Устройство помощи в предотвращении столкновений для транспортного средства - RU2666071C2
Код документа: RU2666071C2
Чертежи








Описание
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к технологии помощи в предотвращении столкновений для транспортного средства, такого как автомобиль, а более конкретно, к устройству для предотвращения столкновения между движущимся транспортным средством и животным.
2. Описание предшествующего уровня техники
[0002] В области техники на основе технологии помощи при вождении для транспортного средства, такого как автомобиль, предложены различные конфигурации для системы, которая отслеживает область впереди движущегося транспортного средства с использованием бортовой видеокамеры или радарного датчика, и когда обнаруживается такой объект, как другие транспортные средства, человек или животное, прогнозирует вероятность столкновения с объектом, чтобы помогать водителю в предотвращении столкновения с объектом. Например, публикация заявки на патент (Япония) номер 2010-020401 (JP 2010-020401 А) и публикация заявки на патент (Япония) номер 2010-108507 (JP 2010-108507 А) раскрывают конфигурацию, которая определяет то, является либо нет объект, обнаруженный в изображении, захваченном посредством бортовой камеры, человеком или четвероногим животным. Если определенное изображение является изображением четвероногого животного, конфигурация оценивает область присутствия четвероногого животного после перемещения четвероногого животного, с учетом того, что четвероногое животное, скорее всего, должно перемещаться в направлении своей головы. Затем конфигурация определяет то, перекрывается или нет область присутствия оцененного четвероногого животного с будущей областью присутствия транспортного средства, чтобы обнаруживать вероятность столкновения.
Публикация заявки на патент (Япония) номер 2009-301283 (JP 2009-301283 А) предлагает конфигурацию, которая, когда имеется вероятность столкновения с объектом, изменяет частоту и время, в которое уведомляется вероятность столкновения, между случаем, в котором объект является человеком, и случаем, в котором объект является четвероногим животным. Помимо этого, для способа для распознавания того, является или нет объект, обнаруженный в захваченном изображении, четвероногим животным, публикация заявки на патент (Япония) номер 2010-113550 (JP 2010-113550 А), публикация заявки на патент (Япония) номер 2010-092429 (JP 2010-092429 А) и публикация заявки на патент (Япония) номер 2010-009372 (JP 2010-009372 А) предлагают конфигурацию, которая определяет то, является или нет объект четвероногим животным, посредством определения того, изменяется или нет периодически угол вектора, указывающего позицию изображения объекта (публикация заявки на патент (Япония) номер 2010-113550 (JP 2010-113550 А)), посредством определения того, изменяется или нет элемент изображения, соответствующий движению ног, в конфигурации нижней части изображения объекта (публикация заявки на патент (Япония) номер 2010-092429 (JP 2010-092429 А)), либо посредством определения того, имеет или нет изображение объекта элемент изображения, соответствующий хребту и четырем ногам четвероногого животного (публикация заявки на патент (Япония) номер 2010-009372 (JP 2010-009372 А)).
[0003] В общем, животные (например, домашний скот, к примеру, лошадь, вол и овца, и дикие животные, к примеру, олень, дикий козел, медведь, кенгуру), которые могут выходить на проезжую дорогу транспортного средства, отличаются по шаблону поведения или характеристикам поведения согласно типу. Например, поведение животного, когда транспортное средство приближается к животному, зависит от типа животного: животное убегает (бежит) от транспортного средства, замирает в том месте, в котором находится животное, приближается к транспортному средству или выбегает на проезжую дорогу. Скорость перемещения и направление перемещения животного также отличаются в зависимости от типов животных. Следовательно, когда животное обнаруживается в изображении проезжей дороги в направлении движения транспортного средства или в изображении его окрестности, тип животного должен идентифицироваться; в противном случае, затруднительно оценивать то, куда животное должно перемещаться после того, как оно обнаруживается, т.е. позицию, в которой животное должно находиться, или область, в которой животное с большой вероятностью должно находиться в будущем. Помимо этого, может становиться затруднительным точно определять вероятность столкновения между транспортным средством и животным. С этой точки зрения, если объект является животным, и если тип животного не идентифицируется, и тенденция поведения не может прогнозироваться, неизвестно, в каком направлении и на какой скорости должно перемещаться изображение животного в захваченном изображении. Следовательно, при прогнозировании будущей области присутствия животного, может становиться необходимым понимать тенденцию поведения животного или выполнять анализ изображений относительно большой области в изображении для отслеживания изображения животного. Тем не менее, поскольку информация изображений является четырехмерной информацией, имеющей элементы (значения двумерных координат, яркость и время), вычислительная нагрузка и время обработки значительно возрастает по мере того, как диапазон анализа области изображения становится большим. Это означает то, что быстрая реализация определения вероятности столкновения и помощи в предотвращении столкновений требует более высокопроизводительного устройства обработки вычисления и запоминающего устройства, что приводит к возрастанию затрат.
[0004] Помимо этого, когда характеристики поведения животных отличаются в зависимости от типов животных, эффективная помощь для предотвращения столкновений также отличается в зависимости от типов животных. Когда предупреждение посредством звука и света выдается животному, обнаруженному впереди транспортного средства, реакция отличается в зависимости от типов животных; некоторые животные являются очень чувствительными к предупреждению и отдаляются от транспортного средства, и некоторые другие животные вообще не реагируют на предупреждение и выходят на проезжую дорогу с минимальным изменением поведения, или без изменения поведения. В частности, в первом случае, столкновения можно избегать посредством выдачи предупреждения посредством звука или света без необходимости применять тормоз или выполнять операцию руления для транспортного средства. Во втором случае, столкновения можно избегать посредством применения тормоза или посредством выполнения операции руления для транспортного средства. С другой стороны, когда столкновения можно избегать только посредством выдачи предупреждения, помощь при вождении посредством применения тормоза или посредством выполнения операции руления для транспортного средства не требуется; аналогично, когда столкновения можно избегать посредством применения тормоза или выполнения операции руления для транспортного средства, формирование предупреждения не требуется. Следовательно, когда животное обнаруживается в качестве объекта в изображении проезжей дороги в направлении движения транспортного средства или в изображении его окрестности, предпочтительно, если помощь для предотвращения столкновений предоставляется в более подходящем режиме согласно типу животного.
Сущность изобретения
[0005] Настоящее изобретение предоставляет устройство помощи в предотвращении столкновений для транспортного средства, которое идентифицирует тип животного, когда животное обнаруживается на проезжей дороге транспортного средства или в его окрестности. После этого, устройство помощи в предотвращении столкновений более точно оценивает будущую область присутствия животного на основе характеристик поведения типа и определяет вероятность столкновения.
[0006] Согласно первому аспекту настоящего изобретения, устройство помощи в предотвращении столкновений для транспортного средства включает в себя:
- блок захвата, выполненный с возможностью получать изображение около транспортного средства;
- блок обнаружения изображений животных, выполненный с возможностью обнаруживать присутствие или отсутствие изображения животного в изображении;
- блок определения типов животных, выполненный с возможностью определять тип животного, когда изображение животного обнаруживается в изображении;
- блок прогнозирования области присутствия животных, выполненный с возможностью прогнозировать будущую область присутствия животного на основе значений индекса характеристик поведения, представляющих характеристики поведения определенного типа животного;
- блок определения вероятности столкновения, выполненный с возможностью определять вероятность столкновения животного с транспортным средством на основе результата прогнозирования будущей области присутствия животного; и
- блок выполнения обработки помощи, выполненный с возможностью осуществлять обработку помощи для предотвращения столкновений, когда определяется то, что имеется вероятность столкновения животного с транспортным средством.
[0007] В вышеуказанной конфигурации, тип "животного" может быть лошадью, волом, овцой, оленем, диким козлом, медведем, кенгуру или любым другим четвероногим животным. "Характеристики поведения определенного типа животного" могут быть характеристиками (тенденцией определенного типа животного к выбору шаблона поведения или вероятностью, с которой выбираются различные шаблоны) различных шаблонов поведения (или режима поведения) животного, когда транспортное средство приближается к животному, например, возможных шаблонов поведения, указывающих то, что животное убегает (бежит) от транспортного средства, остается в этой позиции (замирает) или выбегает на проезжую дорогу. "Значения индекса характеристик поведения" могут быть значениями, представляющими "характеристики поведения" каждого типа животных. "Значения индекса характеристик поведения" могут быть значением флага, присоединенным к каждому блоку информации относительно характеристик поведения, которые получаются заранее посредством исследования, и могут формироваться для отдельного типа животных. Более конкретно, как описано ниже, значение может быть значением, которое получается заранее посредством исследования и которое указывает вероятность формирования для возможного режима поведения, сформированного для отдельного типа животных, либо значением, которое представляет скорость и/или направление перемещения в возможном режиме поведения. При "прогнозировании будущей области присутствия животного", которое выполняется с использованием "значений индекса характеристик поведения", область, заданная посредством границы, в которой животное должно присутствовать в будущем, либо будущий путь перемещения может прогнозироваться в качестве фактической области. Как подробно описано ниже, может определяться распределение будущих областей присутствия животного в плоской области около транспортного средства. В варианте осуществления, блок прогнозирования области присутствия животных может включать в себя блок хранения значений индекса характеристик поведения, который заранее сохраняет группу данных по "значениям индекса характеристик поведения" животного такого типа, предположительно вышедшего на проезжую дорогу транспортного средства, и может выбирать значения индекса характеристик поведения определенного типа животного из группы данных, сохраненных в блоке хранения значений индекса характеристик поведения. Блок захвата, описанный выше, может быть бортовой камерой, которая захватывает окрестность транспортного средства и формирует изображение. Блок обнаружения изображений животных и блок определения типов животных могут реализовываться в любом режиме посредством блока, который обнаруживает изображение животного в захваченном изображении и определяет тип животного с использованием любого способа обработки изображений, такого как способ извлечения контуров или способ сопоставления с шаблоном.
[0008] Согласно вышеописанной конфигурации, когда изображение животного обнаруживается в изображении около транспортного средства, полученном посредством блока захвата, такого как бортовая камера, в то время когда транспортное средство движется, сначала определяется тип животного, и с использованием информации относительно "характеристик поведения" определенного типа животного, прогнозируется область присутствия животного. В этом случае, характеристики поведения обнаруженного типа животных отражаются в информации относительно прогнозной области присутствия животного. Следовательно, предполагается, что результат прогнозирования является более ясным или более точным, чем раньше. Это позволяет более ясно и более точно определять вероятность того, будет или нет животное, обнаруженное в изображении окрестности транспортного средства, сталкиваться с транспортным средством.
