивами, а также с первым и вторым ведомыми шкивами;
электродвигатель, подключенный для приведения во вращательное движение первого и второго ведущих шкивов и перемещения бесконечного приводного ремня;
ведомый элемент, несущий, по меньшей мере, один из ведомых шкивов;
при этом первый и второй ведущие шкивы выполнены таким образом, что при их вращении окружная скорость первого ведущего шкива отличается от окружной скорости второго ведущего шкива, а бесконечный приводной ремень обведен петлей вокруг ведущих и ведомых шкивов таким образом, что разность между окружными скоростями первого и второго ведущих шкивов вызывает перемещение ведомого элемента.
В следующем конкретном описании, в приведенных вариантах осуществления изобретения использован приводной ремень. Термин «приводной ремень» используется также в формуле изобретения и преамбуле, и если только не указано как-либо иначе, понятие «ремень» следует трактовать как включающее в себя любой подходящий однородный или бесконечный приводной элемент, такой как цепь, кабель, трос или подобный. Аналогичным образом термин «шкив» используется во всем тексте следующего конкретного описания, поскольку обычно с приводным ремнем применяют шкивы, но понятие «шкив» следует трактовать как включающее в себя шестерни и звездочки, а также зубчатые колеса или колеса без зубьев, или ролики, или подобные им элементы.
Окружные скорости могут отличаться из-за различия окружных длин ведущих шкивов, скоростей вращения или в силу обеих этих причин.
Приводной ремень может быть зубчатым, и в таких вариантах осуществления изобретения, по меньшей мере, ведущие шкивы предпочтительно выполнены с зубьями для взаимодействия с ремнем.
Исполнительный механизм может быть механизмом с вращательным движением, предпочтительно с двумя ведомыми элементами, взаимно соединенными посредством второго приводного ремня, при этом второй приводной ремень взаимодействует со шкивом, установленным для (регулируемого) вращательного движения. В виде варианта исполнительный механизм может быть линейным исполнительным механизмом, предпочтительно снабженным кареткой, установленной с возможностью поступательного перемещения.
Некоторые варианты выполнения исполнительных механизмов с поступательным и вращательным движением включают один или более направляющих шкивов, с которыми также взаимодействует бесконечный приводной ремень и которые служат для направления и/или изменения направления приводного ремня между ведущим и ведомым шкивами. В качестве варианта первый и второй ведущие шкивы сблокированы для вращения в противоположных направлениях, что позволяет избежать необходимости установки направляющих шкивов.
К ведомому элементу может быть подсоединен трос управления, при этом перемещение ведомого элемента вызывает соответствующее перемещение троса управления. Трос управления может быть соединен, например, с рукой-манипулятором.
В качестве двигателя может быть выбран электрический двигатель. В конкретном варианте осуществления настоящего изобретения электрический двигатель может приводить в движение ведущие шкивы через узел, включающий червяк и червячное колесо, создавая таким образом дополнительный выигрыш в силе. В этих вариантах порой является предпочтительным, чтобы шаг червяка и червячного колеса был выбран с целью предотвращения обратного хода. Такое выполнение создает преимущество, заключающееся в отсутствии необходимости наличия тормозного механизма.
Может быть предусмотрено обеспечение постоянного перегиба приводного ремня в одном направлении вокруг различных шкивов, то есть предпочтительно по направлению к зубьям в вариантах изобретения с зубчатым ремнем. В виде варианта приводной ремень может быть изогнут в обоих направлениях, то есть как в сторону зубьев, так и от них, по мере его прохождения вокруг различных шкивов, таким образом, при прохождении ремня вокруг некоторых шкивов зубья ремня обращены наружу. Изгиб ремня в обоих направлениях описан здесь как привод обратного изгиба, при этом привод обратного изгиба можно использовать в исполнительных механизмах как поступательного, так и вращательного перемещения.
Во всех вариантах осуществления изобретения, где конкретно используется приводной ремень (то есть, например, не цепь и не трос), ориентирование траектории приводного ремня между ведущими шкивами, ведомыми и направляющими (если есть) шкивами соответственно выполняется с помощью углового шкива. Размер и угол наклона шкива выбираются таким образом, чтобы центральная ось волокон ткани ремня была, по существу, коаксиальна соответствующим шкивам, между которыми он находится. Это означает, что приводной ремень закручен вдоль этой оси с небольшим смещением в поперечном направлении или при его отсутствии, обеспечивая таким образом минимальное изменение напряжения по волокнам ткани ремня.
Линейные исполнительные механизмы в соответствии с настоящим изобретением являются особенно подходящими для управления руками-манипуляторами такого типа, который описан в международной заявке № WO 2002/016995, раскрытие материалов которой предусмотрено в настоящем документе путем ссылки на нее.
