Бесступенчатая коробка передач - RU2499932C2
Код документа: RU2499932C2
Чертежи





















Описание
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
[0001] Область изобретения относится, в общем, к коробкам передач и, в частности, к способам, узлам и компонентам для бесступенчатых коробок передач (БКП).
Описание известных технических решений
[0002] Существуют хорошо известные пути достижения плавно изменяющегося передаточного числа. Обычно механизм для регулирования передаточного числа в БКП известен как вариатор. В клиноременной БКП вариатор состоит из двух регулируемых шкивов, связанных ремнем. Вариатор в однополостной БКП тороидного типа обычно имеет два частично тороидных передаточных диска, вращающихся на валу, и два или более дискообразных силовых роликов, вращающихся на соответствующих осях, перпендикулярных валу, и зажатых между входным и выходным, передаточными дисками. Обычно для вариатора используется система управления, чтобы при работе можно было достичь требуемого передаточного числа.
[0003] Варианты осуществления вариатора, раскрытые в настоящем описании, - это вариаторы сферического типа, в которых используются сферические регуляторы частоты вращения (известные также как силовые регуляторы, шары, сателлиты, сферические шестерни или ролики), каждый из которых имеет наклоняемую ось вращения, которую можно регулировать, чтобы при работе достигать требуемого передаточного числа. Регуляторы частоты вращения распределены на определенном угловом расстоянии между собой в плоскости, перпендикулярной продольной оси БКП. Регуляторы частоты вращения контактируют с одной стороны с входным диском, а с другой - с выходным диском, причем один или оба из которых прикладывают к роликам зажимающее контактное усилие для передачи крутящего момента. Входной диск прикладывает крутящий момент на входном валу при числе оборотов на входном валу к регуляторам частоты вращения. При вращении регуляторов частоты вращения относительно их собственных осей регуляторы частоты вращения передают крутящий момент на выходной диск. Передаточное число по частоте вращения является функцией радиусов точек контакта входного или выходного дисков до осей регуляторов частоты вращения. Передаточное число по частоте вращения регулируется наклоном осей регуляторов частоты вращения относительно оси вариатора.
[0004] В этой отрасли по-прежнему существует потребность в вариаторах и системах управления для них, которые обеспечивают улучшенные эксплуатационные характеристики и управление работой. Варианты осуществления систем и способов, раскрытые в настоящем описании, направлены на удовлетворение этой потребности.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0005] Системы и способы, описанные в настоящем описании, имеют несколько отличительных признаков, ни один из которых самостоятельно не обеспечивает его (изобретения) желательных атрибутов. Без ограничения объема, определенного прилагаемой формулой изобретения, далее вкратце описываются его более примечательные особенности. После знакомства с описанием, особенно, после прочтения раздела, озаглавленного «Подробное описание некоторых вариантов осуществления изобретения», станет понятным, каким образом отличительные признаки системы и способов обеспечивают несколько преимуществ над традиционными системами и способами.
[0006] Один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатой коробки передач (БКП), имеющей группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. Способ включает стадию, на которой статор БКП конструктивно исполняют таким образом, чтобы придать состояние смещения каждой наклоняемой оси вращения независимо. В одном варианте осуществления состояние смещения основывают, по меньшей мере, частично, на угловом смещении пластины статора. В другой варианте осуществления состояние смещения основывают, по меньшей мере, частично, на угле наклона наклоняемой оси вращения.
[0007] Еще один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатой коробки передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. В одном варианте осуществления способ включает стадию, на которой вращают статор, с которым операционно связан каждый сателлит с передачей мощности за счет сцепления. Статор могут выполнять так, чтобы каждой наклоняемой оси вращения независимо придавать состояние смещения. Кроме того, способ включает стадию, на которой каждую наклоняемую ось вращения направляют в состояние равновесия. Состояние равновесия может основываться, по меньшей мере, частично, на вращении пластины статора. В некоторых вариантах осуществления состояние равновесия имеет состояние нулевого угла смещения.
[0008] Еще один аспект изобретения относится к способу поддержки группы сателлитов с передачей мощности за счет сцепления бесступенчатой коробки передач (БКП). Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. В одном варианте осуществления способ включает стадию, на которой предусматривают первую пластину статора с несколькими радиально смещенными пазами. Радиально смещенные пазы располагают на определенном угловом расстоянии между собой вокруг центра первой пластины статора. Способ может включать стадию, на которой каждый из сателлитов с передачей мощности за счет сцепления операционно соединяют с первой пластиной статора. В одном варианте осуществления способ включает стадию, на которой предусматривают вторую пластину статора с несколькими радиальными пазами. Радиальные пазы могут располагать на определенном угловом расстоянии между собой вокруг центра второй пластины статора. Кроме того, способ может включать также стадию, на которой сателлиты с передачей мощности за счет сцепления операционно соединяют со второй пластиной статора.
[0009] Один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатой коробки передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. Способ включает стадию, на которой предусматривают пластину статора, операционно соединенную с каждым из сателлитов с передачей мощности за счет сцепления. В одном варианте осуществления способ включает стадию, на которой получают уставку для передаточного числа БКП по частоте вращения. Способ может включать стадию, на которой определяют уставку для углового смещения пластины статора. Эту уставку могут основывать, по меньшей мере, частично, на уставке для передаточного числа по частоте вращения. Кроме того, способ может включать стадию, на которой пластину статора вращают в положение, соответствующее уставке для углового смещения пластины статора. Поворотом пластины статора могут вызывать состояние смещения на каждой наклоняемой оси вращения. Пластину статора могут выполнять так, чтобы регулировать состояние смещения при наклоне каждой наклоняемой оси вращения.
[0010] Еще один аспект изобретения относится к способу регулирования передаточного числа по частоте вращения бесступенчатой коробки передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления можно выполнить имеющим наклоняемую ось вращения. Способ может включать стадию, на которой определяют уставку для передаточного числа БКП по частоте вращения. В одном варианте осуществления способ может включать стадию, на которой измеряют фактическое передаточное число БКП по частоте вращения. Способ включает стадию, на которой сравнивают фактическое передаточное число по частоте вращения с уставкой для передаточного числа по частоте вращения, чтобы тем самым получить величину сравнения. Кроме того, способ включает стадию, на которой поворачивают пластину статора в положение углового смещения на основании, по меньшей мере, частично, этой величины сравнения. Поворотом пластины статора каждому из сателлитов с передачей мощности за счет сцепления придают состояние смещения. Состояние смещения изменяется при наклоне каждой наклоняемой оси вращения, при котором угловое смещение остается постоянным.
[0011] Еще один аспект изобретения относится к бесступенчатой коробке передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления, расположенных на определенном угловом расстоянии между собой вокруг главной оси передачи. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. БКП имеет первую пластину статора, которая соосна с главной осью передачи. Первая пластина статора может иметь несколько радиально смещенных пазов. Радиально смещенные пазы могут выполняться так, что каждая наклоняемая ось направляется независимо от других. БКП может иметь вторую, пластину статора, соосную с главной осью передачи. Вторая пластина статора может иметь несколько радиальных пазов. Радиальные пазы могут выполняться так, чтобы независимо направлять наклоняемые оси вращения. Первая пластина статора выполнена так, чтобы вращаться относительно второй пластины статора.
[0012] В другом аспект настоящее изобретение относится к пластине статора для бесступенчатой коробки передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления. Пластина статора может иметь практически дискообразное тело, имеющее центр. В одном варианте осуществления пластина статора может иметь несколько радиально смещенных направляющих, расположенных на определенном угловом расстоянии между собой вокруг центра. Каждая из радиально смещенных направляющих может иметь линейное смещение от осевой линии дискообразного тела.
[0013] Еще один аспект изобретения относится к бесступенчатой коробке передач (БКП), которая имеет группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. В одном варианте осуществления БКП имеет первую пластину статора, расположенную соосно вокруг главной оси передачи БКП. Первая пластина статора может быть операционно соединенной с каждым сателлитом с передачей мощности за счет сцепления. Первая пластина статора может иметь несколько радиально смещенных пазов, расположенных на определенном угловом расстоянии между собой вокруг центра первой пластины статора. Каждый из радиально смещенных пазов может иметь линейное смещение от осевой линии первой пластины статора. Кроме того, БКП может иметь вторую пластину статора, расположенную соосно вокруг главной оси передачи БКП. Вторая пластина статора имеет несколько радиальных пазов. Радиальные пазы могут располагаться на определенном угловом расстоянии между собой вокруг центра второй пластины статора. Каждый из радиальных пазов практически радиально совпадает с центром второй пластины статора. БКП может иметь привод, операционно соединенный, по меньшей мере, с одной из первой и второй пластин статора. Привод может предназначаться для создания относительного вращения между первой и второй пластинами статора.
[0014] Один аспект изобретения относится к сферической планетарной бесступенчатой коробке передач (БКП), которая содержит группу сателлитов с передачей мощности за счет сцепления. Каждый сателлит с передачей мощности за счет сцепления имеет наклоняемую ось вращения. Кроме того, БКП может содержать первую направляющую, совпадающую с линией, перпендикулярной главной оси передачи БКП. Первая направляющая может конструктивно исполняться так, чтобы воздействовать на наклоняемую ось вращения. Кроме того, БКП может содержать вторую направляющую, совпадающую с линией, которая параллельна линии, перпендикулярной главной оси передачи БКП. Вторая направляющая может конструктивно исполняться так, чтобы воздействовать на наклоняемую ось вращения.
[0015] Один аспект изобретения относится к способу изготовления бесступенчатой коробки передач (БКП). В одном варианте осуществления, способ включает стадию, на которой предусматривают первую направляющую, радиально совпадающую с линией, перпендикулярной главной оси передачи БКП. Способ включает стадию, на которой выполняют смещение второй направляющей. В плоскости проекции соответствующие линии проекции первой и второй направляющих пересекаются, тем самым образуя место пересечения. Способ может включать стадию, на которой группу сателлитов с передачей мощности за счет сцепления операционно соединяют с первой и второй направляющими. Кроме того, способ может включать стадию, на которой первую и вторую направляющие выполняют так, чтобы дать им возможность вращения относительно друг друга вокруг главной оси передачи.
КРАТКОЕ ОПИСАНИЕ ФИГУР
[0016] На фиг.1А приведено схематическое представление некоторых компонентов сферической планетарной бесступенчатой коробки передач (БКП) и некоторых соответствующих систем координат.
