Устройство и методика производства и сборки устройства космического корабля в космосе - RU2732637C2
Код документа: RU2732637C2
Чертежи









































Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет согласно предварительной заявке на патент США № 62/200,568, поданной 3 августа 2015 года и полностью включенной в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее раскрытие в целом относится к изготовлению и, в частности, к послойному синтезу устройств космического корабля в космосе.
УРОВЕНЬ ТЕХНИКИ
[0003] Процессы послойного синтеза последовательно скрепляют вместе материалы, чтобы сформировать завершенную деталь. Создание детали управляется компьютером и производит деталь в соответствии с трехмерными представлениями желаемой детали или с другими инструкциями по созданию детали. Материал, также известный как "исходное сырье", может быть скреплен через сплавление слоев или других небольших частей материала вместе.
[0004] Многие текущие методики послойного синтеза производят детали ограниченного размера. Размер произведенной детали ограничен строительным пространством устройства послойного синтеза. Строительное пространство представляет собой область, в которой устройство послойного синтеза может создать деталь. Строительное пространство часто задается в плоскости XY областью, в которой устройство послойного синтеза может осаждать или иным образом скреплять исходное сырье при формировании желаемой детали. Например, в устройствах моделирования методом наплавления плоскость XY задается посредством поперечного движения в плоскости XY экструдера, который создает слои желаемой детали. Начальный слой осаждается на модельную платформу или лоток, и прикрепляются последующие слои. Строительное пространство ограничено в направлении Z максимальным относительным достижимым расстоянием модельной платформой и экструдером или другим устройством скрепления. В некоторых устройствах послойного синтеза модельная платформа соединена с шаговым двигателем по оси z и перемещается по мере создания детали. В других устройствах экструдер перемещается по оси z в дополнение к осям x и y.
[0005] Размер строительного пространства является неотъемлемым ограничением текущих устройств послойного синтеза. Поскольку это заданное пространство, цельная деталь никогда не может стать больше, чем строительное пространство данной машины. Это создает серьезную ограничивающую проблему, при которой никакой объект не может быть изготовлен больше, чем машина, которая его создает. Сегодняшние машины послойного синтеза наращивают размер пространства печати, чтобы размещать более крупные детали, но на этих машинах по-прежнему существует неизбежное ограничение размера. Например, ни одна машина послойного синтеза, очевидно, не могла бы быть достаточно большой, чтобы построить целый небоскреб в своем строительном пространстве; машина была бы слишком большой.
[0006] Ограничение размера, накладываемое на все машины послойного синтеза, является узким местом. Это сильно ограничивает возможные объекты, которые могли бы быть построены без какой-либо пост-обработки, чтобы создать окончательную деталь или структуру.
[0007] Были созданы такие процессы, как описанные в заявке на патент США № 14/020,658, Дуглас, A. и др., которые производят большие детали, разделяя проект желаемой детали на субдетали, которые могут быть произведены через устройства послойного синтеза, имеющие ограниченные строительные пространства. К конструкции каждой субдетали добавлены соединительные функции, позволяющие субдеталям соединяться вместе после производства.
[0008] Космические корабли очень ограничены и по стартовому объему, и по стартовой массе. Когда космический корабль запускается с земли, он подвергается значительным нагрузкам, которые могут привести к поломкам систем в космосе.
[0009] С учетом предыдущего необходимы устройства послойного синтеза, которые производят устройства космического корабля в космосе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] Это описание сущности изобретения дано для того, чтобы представить выбор концепций. Эти концепции далее рассмотрены в подробном описании. Это описание сущности не предназначено для идентификации ключевых признаков или существенных признаков предмета этого раскрытия, и это описание сущности не предназначено в качестве помощи в определении объема раскрытого изобретения.
[0011] Варианты осуществления относятся к системе и способу для сборки космического корабля, такого как спутник в космосе. Система содержит строительное устройство, имеющее строительную область и компонент скрепления материала для приема частей материала, который используется для производства объекта, по меньшей мере один захват в строительной области для осуществления контакта с объектом для обеспечения опоры и обеспечения по меньшей мере одного элемента из элемента отвода тепла для объекта. Система также содержит элемент отвода холода для объекта и путь электрического рассеяния от объекта. Система дополнительно содержит механизм перемещения для перемещения строительного устройства относительно объекта, чтобы поместить строительное устройство в позицию для дальнейшего производства объекта.
[0012] Способ содержит построение посредством устройства послойного синтеза протяженных структур (ESAMM) по меньшей мере одного элемента из детали космического корабля и структуры с использованием материала послойного синтеза в соответствии по меньшей мере с одной проектной схемой по меньшей мере в одной среде из космического пространства, среды с микрогравитацией и мореплавательной среды. Способ дополнительно содержит выполнение по меньшей мере одного действия из рассеивания тепла, рассеивания холода и отвода электричества по меньшей мере от одного элемента из детали космического корабля и структуры с использованием по меньшей мере одного захвата, который является частью устройства ESAMM и находится в контакте по меньшей мере с одним элементом из детали космического корабля и структуры. Способ также содержит технический контроль по меньшей мере одного элемента из детали космического корабля и структуры при изготовлении. Способ дополнительно содержит сборку и интеграцию посредством устройства ESAMM по меньшей мере одного элемента из детали космического корабля и структуры с помощью по меньшей мере одного элемента из электронного узла и комплектующего компонента, чтобы сформировать систему космического корабля.
[0013] Один способ содержит построение посредством устройства послойного синтеза протяженных структур (ESAMM) по меньшей мере одного элемента из детали космического корабля и структуры с использованием материала послойного синтеза в соответствии по меньшей мере с одной проектной схемой по меньшей мере в одной среде из космического пространства, среды с микрогравитацией и мореплавательной среды. Способ дополнительно содержит выполнение по меньшей мере одного действия из рассеивания тепла, рассеивания холода и отвода электричества по меньшей мере от одного элемента из детали космического корабля и структуры с использованием по меньшей мере одного захвата, который является частью устройства ESAMM и находится в контакте по меньшей мере с одним элементом из детали космического корабля и структуры. Способ также содержит технический контроль посредством устройства ESAMM по меньшей мере одного элемента из детали космического корабля и структуры при изготовлении и сборку и интеграцию посредством устройства ESAMM по меньшей мере одного элемента из детали космического корабля и структуры с помощью по меньшей мере одного элемента из электронного узла и комплектующего компонента, чтобы сформировать систему космического корабля.
[0014] Другой способ содержит нанесение первого слоя материала из компонента скрепления материала для производства объекта в первом направлении и нанесение второго слоя материала из компонента скрепления материала для производства объекта во втором направлении.
[0015] Другой способ содержит создание объекта с помощью материала, вытесняемого из компонента скрепления материала, который является частью строительного устройства с неограниченной строительной областью по меньшей мере в одном направлении, в котором строится объект, и применение по меньшей мере одного демпфирующего механизма к строящемуся объекту в адаптивном местоположении на объекте по мере построения объекта.
[0016] Другая система содержит строительное устройство, имеющее строительную область и компонент скрепления материала для приема частей материала, который используется для производства объекта. Система также содержит по меньшей мере одно контактное устройство, находящееся в физическом контакте с объектом во время производства по меньшей мере части объекта, контактное устройство обеспечивает по меньшей мере один элемент из элемента отвода тепла для объекта, элемента отвода холода для объекта и пути электрического рассеяния от объекта. Система дополнительно содержит механизм перемещения для перемещения строительного устройства относительно объекта, чтобы поместить строительное устройство в позицию для дальнейшего производства объекта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Признаки и преимущества настоящего раскрытия станут более очевидными из изложенного ниже подробного описания, взятого вместе с чертежами, на которых одинаковые ссылочные номера указывают идентичные или функционально подобные элементы.
[0018] Фиг. 1 - вид в перспективе устройства послойного синтеза протяженных структур, производящего протяженную деталь, в соответствии с аспектом настоящего раскрытия.
[0019] Фиг. 2 - покомпонентный вид в перспективе устройства послойного синтеза протяженных структур, производящего протяженную деталь, в соответствии с аспектом настоящего раскрытия.
[0020] Фиг. 3 - вид снизу в перспективе устройства послойного синтеза протяженных структур, производящего протяженную деталь, и показывающий систему скрепления материала, в соответствии с аспектом настоящего раскрытия.
[0021] Фиг. 4А и 4B - виды устройства послойного синтеза протяженных структур, содержащего колеса зубчатой передачи и производящего деталь, имеющую направляющую геометрическую форму с зубчатой передачей, в соответствии с аспектом настоящего раскрытия.
[0022] Фиг. 5 - покомпонентный вид в перспективе устройства послойного синтеза протяженных структур, содержащего колеса зубчатой передачи и производящего протяженную деталь, имеющую направляющую геометрическую форму, в соответствии с аспектом настоящего раскрытия.
[0023] Фиг. 6 - вид в перспективе устройства послойного синтеза протяженных структур, содержащего колеса зубчатой передачи с полусферическими зубцами и производящего деталь, имеющую направляющую геометрическую форму, в соответствии с аспектом настоящего раскрытия.
[0024] Фиг. 7 - вид в перспективе устройства послойного синтеза протяженных структур, содержащего валики и производящего деталь, имеющую направляющую геометрическую форму, в соответствии с аспектом настоящего раскрытия.
[0025] Фиг. 8 - покомпонентный вид устройства послойного синтеза протяженных структур, содержащее валики, в соответствии с аспектом настоящего раскрытия.
[0026] Фиг. 9 - вид сбоку устройства послойного синтеза протяженных структур, содержащего гусеницы, в соответствии с аспектом настоящего раскрытия.
[0027] Фиг. 10 - вид снизу в перспективе устройства послойного синтеза протяженных структур, содержащего гусеницы, в соответствии с аспектом настоящего раскрытия.
[0028] Фиг. 11А и 11B - виды устройства послойного синтеза протяженных структур, содержащего червячные передачи и производящего деталь, имеющую направляющую геометрическую форму, в соответствии с аспектом настоящего раскрытия.
[0029] Фиг. 12 - вид сбоку устройства послойного синтеза протяженных структур, содержащего реактивные двигатели малой тяги, в соответствии с аспектом настоящего раскрытия.
[0030] Фиг. 13 - вид сбоку устройства послойного синтеза протяженных структур, содержащего реактивные двигатели малой тяги и захватывающие механические руки, в соответствии с аспектом настоящего раскрытия.
[0031] Фиг. 14 - вид сбоку устройства послойного синтеза протяженных структур, содержащего реактивные двигатели малой тяги и захватывающие механические руки, и изображающее иллюстративный источник материала, в соответствии с аспектом настоящего раскрытия.
[0032] Фиг. 15 - вид в перспективе устройства послойного синтеза протяженных структур, имеющего механические руки с элементами точного и грубого управления, в соответствии с аспектом настоящего раскрытия.
[0033] Фиг. 16 - вид в перспективе устройства послойного синтеза протяженных структур, имеющего несколько компонентов скрепления материала, в соответствии с аспектом настоящего раскрытия.
[0034] Фиг. 17 - вид сбоку устройства послойного синтеза протяженных структур, имеющего дополнительные механические руки, каждая механическая рука включает в себя дополнительный компонент скрепления, в соответствии с аспектом настоящего раскрытия.
[0035] Фиг. 18 - вид в перспективе устройства послойного синтеза протяженных структур, имеющего шарнирную механическую руку, включающую в себя сканирующее устройство, в соответствии с аспектом настоящего раскрытия.
[0036] Фиг. 19 - вид в перспективе устройства послойного синтеза протяженных структур, включающего в себя строительный лоток, в соответствии с аспектом настоящего раскрытия.
[0037] Фиг. 20 - вид сбоку устройства послойного синтеза протяженных структур, имеющего простирающиеся вертикально ориентированные валики, в соответствии с аспектом настоящего раскрытия.
[0038] Фиг. 21 - вид в перспективе устройства послойного синтеза протяженных структур, создающего круглый диск, в соответствии с аспектом настоящего раскрытия.
[0039] Фиг. 22 - вид в перспективе устройства послойного синтеза протяженных структур, создающего большой цилиндр, в соответствии с аспектом настоящего раскрытия.
[0040] Фиг. 23 - вид в перспективе устройства послойного синтеза протяженных структур, создающего структуру с несколькими фермами, в соответствии с аспектом настоящего раскрытия.
[0041] Фиг. 24 - блок-схема последовательности этапов, демонстрирующая иллюстративный процесс для создания детали, а именно, протяженной структуры, с использованием устройства послойного синтеза протяженных структур, в соответствии с аспектом настоящего раскрытия.
[0042] Фиг. 25А и 25B - виды устройства послойного синтеза протяженных структур для производства космического корабля в космосе в соответствии с аспектом настоящего раскрытия.
[0043] Фиг. 26 - частичный вид устройства послойного синтеза протяженных структур, производящего протяженную деталь, в соответствии с аспектом настоящего раскрытия.
[0044] Фиг. 27A-27D иллюстрируют виды печатной структуры, структура захвачена и прицеплена в позиции, и увеличенный вид позиции сцепления в соответствии с аспектами настоящего раскрытия.
[0045] Фиг. 28A-28E - виды в перспективе состыкованных парных печатных структур в соответствии с аспекты настоящего раскрытия.
[0046] Фиг. 29А - блок-схема комплекта космического корабля в соответствии с аспектом настоящего раскрытия.
[0047] Фиг. 29B - блок-схема последовательности этапов процесса для производства космического корабля или спутника в космосе в соответствии с аспекты настоящего раскрытия.
[0048] Фиг. 30А и 30B - виды собираемого космического корабля в соответствии с аспекты настоящего раскрытия.
[0049] Фиг. 31 - вид устройства послойного синтеза протяженных структур, собирающего детали для космического корабля в космосе, в соответствии с аспектами настоящего раскрытия.
[0050] Фиг. 32 - другой вид устройства послойного синтеза протяженных структур, собирающего/производящего детали для космического корабля в космосе, в соответствии с аспектами настоящего раскрытия.
