Распознавание занятости сиденья с помощью камеры - RU173633U1
Код документа: RU173633U1
Чертежи





Описание
Настоящее решение относится к устройству для распознавания занятости сиденья с помощью камеры.
Особенно в области пассажирских перевозок представляет интерес распознавание занятости сиденья. В автомобильной промышленности для этой цели, как правило, в сиденья встраиваются датчики, которые при нагрузке на сиденье распознают его как занятое. Срок службы используемых для этого датчиков ограничен, ввиду их механической нагрузки, приблизительно 50000 случаями нагружения. Для пассажирских индивидуальных перевозок этот срок службы может быть достаточным. Что касается общественного транспорта, в частности для железнодорожного транспорта, он является недостаточным. При предполагаемом сроке службы сиденья, равном 10 годам, для этого потребуется срок службы для одного миллиона случаев нагружения.
Кроме того, из автомобильной области известны решения, основанные на применении камер, которые предусматривают отдельную камеру для каждого сиденья, и при изменении изображения, регистрируемого соответствующей камерой, распознают занятость для соответствующего сиденья. Однако в сложных средах, таких как железнодорожные перевозки с перемещениями пассажиров во время поездки, помещением предметов багажа на сиденья и т.п., эти решения подвержены ошибкам и сопряжены с затратами в реализации.
Исходя из этого, в основе настоящего решения лежит задача обеспечить надежное обнаружение занятости сидений, особенно в сложных средах.
Эта задача решается посредством долговечного устройства для распознавания занятости сиденья.
Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы.
Предложено устройство, в котором для обнаружения занятости сиденья обеспечивается камера, которая ориентирована таким образом, что она регистрирует по меньшей мере одну представляющую интерес область сиденья. С помощью устройства оценки в снятом камерой изображении идентифицируется представляющая интерес область, и положение представляющей интерес области сохраняется. В дальнейшем, из снятых камерой изображений посредством устройства оценки в сохраненном положении выбирается представляющая интерес область и сравнивается с по меньшей мере одним сохраненным шаблоном изображения. В зависимости от результата этого сравнения сиденье распознается как занятое.
Под представляющей интерес областью следует понимать область изображения, которая должна использоваться для оценки изображений. Это могут быть, например, определенные области сиденья. Предпочтительно, в качестве представляющей интерес области регистрируется головная область сиденья. Под головной областью следует понимать ту область сиденья, в которой обычно находится голова человека, сидящего на сиденье. Если сиденье имеет подголовник, то головная область этого сиденья предпочтительно может быть образована этим подголовником. Регистрация головной области в качестве представляющей интерес области предоставляет, помимо прочего, то преимущество, что в головной области реже располагают предметы багажа или одежды, чем в других областях сиденья.
Положение представляющей интерес области обозначает в данном случае положение соответственно рассматриваемой представляющей интерес области в пространстве или в случае постоянной ориентации камеры положение этой представляющей интерес области в общем изображении камеры.
Настоящее решение обеспечивает возможность надежного распознавания занятости сиденья в сложных средах. Камера также может быть использована для распознавания занятости нескольких сидений. Поэтому устройство может быть реализовано при невысоких затратах. Так как только представляющие интерес области оцениваются для распознавания занятости сидений, то нет необходимости, чтобы все сиденье было видно на изображениях, снятых камерой. Поэтому в пассажирских салонах транспортных средств могут встраиваться одна или более камер на потолке. Наряду с этим существует возможность использовать камеры, уже существующие для других целей в пассажирских салонах, для осуществления настоящего решения. По существу оптическое распознавание занятости работает, по сравнению с вышеописанными, размещаемыми в сиденьях и механически нагружаемыми датчиками, не подвергаясь износу и тем самым продолжительно надежным образом.
Идентифицированная представляющая интерес область сохраняется в виде шаблона изображения. Тогда в вышеописанном сравнении, выбранная представляющая интерес область сравнивается с этим шаблоном изображения. Если результатом этого сравнения является отклонение выбранной представляющей интерес области от шаблона изображения, то сиденье распознается как занятое.