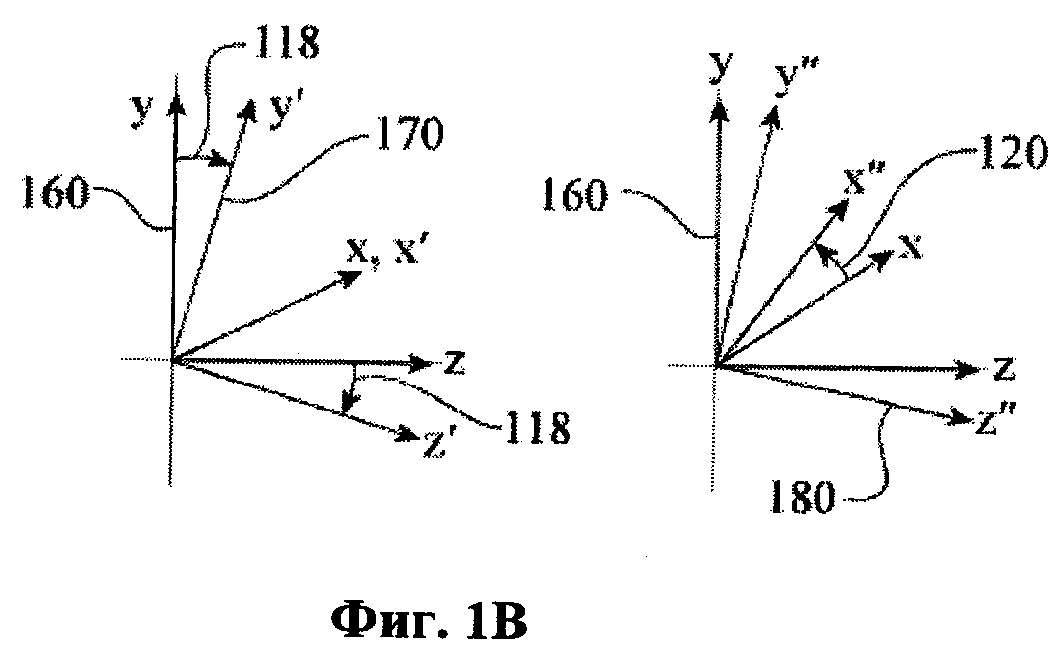
[0017] На фиг.1В приведена схема некоторых соответствующих систем координат, показанных на фиг.1А.
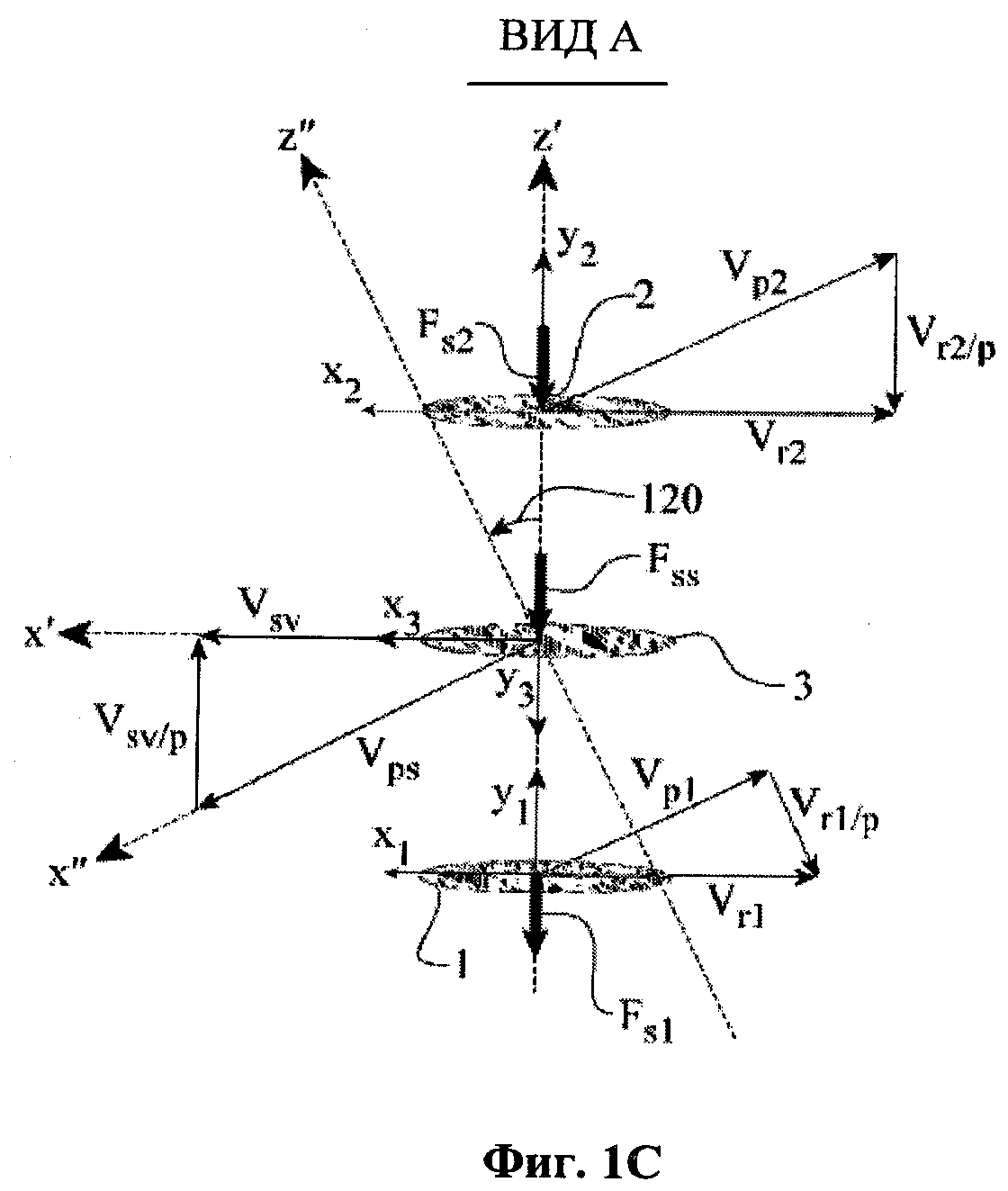
[0018] На фиг.1C приведено схематическое представление некоторых кинематических зависимостей между некоторыми контактирующими компонентами БКП, показанной на фиг.1А.
[0019] Фиг.1D представляет собой показательный график зависимости между коэффициентом сцепления и относительной скоростью для типичной текучей среды сцепления и контакта качения между компонентами БКП с передачей мощности за счет сцепления.
[0020] Фиг.1Е представляет собой схему свободного тела сателлита с передачей мощности за счет сцепления БКП, показанной на фиг.1А.
[0021] На фиг.1F приведено схематическое представление сателлита с передачей мощности за счет сцепления БКП, показанной на фиг.1А, на котором показан угол смещения.
[0022] Фиг.2 представляет собой блок-схему приводного устройства, предназначенного для использования некоторых предлагаемых вариантов осуществления БКП и систем и способов управления на основании смещения для них, раскрытых в настоящем описании.
[0023] На фиг.3 приведено схематическое представление некоторых компонентов сферической планетарной БКП и некоторых соответствующих систем координат.
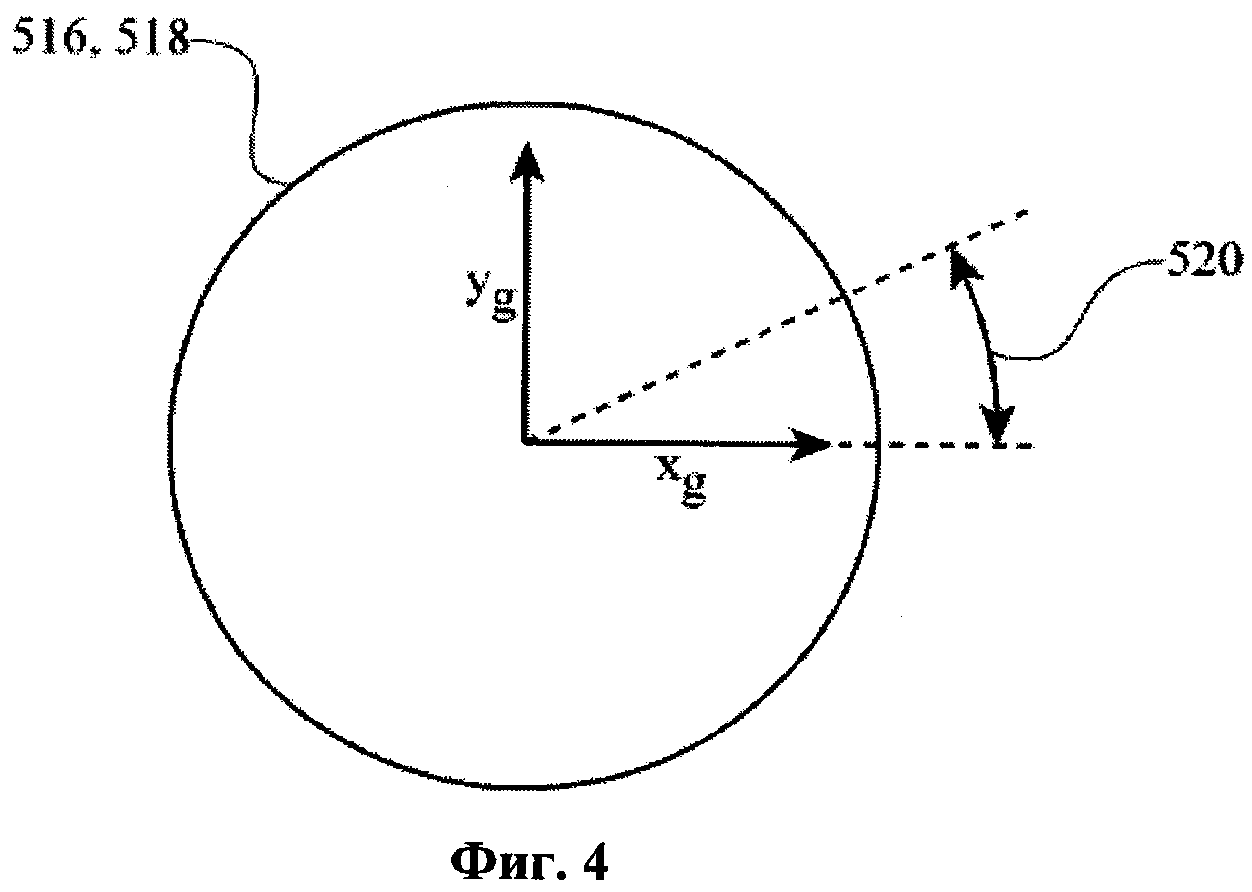
[0024] На фиг.4 приведено схематическое представление некоторых компонентов БКП, показанной на фиг.3, и некоторых соответствующих систем координат.
[0025] На фиг.5А приведено схематическое представление некоторых компонентов БКП, показанной на фиг.3.
[0026] На фиг.5В приведено схематическое представление некоторых компонентов БКП, показанной на фиг.3.