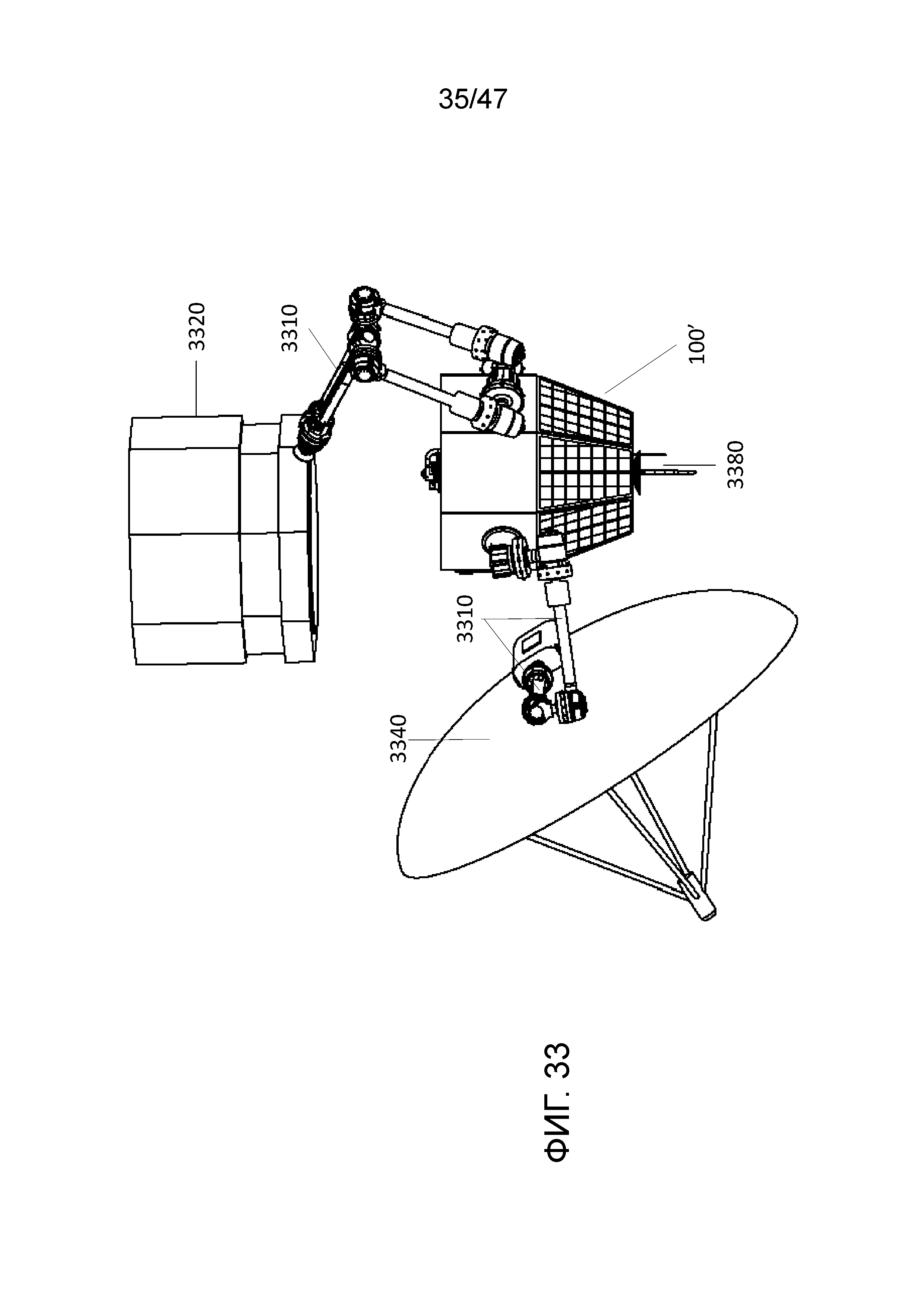
[0051] Фиг. 33 - еще один вид устройства послойного синтеза протяженных структур, собирающего/производящего детали для космического корабля в космосе, в соответствии с аспектами настоящего раскрытия.
[0052] Фиг. 34A-34D - деталь, произведенная в космосе, в соответствии с аспектами настоящего раскрытия.
[0053] Фиг. 35 - еще один вид устройства послойного синтеза протяженных структур, собирающего/производящего детали для космического корабля в космосе, в соответствии с аспектами настоящего раскрытия.
[0054] Фиг. 36 - еще один вид устройства послойного синтеза протяженных структур, собирающего/производящего детали для космического корабля в космосе, в соответствии с аспектами настоящего раскрытия.
[0055] Фиг. 37 - устройство послойного синтеза протяженных структур, собирающее/производящее космический корабль в космосе, в соответствии с аспектами настоящего раскрытия.
[0056] Фиг. 38A-38C - внутренний вид устройства послойного синтеза протяженных структур в соответствии с аспектами настоящего раскрытия.
[0057] Фиг. 39 - вид блок-схемы вычислительной системы в соответствии с аспектом настоящего изобретения.
[0058] Фиг. 40А и 40B - виды устройства и детали, которые могут иметь смещающийся центр тяжести.
[0059] Фиг. 41А и 41B - виды структуры, которая может быть произведена в космосе.
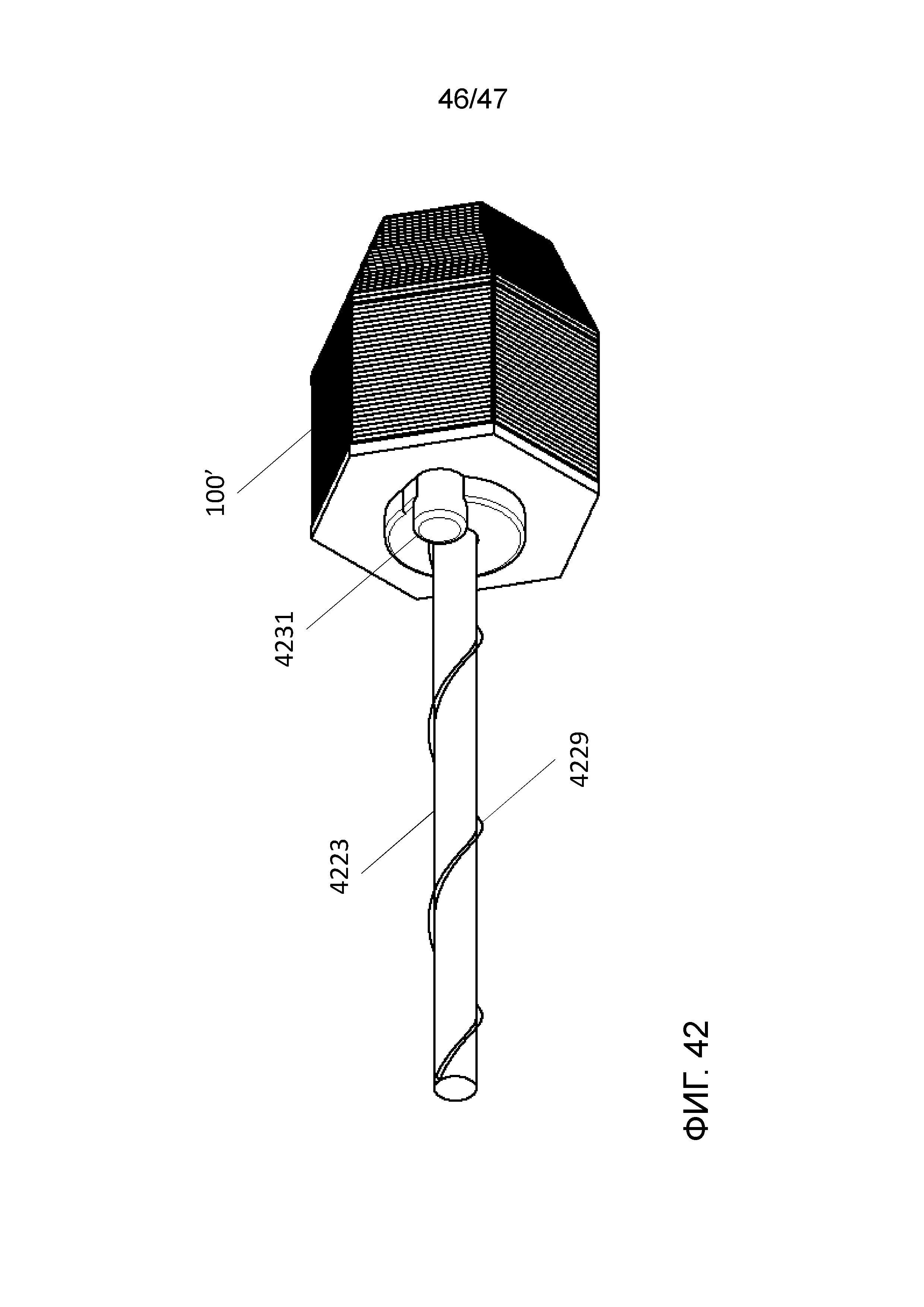
[0060] Фиг. 42 - вариант осуществления структуры, которая может быть произведена в космосе.
[0061] Фиг. 43 - вариант осуществления структуры, которая может быть произведена в космосе.
ПОДРОБНОЕ ОПИСАНИЕ
[0062] Варианты осуществления описаны в настоящем документе со ссылкой на приложенные фигуры, на которых одинаковые номера для ссылок используются на всех фигурах для обозначения подобных или эквивалентных элементов. Фигуры изображены без соблюдения масштаба и обеспечены лишь для иллюстрации аспектов, раскрытых в настоящем документе. Несколько раскрытых аспектов описаны ниже со ссылкой на неограничивающие иллюстративные применения для примера. Следует понимать, что многочисленные конкретные подробности, соотношения и способы сформулированы, чтобы обеспечить полное понимание вариантов осуществления, раскрытых в настоящем документе. Специалист в релевантной области техники, однако, без затруднений признает, что раскрытые варианты осуществления могут быть осуществлены без одной или более конкретных подробностей или с помощью других способов. В других случаях известные структуры или операции в подробностях не показываются, чтобы избежать затруднения понимания аспектов, раскрытых в настоящем документе. Варианты осуществления не ограничены проиллюстрированным порядком действий или событий, поскольку некоторые действия могут происходить в другом порядке и/или одновременно с другими действиями или событиями. Кроме того, не все проиллюстрированные действия или события требуются для реализации методологии в соответствии с вариантами осуществления.
[0063] Несмотря на то, что числовые диапазоны и параметры, формулирующие широкий контекст, являются приближениями, численные значения, сформулированные в конкретных неограничивающих примерах, представлены максимально точно. Однако любое численное значение неотъемлемо содержит неизбежные ошибки, обязательно происходящие в результате стандартного отклонения, присутствующего в их соответствующих тестовых измерениях. Кроме того, следует понимать, что все диапазоны, раскрытые в настоящем документе, охватывают любые и все поддиапазоны, включенные в них. Например, диапазон "меньше 10" может включать в себя любые и все поддиапазоны между (и включительно) минимальным значением 0 и максимальным значением 10, то есть, любые и все поддиапазоны, имеющие минимальное значение, равное или больше 0, и максимальное значение, равное или меньше 10, например, 1-4.
[0064] Настоящее раскрытие направлено на устройство, системы и способы, которые обеспечивают возможность послойного синтеза больших цельных структур. Такие структуры могут быть построены без обеспечения большего строительного пространства, чем производимая структура. В различных аспектах устройства в соответствии с настоящим раскрытием могут функционировать в таких средах, как, но без ограничения, космическое пространство, среды с микрогравитацией, наземные среды, среды со свободным падением, мореплавательные среды, среды с переменными усилиями, другие управляемые среды, среда с невесомостью и т.п. Устройства в соответствии с настоящим раскрытием могут создавать желаемые детали как объекты, структуры, расходные детали, сменные детали, экспериментальные объекты, ремонтные подручные средства, части любого из упомянутого выше и т.п. Инструкции для производства таких деталей могут быть заранее запрограммированы в устройстве, обеспечены локальным вычислительным устройством (например, вычислительным устройством на космической станции, содержащей устройство послойного синтеза), переданы из удаленного местоположения (например, приняты от удаленного сервера, приняты от вычислительного устройства на другом небесном теле или космическом корабле), или принятый или сформированы в другом местоположении, очевидном для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе.
[0065] Устройства послойного синтеза протяженных структур и соответствующие способы, раскрытые в настоящем документе, имеют много применений для строительства больших структур, деталей и объектов. Они могут использоваться для постройки любого объекта, который больше, чем строительное пространство типичной машины. Такие применения включают в себя, но без ограничения, создание: балок для строительства зданий; инфраструктуры больших небоскребов; больших антенн и устройств связи; структур, спроектированных с использованием прежнего опыта, созданных специально для их предусмотренного применения; больших структур в космосе; каналов и трубопроводов для строительства, в том числе трубопроводов с поворотами на 90°; фюзеляжей или их частей (например, фюзеляжей самолета); шасси или рамы транспортного средства; частей судов, подводных лодок и т.п.; камер высокого давления; и других больших и малых объектов.
[0066] При создании структуры в космосе возникают несколько проблем и возможностей. В целом создание структуры в космосе предпочтительно по сравнению со строительством этой структуры на земле и ее транспортировки в космос для окончательной сборки. Посредством создания структуры в космосе эта структура не подвергается напряжениями вследствие силы тяжести, вибрации и дополнительным усилиям ускорения при запуске, и, таким образом, она требует намного меньшей массы и избыточной прочности. В результате деталь может весить намного меньше и занимать намного меньше объема полезной нагрузки.
[0067] Крупномасштабные детали не могут быть достигнуты простой транспортировкой эквивалента современной машины послойного синтеза в космос из-за ограничений "строительного пространства". Устройства в соответствии с настоящим раскрытием могут использоваться для постройки больших деталей, цельных структур и других объектов в космосе. Примеры потенциальных космических применений включают в себя постройку: больших структур; мега-структур; космических станций; космической инфраструктуры солнечной энергии; спутниковых компонентов; стыковочных станций; топливных складов; инфраструктуры разработки недр астероидов; космического корабля (пилотируемого или беспилотного); инфраструктуры освоения планет; структур, спроектированных с использованием прежнего опыта, созданных специально для их предусмотренного применения; жестких балок и ферм с размерами больше, чем у развертываемых; или частей любого из упомянутого выше.
[0068] Устройства в соответствии с настоящим раскрытием обеспечивают возможность производства цельных деталей, которые больше, чем какое-либо заданное строительное пространство. С помощью способа послойного синтеза протяженных структур либо устройство, либо создаваемая деталь перемещается по мере постройки трехмерной детали. Во время создания строящаяся деталь простирается за пределы строительной области. Устройство может перемещаться посредством сопряжения с червячными передачами, колесами, двигательной установкой или другими известными способами подачи.
[0069] Спутники и другие космические корабли, изготовленные по меньшей мере частично из сырья и сборных компонентов, могут обеспечить существенное преимущество для конструкции и исполнения миссии всей системы. Устройства в соответствии с настоящим раскрытием могут изготавливать структуры неопределенной длины, прикрепляя и встраивая компоненты вдоль пути. Эта методология допускает оптимальную эффективность упаковки и использование массы в стартовой полезной нагрузке.
[0070] Устройства в соответствии с настоящим раскрытием выполнены с возможностью строить, собирать и/или контролировать космический корабль или часть космического корабля. Устройство использует послойный синтез, а именно технологии машин послойного синтеза протяженных структур и автоматизированную манипуляцию, а также структурные и электрические механизмы. Такие устройства могут быть выполнены с возможностью ремонтировать и модифицировать существующий космический корабль в космосе. Технический контроль построенных структур и собранных компонентов происходит посредством устройств технического контроля, интегрированных в устройство или осуществляющих связь с устройством.
[0071] Различные устройства в соответствии с настоящим раскрытием могут функционировать в герметичной среде (например, в космическом корабле), в космическом пространстве, на небесном теле, будучи открытыми для воздействия солнечного излучения, больших экстремальных значений и перепадов температур, атомарного кислорода и т.п.
[0072] Теперь со ссылкой на фиг. 1-3 показаны различные виды устройства 100 послойного синтеза протяженных структур, которое производит деталь 102, в соответствии с различными аспектами настоящего раскрытия.
