Трансмиссия системы рулевого управления транспортным средством - RU2566095C1
Код документа: RU2566095C1
Чертежи





















Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к трансмиссии системы рулевого управления транспортным средством и, в частности, к трансмиссии системы рулевого управления транспортным средством, содержащей входной вал и выходной вал, соединенные посредством первой пары звездочек, имеющих передаточное отношение, второй пары звездочек, имеющих передаточное отношение, и третьей пары звездочек, имеющих передаточное отношение.
УРОВЕНЬ ТЕХНИКИ
Системы рулевого управления с электроусилителем (EPAS) существуют с 1960-х гг. Лидирующие позиции на рынке традиционно занимали механизмы рулевого управления с гидроусилителем. Гидравлические системы имеют высокие паразитные потери энергии, когда гидравлический насос осуществляет перекачку, но усилитель не требуется. Первые попытки устранить данные паразитные потери были связаны с соединением электродвигателя с насосом и приведением в действие насоса только тогда, когда это необходимо.
В системах рулевого управления с электрогидравлическим усилителем электродвигатель используется для приведения в действие гидравлического насоса для питания системы рулевого управления с гидроусилителем. Такие системы являются промежуточным этапом в развитии данной отрасли производства, а их использование, вероятно, будет сокращаться с возрастающим использованием EPAS. EPAS системы обеспечивают возможность реализации уменьшенного шума, уменьшенного использования энергии, активных мер обеспечения безопасности и возможности регулирования в соответствии с условиями вождения. Однако использование таких систем оставалось ограниченным, пока последние требования C.A.F.E. не стали более трудными для выполнения. Это вынуждает производителей автомобильной техники все больше и больше прибегать к EPAS системам в стремлении улучшать экономию топлива транспортного средства. EPAS системы устраняют паразитные потери, обычно существующие в системах рулевого управления с гидроусилением. Изготовители систем, такие как Nexteer, заявляют об улучшениях в экономии топлива на 6%.
Например, одним затруднением, которое замедляло реализацию EPAS систем, было удовлетворение требования к мощности при использовании 12-вольтного электродвигателя. Недавно были разработаны системы, которые успешно решают эту проблему. Кроме того, все EPAS системы требуют блока управления для восприятия управляющего воздействия водителя и управления электродвигателем, чтобы обеспечить требуемую поддержку. Блок управления измеряет крутящий момент, вводимый водителем, и использует его для определения величины требуемой поддержки. Поддержка может быть приспособлена для удовлетворения потребности водителей в зависимости от условий вождения. Система даже способна предусматривать настраиваемое «ощущение», доступное для водителя.
Хотя основным стимулом для автомобильной EPAS является улучшение экономии топлива, EPAS имеет дополнительные преимущества. Данная система способна сделать поддержку рулевого управления доступной даже тогда, когда двигатель транспортного средства не работает. Это обеспечивает также использование доступных в настоящее время автоматических парковочных систем с параллельной парковкой.
Существует два основных типа EPAS систем: с приводом колонки и с приводом рейки. EPAS системы с приводом рейки содержат электродвигатель, который соединен с рулевой рейкой. Электродвигатель способствует перемещению рейки обычно посредством приведения в движение механизма ходового вента. EPAS системы с приводом колонки содержат электродвигатель, соединенный с рулевой колонкой. Электродвигатель способствует перемещению вала колонки обычно посредством устройства типа червячной передачи. Одно из преимуществ таких систем заключается в том, что электродвигатель может быть размещен в салоне автомобиля, освобождая полезное пространство под капотом. Это также предохраняет любые чувствительные электрические элементы от неблагоприятной среды под капотом.
Системы с приводом колонки с червячной передачей обычно используются в небольших автомобилях, в которых требования к мощности для поддержки ниже, чем требования в большегрузном транспортном средстве. Данные системы ограничены скоростью рулевого колеса и передаточным отношением червячной передачи. Рулевое колесо на своей самой высокой скорости вращается относительно медленно, приблизительно 60 об/мин. При скорости рулевого колеса 60 об/мин и передаточном отношении червячной передачи 15:1, максимальная скорость электродвигателя будет всего лишь 900 об/мин. Червячные передачи ограничены передаточными отношениями в пределах 20:1, поскольку более высокие передаточные отношения невозможны при обратном ходе.
Системы рулевого управления должны быть выполнены с возможностью работы без электропитания. Это требует, чтобы червячная передача была способна работать с шестерней, приводящей в движение червяк (при обратном ходе). Низкая скорость электродвигателя и червячная передача с ограниченным передаточным отношением вызывают потребность в высокомоментном электродвигателе. Даже при наличии высокомоментного электродвигателя, системы данного типа не были успешно реализованы на большегрузных транспортных средствах. Небольшие транспортные средства - легкие и требуют меньшего усилия для поворота рулевого колеса, соответственно позволяя использовать данные системы. EPAS системы с приводом колонки с червячной передачей являются самыми дешевыми системами и соответственно пригодны для небольших, менее дорогих транспортных средств.
Обычные системы рулевого управления с приводами с червячной передачей ограничены по своей эффективности. EPAS системы должны быть выполнены с возможностью работы при отсутствии электропитания. Вследствие склонности червячной передачи блокироваться во время обратного хода, когда передаточные отношения превышают приблизительно 20:1, эффективность EPAS систем с червячной передачей не превышает приблизительно 85% и ближе к 65% в условиях обратного хода.
В настоящее время широко используются EPAS системы с приводом колонки, которые используют все, что угодно, кроме червячной передачи для облегчения поддержки. Данные системы колонки не способны обеспечить достаточную поддержку для большегрузных транспортных средств.
Уровень техники характеризует патент США № 7887446, который раскрывает устройство трансмиссии с косозубым зубчатым ремнем. Боковой зазор D селективно увеличивается в устройстве трансмиссии с косозубым зубчатым ремнем, которое передает движущую силу посредством зацепления между косозубым зубчатым ремнем и косозубым зубчатым шкивом, то есть угол θ наклона линии зуба установлен в пределах -0,2≤1-W×θ/Pt≤0,75, где Pt - шаг зубьев, θ - угол наклона линии зуба и W - ширина ремня. Боковой зазор D между косозубым зубчатым ремнем и косозубым зубчатым шкивом установлен в пределах 1,6-3% шага Pt зубьев.