[0027] На фиг.5С приведено схематическое представление некоторых компонентов, которые могут использоваться с БКП, показанной на фиг.3.
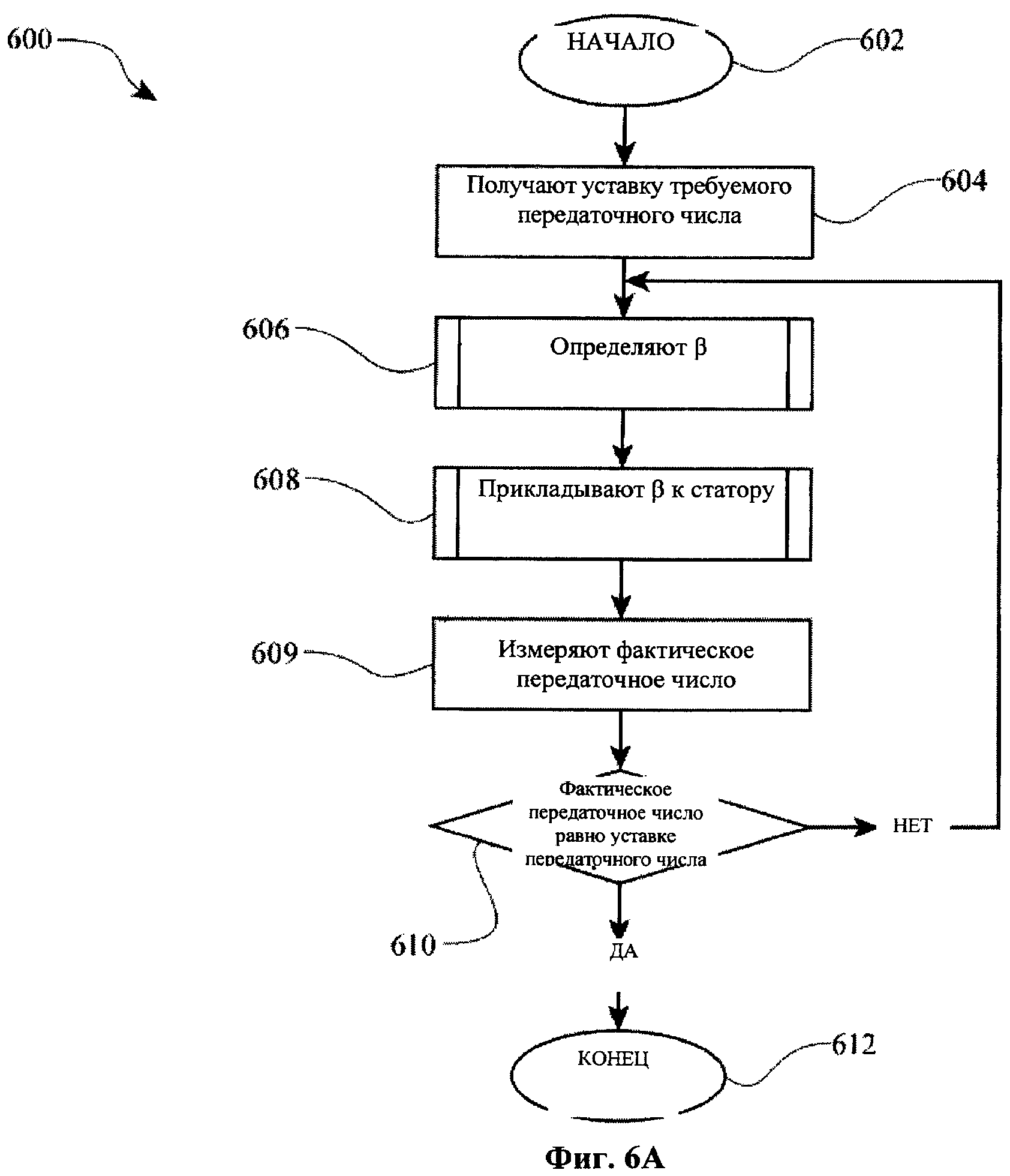
[0028] Фиг.6А представляет собой блок-схему основанного на смещении процесса управления, который может использоваться с БКП, показанной на фиг.3.
[0029] На фиг.6В приведен график, которые представляет справочную таблицу, которую можно использовать в подпроцессе основанного на смещении процесса управления, представленного на фиг.6А.
[0030] Фиг.6С представляет собой блок-схему подпроцесса привода, который можно использовать с основанным на смещении процессом управления на фиг.6А.
[0031] Фиг.7 представляет собой разрез варианта осуществления предлагаемой БКП, имеющей основанную на смещении систему управления.
[0032] Фиг.8 представляет собой разрез еще одного варианта осуществления предлагаемой БКП, имеющей основанную на смещении систему управления.
[0033] Фиг.9 представляет собой вид в разрезе частично в перспективном изображении БКП, показанной на фиг.7.
[0034] Фиг.10 представляет собой вид в плане, на котором показаны некоторые компоненты БКП, показанной на фиг.7.
[0035] Фиг.11А представляет собой вид в плане варианта осуществления пластины статора, которую можно использовать с БКП, показанной на фиг.7.
[0036] Фиг.11В представляет собой вид в перспективном изображении пластины статора, показанной на фиг.11А.
[0037] Фиг.12 представляет собой разрез пластины статора, показанной на фиг.11, по линии А-А.
[0038] Фиг.13 представляет собой разрез пластины статора, показанной на фиг.11, по линии В-В.
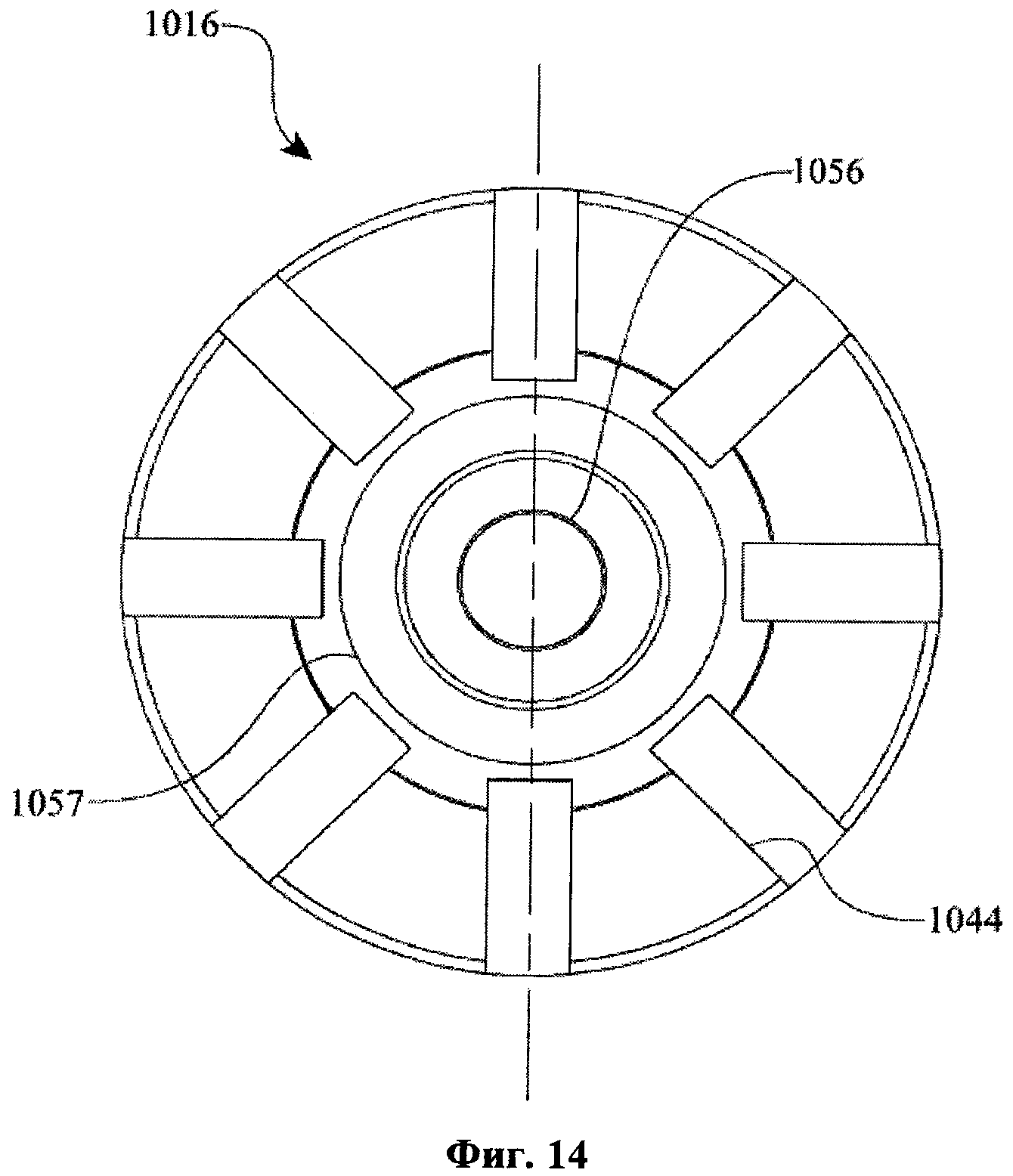
[0039] Фиг.14 представляет собой вид в плане еще одного варианта осуществления пластины статора, который можно использовать с БКП, показанной на фиг.6.
[0040] Фиг.15 представляет собой разрез пластины статора, показанной на фиг.14.
[0041] Фиг.16 представляет собой покомпонентный вид в перспективном изображении узла сателлита с передачей мощности за счет сцепления, который можно использовать с БКП, показанной на фиг.6.
[0042] Фиг.17 представляет собой покомпонентный вид в перспективном изображении еще одного варианта осуществления узла сателлита с передачей мощности за счет сцепления, который можно использовать с БКП, показанной на фиг.6.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0043] Предпочтительные варианты осуществления будут теперь описаны со ссылками на прилагаемые фигуры, на которых подобные элементы обозначены подобными позициями. Терминология, используемая в последующем описании, не должна интерпретироваться каким-либо ограниченным или рестриктивным образом лишь по той причине, что она используется в связи с подробным описанием неких конкретных вариантов осуществления изобретения. Кроме того, варианты осуществления изобретения могут включать несколько признаков изобретения, ни один из которых самостоятельно не обеспечивает его желательных атрибутов и самостоятельно не является существенным для практического осуществления описанных изобретений. Некоторые варианты осуществления БКП, описанные в настоящем описании, в целом относятся к типу, описанному в патентах США №№6241636, 6419608, 6689012, 7011600, 7166052, заявках на патент США №№11/243484 и 11/543311 и заявках на патент согласно Договору о патентной кооперации PCT/IB-2006/054911 и PCT/US2007/023315. Полное описание из каждого из этих патентов и заявок на патент настоящим ссылкой включается на настоящее описание.