[0009] В аспекте, описанном выше, устройство помощи в предотвращении столкновений для транспортного средства дополнительно может включать в себя блок выбора обработки помощи, выполненный с возможностью выбирать режим обработки помощи для предотвращения столкновений на основе определенного типа животного. Помимо этого, блок выполнения обработки помощи может быть выполнен с возможностью осуществлять обработку помощи для выбранного режима. Как уже описано выше, характеристики поведения животного, когда транспортное средство приближается к животному, отличаются согласно типу. Следовательно, помощь, эффективная для предотвращения столкновений, отличается согласно типу животных. Например, формирование предупреждения является эффективным для животного такого типа, который реагирует на звук или свет и отдаляется от транспортного средства. Помощь посредством торможения или руления транспортным средством для предоставления возможности транспортному средству избегать въезда в область присутствия животного является эффективной для животного такого типа, который не реагирует на предупреждение и выходит на проезжую дорогу. Иными словами, режим эффективной обработки помощи отличается согласно определенному типу животного. Следовательно, если животное обнаруживается около транспортного средства, и имеется вероятность того, что животное будет сталкиваться с транспортным средством, режим обработки помощи также может выбираться согласно типу животного. Этот режим обеспечивает возможность предоставления более подходящей помощи при вождении для предотвращения столкновений. Он также уменьшает дискомфорт и ощущение непривычности в окрестности или уменьшает означенное для водителя или пассажиров.
[0010] В аспекте, описанном выше, прогнозирование будущей области присутствия, выполняемое посредством блока прогнозирования области присутствия животных, подробнее, результат прогнозирования, может быть представлен в различных режимах. Например, в одном режиме, результат прогнозирования может быть представлен посредством траектории, начинающейся в позиции, в которой животное обнаруживается, в изображении в плоской области около транспортного средства. Помимо этого, область, в которой животное может присутствовать в будущем после того, как определенное время истекло со времени, когда животное обнаруживается в изображении, может задаваться в качестве результата прогнозирования. Помимо этого, как описано в разделе "Подробное описание вариантов осуществления", результат прогнозирования может представляться как распределение будущих вероятностей присутствия животного в плоской области около транспортного средства. Будущая область присутствия животного прогнозируется с использованием текущего направления, позиции и скорости перемещения животного, полученных из изображения и значений индекса характеристик поведения определенного типа животных (например, значения, указывающего вероятность формирования возможного режима поведения, и значения, представляющего скорость и/или направление перемещения в возможном режиме поведения в определенном типе животного, как описано выше). Следовательно, поскольку характеристики поведения определенного типа животного отражаются на результате прогнозирования будущей области присутствия животного, предполагается, что результат является более ясным или более точным. Помимо этого, при определении вероятности столкновения, область, которая должна обрабатываться, или область, которая должна анализироваться, может сужаться. Это приводит к уменьшению вычислительной нагрузки и времени обработки. Помимо этого, в аспекте, описанном выше, блок прогнозирования области присутствия животных может быть выполнен с возможностью формировать распределение будущих вероятностей присутствия животного в плоской области около транспортного средства в качестве результата прогнозирования будущей области присутствия животного с использованием значений индекса характеристик поведения определенного типа животного и текущего направления, позиции и скорости перемещения животного. Помимо этого, значения индекса характеристик поведения определенного типа животного могут включать в себя направление перемещения и скорость перемещения животного, которые могут формироваться в шаблоне поведения, ожидаемом в определенном типе животного, а также вероятность формирования этого шаблона поведения.
[0011] Режим или шаблон поведения может отличаться согласно типу животных между тем, когда животное присутствует в качестве отдельной особи, и тем, когда животное принадлежит группе. Следовательно, в аспекте, описанном выше, блок определения типов животных может быть выполнен с возможностью определять то, принадлежит или нет животное, изображение которого обнаруживается в изображении, группе, и если характеристики поведения отличаются между тем, когда животное определенного типа принадлежит группе, и тем, когда животное присутствует в качестве отдельной особи, блок прогнозирования области присутствия животных может быть выполнен с возможностью прогнозировать будущую область присутствия животного с использованием значений индекса характеристик поведения, которые отличаются между тем, когда животное в изображении определяется как формирующее группу, и тем, когда животное не определяется как формирующее группу. Это дополнительно повышает точность результата прогнозирования будущей области присутствия животного, когда животное принадлежит группе.
[0012] Определение вероятности столкновения животного с транспортным средством в аспекте, описанном выше, вкратце описывается следующим образом. Вероятность столкновения животного с транспортным средством определяется посредством обращения к результату прогнозирования будущей области присутствия животного, полученному с учетом характеристик поведения типа животных, как описано выше, чтобы определять то, будет или нет животное выходить на проезжую часть или входить в будущую область присутствия транспортного средства. Чтобы более точно определять вероятность столкновения в этой обработке, устройство помощи в предотвращении столкновений для транспортного средства в аспекте, описанном выше, дополнительно может включать в себя блок прогнозирования области присутствия транспортного средства, который прогнозирует будущую область присутствия транспортного средства, при этом блок определения вероятности столкновения может быть выполнен с возможностью определять то, имеется или нет вероятность столкновения животного с транспортным средством, на основе результата прогнозирования будущей области присутствия животного и результата прогнозирования будущей области присутствия транспортного средства. При прогнозировании будущей области присутствия транспортного средства, результат прогнозирования может быть представлен посредством будущей траектории, определенной на основе состояния движения, такого как скорость транспортного средства, из текущей позиции транспортного средства, либо область, в которой транспортное средство может присутствовать в будущем после того, как определенное время истекло со времени, когда животное обнаруживается в изображении, может задаваться в качестве результата прогнозирования. Помимо этого, как описано в разделе "Подробное описание вариантов осуществления", результат прогнозирования может представляться как распределение будущих вероятностей присутствия транспортного средства в плоской области около транспортного средства. В этом случае, блок определения вероятности столкновения может быть выполнен с возможностью определять вероятность столкновения животного с транспортным средством на основе распределения будущих вероятностей присутствия животного и распределения будущих вероятностей присутствия транспортного средства. Более конкретно, как описано ниже, может быть определено то, что имеется вероятность столкновения, если имеется область или позиция с высокой вероятностью присутствия животного и область или позиция с высокой вероятностью присутствия транспортного средства в пределах диапазона предварительно определенного расстояния, либо если имеется область, в которой животное и транспортное средство присутствуют одновременно с высокой вероятностью, в плоской области около транспортного средства.
[0013] Предложены различные устройства, которые обнаруживают то, появляется или нет животное около движущегося транспортного средства, определяют вероятность столкновения и выполняют обработку помощи для предотвращения столкновений. Тем не менее, эти устройства не выполняют обработку для определения типа животных и в силу этого не прогнозируют поведение животных посредством рассмотрения различия в характеристиках поведения, которые зависят от типа животных. В этом случае, даже если присутствие животного обнаруживается около транспортного средства в то время, когда транспортное средство движется, поведение обнаруженного животного, такое как направление перемещения или скорость перемещения, фактически не может определяться, и в силу этого затруднительно точно прогнозировать будущую область присутствия.
[0014] С другой стороны, в аспекте, описанном выше, если животное обнаруживается около движущегося транспортного средства, сначала определяется тип животного, как описано выше, обращаются к характеристикам поведения животного того типа, и после этого для каждого типа животных может прогнозироваться то, как животное должно перемещаться в дальнейшем около транспортного средства. Следовательно, эта способность дает возможность точной оценки области или вероятной области присутствия животного и дает возможность точного прогнозирования вероятности столкновения животного с транспортным средством, как описано выше, позволяя точно определять то, следует или нет выполнять помощь для предотвращения столкновений. Помимо этого, поскольку будущая прогнозная тенденция поведения измеряется согласно обнаруженному типу животного, как описано выше, область, в которой обработка, связанная с помощью в предотвращении столкновений, должна выполняться, избирательно определяется (сужается). Это должно приводить к уменьшению вычислительной нагрузки и времени обработки и позволять ускорять определение вероятности столкновения, определение необходимости в обработке помощи и предоставление обработки помощи. Помимо этого, в конфигурации, в которой режим обработки помощи определяется согласно типу животных, более эффективная помощь может выполняться для обнаруженного животного, и в силу этого она является преимущественной в том, что необязательная помощь не должна выполняться.
[0015] Согласно второму аспекту настоящего изобретения, устройство помощи в предотвращении столкновений для транспортного средства включает в себя: устройство захвата, получающее изображение около транспортного средства; и электронное устройство управления. Электронное устройство управления реализует функции блока обнаружения изображений животных, выполненного с возможностью обнаруживать присутствие или отсутствие изображения животного в изображении, блока определения типов животных, выполненного с возможностью определять тип животного, когда изображение животного обнаруживается в изображении, блока прогнозирования области присутствия животных, выполненного с возможностью прогнозировать будущую область присутствия животного на основе значений индекса характеристик поведения, представляющих характеристики поведения определенного типа животного, блока определения вероятности столкновения, выполненного с возможностью определять вероятность столкновения животного с транспортным средством на основе результата прогнозирования будущей области присутствия животного, и блока выполнения обработки помощи, выполненного с возможностью осуществлять обработку помощи для предотвращения столкновений, когда определяется то, что имеется вероятность столкновения животного с транспортным средством.