Существует потребность в трансмиссии системы рулевого управления транспортным средством, содержащей входной вал и выходной вал, соединенные посредством первой пары звездочек, имеющей передаточное отношение, второй пары звездочек, имеющей передаточное отношение, и третьей пары звездочек, имеющей передаточное отношение. Настоящее изобретение удовлетворяет данную потребность.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Основным аспектом изобретения является создание трансмиссии системы рулевого управления транспортным средством, содержащей входной вал и выходной вал, соединенные посредством первой пары звездочек, имеющей передаточное отношение, второй пары звездочек, имеющей передаточное отношение, и третьей пары звездочек, имеющей передаточное отношение.
Другие аспекты изобретения будут указаны или станут очевидными из приведенного ниже описания изобретения и прилагаемых чертежей.
Изобретение представляет собой трансмиссию системы рулевого управления транспортным средством, содержащую корпус, входной вал, соединенный с возможностью вращения с корпусом, электродвигатель, соединенный с корпусом и присоединенный к входному валу, выходной вал, соединенный с возможностью вращения с корпусом, причем входной вал и выходной вал соединены посредством первой пары звездочек, содержащей первый ремень, натянутый между ними, и имеющей первое передаточное отношение, при этом первый ремень и первая пара звездочек содержат косозубую конфигурацию, входной вал и выходной вал соединены посредством второй пары звездочек, содержащей второй ремень, натянутый между ними, и имеющей второе передаточное отношение, и входной вал и выходной вал соединены посредством третьей пары звездочек, содержащей третий ремень, натянутый между ними, и имеющей третье передаточное отношение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в и составляют часть описания, показывают предпочтительные варианты осуществления настоящего изобретения и вместе с описанием служат для объяснения принципов изобретения.
Фиг. 1 представляет собой вид в разрезе трансмиссии настоящего изобретения.
Фиг. 2 представляет собой перспективный вид трансмиссии настоящего изобретения.
Фиг. 3 представляет собой вид с пространственным разделением элементов трансмиссии настоящего изобретения.
Фиг. 4 представляет собой график эффективности трансмиссии в виде редуктора скорости.
Фиг. 5 представляет собой график эффективности трансмиссии в виде мультипликатора скорости.
Фиг. 6 представляет собой перспективный вид системы рейки с электроусилителем.
Фиг. 7 представляет собой деталь фиг. 6.
Фиг. 8 представляет собой схему системы рулевого управления.
Фиг. 9 схематично показывает размещение бесконечного косозубого зубчатого ремня, установленного на косозубом зубчатом шкиве, если смотреть с обратной стороны ремня.
Фиг. 10 представляет собой схематичный увеличенный вид, показывающий соотношения между линиями наклона зубьев косозубого зубчатого шкива и линиями наклона зубьев косозубого зубчатого ремня, входящего в зацепление с ним.
Фиг. 11 показывает половинные профили половины зуба ремня и шкива.
Фиг. 12 показывает угол косого зуба применительно к бесконечному ремню.
Фиг. 13 показывает косозубый зубчатый ремень.
Фиг. 14 показывает форму сжимаемого профиля зуба.
Фиг. 15 представляет собой деталь ременного механизма.
Фиг. 16 представляет собой перспективный вид трансмиссии настоящего изобретения в системе рулевого управления.
Фиг. 17А представляет собой вид с пространственным разделением элементов альтернативного варианта осуществления.
Фиг. 17В и 17С представляют собой детали фиг. 17А.
Фиг. 18 представляет собой вид в разрезе альтернативного варианта осуществления.
Фиг. 19А представляет собой перспективный вид эксцентрикового вала 3000.
Фиг. 19В представляет собой вид в разрезе эксцентрикового вала 3000.
Фиг. 20 представляет собой внешний перспективный вид альтернативного варианта осуществления.
Фиг. 21 представляет собой вид в разрезе альтернативного варианта осуществления.
Подробное описание предпочтительного варианта осуществления изобретения
Фиг. 1 представляет собой вид в разрезе трансмиссии настоящего изобретения. Трансмиссия 1000 настоящего изобретения содержит корпус 100. В корпусе содержится входной вал 200. Входной вал соединен с электродвигателем 201. Электродвигатель представляет собой 12-вольтный электродвигатель, известный в данной области техники. Электродвигатель прикреплен к корпусу на опоре 101 электродвигателя.
Входной вал 200 соединен с возможностью вращения с корпусом посредством первого подшипника 201 и второго подшипника 202.
На валу 200 запрессована звездочка 206. Звездочка 206 содержит зубчатую поверхность 207 для зацепления с зубчатым ремнем 400.
Промежуточная звездочка 203 соединена с возможностью вращения с валом 200 посредством подшипника 208 и игольчатого подшипника 205. Звездочка 203 свободно вращается на валу 200. Промежуточная звездочка 203 соединена со звездочкой 204, другими словами, они представляют собой один узел. Промежуточная звездочка 203 содержит зубчатую поверхность 209, а звездочка 204 содержит зубчатую поверхность 210, каждая приспособленная для зацепления с зубчатым ремнем. Диаметр зубчатой поверхности 209 больше, чем диаметр зубчатой поверхности 210. Диаметр звездочки 206 меньше, чем диаметр звездочки 204. Возможна, конечно, любая комбинация диаметров для получения требуемого передаточного отношения.
Выходной вал 300 соединен с возможностью вращения с корпусом посредством первого подшипника 301 и второго подшипника 302.
Звездочка 306 соединена с возможностью вращения с выходным валом 300 посредством подшипника 308 и игольчатого подшипника 305. Звездочка 306 содержит зубчатую поверхность 307, приспособленную для зацепления с зубчатым ремнем. Звездочка 306 соединена со звездочкой 309, которая также содержит поверхность, приспособленную для зацепления с зубчатым ремнем. Диаметр звездочки 306 больше, чем диаметр звездочки 309. Диаметр звездочки 306 меньше, чем диаметр звездочки 303. Возможна, конечно, любая комбинация диаметров для получения требуемого передаточного отношения для каждой пары звездочек.
Звездочка 303 запрессована на валу 300. Звездочка 303 содержит зубчатую поверхность 310, приспособленную для зацепления с зубчатым ремнем.
Зубчатый ремень 400 натянут между первой парой звездочек, то есть между звездочкой 206 и звездочкой 306. Передаточное отношение между звездочками 306 и 206 равно 3,4:1. Зубчатый ремень 400 представляет собой косозубый ремень, который более полно описан ниже в данном описании.