Предпочтительно, в данном варианте осуществления выполняется проверка достоверности, прежде чем сиденье распознается как занятое. Таким образом, можно избежать ложных распознаваний занятости сиденья, особенно в сложных средах, которые, например, могут создаваться из-за того, что предмет багажа помещают на сиденье или предмет одежды вешают перед сиденьем.
В рамках проверки достоверности, предпочтительно сравнивают найденное в результате отклонение от шаблона изображения с параметризованным шаблоном помехи (возмущения). В качестве параметризованного шаблона помехи может быть использована, например, геометрическая форма, которая напоминает часть человеческого тела. В простейшем случае, в качестве параметризированного шаблона помехи может предусматриваться круг с границами изменяемого радиуса в качестве аппроксимирующего отображения головы человека. Сиденье определяется как занятое, когда параметризированный шаблон помехи за счет выбора параметров, лежащих внутри заданных границ параметров, может приводиться в перекрытие с отклонением по меньшей мере до заданной минимальной степени. В описанном примере круга с изменяемым радиусом это означает следующее: если может быть выбран радиус круга, с которым круг, представляющий шаблон помехи, достаточно точно может быть приведен в перекрытие с отклонением, то отклонение оценивается как голова человека, и сиденье распознается как занятое.
Предпочтительным образом, в качестве параметризированного шаблона помехи применяется эллипс с заданными границами параметров для его длины большой оси и его длины малой оси. Это уже обеспечивает возможность приемлемого приближения шаблона помехи к форме головы человека. Форма головы человека в принципе может, однако, аппроксимироваться со сколь угодно большим числом параметров, и, таким образом, число ложных распознаваний занятости сиденья можно дополнительно снизить. На практике использование параметризованной формы головы человека в качестве параметризованного шаблона помехи оказалось особенно оправданным, так как голова человека или по меньшей мере большая ее часть очень часто является неприкрытой.
В качестве альтернативы или дополнительно к описанному параметризированному шаблону помехи, отклонение с помощью устройства оценки может исследоваться на биометрические признаки головы человека. Сиденье тогда распознается как занятое, если заранее определенное минимальное количество биометрических признаков обнаруживается в отклонении. Таким образом, доля ложных распознаваний занятости сиденья другим путем или дополнительно может быть уменьшена. В качестве биометрических признаков подходят в принципе все распознаваемые признаки человеческого тела. Например, могут оцениваться количество глаз, количество ушей, расстояние между глазами, расстояние глаз-нос или другие признаки.
Если проверка достоверности указывает, что сиденье занято не человеком, а предметом багажа или одежды, то проводнику транспортного средства может быть отправлено сообщение о том, что сиденье занято не человеком, а другим предметом, если это в соответствующем случае применения полезно.
В одном варианте осуществления в качестве камеры используется инфракрасная камера. В качестве по меньшей мере одного сохраненного шаблона изображения предусмотрен по меньшей мере один шаблон теплового изображения головы человека. Сиденье распознается как занятое, если при выполненном с помощью устройства оценки сравнения в качестве результата в выбранной представляющей интерес области найдена структура, которая совпадает с по меньшей мере одним из по меньшей мере одного шаблона теплового изображения в заданной минимальной степени. Этот вариант осуществления предоставляет преимущество, состоящее в том, что занятость сиденья может надежно распознаваться независимо от ситуации освещения. Кроме того, люди, на основе их теплового излучения, могут распознаваться проще и, таким образом, экономичнее, чем с камерами, работающими в видимом диапазоне длин волн. Предпочтительно используется пассивная инфракрасная камера.
Предпочтительно, маркировка, находящаяся в идентифицируемой представляющей интерес области, идентифицирующая сиденье, считывается, и считанная информация сохраняется. Особенно предпочтительным образом это осуществляется, прежде чем с помощью устройства оценки выбирается представляющая интерес область и сравнивается с сохраненным эталоном изображения. Считывание упомянутой маркировки позволяет идентифицировать сиденье, регистрируемое камерой. Если камера регистрирует представляющие интерес области нескольких сидений, то соответствующая представляющая интерес область может быть ассоциирована с определенным сиденьем. Состояния занятости, которые распознаются в различных представляющих интерес областях, могут тогда соотноситься с определенными сиденьями. Состояние занятости сиденья, таким образом, может для каждого идентифицированного сиденья, возможно, вместе с его положением внутри транспортного средства, сохраняться и/или предоставляться для дальнейшей обработки. Маркировка может быть реализована в виде штрих-кода или двумерного кода. Такие коды надежно считываются. К тому же они могут быть удобным образом напечатаны на сиденье или приклеены.
