Устройство для передачи движения посредством противовращения противоположных концов изогнутого гибкого элемента - RU2614995C2
Код документа: RU2614995C2
Чертежи




Описание
Перекрестная, ссылка на родственную заявку
Данная заявка испрашивает приоритет предварительной заявки США №61/612348, поданной 18 марта 2012 г. и включенной в настоящий документ посредством ссылки.
Область техники
Настоящее изобретение относится к устройству для передачи движения посредством противовращения противоположных концов гибкого упругого элемента и, конкретнее, для передачи движения гибкому элементу относительно, например, столбчатой конструкции с целью применения, таким образом, гибкого элемента для поднятия/опускания прикрепленных к нему элементов вдоль продольной оси столбчатой конструкции.
Уровень техники
Существует множество ситуаций, когда возникает необходимость перемещения "груза" вдоль столбчатой конструкции. Например, различные операции по техническому обслуживанию и строительству требуют поднятия деталей на столбы или лестницы (например, установка камер на столбы, замена ламп при высоких потолках, закрепление оборудования беспроводной связи на вышках и т.д.). Разнорабочим часто самим приходится залазить на столбы и выполнять установку и ремонтные работы на высоте. Деятельность, связанная с отдыхом и развлечениями, также может требовать перемещения людей или оборудования на высоту по столбчатой конструкции (например, при поднятии охотничьей вышки на дерево).
На уровне техники существует множество устройств для выполнения таких функций. Эти устройства могут требовать большого количества подвижных деталей, или могут быть не особенно хорошо приспособлены для различных других целей; то есть в каждой отдельной ситуации требуется разрабатывать отдельное, уникальное устройство для перемещения грузов вдоль конкретных видов столбчатых конструкций.
Устройства, известные из уровня техники, сконструированные для применения со столбчатыми конструкциями неправильных форм (например, деревьев), сконфигурированы для концентрации усилия нагрузки на минимальном количестве точек контакта. В результате тяговое усилие, обусловленное таким устройством, ограничено и может приводить к повреждению дерева или другой подобной конструкции.
Различные системы, известные из уровня техники, требуют включения некоего рода "тормоза" или применения наземных ограждений. В противном случае, при несрабатывании тормозного устройства, результаты могут быть катастрофическими.
Для устройств, применяемых в городских условиях (например, при поднятии беспроводного оборудования на опору телефонной линии), используются отдельные опорные системы, и требуется большой фронт работ (включая, например, использование грузового автомобиля), что часто приводит к перекрытию дорожного движения на площади, окружающей место выполнения работ.
Кроме того, многие известные из уровня техники устройства имеют очень сложные конфигурации с большим количеством отдельных элементов, что в результате приводит к дорогостоящим решениям, которые часто являются очень тяжелыми и могут иметь высокую вероятность возникновения аварийной ситуации.
Сущность изобретения
Для удовлетворения потребностей, существующих на уровне техники, было предложено настоящее изобретение, относящееся к устройству для передачи движения посредством противовращения противоположных концов гибкого упругого элемента и, конкретнее, для передачи движения гибкому элементу относительно, например, столбчатой конструкции с целью применения, таким образом, гибкого элемента для поднятия/опускания прикрепленных к нему элементов вдоль продольной оси столбчатой конструкции.
В одном частном варианте осуществления настоящее изобретение описывает устройство для передачи поступательного перемещения грузу относительно столбчатой конструкции, представляющее собой по меньшей мере один гибкий упругий элемент (например, амортизирующий трос), расположенный таким образом, чтобы окружать часть конструкции. Платформа (или другой подходящий контейнер для груза) соединена с противоположными концами гибкого упругого элемента. Платформа используется для удержания груза, и концы гибкого элемента соединены с платформой таким образом, чтобы концы могли свободно вращаться. Таким образом, приложение усилий противовращения к оконечным частям этих противоположных концов будет сообщать растягивающее усилие гибкому упругому элементу, что в конечном итоге заставляет гибкий элемент прокручивается для снятия напряжения. При дальнейшем приложении усилий противовращения гибкий элемент будет продолжать прокручиваться и продвигаться, совершая поступательное движение, вдоль столбчатой конструкции.
Другие и дополнительные характеристики и преимущества настоящего изобретения будут очевидны при прочтении следующего описания со ссылкой на прилагаемые графические материалы.