Зубчатый ремень 500 натянут между второй парой звездочек, то есть между звездочкой 203 и звездочкой 309. Передаточное отношение между звездочками 203 и 309 равно 3,0:1. Зубчатый ремень 600 натянут между третьей парой звездочек, то есть между звездочкой 204 и звездочкой 303. Передаточное отношение между звездочками 303 и 204 равно 3,0:1. Зубчатый ремень 500 и зубчатый ремень 600 не являются косозубыми, как в случае зубчатого ремня 400.
Размеры, приведенные в данном описании, являются только примерами и не должны ограничивать объем трансмиссии настоящего изобретения.
Косозубый ремень
Ниже описан косозубый ремень 400 и косозубые звездочки 206, 306. На фиг. 9 схематично показано размещение бесконечного косозубого зубчатого ремня, установленного на косозубом зубчатом шкиве, если смотреть с обратной стороны ремня. Как показано на упомянутом чертеже, косозубый зубчатый ремень 400 установлен вокруг пары косозубых зубчатых шкивов 206 и 306, которые выполнены с возможностью вращения вокруг соответствующих осей L1 и L2. Например, косозубый зубчатый шкив 306 является ведущим шкивом, и крутящий момент косозубого зубчатого шкива 306 передается ведомому шкиву 206 посредством косозубого зубчатого ремня 400. На фиг. 9 косозубый зубчатый ремень 400, показанный сплошной линией, показывает расположение косозубого зубчатого ремня сразу после установки ремня. А штрихпунктирная линия, обозначенная ссылочной позицией 400′, показывает положение косозубого зубчатого ремня 400 после приведения в действие устройства трансмиссии с ременным приводом.
Сразу после установки косозубого зубчатого ремня 400 на косозубые зубчатые шкивы 206 и 306 (до приведения в действие устройства трансмиссии с ременным приводом), линии наклона зубьев косозубого зубчатого ремня 400 совпадают с линиями наклона зубьев косозубых зубчатых шкивов 206 и 306, так что продольное направление косозубого зубчатого ремня 400 по существу перпендикулярно осям L1 и L2 вращения косозубых зубчатых шкивов 206 и 306. Но когда косозубый зубчатый шкив 306 или ведущий шкив приводят в движение и на косозубый зубчатый ремень 400 действует нагрузка, косозубый зубчатый ремень 400 скользит вдоль линий наклона зубьев шкивов, таким образом возникает тяга. То есть, когда устройство трансмиссии с ременным приводом приводят в действие, косозубый зубчатый ремень 400 скользит на косозубом зубчатом шкиве 206 в направлении А вдоль оси L1 вращения, и скользит на косозубом зубчатом шкиве 306 в направлении В, которое противоположно направлению А, вдоль оси L2 вращения, как показано на фиг. 9. Таким образом, косозубый зубчатый ремень 400, показанный сплошной линией, перемещается в положение 10′, которое показано штрихпунктирной линией. Данный вид тяги является значительным, когда устройство трансмиссии с ременным приводом работает с большой нагрузкой или при вращении с высокой скоростью.
Фиг. 10 представляет собой схематичный увеличенный вид, показывающий отношения между линиями наклона зубьев косозубого зубчатого шкива 306 и линиями наклона зубьев косозубого зубчатого ремня 400, находящегося в зацеплении с ним, после начала работы устройства трансмиссии с ременным приводом или после появления тяги. Как показано на данном чертеже, линия 411 наклона зуба косозубого зубчатого ремня 400 отклоняется относительно линии 31 наклона зуба косозубого зубчатого шкива 306 на величину углов, при которой ремень становится скошенным в результате скольжения, так что линия 411 наклона зуба отходит от линии 31 наклона зуба. Когда между линией наклона зуба косозубого зубчатого ремня 400 и линией наклона зуба косозубого зубчатого шкива 306 появляется зазор, возникает ненадлежащий контакт между шкивом и ремнем. Например, выступ (деталь, соединяющая рабочую боковую поверхность и верхнюю цилиндрическую поверхность зуба) шкива контактирует с сопряженной боковой поверхностью ремня, или т.п. Такое ненадлежащее зацепление порождает шум и вибрацию. Отмечается, что, как можно видеть из фиг. 9, подобные явления возникают на косозубом зубчатом шкиве 206.
Для того чтобы решить такие проблемы, селективно увеличивают люфт между ремнем и шкивом в первом варианте осуществления настоящего изобретения, чтобы предотвратить ненадлежащий контакт между зубьями шкива и зубьями ремня и уменьшить шум и вибрацию. Ссылаясь на фиг. 11, будет объяснен термин «люфт» в данном варианте осуществления.
На фиг. 11 показаны профили половин зубьев ремня и шкива. Сплошная кривая линия Р1 показывает профиль зуба шкива, а пунктирная кривая линия Р2 показывает профиль зуба ремня. Прямая штрихпунктирная линия В представляет собой базовую линию на нижнем участке ремня, так что высота Н зуба определяется высотой от базовой линии В до вершины зуба ремня. Кроме того, дуга С, которая также показана штрихпунктирной линией, представляет собой дугу, которая проходит через точку, которая удалена от базовой линии В на половину расстояния высоты Н зуба (1/2Н), и ее центр совпадает с центром шкива. То есть диаметр дуги С эквивалентен величине, полученной в результате вычитания высоты Н зуба из внешнего диаметра шкива. Люфт между ремнем и шкивом определяется расстоянием D между зубом шкива и зубом ремня в положении вдоль дуги С (расстоянием между точкой пересечения кривой Р1 с дугой С и точкой пересечения кривой Р2 с дугой С).
Ниже, ссылаясь на фиг. 12, будет описан угол косого зуба, применительно к бесконечному ремню первого варианта осуществления. Фиг. 12 представляет собой часть схематичной развертки косозубого зубчатого ремня 400, которая относится к первому варианту осуществления. Линии наклона зубьев косозубого зубчатого ремня 400 показаны наклонными сплошными линиями, которые расположены в поперечном направлении ремня. При этом шаг зубьев ремня обозначен Pt, а ширина обозначена W. Кроме того, если обозначить θ угол (угла винтовой линии зуба) между линией в поперечном направлении ремня (или линией, перпендикулярной продольному направлению ремня) и линией наклона зуба, то промежуток d между концом зацепления первого зуба и началом зацепления соседнего второго зуба определяется как d=Pt-W×θ, где Pt - шаг, W - ширина ремня и θ - угол винтовой линии зуба. В первом варианте осуществления угол θ винтовой линии зуба установлен так, чтобы соответствовать условию -0,2≤d/Pt=1-W×θ/Pt≤0,75.