Краткое описание чертежей
[0016] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1A является схематичным видом сверху транспортного средства, на котором монтируется вариант осуществления устройства помощи в предотвращении столкновений в режиме настоящего изобретения;
Фиг. 1B является блок-схемой, показывающей конфигурацию варианта осуществления устройства помощи в предотвращении столкновений в режиме настоящего изобретения;
Фиг. 2A является блок-схемой последовательности операций способа, показывающей вариант осуществления операции обработки в ECU распознавания устройства помощи в предотвращении столкновений в режиме настоящего изобретения;
Фиг. 2B является блок-схемой последовательности операций способа, показывающей вариант осуществления обработки определения типов животных в операции обработки на фиг. 2A;
Фиг. 3 является блок-схемой последовательности операций способа, показывающей вариант осуществления операции обработки в ECU управления помощью устройства помощи в предотвращении столкновений в режиме настоящего изобретения;
Фиг. 4A является схемой, показывающей обработку извлечения контуров для обнаружения изображения животного в изображении, захваченном посредством бортовой камеры;
Фиг. 4B является принципиальной схемой, показывающей контурные изображения, извлеченные из изображений четвероногого животного, пешехода (двуногого шагающего объекта) и транспортного средства в изображении;
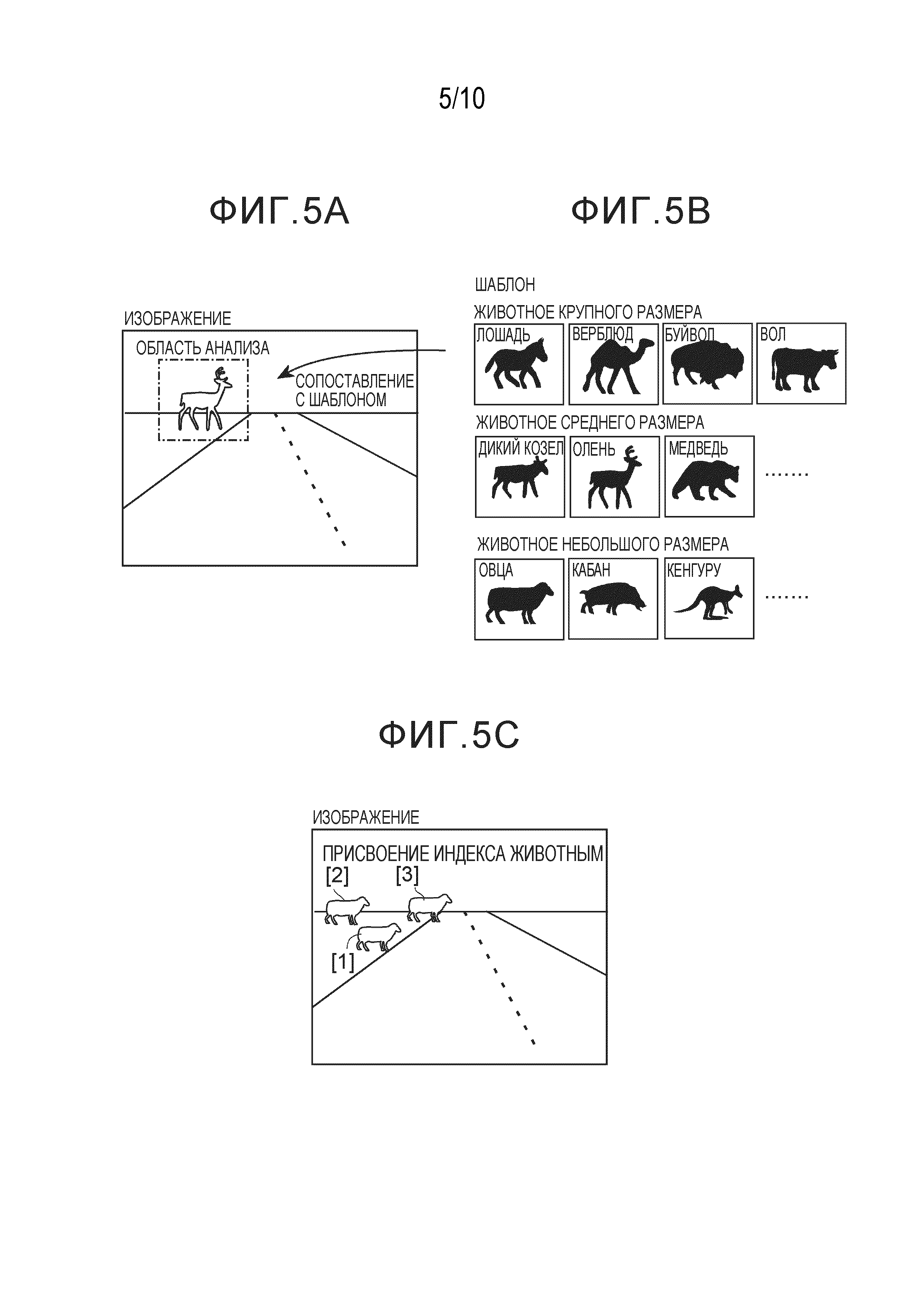
Фиг. 5A является схемой, показывающей обработку для определения типа животного посредством выполнения сопоставления с шаблоном для изображения животного, обнаруженного в изображении, захваченном посредством бортовой камеры;
Фиг. 5B является схемой, схематично показывающей пример шаблонов изображений животных, используемых для сопоставления с шаблоном;
Фиг. 5C является схемой, схематично показывающей изображение животных в изображении, захваченном посредством бортовой камеры, когда множество животных формирует группу, с индексами, присоединенными к отдельным животным на чертеже;
Фиг. 6A является схемой, показывающей шаблоны поведения, которые используются для того, чтобы прогнозировать будущую область присутствия животного, и выбираются посредством животного в модели перемещения животного, а также их вероятности формирования, в режиме настоящего изобретения;
Фиг. 6B является схемой, показывающей расстояние перемещения в единицу времени и направление для позиции животного в модели перемещения животного;
Фиг. 6C является схемой, показывающей направление перемещения животного в модели перемещения животного;
Фиг. 6D является графиком, схематично показывающим распределение вероятностей pθ формирования направления θik перемещения ширины Δθik угла, которое приводится в качестве одного из значений индекса характеристик поведения животного в модели перемещения животного;
Фиг. 6E является графиком, представленным посредством преобразования распределения вероятностей pθ формирования направления θik перемещения ширины Δθik угла, показанного на фиг. 6D, в расстояние в направлении дуги с радиусом r;
Фиг. 6F является графиком, схематично показывающим распределение вероятностей pj формирования резкого изменения J скорости, которое приводится в качестве одного из значений индекса характеристик поведения животного в модели перемещения животного;
Фиг. 6G является графиком, схематично показывающим распределение вероятностей pma формирования максимальной возможной скорости Vmax животного, которое приводится в качестве одного из значений индекса характеристик поведения животного в модели перемещения животного;
Фиг. 6H является схемой, схематично показывающей распределение будущих позиций присутствия животного, которое получается согласно модели перемещения животного;
Фиг. 7A является схемой, схематично показывающей изменение в позиции с наибольшей вероятностью присутствия во времени для каждого шаблона поведения, с использованием модели перемещения животного, используемой для прогнозирования будущей области присутствия животного в режиме настоящего изобретения (первый режим);
Фиг. 7B является схемой, схематично показывающей пример распределения графиков прогнозированных позиций будущего животного в плоской области около транспортного средства в определенное время t, которое вычисляется согласно модели перемещения животного, в которой случайные числа используются в качестве значений индекса характеристик поведения (второй режим);
Фиг. 7C является схемой, схематично показывающей распределение будущих вероятностей p присутствия, вычисленных из графиков прогнозных позиций, показанных на фиг. 7B;
Фиг. 7D является схемой, схематично показывающей распределение будущих вероятностей Pa присутствия животного в определенное время t;
Фиг. 7E является схемой, схематично показывающей изменение во времени в распределении будущих вероятностей присутствия животного (пунктирная линия указывает контурную линию вероятности);
Фиг. 8 является схемой, показывающей пример списка значений индекса характеристик поведения животного посредством типа животных, который используется для прогнозирования будущей области присутствия животного;
Фиг. 9A является схемой, показывающей обработку для определения вероятности столкновения между транспортным средством и животным в режиме (первом режиме), в котором позиция с наибольшей вероятностью присутствия оценивается в каждый момент времени для каждого шаблона поведения в качестве прогнозирования будущей области присутствия животного;
Фиг. 9B является схемой, показывающей обработку для определения вероятности столкновения между транспортным средством и животным в режиме (втором режиме), в котором распределение вероятностей присутствия животного в области около транспортного средства формируется в качестве прогнозирования будущей области присутствия животного;
Фиг. 9C является схемой, схематично показывающей то, что распределение будущих вероятностей присутствия животного перекрывается с областью будущего присутствия с высокой вероятностью транспортного средства в то время, когда распределение будущей вероятности присутствия животного изменяется во времени;
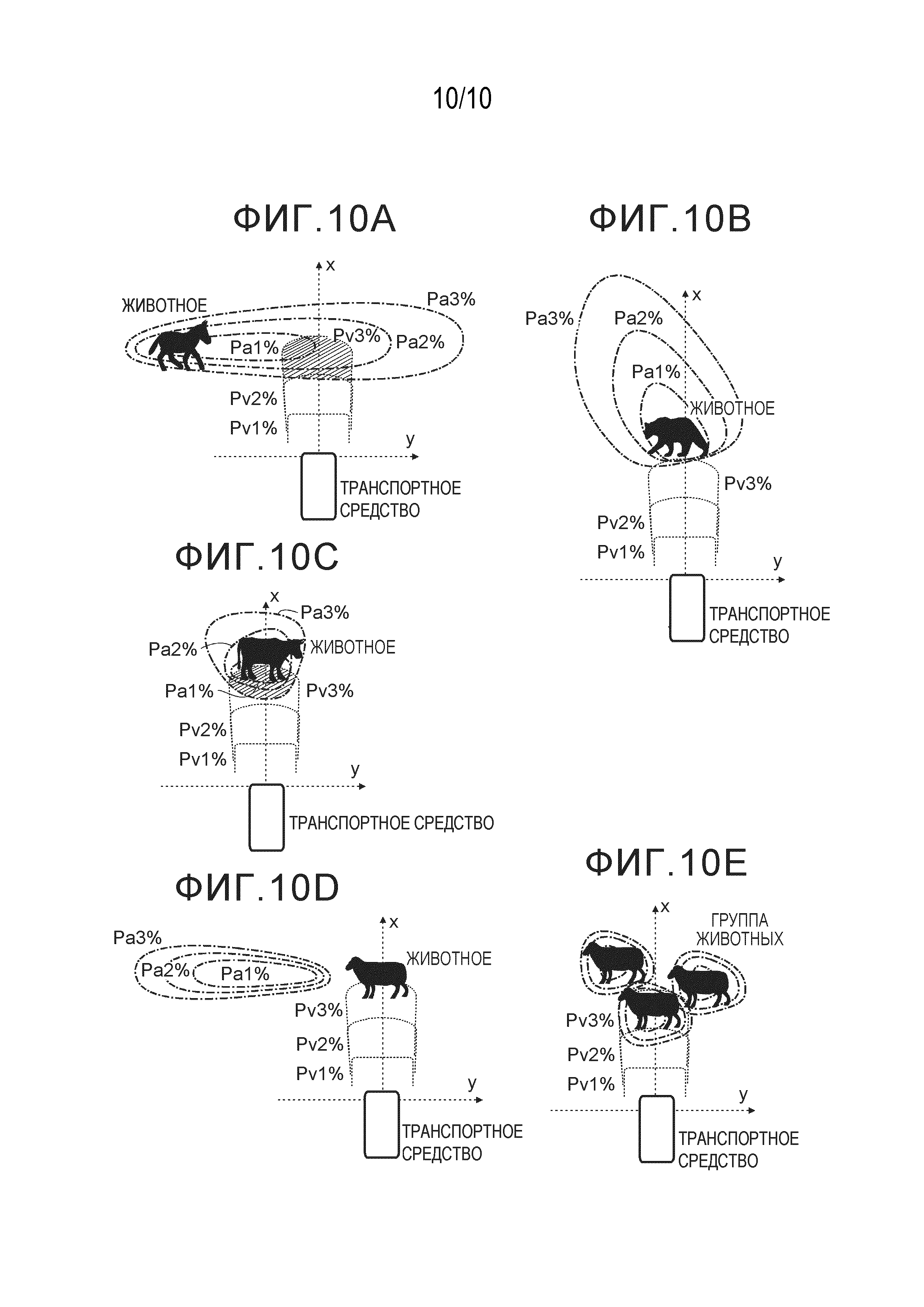
Фиг. 10A является схемой, аналогичной схеме на фиг. 9B, схематично показывающей пример, в котором распределение будущих вероятностей присутствия животного отличается согласно типу животного;
Фиг. 10B является схемой, аналогичной схеме на фиг. 9B, схематично показывающей пример, в котором распределение будущих вероятностей присутствия животного отличается согласно типу животного;
Фиг. 10C является схемой, аналогичной схеме на фиг. 9B, схематично показывающей пример, в котором распределение будущих вероятностей присутствия животного отличается согласно типу животного;
Фиг. 10D является схемой, аналогичной схеме на фиг. 9B, схематично показывающей случай, в котором животное конкретного типа существует в качестве отдельной особи; и
Фиг. 10E является схемой, аналогичной схеме на фиг. 9B, схематично показывающей случай, в котором животные идентичного типа существуют в качестве группы.