[0073] Термин "деталь" может быть использован в настоящем документе для обозначения объектов, созданных полностью или частично устройствами послойного синтеза протяженных структур, раскрытых в настоящем документе. Такие объекты могут представлять собой цельные структуры, которые простираются далеко от компонента скрепления материала по мере их создания. Иллюстративные структуры, такие как балки или опоры, в общем случае могут быть линейными в профиле. Другие структуры, такие как камера высокого давления, решетки для связи, трубопровод или части космического корабля, могут иметь более сложные или нерегулярные профили.
[0074] Устройство 100 послойного синтеза протяженных структур (иногда называемое устройством "ESAMM") может иметь корпус и/или раму 104, систему 202 скрепления материала и механизм 106 перемещения, выполненный с возможностью перемещать устройство послойного синтеза относительно детали во время создания детали. Система 202 скрепления материала может включать в себя подвижный компонент 204 скрепления материала, соединенный с системой 206 позиционирования компонента скрепления материала, такой как подача, показанная на фиг. 2. Система 206 позиционирования перемещает компонент 204 скрепления материала в устройстве 100. В различных аспектах система 202 скрепления материала включает в себя несколько компонентов 204 скрепления материала, перемещаемых через одну или более систем позиционирования или через части механизма перемещения.
[0075] В аспекте изобретения система 206 позиционирования представляет собой систему подачи. Система 206 подачи физически сопряжена с рамой 104 и поддерживается рамой 104. Система подачи может включать в себя несколько линейных приводов, ориентированных в одной или более осей. Каждый линейный привод включает в себя шаговый двигатель, соединенный с коробкой передач, которая вращает приводимую ходовым винтом линейную направляющую. Каретка присоединена к направляющей для перемещения, обеспечивая возможность точного позиционирования каретки и прикрепленных компонентов, таких как другие линейные приводы и компонент 204 скрепления материала.
[0076] В некоторых аспектах система 206 позиционирования опущена, и механизм 106 перемещения позиционирует компонент 204 скрепления материала.
[0077] Рама 104 может представлять собой единый фрагмент, например, отлитое или формованное изделие, или рама 104 может быть сформирована из нескольких фрагментов. Рама 104 может включать в себя несколько частей, вмещающих модульные и/или взаимозаменяемые компоненты (например, модули электроники управления, модули исходного сырья и т.п.). В некоторых аспектах рама 104 представляет собой бескаркасную структуру.
[0078] Система 202 скрепления материала может представлять собой часть устройства послойного синтеза, которая имеет стационарные детали, прикрепленные к раме 104 или к части рамы 104, а также одну или более подвижных частей, используемых для печати материалов, таких как компонент 204 скрепления материала, с тем чтобы компонент 204 скрепления материала мог перемещаться относительно рамы 104. Компонент 204 скрепления материала может представлять собой экструдер, который расплавляет принятое исходное сырье, такое как полимерное волокно, и помещает через систему 206 позиционирования и механизм 106 перемещения расплавленное волокно, чтобы создать желаемую деталь. Компонент 204 скрепления материала может содержать механизм выборочного лазерного спекания (SLS) или механизм прямого лазерного спекания металлов (для которого подвижный участок может являться частью системы сканера, которая является частью устройства 100). В некоторых аспектах компонент 204 скрепления материала может представлять собой сварочное устройство, такое как аппарат электродуговой сварки, аппарат лучевой сварки, аппарат кислородно-топливной или газовой сварки, аппарат контактной сварки или аппарат твердотельной сварки. В других аспектах компонент 204 скрепления материала может представлять собой устройство стереолитографии, струйную головку, головку для покрытия, устройство осаждения бетона или другого затвердевающего материала или любое другое устройство, очевидное для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе. Когда используются несколько компонентов 204 скрепления материала, такие несколько компонентов 204 скрепления материала могут скреплять или иным образом осаждать разные материалы или иметь разные характеристики (например, разные разрешения).
[0079] Традиционный принтер имеет пространство печати, которое задано диапазоном движения печатающей головки. Устройство 100 обеспечивает возможность создания цельной детали за пределами пространства печати, заданного принтером, тем самым обеспечивая расширенную область, доступную для создания детали 102, которой нет в традиционных машинах послойного синтеза.
[0080] Во время создания детали 102 устройство 100 перемещается относительно детали 102 и наоборот через механизм 106 перемещения. Механизм 106 перемещения может представлять собой любой один или более из различных механизмов подачи. Один такой механизм подачи представляет собой подвижный механизмом захвата, такой как один или более фиксированных или подвижных механических рук 110. Механические руки 110 могут быть жесткими или шарнирными с одним или более суставами 108, такими как шарниры и/или шаровые суставы. Механическая рука 110 может включать в себя клешневые захваты 112 или другие части, которые могут сопрягать и/или стабилизировать деталь 102. В других аспектах механизм 106 перемещения может включать в себя валики, подвижные рельсы, червячные передачи, колеса (в том числе зубчатые колеса, такие как шестерни, зубчатые валики и шарикоподшипники), или направляемые реактивные двигатели малой тяги (такие как малый реактивный двигатель или микроракетный двигатель). Привод для таких механизмов 106 перемещения может быть механическим, и/или электрическим (например, через мотор и факультативную коробку передач и/или кабели и шкивы; через зубчатую реечную передачу), и/или гидравлическим (например, через гидравлические рабочие жидкости и поршни, соединенные с подвижными участками). Механизм 106 перемещения может быть, например, механическим и/или химическим (как в ракете).
[0081] Устройство 100 послойного синтеза протяженных структур может послойно строить деталь 102 под собой. Однако, когда устройство 100 достигает степени традиционного "строительного пространства", заданного системой 202 скрепления материала, устройство 100 фактически "поднимается по" строящейся детали 100 и/или перемещает структуру за пределы традиционного "строительного пространства" устройства ESAMM. Таким образом, при желании устройство ESAMM может создавать дополнительный, цельный, последовательный участок детали 102, тем самым формируя деталь 102, которая в значительной степени больше, чем устройство.
[0082] По мере того, как напечатанная часть детали 102 становится больше и/или длиннее, устройство 100 может подниматься или совершать иное маневрирование вдоль детали 102 в необходимом темпе, чтобы система 202 скрепления материала оставалась на корректном расстоянии от детали 102. В некоторых аспектах компонент 204 скрепления материала соединяется или отсоединяется от механизма 106 перемещения. Отсоединение позволяет устройству 100 иметь переменные уровни корректировки, обеспечивая возможность большей точности для поверхности скрепления (например, поверхности печати), чем механизм 106 перемещения позволял бы в ином случае. Например, когда механизм 106 перемещения допускает большие шаги (1 мм, 1 см, 1 м и т.д. в зависимости от применения) по оси z, система 202 скрепления материала может включать в себя подачу 206, которая перемещает компонент 204 скрепления материала по данной оси z с более мелкими шагами (10, 20, 100 микронов и т.д. в зависимости от применения). Таким методом устройство 100 может создавать несколько слоев детали 102, не меняя позицию детали 102 через механизм перемещения.
[0083] В результате таким методом могут быть созданы очень сложные структуры, независимо от ограничений, наложенных длиной, многими более традиционными технологиями изготовления или гравитацией.
[0084] В аспекте изобретения механизм 106 перемещения может включать в себя механические руки 110, имеющие автоматизированные манипуляторы, такие как клешни 112. Механические руки 110 могут иметь до 6 степеней свободы с помощью электромеханических устройств, таких как сервоприводы, вдоль каждой механической руки 110. В других аспектах механические руки 110 могут иметь больше или меньше степеней свободы. Механические руки 110 используются для позиционирования механизмов захвата (клешни 112) для захвата созданной детали 102 и автоматического маневра относительно детали 102. Манипуляторы и механические руки 110 могут отличаться по размерам, количеству и позиции для достижения одинакового типа подъемного движения вдоль изготовленного элемента, а также структур, которые уже существуют, и на которых должно быть выполнено производство.
[0085] В других аспектах механическая рука 110 включает в себя держатель. Держатель может иметь нанесенное на него клеящее вещество, иметь поверхность с сильным трением, быть деформируемым, включать в себя электростатические прилипающие элементы, вакуумные или другие присасывающиеся элементы и т.п., чтобы прикрепляться к детали 102 желаемым методом.
[0086] В других аспектах механические руки 110 включают в себя устройства, которые обеспечивают возможность подниматься на деталь 102 подобно спортивному лазанью на Земле. Устройства включают в себя модули, которые прикрепляются к детали 102 с использованием фиксатора для захвата при маневрировании, создавая фиксаторы вдоль детали 102, чтобы использовать их вместо интеграции якорей после изготовления. Остроконечные инструменты и другие устройства бурения поверхности также могут использоваться, чтобы "вгрызаться" в поверхность для маневрирования.
[0087] В различных аспектах устройство 100 включает в себя или соединено с одним или более источниками исходного сырья. Исходным сырьем является любой материал или комбинация материалов, подходящие для производства детали. Исходным сырьем может являться пластмасса, металл, органический материал, неорганический материал или комбинация таких материалов. Как будет очевидно для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе, такие материалы, как акрилонитрилбутадиенстирол (ABS), поликарбонат (PC), полимолочная кислота (PLA), полиэтилен высокой плотности (HDPE), полифенилсульфон (PPSU), припойная проволока, полимерные матричные композиты, полиэфирэфиркетон (PEEK), висмут, алюминий, титан, олово, керамика, стекло, углеволокно и т.п., могут использоваться для производства желаемых деталей посредством послойного синтеза. В некоторых аспектах исходное сырье имеет подходящее состояние, форму, размер и/или другие физические характеристики, подходящие для использования посредством компонента скрепления материала. Исходное сырье может быть произведено из реголита астероидов, реголита других небесных тел, из космических обломков, из мусора, из устаревших деталей и т.п. В некоторых аспектах исходное сырье представляет собой полимерную нить, содержащую металлический порошок. В другом аспекте исходное сырье представляет собой полимер, содержащий углеродные нанотрубки, волокна и т.п. Еще в одном аспекте исходное сырье представляет собой смолу, смолу с наполнителем, связующим веществом и/или порошком и т.п. Исходное сырье может представлять собой жидкость или комбинацию материалов, имеющих разные физические состояния (например, твердое и жидкое).
[0088] В некоторых аспектах устройство 100 включает в себя электронику управления, установленную внутри рамы 104 или на раме 104. Электроника управления может управлять частями устройства 100 и/или принимать операционные команды из других источников через механизмы, очевидные для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе.
[0089] Хотя деталь 102, показанная на фиг. 1-3, представляет собой линейную балку, устройство 100 может быть использовано для производства деталей 102, имеющих нелинейные профили. Например, устройство 100 может произвести деталь 102 в форме диска любого желаемого размера (например, 10 метров, 100 метров, 1 или более километров). Устройство 100 может произвести сложные структуры, такие как решетка, камера высокого давления, модуль космического корабля и т.п.
[0090] В некоторых аспектах область печати может быть повернута относительно ранее созданных слоев детали 102. Это один метод создания изогнутого участка детали 102. Устройство 100 может быть ориентировано таким образом и по спирали внутрь при создании диска или другой круглой структуры. Как будет очевидно для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе, устройство может быть ориентировано другим образом или создавать части детали 102 другими методами, чтобы создать желаемую линейную или нелинейную структуру детали 102.
[0091] Теперь со ссылкой на фиг. 4А, 4B и 5 показаны различные виды устройства 100 послойного синтеза протяженных структур, содержащего механические руки 404 с зубчатой передачей, имеющие шарнирные колеса 408, удерживаемые на оси 406, в соответствии с различными аспектами настоящего раскрытия. Колесо 408. В других аспектах устройство 100 включает в себя дополнительные части механизма 106 перемещения, которые заставляют устройство перемещаться относительно детали 102. Устройство 100 может производить деталь 102, имеющую направляющую геометрическую форму 402, такую как столбцы зубцов, показанную на фиг. 4A-B. Направляющая геометрическая форма 402 представляет собой любую структуру, создаваемую устройством 100, которая сопрягается с механизмом 106 перемещения, чтобы помочь поддерживать позиционирование между деталью 102 и устройством 100. Направляющая геометрическая форма 402 может быть интегрирована в деталь 102 или добавлена к желаемой конструкции детали 102 перед производством детали. Направляющая геометрическая форма 402 может быть непрерывной, как показано на фиг. 4A-5, или созданной периодически. Например, утопленное кольцо может быть интегрировано в структуру поверхности детали 102 с определенными интервалами, обеспечивая место для того, чтобы механизм перемещения захватывал деталь 102 по мере ее производства. Направляющая геометрическая форма 402 может представлять собой один или более столбцов зубцов прямого зацепления (как показано на фиг. 4), зубцов червячного зацепления (как показано на фиг. 11), зубцов винтового зацепления и т.п. Направляющая геометрическая форма 402 может представлять собой последовательность углублений (как показано на фиг. 7) или последовательность выступов. Направляющая геометрическая форма 402 может включать в себя поверхность с шероховатостью или другие признаки, которые увеличивают силы трения между механизмом перемещения и деталью 102. Как будет очевидно для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе, направляющая геометрическая форма 402 может представлять собой любую регулярную или нерегулярную обработку поверхности, которая облегчает осуществление направления и позиционирования детали 102. В различных аспектах направляющая геометрическая форма 402 не создается.
[0092] Колесо 408 включает в зубчатую поверхность, позволяющую взаимодействовать с геометрической формой 402 поверхности плоской зубчатой передачи или геометрической формой 42 зубчатой рейки. В других аспектах колесо 408 имеет поверхность прямозубной зубчатой передачи или винтовой зубчатой передачи, позволяющую взаимодействовать с геометрической формой 408 поверхности, выполненной с возможностью создавать прямозубную зубчатую передачу или винтовую зубчатую передачу.
[0093] Механические руки 404 с зубчатой передачей могут быть или не быть расположены равномерно вокруг рамы 104. В некоторых аспектах механические руки 404 с зубчатой передачей могут иметь до 6 степеней свободы с помощью электромеханических устройств, таких как сервоприводы, вдоль каждой механической руки 404. В основе каждой механической руки 404 находится двигатель и колесо 408 прямозубной зубчатой передачи, которое зажимает деталь на геометрической форме 402 поверхности. Хотя вертикальным перемещением управляют прежде всего механическими руками 404, механизм корректировки гарантирует, что компонент 204 скрепления материала остается в пределах идеального диапазона. Электроника управления может находиться сверху устройства, но может быть перемещена куда-либо и/или размещаться в закрытой структуре, или также может быть не закрытой.
[0094] Механизм 106 перемещения, выполненный как механизм с зубчатым приводом с несколькими механическими руками, который может иметь две, три, четыре, пять, шесть или более механических рук, может обеспечить три главных преимущества. Во-первых, при помощи зубчатых передач и структурных конструкций, которые включают в себя зубцы или без зубцов, и с использованием другого решения гарантируется желаемая скорость подъема (1 к 1, 2 к 1, 3 к 1 и т.д.). Во-вторых, механические руки могут легко подтягиваться и выдвигаться, чтобы обеспечить возможность множества диаметров, даже в одной и той же структуре. Наконец, скорости подъема зубчатых передач могут регулироваться, чтобы создавать изогнутые структуры, позволяя создавать движение более чем по 1 оси.