В обычном устройстве трансмиссии с косозубым зубчатым ремнем, хотя люфт D установлен так, чтобы соответствовать 1,5% относительно шага Pt зубьев, люфт D устройства трансмиссии с косозубым зубчатым ремнем первого варианта осуществления установлен в пределах 1,6-3% (D/Pt×100) шага Pt зубьев.
То есть в устройстве устройства трансмиссии с косозубым зубчатым ремнем первого варианта осуществления ненадлежащий контакт между зубьями шкива и ремня предотвращен даже в том случае, если тяга вызывается на ремне, когда на ремень воздействует большая нагрузка во время работы, за счет установки люфта D широко (широкого люфта), например в пределах 1,6-3% шага Pt зубьев. Кроме того, это особенно эффективно для углов θ винтовой линии зуба, которые соответствуют условию - 0,2≤d/Pt≤0,75. То есть шум и вибрация могут быть уменьшены в пределах широкого диапазона углов θ винтовой линии зуба (даже для малого угла, который не очень эффективен для сжимаемого профиля зуба). Как было описано выше, в соответствии с первым вариантом осуществления, шум и вибрация эффективно уменьшены для устройства трансмиссии с косозубым зубчатым ремнем, которое приводится в действие при большой нагрузке или при вращении с высокой скоростью.
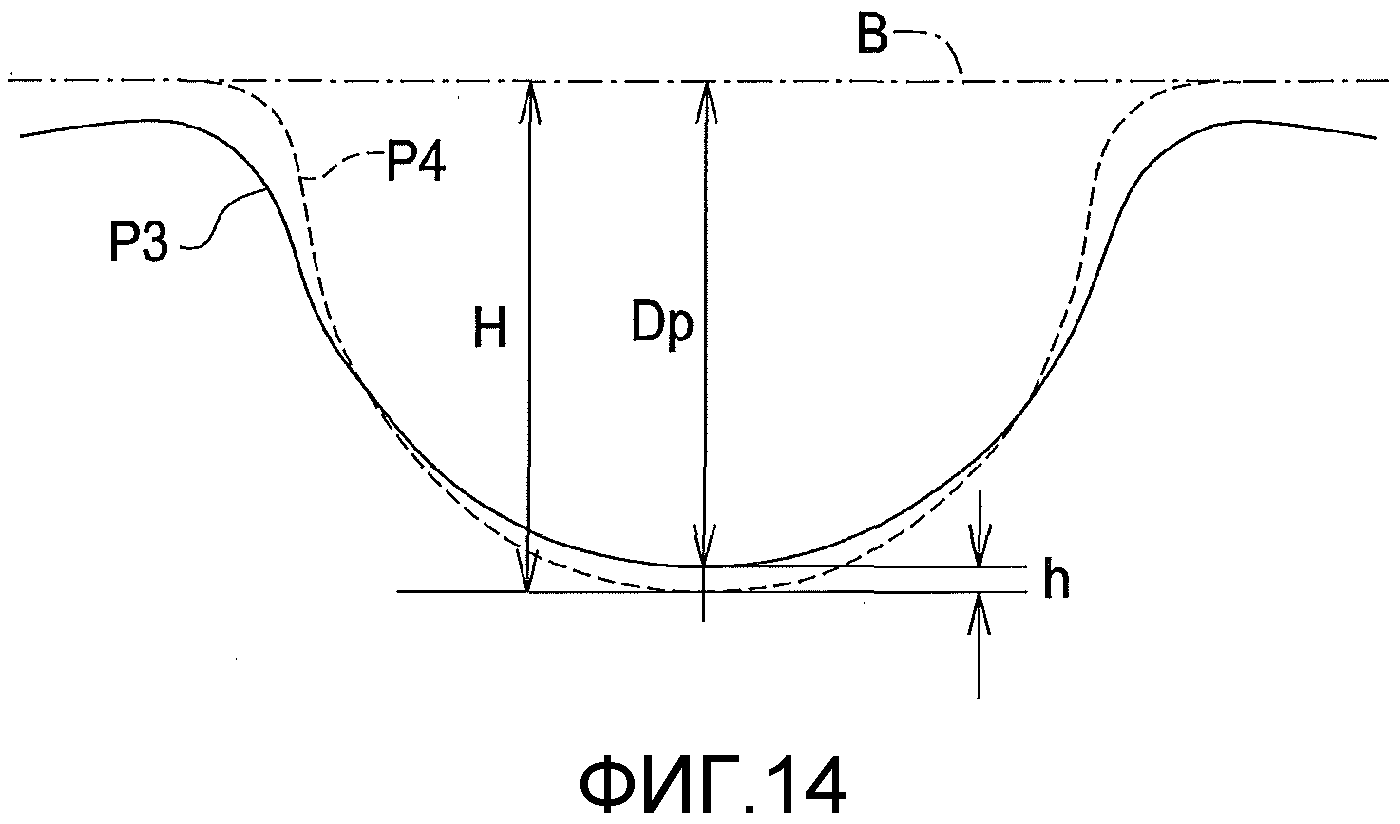
Ниже, со ссылкой на фиг. 13 и 14, будет описано устройство трансмиссии с ременным приводом второго варианта осуществления настоящего изобретения. Фиг. 13 представляет собой часть схематичной развертки косозубого зубчатого ремня 400, которая относится к второму варианту осуществления. Линии наклона зубьев косозубого зубчатого ремня 400 показаны наклонными сплошными линиями, которые расположены в поперечном направлении ремня. Кроме того, на фиг. 14 показана форма сжимаемого профиля зуба, используемого во втором варианте осуществления.
В ремне трансмиссии с ременным приводом второго варианта осуществления, угол θ винтовой линии зуба установлен в пределах d/Pt=1-Wtanθ/Pt≤0. То есть, как показано на фиг. 13, величина d равна 0 или отрицательная, так что зацепление соседнего второго зуба начинается до окончания зацепления первого зуба (или одновременно с окончанием зацепления).