Подробное описание вариантов осуществления
[0017] Ниже подробно описываются варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи. На чертежах, идентичная ссылка с номером указывает идентичный компонент.
[0018] Предпочтительный вариант осуществления устройства помощи в предотвращении столкновений в режиме настоящего изобретения может монтироваться на транспортном средстве 10, таком как стандартный автомобиль, как схематично показано на фиг. 1A. В нормальном режиме, устройство приводной системы, которое формирует движущую/тормозную силу в колесах (показана только часть устройства), устройство 40 тормозной системы, которое формирует тормозную силу в колесах, и устройство 30 системы рулевого управления монтируются на транспортном средстве 10, которое имеет левое и правое передние колеса 12FL и 12FR и левое и правое задние колеса 12RL и 12RR. Устройство 40 тормозной системы работает следующим образом. В нормальное время, тормозное давление в колесных тормозных цилиндрах 42i (i=FL, FR, RL, RR; эта система обозначений используется в нижеприведенном описании), установленных на колесах, т.е. тормозная силе в колесах, регулируется посредством гидравлической схемы 46, сообщающейся с главным цилиндром 45, который работает, когда водитель нажимает педаль 44 тормоза. С другой стороны, когда торможение применяется к транспортному средству посредством устройства помощи в предотвращении столкновений в настоящем изобретении в качестве помощи в предотвращении столкновений, тормозное давление в колесных тормозных цилиндрах колес увеличивается на основе команды из электронного устройства 60 управления, с тем чтобы формировать тормозную силу в колесах. Устройство 40 тормозной системы может представлять собой устройство, которое пневматически или электромагнитно прикладывает тормозную силу к колесам, либо может представлять собой любое устройство, используемое специалистами в данной области техники. В нормальное время, устройство системы рулевого управления может представлять собой устройство усилителя рулевого управления, которое передает вращение руля 32, управляемого водителем, на поперечные рулевые тяги 36L и 36R для руления передними колесами 12FL и 12FR при повышении вращающей силы посредством усилителя 34. С другой стороны, когда транспортное средство управляется посредством устройства помощи в предотвращении столкновений в режиме настоящего изобретения в качестве помощи в предотвращении столкновений, усилитель 34 работает на основе команды из электронного устройства 60 управления для руления передними колесами 12FL и 12FR.
[0019] Помимо этого, камера 70 для захвата ситуации в направлении движения транспортного средства и его окрестности монтируется на транспортном средстве 10, на котором монтируется устройство помощи в предотвращении столкновений в режиме настоящего изобретения, и информация s1 захваченных изображений отправляется в электронное устройство 60 управления. Камера 70 может представлять собой видеокамеру, обычно используемую в этой области техники. Камера, которая используется, должна иметь функцию для того, чтобы захватывать изображение в цвете и в монохроме, преобразовывать захваченное изображение в сигнал в форме, обрабатываемой посредством компьютера, и отправлять преобразованный сигнал в электронное устройство 60 управления. Помимо этого, динамик 74 и световые приборы 72 (световые приборы могут представлять собой передние фары, обычно смонтированные на транспортном средстве), используемые для того, чтобы выдавать предупреждение w1 посредством звука и/или света, могут монтироваться для использования в помощи в предотвращении столкновений.
[0020] Работа устройства помощи в предотвращении столкновений в режиме настоящего изобретения, описанного выше, выполняется посредством электронного устройства 60 управления. Электронное устройство 60 управления может включать в себя стандартный микрокомпьютер, который включает в себя CPU (центральный процессор_, ROM (постоянное запоминающее устройство), RAM (оперативное запоминающее устройство) и устройство порта ввода/вывода, взаимно соединенные посредством двунаправленной общей шины, и возбуждающую схему. Конфигурация и работа компонентов устройства помощи в предотвращении столкновений в режиме настоящего изобретения, которая описывается ниже, может реализовываться посредством работы электронного устройства 60 управления (компьютера) под управлением программы. В дополнение к информации s1 изображений из камеры 70 электронное устройство 60 управления принимает следующее для прогнозирования будущей области присутствия транспортного средства: значения VwFL, VwFR, VwRL и VwRR скорости вращения колес из датчика 14 скорости вращения колес, предусмотренного для определения скорости транспортного средства транспортного средства, скорость γ относительно вертикальной оси из датчика 62 скорости относительно вертикальной оси (гиродатчика и т.д.), чтобы измерять угол относительно вертикальной оси, и угол δ поворота при рулении из усилителя 34. Хотя не показано, различные параметры (например, значения датчика продольной составляющей G), необходимые для различных типов управления, которые должны выполняться в транспортном средстве в этом варианте осуществления, могут вводиться в электронное устройство 60 управления, и различные команды управления могут выводиться из электронного устройства 60 управления на соответствующие устройства.
[0021] Ссылаясь на фиг. 1B, конкретная конфигурация устройства помощи в предотвращении столкновений в режиме настоящего изобретения, реализованная посредством электронного устройства 60 управления, включает в себя ECU распознавания и ECU управления помощью. ECU распознавания включает в себя блок обнаружения изображения объекта, который обнаруживает присутствие изображения объекта (такого объекта, как животное, пешеход и транспортное средство, которое может сталкиваться с транспортным средством) в изображении бортовой камеры 70; блок идентификации возможных вариантов животных, который идентифицирует то, является или нет объект животным, когда изображение объекта обнаруживается; блок определения типов животных, который определяет тип животного, когда объект является животным; и блок обнаружения информации позиции животного, который обнаруживает информацию позиции (позицию, скорость и направление при просмотре из транспортного средства) для животного. С другой стороны, ECU управления помощью включает в себя запоминающее устройство, которое заранее сохраняет группу данных "значений индекса характеристик поведения", которые представляют характеристики поведения животных типов, которые, как предполагается, выходят на проезжую дорогу транспортного средства; блок прогнозирования области присутствия животных, который прогнозирует будущую область присутствия животного с использованием значений индекса характеристик поведения, которые представляют характеристики поведения определенного типа животного, обнаруженного в изображении в запоминающем устройстве, и информацию позиции для животного; блок прогнозирования области присутствия транспортного средства, который прогнозирует будущую область присутствия транспортного средства с использованием информации состояния движения на транспортном средстве, т.е. значений индекса, представляющих текущее состояние движения, таких как скорость, угол поворота при рулении или скорость относительно вертикальной оси; блок определения вероятности столкновения, который определяет то, имеется или нет вероятность столкновения между транспортным средством и животным, с использованием результата прогнозирования будущей области присутствия животного и результата прогнозирования будущей области присутствия транспортного средства; и блок выбора помощи, который выбирает помощь для предотвращения столкновения согласно типу животного, когда определяется то, что имеется вероятность столкновения. При предоставлении помощи, блока отображения, динамик или световые приборы работают согласно режиму выбранной помощи, и команда управления отправляется в соответствующее устройство управления для выполнения управления торможением или управления рулением по мере необходимости. Как описано выше, следует понимать, что конфигурация и работа блоков, описанных выше, реализуется посредством выполнения программы в компьютере (электронном устройстве 60 управления). Далее подробно описывается обработка, выполняемая посредством ECU распознавания для помощи в предотвращении столкновений (для распознавания изображения животного в изображении и для определения типа животных), и обработка, выполняемая посредством ECU управления помощью (для определения того, имеется или нет вероятность столкновения, и для предоставления помощи для предотвращения столкновений).
[0022] Устройство помощи в предотвращении столкновений в режиме настоящего изобретения выполняет следующее, как описано в разделе "Сущность изобретения". Вкратце, когда изображение животного обнаруживается в изображении, созданном посредством захвата области в направлении движения движущегося транспортного средства и его окрестности, устройство помощи в предотвращении столкновений прогнозирует будущую область присутствия животного и определяет то, имеется или нет вероятность того, что животное будет сталкиваться с транспортным средством, и когда имеется вероятность столкновения, предоставляет помощь в предотвращении столкновений. В такой конфигурации, поскольку шаблон поведения и режим поведения животного зависят от типа, как описано выше, неизвестно, в каком направлении и на какой скорости должно перемещаться животное, если тип не идентифицируется (например, в зависимости от типа, животное может иметь сильную тенденцию к тому, чтобы перемещаться в направлении, отличающемся от направления, когда оно обнаружено). В этом случае, становится затруднительным точно прогнозировать будущую область присутствия животного. Чтобы повышать точность при прогнозировании будущей области присутствия животного в случае, в котором тип не идентифицируется, необходимо отслеживать изображение животного в изображении в течение относительно длительного времени, чтобы определять его режим поведения. Тем не менее, поскольку направление перемещения и скорость перемещения животного являются неопределенными, существует потребность в выполнении поиска в большей области в изображении, и в этом случае, значительно возрастает вычислительная нагрузка и время обработки. Помимо этого, при предоставлении помощи в предотвращении столкновений, эффективный режим помощи для предотвращения столкновений зависит от типа животного. Для типа животного, которое отдаляется от транспортного средства посредством простой выдачи предупреждения посредством звука или света, предупреждение посредством звука или света является эффективной помощью. Для типа животного, которое не реагирует на предупреждение посредством звука или света, но может выходить на проезжую дорогу транспортного средства, избегание животного посредством торможения или руления является эффективным режимом помощи.