В предпочтительном варианте, считанная информация или считанные информации нескольких мест сравниваются с сохраненными основными данными. Эти сохраненные основные данные могут представлять собой, например, число сидений в регистрируемом камерой пространстве или идентификационные данные этих сидений. Если это сравнение выявляет различие между основными данными и сохраненными, считанными информациями, то может выдаваться предупредительное сообщение, и/или считывание маркировок, идентифицирующих сиденье или сиденья, повторяется.
Если сиденье распознано как занятое, то предпочтительным образом выполняется одно или более ʺустранений дребезговʺ, чтобы не допустить того, что статус занятости сиденья будет неправильно устранен, например, когда пассажир временно встает, посещает туалет или бистро. Поэтому предпочтительно, для сиденья, ранее распознанного как занятое, для которого устройство оценки не распознает отклонения представляющей интерес области от шаблона изображения, состояние занятости удаляется только по истечении заданного периода времени, при условии, что в течение этого периода, сиденье не было снова распознано как занятое. При этом заданный период времени для различных состояний движения транспортного средства, в котором находится сиденье, предпочтительно выбирается по-разному. Если транспортное средство движется, например, на открытом участке пути, то задается более длительный период, чем в случае, когда транспортное средство останавливается на остановке.
В качестве альтернативы или дополнительно, распознавание занятости сиденья в состояниях движения, о которых известно, что происходит много перемещений людей, - например, на остановках с перемещениями для входа и выхода - отключается или игнорируется. Таким образом, также можно уменьшить долю неправильных распознаваний занятости сидений.
В предпочтительном варианте, камера ориентирована таким образом, что она для нескольких сидений регистрирует соответствующую ассоциированную представляющую интерес область. Кроме того, по меньшей мере для части, предпочтительно для каждого из этих сидений, выполняется соответствующее распознавание занятости. Таким образом, с помощью одной камеры и, таким образом, при низких аппаратных затратах, могут распознаваться состояния занятости нескольких сидений, которые находятся в области регистрации этой камеры.
В качестве альтернативы или дополнительно, камера поочередно может быть ориентирована так, что она поочередно регистрирует представляющие интерес области различных сидений или различных групп сидений. Если камера регистрирует при каждой ориентации только одно сиденье, то таким образом могут распознаваться состояния занятости различных сидений. Напротив, если камера при различных ориентациях регистрирует, соответственно, различные группы сидений, то таким образом могут распознаваться состояния занятости сидений этих групп сидений при низких аппаратных затратах. При этом распознавание состояний занятости отдельных сидений группы сидений осуществляется, как описано выше, тем, что для различных сидений этой группы сидений регистрируется соответствующая представляющая интерес область, и для каждого из этих сидений выполняется соответствующее распознавание занятости.
Настоящее устройство имеет, наряду с камерой, устройство оценки, которое сконфигурировано, чтобы идентифицировать представляющие интерес области в зарегистрированных камерой изображениях камеры на основе распознавания образов и сохранять вместе с их положением. Устройство оценки также сконфигурировано, чтобы сравнивать представляющие интерес области из зарегистрированных камерой изображений с сохраненными шаблонами изображений. При этом термин ʺположение представляющей интерес областиʺ следует понимать в указанном выше смысле.
Так как описанное устройство, в отличие от вышеописанных механически нагружаемых датчиков занятости сидений, не подвергается никаким механическим нагрузкам, то оно по сравнению с ними гораздо более долговечно и устойчиво к износу.
Устройство предпочтительно сконфигурировано, чтобы идентифицировать в изображении, полученном с помощью камеры, множество представляющих интерес областей и сохранять их положения.
Устройство оценки предпочтительным образом сконфигурировано так, чтобы сохранять идентифицированные представляющие интерес области, при сравнении определять отклонения и сравнивать эти определенные отклонения с параметризованным шаблоном помехи. Это позволяет, как описано выше, более надежно распознавать состояние занятости сиденья.