На фиг. 14 кривая Р3, показанная сплошной линией, показывает профиль зуба косозубых зубчатых шкивов 206 и 306 второго варианта осуществления, а кривая Р4, показанная пунктирной линией, показывает профиль зуба косозубого зубчатого ремня 400 второго варианта осуществления. Кроме того, штрихпунктирная линия В показывает базовую линию ремня, когда ремень установлен. Глубина Dp канавки, глубина от базовой линии В до цилиндрической поверхности основания зуба шкива, меньше чем высота Н зуба ремня на h. Поэтому, когда косозубый зубчатый ремень 400 натягивают вокруг косозубых зубчатых шкивов 206 и 306 и задают натяжение, зубья ремня прижимаются к цилиндрической поверхности основания зубьев шкива и подвергаются сжатию. Таким образом, точность размещения каждого из зубьев ремня относительно канавок шкивов улучшается так, что уменьшается суммарная погрешность между зубьями ремня и зубьями шкивов, и предотвращается ненадлежащий контакт между зубьями ремня и зубьями шкивов. Отмечается, что во втором варианте осуществления сжимаемость (h/H×100) косозубого зубчатого ремня установлена в пределах 1,5-5%.
Как было описано выше, в соответствии с вторым вариантом осуществления, шум и вибрация эффективно уменьшены в устройстве трансмиссии с косозубым зубчатым ремнем, в котором угол θ винтовой линии зуба находится в пределах d/Pt=1-Wθ/Pt≤0, и когда упомянутое устройство приводят в действие под большой нагрузкой или при вращении с высокой скоростью, посредством предотвращения ненадлежащего контакта между зубьями ремня и зубьями шкивов. Отмечается, что устройство трансмиссии с косозубым зубчатым ремнем второго варианта осуществления особенно эффективно вблизи резонансной частоты пролета.
Передаточное отношение рулевого механизма представляет собой отношение количества градусов перемещения рулевого колеса на один градус перемещения переднего колеса. Передаточное отношение рулевого механизма 20:1 требует 20 градусов перемещения рулевого колеса для перемещения передних колес на один градус. Более мощные системы рулевого управления имеют передаточные отношения в пределах примерно между 12:1 и 24:1. Передаточные отношения 12:1 используются для спортивных автомобилей. Большие автомобили-пикапы могут иметь передаточное отношение примерно 24:1.
Система настоящего изобретения состоит из ряда ремней, размещенных на двух общих осях, то есть на входном и выходном валах. Система настоящего изобретения обеспечивает передаточное отношение 30,6:1 усиления крутящего момента от электродвигателя до выходного вала 300. Это осуществляется через три ступени 3,4:1, 3:1 и 3:1.
Первая ступень, ближайшая к электродвигателю 201, приспособлена для передаточного отношения 3,4:1. Звездочки 206 и 306 первой ступени используют косозубые звездочки и косозубый ремень для минимизации шума на данном высокоскоростном ремне. Следующие две ступени звездочек используют зубчатый ремень с шагом зубьев 5 мм. Выбранные комбинации зубьев звездочек приспособлены для поддержания одинакового межцентрового расстояния для обоих вариантов шагов.
Фиг. 6 представляет собой перспективный вид реечной системы с электроусилителем в соответствии с известным уровнем техники. Упомянутая система обычно содержит рулевую колонку (S) и рейку (R). Рулевое колесо соединено с рулевой колонкой, посредством которой воспринимается управляющее воздействие водителя для управления транспортным средством. Упомянутая рейка также известна в данной области техники как система рулевого управления с механизмом реечной передачи.
Механизмы реечной передачи обычно характеризуются количеством дюймов перемещения рейки на один оборот шестерни. Точное требуемое передаточное отношение рейки зависит от геометрии рулевого механизма. Передаточные отношения рулевого механизма 24:1 и 12:1 могут иметь передаточное отношение рейки 1,57:1 и 2,62:1 соответственно. Передаточное отношение реечного механизма может быть изменено через рейку. Это осуществляется посредством изменения профиля зубьев рейки вдоль рейки. Это изменяет радиус контакта с шестерней. Изменение радиуса контакта изменяет величину перемещения рейки на один оборот шестерни. Данное изменение передаточного отношения ограничено максимумом 15% через рейку.
Фиг. 7 представляет собой деталь фиг.6. Известная система рулевого управления с электроусилителем содержит ремень (В), приводимый в движение электродвигателем (М). Ремень натянут между двумя звездочками (S1) и (S2) и приводит в движение рейку (WG) червячной передачи. Когда водитель вращает рулевое колесо, блок управления (не показанный) принимает сигнал, который затем запускает электродвигатель (М), чтобы соответственно приводить в движение ремень. Когда ремень вращается, звездочка (S2) приводит в движение рейку червячной передачи аксиально, чтобы перемещать колеса транспортного средства с возможностью управления.
Мощность, требующаяся для управления передними колесами транспортного средства, является максимальной, когда транспортное средство не движется. Более тяжелое транспортное средство также требует большей мощности для управления. Ниже приведен примерный расчет мощности, требующейся для управления передними колесами остановленного транспортного средства.
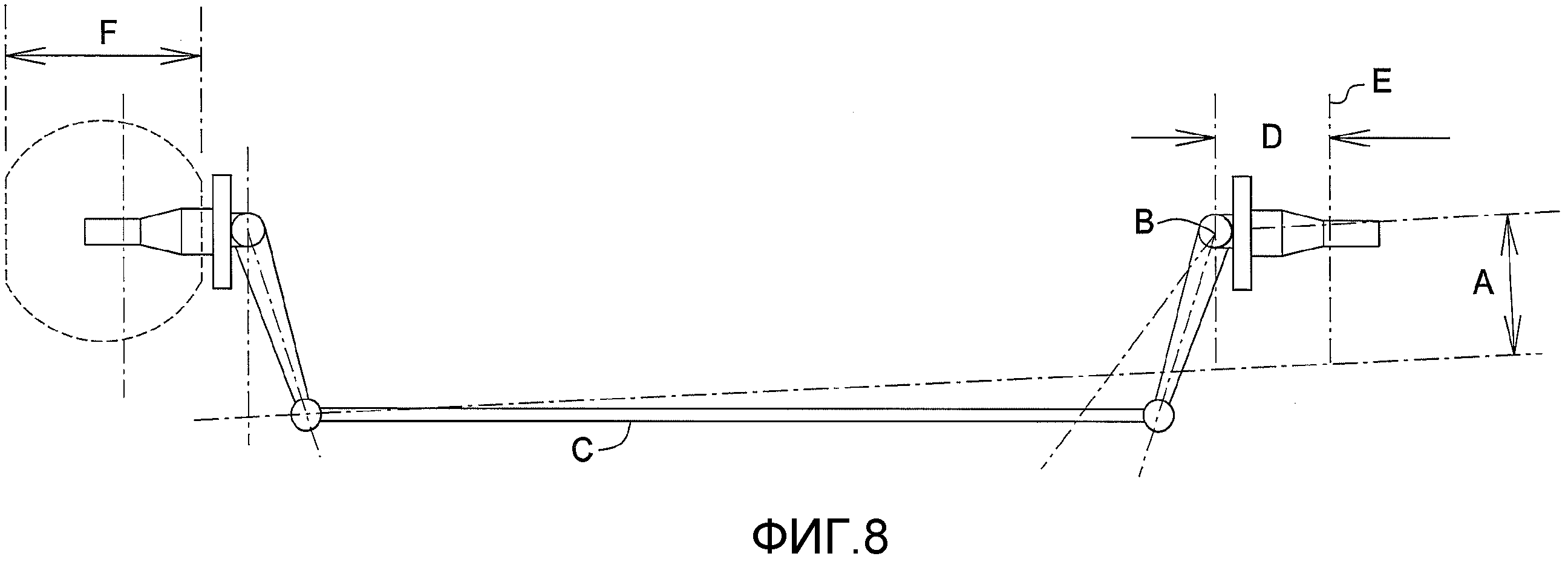
Необходимо определить геометрические термины применительно к системам рулевого управления. Минимальная эффективная длина (А) толкающей штанги представляет собой наименьшее эффективное расстояние от центра (В) поворота до поперечной рулевой тяги (С). Данная длина обычно рассматривается, когда колеса полностью повернуты. Смещение (D) поворотного шкворня представляет собой расстояние от центральной линии колеса (Е) до центра (В) поворота. Ширина (F) шины представляет собой ширину пятна контакта между шиной и поверхностью дороги.