Далее следует описание нескольких примеров выполнения исполнительного механизма в соответствии с настоящим изобретением, со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 представлен вид в перспективе первого варианта выполнения линейного исполнительного механизма в соответствии с настоящим изобретением;
на фиг.2 представлена схема при виде сбоку, иллюстрирующая положение ведомых шкивов по отношению к ведущим шкивам;
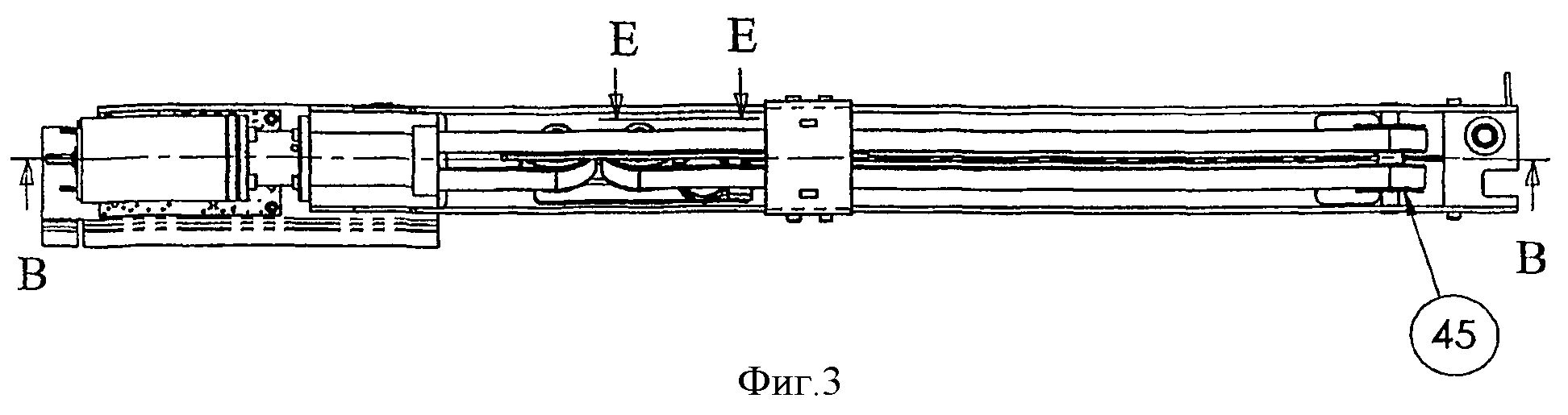
на фиг.3 представлен вид сверху на исполнительный механизм, изображенный на фиг.1;
на фиг.4 представлен вид сбоку на исполнительный механизм, изображенный на фиг.1, с вырезанной частью;
на фиг.5 представлен вид в разрезе по линии В-В на фиг.3;
на фиг.6 представлен частичный разрез по линии Е-Е каретки на фиг.3;
на фиг.7 представлен частичный разрез по линии С-С на фиг.4;
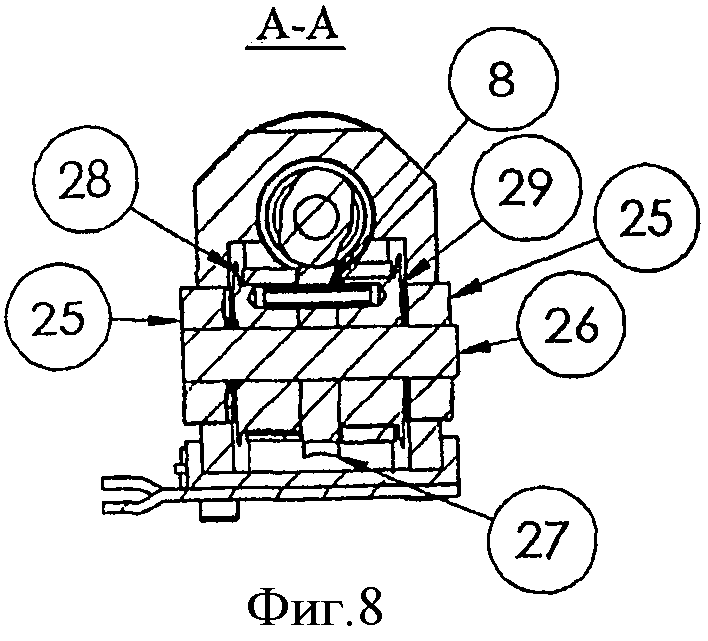
на фиг.8 представлен разрез по ведущим шкивам по линии А-А фиг.4;
на фиг.9 представлен подробный вид на участок, обозначенный буквой D на фиг.4;
на фиг.10 представлено изображение приводного узла исполнительного механизма, изображенного на фиг.1, в разобранном виде;
на фиг.11 представлен вид в перспективе исполнительного механизма с фиг.1, со снятым корпусом;
на фиг.12 представлен вид в перспективе второго варианта выполнения линейного исполнительного механизма в соответствии с изобретением, со снятой частью каретки;