[0095] Теперь с краткой ссылкой на фиг. 6 показано устройство 100 послойного синтеза протяженных структур, содержащее колеса 408 зубчатой передачи с полусферическими зубцами и производящее деталь 102, имеющую направляющую геометрическую форму 402, в соответствии с аспект настоящего раскрытия. Деталь 102 может быть произведена с внешними направляющими участками, вмещающими направляющую геометрическую форму 402. Такие внешние направляющие участки могут быть удалены с желаемой структуры 604 через поперечные элементы 602. После создания детали 102 внешние направляющие и поперечные элементы 602 могут быть удалены, оставляя желаемый участок 604 для использования.
[0096] Теперь со ссылкой на фиг. 7-8 показаны различные виды устройства 100 послойного синтеза протяженных структур, содержащего валики и производящего деталь, имеющую направляющую геометрическую форму.
[0097] В некоторых аспектах механизм 106 перемещения может включать в себя две или более механических рук 702 с валиком. Каждая механическая рука 702 с валиков включает в себя валик 704. В других аспектах механические руки 702 с валиком включают в себя вращающиеся шары или другие объекты, которые могут катиться по пути, содержащему углубления, или вдоль гладкой поверхности детали 102. Деталь 102 может включать в себя геометрическую форму 402 поверхности, которая создает последовательность углублений вдоль продольной оси детали 102. Механическими руками 702 с валиком может управлять привод 706, обеспечивая переменную силу и позволяя устройству 100 приспосабливаться к деталям 102 с переменными поперечными сечениями. Усилие механических рук 702 с валиком является переменным для подгонки к контурам любых размеров без скольжения. Валики 704 могут отличаться по размеру, количеству (один, два, три или более) и позиции для достижения одинакового типа подъемного движения вдоль изготовленной детали 102, и материалы, используемые для катящихся механизмов, могут отличаться по любым эксплуатационным целям (например, клейкие, с высоким трением, мягкие).
[0098] Теперь со ссылкой на фиг. 9-10 показаны различные виды устройства 100 послойного синтеза протяженных структур, содержащего механические руки 902 с гусеницами.
[0099] Механизм 106 перемещения может включать в себя механические руки 902 с гусеницами. Каждая механическая рука 902 с гусеницами может включать в себя две или более гусеничных цепи 904, которые состоят из сочлененных звеньев, позволяя гусеничным цепям 904 осуществлять контакт со сторонами детали 102. Гусеничные цепи 904 могут поворачиваться в зависимости от угла контакта с деталью 102. Как и устройства 102 на основе зубчатой передачи, устройства, включающие в себя механические руки 902 с гусеницами имеют способность изменять диаметры во время строительства, а также с одной детали 102 на следующую. В отличие от системы зубчатой передачи структура не обязательно должна быть специально разработана, чтобы соответствовать гусеничным цепям 904. При условии, что гусеничные цепи могут установить совмещенный контакт с внешней поверхностью детали 102, позиционирование может поддерживаться.
[00100] Теперь со ссылкой на фиг. 11A-B показаны виды устройства 100 послойного синтеза протяженных структур, содержащего червячные передачи 1102 и производящего деталь 102, имеющую направляющую геометрическую форму 402, в соответствии с аспектом настоящего раскрытия.
[00101] В аспекте изобретения устройство 100 может включать в себя две, три, четыре или более мобильных или немобильных механических руки 1102 с червячной передачей, каждая из которых включает в себя моторизованную червячную передачу. Эта передача будет ввинчиваться в зубцы направляющей геометрической формы детали 102 во время создания детали.
[00102] Теперь со ссылкой на фиг. 12 показан вид сбоку устройства 100 послойного синтеза протяженных структур, содержащего реактивные двигатели 1202 малой тяги, в соответствии с аспектом настоящего раскрытия.
[00103] В некоторых аспектах реактивные двигатели 1202 малой тяги, такие как двигатели с реактивной системой управления (RCS; РСУ) или аналогичные устройства, или модули реактивных двигателей малой тяги, могут быть интегрированы в устройство 100 вместо или в дополнение к другим частям механизма 106 перемещения. Такая конфигурация позволяет устройству 100 перемещаться вдоль создаваемой детали 102 без какого-либо прямого контакта.
[00104] Теперь со ссылкой на фиг. 13 показан вид сбоку устройства 100 послойного синтеза протяженных структур, содержащего реактивные двигатели 1202 малой тяги и захватывающие механические руки 110, в соответствии с аспектом настоящего раскрытия.
[00105] В различных аспектах механизм 106 перемещения включает в себя управляющие устройства точного перемещения и управляющие устройства грубого перемещения. Реактивный двигатель 1202 малой тяги может являться примером управляющего устройства грубого перемещения, способного перемещать устройство 100 на большие расстояния и не способного точно и быстро позиционировать устройство 100 на меньших расстояниях. Реактивный двигатель 1202 малой тяги также может перемещать устройство 100 из одной области в другую. Например, устройство 100 может изготавливать ферму длиной 100 метров, переместиться посредством реактивного двигателя 1202 малой тяги или подобного устройства подачи в середину фермы и начать создавать вторую ферму, соединенную с первой фермой и ортогональную по отношению к ней, тем самым формируя более сложную деталь 102. Устройства точного перемещения включают в себя механическую руку 110, механическую руку 702 с валиком, механическую руку 902 с гусеницами, механическую руку 404 с зубчатой передачей и т.п. Устройства точного перемещения захватывают или иным образом осуществляют контакт с деталью 102 и стабилизирует устройство 100 относительно детали 102. Посредством таких управляющих устройств точного перемещения устройство 100 может перемещаться "вверх" по детали 102 по мере ее создания. Некоторые управляющие устройства точного перемещения могут использоваться для перемещения или передвижения устройства 100 вдоль детали 102.
[00106] Теперь с краткой ссылкой на фиг. 14 показан вид сбоку устройства 100 послойного синтеза протяженных структур, содержащего реактивные двигатели 1202 малой тяги, захватывающие механические руки 110 и репрезентативный источник 1402 материала или исходного сырья, в соответствии с аспектом настоящего раскрытия. Источник 1402 материала вмещает и/или производят исходное сырье. В некоторых аспектах источник 1402 материала интегрирован в устройство 100. В других аспектах источник 1402 материала может быть отсоединен, заменен или пополнен. Еще в одних аспектах источник 1402 материала является другим устройством, транспортным средством или корпусом.
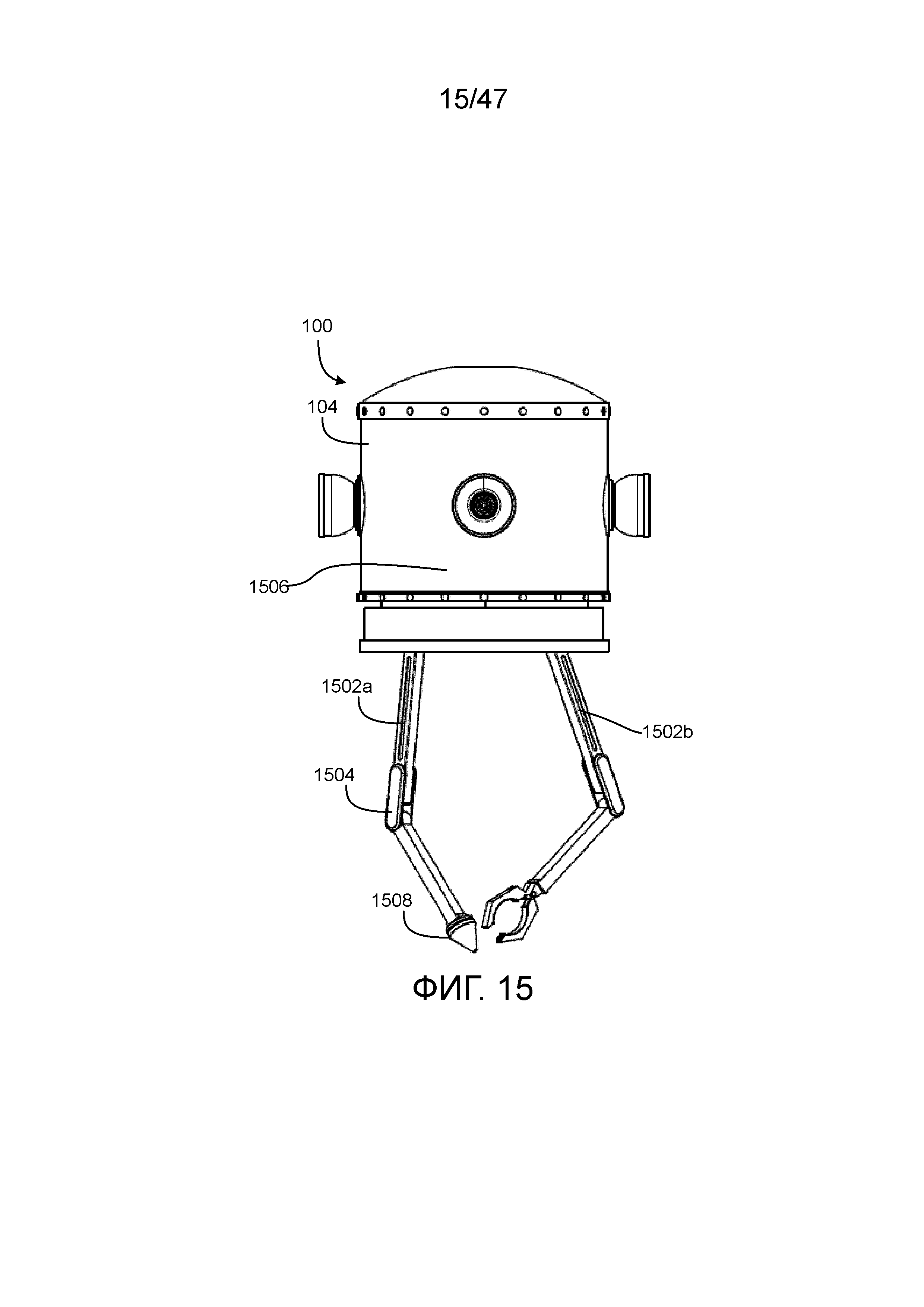
[00107] Теперь со ссылкой на фиг. 15 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, имеющего механические руки 1502 с элементами точного управления и элементами грубого управления, в соответствии с аспектом настоящего раскрытия.
[00108] В аспекте изобретения механизм 106 перемещения включает в себя одну или более комбинированных механических рук 1502. Каждая комбинированная механическая рука 1502 имеет двигатели 1504 точного позиционирования или другие механизмы или сборки, которые дают устройству 100 возможность малого перемещения (с размером шага 1 см или меньше). Каждая комбинированная механическая рука также включает в себя двигатели грубого позиционирования (расположены в раме 104 на фиг. 15) или другие механизмы или сборки, которые дают возможность большого перемещения (например, с размером шага 10 см или больше). Двигатель 1504 точного позиционирования представляет собой управляющее устройство точного перемещения. Двигатель грубого позиционирования представляет собой управляющее устройство грубого перемещения. Двигатель 1506 грубого позиционирования и/или другие управляющие устройства грубого перемещения могут представлять собой устройства с большим крутящим моментом, способные соединять объекты вместе или передавать значительное усилие на объект или объекты. Двигатель 1506 грубого позиционирования также может использоваться, чтобы толкать устройство 100 от поверхности, обеспечивая подачу.
[00109] В некоторых аспектах устройство 100 может включить в себя дополнительные устройства послойного синтеза или их части, установленные на механической руке 1502. Например, установленный на механической руке экструдер 1508 может быть помещен на оконечную часть механической руки 1502, тем самым позволяя создавать структуры или части структур с помощью экструдера 1508. В некоторых аспектах все устройство послойного синтеза может быть установлено на конце механической руки 1502, или в более общем случае часть механизма 106 перемещения. В других аспектах только участки для осаждения или скрепления устройства послойного синтеза установлены на конце механической руки 1502. В таких случаях участки для осаждения или скрепления функционально соединены с источником исходного сырья и другими частями, необходимыми для создания структур. Механические руки 1502 могут содержать каналы, проходы или другие структуры, которые соединяют экструдер 1508, печатающую головку и т.п. с источником исходного сырья, размещенным в устройстве 100 или соединенным с устройством 100. Как будет очевидно для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе, другие устройства для строительства, ремонта, технического контроля и/или наблюдения могут быть установлены на механических руках 1502.
[00110] Теперь со ссылкой на фиг. 16 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, имеющего несколько компонентов 204 скрепления материала, в соответствии с аспектом настоящего раскрытия. Устройство 100 может включать в себя несколько компонентов 204 скрепления материала. Такие компоненты 204 скрепления могут быть соединены с рамой 104, соединены с одной и той же или несколькими подачами 206, соединены с частями механизма 106 перемещения, соединенного для перемещения с механическими руками манипулятора, или иметь другие соединения, очевидные для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе. Каждый из компонентов 204 скрепления материала может скреплять разные типы материалов и/или скреплять материал с помощью разных механизмов (например, моделирование методом наплавления, сварка и т.п.). Устройство может включать в себя несколько устройств перемещения, в том числе реактивные двигатели 1202 малой тяги, механические руки 1502 (не показаны на фиг. 16) и т.п. Скрепление компонентов 204 может создавать структуры и их части с использованием одинаковых материалов или материалов разных типов.
[00111] Теперь со ссылкой на фиг. 17 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, имеющего дополнительные механические руки 1702, каждая механическая руку включает в себя дополнительный компонент 204 скрепления, в соответствии с аспектом настоящего раскрытия. Устройство 100 может включать в себя несколько компонентов 204 скрепления, выполненных для разных материалов, разрешений построения и т.п. Например, устройство 100 может включать в себя один компонент 204a скрепления, который производит детали с высоким разрешением с помощью выдавливания термопласта, и второй компонент 204b скрепления, который производит детали с низким разрешением через выдавливание. В некоторых аспектах механическая рука 1702 содержат всю или часть системы 206 позиционирования.
[00112] Теперь со ссылкой на фиг. 18 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, имеющего шарнирную механическую руку 1802, включающую в себя вспомогательное приспособление 1804, а именно, сканирующее устройство, в соответствии с аспектом настоящего раскрытия.
[00113] Устройство 100 может включать в себя одну или более механических рук 1802, имеющих вспомогательные приспособления 1804. Например, вспомогательное приспособление 1804 может представлять собой сканер (как показано на фиг. 18), камеру или другое устройство обнаружения. Вспомогательное приспособление 1804 также может представлять собой механическую руку манипулятора, клешню или другое устройство, как показано, например, на фиг. 15. Как будет очевидно для специалистов в релевантной области (областях) техники после прочтения описания в настоящем документе, вспомогательное приспособление 1804 может представлять собой любой механизмом, который облегчает создание детали 102, гарантирует качество детали 102, помогает при соединении детали 102 с другими объектами и т.п.