Для иллюстрации изобретения приведена следующая информация:
Крутящий момент М, требующийся для управления колесами, можно вычислить по следующей формуле:


Если предположить, что полное угловое смещение колеса равно 85° и для поворота рулевого колеса от упора до упора требуется 2 секунды, то требуемая мощность может быть вычислена следующим образом:
Тогда угловая скорость колес во время поворота:


Мощность, требующаяся без каких-либо потерь в системе:


Если предположить, что система рулевого управления транспортным средством обладает эффективностью 70%, система обладает эффективностью 80%, и червячная передача обладает эффективностью 80%, то требуемая мощность равна:



С другой стороны, система настоящего изобретения использует три ременные ступени. Фиг.4 представляет собой график эффективности трансмиссии в виде редуктора скорости. Фиг. 5 представляет собой график эффективности трансмиссии в виде мультипликатора скорости. Используя данную информацию в качестве заменителя для определения эффективности предлагаемой системы, ожидается, что система настоящего изобретения будет постоянно обладать эффективностью 95%.
Эксплуатация, режим поддержки электродвигателя
При эксплуатации водитель будет вращать рулевое колесо транспортного средства, которое соединено с валом 300. Обычная система транспортного средства будет включать в себя блок управления для восприятия управляющего воздействия водителя и управления электродвигателем 201, чтобы обеспечить требуемую поддержку посредством трансмиссии 1000. Например, блок управления измеряет крутящий момент управляющего воздействия водителя и использует его для определения величины поддержки, требуемой от электродвигателя 201. Поддержка может быть приспособлена для обеспечения потребности водителя в зависимости от условий вождения.
Когда поддержка востребована блоком управления или электронным блоком управления (ECU), запущенный электродвигатель будет прикладывать крутящий момент к валу 200, который в свою очередь передает крутящий момент на звездочку 206. Во время эксплуатации входной вал 200 может вращаться со скоростью до 1800 об/мин. Это приводит к скорости вращения выходного вала приблизительно 60 об/мин с учетом редукции посредством трансмиссии 30,6:1, которая характеризует обычный верхний предел. Использование косозубого ремня 400 и косозубых звездочек 206, 306 значительно уменьшает шум при относительно высокоскоростной работе ремней. Прямозубые зубчатые ремни, такие как ремень 500 и ремень 600, способны создавать шум или визг при приведении в движение и высоких скоростях. Косой зуб обеспечивает более плавное сцепление между зубьями ремня и канавками звездочки во время работы.
Скорость вала не является существенной проблемой для ремня 500 и ремня 600, поскольку они работают при максимальной скорости 1800/3,4=529 об/мин (ремень 400) и 529/3,0=176 об/мин (ремень 500), и 176/3,0=58 об/мин (ремень 600).
Зубчатый ремень 400 передает усилие от звездочки 206 на звездочку 306, которая в свою очередь прикладывает крутящий момент к звездочке 309. Звездочка 309 приводит в движение звездочку 203 посредством ремня 500. Звездочка 204 приводит в движение звездочку 303 посредством ремня 600.
Таким образом, передача крутящего момента в режиме поддержки осуществляется от электродвигателя 201 на вал 200 на звездочку 206 на ремень 400 на звездочку 306 на звездочку 309 на ремень 500 на звездочку 203 на звездочку 204 на ремень 600 на звездочку 303 на вал 300.
Эксплуатация, режим без поддержки
Когда электрическая поддержка востребована блоком управления, управляющее воздействие водителя будет прикладывать крутящий момент к валу 300. Хотя вал 300 вращается, поскольку электродвигатель 201 выключен, он будет вращаться свободно, и система будет работать так, как если бы никакого электродвигателя не было.
Фиг. 2 представляет собой перспективный вид трансмиссии настоящего изобретения. Электродвигатель 201 прикреплен к корпусу 100. Корпус 100 заключает в себе звездочки и ремни, предохраняя их от мусора.
Фиг. 3 представляет собой вид с пространственным разделением элементов трансмиссии настоящего изобретения. Система настоящего изобретения относительно компактная. В одном корпусе 100 размещены три ременные ступени. Корпус достаточно компактный, чтобы обеспечить возможность установки в системе рулевого управления транспортным средством. Кроме того, в зависимости от требуемого крутящего момента, ширина каждого ремня может быть увеличена или уменьшена.