[0023] Когда изображение животного обнаруживается, устройство помощи в предотвращении столкновений в режиме настоящего изобретения сначала определяет тип животного, как описано выше, и прогнозирует будущую область присутствия животного с учетом характеристик поведения определенного типа, т.е. вероятного шаблона поведения или режима поведения, животного. В этом случае, устройство помощи в предотвращении столкновений ссылается на характеристики поведения типа обнаруженного животного, чтобы повышать точность в результате прогнозирования будущей области присутствия обнаруженного животного. Одновременно, по сравнению с тем, когда направление, в котором животное с большой вероятностью должно перемещаться, и скорость, с которой должно перемещаться транспортное средство, неизвестны, устройство помощи в предотвращении столкновений уменьшает время для отслеживания животного в изображении, приводя к уменьшению вычислительной нагрузки и времени обработки. Помимо этого, способность идентифицировать тип животного позволяет выбирать или определять эффективный режим в качестве помощи в предотвращении столкновений согласно типу животного, за счет этого предоставляя подходящую помощь в предотвращении столкновений. Основная конфигурация устройства помощи в предотвращении столкновений в режиме настоящего изобретения является конфигурацией, специально разработанной для помощи в предотвращении столкновений, когда изображение животного обнаруживается в изображении. Когда изображение, не содержащее животных, обнаруживается в изображении, обработка для помощи в предотвращении столкновений может выполняться в некотором другом режиме. Следовательно, устройство помощи в предотвращении столкновений в режиме настоящего изобретения может реализовываться как часть устройства помощи в предотвращении столкновений общего назначения для транспортного средства. Далее описывается каждая обработка.
[0024] Ссылаясь на фиг. 2A, в обработке обнаружения изображений животных и определения типов животных, выполняемой для изображения посредством ECU распознавания в устройстве в режиме настоящего изобретения, ECU распознавания сначала получает данные изображений, захваченные посредством бортовой камеры 70 (этап 10). После этого, ECU распознавания обнаруживает то, имеется или нет изображение объекта, такого как животное, пешеход и транспортное средство, с которым может сталкиваться транспортное средство, в захваченном изображении (этап 12). Изображение, захваченное посредством бортовой камеры 70, может быть изображением, созданным согласно техническим требованиям, обычно используемым в этой области техники, как схематично показано в верхней части фиг. 4A. Угол обзора изображения типично регулируется таким образом, что включаются проезжая дорога R и ее окрестность впереди движущегося транспортного средства. Обработка обнаружения для присутствия изображения объекта может выполняться посредством произвольного способа обработки изображений. В одном режиме, как схематично показано в верхней части фиг. 4A, разность в яркости сначала вычисляется для каждого пиксела во временно непрерывных изображениях. Как результат, разность является по существу нулевой в фоновом изображении или в изображении стационарного объекта, в то время как позиционное расхождение формируется между непрерывными изображениями в изображении d движущегося объекта, такого как животное, и как показано в нижней части фиг. 4A, контур изображения d формируется в изображениях Δt1 и Δt2, представляющих разность между непрерывными изображениями, в качестве разностного изображения S значений яркости. Следовательно, посредством извлечения контурного изображения S, которое является разностью в значениях яркости, может обнаруживаться присутствие изображения d движущегося объекта. Более конкретно, при обнаружении разностного изображения S значений яркости, т.е. при извлечении контура изображения d движущегося объекта, область со значениями яркости, превышающими предварительно определенное пороговое значение, извлекается в разностных изображениях Δt1 и Δt2. Это дает возможность обнаружения контурного изображения S, т.е. области присутствия изображения d движущегося объекта (В вычислении разностей в непрерывных изображениях, фоновое расхождение, сформированное по мере того, как движется транспортное средство, и шум, сформированный посредством захвата, могут игнорироваться посредством задания порогового значения для извлечения разностного изображения S значений яркости в разностных изображениях Δt1 и Δt2. Помимо этого, разностное изображение между непрерывными изображениями может вычисляться после коррекции фонового расхождения между непрерывными изображениями с использованием информации скорости транспортного средства).
[0025] Если изображение объекта обнаруживается в изображении, захваченном посредством камеры 70 таким способом, выполняется определение в отношении того, является или нет изображение животным (этап 14). Обработка для определения того, является или нет возможный вариант изображения обнаруженного объекта животным, может выполняться посредством произвольного способа обработки изображений. В одном режиме, определение может выполняться на основе конфигурации контурного изображения S в разностных изображениях Δt1 и Δt2, описанной выше. Более конкретно, как схематично показано на фиг. 4B, контурные изображения a и b, представляющие две ноги, обнаруживаются в контурном изображении, когда объект является пешеходом (двуногим шагающим объектом) (чертеж в середине), и контурное изображение a, представляющее структуру, обнаруживается, когда объект является транспортным средством (чертеж справа). С другой стороны, контурные изображения a, b, c, d и e четырех ног и шеи обнаруживаются, когда объект является четвероногим животным (чертеж слева). Следовательно, можно определять то, является или нет изображение d движущегося объекта четвероногим животным, посредством определения того, имеются или нет контурные изображения a, b, c, d и e четырех ног и шеи в контурном изображении S разностного изображения.
[0026] Если изображение движущегося объекта не найдено в обработке определения, описанной выше, начинается следующий цикл. Если изображение d движущегося объекта является пешеходом (двуногим шагающим объектом) или транспортным средством, может выполняться любая обработка, отличная от обработки в режиме настоящего изобретения. Если изображение d движущегося объекта является четвероногим животным, выполняется обработка определения типов животных (этап 16). Типично, как схематично показано на фиг. 5B, обработка определения типов животных может выполняться посредством выполнения сопоставления с шаблоном для изображения, полученного посредством бортовой камеры 70, с использованием подготовленных шаблонов изображений различных животных, которые, как предполагается, должны выходить на проезжую дорогу транспортного средства. В этом случае, чтобы сокращать число возможных вариантов шаблонов, которые должны использоваться для сопоставления с изображением животного в изображении, животное может классифицироваться на один из размеров, например, на большой размер, средний размер и небольшой размер, перед выполнением сопоставления с шаблоном. Это дает возможность выбора шаблона, который используется для сопоставления, из шаблонов животных, имеющих размер, определенный посредством классификации.
[0027] Более конкретно, ссылаясь на фиг. 2B, область анализа сопоставления с шаблоном сначала задается в изображении, полученном посредством бортовой камеры 70, как показано на фиг. 5A (step30). Поскольку область присутствия изображения объекта в вышеуказанном изображении уже обнаружена, область анализа может задаваться на основе области присутствия. Затем, обнаруженное животное классифицируется по размеру на один из размеров, как описано выше, согласно размеру животных, оцененному из размера изображения объекта (этап 32). В это время, поскольку угол обзора целого изображения, снятого камерой известен, и транспортное средство, как предполагается, движется по существу в плоскости, размер животного в изображении может оцениваться из размера изображения объекта в изображении (угла обзора) и его позиции в изображении.
[0028] После того, как животное в изображении классифицировано посредством размера, выбирается один из шаблонов животных, соответствующих размеру (этап 34), направление регулируется между изображением животного в изображении и шаблоном (этап 36) и после этого выполняется сопоставление с шаблоном (этап 38). Например, при выборе шаблона, если размер изображения животного в изображении классифицируется как средний размер, один из шаблонов животных среднего размера выбирается из шаблонов, показанных на фиг. 5B. При регулировании направления между изображением животного и шаблоном, поскольку направление изображения животного известно из компоновки контурного изображения шеи относительно контурного изображения ног в контурном изображении, описанном выше, направление выбранного шаблона может определяться таким образом, что оно регулируется согласно позиционному отношению между ногами и шеей изображения животного. Сопоставление с шаблоном может выполняться с использованием произвольного способа обработки изображений. Например, вычисляется значение функции взаимной корреляции между значением яркости области анализа изображения и значением яркости шаблона. Если значение функции взаимной корреляции превышает предварительно определенное значение, может быть определено то, что изображение животного совпадает с шаблоном. Сопоставление с шаблоном может выполняться для изображения животного в нескольких изображениях.
[0029] Таким образом, при сопоставлении с шаблоном определяется то, совпадает или нет изображение животного с выбранным шаблоном (этап 40). Если определено то, что изображение животного совпадает с шаблоном, тип животного определяется как представляющий собой тип шаблона, который совпадает (этап 44). С другой стороны, если определено то, что изображение животного не совпадает с шаблоном, выбирается один из других шаблонов животных с размером, определенным посредством классификации изображений животного. Идентичная обработка, как описано выше, повторяется, чтобы выполнять поиск типа животного в изображении до тех пор, пока не будет найден совпадающий рисунок. Если изображение животного не совпадает ни с одним из подготовленных шаблонов животных, определяется то, что найдено животное, не обработанное посредством этой помощи в предотвращении столкновений, (этап 46). В этом случае, следующий цикл начинается (этап 18). (Животное небольшого размера (собака, кошка и т.д.), которое является четвероногим животным, но по-прежнему меньше животных небольшого размера, показанных на фиг. 5B, не обрабатывается посредством помощи в предотвращении столкновений в режиме настоящего изобретения. Обычно, в очень редких случаях животное, которое имеет размер, для которого предпочтительно выполняется помощь в предотвращении столкновений, но не предвидится посредством помощи в предотвращении столкновений, выходит на проезжую дорогу).
[0030] Группа многих животных может обнаруживаться в изображении, как схематично показано на фиг. 5C. В этом случае, обработка, аналогичная обработке определения типов, описанной выше, может выполняться для отдельных изображений животных. После определения типов, индивидуальный номер предоставляется для каждого из изображений животных, как показано на чертеже (этап 20). Когда животное присутствует в качестве отдельной особи, индивидуальный номер может присоединяться только к этой особи.
[0031] После того, как тип животных изображения животного, включенного в изображение, определяется, как описано выше, обнаруживается информация позиции для животного либо позиция и скорость при просмотре из транспортного средства. Как описано выше, позиция животного может оцениваться из позиции изображения, включенного в изображение, и направление животного может идентифицироваться из позиционному отношению между ногами и шеей в контурном изображении S. Скорость животного (текущая скорость) может обнаруживаться из изменения позиций изображений в нескольких непрерывных изображениях. (Объем обработки изображений не увеличивается, поскольку тенденция изменения скорости не должна обнаруживаться, и позиция изображения известна).
[0032] После того, как изображение животного обнаруживается в изображении бортовой камеры 70, тип определяется, и информация позиции обнаруживается, как описано выше, к информации обращаются посредством ECU управления помощью. Затем, как показано на блок-схеме последовательности операций способа на фиг. 3, выполняются следующие три типа обработки: (1) прогнозирование будущей области присутствия животного, (2) прогнозирование будущей области присутствия транспортного средства, и (3) определение вероятности столкновения между транспортным средством и животным.
[0033] (1) Прогнозирование будущей области присутствия животного. Вкратце, при прогнозировании будущей области присутствия животного, направление перемещения и скорость животного в будущем оцениваются на основе текущей позиции, скорости и направления животного, обнаруженных в изображении камеры 70, а также на основе "значений индекса характеристик поведения", представляющих характеристики поведения типа животного. На основе этой оценки, прогнозируются позиция или диапазон в плоской области около транспортного средства, в которой животное должно присутствовать в будущем. С этой точки зрения, результат прогнозирования будущей области присутствия животного может быть представлен в различных режимах. Например, результат прогнозирования может представляться как путь перемещения животного от текущей позиции животного в позиции в произвольное время в будущем либо в качестве будущей позиции или диапазона присутствия животного в произвольное время в будущем.