Дальнейшее снижение ложных распознаваний занятости сиденья обеспечивается применением устройства оценки, которое сконфигурировано, чтобы сохранять идентифицированные представляющие интерес области, при сравнении определять отклонения и исследовать эти определенные отклонения на биометрические признаки головы человека.
В альтернативном варианте выполнения камера выполнена в виде инфракрасной камеры, предпочтительно как пассивная инфракрасная камера. Кроме того, устройство оценки сконфигурировано, чтобы при сравнении представляющих интерес областей с сохраненными шаблонами изображения идентифицировать в представляющих интерес областях структуру, которая совпадает с одним из сохраненных шаблонов изображения по меньшей мере до заданной минимальной степени. В этом варианте осуществления устройства, представляющие интерес области из изображений, снятых инфракрасной камерой, могут оцениваться.
Предпочтительно, устройство оценки сконфигурировано, чтобы идентифицировать и считывать маркировки сиденья, содержащиеся в снятых камерой изображениях. Эти маркировки особенно предпочтительно являются штрих-кодами или двумерными кодами. Они обеспечивают возможность надежного считывания информаций с использованием испытанных методов и устройств. Распознанное состояние занятости может, таким образом, однозначно соотноситься с определенным сиденьем, и оно может быть локализовано. Если применяется инфракрасная камера, то маркировки рациональным образом выполнены нагреваемыми. В частности, штрихи штрих-кода могут выполняться нагреваемыми, так что отдельные штрихи распознаются в тепловом изображении.
В зависимости от применения может быть предпочтительным предусмотреть устройство передачи, с помощью которого данные, считанные из маркировок одного или нескольких сидений, а также их состояние занятости могут передаваться дальше. Состояния занятости сидений могут, таким образом, предоставляться для дальнейшей обработки.
Камера предпочтительно снабжена детектором и оптикой, которая приспособлена, чтобы иметь возможность детектировать сигналы флуоресценции или фосфоресценции флуоресцирующей или фосфоресцирующей маркировки. Это дает возможность считывать маркировки, нанесенные на сиденья, также в сложных условиях освещения, при условии, что предусматриваются флуоресцирующие или фосфоресцирующие маркировки.
Вышеописанные свойства, признаки и преимущества настоящего решения станут более очевидными и четко понятными в связи с нижеследующим описанием вариантов осуществления, которые объясняются в связи с чертежами. Отвечая поставленным целям, соответствующие идентичные элементы на чертежах обозначены одинаковыми ссылочными позициями. Настоящее решение не ограничивается вариантами осуществления, показанными на чертежах, как и по отношению к функциональным признакам. Приведенное выше описание, а также последующее описание чертежей содержат многочисленные признаки, которые в зависимых пунктах формулы отображены частично объединенными. Эти признаки, как и все остальные, указанные выше и раскрытые в последующем описании чертежей, специалист в данной области техники также будет рассматривать отдельно и в других целесообразных комбинациях. В частности, эти признаки могут, соответственно, в отдельности и в любой подходящей комбинации комбинироваться с предлагаемым устройством.