Краткое описание графических материалов
Обратимся к графическим материалам, в которых подобные номера ссылок обозначают подобные элементы на нескольких видах:
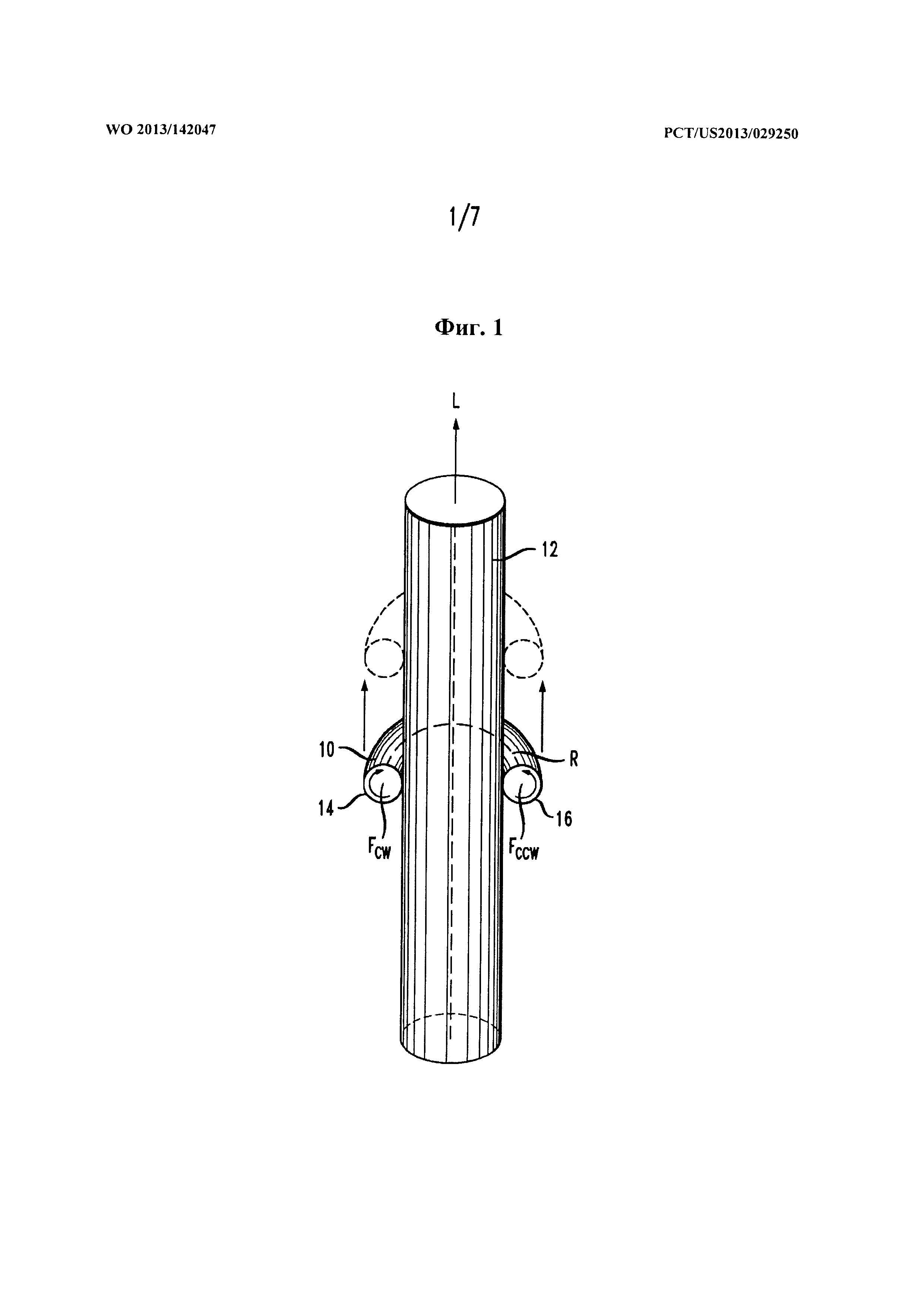
на фиг. 1 - вид в изометрии иллюстративного гибкого элемента и столбчатой конструкции, показанный для лучшего понимания принципов настоящего изобретения;
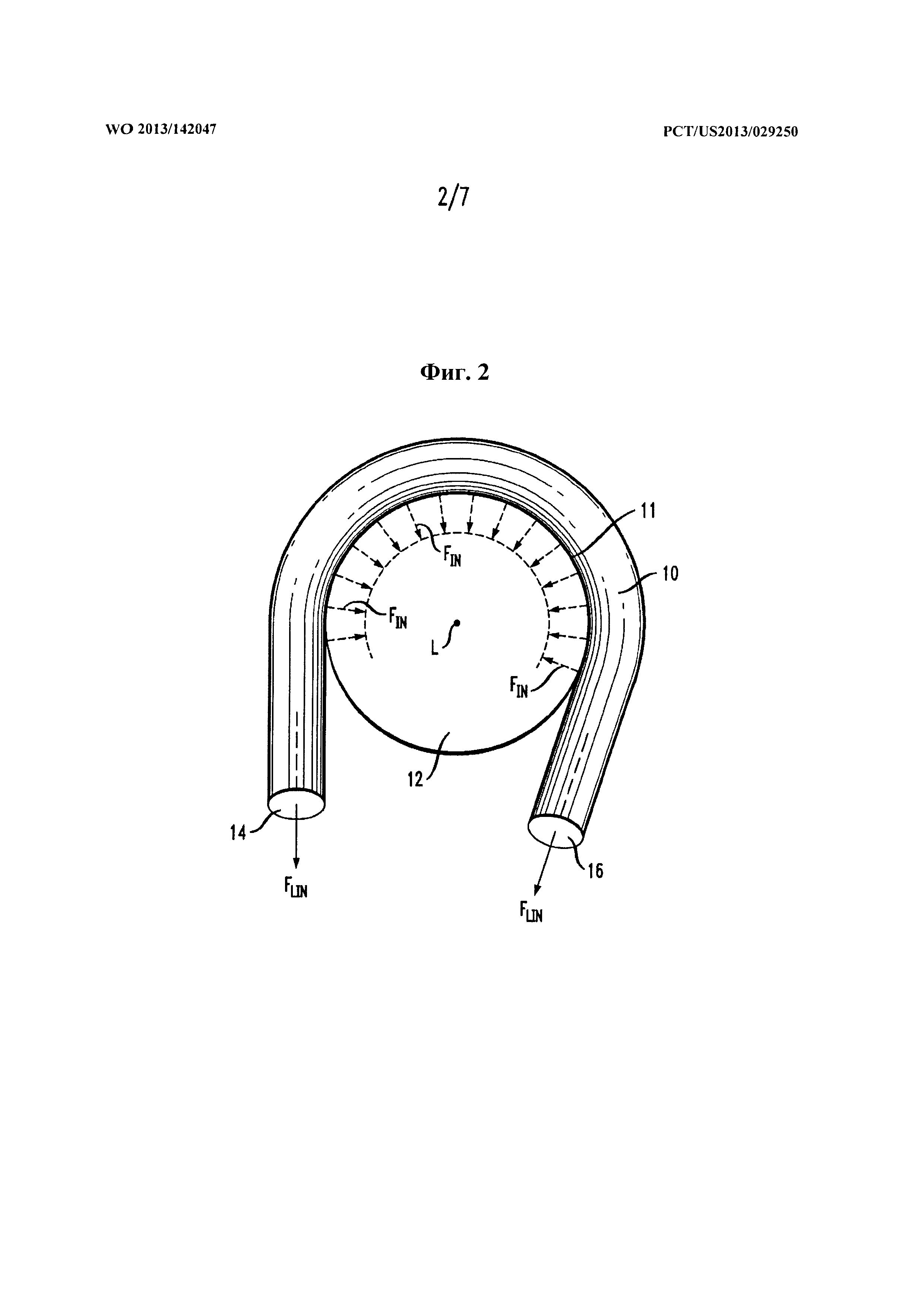
на фиг. 2 - вид сверху устройства по фиг. 1;
на фиг. 3 - вид в изометрии части фиг. 1, иллюстрирующий расположение линии напряжения вдоль гибкого элемента относительно столбчатой конструкции;
на фиг. 4 - вид устройства, показанного на фиг. 3, в данном случае при приложении к гибкому элементу усилий противовращения и соответствующем перемещении линии напряжения;