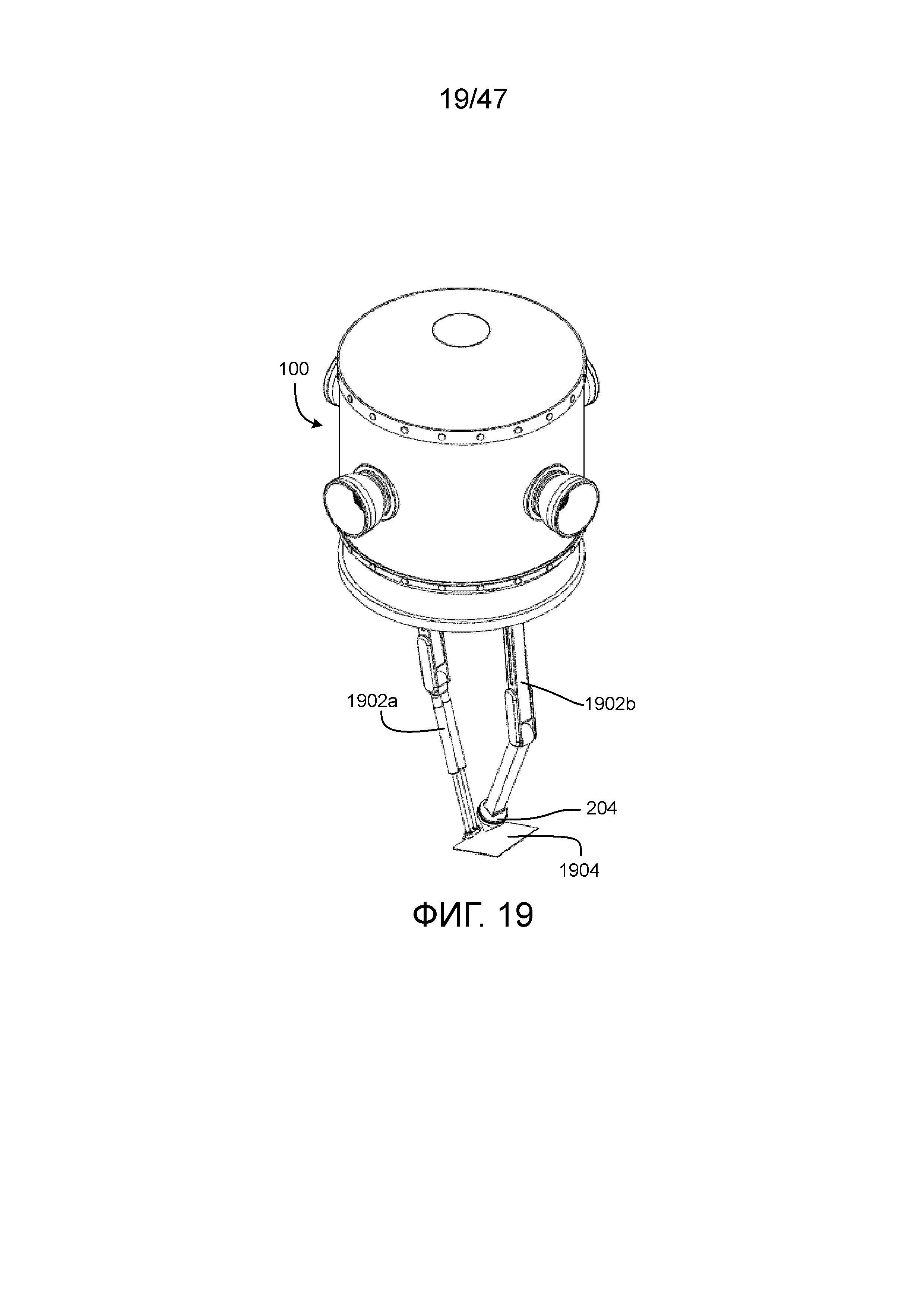
[00114] Теперь со ссылкой на фиг. 19 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, включающего в себя строительный лоток 1904, в соответствии с аспектом настоящего раскрытия. Вспомогательное приспособление 1804 может представлять собой строительный лоток 1904, обеспечивающий поверхность для создания деталей 102 и их частей.
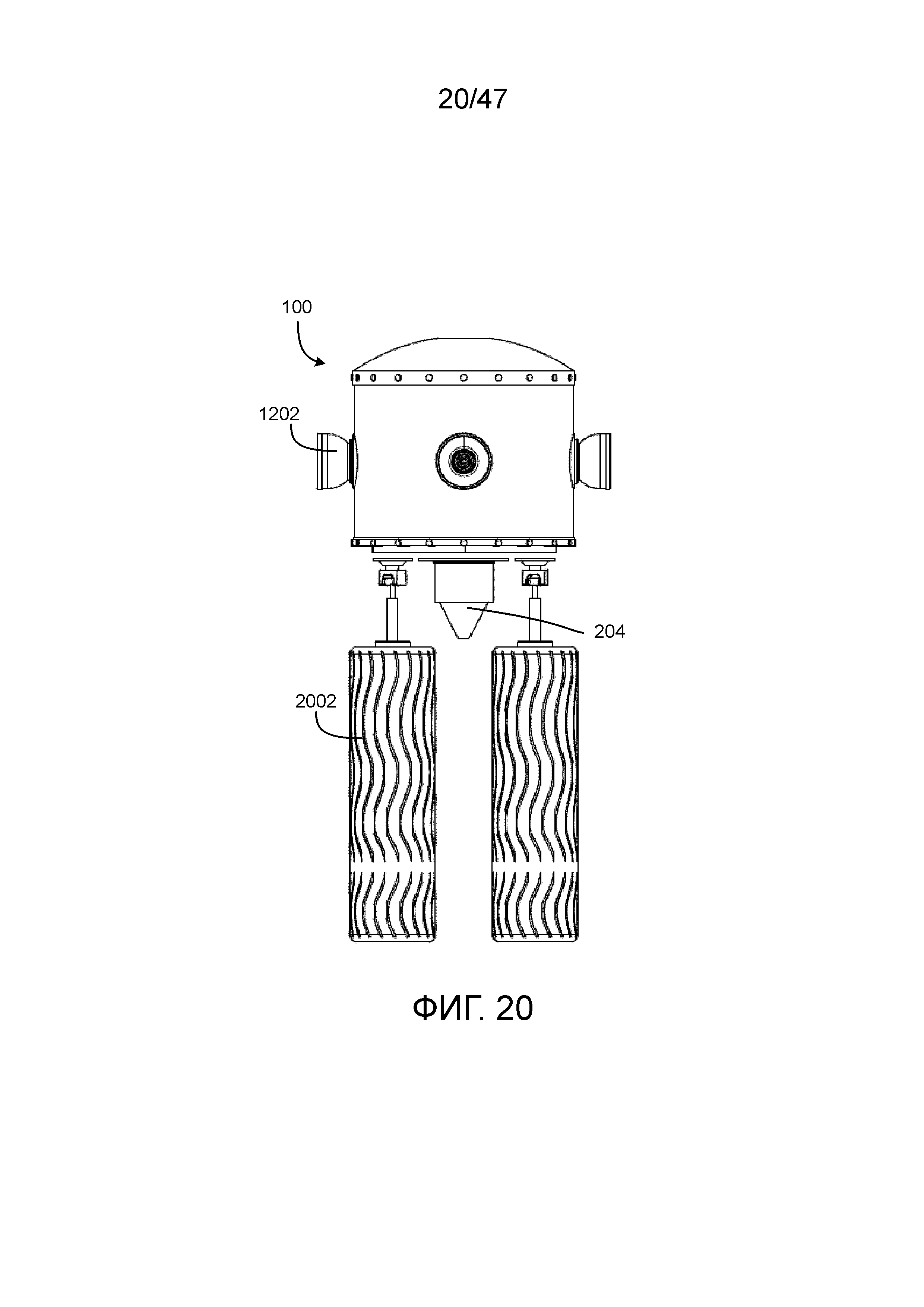
[00115] Теперь со ссылкой на фиг. 20 показан вид сбоку устройства 100 послойного синтеза протяженных структур, имеющего простирающиеся вертикально ориентированные валики 2002, в соответствии с аспектом настоящего раскрытия. Валик 2002 обеспечивает возможность движения устройства 100 через структуры, включающие в себя деталь 102, созданную компонентом 204 скрепления. Реактивные двигатели 1202 малой тяги могут быть использованы для перемещения устройства 100 из одной части детали 102 к другой или из одной области в другую.
[00116] Теперь со ссылкой на фиг. 21-23 показан вид в перспективе устройства 100 послойного синтеза протяженных структур, создающего нелинейные структуры 102, в соответствии с различными аспектами настоящего раскрытия.
[00117] Устройство 100 может создавать изогнутые структуры 102, такие как диск, как показано на фиг. 21, или большой цилиндр, показанный на фиг. 22. Различные части механизма 106 перемещения могут быть использованы, чтобы переориентировать устройство 100, позволяя создавать нелинейные структуры. Например, реактивные двигатели 1202 малой тяги и валики 2002 могут использоваться, чтобы переориентировать и направлять устройство 100 по мере создания структуры. Механизм 206 перемещения, который позиционирует компонент 204 скрепления, также может поместить компонент 204 скрепления таким образом, что может быть создана сложная структура.
[00118] Устройство 100 может создать первую часть структуры 102, такую как первая ферма 2302, затем быть переориентировано и создать дополнительные части структуры 102, такие как вторая ферма 2304, соединенная с первой фермой 2302 и простирающаяся от первой фермы 2302.
[00119] Теперь со ссылкой на фиг. 24 показана блок-схема последовательности этапов, демонстрирующая иллюстративный процесс 2400 для создания детали 102 с использованием устройства 100 послойного синтеза протяженных структур, в соответствии с аспектом настоящего раскрытия.
[00120] Процесс 2400 начинается на этапе 2402, и управление сразу переходит на этап 2404.
[00121] На этапе 2404 устройство 100 принимает все или часть инструкций печати для детали 102. В некоторых аспектах электроника управления добавляет направляющую геометрическую форму 402 или другие структуры к инструкциям детали, чтобы облегчить создание детали 102 устройством 100.
[00122] В различных аспектах устройство 100 содержит инструкции печати, и этап 2404 может быть опущен.
[00123] На этапе 2406 первая часть детали 102 принимается устройством 100. Первая часть может быть произведена другим устройством послойного синтеза или подана из другого источника (например, произведена другими способами). Первая часть служит в качестве основы для создания детали 102. Другая часть может быть принята и интегрирована в деталь 102 во время процесса создания детали. Например, могут периодически добавляться арматурные стержни.
[00124] В других аспектах первая часть была ранее создана устройством 100. Например, обеспечена первая ферма. Процесс 2400 используется для создания дополнительной структуры, соединенной с обеспеченной первой фермой.
[00125] На этапе 2408 первая часть детали 102 позиционируется в устройстве 100, чтобы облегчить создание детали 102.
[00126] В различных аспектах устройство 100 создает деталь 102, не используя первую часть, обеспеченную другим источником. Этапы 2406 и 2408 могут быть опущены.
[00127] На этапе 2410 устройство 100 создает часть детали 102, такую как один или несколько слоев. Когда система 202 скрепления материала включает в себя движение по оси z, могут быть произведены несколько слоев.
[00128] На этапе 2412, после того, как устройство 100 больше не может производить слои детали 102 в настоящей позиции относительно детали 102, определяется, завершена ли деталь 102. Если деталь 102 завершена, исполняется этап 2416, заканчивая процесс 2400. Если деталь 102 не завершена, механизм 106 перемещения изменяет позицию устройства 100 и/или детали 102, чтобы позволить создание дополнительных частей детали 102 устройством 100.
[00129] Таким образом, устройство 100 может создавать части детали 102 по мере того, как устройство 100 перемещается относительно объекта, или устройство 100 может создать часть, прекратить создание, переместить себя относительно детали 102 и возобновить создание части детали 102. Таким образом, устройство 100 может формировать очень длинные объекты, такие как балки, трубопроводы и т.п. по существу неограниченной длины.
[00130] Фиг. 25А является видом сбоку варианта осуществления устройства 100' послойного синтеза протяженных структур (ESAMM) для производства космического корабля в космосе, и фиг. 25B является видом снизу устройства 100' ESAMM. Устройство 100' ESAMM имеет корпус или раму 2504, которая выполнена с возможностью летать в космосе, изготавливая космический корабль (т.е., космический корабль 3800 на фиг. 38) с использованием методик послойного синтеза. Устройство 100' может включать в себя множество автоматизированных манипуляторов 2510 с рабочими органами 2512. Рабочие органы каждого манипулятора 2510 могут отличаться или меняться в зависимости от операции, которая должна быть выполнена на каждой из стадий производства и сборки космического корабля.
[00131] Корпус или рама 2504 могут включать в себя главную шину 2530 поддержки, имеющую системы управления для бортовой радиоэлектроники, автоматизированного управления манипулятором, управления электропитанием и других вычислительных функций. Устройство 100' может включать в себя одно или более вычислительных устройств (т.е., вычислительное устройство 4150 для выполнения одной или более функций, подробно описанных в настоящем документе).
[00132] Устройство 100' может включать в себя солнечные батареи 2505, интегрированные или соединенные с корпусом или рамой 2504, для электропитания устройства 100' с использованием солнечной энергии от солнца. Корпус или рама 2504 включают в себя поверхность 2504B, на которую выталкиваются произведенные детали через выходной порт 2519. Выходной порт 2519 может находиться в центре поверхности 2504B. Выходной порт 2519 может иметь ось, которая выровнена с осью центра корпуса 2504. Вокруг выходного порта 2519 может находиться по меньшей мере одна система 2535 технического контроля. Система 2535 технического контроля может включать в себя рентгеновское обнаружение, инфракрасную визуализацию и обнаружение, ультразвуковую визуализацию, визуализацию или обнаружение в видимом спектре или другие методики технического контроля для обнаружения размещения произведенной детали, присоединения другой детали, интеграции предварительно изготовленных компонентов, функций автоматизированного манипулятора, выполнения процесса строительства и т.п. Система 2535 технического контроля может включать в себя процессы, улучшенные с помощью машинного зрения, для изготовления и сборки деталей космического корабля. В некоторых вариантах осуществления система 2535 технического контроля может включать в себя множество линз, оптически соединенных с одной или более системами формирования изображений.
[00133] Показано, что корпус или рама 2504 имеют в целом восьмиугольную конфигурацию. Могут использоваться другие формы и конфигурации. Корпус 2504 может включать в себя отделения для хранения запасного оборудования для ремонта устройства 100' в космосе, заранее изготовленных компонентов для интеграции в строящийся космический корабль или систему космического корабля и т.п. Устройство 100' может включать в себя дополнительные рабочие органы для замены рабочих органов в зависимости от операции по изготовлению и сборке. Устройство 100' может включать в себя принтер 2550 ESAMM (внутри корпуса) для печати с использованием послойного синтеза компонентов, таких как трехмерные (3D) компоненты для создания структур, которые будут собраны в космосе, чтобы сформировать космический корабль. Выходом принтера 2550 является выходной порт 2519.
[00134] Фиг. 26 является частичным видом варианта осуществления устройства 100" послойного синтеза протяженных структур, производящим протяженную деталь 2602. Устройство 100" может включать в себя бортовую радиоэлектронику 2640, которая может включать в себя вычислительное устройство (т.е., вычислительное устройство 4150 на фиг. 41) для управления орбитой и полетом устройства 100" и/или функциональностью компонентов устройства 100". Бортовая радиоэлектроника 2640 может включать в себя работу и движение автоматизированных манипуляторов, как показано на фиг. 25. Устройство 100" может включать в себя экструдер 2608 и систему 2606 подачи (т.е., систему позиционирования). Устройство 100" может дополнительно включать в себя зону 2603 теплового контроля для управления средой вокруг процесса послойного синтеза в экстремальных условиях окружающей среды в космосе. Посредством неограничивающего примера деталь 2602 может быть сформирована во внутреннем пространстве 2617 устройства 100' и вытолкнута через выходной порт 2619 из устройства 100". Деталь 2602 может включать в себя сложную структуру, такую как решетка, ферма или другая удлиненная структура.