На чертежах показано:
Фиг. 1 - схема первого примера выполнения соответствующего распознавания занятости,
Фиг. 2 - сиденье, снабженное маркировкой,
Фиг. 3 - представляющая интерес область сиденья согласно фиг. 2,
Фиг. 4 - представляющая интерес область согласно фиг. 3, в случае занятости сиденья,
Фиг. 5 - схематичное представление сравнения отклонения от шаблона изображения с параметризированным шаблоном помехи,
Фиг. 6 - принципиальная схема второго примера выполнения соответствующего распознавания занятости,
Фиг. 7 - сиденье согласно фиг. 2 с положением представляющей интерес области,
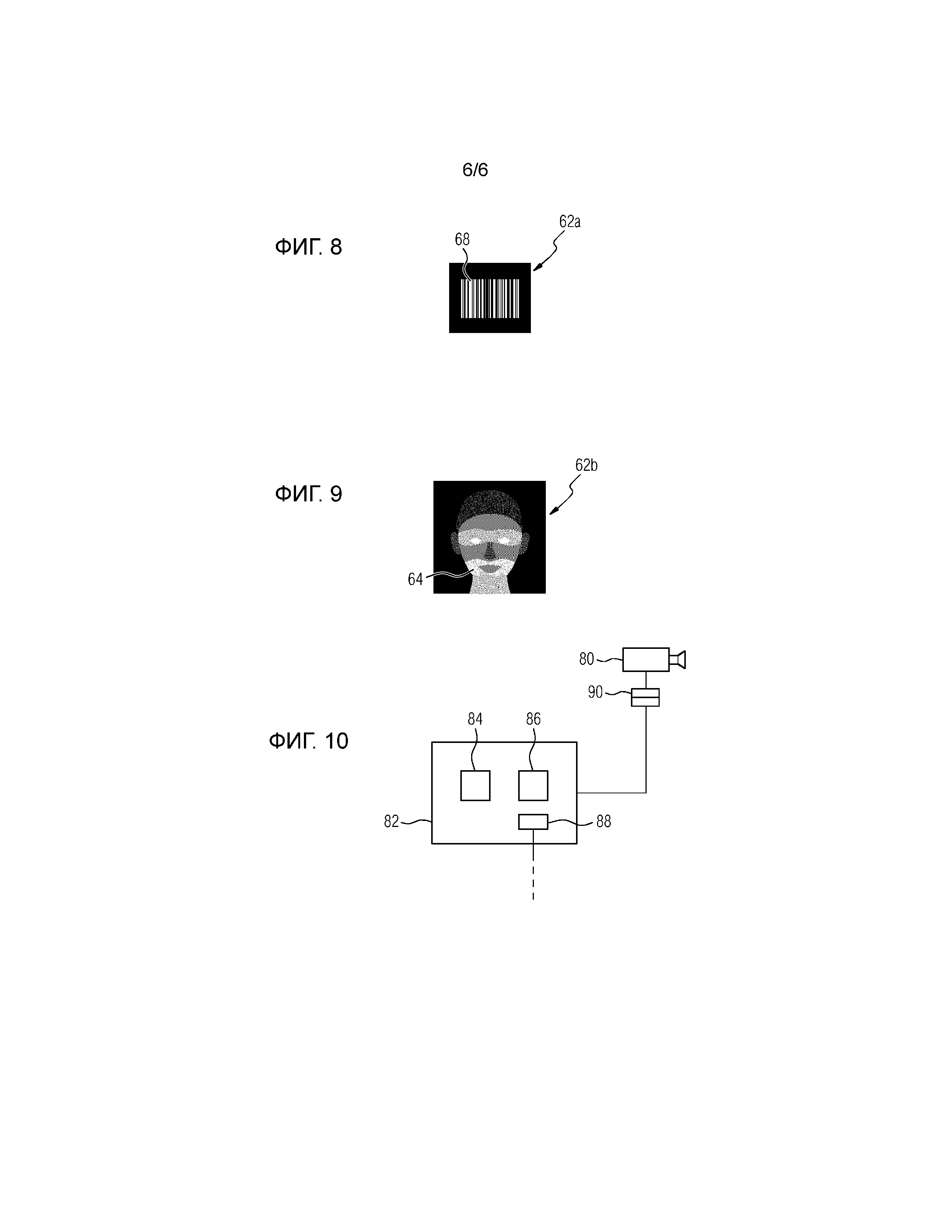
Фиг. 8 - представляющая интерес область сиденья согласно фиг. 7,
Фиг. 9 - представляющая интерес область согласно фиг. 8 в случае занятости сиденья,
Фиг. 10 - схематичное изображение примера выполнения устройства.
Фиг. 1 показывает принципиальную схему первого примера для распознавания занятости сиденья. Он подробно объясняется ниже со ссылками на фиг. 2-5. В соответствии с примером выполнения, показанным на фиг. 1, сначала камера ориентируется, 10, таким образом, что она регистрирует по меньшей мере одну представляющую интерес область сиденья 30. Затем с ориентированной камерой снимается, 10, изображение инициализации. В дальнейшем ходе процесса посредством устройства оценки на изображении инициализации идентифицируется представляющая интерес область, которая вместе с ее положением сохраняется, 12, в качестве шаблона изображения. В примере сиденья 30 согласно фиг. 2 в качестве представляющей интерес области выбрана область головы 32а, которая в представлении на фиг. 2 ограничена пунктиром. Эта область головы 32а показана на фиг. 3 еще раз в отдельности и образована по существу подголовником 36 сиденья 30. В зависимости от того, насколько точно область головы 32а может быть идентифицирована, она может еще охватывать части поручня 34 сиденья 30. Область головы 32а согласно фиг. 3 представляет, следовательно, одновременно по меньшей мере один, и в варианте осуществления согласно фиг.1 единственный, шаблон изображения 40.