[0044] Используемые в настоящем описание термины «операционно соединенный», «операционно связанный» и подобные термины относятся к взаимосвязи (механической и иной) между элементами, посредством которой действие одного элемента приводит к соответствующему, последующему или одновременному действию или срабатыванию второго элемента. Следует отметить, что при использовании указанных терминов для описания вариантов осуществления изобретения обычно описываются конкретные конструкции или механизмы, которые соединяют или связывают элементы. Однако, если конкретно не указано иное, когда используется один из указанных терминов, этот термин указывает на то, что фактическое соединение или связь может принимать самые разнообразные формы, которые в определенных случаях будут очевидными специалисту в соответствующей области техники.
[0045] В целях описания термин «радиальный» в соответствующем роде, числе и падеже используется в настоящем описании для указания направления или положения, перпендикулярное относительно продольной оси коробки передач или вариатора. Термин «аксиальный» в соответствующем роде, числе и падеже, используемый в настоящем описании, означает направление или положение вдоль оси, которая параллельна главной или продольной оси коробки передач или вариатора. Для ясности и краткости иногда подобные компоненты, обозначенные подобными позициями (например, подшипник 1011А и подшипник 1011В) будут упоминаться совместно как обозначенные одной позицией (например, подшипник 1011).
[0046] Следует отметить, что упоминание в настоящем описании «сцепления» не исключает случаев применения, в которых преобладающий или исключительный режим передачи мощности - путем «трения». Не пытаясь установить в данном случае категоричное различие между передачей за счет сцепления и фрикционной передачей, их обычно можно понимать как разные режимы передачи мощности. Передачи за счет сцепления обычно включают передачу мощности между двумя элементами поперечными (сдвигающими) силами в тонком слое текучей среды, захваченной между этими элементами. Текучие среды, используемые в этих случаях применения, обычно имеют коэффициенты сцепления выше, чем у обычных минеральных масел. Коэффициент сцепления (µ) представляет максимальные имеющиеся тяговые усилия, которые должны присутствовать на поверхностях сопряжения контактирующих компонентов, и является показателем максимального имеющегося приводного крутящего момента. Фрикционные передачи обычно включают передачу мощности между двумя элементами за счет сил трения между этими элементами. В целях настоящего описания следует понимать, что описываемая в нем БКП может работать в обоих режимах передачи мощности - за счет сцепления и фрикционной. Например, в варианте осуществления, в котором БКП используется для применения в велосипеде, БКП может иногда работать как фрикционная передача, а иногда как передача за счет сцепления в зависимости от условий крутящего момента и скорости, имеющихся при работе.
[0047] Варианты осуществления изобретения, раскрытые в настоящем описании, относятся к управлению вариатором и (или) БКП с использованием практически сферических сателлитов, каждый из которых имеет наклоняемую ось вращения (далее по тексту именуемую «осью вращения сателлита»), которая может регулироваться для достижения при работе требуемого отношения частоты вращения на входной валу к числу оборотов на выходном валу. В некоторых вариантах осуществления регулировка указанной оси вращения включает угловое отклонение оси сателлита в одной плоскости, чтобы добиться угловой регулировки оси вращения сателлита во второй плоскости, тем самым регулируя передаточное число вариатора. Угловое отклонение в первой плоскости именуется в настоящем описании «смещением» или «углом смещения». В одном варианте осуществления система управления координирует использование угла смещения для создания сил между определенными контакт тирующими компонентами в вариаторе, которые наклоняют ось вращения сателлита. Наклоном оси вращения сателлита регулируется передаточное число вариатора. В последующем описании система координат установлена относительно сферического сателлита; далее приводится описание определенных кинематических зависимостей между некоторыми контактирующими компонентами, которые создают силы, стремящиеся вызвать наклон оси вращения сателлита при наличии угла смещения. Кроме того, будут рассмотрены варианты осуществления основанных на смещении систем управления для достижения требуемого передаточного числа вариатора.
[0048] Обратимся теперь к фиг.1А и 1В. Системы координат будут определены относительно вариантов осуществления некоторых компонентов бесступенчатой коробки передач (БКП). Системы координат показаны здесь для иллюстрации и не должны истолковываться единственная система отсчета, применимая к вариантам осуществления, рассматриваемым в настоящем описании. Вариант осуществления БКП 100 содержит в основном сферические сателлиты 108, действующие за счет сцепления, в контакте с солнцем 110 с передачей мощности за счет сцепления, действующем за счет сцепления (схематически показанным как линия). Сателлиты 108 с передачей мощности за счет сцепления находятся также в контакте с первым кольцом 102, действующим за счет сцепления, и вторым тяговым кольцом 104, действующим за счет сцепления, соответственно в первом угловом положении 112 и втором угловом положении 114. На фиг.1А определены глобальная система координат 150 (т.е., xg, yg, zg) и система координат 160 с началом в центре сателлита (т.е., х, у, z). Глобальная система координат 150 ориентирована относительно продольной оси или главной оси передачи 152 БКП 100, например, ось Zg совпадает с главной осью передачи 152, относительно которой расположены сателлиты 108 с передачей мощности за счет сцепления. Система координат 160 с началом в центре сателлита имеет свое начало в геометрическом центре сателлита 108 с передачей мощности за счет сцепления, причем ось у проходит перпендикулярно главной оси передачи 152, а ось z параллельна главной оси передачи 152. Каждый из сателлитов 108 с передачей мощности за счет сцепления имеет ось вращения сателлита, т.е., ось 106 сателлита, которая может поворачиваться относительно оси х и при этом образовывать угол наклона 118, проецируемый на плоскость y-z (иногда именуемую в настоящем описании как у). Угол наклона 118 определяет кинематическое передаточное число между кольцами 102, 104. Каждый из сателлитов 108 имеет скорость вращения относительно оси 106 сателлита, которая показана на фиг.1А как скорость 122 сателлита, иногда именуемую в настоящем описании как со. Обычно ось 106 сателлита конструктивно соответствует оси сателлита, которая может быть операционно связанной с водимом (не показанным), которое может быть неподвижным, хотя в других вариантах осуществления ось сателлита связана с водилом (не показанным), которое может вращаться относительно главной оси передачи 152. В системе координат 160 с началом в центре сателлита ось х направлена в плоскости страницы (хотя на фиг.1А такой точно не показана), и ось z параллельна главной оси передачи 152. В целях иллюстрации угол наклона 118 определен в плоскости yg-zg.
[0049] Обратимся теперь к фиг.1В. Система координат 160 с началом в центре сателлита дополнительно разложена для иллюстрации угловых регулировок оси 106 сателлита, которые используются в вариантах осуществления основанных на смещении систем управления, описываемых в настоящем описании. Как показано на фиг.1 В, угол наклона 118 можно получить при вращении системы координат 160 с осью 106 сателлита в плоскости y-z относительно оси х для достижения первой относительной системы координат 170 (х', у', z'). В относительной системе координат 170 ось 106 сателлита совпадает с осью z'. При вращении системы координат 170 с осью 106 сателлита относительно оси у угол смещения 120 (иногда именуемый в настоящем описании как с) можно получить в плоскости x-z, которая иллюстрируется второй относительной системой координат 180 (х", у", z"). Угол смещения 120 можно считать - приблизительно - проекцией в плоскости x-z углового смещения оси 106 сателлита. Однако с другой стороны угол смещения 120 - это угловое положение оси 106 сателлита в плоскости x'-z', определенное относительными системами координат 170 и 180. В одном варианте осуществления БКП 100, угол наклона 118 управляется, по меньшей мере, частично, путем регулирования угла смещения 120.
[0050] Обратимся теперь к фиг.1C. Со ссылкой на эту фигуру будут описаны некоторые кинематические зависимости между контактирующими компонентами БКП 100 для объяснения, каким образом вызывание состояния смещения создает силы, которые регулируют угол наклона 118. В настоящем описании выражение «состояние смещения» означает такое расположение оси 106 сателлита относительно главной оси передачи 152, что существует не равный нулю угол смещения 120. Следовательно, «вызывание состояния смещения» подразумевает вызывание выравнивания оси 106 сателлита под не равным нулю углом смещения 120. Следует отметить, что в некоторых вариантах осуществления БКП 100 на сателлит 108 с передачей мощности за счет сцепления действуют и некоторые вызванные верчением силы. Верчение - это явление, связанное с контактами, действующими за счет сцепления, хорошо известное специалистам в соответствующей области техники. Непосредственно для нашего рассмотрения влияния вызванных кручением сил будут проигнорированы. В БКП 100 компоненты контактируют с сателлитом 108 с передачей мощности за счет сцепления в трех местах с образованием зон контакта, действующего за счет сцепления, или фрикционного контакта. Как показано на фиг.1, первое кольцо 102 приводит сателлит 108 с передачей мощности за счет сцепления в контактной зоне 1, и сателлит 108 с передачей мощности за счет сцепления передает мощность на второе кольцо 104 в контактной зоне 2. Солнце 110 с передачей мощности за счет сцепления поддерживает сателлит 108 с передачей мощности за счет сцепления в контактной зоне 3. В целях рассмотрения эти три контакта 1, 2, 3 расположены на фиг.1C как на виде в плоскости x"-z", если смотреть сверху на БКП 100, или виде на фиг.1А. Поскольку контактные зоны 1, 2, 3 лежат не в одной плоскости, на фиг.1C используются системы координат с началом в точке контакта, так что контактные зоны 1, 2, 3 могут иллюстрироваться плоскостью x"-z". Подстрочные индексы 1, 2, и 3 используются для обозначения конкретной контактной зоны для систем координат с началом в точке контакта. Оси Z1,2,3 направлены в центр сателлита 108 с передачей мощности за счет сцепления.
[0051] Обратимся теперь к контактной зоне 1 на фиг.1C. Поверхностная скорость первого кольца 102 обозначена в отрицательном направлении x1вектором Vr1, а поверхностная скорость сателлита 108 с передачей мощности за счет сцепления представлена вектором Vp1; угол, образованный между векторами Vr1 и Vp1, равен приблизительно углу смещения 120. Результирующая относительная поверхностная скорость между кольцом 102 и сателлитом 108 с передачей мощности за счет сцепления представлена вектором Vr1/P. В контактной зоне 3 между сателлитом 108 с передачей мощности за счет сцепления и солнцем 110 с передачей мощности за счет сцепления поверхностная скорость солнца 110 с передачей мощности за счет сцепления представлена вектором Vsv, а поверхностная скорость сателлита 108 с передачей мощности за счет сцепления представлена вектором Vps; угол, образованный между векторами Vsv и Vps, равен углу смещения 120. Относительная поверхностная скорость между сателлитом 108 с передачей мощности за счет сцепления и солнцем 110 с передачей мощности за счет сцепления представлена вектором Vsv/p.Аналогично, для контактной зоны 2, поверхностная скорость сателлита 108 с передачей мощности за счет сцепления в контактной зоне 2 показана вектором Vp2, а поверхностная скорость второго кольца 104 представлена вектором Vr2, угол, образованный между Vp2 и Vr2, равен приблизительно углу смещения 120; относительная поверхностная скорость между сателлитом 108 с передачей мощности за счет сцепления и вторым кольцом 104 представлена результирующим вектором Vr2/p.