на фиг.13 представлен вид в перспективе расположения приводного ремня в исполнительном механизме, изображенном на фиг.12;
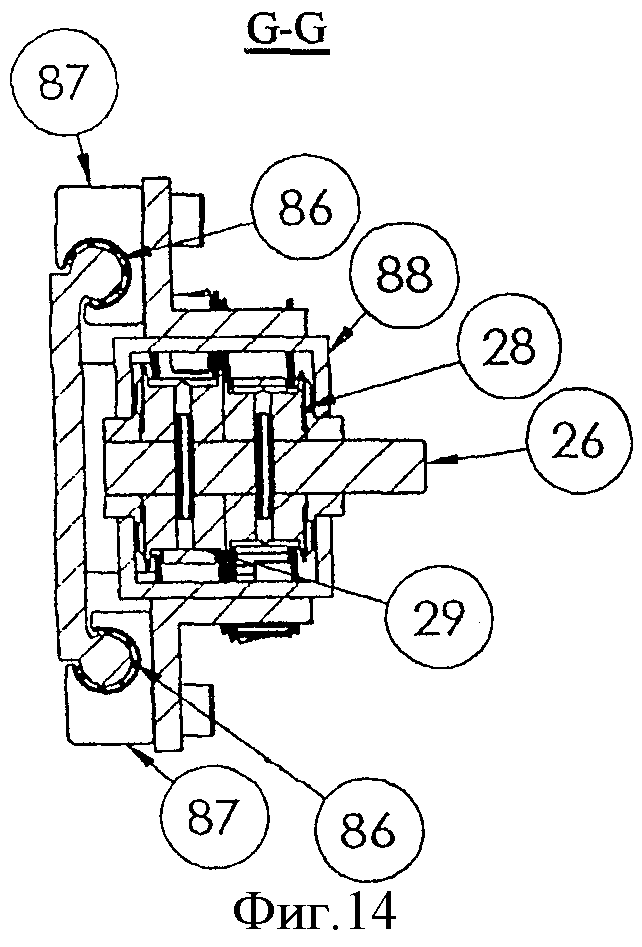
на фиг.14 представлен вид в разрезе по линии G-G на фиг.15;
на фиг.15 представлен вид сверху на исполнительный механизм, изображенный на фиг.12, с установленной кареткой;
на фиг.16 представлен вид сбоку на исполнительный механизм, изображенный на фиг.15;
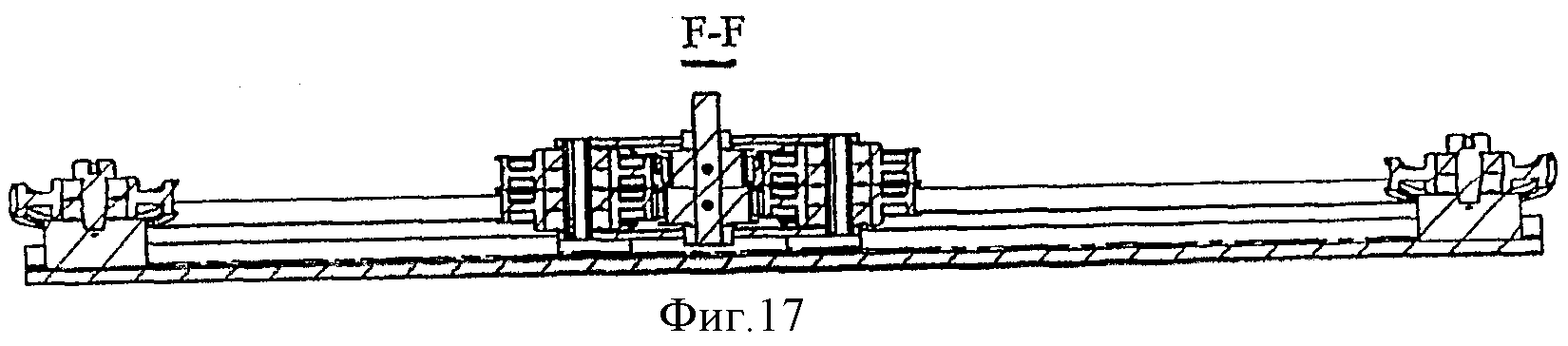
на фиг.17 представлен вид в разрезе по линии F-F на фиг.15;
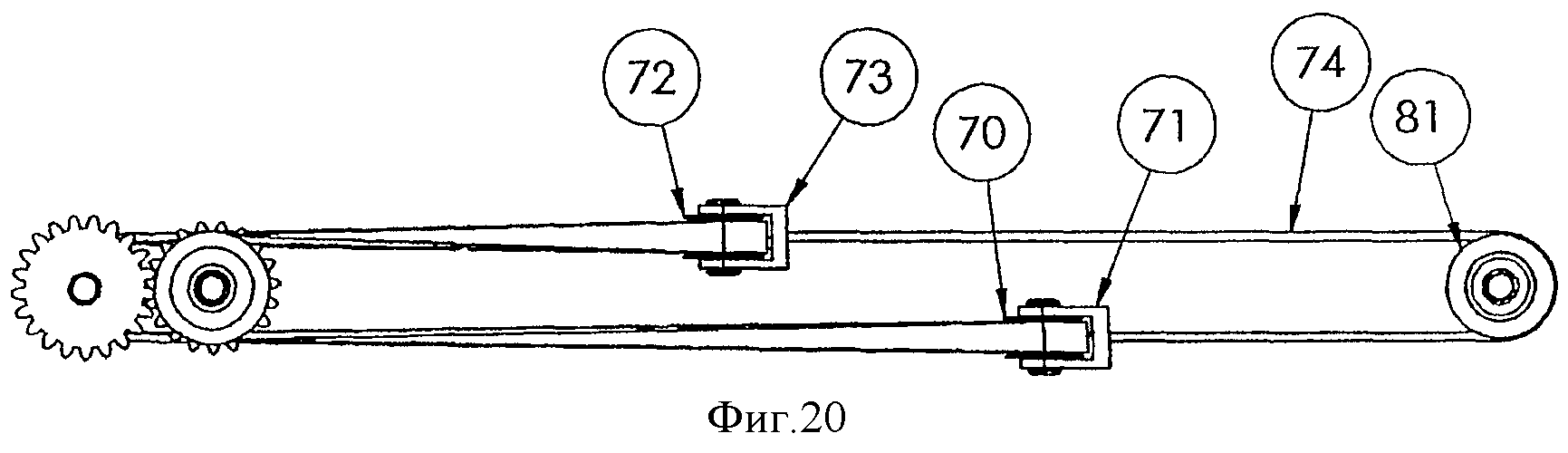
на фиг.18-20 представлены схематические изображения первого варианта выполнения линейного или вращательного исполнительного механизма в соответствии с настоящим изобретением;
на фиг.21 представлен вариант выполнения по фигурам 18-20;
на фиг.22 представлен вид в перспективе варианта выполнения исполнительного механизма вращательного движения в соответствии с изобретением;
на фиг.23 представлен вид в разрезе по линии Н-Н на фиг.25;
на фиг.24 представлен вид в перспективе расположения приводного ремня в варианте выполнения, изображенном на фиг.22;
на фиг.25 представлен вид сверху на исполнительный механизм, изображенный на фиг.22, а на фиг.26 представлен вид в разрезе по линии L-L на фиг.25.