Область головы 32а или подголовник 36 имеет маркировку, которая выполнена в виде штрих-кода 38. Предпочтительно, она может представлять собой флуоресцирующий или фосфоресцирующий штрих-код. Эта идентифицирующая сиденье 30 маркировка затем считывается, 13, и считанная информация сохраняется, 13.
Кроме того, посредством камеры регистрируется последующее изображение, и в сохраненном положении области головы 32а в этом последующем изображении выбирается, 14, представляющая интерес область. В примере сиденья 30 согласно фиг. 2, полученная из этого последующего изображения представляющая интерес область снова показывает область головы 32b. Она показана на фиг. 4. Как можно видеть на фиг. 4, на сиденье 30 сел человек, голова которого размещена в области головы 32b. Таким образом, эта голова представляет отклонение 41 относительно области головы 32а.
В дальнейшем ходе процесса, представляющая интерес область последующего изображения сравнивается, 16, с сохраненным шаблоном изображения. В примере сиденья 30 согласно фиг. 2 это означает сравнение области головы 32b согласно фиг. 4 с представляющей шаблон 40 изображения областью головы 32а согласно фиг. 3. При этом распознается отклонение 41. Чтобы убедиться в том, что это отклонение 41 на самом деле вызвано занятостью сиденья 30, а не положенными на сиденье 30 предметами, пример выполнения согласно фиг. 1 предусматривает затем проверку достоверности, 17. Если при этом отклонение 41 считается достоверным для занятости сиденья, то сиденье 30 определяется как занятое, 18. В противном случае сиденье 30 считается свободным, 20.
Фиг. 5 иллюстрирует проверку достоверности путем сравнения отклонения 41 с параметризованным шаблоном помехи. При этом в качестве параметризованного шаблона помехи применяется эллиптический шаблон 42 помехи, причем длина 46 большой оси и длина 44 малой оси представляют параметры этого эллиптического шаблона 42 помехи. Для этих параметров заданы пределы параметров, внутри которых варьируются длина 44 малой оси и длина 46 большой оси, чтобы эллиптический шаблон помехи наилучшим образом привести в перекрытие с отклонением 41. В представлении на фиг. 5 это уже осуществлено. Как можно видеть, эллиптический шаблон 42 помехи мог быть при этом в значительной степени приведен в перекрытие с отклонением 41. В варианте осуществления настоящего решения, это может рассматриваться как уже достаточное для успешного завершения проверки достоверности, 17. В описываемом примере выполнения, однако, для дальнейшего снижения ложных распознаваний занятости сиденья отклонение 41 исследуется на биометрические признаки человеческой головы. В этой части проверки достоверности, 17, на основе известных тестовых программ проверяется, имеет ли отклонение 41 по меньшей мере один глаз 48 и нос 50. Однако могут быть использованы и другие биометрические признаки. В примере согласно фиг. 5 эти биометрические признаки присутствуют, так что сиденье распознается как занятое, 18.
Вариант выполнения согласно фиг. 1 предусматривает, что для сиденья, ранее распознанного как занятое, для которого при сравнении, 16, представляющей интерес области последующего изображения с шаблоном изображения не распознано никакого отклонения, статус занятости отменяется только по истечении заданного периода времени. Если это минимальное время для распознавания свободного сиденья достигнуто, то сиденье распознается как свободное, 20. Если это минимальное время для распознавания свободного сиденья не достигнуто, то состояние занятости сохраняется, и в очередном последующем изображении выбирается, 14, представляющая интерес область, которая сравнивается, 16, с шаблоном изображения. Заданный период времени и, следовательно, минимальное время для распознавания свободного сиденья, как описано выше, в зависимости от состояния движения транспортного средства, в котором установлено сиденье 30, варьируются.