на фиг. 5 проиллюстрирован другой вариант осуществления настоящего изобретения, в данном случае связанный с обеспечением относительно горизонтального движения между гибким элементом и столбчатой конструкцией;
на фиг. 6 проиллюстрировано все устройство с применением свойств поступательного движения гибкого элемента, в данном случае иллюстрирующее движение закрепленной платформы вдоль столбчатой конструкции;
фиг. 7 - вид сбоку платформы по фиг. 6;
фиг. 8 - вид спереди платформы по фиг. 6;
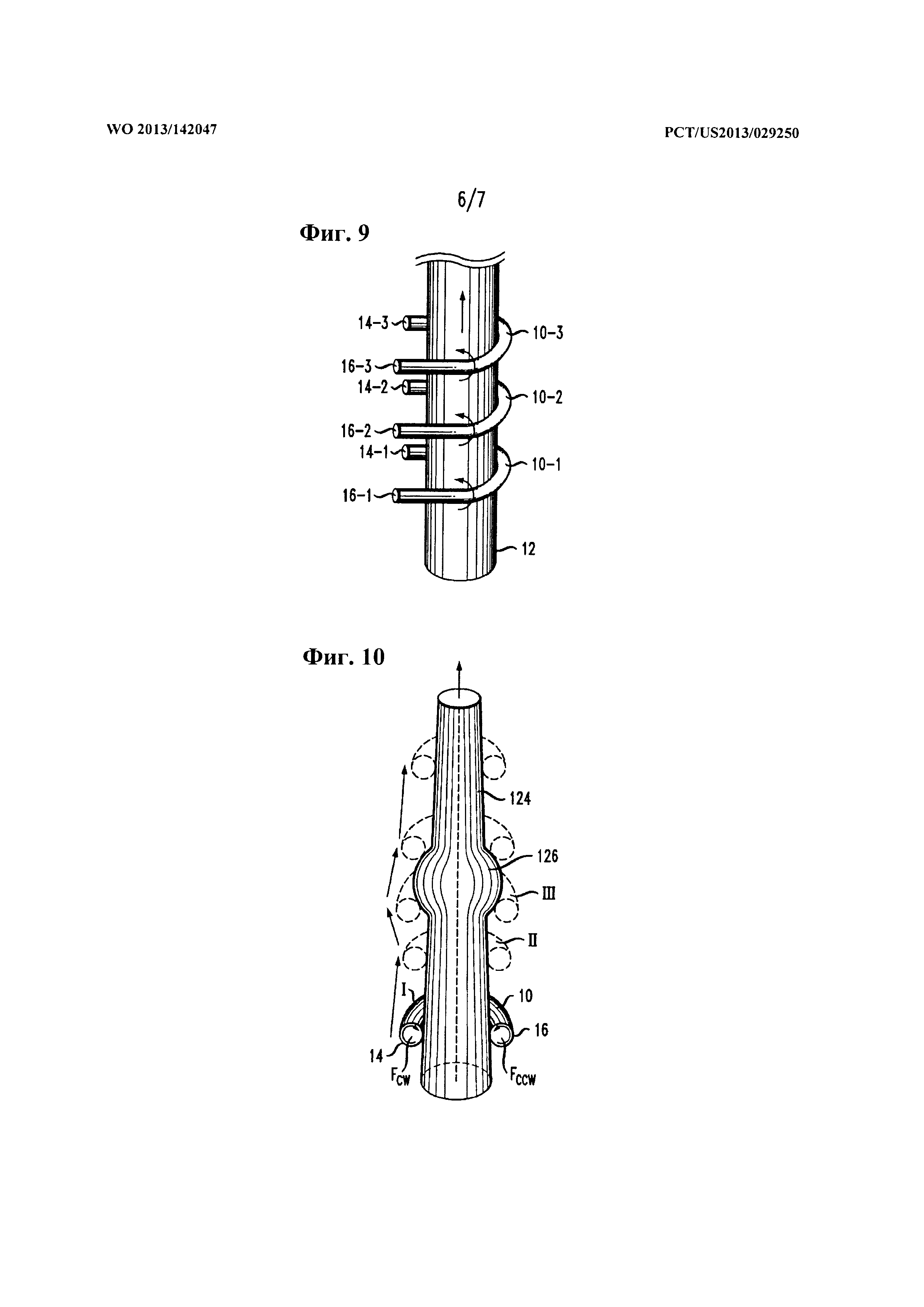
на фиг. 9 проиллюстрирован другой вариант осуществления настоящего изобретения, в данном случае с использованием нескольких гибких элементов, применяемых в совокупности, для обеспечения движущей силы для прикрепленного груза (груз не показан на данном изображении);
на фиг. 10 проиллюстрирована способность гибкого элемента согласно настоящему изобретению обеспечивать поступательное движение вдоль столбчатой конструкции неправильной формы; и
на фиг. 11 показано еще одно устройство с применением настоящего изобретения, и в данном случае столбчатая конструкция имеет тороидальную форму, и, таким образом, гибкий элемент передает вращательное движение платформы вокруг тороида.
Подробное описание изобретения
Согласно настоящему изобретению приложение усилий противовращения (крутящего момента) к противоположным концам гибкого элемента, расположенного вокруг по меньшей мере части столбчатой конструкции, создает спиральный крутящий момент вдоль изогнутого (то есть в виде дуги) гибкого элемента. Как будет более подробно объясняться ниже, этот спиральный крутящий момент затем превращается в линейное перемещение гибкого элемента (относительно продольной оси столбчатой конструкции).