Система настоящего изобретения выполнена полностью с возможностью изменения масштаба. На основании вычислений усилий, требуемых для поворота рулевого колеса в системе небольшого автомобиля, системы червячной передачи обеспечивают приблизительно 80% крутящего момента, необходимого для управления остановленного транспортного средства. Существующие червячные системы обеспечивают приблизительно 30 Нм поддержки. Система настоящего изобретения приспособлена для обеспечения поддержки для тяжелых транспортных средств типа грузовиков-пикапов, требующих 70 Нм поддержки. Для того чтобы обеспечить такой же уровень поддержки крутящего момента, как существующие системы червячной передачи, ширина ремней может быть сужена для оптимизации их расчетной ширины, и требуемый крутящий момент электродвигателя может быть уменьшен за счет дополнительного механического преимущества передаточного отношения 30,6:1 для трансмиссии настоящего изобретения. Ожидается, что трансмиссия настоящего изобретения способна обеспечить до приблизительно 150 Нм поддержки.
Ремни могут быть также сделаны более широкими, чтобы обеспечить более значительную поддержку для таких применений, как тяжелые грузовики или автобусы. По оценкам, большие грузовики-пикапы требуют момента приблизительно 90 Нм для вращения колес на остановленном транспортном средстве, который преобразуется в приблизительно 70 Нм требуемой поддержки.
Фиг. 15 представляет собой деталь ременного устройства. Зубчатый ремень 400 натянут между первой парой звездочек, то есть между звездочкой 206 и звездочкой 306. Зубчатый ремень 500 натянут между второй парой звездочек, то есть между звездочкой 203 и звездочкой 309. Зубчатый ремень 600 натянут между третьей парой звездочек, то есть между звездочкой 204 и звездочкой 303.
Фиг. 16 представляет собой перспективный вид трансмиссии настоящего изобретения в системе рулевого управления. Рулевая колонка (S) соединена с одним концом вала 300. Другой конец вала 300 соединен с входным участком рулевой рейки (R). Рулевая рейка (R) известна в данной области техники и обычно содержится в системе, известной как реечная система рулевого управления. Рулевая колонка (S) обычно соединена с рулевым колесом, посредством которого водитель управляет транспортным средством.
Фиг. 17 представляет собой вид с пространственным разделением элементов альтернативного варианта осуществления. В данном альтернативном варианте осуществления устройство настоящего изобретения выполнено так, что ведущие звездочки расположены на общих центрах, но каждая ось закрепления звездочки выполнена с возможностью регулирования для надлежащего натяжения каждого ремня. Это осуществляется посредством закрепления каждой звездочки на валах со смещенными, или эксцентриковыми, диаметрами. Надлежащее натяжение ремня важно для предотвращения скачкообразного движения (проскакивания зубьев) и для максимизации срока службы ремня.
В частности, первый эксцентриковый вал 2000 и второй эксцентриковый вал 3000, каждый выполнен так, что монтажные диаметры валов расположены на общей оси с монтажным диаметром промежуточной звездочке, которая содержит вторую ось, которая смещена, но параллельна монтажной оси вала. Второй эксцентриковый вал 3000 выполнен так, что отверстие 3001 расположено на общей оси, которая коаксиальна с валом 303. Упомянутое отверстие позволяет выходному валу 303 проходить через второй эксцентриковый вал 3000. Выходной вал 303 соединен с валом рулевого управления транспортным средством.
Ссылаясь на фиг. 17, эксцентриковый вал 2000 соединен с электродвигателем 201. Эксцентриковый вал 2000 соединен с возможностью вращения с корпусом 100 посредством подшипника 202. Звездочка 203 соединена с возможностью вращения с эксцентриковым валом 2000 посредством подшипника 208 и подшипника 250.
Эксцентриковый вал 3000 содержит отверстие 3001. Выходной вал 300 вставлен в отверстие 3001. Звездочка 306 соединена с возможностью вращения с эксцентриковым валом 3000 посредством подшипника 308 и игольчатого подшипника 251. Эксцентриковый вал 3000 соединяется с возможностью скольжения с корпусом 100 так, что эксцентриковый вал 3000 можно вращать во время регулирования натяжения ремня.
Стопорный диск 280 входит в зацепление с эксцентриковым валом 3000 посредством отверстия 284 стопорного диска. Стопорный диск 280 прикреплен к корпусу 100 при помощи крепежных средств 281. Стопорный диск 280 используется в качестве регулировочного элемента для регулирования посредством вращения и фиксирования положения эксцентрикового вала 3000 относительно корпуса 100, чтобы регулировать натяжение ремня.
Стопорный диск 290 соединяется с эксцентриковым валом 2000 посредством отверстия 294 стопорного диска. Стопорный диск 290 прикреплен к корпусу 100 при помощи крепежных средств 291. Стопорный диск 290 используется в качестве регулировочного элемента для регулирования посредством вращения и фиксирования положения эксцентрикового вала 2000 относительно корпуса 100, чтобы регулировать натяжение ремня.
Регулирование натяжения каждого ремня осуществляется посредством вращения каждого эксцентрикового вала 2000, 3000, тем самым регулируя натяжение каждого ремня в отдельности. Затем положение каждого вала 2000, 3000 фиксируют посредством использования каждого стопорного диска 290, 280 соответственно, чтобы поддерживать натяжение. Надлежащее натяжение для каждого ремня может быть определено известными средствами, такими как частотный анализ или прогиб пролета. Сначала должен быть натянут ремень 400, после этого промежуточный ремень 500 и затем ремень 600, установленный на звездочке 207 электродвигателя. Корпус 100 может быть снабжен отверстиями для доступа, чтобы обеспечить измерение натяжения. Электродвигатель 201 прикреплен к корпусу 100 с возможностью перемещения для регулирования межцентрового расстояния звездочки 207 для надлежащего натяжения ремня 600.
Фиксирование отрегулированного положения каждого эксцентрикового вала осуществляется посредством использования каждого стопорного диска 280, 290 и крепежных средств 281, 291, обычно болтов. Каждый стопорный диск 280, 290 выполнен так, что он вращается с соответствующим ему эксцентриковым валом. Каждый стопорный диск содержит радиальные пазы 282, 292, которые совмещаются с монтажными приливами 110 для болтов в корпусе 100. Окружное расположение радиальных пазов 282, 292 и монтажных приливов 110 для болтов такое, что независимо от углового положения стопорного диска два отверстия (прилива) под болты всегда будут открытыми и доступными для использования.
Для того чтобы зафиксировать угловое положение вала, устанавливают натяжение ремня, и затем болты пропускают через радиальные пазы в каждом стопорном диске и в монтажные приливы для болтов.
Фиг. 17В и 17С представляют собой детали фиг. 17А.
