Печатающее устройство и способ управления им - RU2655243C1
Код документа: RU2655243C1
Чертежи








Описание
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к печатающему устройству и способу управления этим печатающим устройством, а конкретнее - к печатающему устройству для транспортировки листов в область печати, обращенную к печатающей головке, путем осуществления операции коррекции перекоса передней кромки последующего листа, когда часть последующего листа перекрывает часть предыдущего листа.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
В выложенном патенте Японии № 2000-15881 описано печатающее устройство для управления таким образом, чтобы перекрывать граничную область передней кромки последующего листа с граничной областью задней кромки предыдущего листа, содержащее средство подачи для отделения и подачи множества листов одного за другим, средство печати для формирования изображения на листе, средство транспортировки для транспортировки листа к средству печати, средство обнаружения для обнаружения листа, и средство управления для управления приводом средства подачи в соответствии с сигналом средства обнаружения.
Однако устройство, описанное в выложенном патенте Японии № 2000-15881, может начинать подачу последующего листа только тогда, когда предельный параметр задней кромки предыдущего листа и предельный параметр передней кромки последующего листа подтверждены до начала подачи последующего листа. Это создает техническую проблему, заключающуюся в том что, до начала подачи последующего листа проходит некоторое время.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Данное изобретение сделано с учетом вышеупомянутой проблемы, и обеспечивает печатающее устройство, выполненное с возможностью начала подачи последующего листа даже если предельный параметр задней кромки предыдущего листа и предельный параметр передней кромки последующего листа не подтверждены, и способ управления этим печатающим устройством.
Чтобы решить вышеупомянутую проблему, в данном изобретении предложено печатающее устройство, содержащее: подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопку на блоке укладки в стопку; транспортирующий валик, выполненный с возможностью транспортировки листа для печати, подаваемого подающим валиком; печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком; блок управления транспортировкой, выполненный с возможностью управления транспортировкой листов для печати таким образом, что задняя кромка предыдущего листа в качестве листа для печати, ранее поданного из блока укладки в стопку, и передняя кромка последующего листа в качестве листа для печати, впоследствии поданного из блока укладки в стопку, перекрывают друг друга; и блок коррекции перекоса, выполненный с возможностью осуществления коррекции перекоса последующего листа, когда последующий лист перекрывает предыдущий лист, с помощью блока управления транспортировкой, при этом блок коррекции перекоса заставляет переднюю кромку последующего листа упираться в транспортирующий валик в течении времени от окончания операции подачи транспортирующим валиком для печати последней строки на предыдущем листе с помощью печатающего блока до начала следующей операции транспортировки.
Чтобы решить вышеупомянутую проблему, в данном изобретении предложен способ управления печатающим устройством, имеющим подающий валик, выполненный с возможностью подачи листа для печати, уложенного в стопку на блоке укладки в стопку, транспортирующий валик, выполненный с возможностью транспортировки листа для печати, подаваемого подающим валиком, и печатающий блок, выполненный с возможностью печати на листе для печати, транспортируемом транспортирующим валиком, причем способ включает в себя: этап управления транспортировкой, обеспечивающий возможность управления транспортировкой листов для печати таким образом, что задняя кромка предыдущего листа в качестве листа для печати, ранее поданного из блока укладки в стопку, и передняя кромка последующего листа в качестве листа для печати, впоследствии поданного из блока укладки в стопку, перекрывают друг друга; и этап коррекции перекоса для осуществления коррекции перекоса последующего листа, когда последующий лист перекрывает предыдущий лист, на этапе управления транспортировкой, при этом на этапе коррекции перекоса переднюю кромку последующего листа заставляют упираться в транспортирующий валик в течение времени от окончания операции подачи транспортирующим валиком для печати последней строки на предыдущем листе с помощью печатающего блока до начала следующей операции транспортировки.
В соответствии с данным изобретением, можно обеспечить печатающее устройство, выполненное с возможностью начинать подачу последующего листа даже если предельный параметр задней кромки предыдущего листа и предельный параметр передней кромки последующего листа не подтверждены.