[0052] Кинематические зависимости, рассмотренные выше, приводят к созданию сил в контактирующих компонентах. На фиг.1D представлена обобщенная показательная кривая сцепления; применимая к каждой из контактных зон 1, 2, 3. График иллюстрирует зависимость между коэффициентом сцепления µ и относительной скоростью между контактирующими компонентами. Коэффициент сцепления µ указывает на способность текучей среды передавать силу. Относительная скорость, такая, как Vr1/p, может быть функцией угла смещения 120. Коэффициент сцепления µ является векторной суммой коэффициента сцепления в направлении х µх и коэффициента сцепления в направлении у µу в контактной зоне 1, 2 или 3. Как правило, коэффициент сцепления µ зависит среди прочего от свойств текучей среды сцепления, нормальной силы в контактной зоне и скорости текучей среды сцепления в контактной зоне. Для данной текучей среды сцепления при повышении относительных скоростей компонентов коэффициент сцепления µ увеличивается, пока коэффициент сцепления µ не достигает максимума, после чего коэффициент сцепления µ уменьшается. Следовательно, при наличии угла смещения 120 (т.е., в состоянии смещения) в контактных зонах 1, 2, 3 вокруг сателлита 108 с передачей мощности за счет сцепления за счет кинематических условий возникают силы. Как показано на фиг.1C и 1E, Vr1/p создает силу тяги, параллельную вектору Vr1/p с боковой составляющей силой Fs1. При увеличении угла смещения 120 Vr1/pувеличивается и, тем самым, увеличивает силу Fs1 в соответствии с общей зависимостью, показанной на фиг.1D. Vsv/p создает силу Fss и, подобным образом, Vr2/p создает силу fs2. Силы Fs1, Fss, и Fs2 объединяются и создают чистым момент относительно сателлита 108 в плоскости y-z. В частности, сумма моментов относительно ролика 108 с передачей мощности за счет сцепления ∑M=R*(Fs1+Fs2+Fss), где R - радиус ролика 108 с передачей мощности за счет сцепления, а силы Fs1, Fs2 и Fss - результирующие составляющие контактных сил в плоскости y-z. Контактные силы, иногда именуемые в настоящем описании как силы, вызванные смещением, в вышеприведенной формуле являются такими: Fs1=µy1N1, Fs2=µy2N2, Fss=µysN3, где N1,2,3 - нормальная сила в соответствующей контактной зоне 1, 2, 3. Поскольку коэффициент сцепления µ зависит от относительной скорости между контактирующими компонентами, коэффициенты сцепления µy1, µу2 и µys являются функцией угла смещения 120, увязанного кинематической зависимостью. По определению, момент есть ускорение инерции; следовательно, в варианте осуществления, иллюстрируемом в настоящем описании, момент будет создавать ускорение угла наклона γ&. Следовательно, скорость изменения угла наклона γ& есть функция угла смещения 120.
[0053] Обратимся теперь к фиг.1F. Сателлит 108 с передачей мощности за счет сцепления показан имеющим угол наклона 118, равный нулю, в результате чего ось вращения сателлита 106 является параллельной (в плоскости yg-zg) главной оси передачи 152 БКП 100, а скорость вращения 122 сателлита 108 с передачей мощности за счет сцепления коаксиальна с осью z. Для создания сил, вызывающих изменение угла наклона 118, в плоскости x-z может образовываться угол смещения 120. При наличии угла смещения 120, сателлит 108 с передачей мощности за счет сцепления будет иметь скорость вращения 122 относительно оси z", в плоскости y-z' образуется угол наклона 118.
[0054] Обратимся теперь к фиг.2-17. Со ссылками на эти фигуры теперь будут описаны варианты осуществления некоторых систем управления для БКП, принцип действия которых основан на вызывании смещенного состояния, чтобы тем самым служить причиной изменения угла наклона 118. Фиг.2 иллюстрирует передачу 25, которая содержит БКП 300, операционно подключенный между первичным движителем 50 и нагрузкой 75. Кроме того, передача 25 может содержать основанную на смещении систему управления 200. Обычно первичный движитель 50 подает мощность в БКП 300, а БКП 300 передает мощность на нагрузку 75. Первичный движитель 50 может представлять собой одно или несколько различных энергогенерирующих устройств, а нагрузкой 75 могут быть одно или несколько различных приводимых устройств или компонентов. Примеры первичного движителя 50 включают среди прочего ручные устройства, двигатели внутреннего сгорания, электродвигатели и т.п. Примеры нагрузок включают среди прочего узлы дифференциалов трансмиссии, узлы отбора мощности, узлы генераторов, узлы насосов и т.п. В некоторых вариантах осуществления основанная на смещении система управления 200 может координировать работу БКП 300, а также первичного движителя 50, или может координировать работу БКП 300 и нагрузки 75, или может координировать работу всех элементов в передаче 25. В варианте осуществления, показанном на фиг.2, основанная на смещении система управления 200 может конструктивно исполняться для использования регулировки угла смещения 120 для управления рабочим состоянием БКП 300 и, следовательно, для координации управления передачей 25.
[0055] Обратимся теперь к фиг.3-5В. В одном варианте осуществления БКП 500 содержит несколько практически сферических сателлитов 508 с передачей мощности за счет сцепления, конструктивно исполненных, чтобы контактировать с солнцем 510 с передачей мощности за счет сцепления. Кроме того, сателлиты 508 с передачей мощности за счет сцепления могут контактировать с первым кольцом 502 и вторым кольцом 504. Кольца 502, 504 могут размещаться практически таким же образом, как и первое кольцо 102 и второе кольцо 104, показанные на фиг.1А. Зоны контакта между сателлитом 508 с передачей мощности за счет сцепления, первым кольцом 502, вторым кольцом 504 и солнцем 510 с передачей мощности за счет сцепления практически идентичны контактам 1, 2 и 3 соответственно, показанным на фиг.1A-1F. Подобным образом, системы координат с началом в точке контакта и кинематические зависимости, рассмотренные со ссылками на фиг.1A-1F, могут в целях описания применяться и к БКП 500.
[0056] В одном варианте осуществления глобальная система координат 550 (то есть, xg, yg, zg) определена, как показано на фиг.3. Глобальная система координат 550 практически идентична глобальной системе координат 150. Глобальная система координат 550 ориентирована относительно продольной оси или главной оси передачи 552 БКП 500, например,, с осью zg, совпадающей с главной осью передачи 552, относительно которой расположены сателлиты 508 с передачей мощности за счет сцепления. Ось yg перпендикулярна главной оси передачи 552. Ось xg перпендикулярна главной оси передачи 552. Каждый из сателлитов 508 с передачей мощности за счет сцепления имеет ось вращения, т.е., ось 506 сателлита, которая может наклоняться в плоскости yg-zg при этом образовывать угол наклона 511 (γ), который практически идентичен углу наклона 118 (фиг.1А). Ось 506 сателлита может следовать первой направляющей 512 (показанной как линия на фиг.3) на одном конце оси 506 сателлита. Ось 506 сателлита может следовать второй направляющей 514 (показанной как линия на фиг.3) на другом конце оси 506 сателлита.
[0057] Если обратиться конкретно к фиг.4, в одном варианте осуществления первая направляющая 512 и вторая направляющая 514 могут выполняться на первой пластине статора 516 и второй пластине статора 518 соответственно. Обычно ось 506 сателлита конструктивно соответствует оси сателлита, которая может быть операционно связанной с первой и второй направляющими 512, 514 соответственно. В некоторых вариантах осуществления первая и вторая пластины статора 516, 518 являются практически дискообразными телами, предназначенными для операционной связи с осью 506 сателлита и ее поддержки при работе БКП 500. Как иллюстративный пример в целях рассмотрения, вид, приведенный на фиг.4, - это проекция пластины статора 516 на пластину статора 518 в плоскости xg-yg. Угловое смещение 520 пластины статора 516 относительно пластины статора 518 можно определить в плоскости xg-yg (ось zg, совпадающая с главной осью передачи 552, перпендикулярна плоскости страницы фиг.4; ось xg и ось yg каждая перпендикулярна главной оси передачи 552). Угловое смещение 520 иногда в настоящем описании именуется как "угол β" или короче как "β". Угол смещения, такой, как угол смещения 120, можно определить для БКП 500 практически таким же образом и относительно практически таких же систем координат, какие использовались для БКП 100. Таким образом, в настоящем описании для БКП 500 будет использоваться угол смещения 120 (ς). «Состояние нулевого угла смещения» определяется как состояние оси 506 сателлита, в котором угол смещения 120 равен нулю (ς=0).
[0058] Обратимся к фиг.5А, на которой первая и вторая направляющие 512, 514 опять показаны как проекции в плоскости xg-yg. В некоторых вариантах осуществления первая направляющая 512 может радиально совпадать с началом координат плоскости xg-yg; например, первая направляющая 512 может совпадать с осью yg. В одном варианте осуществления вторая направляющая 514 может иметь смещение 522 от начала координат плоскости xg-yg. В одном случае смещение 522 может определяться как линейное смещение относительно линии построения 519; линия построения 519 параллельна второй направляющей 514 и проходит через начало координат плоскости xg-yg, когда статор 516 расположен в положении номинально нулевого углового смещения 520 (β). Во втором случае вторая направляющая 514 может иметь базовое угловое исходное положение 523 (ψ0) относительно первой направляющей 512.
