Автоматическое натяжное устройство - SU1631213A1
Код документа: SU1631213A1
Чертежи
Описание
$/.;
Изобретение относится к машиностроению и может быть использовано в реверсивных передачах с гибкой связью для передачи крутящего момента в обход препятствия и с меняющимся в процессе работы межцентровым расстоянием.
Целью изобретения является расширение функциональных возможностей и повышение ремонтопригодности.
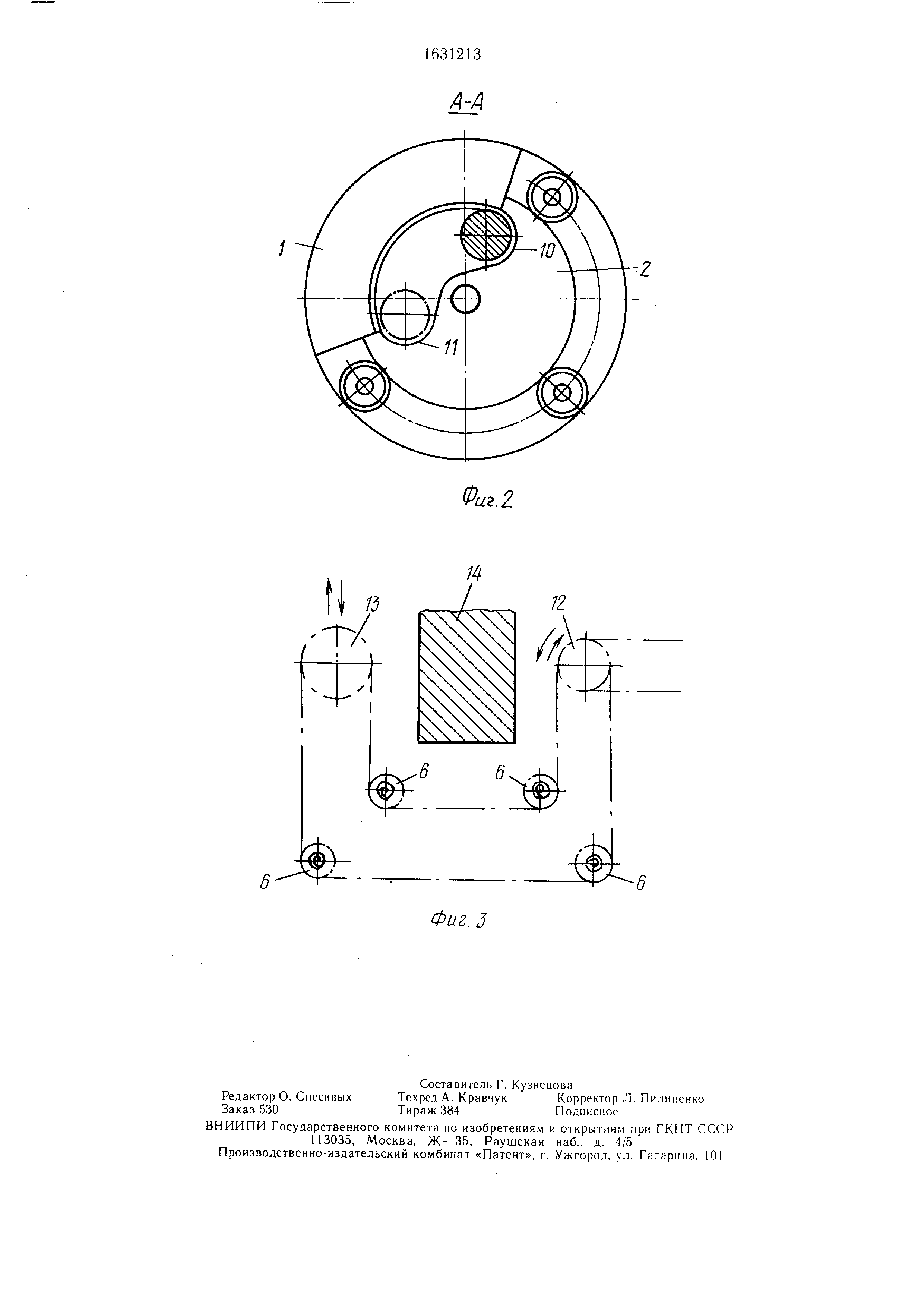
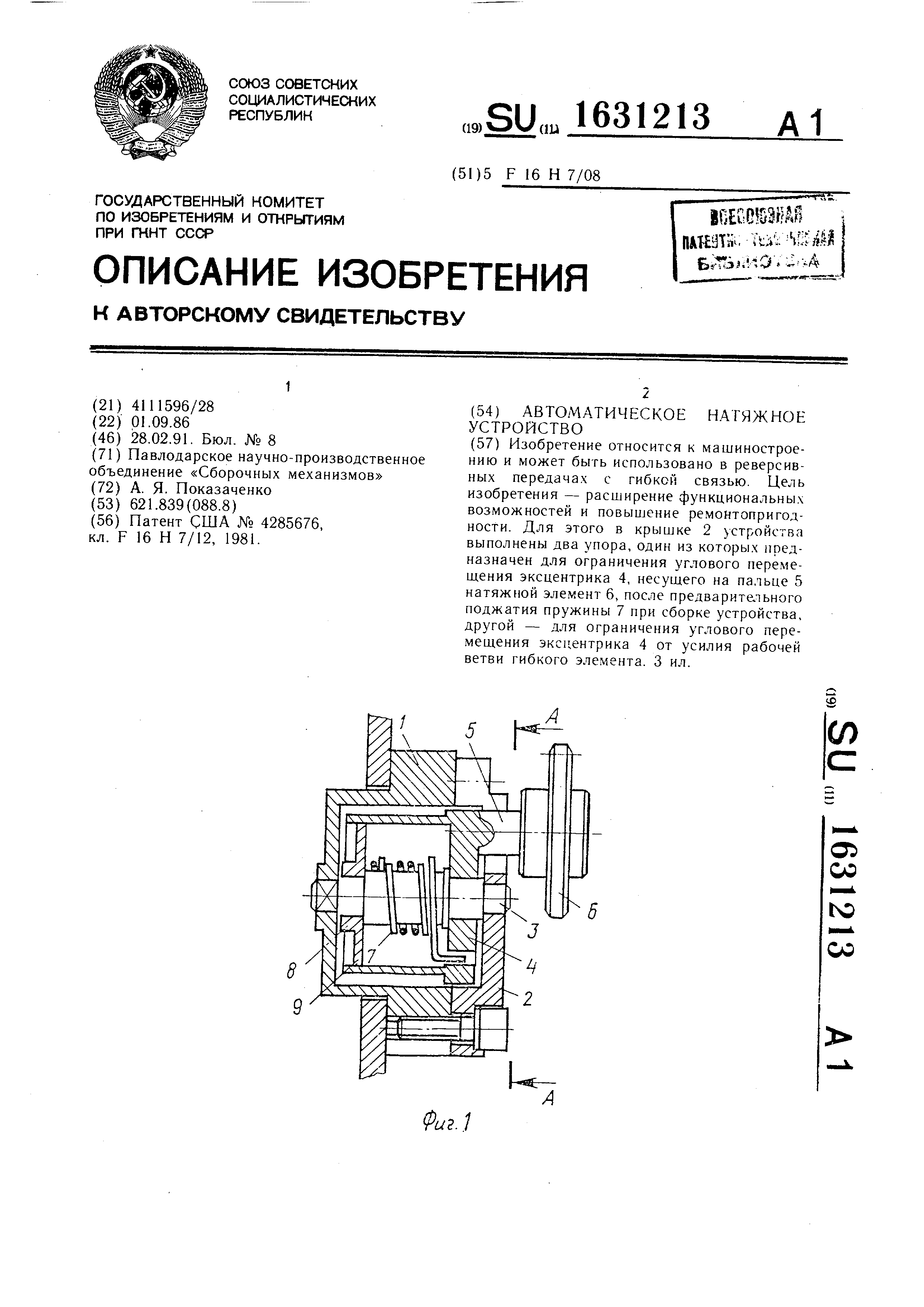
На фиг. 1 изображен общий вид устройства в разрезе; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - пример использования устройства в передачах с гибкой связью с изменяющимся межцентровым расстоянием .