Дополнительные признаки данного изобретения станут очевидными из нижеследующего описания возможных вариантов осуществления (приводимого со ссылками на прилагаемые чертежи).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
на фиг. 1 представлен вид, поясняющий операцию непрерывной подачи с перекрытием в печатающем устройстве в соответствии с одним вариантом осуществления данного изобретения;
на фиг. 2 представлен вид, поясняющий операцию непрерывной подачи с перекрытием в печатающем устройстве в соответствии с одним вариантом осуществления данного изобретения;
на фиг. 3 представлен вид, поясняющий операцию непрерывной подачи с перекрытием в печатающем устройстве в соответствии с одним вариантом осуществления данного изобретения;
на фиг. 4A и 4B представлены виды, поясняющие расположение валика захвата;
на фиг. 5 представлена блок-схема, где показано печатающее устройство в соответствии с одним вариантом осуществления;
на фиг. 6А и 6В представлены блок-схемы, иллюстрирующие операцию непрерывной подачи с перекрытием в соответствии с одним вариантом осуществления;
на фиг. 7 представлен вид, поясняющий операцию осуществления перекрытия предыдущего листа последующим листом;
на фиг. 8 представлены вид, поясняющий операцию осуществления перекрытия предыдущего листа последующим листом;
на фиг. 9 представлена блок-схема для пояснения операции коррекции перекоса последующего листа в соответствии с одним вариантом осуществления; и
на фиг. 10 представлена блок-схема для пояснения операции вычисления положения передней кромки последующего листа.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже приводится описание вариантов осуществления данного изобретения со ссылками на прилагаемые чертежи.
На фиг. 1-3 представлены сечения, каждое из которых схематически иллюстрирует периферийный участок пути транспортировки для пояснения операции непрерывной подачи с перекрытием в печатающем устройстве в соответствии с одним вариантом осуществления данного изобретения. Сначала, со ссылками на вид ST1 согласно фиг. 1, будет описана схематическая компоновка печатающего устройства в соответствии с вариантом осуществления.
Позиция 1 на виде ST1 согласно фиг. 1 обозначает листы для печати. Множество листов 1 для печати уложены в стопку на подающем лотке 11 (блок укладки стопкой). Валик 2 захвата упирается в верхний лист 1 для печати, уложенный стопкой на подающем лотке 11, чтобы захватить этот лист. Подающий валик 3 подает лист 1 для печати, захваченный валиком 2 захвата, на сторону, находящуюся дальше по ходу в направлении транспортировки листа. К подающему валику 3 смещен подающий приводной валик 4, чтобы помещать посередине лист 1 для печати вместе с подающим валиком 3, в результате чего происходит подача листа 1 для печати.
Транспортирующий валик 5 транспортирует лист 1 для печати, подаваемый подающим валиком 3 и подающим приводным валиком 4 в положение, где лист обращен к печатающей головке 7. К транспортирующему валику 5 смещен прижимной валик 6, чтобы помещать посередине лист для печати вместе с подающим валиком 3, в результате чего и происходит дальнейшая подача листа для печати.
Печатающая головка 7 осуществляет печать на листе 1 для печати, транспортируемом транспортирующим валиком 5 и прижимным валиком 6. В этом варианте осуществления, в качестве примера можно привести печатающую головку для струйной печати, которая осуществляет печать на листе 1 для печати за счет выбрасывания чернил из печатающей головки. Бумагоопорный валик 8 поддерживает обратную поверхность листа 1 для печати в положении, где этот лист обращен к печатающей головке 7. Печатающая головка 7 установлена на каретке 10, которая перемещается в направлении, пересекающем направление транспортировки листа.
Выводной валик 9 выводит лист для печати, на котором осуществила печать печатающая головка 7, наружу из устройства. Прямозубые зубчатые колеса 12 и 13 вращаются, находясь в контакте с отпечатанной поверхностью листа для печати, на котором осуществила печать печатающая головка 7. Прямозубое зубчатое колесо 13 на находящейся дальше по ходу стороне смещено к выводящему валику 9, а в положении, обращенном к прямозубому зубчатому колесу 12 на находящейся впереди по ходу стороне, выводящий валик 9 отсутствует. Прямозубое зубчатое колесо 12 используется для предотвращения всплывания листа 1 для печати, и оно также именуется нажимным прямозубым зубчатым колесом.