В следующем далее описании, для сходных компонентов в различных вариантах выполнения использованы одни и те же номера позиций.
При первоначальном обращении к фиг.1 исполнительный механизм, обозначенный в целом позицией 10, содержит продольный корпус 11 желобчатой формы, на одном конце 12 которого установлен электродвигатель и узел управления, обозначенный в целом позицией 14, при этом на другом конце 13 установлена направляющая 15 троса управления (см. фиг.7).
Электродвигатель и узел управления 14 содержат червячный блок 16, основание 17 которого прикреплено к основанию желобчатого корпуса 11, на его конце 12. На задней поверхности 9 червячного блока 16 установлен электрический двигатель 19, который через соединительную муфту 7 (фиг.5) вращает приводной вал 20, выступающий через упомянутую заднюю поверхность 9 и оканчивающийся в приводном червяке 21 (см. фиг.5 и 10). Передняя поверхность червячного блока 16 срезана для образования переднего отверстия 31 (фиг.10).
В обеих боковых стенках 23 червячного блока 16 выполнены круглые отверстия для образования поперечного канала 24, при этом в каждом из упомянутых отверстий установлен соответствующий подшипник 25. Каждый подшипник 25 предназначен для размещения в нем с возможностью вращения оси 26 и для вращения с его помощью червячного колеса 27, первого ведущего шкива 28 и второго ведущего шкива 29. В этом варианте выполнения червячное колесо 27, первый ведущий шкив 28 и второй ведущий шкив 29 образуют узел; понятно, что первый ведущий шкив 28 и второй ведущий шкив 29 могут быть выполнены в виде независимых компонентов, каждый из которых может быть зафиксирован шпонкой на червячном колесе 27 для совместного с ним вращения с помощью средств, широко известных в технике, или, как показано в этом варианте выполнения, с использованием шпильки 8 для соединения. Узел червячного колеса и шкивов снабжен прокладками и шайбами 34 для обеспечения соответствующего положения червячного колеса 27 и связанных с ним первого и второго ведущих шкивов 28 и 29 по отношению к переднему отверстию 31.
Каждый из ведущих шкивов - первый 28 и второй 29 - выполнен с соответствующими зубьями 32. В этом варианте выполнения радиус и соответственно окружная длина второго ведущего шкива 29 больше соответствующих параметров первого ведущего шкива 28, при этом на втором ведущем шкиве 29 выполнено на один зуб больше, чем на первом ведущем шкиве 28 (в других вариантах ведущие шкивы могут отличаться окружной длиной на величину большую, чем один зуб). Каждый из ведущих шкивов 28 и 29 приспособлен для размещения дуги обхвата бесконечного приводного ремня 40.
Приводной ремень 40 представляет собой бесконечный или монотонный ремень, который в данном варианте выполнения имеет в основном прямоугольную форму поперечного сечения с зубьями на своей внутренней поверхности. Каждый из упомянутых зубьев предназначен для взаимодействия с соответствующими зубьями 32 на шкивах 28 и 29 соответственно.
Средства фиксации червячного блока 16 также обеспечивают крепление заднего выступа 35 к корпусу 11, при этом на выступе 35 установлена плата с печатной схемой 36, через которую осуществляется управление электрическим двигателем 19.