Фиг. 1 представляет собой базовую упрощенную схему, иллюстрирующую принципы настоящего изобретения. В этом иллюстративном устройстве гибкий элемент 10 расположен таким образом, чтобы окружать часть столбчатой конструкции 12. Гибкий элемент 10 может содержать, например, амортизирующий трос, отрезок каната (или другого волокнистого материала) с достаточной упругостью, чтобы реагировать на крутящий момент, состоящую из сегментов систему передачи, наподобие цепи, или пружину, при этом система передачи или пружина обладает достаточной упругостью для реакции на крутящий момент. Действительно, пружина может быть выполнена в виде дуги, как показано на фиг. 1. Независимо от выбора конкретного материала для гибкого элемента 10, его важным качеством является способность реагировать на прикладываемый к нему путем вращения крутящий момент. Хоть это и не показано отдельно на фиг. 1, следует понимать, что гибкий элемент 10 должен находиться в напряженном состоянии относительно столбчатой конструкции 12. То есть между оконечными частями 14 и 16 концов гибкого элемента 10 предусмотрено некое средство фиксации (например, защелка, сцепка и т.д.) для удержания элемента 10 на месте на столбчатой конструкции 12. Этот элемент является особенно предпочтительным, как описано ниже, для сообщения гибкому элементу 10 "тормозного" усилия, предотвращающего соскальзывание гибкого элемента 10, когда он находится без движения.
Согласно фиг. 1 будет описана способность передавать гибкому элементу 10 движение относительно столбчатой конструкции 12. В частности, как показано, к первой оконечной части 14 конца приложено вращательное усилие FCW в направлении часовой стрелки, тогда как ко второй оконечной части 16 конца одновременно приложено вращательное усилие FCCW в направлении против часовой стрелки. Эти вращательные усилия будут продолжать накапливать потенциальную энергию в поперечном направлении гибкого элемента 10 (то есть вдоль радиуса R кривизны) по мере действия прикладываемого усилия. В данный момент времени происходит превышение крутящего момента гибкого элемента 10, приводящее к "прокручиванию" гибкого элемента 10, превращая накопленную потенциальную энергию в кинетическую энергию, выраженную в поступательном движении гибкого элемента 10 относительно продольной оси А столбчатой конструкции 12.
То есть при приложении усилия в направлении по часовой стрелке к оконечной части 14 конца и против часовой стрелки к оконечной части 16 конца высвобождение кинетической энергии приведет к поступательному движению гибкого элемента 10 вверх, как показано стрелками на фиг. 1, поступательно перемещающему гибкий элемент 10 на новое место, как показано пунктиром. Как было описано, гибкий элемент 10 не просто "поступательно перемещается", сохраняя свою прежнюю ориентация, а снятие крутящего момента приводит к тому, что гибкий элемент, по сути, "прокручивается", вызывая движение вверх.
При расходовании кинетической энергии, связанной с поступательным перемещением на новое место, гибкий элемент 10 снова находится в состоянии "покоя", в котором в нем больше не остается энергии. Таким образом, приложение усилий к оконечным частям 14, 16 конца, как было описано выше, снова будет приводить к накапливанию в гибком элементе 10 потенциальной энергии, до тех пор, пока снова не произойдет превышение, и гибкий элемент 10 снова не "прокрутится" вверх, поступательно перемещаясь вдоль продольной оси L столбчатой конструкции 12 в новое положение. Предпочтительно такое устройство согласно настоящему изобретению обеспечивает естественный "тормоз" для предотвращения сползания гибкого элемента 10 вниз в отсутствие прикладываемых усилий противовращения на оконечных частях концов гибкого элемента.
Следует понимать, что несмотря на то, что вышеописанное объяснение описывает приложение вращательного усилия в направлении по часовой стрелке к первой оконечной части 14 конца и против часовой стрелки ко второй оконечной части 16 конца, для перемещения гибкого элемента 10 вниз может быть использовано устройство, работающее в обратном направлении. То есть вращательное усилие, направленное против часовой стрелки, может быть приложено к первой оконечной части 14 конца, а вращательное усилие, направленное по часовой стрелке, может быть приложено ко второй оконечной части 16 конца. Поскольку прикладываемые в паре усилия являются усилиями противовращения, гибкий элемент 10 будет поступательно перемещаться в продольном направлении относительно столбчатой конструкции 12. Таким образом, будет понятно, что непрерывное приложение усилий противовращения (то есть как по часовой стрелке, так и против часовой стрелки) приведет к непрерывному движению гибкого элемента 10 относительно столбчатой конструкции 12.