[0034] В общем, для будущего поведения животного, каждый из различных шаблонов поведения может формироваться с вероятностью формирования каждого шаблона, соответствующего характеристикам поведения типа животных. Это означает то, что животное должно присутствовать в различных позициях или в различных диапазонах в плоской области около транспортного средства, на основе вероятности формирования каждого из этих различных шаблонов поведения. Например, поскольку животное рассматривается как перемещающееся в определенном направлении и с определенной скоростью с определенной вероятностью, вероятность, с которой животное должно присутствовать в определенной позиции в определенное время, может вычисляться с использованием вероятности, направления и скорости. После этого, посредством сбора вероятностей в различных позициях (не обязательно во всей области) в плоской области около транспортного средства, может определяться распределение будущих вероятностей присутствия животного в плоской области около транспортного средства. Следовательно, чтобы прогнозировать будущую область присутствия животного, вычисляются будущая позиция присутствия животного в плоской области около транспортного средства и вероятность присутствия в этой позиции, либо формируется ее распределение, в этом варианте осуществления, с использованием текущей позиции, скорости и направления животного, направления и скорости в различных возможных шаблонах поведения и вероятности формирования каждого шаблона поведения. Более конкретно, в этой обработке, вычисляются будущая позиция животного в плоской области около транспортного средства и вероятность, с которой животное должно присутствовать в этой позиции, либо вычисляется распределение вероятностей присутствия животного в плоской области около транспортного средства для каждого момента времени с использованием модели перемещения животного, в которой предполагается режим перемещения из обнаруженной позиции животного. Далее описываются модель перемещения животного, предполагаемые в этом варианте осуществления, вычисление будущей позиции присутствия животного в плоской области около транспортного средства и ее вероятности на основе модели и формирование ее распределения.
[0035] (i) Модель перемещения животного. Во-первых, как схематично показано на фиг. 6A, в модели перемещения животного предполагается то, что когда транспортное средство приближается к животному, животное определенного типа выбирает один из шаблонов поведения (остановка, бегство вперед, бегство назад, продолжение движения (без приближения к транспортному средству) с вероятностью формирования в Pik. "I" является символом, представляющим тип животных (например, лошадь, вол, овца, олень, дикий козел, медведь, кенгуру и т.д.), и "k" является символом, представляющим шаблон поведения (например, остановка, бегство вперед, бегство назад, продолжение движения (без приближения к транспортному средству)). Когда выбирается шаблон k поведения, животное предположительно должно перемещаться согласно рекуррентной формуле, приведенной ниже, как схематично показано на фиг. 6B. xik(tn+1)=xik(tn)+vik(tn+1)*cos(θo+θik)*Δt... (1), yik(tn+1)=yik(tn)+vik(tn+1)*sin(θo+θik)*Δt... (2), где xik(tn), yik(tn) и vik(tn) являются позицией присутствия во время tn, когда животное i выбирает шаблон k поведения (значения координат в системе координат с текущей позицией транспортного средства в качестве начала координат и с направлением движения транспортного средства в направлении по оси X) и скорость. Начальные значения xik, yik и vik в рекуррентной формуле, приведенной выше, являются текущей позицией (x(0), y(0)) животного в изображении и скоростью v(0) в направлении θo животного в изображении, соответственно. Следовательно, как показано на фиг. 6B, животное предположительно должно последовательно перемещаться из позиции, в которой животное обнаруживается в изображении, в направлении угла θo+θikпри просмотре из направления движения транспортного средства, vikΔt в единицу Δt времени [tn+1- tn].
[0036] В модели, приведенной выше, направление θo+θik перемещения во времени перемещения животного предположительно, подробнее, представляет собой направление, определенное посредством смещения направления θo животного в изображении посредством θik, когда выбирается шаблон k поведения, как схематично показано на фиг. 6C. Значение θik предположительно является значением в диапазоне в ширине угла Δθik, к примеру, значением, показанным на фиг. 6C, с вероятностью pθ формирования, которая соответствует распределению (центральному значению θc) колоколообразного профиля, к примеру, распределению, схематично показанному на фиг. 6D (Ширина распределения вероятностей отличается согласно типу животных и шаблону поведения). Следовательно, как схематично показано на фиг. 6C, позиции присутствия в направлении угла животного распределены согласно распределению вероятностей qθ присутствия на основе вероятности pθ формирования. Чтобы упрощать модель, значение направления θo+θik перемещения животного, которое определяется сначала, может поддерживаться неизменным. Помимо этого, ширина фактического расстояния (длина дуги), соответствующая ширине Δθik угла, становится большей по мере того, как расстояние перемещения животного становится большим. Следовательно, когда расстояние преобразуется в фактическое расстояние, вероятность pθ формирования становится более низкой по мере того, как расстояние от текущей позиции животного становится большим (r1->r2->r3->r4) (значение интегрирования является постоянным), как схематично показано на фиг. 6E. Иными словами, чем больше расстояние перемещения животного, тем ниже вероятность присутствия в каждой позиции.
[0037] Помимо этого, в модели, приведенной выше, предполагается то, что скорость животного соответствует следующей рекуррентной формуле. vik(tn+1)=min{vik(tn)+Jik, Vmaik}... (3), где Jik и Vmaik являются изменением в единицу времени скорости перемещения (резким изменением скорости) животного и максимальной скорости, соответственно, когда животное i выбирает шаблон k действий. Следовательно, рекуррентная формула выше указывает то, что скорость перемещения животного изменяется посредством резкого изменения Jik скорости в единицу времени. Тем не менее, когда vik(tn)+Jik выше максимальной скорости Vmaik, предполагается, что скорость перемещения является максимальной скоростью Vmaik, или что скорость перемещения не превышает практическое значение. Подробнее, значение резкого изменения Jik скорости предположительно является значением, определенным согласно вероятности pj формирования, которая соответствует распределению (центральному значению Jc) колоколообразного профиля, к примеру, распределению, схематично показанному на фиг. 6F (Ширина распределения вероятностей отличается согласно типу животных и шаблону поведения). Аналогично, значение максимальной скорости Vmaik предположительно может быть значением, определенным согласно вероятности pMa формирования, которая соответствует распределению колоколообразного профиля, к примеру, распределению, схематично показанному на фиг. 6G (Распределение, в котором центральное значение Vmac, которое обеспечивает максимальное значение вероятности, сдвигается в сторону более высокой скорости) (Ширина распределения вероятностей отличается согласно типу животных и шаблону поведения). Иными словами, значение скорости vik(t) животного предположительно является значением, сформированным с вероятностью pj или pMa формирования. Следовательно, снова ссылаясь на фиг. 6B, позиции после того, как животное перемещается в единицу времени, распределены согласно вероятности qr присутствия на основе вероятности pj или pMa формирования по некоторому диапазону (диапазону, указываемому посредством белых окружностей на чертеже) до и после закрашенной окружности, соответствующей центральному значению Jc или Vmac.
[0038] Фиг. 6H является схемой, схематично показывающей пример перемещения позиции животного в плоской области около транспортного средства, а также вероятностей, когда животное i предположительно должно перемещаться согласно модели, представленной посредством рекуррентных формул (1)-(3). Ссылаясь на чертеж, в модели, приведенной выше, прогнозируется то, что животное перемещается в одну из веерообразных областей, указываемых посредством II, III и IV на чертеже, согласно каждому из множества возможных шаблонов поведения с вероятностью формирования в Pi2, Pi3 и Pi4, соответственно. Подробнее, вычисление позиции и скорость животного i повторяются согласно рекуррентным формулам (1)-(3) с использованием (Ji2, Vmai2, θi2), (Ji3, Vmai3, θi3) и (Ji4, Vmai4, θi4), имеющих распределение вероятностей формирования, показанное на фиг. 6D, фиг. 6E, фиг. 6F и фиг. 6G, в каждой из веерообразных областей II, III и IV. Например, во время t1 на чертеже, позиции животного распределены от позиции (закрашенной окружности), вычисленной с использованием центральных значений Jc, Vmac и θc (наибольшие значения вероятности формирования) (Jik, Vmaik, θik), до периферии со снижающимися вероятностями qi2(t), qi3(t) и qi4(t) (на чертеже, пунктирные окружности вокруг закрашенной окружности являются контурами вероятности). По мере того, как истекает время t1->t2->t3, предполагается, что распределение позиций присутствия должно перемещаться.
[0039] В модели, описанной выше, четыре параметра (Jik, Vmaik, θik, Pik) являются значениями индекса характеристик поведения, представляющими характеристики поведения животных. Поскольку набор значений, который отличается согласно типу животных, используется для значений (Jik, Vmaik, θik, Pik) индекса характеристик поведения, распределение позиций присутствия животных и режим изменения во времени отличаются согласно типу животных (см. фиг. 10). Поскольку размер области, в которой должно присутствовать животное, обычно увеличивается во времени, как показано на чертеже, вероятность присутствия в каждой из позиций снижается.
[0040] (ii) Вычисление будущей вероятности присутствия животного и формирование ее распределения. Согласно модели перемещения животного, приведенной выше, будущая вероятность присутствия животного в определенной позиции в определенное время задается посредством Pik x pθ(θik) x pj(Jik) (или x pma(Vmaik)). Тем не менее, аналитический расчет вероятности присутствия в каждой позиции в целой плоской области около транспортного средства является затруднительным, поскольку вычисление требует огромного объема вычислений. Чтобы разрешать эту проблему, первый режим результата прогнозирования заключается в том, что в качестве репрезентативных значений будущей позиции животного и вероятности, с которой животное должно присутствовать в этой позиции, позиция с наибольшей вероятностью присутствия и вероятность присутствия в этой позиции могут вычисляться посредством рекуррентных формул (1)-(3), приведенных выше, с использованием центральных значений Jc, Vmac и θc (Jik, Vmaik, θik) для каждого шаблона поведения. Как схематично показано на фиг. 7A, позиция присутствия вычисляется посредством последовательного выполнения вычисления с использованием рекуррентных формул для каждого момента времени (t1, t2, t3...), и вероятность присутствия в каждой позиции присутствия задается посредством Pik x pθ(θik=θc) x pj(Jik=Jc) (или x pma(Vmaik=Vma)). В этом случае, в результате вычисления, будущая позиция присутствия животного перемещается вдоль линии, созданной посредством соединения закрашенных окружностей на фиг. 6H, по мере того, как истекает время. Как описано выше, поскольку pθ уменьшается по мере того, как расстояние от первой позиции становится большим по мере того, как истекает время, вероятность присутствия в каждой позиции присутствия уменьшается.