Для простоты понимания, пример выполнения согласно фиг. 1-5 был описан на основе одного снимаемого камерой сиденья 30. Однако если камера ориентирована таким образом, что она для нескольких сидений регистрирует соответственно соотнесенную представляющую интерес область, то дальнейшие этапы распознавания занятости могут выполняться для каждого из этих сидений и соответственно ассоциированных представляющих интерес областей, и тогда распознается занятость каждого из этих сидений.
Фиг. 6 показывает принципиальное представление примера выполнения соответствующего распознавания занятости. Он поясняется ниже с помощью фиг. 7-9. Как в примере выполнения согласно фиг. 1, сначала камера ориентируется, 10, таким образом, что она регистрирует по меньшей мере одну представляющую интерес область 30 сиденья. Затем, камерой, которая в примере выполнения согласно фиг. 6 является пассивной инфракрасной камерой, снимается, 10, изображение инициализации. В дальнейшем с помощью устройства оценки в изображении инициализации идентифицируется представляющая интерес область, и ее положение сохраняется, 52.
В примере выполнения согласно фиг. 6, в качестве представляющей интерес области выбирается область, которая окружает нагреваемый штрих-код 68. Положение 61 этой представляющей интерес области указано на фиг. 7, которая представляет не инфракрасный снимок сиденья 30, а обычное отображение этого сиденья 30, с помощью пунктирной линии. Фиг. 8 показывает идентифицированную в изображении инициализации представляющую интерес область 62а. Так как изображение инициализации представляет собой тепловое изображение инфракрасной камеры, нагретый штрих-код 68 в представлении согласно фиг. 8 выглядит светлым, а холодная окрестность - черной.
В дальнейшем, нагреваемый штрих-код 38, который представляет маркировку сиденья 30, считывается, и считанная, 53, информация сохраняется, 53.
Затем с помощью камеры снимается последующее изображение, и в сохраненном положении представляющей интерес области 62а в этом последующем изображении выбирается, 54, представляющая интерес область. Эта выбранная представляющая интерес область 62b представлена на фиг. 9. Как можно видеть на фиг. 9, перед съемкой последующего изображения человек снова сел на сиденье 30, так что в представляющей интерес области 62b можно распознать тепловое изображение головы человека.
Затем, показанная на фиг. 9 представляющая интерес область 62b сравнивается, 56, с различными сохраненными шаблонами теплового изображения головы человека. Это сравнение, 56, осуществляется с помощью устройства оценки. Так как показанная на фиг.9 представляющая интерес область 62b из последующего изображения может быть сведена к голове человека, в рамках этого сравнения, 56, в представляющей интерес области 62b найдена структура 64, которая совпадает с одним из сохраненных шаблонов теплового изображения головы человека в требуемой минимальной степени. Вследствие этого сиденье распознается, 58, как занятое. Если бы, напротив, структура, в достаточной степени совпадающая с шаблоном теплового изображения, не была найдена, то сиденье распознавалось бы, 60, как свободное.
Перед распознаванием, 60, сиденья как свободного, аналогично тому, как в примере выполнения согласно фиг. 1, проверяется, было ли сиденье ранее идентифицировано как занятое. Если это имело место, и при сравнении, 56, представляющей интерес области последующего изображения с шаблонами теплового изображения не найдена совпадающая структура, то статус занятости сиденья 30 отменяется только по истечении заранее определенного периода времени. Если это минимальное время для распознавания незанятости достигнуто, то сиденье распознается, 60, как свободное. Если, напротив, это минимальное время для распознавания незанятости не достигнуто, статус занятости сохраняется, и в очередном последующем изображении выбирается содержащаяся в нем представляющая интерес область 54 и сравнивается, 56, с шаблонами теплового изображения. Заданный период времени и, таким образом, минимальное время для распознавания незанятости может, как описано выше, варьироваться в зависимости от состояния движения транспортного средства, в котором находится сиденье 30. Таким образом, может предотвращаться то, что статус занятости сиденья будет ложным образом отменен, например, из-за временного вставания пассажира или вследствие посещения туалета.