Автоматическое натяжное устройство содержит корпус 1, крышку 2, в которых неподвижно установлена ось 3. Крышка 2 неподвижно закреплена на корпусе 1. На оси 3 свободно установлен эксцентрик 4, выполненный в виде стакана с эксцентрично расположенным пальцем 5, на котором свободно установлен натяжной элемент 6. Эксцентрик 4 связан с неподвижной осью 3 пружиной 7 кручения (может быть и спиральная пружина из полосовой стали), закрытой заглушкой 8 с фиксацией стопорным кольцом 9.
Крышка 2 является элементом фиксации эксцентрика. Крышка 2 имеет два упора 10 и 11, упор 10 ограничивает угловое перемещение эксцентрика 4 после предварительного поджатия пружины 7 при сборке, а упор 11 ограничивает угловое перемещение эксцентрика 4 от усилия рабочей ветви гибкого элемента.
На кинематической схеме (фиг. 3) условно показаны ведущая звездочка 12, ведомая звездочка 13, два нижних натяжных элемента 6 и два верхних натяжных элемента 6, т. е. в данной схеме показана передача с гибким органом с использованием, например четырех натяжных элементов 6. Препятствие, например стена, ветвь приемного конвейера и т. д., обозначено поз. 14.
Устройство работает следующим образом .
При вращении ведущей звездочки 12 по часовой стрелке (фиг. 3) верхняя ветвь передачи , являясь рабочей, поворачивает эксцентрик 4 с натяжным элементом 6, преодолевая сопротивление пружины 7 (упругая сила пружины 7 должна быть меньше усилия, создаваемого рабочей ветвью передачи), до соприкосновения эксцентрично посаженного пальца 5 с упором 11 и удерживает эксцентрик в этом положении, как бы фиксируя его. Верхние натяжные элементы 6 с пальцами 5, прижатые к упору 11, становятся неподвижными и вы-полняют роль отклоняющих блоков. Верхние натяжные эле0 менты 6, находясь на холостой ветви, автоматически натягивают ее упругой силой своих пружин. При изменении в процессе работы межцентрового расстояния, когда ведомая (и/или ведущая) звездочка перемещается вверх, разница компенсируется нижними натяжными элементами 6 за счет дополнительного углового перемещения эксцентрика 4, а при перемещении звездочки вниз - под действием упругой силы пружины 7. Расстояние между упорами 10 и 11 вы0 бирается из расчета увеличения межцентрового расстояния и износа цепи в процессе эксплуатации.
С изменением направления вращения ведущей звездочки 12 (пунктирная стрелка
5 на фиг. 3) в реверсивных передачах роль верхних и нижних натяжных элементов меняется. В этом случае нижняя ветвь передачи становится рабочей, а верхняя холостой , и, следовательно, нижние натяжные элементы превращаются в неподвижные от0 клоняющие блоки, а верхние натяжные элементы осуществляют автоматическое натяжение холостой ветви передачи и компенсируют изменение межцентрового расстояния.
Формула изобретения
Автоматическое натяжное устройство, содержащее корпус, неподвижно связанную с ним ось, установленный на последней с возможностью поворота и подпружиненный к
корпусу эксцентрик, несущий палец с установленным на нем натяжным элементом, и элемент фиксации эксцентрика, отличающееся тем, что, с целью расширения функциональных возможностей и повышения ремонтопригодности , элемент фиксации имеет
Два упора для взаимодействия с пальцем , а эксцентрик - заглушку, свободно установленную на оси.
Реферат
Изобретение относится к машиностроению и может быть использовано в реверсивных передачах с гибкой связью Цель изобретения - расширение функциональных возможностей и повышение ремонтопригодности . Для этого в крышке 2 устройства выполнены два упора, один из которых предназначен для ограничения углового перемещения эксцентрика 4, несущего на пальце 5 натяжной элемент 6, после предварительного поджатия пружины 7 при сборке устройства, другой - для ограничения углового перемещения эксцентрика 4 от усилия рабочей ветви гибкого элемента. 3 ил.
Формула
Комментарии