Направляющая 15 транспортировки направляет лист 1 для печати между участком зажима при подаче, образованным подающим валиком 3 и подающим приводным валиком 4, и участком зажима при транспортировке, образованным транспортирующим валиком 5 и прижимным валиком 6. Датчик 16 обнаружения листа обнаруживает переднюю кромку и заднюю кромку листа 1 для печати. Датчик 16 обнаружения листа предусмотрен дальше по ходу от подающего валика 3 в направлении подачи листов. Рычаг 17 прижима листов обеспечивает перекрытие передней кромкой последующего листа задней кромки предыдущего листа. Рычаг 17 прижима листов отклоняется пружиной, расположенной вокруг вращающегося вала 17b, в направлении против часовой стрелки, как показано на фиг. 1.
на фиг. 4A и 4B представлены виды, поясняющие расположение валика 2 захвата. Как описано выше, валик 2 захвата упирается в верхний лист для печати, уложенный в стопку на подающем лотке 11, чтобы захватить этот лист. Приводной вал 19 передает движущую силу двигателя подачи (описываемого ниже) валику 2 захвата. При захвате листа для печати, приводной вал 19 и валик 2 захвата вращаются в направлении, указанном стрелкой A на фиг. 4A и 4B. На приводном валу 19 выполнен выступ 19a. В валике 2 захвата выполнен участок 2c впадины, на который сажают выступ 19a. Как показано на фиг. 4A, когда выступ 19a упирается в первую поверхность 2a участка 2с впадины валика 2 захвата, движущая сила приводного вала 19 передается валику 2 захвата. В этом случае, когда приводной вал 19 приводится в движение, валик 2 захвата также вращается. С другой стороны, как показано на фиг. 4B, когда выступ 19a упирается во вторую поверхность 2b участка 2с впадины валика 2 захвата, движущая сила приводного вала 19 не передается валику 2 захвата. В этом случае, даже если приводной вал 19 приводится в движение, валик 2 захвата не вращается. Кроме того, когда выступ 19a выполнен между первой поверхностью 2a и второй поверхностью 2b не упирающимся в первую поверхность 2a или вторую поверхность 2b, даже если приводной вал 19 приводится в движение, валик 2 захвата не вращается.
На фиг. 5 представлена блок-схема, где показано печатающее устройство в соответствии с этим одним вариантом осуществления. Микропроцессорный блок (MPU) 201 управляет работой каждого блока, обработкой данных, и т.п. Как будет пояснено ниже, MPU 201 также функционирует в качестве средства управления транспортировкой, выполненного с возможностью управления транспортировкой листов для печати таким образом, что задняя кромка предыдущего листа и передняя кромка последующего листа перекрывают друг друга. Данные и программы, исполняемые MPU 201, хранятся в постоянном запоминающем устройстве (ROM) 202. Оперативное запоминающее устройство (RAM) 203 временно сохраняет данные обработки, которыми манипулирует MPU 201, и данные, принимаемые из главного компьютера 214.
Печатающей головкой 7 управляет схема возбуждения (драйвер) 207 печатающей головки. Двигателем 204 каретки для привода каретки 10 управляет схема возбуждения 208 двигателя каретки. Двигатель 205 транспортировки приводит в движение транспортирующий валик 5 и выпускной валик 9. Двигателем 205 транспортировки управляет схема возбуждения 209 двигателя транспортировки. Двигатель 206 подачи приводит в движение валик 2 захвата и подающий валик 3. Двигателем 206 подачи управляет схема возбуждения 210 двигателя подачи.
Для осуществления связи с печатающим устройством посредством сбора информации о печати, такой, как печатаемое изображение и качество печатаемого изображения, когда пользователь предписывает исполнение процесса печати, в главном компьютере 214 используется драйвер 2141 принтера. MPU 201 осуществляет обмен печатаемым изображением и т.п. с главным компьютером 214 через блок 313 интерфейса.
Операция непрерывной подачи с перекрытием буден описана во временной последовательности со ссылками на показанные виды, начиная с ST1 согласно фиг. 1 и кончая ST9 согласно фиг. 3. Когда главный компьютер 214 передает данные печати через блок 213 интерфейса, MPU 201 обрабатывает данные печати, затем загружаемые в RAM 203. MPU 201 начинает операцию печати на основании загруженных данных.