Для простоты понимания, пример выполнения согласно фиг. 6-9 был снова описан на основе одного регистрируемого камерой сиденья 30. Однако если камера ориентирована так, что она регистрирует для нескольких сидений соответственно ассоциированную представляющую интерес область, то последующие этапы распознавания занятости согласно представлению на фиг. 6 могут выполняться для каждого из этих сидений и соответствующей ассоциированной представляющей интерес области, и, таким образом, распознается занятость каждого из этих сидений.
Фиг. 10 показывает пример осуществления устройства, посредством которого может выполняться соответствующее распознавание занятости сидения. Это устройство включает в себя, в дополнение к камере 80, устройство 82 оценки. Устройство 82 оценки сконфигурировано, чтобы идентифицировать в снимаемых камерой 80 изображениях представляющие интерес области на основе известных как таковые методов распознавания образов и сохранять вместе с положением представляющих интерес областей. Кроме того, устройство 82 оценки сконфигурировано, чтобы сравнивать представляющие интерес области с шаблонами изображения и определять отклонения. Для этих целей, устройство 82 оценки содержит устройство 84 памяти и вычислительное устройство 86.
Устройство 82 оценки, кроме того, сконфигурировано, чтобы сравнивать определенное отклонение 41 с параметризованным, эллиптическим шаблоном 42 помехи и при этом приводить шаблон помехи в перекрытие с отклонением, насколько это возможно.
Кроме того, устройство 82 оценки сконфигурировано, чтобы исследовать отклонение по меньшей мере на биометрические признаки наличия по меньшей мере одного глаза и носа. Кроме того, устройство 82 оценки сконфигурировано, чтобы идентифицировать и считывать штрих-код 38 на изображениях, снятых камерой 80, а также сохранять считанную информацию.
Устройство 82 оценки, показанное на фиг.6, также включает в себя устройство 88 передачи, с помощью которого данные, считанные из штрих-кода 38 сиденья 30, а также его состояние занятости могут быть переданы дальше, например, на вышестоящее устройство обработки данных транспортного средства.
Если камера 80 выполнена как инфракрасная камера, и устройство 82 оценки сконфигурировано, чтобы при сравнении представляющих интерес областей из снятых камерой 80 изображений с сохраненными шаблонами изображения идентифицировать в представляющих интерес областях структуру, которая совпадает с одним из сохраненных шаблонов изображения по меньшей мере в заданной минимальной степени, то показанное на фиг. 10 устройство может применяться для осуществления распознавания занятости сидения согласно фиг. 6.
Камера 80 и устройство 82 оценки выполнены с возможностью одновременной регистрации и обработки представляющих интерес областей множества сидений. Следовательно, при относительно низких аппаратных затратах могут распознаваться состояния занятости множества сидений. Кроме того, камера 80 с помощью устройства 90 позиционирования установлена с возможностью изменяемого поворота и наклона, так что она попеременно может быть ориентирована так, что она поочередно регистрирует представляющие интерес области различных сидений или групп сидений. Таким образом, могут распознаваться состояния занятости большего количества сидений при низких аппаратных затратах.
Хотя настоящее решение было детально проиллюстрировано и описано посредством предпочтительных примеров выполнения, оно не ограничено раскрытыми примерами, и другие их варианты могут быть получены специалистом на этой основе без отклонения от объема охраны.
Реферат
Настоящее решение относится к устройству для распознавания занятости сиденья с помощью камеры, в котором для достижения постоянно надежного распознавания занятости сиденья предлагается ориентировать (10) камеру (80) таким образом, что она регистрирует по меньшей мере одну представляющую интерес область (32а; 62а) сиденья (30); с помощью устройства (82) оценки в изображении, снятом камерой (80), идентифицировать представляющую интерес область (32а; 62а) и сохранять (12; 52) положение представляющей интерес области (32а; 62а); посредством устройства (82) оценки выбирать (14; 54) в снятых затем камерой (80) изображениях в сохраненном положении представляющую интерес область (32b; 62b) и сравнивать (16; 56) с по меньшей мере одним сохраненным шаблоном (40) изображения; и в зависимости от результата этого сравнения распознавать (18; 58) сиденье (30) как занятое.
Комментарии