Фиг. 18 представляет собой вид в разрезе альтернативного варианта осуществления. Вал 102 от электродвигателя 100 совмещен с эксцентриковым валом 2000, однако они механически не соединены, поэтому вал 102 электродвигателя вращается независимо от эксцентрикового вала 2000. Участок 2005 зацепления с инструментом расположен на одном конце вала 2000 и используется для зацепления с инструментом (не показанным), посредством которого вал 2000 вращают.
Каждая из звездочек 203 и 306 соединена с возможностью вращения с соответствующим ей эксцентриковым валом, и поэтому каждый вращается вокруг соответствующего ему эксцентрикового вала 2000, 3000. Каждый эксцентриковый вал 2000, 3000 не вращается во время работы устройства. Зато каждый эксцентриковый вал выполнен с возможностью вращения только во время установки и с целью регулирования натяжения ремня. При этом каждый эксцентриковый вал фиксируют на месте посредством соответствующего стопорного диска 290, 280.
Звездочка 207 запрессована на валу электродвигателя. Звездочка 303 запрессована на выходном валу 300. Выходной вал 300 выполнен с возможностью вращения во втулке 310 подшипника.
Фиг.19А представляет собой перспективный вид эксцентрикового вала 3000. Монтажные диаметры 3002, 3003 вала контактируют с корпусом 100. Подшипники 308 и 305 прикреплены к монтажному диаметру 3004 звездочки. Участок 3005 зацепления с инструментом расположен на одном конце вала 3000 и используется для зацепления с инструментом (не показанным), посредством которого вал 3000 вращают.
Фиг. 19В представляет собой вид в разрезе эксцентрикового вала 3000. Монтажные диаметры 3002, 3003 вала центрированы относительно оси А-А. Монтажный диаметр 3004 звездочки центрирован относительно оси В-В. Ось А-А смещена или эксцентрична от оси В-В на заданном расстоянии.
Фиг. 20 представляет собой внешний перспективный вид альтернативного варианта осуществления. Стопорный диск 290 прикрепляют к корпусу 100 при помощи крепежных средств 291. Каждое крепежное средство (болт) пропускают через радиальный паз 292 в соответствующий прилив 110. Эксцентриковый вал 2000 контактирует с стопорным диском 290 на участке 2005. Заглушки 299 закрывают отверстия 299А, которые обеспечивают доступ к ремням через корпус 100.
Электродвигатель 201 прикреплен к опоре 101 посредством крепежных средств 1011. Каждое крепежное средство 1011 входит в паз 1010 в опоре 101. Пазы 1010 допускают перемещение электродвигателя 201 при регулировании и фиксировании натяжения ремня.
Фиг. 21 представляет собой вид в разрезе альтернативного варианта осуществления. В данном варианте осуществления зубчатый ремень 400, зубчатый ремень 500 и зубчатый ремень 600 заменены многореберным ремнем 4000, многореберным ремнем 5000 и многореберным ремнем 6000 соответственно. В многореберном ремне множество ребер продолжаются в бесконечном направлении ремня. Соответствующие поверхности зацепления с ремнем на звездочках также изменены так, чтобы приспосабливаться к многореберным ремням.
Зубчатая поверхность звездочки 303 заменена многореберной поверхностью 3030. Зубчатая поверхность звездочки 203 заменена многореберной поверхностью 2030. Зубчатая поверхность звездочки 306 заменена многореберной поверхностью 3060. Зубчатая поверхность звездочки 204 заменена многореберной поверхностью 2040. Зубчатая поверхность звездочки 309 заменена многореберной поверхностью 3090. Зубчатая поверхность звездочки 206 заменена многореберной поверхностью 2060. Ремень 4000 входит в зацепление со шкивом 2070 с многореберной поверхностью, который в свою очередь соединен с электродвигателем 201. Никаких других изменений в устройстве настоящего изобретения не осуществлено. В альтернативном варианте осуществления шкив 2070 с многореберной поверхностью заменен зубчатой звездочкой 207, и многореберная поверхность 3060 заменена звездочкой 306 с зубчатой поверхностью, таким образом трансмиссия содержит зубчатый ремень 400, натянутый между звездочкой 306 и звездочкой 207, и многореберный ремень 5000 - между многореберными шкивами 2030 и 3090, и многореберный ремень 6000, натянутый между многореберными шкивами 2040 и 3030.
Для того чтобы обеспечить широкий круг применений, в трансмиссии настоящего изобретения могут быть использованы перечисленные ниже комбинации ремней. Данные примерные комбинации не ограничивают множество комбинаций, доступных для использования с данной трансмиссией. Каждая ссылочная позиция относится к ремню, который упоминается в данном описании.
Каждый ремень натянут на соответствующую комбинацию зубчатых звездочек или многореберных шкивов, которая описана в данном документе, то есть каждый ремень натянут между указанными звездочками или шкивами:
Отмечается, что хотя регулирование эксцентрика предусмотрено как часть варианта осуществления, показанного на фиг.21, в альтернативном варианте осуществления не требуется никакого регулирования эксцентрика для валов. Зато первый, второй и третий многореберные ремни способны растягиваться в длину на небольшую величину, чтобы обеспечить натягивание на соответствующие звездочки. Многореберные ремни, которые способны растягиваться в длину, называются «низкомодульными» ремнями и известны в данной области техники.
Хотя в данном документе описаны варианты осуществления изобретения, для специалистов в данной области техники будет очевидно, что в конструкции и расположении деталей могут быть внесены изменения без отхода от сущности и объема изобретения, описанного в данном документе.
Реферат
Изобретение относится к трансмиссии систем рулевого управления транспортным средством. Трансмиссия содержит корпус, входной вал, соединенный с возможностью вращения с корпусом, электродвигатель, соединенный с корпусом и присоединенный к входному валу, выходной вал, соединенный с возможностью вращения с корпусом. Входной вал и выходной вал соединены посредством первой пары звездочек, содержащей первый ремень, натянутый между ними, и имеющей первое передаточное отношение. При этом первый ремень и первая пара звездочек имеют косозубую конфигурацию. Входной вал и выходной вал соединены посредством второй пары звездочек, содержащей второй ремень, натянутый между ними, и имеющей второе передаточное отношение. Входной вал и выходной вал соединены посредством третьей пары звездочек, содержащей третий ремень, натянутый между ними, и имеющей третье передаточное отношение. Изобретение позволяет повысить технические характеристики трансмиссии, снизить шум и вибрацию в процессе эксплуатации. 5 н. и 20 з.п. ф-лы, 21 ил.
Формула
Документы, цитированные в отчёте о поиске
Трансмиссия транспортного средства
Комментарии