[0059] Обратимся к фиг.5А и 5В, на которых опять схематически показаны направляющие 512 и 514. В одном варианте осуществления статор 518 может поворачиваться в положение ненулевого углового смещения 520 (β), что вызывает перемещение направляющей 514 относительно направляющей 512 (фиг.5В). Смещение 522 можно показать как радиальное смещение 525 относительно центра статора 518 (то есть, начала координат плоскости xg-yg). Направляющая 514 является касательной к радиальному смещению 525. Если обратиться конкретно к фиг.5А, базовое угловое исходное положение 523 (ψ0) относительно направляющей 512 определено в положении нулевого углового смещения 520 (β=0) и нулевого угла наклона 511 (γ=0). Соответствующее состояние нулевого угла смещения для оси 506 сателлита показано на позиции 524, которое лежит на пересечении первой и второй направляющих 512 и 514, если смотреть как проекции в плоскости xg-yg. Если обратиться теперь конкретно к фиг.5 В, для ненулевого углового смещения 520 (β) направляющая 514 имеет угловое положение 526 (ψ) относительно направляющей 512. Соответствующее состояние нулевого угла смещения для оси 506 сателлита показано на позиции 527, которое находится на пересечении первой и второй направляющих 512 и 514, если смотреть как проекции в плоскости xg-yg. Место 527 служит примером состояния нулевого угла смещения для ненулевого углового смещения 520 (β) и ненулевого угла наклона 511 (γ). Следует отметить, что направляющие 512, 514, схематически проиллюстрированные в настоящем описании, могут предусматриваться, как будет показано ниже в отношении некоторых вариантов осуществления, как пазы, выполненные на статорах 516, 518. В таких случаях направляющие 512, 514 могут представлять центральные линии, проходящие через центр соответствующих радиальных и смещенных пазов. Схематически, как показано на фиг.5А-5С, точка контакта между пазом статора и осью сателлита (или ролика на этой оси сателлита) шара 508 сведена в точку, лежащую на одной из схематических направляющих 512, 514. Однако в некоторых физических вариантах осуществления статора 516, 518 указанная точка контакта не лежит на радиальной линии.
[0060] Ненулевой угол смещения 120 (ς) может вызываться на оси 506 сателлита двумя событиями, происходящими отдельно или в совокупности. Одно из этих событий - изменение углового смещения 520 (β), а другое событие - изменение угла наклона 511 (γ). В одном варианте осуществления зависимость между угловым смещением 520 (β) и углом смещения 120 (ς) при постоянном угле наклона 511 (γ) зависит среди прочего от геометрии БКП 500, например, длины оси 506 сателлита, и (или) радиуса статоров 516, 518. В одном варианте осуществления взаимосвязь между угловым смещением 520 (β) и углом смещения 120 (ς) при постоянном угле 511 (γ) приблизительно выражается формулой β=ς при малых углах. Взаимосвязь между угловым смещением 520 (β) и угловым положением 526 (ψ) может зависеть от геометрии БКП 500 и базового углового исходного положения 523 (ψ0), например. В одном варианте осуществления угловое положение 526 (ψ) может быть пропорциональным угловому смещению 520 (β), и при этом взаимосвязь можно аппроксимировать выражением ψ=β+ψ0 при малых углах. При постоянном угловом смещении 520 (β) угол смещения 120 (ς) может быть увязан и с углом наклона 511 (γ). Например, угол смещения 120 (ς) может быть увязан с угловым положением 526 (ψ) и изменением угла 511 (дельта γ) формулой tg(ς)=(1/2*sin (дельта γ)*tg(ψ)). Применение к этому выражению хорошо известного малоуглового приближения дает формулу ς=1/2 * (дельта γ)*ψ.
[0061] При работе 500, первая и (или) вторая пластины статора 516, 518 могут поворачиваться в положение углового смещения 520 по соответствующему управляющему входному сигналу (не показанному на фиг.3-5С; примерный управляющий входной сигнал см. фиг.7). В некоторых вариантах осуществления первая пластина статора 516 может исполняться практически не вращающейся относительно главной оси передачи 552. Угловое смещение 520 вначале вызывает угол смещения 120 на оси 506 сателлита. Как уже описывалось, угол смещения 120 вызывает изменение угла наклона 511 (γ) оси 506 сателлита. При наклоне оси 506 сателлита концы оси 506 сателлита следуют первой и второй направляющим 512, 514. Направляющие 512, 514 конструктивно исполнены так, что при наклоне оси 506 сателлита в состояние равновесия, которое в одном случае соответствует состоянию нулевого угла смещения, угол смещения 120 уменьшается по величине. При достижении осью 506 сателлита угла наклона 511 (γ), что обычно совпадает с состоянием нулевого угла смещения, наклон оси 506 сателлита прекращается. В одном варианте осуществления угол наклона 511 (γ) оси 506 сателлита зависит, по меньшей мере, частично, от углового смещения 520 (β). В некоторых вариантах осуществления, соотношение угла наклона 511 (γ) и углового смещения 520 (β) является единственным, так что каждое значение углового смещения 520 (β) соответствует значению угла наклона 511 (γ), при котором БКП 500 может работать в равновесном состоянии передаточного числа.
[0062] При достижении равновесного состояния каждая из осей 506 сателлитов находится практически в состоянии нулевого угла смещения. Поскольку оси 506 сателлитов и, следовательно, сателлиты 508 БКП 500 независимо связаны со статорами 516, 518, каждый из сателлитов 508 и каждая из осей 506 сателлитов могут независимо самостабилизироваться. Чтобы было понятнее, когда угол наклона 511 (γ) одной из осей 506 сателлитов уходит от равновесного состояния (например, вследствие внешнего воздействия или нарушения рабочего режима), концы оси 506 сателлита следуют за направляющими 512, 514. Как уже описывалось, на оси 506 сателлита вызывается состояние смещения, и, следовательно, ось 506 сателлита наклоняется в положение угла наклона 511 (γ), которое обычно соответствует равновесному состоянию при данном угловом смещении 520 (β). Направляющие 512, 514 независимо направляют перемещение или наклон осей 506 сателлитов. Таким образом, перемещение или наклон одной из осей 506 сателлитов может происходить практически независимо от других осей сателлитов БКП 500.
[0063] Конструктивное исполнение направляющих 512, 514 влияет на способность БКП 500 стабилизировать равновесное состояние. При данном направлении вращения первого кольца 504 расположение направляющих 512, 514, показанное на фиг.5А, приводит к стабильной работе БКП 500. Например, для БКП 500 может поддерживаться требуемое передаточное число, которое соответствует угловому смещению 520 (β). Если придерживаться правила знаков, установленному на фиг.1A-1F, можно показать, что при данном угловом смещении 520 (β) положительное изменение угла наклона 511 (γ) вызывает положительное изменение угла смещения и vice versa (наоборот - лат.). Таким образом, в случае относительного расположения направляющих 512, 514, показанного на фиг.5А, каждая ось 506 сателлита может работать устойчиво.
[0064] Если обратимся теперь к фиг.5С, в одном варианте осуществления направляющая 5121 и направляющая 5141 могут быть практически идентичными по функции направляющим 512, 514; однако направляющие 5121, 5141 расположены с базовым угловым исходным положением 5231, которое практически противоположно по направлению (то есть, с обратным знаком) базовому угловому исходному положению 523 (ψ0) относительно плоскости xg-yg. Принимая эквивалентное направление вращения первого кольца 504 и, следовательно, направление вращения сателлита 508 с передачей мощности за счет сцепления, такое расположение направляющих 5121, 5141 могло бы, по меньшей мере, в некоторых случаях, привести к нестабильной работе БКП 500. Например, для БКП 500 невозможно поддерживать требуемое передаточное число, соответствующее угловому смещению 520 (β), поскольку положительное изменение угла наклона 511 (γ) вызывает отрицательный угол смещения и vice versa. Поэтому любое нарушение в работе, которое наклоняет одну из осей 506 сателлитов, вызовет наклон этой оси 506 сателлита до ограничения, например, механическим упором (не показанным).
[0065] Обратимся теперь к фиг.6А. В одном варианте осуществления основанный на смещении процесс управления 600 может реализовываться, например, в микропроцессоре в сообщении с аппаратными средствами силовой электроники, связанными с БКП 500. Основанный на смещении процесс управления 600 начинают в состоянии 602. Затем основанный на смещении процесс управления 600 продолжают до состояния 604, в котором получают уставку требуемого передаточного числа по частоте вращения БКП 500. Основанный на смещении процесс управления 600 продолжают до состояния 606, в котором определяют угловое смещение 520, например, первого статора 516. Затем в основанном на смещении процессе управления 600 переходят на подпроцесс 608 привода, в котором к статору 516, например, прикладывают угловое смещение 520. После того как подпроцесс 608 привода завершают, основанный на смещении процесс управления 600 продолжают до состояния 609, в котором измеряют фактическое передаточное число по частоте вращения БКП 500. В одном варианте осуществления фактическое передаточное число по частоте вращения БКП 500 могут определять путем измерения частоты вращения, например, колец 502 и 504 или любого иного компонента, указывающего на частоту вращения на ведущем валу и частоту вращения на ведомом валу БКП 500. В некоторых вариантах осуществления фактическое передаточное число можно рассчитать, исходя, по меньшей мере, частично, из условия целевого частоты вращения на ведомом валу или исходя, по меньшей мере, частично, из условия целевой частоты вращения на ведущем валу. В других вариантах осуществления фактическое передаточное число по частоте вращения БКП 500 можно определить путем измерения угла наклона оси 506 сателлита. В других вариантах осуществления фактическое передаточное число по частоте вращения БКП 500 можно определить путем измерения фактического передаточного числа БКП 500 по крутящему моменту. Фактическое передаточное число БКП 500 по крутящему моменту можно определить путем измерения крутящеего момента, например, колец 502 и 504 любого иного компонента, указывающего на крутящий момент на ведущем валу и крутящий момент на ведомом валу БКП 500. Затем в основанном на смещении процессе управления 600 переходят к состоянию 610 принятия решения, в котором измеренное передаточное число сравнивают с уставкой требуемого передаточного числа, чтобы тем самым получить величину сравнения. Если измеренное передаточное число не равно уставке требуемого передаточного числа, в основанном на смещении процессе управления 600 возвращаются в состояние 606. Если измеренное передаточное число равно уставке требуемого передаточного числа, в основанном на смещении процессе управления 600 переходят в конечное состояние 612. В некоторых вариантах осуществления основанный на смещении процесс управления 600 выполняют работающим разомкнутым; в этом случае в подпроцесс 608 состояния 609 и 610 не включены.
[0066] Обратимся к фиг.6В. В одном варианте осуществления в состоянии 606 могут использовать справочную таблицу, которая может быть представлена кривой 607. Кривая 607 иллюстрирует примерную зависимость между угловым смещением 520 (β) и передаточным числом, например, БКП 500. Кривая 607 может описываться формулой у=Ах2-Вх+С, где у - угловое смещение 520 (р), а х - передаточное число. В одном варианте осуществления значения А, В, и С равны соответственно 0,5962, -4,1645 и 3,536. В некоторых вариантах осуществления значения А, В, и С равны соответственно 0,5304, -4,0838 и 3,507. В других вариантах осуществления значения А, В, и С зависят от размеров и геометрии БКП 500, например, среди прочего от положения направляющих 512 и 514 на статорах 516 и 518, длины оси 506 сателлита и размеров колец 502 и 504. В некоторых вариантах осуществления подпроцесс 608 привода выполняют работающим разомкнутым; в этом случае в под-процесс 608 состояния 619 и 620 не включены.