На другом конце 13 корпуса 11 установлен также узел шкива, обозначенный в целом позицией 45 (см. фиг.3). Узел шкива 45 связан с направляющей троса управления, обозначенной в целом позицией 15 (фиг.7). Для опоры узла 45 в корпусе 11 выполнены прорези 46 (фиг.1), при этом в прорезях размещена поперечная ось 47 (фиг.1 и 7), на которую, в свою очередь, опираются с возможностью вращения направляющие шкивы 48 и 49 соответственно. Каждый из направляющих шкивов 48 и 49 предназначен для размещения дуги обхвата ремня 40 и каждый из них независимо вращается на поперечной оси 47. Положение оси 47 поддерживается в прорезях 46 натяжением приводного ремня 40. Натяжение приводного ремня 40 отрегулировано во время сборки с помощью скосов 6, действующих на подшипники 25 в корпусе 11 (см. фиг.4). По другому варианту выполнения к корпусу может быть прикреплена съемная опорная деталь для оси 47 и могут быть предусмотрены средства для отжима опорной детали от электродвигателя и узла управления 14 для натяжения приводного ремня 40.
Ведомый элемент или каретка 50 содержит продольный элемент 51, снабженный парой разнесенных друг от друга в продольном направлении ведомых шкивов 52 и 53, установленных с возможностью вращения относительно него. На переднем выступе 54 продольного элемента 51 установлены соединительные средства общеизвестного типа для присоединения троса управления 55 к каретке путем намотки троса управления 55 вокруг винтовой поверхности 59 и закрепления с помощью зажима 60 (см. фиг.9). В данном конкретном варианте выполнения трос управления 55 выходит из каретки 50 через направляющее отверстие 56, предусмотренное на цилиндрической поверхности оси 47, и пропущен вокруг холостого колеса 57 с выходом из корпуса 11 через отверстие 58. Устройство выполнено таким образом, что перемещение каретки 50 в основном по продольной оси корпуса 11 приводит к соответствующему перемещению троса управления 55.
Общее положение приводного ремня 40 показано на фигурах 10 и 11. Приводной ремень проходит от первого ведущего шкива 28 к первому ведомому шкиву 52, от первого ведомого шкива 52 ко второму ведущему шкиву 29, от второго ведущего шкива 29 к первому направляющему шкиву 48, от первого направляющего шкива 48 ко второму ведомому шкиву 53, от второго ведомого шкива 53 ко второму направляющему шкиву 49 и от второго направляющего шкива 49 обратно к первому ведущему шкиву 28. Приводной ремень 40 образует первую петлю между первым ведомым шкивом 52 и ведущими шкивами 28, 29 и вторую петлю между вторым ведомым шкивом 53 и направляющими шкивами 48, 49, при этом вращение ведущих шкивов 28, 29 в первом направлении приводит к увеличению длины первой петли и соответствующему уменьшению длины второй петли.
Как более четко видно на фиг.2, ось вращения первого ведомого шкива 52 расположена под углом относительно (общей) оси вращения ведущих шкивов 28 и 29. Это обеспечивает возможность соосного расположения траектории приводного ремня 40 и обоих ведущих шкивов 28 и 29, не требующего поперечного смещения или деформации ремня.
Как видно также из фиг.2, ведомый шкив 52 установлен и выполнен с таким размерами, что центральная ось 90 приводного ремня 40, то есть центральная ось продольных волокон материала приводного ремня в точке, где приводной ремень подходит и отходит от ведомого шкива 52, с точностью соответствует положению центральной оси 90 приводного ремня 40 в точках, где ремень отходит или подходит к ведущим шкивам 28 и 29 соответственно. Разумеется, что ремень 40 перекручивается по мере своего перемещения между ведущими шкивами 28, 29 и ведомым шкивом 52, но это перекручивание происходит вокруг центральной оси 90 волокон ткани ремня. Общепризнано, что приводной ремень этого типа с меньшей вероятностью подвержен повреждению или разрушению, если его перекручивание происходит относительно центральной оси, чем это проявлялось бы в случае его перекручивания относительно какой-либо иной оси, и/или если бы требовалось его перемещение или деформация в поперечном направлении.
Понятно, что точное соответствие положения осей ведомого и ведущих шкивов и траектории приводного ремня не является необходимым требованием, это же касается и точного соответствия положения центральной оси приводного ремня при его отходе или подходе к ведомому шкиву и ее положения при подходе или отходе ремня от ведущего шкива, но чем больше расхождение, тем больше вероятность повреждения или разрушения ремня, поэтому существенное соблюдение соответствия является предпочтительным, а точное его соблюдение является идеальным вариантом.
Взаимное расположение ведомого шкива 53 и направляющих шкивов 48, 49 такое же, как показано на фиг.2, так что приводной ремень 40 только подвергается перекручиванию относительно своей центральной оси на протяжении всей траектории своего движения независимо от положения каретки 50. Хотя идеальное взаимное расположение шкивов конкретно описано для варианта выполнения, соответствующего фигурам с 1 по 11, взаимное расположение шкивов в других вариантах выполнения, представленных на фигурах, является подобным образом идеальным, хотя и в этих вариантах шкивы также могут быть скорее расположены с существенным, чем с точным соблюдением соответствия осей, если это необходимо.
В вариантах выполнения, где вместо приводного ремня 40 используется цепь, трос или подобные средства, может поддерживаться существенное или точное соответствие расположения осей шкивов, хотя положение оси, вокруг которой при идеальных условиях должна перекручиваться цепь, трос или подобное средство, может зависеть от строения этого компонента.