[0041] В другом режиме результата прогнозирования (втором режиме), случайные числа согласно вероятности формирования каждого из (Jik, Vmaik, θik) подставляются в вышеописанные рекуррентные формулы (1)-(3), чтобы вычислять множество будущих позиций присутствия животного в каждый момент времени, и после этого, распределение вероятностей присутствия, полученных посредством сбора частот присутствия животных в плоской области около транспортного средства, может формироваться в качестве результата прогнозирования. Более конкретно, в качестве значений (Jik, Vmaik, θik), случайные числа сначала формируются согласно каждой вероятности формирования, как описано выше, и после этого сформированные случайные числа подставляются в рекуррентные формулы (1)-(3), приведенные выше, чтобы вычислять будущие позиции присутствия животного в каждый момент времени. За счет этого, множество позиций присутствия животного в определенное время t в плоской области около транспортного средства могут быть нанесены на график, как схематично показано на фиг. 7B. Следовательно, частота присутствия (число графиков) может вычисляться для каждой небольшой области, полученной посредством секционирования плоской области около транспортного средства на области, каждая из которых имеет предварительно определенную ширину. После этого, посредством деления частот присутствия в каждой небольшой области на общее число частот присутствия, вероятность p присутствия в каждой небольшой области вычисляется так, как схематично показано на фиг. 7C. Помимо этого, посредством умножения вероятности присутствия на вероятность, с которой выбирается (Jik, Vmaik, θik), т.е. посредством вероятности Pik формирования шаблона k поведения, формируется распределение вероятностей присутствия животного во время t. В этом случае, задается вероятность присутствия животного для каждой небольшой области плоской области около транспортного средства, и как схематично показано на фиг. 7D, распределение будущих вероятностей присутствия в каждый момент времени формируется около животного (на чертеже, пунктирная линия является контурной линией вероятности присутствия). Помимо этого, посредством формирования распределения будущих вероятностей присутствия на основе временных рядов, изменение распределения будущей вероятности присутствия во времени может прогнозироваться, как показано на фиг. 7E (пунктирная линия является контурной линией определенной вероятности).
[0042] (iii) Процесс обработки. Снова ссылаясь на блок-схему последовательности операций способа на фиг. 3, описывается фактическая обработка. Во-первых, согласно определенному типу животных, значения (Jik, Vmaik, θik, Pik) индекса характеристик поведения, описанные выше, выбираются из группы данных из значений индекса характеристик поведения, которая сохраняется в запоминающем устройстве заранее, и которая представляет характеристики поведения типов животных, предположительно вышедших на проезжую дорогу транспортного средства (фиг. 3: этап 50). Фиг. 8 показывает, в табличной форме, группу данных из резкого изменения скорости, максимальной скорости, углового смещения и вероятности формирования, сохраненную в запоминающем устройстве. Как следует понимать из чертежа, группа данных из значений индекса характеристик поведения включает в себя данные по резкому изменению Jik скорости, максимальной скорости Vmaik, угловому смещению θik и вероятности Pik формирования для каждого возможного режима поведения для каждого из различных типов животных. Когда тип животного, обнаруженного в изображении, идентифицируется, выбирается весь набор значений индекса характеристик поведения типа. Например, если тип животных является оленем, выбирается вся группа данных оленя. С этой точки зрения, в конфигурации, в которой позиция с наибольшей вероятностью присутствия и вероятность присутствия в этой позиции вычисляются в каждый момент времени в качестве результата прогнозирования (первый режим), выбирается центральное значение каждого из резкого изменения Jik скорости, максимальной скорости Vmaik и углового смещения θik (Следовательно, в конфигурации, в которой выполняется только прогнозирование в первом режиме, группа данных, сохраненная в запоминающем устройстве, должна включать в себя только центральные значения этих параметров). В конфигурации, в которой формируется распределение вероятностей присутствия в каждый момент времени (второй режим), значения случайных чисел, заданные согласно каждой вероятности формирования, выбираются для резкого изменения Jik скорости, максимальной скорости Vmaik и углового смещения θik. Группа данных из резкого изменения скорости, максимальной скорости, углового смещения и вероятности формирования, сохраненная в запоминающем устройстве, может представлять собой данные, собранные заранее посредством теста на основе наблюдений различных животных.
[0043] После этого, для каждого из выбранных шаблонов поведения, позиция с наибольшей вероятностью присутствия и вероятность присутствия в этой позиции в каждый момент времени вычисляются с использованием рекуррентных формул (1)-(3), приведенных выше (первого режима), или распределение вероятностей присутствия в каждый момент времени формируется (второй режим) (этап 52). То, какой результат прогнозирования должен вычисляться или формироваться, в первом режиме или во втором режиме, может надлежащим образом выбираться посредством разработчика устройства. Обработка определения вероятности столкновения, которая описывается ниже, отличается согласно тому, какой режим выбирается. Диапазон времени прогнозирования (последний раз в сутках, когда выполняется прогнозирование) может задаваться надлежащим образом.
[0044] Когда множество животных обнаруживается около транспортного средства, как показано на фиг. 5C, результат прогнозирования в первом или втором режиме может вычисляться или формироваться отдельно для каждого животного. В этом случае, поскольку индекс предоставляется для каждого из множества животных, как описано выше, позиция с наибольшей вероятностью присутствия и вероятность присутствия в этой позиции в каждый момент времени вычисляются (первый режим), или распределение вероятностей присутствия в каждый момент времени формируется (второй режим) для каждого индекса. С этой точки зрения, для некоторого типа животного, шаблон поведения или характеристики поведения могут отличаться между временем, когда животное ведет себя в качестве отдельной особи, и временем, когда животное принадлежит группе (см. фиг. 10D и фиг. 10E). Следовательно, когда животные формируют группу при вычислении будущей вероятности присутствия животного с использованием рекуррентных формул (1)-(3), приведенных выше, или формировании ее распределения, значения для каждого типа животных, которые используются, когда животные формируют группу, выбираются для набора значений индекса характеристик поведения, как показано в нижней части фиг. 8.
[0045] (2) Прогнозирование будущей области присутствия транспортного средства. После того, как будущая область присутствия животного прогнозируется таким способом, прогнозируется будущая область присутствия транспортного средства (фиг. 3: этап 54). Типично, будущая позиция присутствия транспортного средства может оцениваться надлежащим образом с использованием значений индекса, представляющих состояние движения транспортного средства, таких как текущая скорость транспортного средства, ускорение, угол поворота при рулении или скорость относительно вертикальной оси транспортного средства. Проще всего результат прогнозирования может вычисляться из значений индекса, в которых позиция транспортного средства или траектория в каждый момент времени представляют состояние движения транспортного средства. Тем не менее, поскольку водитель может выполнять операцию ускорения/замедления или операцию руления на практике, будущая позиция присутствия транспортного средства и ее вероятность присутствия могут вычисляться, или ее распределение может формироваться с использованием следующих рекуррентных формул (4)-(6), аналогичных рекуррентным формулам (1)-(3), описанным выше. Xv(tn+1)=Xv(tn)+Vv(tn+1)*cosθv*Δt... (4), Yv(tn+1)=Yv(tn)+Vv(tn+1)*sinθv*Δt... (5), Vv(tn+1)=min{Vv(tn)+Jv, Vmav}... (6), где Xv(tn), Yv(tn) и Vv(tn) являются позицией присутствия транспортного средства во время tn (значения координат в системе координат с текущей позицией транспортного средства в качестве начала координат и с направлением движения транспортного средства в направлении по оси X) и скоростью, соответственно; θv является будущим направлением движения транспортного средства, и его значение предположительно может формироваться с направлением движения транспортного средства, вычисленным из текущего угла поворота при рулении, в качестве центрального значения и с вероятностью формирования на основе колоколообразного распределения, показанного на фиг. 6D (Ширина распределения отличается от ширины распределения для животного). Резкое изменение Jv скорости является изменением скорости, когда управление ускорением/замедлением выполняется водителем (или системой управления приведением в движение), и его значение может предполагаться как формируемое с вероятностью формирования на основе колоколообразного распределения, показанного на фиг. 6F, при этом увеличение скорости в единицу времени, которое вычисляется из текущего значения ускорения/замедления, является центральным значением. Vmav является максимальной скоростью транспортного средства.
[0046] В первом режиме, результат прогнозирования будущей области присутствия транспортного средства получается таким же образом, как для животного, и как схематично показано на фиг. 9A. Иными словами, в качестве репрезентативных значений будущей позиции транспортного средства и вероятности, с которой транспортное средство должно присутствовать в этой позиции, позиция с наибольшей вероятностью присутствия и вероятность присутствия в этой позиции могут вычисляться посредством рекуррентных формул (4)-(6), приведенных выше, с использованием центральных значений Jv и θv в каждый момент времени (t1, t2,...,). Во втором режиме, как и в случае животного, случайные числа согласно каждой вероятности формирования формируются в качестве Jv и θv, и сформированные случайные числа подставляются в рекуррентные формулы (4)-(6), чтобы вычислять будущее присутствие транспортного средства в каждый момент времени. После этого, вычисляется частота присутствия (число графиков) в каждой небольшой области, полученной посредством секционирования плоской области около транспортного средства на области с предварительно определенной шириной, вычисляется вероятность p присутствия каждой небольшой области, и как показано на фиг. 9B, распределение будущих вероятностей (Pv1, Pv2,...,) присутствия формируется для каждого момента времени. Как результат, изменение распределения будущих вероятностей присутствия (t1, t2, t3,...,) получается так, как показано на фиг. 9C. Диапазон времени прогнозирования (последний раз в сутках, когда выполняется прогнозирование) может задаваться надлежащим образом.
[0047] (3) Определение вероятности столкновения между транспортным средством и животным. После того, как будущие области присутствия животного и транспортного средства прогнозируются таким способом, эти результаты прогнозирования используются для того, чтобы определять то, имеется или нет вероятность столкновения, при котором животное сталкивается с транспортным средством (фиг. 3: этап 56).