Фиг. 2 является видом сверху устройства по фиг. 1, иллюстрирующим конкретные усилия, направленные на обеспечение поступательного движения гибкого элемента относительно столбчатой конструкции. В частности, на фиг. 2 показана обширная область контакта между гибким элементом 10 и столбчатой конструкцией 12, показанная заштрихованным участком 11 гибкого элемента 10. Распределенное усилие Fin, направленное внутрь, как показано вдоль области 11 контакта, является результатом линейных напряжений, создаваемых посредством удерживания гибкого элемента 10 в напряженном состоянии относительно столбчатой конструкции 12, как было указано выше. Такое линейное напряжение обозначено как FLIN на оконечных частях 14 и 16. Действительно, это линейное напряжение является усилием, удерживающим гибкий элемент 10 на месте в отсутствие прикладываемых усилий противовращения. Благодаря такой относительно обширной области контакта между гибким элементом 10 и столбчатой конструкцией 12 (то есть заштрихованный участок 11) линейное напряжение будет действовать в качестве усилия "торможения" и будет сохранять положение гибкого элемента 10 на столбчатой конструкции 12.
Согласно настоящему изобретению и как подробно описано далее распределенное усилие Fin при вращении становится движущей силой, приводящей к "прокручиванию" гибкого элемента 10 и позволяющей гибкому элементу 10 совершать поступательное движение относительно столбчатой конструкции 12.
На фиг. 3 и 4 также проиллюстрировано применение этих усилий вдоль гибкого элемента 10 для приведения его в движение относительно столбчатой конструкции 12. В частности, на фиг. 3 показан гибкий элемент 10 в "ослабленном" состоянии на своем месте относительно столбчатой конструкции 12. Это может быть состояние непосредственно после прокручивания гибкого элемента 10 или его начальное состояние перед тем, как были приложены усилия противовращения. Линия 36 вдоль гибкого элемента 10 определяет линию напряжения и показывает, что эта линия ортогональна столбчатой конструкции 12, указывая на присутствие в гибком элементе 10 только усилий линейного напряжения.
На фиг. 4 показано искажение линии 36 напряжения, когда усилия FCW и FCCW приложены к оконечным частям 14, 16 концов гибкого элемента 10. Действительно, изогнутая центральная область линии 36 напряжения иллюстрирует повышение направленного внутрь растягивающего усилия Fin, где оно оказывает сопротивление столбчатой конструкции 12. Это искажение показывает равномерно распределенный и выровненный по дуге запас потенциальной энергии, минимизирующий усилие максимального крутящего момента, требуемое для приведения гибкого элемента 10 в движение вдоль столбчатой конструкции 12 и, наконец, обеспечивающий превышение крутящего момента, высвобождая потенциальную энергию и приводя к прокручиванию и перемещению гибкого элемента 10.
Несмотря на то, что конкретное устройство по фиг. 1 иллюстрирует столбчатую конструкцию 12 как расположенную в вертикальном направлении, это следует рассматривать только в качестве примера. Действительно, столбчатая конструкция 12 может быть расположена в горизонтальном направлении с управлением движения гибкого элемента 10 влево или вправо посредством приложения усилий противовращения. На фиг. 5 показан вариант осуществления настоящего изобретения. В этом случае вращательное усилие FCCW в направлении против часовой стрелки приложено к первой оконечной части 14 конца, тогда как ко второй оконечной части 16 конца приложено вращательное усилие FCCW в направлении по часовой стрелки, что приводит к перемещению столбчатой конструкции 120 вправо относительно гибкого элемента 10. В любом случае будет осуществляться относительное движение между двумя элементами (гибким элементом и столбчатой конструкцией), при этом в движении может находиться любой элемент. Очевидно, могут быть выполнены другие ориентации столбчатой конструкции 12 (например, под углом 45° относительно горизонта) без влияния на возможность использования гибкого элемента 10 для перемещения вдоль нее.
Следует отметить, что в конкретном варианте осуществления, показанном на фиг. 5, столбчатая конструкция 120 выполнена в виде балки квадратного поперечного сечения (в противоположность округлому, цилиндрическому профилю столбчатой конструкции 12 по фиг. 1). Действительно, следует понимать, что столбчатая конструкция может иметь несколько различных форм, включая "естественную"/неправильную столбчатую конструкцию, такую как деревья.
С этим основным пониманием принципов настоящего изобретения становится очевидно, что существует несколько различных применений такого устройства для передачи движения.
На фиг. 6 проиллюстрирован в концептуальной форме вариант осуществления настоящего изобретения, применяемого для поднятия груза вверх вдоль столбчатой конструкции, имеющей форму столба 122. Это вид в изометрии, показывающий иллюстративное устройство для применения гибкого элемента 10 с целью поднятия платформы 20 вверх вдоль столба 122. На фиг. 7 показан вид сбоку платформы 20, выполненный вдоль линии 7-7 по фиг. 6, а на фиг. 8 показан вид спереди платформы 20, выполненный вдоль линии 8-8 по фиг. 6.