Следует понимать, что посредством натяжения приводного ремня 40 каретку 50 можно фактически подвесить между узлом шкива 45 и электродвигателем и узлом управления 14. Это создает преимущество, заключающееся в уменьшении сил трения в исполнительном механизме, которые в противном случае имели бы место при перемещении каретки по рельсам. В альтернативном варианте осуществления настоящего изобретения, если не может поддерживаться натяжение бесконечных приводных средств, или существует необходимость регулирования вибрации ремня, могут быть предусмотрены рельсы для направления и/или опоры для каретки.
Работающий электродвигатель 19 приводит во вращение приводную червячную шестерню 21. Приводная червячная шестерня 21 взаимодействует с червячным колесом 27 и передает вращение на каждый из ведущих шкивов 28 и 29. Поскольку ведущий шкив 29 снабжен зубьями, количество которых на один зуб больше, чем у ведущего шкива 28, вращение каждого шкива при одном полном обороте обеспечивает продвижение части приводного ремня 40, навитой на шкив 29, на большее расстояние, чем части приводного ремня 40, навитой на шкив 28, на шаг одного зуба. Это приведет к увеличению длины первой петли ремня (между ведущими шкивами и ведомым шкивом 52) на шаг зубьев и соответствующему увеличению расстояния между ведущими шкивами 28, 29 и кареткой 50 на половину шага зубьев. Соответственно подача приводного ремня 40 от направляющего шкива 48 будет происходить более быстро благодаря наматыванию на ведущий шкив 29, при этом будет происходить соответствующее уменьшение длины второй петли (между направляющими шкивами 48, 49 и ведомым шкивом 53), в результате чего каретка 50 будет притягиваться ко второму концу 13 корпуса 11, таким образом обеспечивая фактическое увеличение длины троса управления 55 за пределами корпуса 11.
Изменение направления вращения электродвигателя 19 изменяет в обратную сторону описанные выше размеры двух петель, в результате чего каретка перемещается вдоль корпуса в направлении электродвигателя 19, одновременно обеспечивая натяжение троса управления 55 и/или втягивая его в корпус.
В обычном исполнительном механизме с ременным приводом, использующим, например, ремень, на котором выполнены зубья с шагом пять миллиметров, и ведущий шкив с 20 зубьями для того, чтобы получить скорость линейного перемещения каретки 250 мм в секунду, на ведущем шкиве потребуется скорость вращения 150 об/мин. Чтобы развить такую скорость вращения с помощью электродвигателя, работающего обычно при 6000 об/мин, потребуется коробка передач с передаточным отношением 40:1. Если коробка передач создает «мертвый» ход в один градус, это приведет к линейной потере хода при величине линейного «мертвого» хода 0,28 мм. Кроме того, любые зазоры между зубьями шкива и приводным ремнем также проявятся в виде линейного «мертвого» хода при реверсировании привода.
В варианте осуществления изобретения, описанном выше, если на первом ведущем шкиве 28 выполнено девятнадцать зубьев, а на втором ведущем шкиве 29 - двадцать зубьев, при этом зубья выполнены с шагом 5 мм, линейное перемещение каретки 50 за один оборот общей оси 26 составит 2,5 мм. Поскольку требуемая линейная скорость составляет 250 мм в секунду, она может быть получена при использовании прямого привода оси 26 посредством электродвигателя, создающего вращение со скоростью 100 оборотов в секунду или 6000 об/мин (то есть не требуется редуцирование, создаваемое червячной шестерней 21).
Следует понимать, что благодаря топологии приводного ремня 40 и ведомых шкивов 52, 53 натяжение будет поддерживаться при всех положениях каретки 50 и с учетом качества имеющихся в продаже приводных ремней и шкивов исполнительный механизм в соответствии с настоящим изобретением может быть выпущен экономичным, то есть фактически без «мертвого» хода.
В альтернативном варианте исполнения привода с обратным изгибом, представленном на фиг.12, ведущие шкивы 28, 29 (с разностью в один зуб) зафиксированы для совместного вращения с входным приводным валом 26. Эти шкивы 28, 29 и приводной вал 26 установлены на каретке 88 вместе с ведомыми шкивами 52, 53, 84 и 85, каждый из которых свободно вращается на соответствующих подшипниках. Приводной ремень 40 проходит от первого ведущего шкива 28 к первому ведомому шкиву 52, от первого ведомого шкива 52 к первому направляющему шкиву 48, от первого направляющего шкива 48 к третьему ведомому шкиву 84, от третьего ведомого шкива ко второму ведущему шкиву 29, от второго ведущего шкива к четвертому ведомому шкиву 85, от четвертого ведомого шкива 85 ко второму направляющему шкиву 49, от второго направляющего шкива 49 ко второму ведомому шкиву 53, и от второго ведомого шкива 53 обратно к первому ведущему шкиву 28.
Каретку 88 поддерживают блоки подшипников 87, которые смонтированы на рельсах 86, для обеспечения возможности линейного перемещения по рельсам. Расположение приводного ремня показано на фиг.13, при этом приводным ремнем 40 образована первая петля между первым направляющим шкивом 48 и первым и третьим ведомыми шкивами 52, 84, и вторая петля между вторым направляющим шкивом 49 и вторым и четвертым ведомыми шкивами 53, 85. Вращение приводного вала 26 и шкивов 28, 29 в первом направлении приводит к увеличению длины первой петли и соответствующему уменьшению длины второй петли, что приводит к перемещению каретки 88 по рельсам 86. Вращение приводного вала 26 в противоположном направлении приводит к изменению направления перемещения.