[0048] Если результаты прогнозирования будущих областей присутствия животного и транспортного средства получаются в первом режиме, т.е. если вычисляются позиция с наибольшей вероятностью присутствия каждого из животного и транспортного средства в каждый момент времени и вероятность присутствия в этой позиции, в каждый момент времени определяется то, находятся или нет прогнозная позиция присутствия животного (позиция с наибольшей вероятностью присутствия в каждом шаблоне поведения) и прогнозная позиция присутствия транспортного средства (позиция с наибольшей вероятностью присутствия) в диапазоне предварительно определенного расстояния L, как схематично показано на фиг. 9A. Если прогнозная позиция присутствия животного и прогнозная позиция присутствия транспортного средства присутствуют в диапазоне предварительно определенного расстояния L, возможная вероятность Pc столкновения вычисляется с использованием вероятности Pa присутствия прогнозной позиции присутствия животного и вероятности Pv присутствия прогнозной позиции присутствия транспортного средства. Pc=Pa x Pv... (7). Если возможная вероятность Pc столкновения выше предварительно определенного значения Pco, т.е. если Pc>Pco... (8) удовлетворяется, может быть определено то, что имеется вероятность столкновения между животным и транспортным средством с учетом того, что имеется высокая вероятность того, что и животное и транспортное средство присутствуют одновременно. Предварительно определенное расстояние L и предварительно определенное значение Pco могут надлежащим образом задаваться на экспериментальной или теоретической основе. В примере на фиг. 9A, определяется то, что отсутствует вероятность столкновения во время t1, поскольку прогнозная позиция присутствия животного не присутствует в окружности радиуса L в прогнозной позиции присутствия транспортного средства. С другой стороны, поскольку прогнозная позиция присутствия животного присутствует в окружности радиуса L в прогнозной позиции присутствия транспортного средства во время t2, возможная вероятность Pc столкновения вычисляется посредством формулы (7) посредством обращения к вероятностям Pa и Pv присутствия в соответствующих позициях. Если формула (8) удовлетворяется, определяется то, что имеется вероятность столкновения. Как следует понимать из описания способа для определения вероятности присутствия, описанного выше, чем больше расстояние между текущей позицией и прогнозной позицией присутствия, тем ниже вероятности Pa и Pv присутствия. Следовательно, когда прогнозная позиция присутствия животного находится близко к текущей позиции и присутствует в окружности радиуса L в прогнозной позиции присутствия транспортного средства, легко определяется то, что имеется вероятность столкновения. С другой стороны, когда прогнозная позиция присутствия животного является удаленной от текущей позиции и присутствует в окружности радиуса L в прогнозной позиции присутствия транспортного средства, не определяется легко то, что имеется вероятность столкновения.
[0049] Если результаты прогнозирования будущих областей присутствия животного и транспортного средства получаются во втором режиме, т.е. если получаются распределения вероятностей присутствия животного и транспортного средства в каждый момент времени, т.е. вероятности pa(x, y) и pv(x, y) присутствия в каждой небольшой области, созданной посредством секционирования плоской области около транспортного средства на области, каждая из которых имеет предварительно определенную ширину, вероятность pc, с которой присутствуют как животное, так и транспортное средство, вычисляется для каждой небольшой области в каждый момент времени посредством выполнения умножения между вероятностью pa(x, y) присутствия животного и вероятностью pv(x, y) присутствия транспортного средства, т.е. вычисляется формула pc(x, y)=pa(x, y) x pv(x, y)... (9). Помимо этого, возможная вероятность Pc столкновения вычисляется посредством вычисления интегрированного значения вероятности pc, с которой как животное, так и транспортное средство присутствуют в каждой небольшой области, т.е. вычисляется формула Pc=∑pc(x, y)... (10). После этого, аналогично формуле (8), приведенной выше, если возможная вероятность Pc столкновения выше предварительно определенного значения Pco, может быть определено то, что имеется вероятность столкновения. Это вычисление может выполняться только в области, в которой значения вероятности присутствия как животного, так и транспортного средства являются значительными (выполнение вычисления таким способом ограничивает области, по которым требуется анализ, и значительно уменьшает объем вычислений по сравнению с тем, когда анализируется вся область). Фиг. 9B и фиг. 9C являются схемами, схематично показывающими примеры распределения вероятностей присутствия между животным и транспортным средством в каждый момент времени, полученных согласно второму режиму. Во-первых, ссылаясь на фиг. 9B, возможная вероятность Pc столкновения в определенное время t является практически интегрированным значением значения умножения между вероятностью pa(x, y) присутствия животного и вероятностью pv(x, y) присутствия транспортного средства в части (заштрихованной области), в которой вероятность присутствия животного и вероятность присутствия транспортного средства являются существенными значениями. В том случае, если возможная вероятность Pc столкновения в заштрихованной области не выше предварительно определенного значения Pco в определенное время t, определяется то, что во время t отсутствует вероятность столкновения. Тем не менее, если часть (пунктирная линия), в которой вероятность присутствия животного и вероятность присутствия транспортного средства являются высокими, сдвигаются наружу, как показано на фиг. 9C, и если возможная вероятность Pc столкновения, вычисленная посредством формул (9) и (10), приведенных выше, становится выше предварительно определенного значения Pco, например, во время t3, определяется то, что имеется вероятность столкновения.
[0050] В вышеуказанной конфигурации, поскольку значения индекса характеристик поведения, которые отличаются согласно типу животных, используются при прогнозировании будущих областей присутствия животного, как описано выше, будущие прогнозные области присутствия животного (распределение вероятностей присутствия), которые отличаются согласно типу животных, получаются, как схематично показано на фиг. 10A, фиг. 10B, фиг. 1°C и фиг. 10D. Это позволяет прогнозировать то, имеется или нет область, в которой вероятность, с которой животное и транспортное средство присутствуют одновременно, является высокой, размер области, в которой вероятность является высокой, и время согласно типу животных, за счет этого обеспечивая возможность более точного определения вероятности столкновения, чем раньше. Помимо этого, в конфигурации, описанной выше, различные значения индекса характеристик поведения используются, как описано выше, согласно тому, ведет себя животное в качестве отдельной особи или принадлежит группе. На основе этих значений индекса характеристик поведения, то, имеется или нет область, в которой вероятность, с которой животное и транспортное средство присутствуют одновременно, является высокой, размер области, в которой вероятность является высокой, и время прогнозируются согласно тому, является или нет животное особью или принадлежит группе. Это позволяет более точно прогнозировать будущую область присутствия животного для типа животных, характеристики поведения которых отличаются согласно тому, ведет животное себя в качестве отдельной особи или принадлежит группе, согласно ситуации, как схематично показано на фиг. 10D и 10E, за счет этого обеспечивая возможность более точного определения вероятности столкновения. Например, в случае животного такого типа, который быстро отдаляется, когда животное присутствует в качестве отдельной особи, но не перемещается нечасто, когда животное принадлежит группе, как показано в примерах на фиг. 10D и фиг. 10E, будущая область присутствия животного прогнозируется с учетом таких характеристик поведения. Следовательно, даже для животного идентичного типа, результат определения того, имеется или нет вероятность столкновения, может отличаться согласно тому, ведет животное себя в качестве отдельной особи или принадлежит группе.
[0051] Если посредством последовательности обработки, описанной выше, определяется то, что отсутствует вероятность столкновения по всему диапазону времени от текущего времени до времени, когда выполняется прогнозирование, определяется то, что отсутствует вероятность столкновения (этап 58). С другой стороны, если посредством последовательности обработки определяется то, что имеется вероятность столкновения во время в диапазоне времени от текущего времени до времени, когда выполнено прогнозирование, выполняется один из видов помощи в предотвращении столкновений, который описывается ниже (этап 58).
[0052] Если последовательность обработки определяет то, что имеется вероятность столкновения, при котором животное, обнаруженное в изображении, будет сталкиваться с транспортным средством, выполняется помощь в предотвращении столкновений, которая описывается ниже. В этом случае, поскольку режим эффективной помощи отличается согласно типу животных, режим помощи, который должен выполняться, выбирается согласно типу обнаруженного животного (фиг. 3: этап 60). Фактическая последовательность операций помощи, которая должна выполняться, может включать в себя следующее: (i) формирование предупреждений (посредством звука/света), (ii) торможение транспортного средства для замедления или остановки транспортного средства, и (iii) руление транспортного средства для избегания животного. При выборе режима помощи, режим на основе комбинации этих операций может выбираться согласно типу животных.
[0053] Более конкретно, может выбираться любой из следующих режимов помощи. (a) Когда животное является крупным животным, и скорость перемещения является небольшой или стационарной: (i) формирование предупреждений - формирование предупреждения, (ii) торможение транспортного средства - приложение максимальной тормозной силы, (iii) руление транспортного средства - выполнение руления транспортного средства. (b) Когда животное является крупным животным, и скорость перемещения является высокой: (i) формирование предупреждений - формирование предупреждения, (ii) торможение транспортного средства - приложение средней тормозной силы, (iii) руление транспортного средства - невыполнение руления транспортного средства. (c) Когда животное является мелким животным, которое убегает от транспортного средства: (i) формирование предупреждений - формирование предупреждения, (ii) торможение транспортного средства - приложение низкой тормозной силы, (iii) руление транспортного средства - невыполнение руления транспортного средства. Абсолютная величина "средней" или "низкой" тормозной силы для торможения транспортного средства, описанного выше, может задаваться надлежащим образом на экспериментальной основе. Другие комбинации операций помощи в вышеприведенных примерах также могут использоваться с учетом характеристик поведения животных, и в этом случае, следует понимать, что эти комбинации должны быть включены в объем режима настоящего изобретения.
[0054] Когда режим помощи согласно типу животных выбирается таким способом, выполняется помощь в выбранном режиме (этап 62).
[0055] Хотя вышеприведенное описание связано с режимом настоящего изобретения, следует понимать, что множество модификаций и изменений могут легко добавляться специалистами в данной области техники, и что настоящее изобретение не ограничено только вышеприведенными вариантами осуществления.
[0056] Например, будущая область присутствия животного может прогнозироваться с использованием любого из других способов, посредством которых отражаются характеристики поведения согласно типу животных. Режим представления результата прогнозирования также может быть режимом, отличным от режима, описанного в варианте осуществления. Важный момент заключается в том, что тип животных определяется, к характеристикам поведения животных определенного типа обращаются, и будущее перемещение животного около транспортного средства прогнозируется для каждого типа животных, а также в том, что за счет этого может точно оцениваться область присутствия или очень вероятная область животного. Режим помощи в предотвращении столкновений может быть режимом, отличным от режимов, показанных в примерах. Важный момент заключается в том, что посредством определения типа животных, точная помощь в предотвращении столкновений может предоставляться согласно типу.
Реферат
Изобретение относится к технологии помощи предотвращения столкновения для транспортного средства. Устройство работает следующим образом. Получает изображение пространства около транспортного средства, затем на изображении обнаруживает присутствие или отсутствие четвероногих животных, если животные присутствуют, то блок определения типов четвероногих животных сопоставляет обнаруженных животных с заранее заданным шаблоном различных животных и определяет совпадение захваченных камерой животных с шаблоном. На основании индекса характеристик животных прогнозирует область присутствия четвероногих животных. На основании результата присутствия четвероного животного определяет вероятность столкновения с транспортным средством. Если имеется вероятность столкновения, то блок выполнения обработки помощи осуществляет обработку помощи для предотвращения столкновения. Обеспечивается помощь в предотвращении столкновений с помощью более точной оценки будущей области присутствия животного на основе характеристик поведения типа и определения вероятности столкновения. 8 з.п. ф-лы, 10 ил.
Комментарии