Согласно фиг. 6-8 платформа 20 содержит дно 21 и боковую стенку 22. Платформа 20 дополнительно содержит по меньшей мере один элемент поступательного перемещения (в этом случае пару колес 24, 26), прикрепленный с задней стороне боковой стенки 22 с возможностью опоры на столб 122. Согласно данному варианту осуществления настоящего изобретения элемент поступательного перемещения платформы 20 относительно столба 122 обеспечен парой кривошипных ручек 28, 30, прикрепленных (через толщу боковой стенки 22) к оконечным частям 14, 16 концов гибкого элемента 10. Кривошипные ручки 28, 30 предназначены для передачи усилий противовращения гибкому элементу 10, обеспечивая момент поступательного движения согласно приведенному выше описанию. Таким образом, при сочетании поворота ручек по часовой/против часовой стрелки усилие противовращения будет действовать на гибкий элемент 10, в конечном итоге приводя к "прокручиванию" гибкого элемента 10 и его поступательному перемещению вдоль столба 122. Поскольку платформа 20 соединена с гибким элементом 10, платформа 20 будет также поступательно перемещаться, как и любой "груз", помещенный на платформу 20. Следует понимать, что несмотря на то, что в этой конкретной конфигурации для перемещения груза используется платформа, любой другой подходящий тип контейнера или груз сам по себе могут быть соединены с гибким элементом 10 и перемещаться согласно идее настоящего изобретения.
Согласно фиг. 8 показано, что когда кривошипные ручки 28, 30 поворачивают "внутрь" (как показано стрелками "А", когда кривошипную ручку 30 поворачивают по часовой стрелке, а кривошипную ручку 28 поворачивают против часовой стрелки), сообщаемое гибкому элементу 10 натяжение будет приводить к «прокручиванию» гибкого элемента 10 вверх, поднимая платформу 20, как показано стрелкой "вверх" на фиг. 8. И наоборот, когда кривошипные ручки 28, 30 поворачивают "наружу" (как показано стрелкой "В", когда кривошипную ручку 30 поворачивают против часовой стрелки, а кривошипную ручку 38 поворачивают по часовой стрелке), сообщаемое гибкому элементу 10 натяжение будет приводить к «прокручиванию» гибкого элемента 10 вниз, опуская платформу 20, как показано стрелкой "вниз" на фиг. 8.
Несмотря на то, что вариант осуществления, показанный на фиг. 6-8, иллюстрирует использование пары кривошипных ручек для передачи такого усилия противовращения, следует понимать, что может быть использован любой другой подходящий приводной механизм. Например, для создания и обеспечения желаемых усилий противовращения на оконечных частях 14, 16 гибкого элемента 10, например, может применяться мотор на дистанционном управлении. Также вместо конфигурации на дистанционном управлении может быть использовано устройство на тросовом приводе. В целом понятно, что объем настоящего изобретения не предусматривает ограничений для типа устройства, применяемого для приложения усилия к гибкому элементу.
Также, несмотря на то, что вариант осуществления по фиг. 6-8 иллюстрирует применение одного гибкого элемента для осуществления относительного движения между платформой и столбом, в других конфигурациях настоящего изобретения могут использоваться несколько гибких элементов, работающих совместно для перемещения грузов. Устройство, в котором одновременно используется несколько гибких элементов, может иметь различные конфигурации, в том числе с использованием нескольких гибких элементов, прикрепленных к боковой стенке одной платформы, или с прикреплением каждого гибкого элемента к боковой стенке отдельной платформы, или любое сочетание таких конфигураций.
На фиг. 9 показан вид сбоку иллюстративного набора из трех гибких элементов 10-1, 10-2 и 10-3, расположенных на столбе 122, при этом эти три элемента могут быть прикреплены к боковой стенке одной платформы (не показано) и действовать одновременно, обеспечивая более обширное и более интенсивное усилие для поступательного перемещения. Дополнительно считается, что применение нескольких гибких элементов повышает безопасность конструкции, поскольку если один из гибких элементов выходит из строя, остальные элементы способны продолжать поддерживать прикрепленный груз. Предполагается, что для этого варианта осуществления может быть использована одна пара усилий противовращения, при этом одна пара используется для одновременного вращения всех трех гибких элементов. Однако также возможно осуществлять индивидуальное управление каждым гибким элементом посредством отдельно предусмотренной для каждого элемента парой усилий противовращения.