[00135] Фиг. 27A-27D иллюстрируют виды печатной структуры 2705, структура захвачена и прицеплена в позиции, и увеличенный вид позиции сцепления в соответствии с аспектами настоящего раскрытия. На фиг. 27А обеспечена предварительно изготовленная деталь 2705. Предварительно изготовленная деталь может быть напечатана устройством 100' или предварительно изготовлена посредством другой технологии изготовления. Предварительно изготовленная деталь 2705 должна быть размещена или прикреплена к другой детали или структуре 2703. Эта другая структура 2703 может являться печатной структурой. Деталь 2705 изолируется с помощью материала фольги. На фиг. 27B деталь захватывается рабочим органом 2710. Деталь присоединяется через рабочий орган 2710, который может захватывать деталь, перемещать деталь и удерживать деталь. Деталь 2705 прицепляется в позиции на фиг. 27C, причем показана противоположная сторона 2707 детали. Крепеж 2709 показан на фиг. 27D. Крепеж 2709 может быть изготовлен устройством 100' перед установкой, показанной на фиг. 27D. Структура соединения может быть изготовлена посредством устройства ESAMM, обеспечивающим структуру и размещение для установки предварительно изготовленных деталей 2705, таких как солнечные батареи. Изготовленная структура соединения включает в себя функциональность соединения, которая выполнена с возможностью принимать застежку 2709. Функциональность соединения может быть выполнена с возможностью обратимо соединяться с крепежом 2709.
[00136] Фиг. 28A-28E являются видами в перспективе вариантов осуществления состыкованных соединяемых печатных структур. На фиг. 28А рабочий орган 2812 является клешней или захватом. Показано, что рабочий орган 2812 зажимает первую деталь 2802A. На фиг. 28B первая деталь 2802A удаляется и перемещается. На фиг. 28C первая деталь 2802A перемещается ко второй детали 2802B с помощью автоматизированного манипулятора с рабочим органом 2812. На фиг. 28D первая деталь 2802A и вторая деталь 2802B стыкуются или соединяются вместе с помощью автоматизированного манипулятора. На фиг. 28E первая деталь 2802A высвобождается автоматизированным манипулятором после того, как первая деталь 2802A соединена или сцеплена со второй деталью 2802B.
[00137] Фиг. 29А является блок-схемой комплекта 2900А космического корабля в соответствии с аспектом настоящего раскрытия. Комплект 2900А космического корабля может включать в себя по меньшей мере один электронный узел EA1, EA2, …, EAY и по меньшей мере один материал SM1, SM2, …, SMX космического корабля для производства составных деталей в космосе с использованием методики послойного синтеза. Комплект 2900А космического корабля может включать в себя по меньшей мере один комплектующий компонент CA1, CA2, … CAZ. Множество электронных узлов EA1, EA2, …, EAY может включать в себя по меньшей мере одно вычислительное устройство (т.е., вычислительное устройство 4150 на фиг. 41). Следует понимать, что в практическом применении комплект 2900А космического корабля может включать в себя много других компонентов и функций, которые не были явно проиллюстрированы на фиг. 29А, и которые не включены в настоящий документ ради краткости.
[00138] Вычислительное устройство (т.е., вычислительное устройство 4150 на фиг. 39) может быть предварительно запрограммировано с помощью программ или программного обеспечения, чтобы управлять различными операциями работающего космического корабля. В варианте осуществления вычислительное устройство запрограммировано до страт с земли или дистанционно с земли. По меньшей мере один из электронных узлов EA1, EA2, …, EAY может включать в себя по меньшей мере один электронный узел для управления орбитой космического корабля и стабилизации космического корабля в космосе во время полета. По меньшей мере один из электронных узлов EA1, EA2, …, EAY может включать в себя модули управления электропитанием.
[00139] По меньшей мере один электронный узел EA1, EA2, …, EAY может включать в себя электронные узлы для выполнения визуализации наблюдения. Посредством неограничивающего примера по меньшей мере один электронный узел EA1, EA2, …, EAY может включать в себя систему массива датчиков изображения.
[00140] По меньшей мере один электронный узел EA1, EA2, …, EAY может включать в себя по меньшей мере одну систему связи (т.е., систему связи 3320 на фиг. 33) для передачи и/или приема связи. В варианте осуществления система связи может включать в себя системы для ретрансляции от одного спутника к другого. Связь может включить в себя видеосвязь, спутниковую/сотовую связь, передачу координат системы глобального позиционирования, передачу данных и т.д.
[00141] По меньшей мере один электронный узел EA1, EA2, …, EAY может включать в себя один или более модулей погодных датчиков для обнаружения и сообщения о погодных условиях.
[00142] Комплект 2900А космического корабля может включать в себя материалы (т.е., материал SM1, SM2, …, SMX космического корабля) для создания в космосе по меньшей мере одной антенна 3340 с использованием послойного синтеза для использования в связи. Сформированная антенна 3340 электрически присоединяется по меньшей мере к одному электронному узлу (т.е., к системе 3320 связи). Посредством неограничивающего примера по меньшей мере одна антенна 3340 может включать в себя параболическую антенну, как показано на фиг. 33. Однако параболические антенны могут иметь параболический отражатель различных форм и не ограничены конфигурацией с круглым диском. Антенна 3340 может быть построена из металла для формирования металлической антенны или из других материалов для антенны, сконфигурированной для установки и работы в космосе. Антенна может представлять собой параболическую антенну с металлической пластиной или параболическую антенну с металлической решеткой.
[00143] По меньшей мере один комплектующий компонент CA1, CA2, …, CAZ может включать в себя солнечные батареи (т.е., солнечные батареи 3115 на фиг. 31), аккумуляторные устройства или аккумуляторные батареи и другие компоненты, необходимые для сборки и/или работы космического корабля (т.е., космического корабля 3800 на фиг. 38). В варианте осуществления структуры (т.е., структура 3123 на фиг. 31) могут быть сделаны с использованием послойного синтеза для создания консолей спутника. Солнечные батареи соединены с консолями спутника и электрически соединены с аккумуляторными устройствами для обеспечения электроэнергией космического корабля в космосе. Комплект 2900А может включать в себя устройство 100' ESAMM. В некоторых случаях комплект 2900А может опустить устройство 100' ESAMM. Устройство 100' ESAMM 100' может быть заменено устройством 100 или другие вариациями, описанными в настоящем документе.
[00144] Фиг. 29B является блок-схемой последовательности этапов, показывающей вариант осуществления процесса 2900B для производства космического корабля или спутника в космосе. На этапе 2902 процесса 2900B осуществляется запуск упакованного полезного груза с комплектом 2900А космического корабля. На этапе 2904 осуществляется развертывание устройства 100' ESAMM. На этапе 2906 устройство 100' ESAMM. На этапе 2908 устройство 100' ESAMM может собрать по меньшей мере одну полученную в результате систему, по меньшей мере одна полученная в результате система может включать в себя изготовленную деталь, собранную с помощью по меньшей мере одного из комплектующего компонента и электронного узла. Когда изготовленная деталь собрана, изготовленная деталь может быть присоединена механически, электрически или с использованием комбинации механического и электрического присоединений. На этапе 2910 устройство 100' ESAMM осуществляет технический контроль полученной в результате системы. Этап 2910 может вернуться на этап 2906 для следующей структуры, которая должна быть сделана, в результате чего этапы 2906, 2908 и 2910 повторяются для каждой полученной в результате системы, которая должна быть изготовлена и/или собрана в космосе, чтобы завершить космический корабль. В некоторых случаях комплектующие интегрируются в изготовленные детали или собранную систему. В некоторых случаях детали, комплектующие и электронные узлы соединяются вместе или интегрируются в соответствии с проектной схемой или планом. На этапе 2912 после изготовления и сборки компонентов, структур и полученных в результате систем космический корабль вводится в эксплуатацию в космосе.
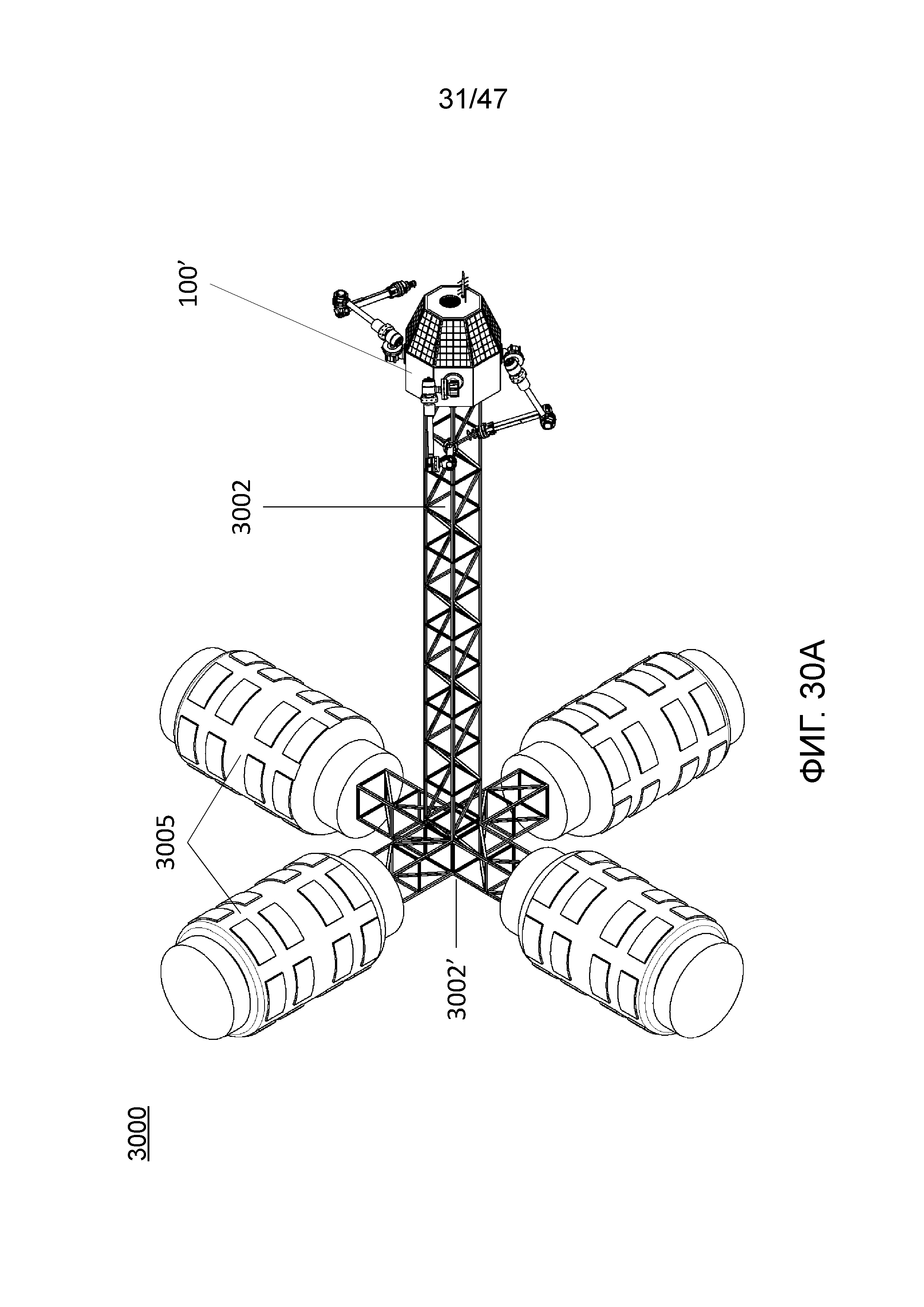
[00145] Фиг. 30А являются видом в перспективе варианта осуществления собираемого космического корабля 3000, и фиг. 30B является видом сбоку. Устройство 100' ESAMM может построить протяженную структуру 3002', которая имеет конфигурацию решетки или фермы, и вторую протяженную структуру 3002, которая простирается далеко от центра космического корабля 3000. Решетчатая или ферменная конфигурация имеет четыре консоли, имеющих центральный узел. Каждая консоль имеет присоединенный к ней корпус 3005 космического корабля. Корпус 3005 космического корабля представлять собой деталь комплекта, таким образом, корпус 3005 предварительно изготовлен на земле. В дополнительном варианте осуществления корпус 3005 космического корабля может быть изготовлен в космосе с использованием послойного синтеза. Еще в одном варианте осуществления корпусы 3005 космического корабля представляют собой космический корабль с измененным назначением, запущенный третьей стороной.
[00146] Фиг. 31 является видом варианта осуществления устройства 100' послойного синтеза протяженных структур, осуществляющего сборку деталей для космического корабля в космосе. Космическому кораблю (т.е., космическому кораблю 3800) могут быть нужны солнечные батареи 3115 для обеспечения электроэнергией космического корабля. Может потребоваться, чтобы солнечные батареи 3115 были присоединены к структуре 3123 космического корабля, например, но без ограничения, с помощью консолей космического корабля. Здесь устройство 100' показано с первым рабочим органом 3112А на конце автоматизированного манипулятора 3110 А для удержания фермы структуры 3123. Рабочий орган 3112B находится на другом автоматизированном манипуляторе 3110B. Устройство 100' удерживает солнечную батарею 3115 и устанавливает ее на структуру 3123.
[00147] Устройство 100' также может соединить солнечную батарею 3115 с аккумуляторными устройствами или аккумуляторными батареями и другими компонентами, необходимыми для сборки и/или работы космического корабля (т.е., космического корабля 3800 на фиг. 38).
[00148] Устройство 100' также может включать в себя систему 3180 связи, соединенную с корпусом или рамой устройства 100'. Система связи 3180 может позволить дистанционно управлять устройством 100' для изменения одного или более процессов или операций по изготовлению. Система 3180 связи может позволить перепрограммировать и/или переконфигурировать устройство 100' для длительного использования в космосе. Устройство 100' может быть запрограммировано с помощью другой проектной схемы для другого космического корабля.
[00149] Посредством неограничивающего примера антенна системы 3180 связи может быть изготовлена в космосе.
[00150] Фиг. 32 является другим видом варианта осуществления устройства 100' послойного синтеза протяженных структур, осуществляющего сборку/изготовление деталей для космического корабля в космосе. Показано, что устройство 100' удерживает протяженную структурную деталь 3202, которая имеет в целом цилиндрическую конфигурацию структуры. Показано, что один конец структурной детали 3202 соединен с автоматизированным манипулятором. Другой конец структурной детали 3202 присоединен к электронному узлу и/или комплектующему компоненту для космического корабля. В качестве неограничивающего примера солнечные батареи 3215 могут быть присоединены к блоку 3230 управления электропитанием, и когда полученная в результате система присоединена к нему механически, электрически или с использованием комбинации механического и электрического присоединений, она служит для управления электропитанием космического корабля.