[0067] Обратимся к фиг.6С, в одном варианте осуществления подпроцесс 608 привода могут начать в состоянии 614 и перейти к состоянию 615, в котором получают уставку для углового смещения 520 (β). В подпроцессе 608 привода затем переходят к состоянию 616, в котором определяют сигнал команды приводу, основываясь, по меньшей мере, частично, на угловом смещении 520 (β). В одном варианте осуществления для преобразования уставки углового смещения 520 (β) сигнал команды приводу могут использовать справочную таблицу. В некоторых вариантах осуществления, в качестве сигнала команды приводу могут использовать напряжение или ток. В других вариантах осуществления, в качестве сигнала команды приводу могут использовать изменение положения троса или рычагов и тяг. В некоторых вариантах осуществления для получения сигнала команды приводу по уставке углового смещения 520 (β) могут использовать определенный алгоритм. В подпроцессе 608 привода затем переходят к состоянию 617, в котором сигнал команды приводу посылают в привод и связанные аппаратные средства. В одном варианте осуществления для посылки сигнала команды в аппаратные средства привода могут использовать стандартный серийный связевой протокол. В некоторых вариантах осуществления для передачи сигнала команды в аппаратные средства привода могут использовать трос или рычаги и тяги. В подпроцессе 608 привода затем переходят к состоянию 618, в котором поворачивают статор, например, статор 516. Затем в подпроцессе 608 привода переходят к состоянию 619, в котором измеряют угловое смещение 520 (β). Затем в подпроцессе 608 привода переходят к состоянию 620 принятия решения, в котором измеренное угловое смещение 520 (β) сравнивают с уставкой для углового смещения 520 (β). Если измеренное угловое смещение 520 (β) не равно уставке углового смещения 520 (β), в подпроцессе 608 привода возвращаются в состояние 616. Если измеренное угловое смещение 520 (β) равно уставке углового смещения 520 (β), подпроцесс 608 привода заканчивают в состоянии 622, в котором основанный на смещении процесс управления 600 могут продолжать в состоянии 609, как описано выше со ссылками на фиг.6А. В некоторых вариантах осуществления подпроцесс 608 привода выполняют работающим разомкнутым; в этом случае в подпроцесс 608 состояния 619 и 620 не включены.
[0068] Обратимся теперь к фиг.7. В одном варианте осуществления БКП 1000 может содержать основанную на смещении систему управления 1002, операционно связанную с узлом вариатора 1004. В одном варианте осуществления узел вариатора 1004 содержит солнце 1006 с передачей мощности за счет сцепления, расположенное радиально внутри нескольких практически сферических сателлитов 1008 с передачей мощности за счет сцепления и в контакте с ними. Солнце 1006 с передачей мощности за счет сцепления может выполняться вращающимся относительно главной оси 1010; для этого предусмотрены подшипники 1011. В одном варианте осуществления солнце 1006 с передачей мощности за счет сцепления зафиксировано в аксиальном направлении главной оси 1010 серьгами 1012, которые взаимодействуют с главной осью 1010 и подшипниками 1011.
[0069] В одном варианте осуществления каждый сателлит 1008 с передачей мощности за счет сцепления имеет комплект осей 1009А и 1009 В, которые предназначены для получения наклоняемой оси вращения для их соответствующего сателлита 1008 с передачей мощности за счет сцепления. Оси 1009А и 1009В сателлита могут выполняться вращающимися с сателлитом 1008 с передачей мощности за счет сцепления. Оси 1009А и 1009В сателлита практически соосны с центральной осью сателлита 1008. В других вариантах осуществления сателлит 1008 с передачей мощности за счет сцепления может выполняться с центральным отверстием, и при этом сателлит 1008 с передачей мощности за счет сцепления может операционно связываться с осью сателлита (не показанной) через подшипники, так что ось сателлита выполнена практически не вращающейся. Каждый из сателлитов 1008 с передачей мощности за счет сцепления операционно связан с первым статором 1014 и вторым статором 1016. Первый и второй статоры 1014, 1016 могут располагаться соосно с главной осью 1010.
[0070] В одном варианте осуществления БКП 1000 соосно с главной осью 1010 может располагаться входная ведущая деталь 1018. Входная ведущая деталь 1018 может конструктивно исполняться для получения входной мощности, например, от звездочки, шкива или иным подходящим соединением. В одном варианте осуществления входная ведущая деталь 1018 соединена с торсионной плитой 1019, которая соединена с первым узлом генератора аксиальной силы 1020. Узел генератора аксиальной силы 1020 операционно соединен с первым кольцом 1022, который по функции может быть практически идентичным кольцу 102 (фиг.1А). Первое кольцо 1022 конструктивно исполнено так, чтобы контактировать с каждым из сателлитов 1008 с передачей мощности за счет сцепления. Второе кольцо 1024 конструктивно исполнено так, чтобы контактировать с каждым из сателлитов 1008 с передачей мощности за счет сцепления. Второе кольцо 1024 по функции может быть практически идентичным кольцу 104 (фиг.1А). В одном варианте осуществления второе кольцо 1024 соединено со вторым узлом генератора аксиальной силы 1026. Второй узел генератора аксиальной силы 1026 может быть практически идентичным первому узлу генератора аксиальной силы 1020. В некоторых вариантах осуществления, узлы генераторов аксиальной силы 1020 и 1026 могут быть практически идентичными зажимающим механизмам генераторов силы, описанным в заявке на патент согласно Договору о патентной кооперации PCT/US2007/023315.
[0071] При работе БКП 1000 входная мощность может передаваться на входную ведущую деталь 1018 посредством, например, звездочки. Входная ведущая деталь 1018 через торсионную пластину 1019 может передавать мощность на первый генератор аксиальной силы 1020. Первый генератор аксиальной силы 1020 может передавать мощность на сателлиты 1008 с передачей мощности за счет сцепления через поверхность сопряжения сцепления или трения между первым кольцом 1022 и каждым из сателлитов 1008 с передачей мощности за счет сцепления. Сателлиты 1008 с передачей мощности за счет сцепления передают мощность на оболочку ступицы 1028 через второе кольцо 1024 и второй генератор аксиальной силы 1026. Изменение передаточного числа по частоте вращения и, следовательно, изменение передаточного числа по крутящему моменту, сопровождается наклоном оси вращения сателлитов 1008 с передачей мощности за счет сцепления. В одном варианте осуществления наклон оси вращения сателлитов 1008 с передачей мощности за счет сцепления сопровождается поворотом первого статора 1014, который может быть практически идентичным первому статору 516 (фиг.4-5С).
[0072] Обратимся теперь к фиг.8. В одном варианте осуществления БКП 2000 может быть практически идентичным БКП 1000. Чтобы не повторяться, будут описаны лишь различия между БКП 1000 и БКП 2000. В одном варианте осуществления БКП 2000 содержит солнце 2007 с передачей мощности за счет сцепления, расположенное радиально внутри нескольких практически сферических сателлитов 1008 с передачей мощности за счет сцепления и в контакте с ними. Солнце 2007 с передачей мощности за счет сцепления является практически цилиндрическим телом, которое может выполняться с клинообразным профилем по наружной окружности тела, если смотреть в поперечном сечении в плоскости страницы фиг.8. Солнце 2007 с передачей мощности за счет сцепления может выполняться контактирующим с каждым из сателлитов 1008 с передачей мощности за счет сцепления соответственно в первом и втором местах 2008 и 2009. Системы координат с началом в точке контакта и кинематические зависимости, описанные со ссылками на контактную зону 3 (фиг.1A-1F), могут подобным образом использоваться и для мест контакта 2008 и 2009. При работе БКП 2000 солнце 2007 с передачей мощности за счет сцепления практически аксиально зафиксировано уравновешивающими аксиальными силами в местах контакта 2008 и 2009. Кроме того, в некоторых вариантах осуществления первое и второе кольца 1022, 1024 конструктивно исполнены такими, чтобы обеспечивать достаточное радиальное кинематическое ограничение для сателлитов 1008 с передачей мощности за счет сцепления; в соответствии с этими вариантами осуществления, из различных вариантов осуществления БКП, раскрытых в настоящем описании, солнце 2007 с передачей мощности за счет сцепления и подшипники 1011 можно убрать.
[0073] Обратимся к фиг.9. В одном варианте осуществления основанная на смещении система управления 1002 может содержать рычаг 1030, который может конструктивно исполняться для зацепления с ведущей деталью 1032 статора. Ведущая деталь 1032 статора может зацепляться с первой пластиной статора 1014 посредством, например, нескольких штырей или иных подходящих крепежных деталей или соединений (не показанных). В одном варианте осуществления ведущая деталь 1032 статора может представлять собой в основном полое цилиндрическое тело. Ведущая деталь 1032 статора может иметь на одной конце фланец 1031, предназначенный для облегчения соединения ведущей детали 1032 статора с первой пластиной статора 1014. Ведущая деталь 1032 статора может выполняться с канавкой, которая может предназначаться для вставки серьги 1035 для удерживания подшипника, например.
[0074] В одном варианте осуществления первая пластина статора 1014 может конструктивно исполняться для поворота относительно главной оси 1010. Например, к первой пластине статора 1014 и к ведущей детали 1032 статора может крепиться втулка 1033. Втулка 1033 может располагаться соосно относительно главной оси 1010. В одном варианте осуществления для взаимодействия с главной осью 1010, чтобы аксиально удерживать втулку 1033, может предусматриваться гайка 1034. В некоторых вариантах осуществления вторая пластина статора 1016 может соединяться с главной осью 1010 посредством шлицевого соединения 1035 или иного подходящего соединения, передающего крутящий момент, так, что вторая пластина статора 1016 является практически не вращающейся относительно главной оси 1010.
[0075] При работе БКП 1000 рычаг 1030 может поворачиваться относительно главной оси 1010, чтобы при этом создавать угловой поворот ведущей детали 1032 статора относительно главной оси 1010. Рычаг 1030 можно поворачивать вручную посредством системы тяг и рычагов или троса (не показано). В некоторых вариантах осуществления рычаг 1030 может операционно соединяться с электронным приводом (не показанным), таким, как электродвигатель постоянного тока или сервопривод. В некоторых вариантах осуществления рычаг 1030 может операционно соединяться с гидравлическим приводом (не показанным). В других вариантах осуществления ведущая деталь 1032 статора может соединяться непосредственно с приводом, таким, как любой из вышеупомянутых приводов. Угловой поворот ведущей детали 1032 статора придает угловое смещение (β) первой пластине статора 1014 относительно второй пластины статора 1016. Как описано выше со ссылками на БКП 500, угловой поворот первой пластины статора 1014 относительно второй пластины статора 1016 может обеспечить наклон оси вращения сателлитов 1008 с передачей мощности за счет сцепления.