Этот вариант исполнения обладает преимуществом по сравнению с первым вариантом линейного исполнительного механизма, заключающимся в том, что для заданной длины приводного ремня он обеспечивает большее перемещение и является соответственно более жестким.
Для этого варианта исполнения требуется установка приводного электродвигателя (не показан) на каретке 88, что также является преимуществом в некоторых случаях применения.
Вариант исполнения, представленный на фигурах 12-17, также поясняет, что изобретение подходит для использования в линейном исполнительном механизме, где возможно любое направление действия усилий на каретку 88, и управление положением каретки может проводиться практически без "мертвого" хода.
В альтернативном варианте исполнения, представленном на фигурах 18-20, ведущие шкивы 28 и 29 каждый в отдельности установлены с возможностью вращения на осях 61 и 62 соответственно и выполнены с одинаковым количеством зубьев (хотя в других вариантах число зубьев может отличаться на один или более). На каждой из осей 61 и 62 установлены зубчатые колеса 63 и 64 соответственно, при этом количество зубьев на зубчатых колесах 63 и 64 отличается на один зуб (хотя в других вариантах исполнения оно может быть одинаковым или отличаться на величину большую, чем один зуб). Шестерни введены в зацепление друг с другом, поэтому вращение оси 61 передается на ось 62 в противоположном направлении. Это обеспечивает возможность прохождения приводного ремня 40 вокруг ведущих и ведомых шкивов без использования каких-либо направляющих шкивов, необходимых для реверсирования или изменения траектории приводного ремня.
Приводной ремень 40 проходит от первого ведущего шкива 28 к первому ведомому шкиву 70, от первого ведомого шкива 70 ко второму ведущему шкиву 29, от второго ведущего шкива 29 ко второму ведомому шкиву 72 и от второго ведомого шкива 72 обратно к первому ведущему шкиву 29. Приводной ремень 40 образует первую петлю между первым ведомым шкивом 70 и ведущими шкивами 28, 29, и вторую петлю между вторым ведомым шкивом 72 и ведущими шкивами 28, 29. При этом вращение ведущих шкивов в одном направлении приводит к увеличению длины первой петли и соответственно к уменьшению длины второй петли.
В отличие от описанных ранее вариантов выполнения окружности соответствующих шкивов 28, 29 (и соответственно количество зубьев, если это зубчатые шкивы) одинаковые. Однако из-за разного количества зубьев шестерен 63 и 64 существует соответствующее различие относительных скоростей вращения шкивов 28 и 29, обеспечивающее различные окружные скорости на шкивах 28, 29 и вследствие этого получение результата подобного результату для более ранних вариантов.
Следует отметить, что различные окружные скорости шкивов 28, 29 и вследствие этого различные линейные скорости ведомых элементов или U-образных элементов 71, 73 могут быть получены для заданной входной скорости вала 61 путем изменения различия в количестве зубьев шестерен 63 и 64 путем изменения количества зубьев на шкивах 28 и 29 или и тем и другим способом.
Смещение U-образного элемента 73 за один оборот вала 61 равно (t1/t2·T2/T1)/2, где t1 и t2 - количество зубьев на шестернях 63 и 64 соответственно, а Т1 и Т2 - количество зубьев на шкивах 28 и 29.
U-образные элементы 71, 73 взаимно соединены посредством второй петли 74 ремня, которая проходит вокруг шкива 71. Принцип работы этого варианта выполнения такой же, как и описанный выше, но в этом случае ведомыми элементами являются первый и второй U-образные элементы 71 и 73 соответственно. Еще одно преимущество этой конструкции заключается в том, что два ведомых элемента могут представлять собой раздельные средства управления для двух отличающихся, но связанных функций, поскольку каждый ведомый элемент перемещается в противоположном направлении при соответствующем движении ведущего вала 61. Следует отметить, что этот вариант можно использовать для получения точного вращательного движения шкива 81 и второй петли 74 ремня.
Для рук-манипуляторов, приводимых в движение тросом или кабелем, при этом управляющие тросы или кабели используются для управления сгибом секций, может быть использован единственный исполнительный механизм для двух противоположных кабелей путем удаления второй петли 74 ремня и связанного с ней шкива и использования управляющих тросов вместо второй петли 74 ремня для обеспечения необходимого натяжения узла. На фиг.21 представлено устройство, в котором вторая петля 74 ремня заменена управляющими тросами 55а, 55b.
Компоновка ведущих и ведомых шкивов, представленная на фигурах 18-21, таким образом может быть использована во вращательном исполнительном механизме (для обеспечения регулируемого вращения шкива 81) или в линейном исполнительном механизме (для обеспечения регулируемого перемещения ведомых элементов 71, 73 или элементов, подсоединенных к управляющим тросам 55а, 55b).