[00151] Множество автоматизированных манипуляторов позволяет устройству 100' обрабатывать несколько структур и компонентов одновременно, чтобы полученная в результате система могла быть сконфигурирована и сформирована.
[00152] Фиг. 33 является еще одним видом варианта осуществления устройства 100' послойного синтеза протяженных структур, осуществляющего сборку/изготовление деталей для космического корабля в космосе. По меньшей мере один электронный узел EA1, EA2, …, EAY (фиг. 29) может включать в себя по меньшей мере одну систему связи (т.е., систему 3320 связи) для передачи и/или приема сигналов связи. В варианте осуществления показано, что система 3320 связи поддерживается и переносится одним из автоматизированных манипуляторов 3310. Устройство 100' также может включать в себя систему 3380 связи. Показано, что устройство 100' удерживает антенну 3340 с использованием другого автоматизированного манипулятора 3310. Антенна 3340 может быть изготовлена в космосе с использованием послойного синтеза. Сформированная антенна 3340 электрически присоединяется по меньшей мере к одному электронному узлу (т.е., к системе 3320 связи). Другой автоматизированный манипулятор 3310 может использоваться для электрического соединения системы 3320 связи и антенны 3340 вместе.
[00153] Фиг. 34А является видом в перспективе варианта осуществления детали 3402, изготовленной в космосе, и фиг. 34B является видом сбоку детали 3402, изготовленной в космосе. Показан другой вариант осуществления устройства 100''. Показано, что деталь 3402 удерживается системой позиционирования 3406 компонента скрепления материала, связанной с экструдером 3408. Система 3406 позиционирования компонента скрепления материала и экструдер 3408 могут поддерживаться рамой 3404А.
[00154] Экструдер 3408 является деталью принтера другого производственного устройства 2550. Материал может быть в виде картриджа, который может быть заменен или снова наполнен. Картриджи могут автоматически вставляться посредством прямого размещения или сближения и стыковки, например, выполняемого через общие механизмы причаливания, и исходное сырье подается через общий соединитель. В качестве неограничивающего примера производственное устройство 2550 можно заменено на другое производственное устройство, специфическое для другого типа материала или другого экструдера. В другом неограничивающем примере устройство 100'' может функционировать как автономный космический аппарат, но для некоторых строительных нужд другой космический корабль может состыковаться с устройством 100'', и материал может подаваться через механизм причаливания непосредственно производственному устройству 2550, или картридж может быть заменен или снова наполнен.
[00155] Фиг. 34C является другим вариантом осуществления детали 3402, изготовленной в космосе, с видом в перспективе, и фиг. 34D является видом сбоку. Показано, что деталь 3402 удерживается системой 3406 позиционирования компонента скрепления материала, связанной с экструдером 3408. Система 3406 позиционирования компонента скрепления материала содержит захваты 3411. На фиг. 34А и 34B показаны только два захвата 3411 в качестве части системы 3406 позиционирования компонента скрепления материала. На фиг. 34C и 34D показан третий захват 3411. Третий захват 3411 обеспечен для дополнительной стабилизации. Хотя показаны три захвата, также могут использоваться дополнительные захваты. Таким образом, захваты могут зажать или удерживать структуру 3402, в то время как другие механические руки используются для "подъема". Захваты 3411 также могут использоваться в качестве дополнительной структурной опоры, когда строительство структуры завершено.
[00156] Захваты 3411 также могут быть нагреты или охлаждены, чтобы функционировать либо как элемент отвода тепла, либо как элементы отвода холода. Таким образом, радиатор может быть термически присоединен по меньшей мере к одному захвату. Захваты также могут использоваться для рассеяния электрических зарядов, которые могут накапливаться в структуре или на захватах. Вследствие природы производственной среды температура может являться фактором в производстве детали 3402, как определено используемым материалом и окружающей средой, в которой происходит строительство. В качестве неограничивающего примера, если строящаяся деталь сделана из металла в космосе, металл является хорошим проводником тепла. Захваты 3411, ближайшие к экструдеру 3408, могут быть нагреты, чтобы гарантировать, что ближайший к экструдеру металл находится при подходящей температуре, тогда как более удаленные захваты могут находиться при более низкой температуре, чтобы минимизировать нагревание, производящее градиент в детали. Что касается электричества, если деталь пластмассовая, то со временем накапливается электрический потенциал, в котором накапливается облако статического электричества. По меньшей мере один захват 3411 может обеспечить электрический путь для рассеяния этих электрических зарядов. Таким образом, захваты могут использоваться для изолирования электрических компонентов, например, тех на устройстве 100' или космическом корабле, к которым присоединена деталь 3402. Посредством использования в качестве элементов отвода тепла или холода захваты также могут использоваться для предотвращения того, чтобы деталь 3402 срезалась или раскололась либо во время изготовления, либо после изготовления вследствие процесса изготовления.
[00157] Фиг. 35 является еще одним видом варианта осуществления устройства 100''' послойного синтеза протяженных структур, осуществляющего сборку/изготовление деталей для космического корабля в космосе. Устройство 100''' подобно устройству ESAMM, показанному без автоматизированных манипуляторов. Однако автоматизированные манипуляторы или захваты 3411 снабжены устройством 100'''. Захваты 3411 являются деталью механизма перемещения по оси z, или системы 3506 z-перемещения. Экструдер 3508 находится в устройстве 100'''. Также показана бортовая радиоэлектроника 2560 на устройстве 100''', материал 3523 исходного сырья и механизм 3527 демпфирования перемещения. Также показаны система 3531 аккумуляторов или фотоэлектрические устройства 3537. На фиг. 35 деталь 3602A показана с корпусом 3655А космического корабля на дальнем конце от детали и устройства 100''', которое могло был изготовлено в соответствии с описанными в настоящем документе процессами для послойного синтеза. Хотя не показано, космический корабль 3500 может иметь установленную систему связи с антенной 3540. Хотя не показано, космический корабль 3500 может включать в себя солнечные батареи 3515, присоединенные к консолям 3527 солнечной батареи.
[00158] Как показано далее, захваты 3511 защищены корпусом устройства 100'''. Это может быть полезно, когда захваты используются в качестве элемента отвода тепла и/или элемента отвода холода, как раскрыто в настоящем документе.
[00159] Когда космический корабль 3500 выпущен и готов к эксплуатации, устройство 100''' может быть высвобождено или отделено от космического корабля 3500. В варианте осуществления устройство 100''' может включать в себя функциональные элементы (например, рупорные излучатели, датчики, солнечные батареи), которые работают с компонентами на других частях космического корабля 3500, создавая функционирующий блок.
[00160] Фиг. 36 является еще одним видом варианта осуществления устройства послойного синтеза протяженных структур, осуществляющего сборку/изготовление деталей для космического корабля в космосе. Устройство 100' показано с полностью собранным/изготовленным корпусом 3723 космического корабля. Однако комплектующие компоненты, такие как солнечные батареи 3715, не установлены. На иллюстрации корпус 3723 космического корабля показан прикрепленным к изготовленной в космосе протяженной детали 3702. Протяженная деталь 3702 вытеснена на длину, которая позволяет по меньшей мере одному автоматизированному манипулятору 3710 (манипулятору, удерживающему солнечные батареи 3715) достигнуть точек соединения на корпусе 3723 космического корабля, чтобы установить солнечные батареи с консолями. В варианте осуществления устройство 100' может включать в себя по меньшей мере один автоматизированный манипулятор 3710 для удержания солнечных батарей и по меньшей мере один автоматизированный манипулятор 3710 для выполнения сложных механических и/или электрических соединений солнечных батарей к консолям или корпусу космического корабля.
[00161] В варианте осуществления может иметься четыре автоматизированных манипулятора 3710, два для удержания солнечных батарей, и два для выполнения действий по установке. В других вариантах осуществления может иметься три автоматизированных манипулятора 3710, два для удержания солнечных батарей, и один для выполнения действий по установке. В некоторых вариантах осуществления деталь 3702, присоединенная к устройству 100', может быть повернута или перемещена относительно устройства 100', чтобы сориентировать структуры (т.е., корпус 3723 космического корабля), прикрепленные к детали вблизи с автоматизированным манипулятором, для выполнения сложных действий по установке, таких как механическое крепление или электрические соединения.
[00162] В некоторых вариантах осуществления может иметься два автоматизированных манипулятора, один используется для удержания, и другой для выполнения сложных действий по установке, таких как механическое крепление или электрические соединения.
[00163] В некоторых вариантах осуществления может иметься по меньшей мере один главный автоматизированный манипулятор, который может установить дополнительные автоматизированные манипуляторы в космосе для одной или более производственных задач. В качестве альтернативы рабочие органы на конце автоматизированного манипулятора могут быть заменены в космосе на рабочие органы различных типов.
[00164] Фиг. 37 является вариантом осуществления устройства послойного синтеза протяженных структур, осуществляющего сборку/изготовление космического корабля 3800 в космосе. Иллюстрация на фиг. 37 может представлять собой продолжение этапов для производства космического корабля или спутников в космосе, показанных на фиг. 36. Космический корабль 3800 включает в себя корпус 3823 космического корабля для поддержки в нем различных электронных узлов (не показаны) для работы и полета космического корабля 3800, такого как, но без ограничения, спутник. Спутники могут иметь различные формы и геометрические конфигурации. В варианте осуществления корпус 3823 космического корабля может иметь форму многоугольника, например, шестиугольную форму.
[00165] Космическому кораблю 3800, cконфигурированному как спутник, требуются системы для управления электропитанием космического корабля. Следовательно, космический корабль 3800 может включать в себя консоли 3813, к которым прикреплены солнечные батареи 3815. Консоли 3813 могут быть выполнены с возможностью перемещаться или вращаться, чтобы осуществлять управление орбитой и полетом корпуса космического корабля и/или захват солнечной энергии от солнца во время полета.
[00166] Собранный космический корабль 3800 дополнительно включает в себя антенну 3840, присоединенную к корпусу 3823 космического корабля. Однако антенна 3840 электрически присоединена к системе связи (т.е., к системе 3320 связи). Когда космический корабль 3800 полностью собран в космосе, космический корабль 3800 может быть высвобожден из устройства 100' и помещен на орбиту. Устройство 100' выполнено с возможностью поддерживать космический корабль 3800 и двигаться с ним по орбите в космосе, пока космический корабль 3800 не будет высвобожден. Протяженная деталь 3802 служит для отдаления собранного космического корабля 3800 от устройства 100' таким образом, чтобы после высвобождения космического корабля 3800 не были затронуты работа и полет устройства 100'.
[00167] По сравнению с длиной протяженной детали 3702 длина протяженной детали 3802 растет или растягивается далее. Таким образом, протяженная деталь 3802 увеличивается в реальном времени, чтобы отдалить космический корабль 3800 от устройства 100', в результате чего, когда космический корабль 3800 высвобождается, устройство и космический корабль не сталкиваются.
[00168] Устройство 100' может быть выполнено с возможностью растягивать или наращивать длину протяженной детали 3802 в реальном времени для разных стадий процесса изготовления, выполняемого в космосе, в том числе для запуска, полностью собранного и готового к эксплуатации космического корабля для функционирования независимо от устройства 100'.
[00169] Фиг. 38A-38C являются внутренним видом варианта осуществления устройства 3900 послойного синтеза протяженных структур. Устройство 3900 может включать в себя один или более автоматизированных манипуляторов 3910 для формирования автоматизированной механической руки с шарнирными суставами. Манипулятор 3910 включает в себя опорное основание 3909 для установки одного конца манипулятора 3910 на структуре или корпусе. Другой конец манипулятора 3910 может иметь прикрепленный к нему рабочий орган 3912, такой как захват, или другие приложения.
[00170] Устройство 3900 включает в себя обратимую область RAA сборки. Устройство 100, 100', 100'' или 100''' имеет внешнюю область сборки. Устройство 3900 может включать в себя обратимую область RAA сборки, которая является внутренней по отношению к телу, но находится в космосе. Обратимая область RAA сборки включает в себя камеры или устройства обработки изображений по меньшей мере одной системы 3935 технического контроля. Устройство 3900 включает в себя систему 3940 бортовой радиоэлектроники в отсеке бортовой радиоэлектроники. Устройство 3900 включает в себя строительную область BA и по меньшей мере одну область AA сборки.
[00171] Устройство 3900 может включать в себя экструдер 3908 и строительные поверхности вблизи одного или более автоматизированных манипуляторов 3910. Устройство 3900 может быть выполнено с возможностью для послойного синтеза с использованием одного или более материалов для строительства космического корабля или других компонентов.
[00172] Теперь со ссылкой на фиг. 39 в базовой конфигурации вычислительное устройство 4050 может включать в себя стационарное вычислительное устройство или мобильное вычислительное устройство любой тип. Вычислительное устройство 4050 может включать в себя один или более процессоров 4052 и системную память в накопителе 4054 на жестком диске. В зависимости от точной конфигурации и типа вычислительного устройства системная память может быть энергозависимой (такой как оперативное запоминающее устройство (ОЗУ; RAM) 4056), энергонезависимой (такой как постоянное запоминающее устройство (ПЗУ; ROM) 4058, флэш-память 4060 и т.п.) или являться некоторой комбинацией из этих двух. Системная память может хранить операционную систему 4064, одно или более приложений и может включать в себя данные программы для выполнения полета, навигации, бортовой радиоэлектроники, операций управления электропитанием, например, для операций для полета в космосе.
[00173] Вычислительное устройство 4050 может выполнить один или более этапов процесса 2900B и/или процессов послойного синтеза, описанных в настоящем документе. Вычислительное устройство 4050 также может иметь дополнительные признаки или функциональность. Например, вычислительное устройство 4050 может также включать в себя дополнительные устройства хранения данных (сменные и/или не сменные), такой как, например, магнитные диски, оптические диски или лента. Компьютерные запоминающие носители могут включать в себя энергозависимые и энергонезависимые, неизменяемые, сменные и не сменные носители, реализованные любым способом или технологией для запоминающего устройства данных, таких как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Системная память, сменное запоминающее устройство и не сменное запоминающее устройство все являются примерами компьютерных запоминающих носителей. Компьютерные запоминающие носители включают в себя, но без ограничения, оперативное запоминающее устройство (ОЗУ; RAM), постоянное запоминающее устройство (ПЗУ; ROM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ; EEPROM), флэш-память или другую технологию памяти, память на компакт-диске, предназначенном только для чтения (CD-ROM), цифровые универсальные диски (DVD) или другое оптическое запоминающее устройство, магнитные кассеты, магнитную ленту, запоминающее устройство на магнитном диске или другие магнитные запоминающие устройства, или любой другой физический носитель, который может использоваться для хранения желаемых данных, и к которому может осуществить доступ вычислительное устройство. Любые такие компьютерные запоминающие носители могут являться частью устройства.