Как было указано выше, одним признаком устройства согласно настоящему изобретению является способность обеспечивать поступательное движение вдоль столбчатой конструкции неправильной формы (такой как дерево). Дерево или любой тип столба может содержать на своей поверхности различные выступы (например, сучок дерева, прикрученная к столбу направляющая и т.д.). Природа движения при "прокручивании" гибкого элемента согласно настоящему изобретению в сочетании с упругостью гибкого элемента позволяет ему адаптироваться к таким неровностям и продолжать поступательное движение.
На фиг. 10 проиллюстрирован аспект настоящего изобретения, показывающий движение вверх гибкого элемента 10 вдоль столба 124, содержащего секцию с наружным утолщение 126. Как и ранее, усилие, действующее по часовой стрелке, прикладывают к оконечной части 14 конца гибкого элемента 10, а усилие, действующее против часовой стрелки, прикладывают к оконечной части 16 конца гибкого элемента 10, что сначала приводит к «прокручиванию» гибкого элемента 10 из положения I в положение II. При этом используется вся кинетическая энергия, и приложение дополнительного усилия по часовой стрелке/против часовой стрелки приводит к следующему прокручиванию гибкого элемента 10 в положение III. Поскольку гибкий элемент 10 также должен растягиваться для приспосабливания к наличию утолщения 126, некоторая часть энергии тратится на это движение, и действительное поступательное движение прикрепленного груза (не показан) в поперечном направлении немного меньше, чем движение из положения I в положение II.
Таким же образом согласно фиг. 10 усилия противовращения прикладывают к гибкому элементу 10, при этом в данном случае может потребоваться дополнительное усилие, способствующее прохождению дополнительного препятствия движению, созданного наличием утолщения 126. Однако в некоторых случаях гибкий элемент 10 будет накапливать достаточное количество усилия, и он будет прокручиваться из положения III в положение IV. Таким образом, беспрепятственно осуществляется поступательное движение.
На фиг. 11 проиллюстрирован еще один вариант осуществления настоящего изобретения, в котором столбчатая конструкция имеет форму тороида вместо линейной конструкции. В этом случае приложение усилий противовращения к оконечным частям 14, 16 гибкого элемента 10 будет обеспечивать поступательное перемещение платформы 20 по окружности конфигурации тороидальной конструкции 130. Перемещение платформы 20 в разные положения показано пунктиром на фиг. 11. Понятно, что использование усилий противовращения, прикладываемых к гибкому элементу, согласно настоящему изобретению приводит к сообщению движения прикрепленной нагрузке во множестве различных вариантов осуществления.
Таким образом, как видно из вышеописанного, устройство согласно настоящему изобретению является фундаментально новым и основано на основном типе приводных устройств. Таким образом, предполагается, что может быть использован любой тип прикрепляемых устройств (таких как вышеописанная "платформа") - действительно, идея настоящего изобретения находит применения при перемещении многих типов грузов посредством, кроме прочего, таких устройств, как мобильные и стационарные подъемники, платформы лифты, установка и обслуживание столбов и трубопроводов, многонаправленные платформы, вместо лестниц, строительных лесов, стремянок, верхолазного оборудования и т.д.
На самом деле, вышеприведенное раскрытие предусмотрено исключительно для описания различных аспектов и признаков настоящего изобретения и не предусмотрено для ограничения в деталях или применениях устройства согласно настоящему изобретению. Все детали, применения и аспекты рассматриваются как включенные в рамки объема и сути настоящего изобретения, как в частности, определено прилагаемой ниже формулой изобретения.
Реферат
Изобретение относится к устройству для передачи движения посредством противовращения противоположных концов гибкого упругого элемента. Устройство для передачи поступательного перемещения грузу относительно столбчатой конструкции в виде по меньшей мере одного гибкого упругого элемента (например, амортизирующего троса), расположенного таким образом, чтобы окружать часть конструкции, и платформы, соединенной с противоположными концами гибкого упругого элемента. Платформа предназначена для удержания груза, и концы гибкого элемента соединены с платформой таким образом, чтобы концы могли свободно вращаться. Таким образом, приложение усилий противовращения к оконечным частям этих противоположных концов будет сообщать растягивающее усилие гибкому упругому элементу, что в конечном итоге заставляет гибкий элемент прокручиваться для снятия напряжения. При дальнейшем прикладывании усилий противовращения гибкий элемент будет продолжать прокручиваться и продвигаться, совершая поступательное движение, вдоль столбчатой конструкции. Техническим результатом является способность обеспечивать поступательное движение вдоль столбчатой конструкции неправильной формы. 2 н. и 8 з.п. ф-лы, 11 ил.
Комментарии