[0076] Обратимся теперь к фиг.10-13. В одном варианте осуществления первая пластина статора 1014 может быть практически дискообразным телом, имеющим центральное отверстие. В некоторых вариантах осуществления первая пластина статора 1014 может иметь ступицу 1036, выполненную вокруг центрального отверстия. Ступица 1036 может иметь несколько отверстий 1038, предназначенных для крепления первой пластины статора 1014 к ведущей детали 1032 статора. На поверхности первой пластины статора 1014 могут быть выполнены несколько радиально смещенных пазов 1040. Радиально смещенные пазы 1040 могут конструктивно исполняться таким образом, чтобы обеспечивать поддержку сателлитов 1008 с передачей мощности за счет сцепления посредством контакта, например, с несколькими роликами 1042 (см. фиг.9), которые операционно соединены с каждой из осей 1009 шаров. Вторая пластина статора 1016 может иметь несколько радиальных пазов 1044. Радиальные пазы 1044 могут конструктивно исполняться таким образом, чтобы взаимодействовать с роликами 1042. Фиг.10 иллюстрирует примерное расположение радиально смещенных пазов 1040 относительно радиальных пазов 1044. Для описания к БКП 1000 применены глобальные координаты 1047 (фиг.9). Следовательно, радиальные пазы 1044 можно рассматривать как проекции на первую пластину статора 1014 в плоскости xg-yg. На фиг.10 радиальные пазы 1044 показаны пунктирными линиями.
[0077] Обратимся конкретно к фиг.11А и 11В. В одном варианте осуществления, радиально смещенные пазы 1040 и радиальные пазы 1044 имеют ширину 1046. Ширина 1046 может подбираться соответствующей наружному диаметру ролика 1042. В варианте осуществления, представленном на фиг.10, радиальные пазы 1044 расположены вокруг второй пластины статора 1016 так, что радиально смещенные пазы 1040 не совпадают (то есть, смещены относительно их) с радиальными пазами 1044, как видно на проекции радиально смещенных пазов 1040 и радиальных пазов 1044 на плоскость xg-yg. Величина линейного смещения 1048 показана на фиг.11 с линиями разреза А-А и В-В. Линия сечения А-А практически делит на две части один радиально смещенный паз 1040, причем деление проходит практически на половине ширины 1046. Линия сечения В-В практически совпадает с осевой линией первой пластины статора 1014. Линия сечения В-В - это линия, перпендикулярная главной оси передачи zg (фиг.9). Линия сечения А-А - это линия, параллельная линии сечения В-В. Альтернативно, радиально смещенные пазы 1040 могут быть показаны имеющими угловое смещение 1049, определяемое линией построения 1050 и осевой линией 1051. Осевая линия 1051 может быть построена относительно диаметра первой пластины статора 1014. Линии построения 1050 для удобства показана в радиальном положении, совпадающим с центром оси 1009 сателлита, когда ось 1009 сателлита находится под углом наклона, практически равном нулю. Угловому смещению 1049 можно дать определение как угловое смещение между осевой линией 1051 и срединой радиально смещенных пазов 1040, лежащих вдоль линии построения 1050, причем середина радиально смещенного паза 1040 находится практически на половине ширины 1046. В одном варианте осуществления угловое смещение 1049 находится в пределах от 0 до 45 градусов. В некоторых вариантах осуществления, угловое смещение 1049 может составлять 5-20 градусов, предпочтительно, 8, 9, 10, 11 или 12 градусов.
[0078] Обратимся теперь к фиг.12 и 13. В одном варианте осуществления первая пластина статора 1014 может иметь выступающую часть 1052 для ограничения перемещения, расположенную вокруг центрального отверстия. Первая пластина статора 1014 может иметь практически тороидальный вырез зазора 1054. Вырез зазора 1054 может выполняться на поверхности первой пластины статора 1014. Вырез зазора 1054 может иметь криволинейный профиль, если смотреть в плоскости фиг.13. Подобным образом, впадина 1041 и (или) стенка 1043 радиально смещенного паза 1040 могут иметь криволинейный профиль, если смотреть в плоскости фиг.12. При работе БКП 1000 радиально смещенные пазы 1040 направляют ролики 1042. Выступающая часть 1052 для ограничения перемещения может создать механический предел пути роликов 1042 в радиально смещенных пазах 1040. В некоторых вариантах осуществления выступающая часть 1052 для ограничения перемещения может выполняться на радиально наружной периферии первой пластины статора 1014.
[0079] Обратимся теперь к фиг.14 и 15. В одном варианте осуществления вторая пластина статора 1016 может быть практически дискообразным телом, имеющим центральное отверстие 1056. Центральное отверстие 1056 может выполняться так, чтобы обеспечить сцепление второй пластины статора 1016 с главной осью 1010 посредством, например, шлицевого соединения, насечек или сварки. Радиальные пазы 1044 могут располагаться на определенном угловом расстоянии между собой вокруг центрального отверстия 1056. В некоторых вариантах осуществления радиальные пазы 1044 могут проходить на второй пластине статора 1016 от ближней периферии пластины статора 1016 или от точки вблизи ее к центральному отверстию 1056. Радиальный паз 1044 может иметь криволинейный профиль, если смотреть в плоскости фиг.15. В одном варианте осуществления вторая пластина статора 1016 может иметь выступающую часть 1057 для ограничения перемещения. Выступающая часть 1057 для ограничения перемещения может выполняться радиально вокруг центрального отверстия 1056 и проходить из него в аксиальном направлении. Выступающая часть 1057 для ограничения перемещения может выполняться практически идентично выступающей части 1052 для ограничения перемещения.
[0080] Обратимся теперь к фиг.16 и 17. В одном варианте осуществления ось 1009 сателлита может выполняться с канавкой 1070, предназначенной для вставки серьги 1072. Серьга 1072 может обеспечить установку ролика 1042 на оси 1009 сателлита. В одном варианте осуществления на оси 1009 сателлита может быть предусмотрена поверхность 1074, служащая опорой для подшипника 1076. Подшипник 1076 может конструктивно исполняться соответствующим внутреннему диаметру ролика 1042. В некоторых вариантах осуществления подшипник 1076 запрессован в ролик 1042. В других вариантах осуществления ролик 1042 может конструктивно исполняться так, что вмещает в себя шарикоподшипник 1077. На оси 1009 сателлита может быть предусмотрена опорная поверхность 1078, предназначенная для установки подшипника 1077 на оси 1009 сателлита.
[0081] По-прежнему обращаемся к фиг.16 и 17. В одном варианте осуществления ролик 1042 представляет собой практически цилиндрическое тело, имеющее центральное отверстие. Центральное отверстие может выполняться таким, чтобы принимать подшипник 1076 или подшипник 1077. Ролик 1042 может иметь коронную наружную окружность цилиндрического тела. Коронная наружная окружность предназначена для соединения оси 1009 сателлита с первой и второй пластинами статора 1014 и 1016.
[0082] Следует отметить, что в вышеприведенном описании даны размеры некоторых компонентов или узлов. Упомянутые размеры или диапазоны размеров даны, чтобы в максимально возможной мере обеспечить выполнение некоторых юридических требований, таких как требования к лучшему варианту осуществления. Однако объем изобретений, раскрытых в настоящем описании, должен определяться исключительно формулой изобретения, и, следовательно, ни один из упомянутых размеров не должен рассматриваться ограничивающим объем изобретения конкретными вариантами осуществления, за исключением конкретных размеров или диапазонов размеров, оговоренных в пунктах формулы изобретения.
[0083] В вышеприведенном описании подробно описаны некоторые варианты осуществления. Следует, однако, понимать, что как бы подробно они ни были описаны в тексте, изобретение может осуществляться многими путями. И как уже говорилось, следует отметить, что использование конкретной терминологии при описании некоторых признаков или аспектов изобретения не должно рассматриваться как подразумевающее, что этой терминологии в настоящем описании даются новые определения, чтобы она была ограничена включением любых конкретных характеристик признаков или аспектов изобретения, с которыми эта терминология связана.
Реферат
Изобретение относится к торовым вариаторам, а именно к конструкциям торовых колес вариатора (пластин статора). Пластина статора для бесступенчатой коробки передач содержит несколько сателлитов с передачей мощности за счет сцепления, установленных вокруг главной оси вращения. При этом пластина статора содержит дискообразное тело, установленное коаксиально главной оси вращения, и несколько радиально смещенных направляющих, расположенных на лицевой поверхности дискообразного тела и установленных под углом относительно центра. Причем каждая из радиально смещенных направляющих смещена линейно от осевой линии дискообразного тела. Достигаются улучшенные эксплуатационные характеристики. 4 н. и 10 з.п. ф-лы, 17 ил.
Формула
и несколько радиально смещенных направляющих, расположенных на лицевой поверхности дискообразного тела и установленных под углом относительно центра, причем каждая из радиально смещенных направляющих смещена линейно от осевой линии дискообразного тела.
- дискообразное тело, имеющее лицевую поверхность и центр, установленное коаксиально главной оси вращения; и
- несколько смещенных под углом пазов, выполненных на лицевой поверхности дискообразного тела и расположенных под углом относительно его центра, при этом каждый из пазов расположен под углом относительно центральной линии дискообразного тела.
- первое дискообразное тело, имеющее лицевую поверхность и центр;
- второе дискообразное тело, имеющее лицевую поверхность и центр, установленное коаксиально первому дискообразному телу;
- несколько смещенных под углом пазов, выполненных на лицевой поверхности первого дискообразного тела и расположенных под углом относительно центра первого дискообразного тела, при этом каждый из пазов ориентирован под углом относительно центральной линии дискообразного тела;
при этом центральная линия дискообразного тела ориентирована перпендикулярно оси вращения, формирующую систему координат, в которой ось Z соответствует главной оси вращения, ось Y соответствует центральной линии, а ось X перпендикулярна упомянутым осям Z и Y;
причем угловые направляющие смещения лежат в плоскости, образованной осями X и Y, а каждый тяговый планетарный механизм установлен с возможностью наклона на плоскости, образованной осями Y и X.
- первое дискообразное тело, имеющее первый центр;
- второе дискообразное тело, имеющее второй центр, расположенный коаксиально первому центру, образующему главную ось;
- несколько радиально смещенных пазов, образованных под углом относительно центра первого дискообразного тела, при этом каждая из радиально смещенных направляющих имеет линейное смещение относительно центральной линии первого дискообразного тела;
при этом центральная линия первого дискообразного тела ориентирована перпендикулярно главной оси вращения, формирующую систему координат, в которой ось Z соответствует главной оси вращения, ось Y соответствует центральной линии, а ось X перпендикулярна упомянутым осям Z и Y;
причем радиально смещенные направляющие смещения лежат в плоскости, образованной осями X и Y.
Комментарии