[00174] Вычислительное устройство 4050 также может включать в себя или иметь интерфейсы для устройства (устройств) ввода (не показаны), такие как клавиатура, мышь, перо, устройство голосового ввода, устройство сенсорного ввода и т.д. Вычислительное устройство 4050 может включить в себя или иметь интерфейсы для соединения с устройством (устройствами) вывода, таким как дисплей 4062, динамики и т.д. Вычислительное устройство 4050 может включать в себя периферийную шину 4066 для соединения с периферийными устройствами. Вычислительное устройство 4050 может содержать соединение (соединения) связи, которые позволяют устройству осуществлять связь с другими вычислительными устройствами, например, по сети или беспроводной сети. В качестве примера, но без ограничения, соединение (соединения) связи может включить в себя проводные носители, такие как проводная сеть или прямое проводное соединение, и беспроводные носители, такие как акустические, радиочастотные (RF), инфракрасные и другие беспроводные носители. Вычислительное устройство 4050 может включить в себя сетевую карту 4068 для соединения (проводного или беспроводного) с сетью.
[00175] Компьютерный программный код для выполнения описанных выше операций может быть написан на множестве языков программирования, в том числе, но без ограничения, на языке программирования высокого уровня, таком как C или C++, для удобства разработки. Кроме того, компьютерный программный код для выполнения операций вариантов осуществления, описанных в настоящем документе, также может быть написан на других языках программирования, таких как, но без ограничения, интерпретируемые языки. Некоторые модули или подпрограммы могут быть написаны на ассемблере или даже на микрокоде для улучшения производительности и/или использование памяти. Также будет очевидно, что функциональность любых из программных модулей также может быть реализована с использованием дискретных аппаратных компонентов, одной или более специализированных интегральных схем (ASIC), или запрограммированного процессора цифровой обработки сигналов (DSP) или микроконтроллера. Код, в котором описана программа вариантов осуществления, может быть включен в качестве программно-аппаратного обеспечения в оперативное запоминающее устройство (ОЗУ; RAM), постоянное запоминающее устройство (ПЗУ; ROM) и флэш-память. В ином случае код может быть сохранен на материальном машиночитаемом запоминающем носителе, таком как магнитная лента, гибкий диск, жесткий диск, компакт-диск, фотомагнитный диск, цифровой универсальный диск (DVD).
[00176] Варианты осуществления могут быть выполнены с возможностью использования в компьютере или устройстве обработки данных, которое включает в себя память, таком как центральный процессор (CPU), оперативное запоминающее устройство (ОЗУ; RAM) и постоянное запоминающее устройство (ПЗУ; ROM), а также запоминающий носитель, такой как жесткий диск.
[00177] ʺПошаговый процессʺ для выполнения требуемых функций в настоящем документе представляет собой заданный алгоритм и может быть показан как математическая формула, в текстовом описании и/или в блок-схеме последовательности этапов. Инструкции программы создают машину специального назначения для выполнения конкретного алгоритма. Таким образом, в любом пункте формулы изобретения "средство плюс функция" в настоящем документе, в котором раскрытая структура является компьютером или микропроцессором, запрограммированным для выполнения алгоритма, раскрытая структура является не универсальным компьютером, а специализированным компьютером, запрограммированным для выполнения раскрытого алгоритма.
[00178] Универсальный компьютер или микропроцессор может быть запрограммирован для выполнения алгоритма/этапов для создания новой машины. Универсальный компьютер становится специализированным компьютером, когда он запрограммирован для выполнения конкретных функций в соответствии с инструкциями из программного обеспечения вариантов осуществления, описанных в настоящем документе. Инструкции программы, которые выполняют алгоритм/этапы, электрическим образом изменяют универсальный компьютер, создавая электрические пути в устройстве. Эти электрические пути создают машину особого назначения для выполнения конкретного алгоритма/этапов.
[00179] Если не определено иначе, все термины (в том числе технические и научные термины), используемые в настоящем документе, имеют то же самое значение, как обычно понимаемое специалистами в области техники, которой принадлежат варианты осуществления. Далее будет подразумеваться, что термины, которые определены в обычно используемых словарях, должны интерпретироваться как имеющие значения, которые согласованы с их значением в контексте релевантной области техники, и не будут интерпретироваться в идеализированном или чрезмерно формальном смысле, если это явно не определено в настоящем документе.
[00180] В частности, если специально не заявлено иначе, как очевидно из обсуждения, во всем описании обсуждения, использующие такие термины, как "обработка", или "вычисление", или "определение", или "отображение" и т.п., относятся к действию и процессам компьютерной системы или подобного электронного вычислительного устройства, которое управляет данными и преобразовывает данные, представленные как физические (электронные) величины в регистрах и в памяти компьютерной системы, в другие данные, аналогичным образом представленные как физические величины в памяти и в регистрах компьютерной системы или других таких устройствах хранения, передачи или отображения данных.
[00181] Фиг. 40А и 40B являются вариантами осуществления устройства и детали, которые могут иметь смещающийся центр тяжести. Производственные структуры, в отличие от традиционного развертывания, не представляют собой способ развертывания с двумя состояниями (упакованный и развернутый). Имеется значительный градиент между начальным и конечным состоянием, в котором могут возникнуть возмущающие факторы и воздействовать на целостность системы или детали, что может привести к смещению центра тяжести. Смещение центра тяжести может фактически произойти от космического корабля устройства 100' к детали 3723 по мере того, как деталь растет или увеличивается. Производственный процесс также занимает неопределенное количество времени, поскольку он может быть остановлен, перезапущен или модифицирован для изменяющихся потребностей миссии. В общем случае большая структура должна быть демпфирована, и возникающие возмущающие факторы должны быть скорректированы, поскольку такие эффекты вследствие многочисленных внешних и направленных причин могут вмешаться в структурную целостность структуры. Во время производства могут потребоваться демпфирующие механизмы, чтобы смягчить или скорректировать относящиеся к производству возмущающие факторы. Могут использоваться внутренние устройства для нейтрализации движения перемещающихся элементов детали. Они могут состоять из противовесов и подвижных платформ, которые изменяют положение и скорость на основе движения перемещающейся платформы и местоположения центра тяжести (CG).
[00182] Другой подход для сокращения вибраций и факторов возмущения состоит в обратном осаждении слоев. Более конкретно, первый слой может быть нанесен справа налево. Следующий или более поздний слой детали может быть нанесен слева направо. Если осаждение круговое, может быть реализовано осаждение слоев по часовой стрелке и против часовой стрелки. Таким образом, во время процесса изготовления или производства может быть совершен путь инструмента для одного слоя построения, и чтобы противостоять факторам возмущения, вызванным этим движением, может быть выполнено противоположное движение по пути инструмента.
[00183] Центр тяжести постоянно смещается во время изготовления. Это смещение может быть предсказано и отслежено с помощью потока исходного сырья или материала из источника исходного сырья или материала, такого как, но без ограничения, канистра, к изготавливаемой структуре 3723. Хотя не показано, может использоваться датчик. Это смещение может быть сообщено внешней системе, или внешняя система может быть запрограммирована, чтобы автоматически рассеивать факторы возмущения, например, но без ограничения, с помощью пьезоэлектрического привода, противовесов/балансиров и т.д. Эта внешняя система может содержать вычислительное устройство 4050, раскрытое в настоящем документе.
[00184] Фиг. 40B является вариантом осуществления устройства 100' и детали с демпфирующими устройствами 4039 как частью детали, или прикрепленными к детали. Демпфирующие механизмы 4039 могут быть встроены во время строительства в предварительно заданные или адаптивные местоположения. Вычислительное устройство, раскрытое в настоящем документе, может использоваться для определения адаптивных местоположений. Как показано, механические руки 3750 могут размещать демпфирующие механизмы 4039. Могут быть применены как пассивные, так и активные механизмы или устройства для демпфирования вибрации. С устройствами 4039 может осуществляться проводная или беспроводная связь, или они могут функционировать как независимая система или компонент. В варианте осуществления первое демпфирующее устройство 4039 находится на первом конце детали структуры 3723, и второе демпфирующее устройство 4039 может быть расположено на противоположном конце, и они оба могут совместно работать для демпфирования структуры 3723 или детали.
[00185] Фиг. 41А является вариантом осуществления структуры, которая может быть произведена в космосе. Во время производства гибкая электропроводная сетка 4113 может быть прикреплена либо до, либо вовремя, либо после начала производства структуры или детали, раскрытого в настоящем документе. Сетка 4113 может быть натянута на поверхность или соединена с заданными местоположениями на структуре 4123 или детали таким образом, чтобы материал был полностью развернут после того, как производство завершено. В варианте осуществления сетка 4113 также может быть изготовлена совместно с изготовлением детали или структуры 4123.
[00186] Структура 4123 может принимать много форм, с том числе, но без ограничения, однородное поперечное сечение, изогнутые и угловые структуры, и коническая конфигурация. Фиг. 41B является вариантом осуществления структуры 4123, имеющей изогнутую форму, которая сужается в дальнем конце от устройства 100'. Как показано, деталь или структура 4123 с переменным поперечным сечением может быть сделана или изготовлена, как раскрыто в настоящем документе.
[00187] Фиг. 42 является вариантом осуществления структуры, которая может быть произведена в космосе. Структура 4224 или деталь производится, и во время ее изготовления могут быть прикреплены, встроены или традиционным образом развернуты элементы 4229 антенн, такие как, но без ограничения, провод. В варианте осуществления элементы 4229 антенн могут быть изготовлены вместе со структурой 4224, например, но без ограничения, тем же самым принтером, который используется для изготовления структуры. Элементы 4229 могут быть помещены непосредственно линейно или могут проходить независимым образом вокруг структуры 4224, чтобы гарантировать, что надлежащая форма создана в конце производства. Механизм 4231 выпуска провода или элемента антенн может быть присоединен к устройству 100' или может являться его частью. В варианте осуществления механизм 4231 выпуска провода может вращаться, чтобы вытеснить провод. В зависимости от желаемой конфигурации элемента 4229 антенн могут быть использованы другие подходы для выпуска, например, но без ограничения, выпуск с прямой тягой и т.д.
[00188] Фиг. 43 является вариантом осуществления структуры, которая может быть произведена в космосе. Структура 4323 или деталь создается, и сетка 4113 сплетается и прикрепляется по мере того, как производится структура 4323. Сетка 4113 может быть создана с помощью системы или компонента 4351 плетения, который может быть присоединен к устройству 100', причем для создания сетки 4113 могут использоваться гибкие материалы, такие как проволока, пластмасса и/или композитные волокна.
[00189] Как раскрыто выше относительно фиг. 41, сетка 4113 может быть положена на место, когда структура 4323 построена. Сетка 4113 может храниться в устройстве 100' и затем положена на место с помощью по меньшей мере одной из механических рук 3710, раскрытых в настоящем документе.
[00190] Когда структура произведена, устройство 100' может быть перемещено в другую позицию, и может совершаться изготовление в другой ориентации. В качестве неограничивающего примера устройство 100' может произвести неопределенно длинную балку в направлении "z" и затем сманеврировать и изменить местоположение, чтобы сделать неопределенно длинную балку в направлении "x" относительно структуры. Это обеспечивает условия не только для неопределенных линейных структур, но и для неопределенных структур во всех направлениях.
[00191] Терминология, используемая в настоящем документе, предназначена лишь для описания конкретных вариантов осуществления, а не для ограничения. Подразумевается, что используемые в настоящем документе формы единственного числа также включают в себя формы множественного числа, если контекст ясно не указывает иное. Кроме того, в той мере, в которой термины "включает в себя", "имеет", "с" или их варианты используются в подробном описании и/или в формуле изобретения, подразумевается, что такие термины являются инклюзивными подобно термину "содержит". Кроме того, если специально не заявлено, любое использование терминов "первый", "второй" и т.д. не обозначает порядок или важность, а термины "первый", "второй" и т.д. используются для различения одного элемента от другого.
[00192] Хотя выше были описаны различные раскрытые варианты осуществления, следует понимать, что они были представлены только в качестве примера, а не ограничения. Многочисленные изменения, опущения и/или дополнения к предмету, раскрытому в настоящем документе, могут быть сделаны в соответствии с вариантами осуществления, раскрытыми в настоящем документе, без отступления от сущности или объема вариантов осуществления. Кроме того, эквиваленты могут заменить его элементы без отступления от сущности и объема вариантов осуществления. Кроме того, хотя конкретный признак мог быть раскрыт относительно только одной из нескольких реализаций, такой признак может быть комбинирован с одним или более другими признаками других реализаций, если это может быть желательно и выгодно для любого заданного или конкретного применения. Кроме того, много модификаций может быть сделано для адаптации конкретной ситуации или материала к идеям вариантов осуществления без отступления от их объема.
[00193] Хотя различные аспекты настоящего раскрытия были описаны в настоящем документе, следует понимать, что они были представлены в качестве примера, а не ограничения. Для специалистов в релевантной области (областях) техники будет очевидно, что в них могут быть внесены различные изменения по форме и подробностям без отступления от сущности и объема настоящего раскрытия. Таким образом, настоящее раскрытие не должно быть ограничено ни одним из описанных выше иллюстративных аспектов, а должно быть определено только в соответствии со следующей формулой изобретения и ее эквивалентами.
[00194] Кроме того, следует понимать, что чертежи в приложениях, которые демонстрируют структуру, методологию, функциональность и преимущества настоящего раскрытия, представлены только с иллюстративной целью. Настоящее раскрытие является в достаточной степени гибким и конфигурируемым, в результате чего оно может быть реализовано иначе, чем показано на прилагаемых чертежах (например, использование устройств послойного синтеза, не упомянутых в настоящем документе, реализация в вычислительных устройствах, отличающихся от раскрытых в настоящем документе, и работа в окружающих средах, отличающихся от раскрытых в настоящем документе). Как поймут специалисты в релевантной области (областях) техники после прочтения описания в настоящем документе, некоторые признаки из разных аспектов систем, способов и компьютерных программных продуктов настоящего раскрытия могут быть комбинированы, чтобы сформировать еще одни новые аспекты настоящего раскрытия.
[00195] Кроме того, цель приведенного выше реферата состоит в том, чтобы позволить Патентному ведомству США и общественности в целом, и особенно ученым, инженерам и практикам в релевантной области (областях) техники, которые не знакомы с патентными или юридическими терминами или фразеологией, на основе беглого просмотра быстро определить природу и сущность этого технического раскрытия. В любом случае реферат не предназначен для ограничения относительно объема настоящего раскрытия.
[00196] Таким образом, широта и объем представленного здесь предмета не должны быть ограничены ни одним из явно описанных выше вариантов осуществления. Вместо этого объем вариантов осуществления должен быть определен в соответствии со следующей формулой изобретения и ее эквивалентами.
Реферат
Группа изобретений относится к производству объектов, преимущественно в среде с малой гравитацией (например, в космосе или воде). Предлагаемая система включает в себя строительное устройство (СтУ) для послойного (3D) наращивания объекта (например, космического аппарата или его частей), имеющее строительную (главным образом, протяжённую в одном направлении) область. СтУ снабжено средством приема и скрепления с объектом подаваемого к нему строительного материала. СтУ имеет хотя бы один контактирующий с объектом захват для обеспечения опоры СтУ для отвода тепла или холода от объекта, а также снятия его электризации. Предусмотрен также механизм перемещения СтУ в последовательные рабочие позиции на объекте. В процессе наращивания (или после) на объект может накладываться гибкая электропроводная сетка, а также парироваться возмущения, в т. ч. вызванные смещениями центров масс частей формируемой структуры. Технический результат состоит в расширении возможностей и снижении затрат ресурсов для создания конструкций в таких средах, как космос, вода и т. п. 5 н. и 30 з.п. ф-лы, 60 ил.
Комментарии