Конструкция, представленная на фигурах 22-26, является вариантом выполнения, изображенного на фигурах 18-21, в котором центральный ведущий вал 80 предназначен для приведения в движение первого ведущего шкива 28 и второго ведущего шкива 29 (при разности в количестве зубьев для этого варианта выполнения, равной одному зубу). Приводной ремень 40 проходит от первого ведущего шкива 28 к первому направляющему шкиву 48, от первого направляющего шкива 48 к первому ведомому шкиву 70, от первого ведомого шкива 70 ко второму ведущему шкиву 29, от второго ведущего шкива 29 ко второму ведомому шкиву 72, от второго ведомого шкива 72 ко второму направляющему шкиву 49 и от второго направляющего шкива 49 обратно к первому ведущему шкиву 28.
Приводной ремень 40 образует первую петлю между первым ведомым шкивом 70 и вторым ведущим шкивом 29 и первым направляющим шкивом 48, и вторую петлю между вторым ведомым шкивом 72 и вторым ведущим шкивом 29 и вторыми направляющими шкивами 49, при этом вращение ведущих шкивов 28, 29 в одном направлении приводит к увеличению длины первой петли и соответствующему уменьшению длины второй петли.
Ведомые элементы или U-образные элементы 71, 73 обеспечивают крепление к ремню 74 посредством устройств натяжения 82, 83 для обеспечения натяжения вокруг шкива 81, что позволяет получить регулируемое вращение шкива 81. Этот вариант выполнения обладает преимуществом, заключающимся в минимальном перекручивании ремня и получении низкопрофильной конструкции.
Варианты выполнения, представленные на фигурах 18-20 и 22-26, также поясняют, что изобретение может быть использовано во вращательном исполнительном механизме, в котором направление крутящего момента на шкиве может быть любым, а угловое положение шкива может быть отрегулировано практически при исключении «мертвого» хода.
Описанные выше исполнительные механизмы дополнительно предлагают возможность создания значительного усилия на тросе управления 55 или каретке 88, или значительного крутящего момента на шкиве 81 при использовании электродвигателя относительно малой мощности. В предпочтительном варианте осуществления изобретения, где используется червячная шестерня, такая как 21, выигрыш в силе ведущего звена червячной передачи 21 и червячного колеса 27 является значительным. Выигрыш в силе для устройства шкива в соответствии с настоящим изобретением проявляется в том смысле, что каретка будет перемещаться на половину шага одного зуба при полном обороте червячного колеса 27. В этом случае опять-таки имеет место значительный выигрыш в силе.
Специалистам ясно, что изменение величины выигрыша в силе можно достичь за счет изменения шага зубьев на приводном ремне 40 и на ведущих шкивах 28/29 и/или, как вариант, просто за счет изменения разницы в количестве зубьев на ведущих шкивах. Дальнейшие изменения могут быть получены путем установки дополнительного шестеренчатого редуктора в кинематической цепи между электродвигателем 19 и выходным валом 20, но, как указано выше, это приведет к увеличению стоимости и, в общем случае, не является предпочтительным.
Подразумевается, что в некоторых из описанных вариантов выполнения приводной ремень 40 изогнут вокруг ведущих шкивов, ведомых шкивов и направляющих шкивов (если они имеются) в одном и том же направлении, то есть в сторону зубьев ремня. Специалистам ясно, что это позволяет (в применимых вариантах выполнения) уменьшить размеры шкивов по сравнению с вариантами выполнения, в которых предусмотрен привод с обратным изгибом.
Настоящим заявителем обнаружено, что исполнительные механизмы описанного выше типа обеспечивают отличное управление сегментированными механическими руками-манипуляторами типа, описанного, например, в международных заявках на патент WО 2002/016995 и WО 2002/100608. Эти исполнительные механизмы позволяют использовать относительно маломощные электродвигатели для создания значительных усилий на тросах управления такими руками-манипуляторами, а их относительная компактность обеспечивает возможность установки группы исполнительных механизмов в непосредственной близости с рукой, при небольшом дополнительном пути перемещения тросов управления 55.
Реферат
Настоящее изобретение относится к исполнительному механизму, в частности к исполнительным механизмам линейного и вращательного движения, используемым для управления механическими руками-манипуляторами. Исполнительный механизм содержит первый и второй ведущие шкивы, сблокированные для совместного вращения, первый и второй ведомые шкивы, бесконечный приводной ремень, взаимодействующий с первым и вторым ведущими шкивами, и с первым и вторым ведомыми шкивами, электродвигатель, подключенный для приведения во вращательное движение первого и второго ведущих шкивов и перемещения бесконечного приводного ремня, ведомый элемент, поддерживающий, по меньшей мере, один из ведомых шкивов. Первый и второй ведущие шкивы выполнены таким образом, что при их вращении окружная скорость первого ведущего шкива отличается от окружной скорости второго ведущего шкива, а бесконечный приводной ремень проходит вокруг ведущих и ведомых шкивов таким образом, что разность между окружными скоростями первого и второго ведущих шкивов вызывает перемещение приводного элемента. При этом первый и второй ведущие шкивы установлены на общей оси. Изобретение снижает или исключает необходимость в коробке передач между электродвигателем и ведущим шкивом при использовании в условиях малых и средних скоростей, а также обеспечивает практическое отсутствие «мертвого» хода. 7 з.п. ф-лы, 26 ил.
Комментарии