Теперь будет описан вид ST1 согласно фиг. 1. Схема возбуждения 210 двигателя подачи осуществляет возбуждение двигателя 206 подачи так, чтобы тот вращался с низкой скоростью. Это обуславливает вращение валика 2 захвата (первого подающего валика) со скоростью 7,6 дюйма в секунду (19,3 см/с). Когда валик 2 захвата вращается, происходит захват верхнего листа для печати (предыдущего листа 1-A), уложенного в стопку на подающем лотке 11. Предыдущий лист 1-A, захваченный валиком 2 захвата, транспортируется подающим валиком 3 (вторым подающим валиком) в таком же направлении, в каком он транспортируется валиком 2 захвата. Двигатель 206 подачи также приводит в движение подающий валик 3. Этот вариант осуществления будет описан на примере компоновки, включающей в себя валик 2 захвата и подающий валик 3. Однако можно позаимствовать и компоновку, включающую в себя только подающий валик с целью подачи листа для печати, уложенного в стопку на блоке укладки в стопку.
Когда датчик 16 обнаружения листа, предусмотренный на стороне, находящейся дальше по ходу от подающего валика 3, обнаруживает переднюю кромку предыдущего листа 1-A, двигатель 206 подач переключается на приведение в действие с высокой скоростью. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 20 дюймов в секунду (50,8 см/с).
Теперь будет описан вид ST2 согласно фиг. 1. Когда подающий валик 3 непрерывно вращается, передняя кромка предыдущего листа 1-A вращает рычаг 17 прижима листов вокруг вращающегося вала 17b в направлении по часовой стрелке с противодействием отклоняющей силе пружины. Когда подающий валик 3 продолжает непрерывное вращение, передняя кромка предыдущего листа 1-A упирается в участок зажима при транспортировке, образованный транспортирующим валиком 5 и прижимным валиком 6. В этот момент, транспортирующий валик 5 останавливается. Обеспечивая дальнейшее вращение подающего валика 3 в соответствии с заранее определенным параметром после того, как передняя кромка предыдущего листа 1-A упирается в участок зажима при транспортировке, осуществляют выравнивание предыдущего листа 1-A для коррекции перекоса, когда передняя кромка предыдущего листа 1-A упирается в участок зажима при транспортировке.
Теперь будет описан вид ST3 согласно фиг. 1. По окончании операции коррекции перекоса предыдущего листа 1-A, осуществляется возбуждение двигателя 205 транспортировки с тем, чтобы начать вращение транспортирующего валика 5. Транспортирующий валик 5 транспортирует лист со скоростью 15 дюймов в секунду (38,1 см/с). После выравнивания предыдущего листа 1-A с положением, в котором он обращен к печатающей головке 7, осуществляется операция печати за счет выбрасывания чернил из печатающей головки 7 на основании данных печати. Отметим, что операцию выравнивания проводят, упирая переднюю кромку листа для печати в участок зажима при транспортировке, чтобы временно позиционировать лист для печати в положении, где он обращен к транспортирующему валику 5, и управляя параметром вращения транспортирующего валика 5 в соответствии с положением транспортирующего валика 5.
Печатающее устройство согласно этому варианту осуществления является серийно выпускаемым печатающим устройством, в котором печатающая головка 7 установлена на каретке 10. Операцию печати на листе для печати проводят, повторяя операцию транспортировки в процессе прерывистой транспортировки листа для печати в соответствии с заранее определенным параметром с помощью транспортирующего валика 5 и операцию формирования изображения за счет выбрасывания чернил из печатающей головки 7 во время перемещения каретки 10 с установленной на ней печатающей головкой 7, когда транспортирующий валик 5 остановлен.
Когда проводят выравнивание предыдущего листа 1-A, двигатель 206 подачи переключают на приведение в действие с низкой скоростью. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 7,6 дюйма в секунду (19,3 см/с). Когда транспортирующий валик 5 осуществляет прерывистую подачу листа для печати в соответствии с заранее определенным параметром, двигатель 206 подачи также осуществляет прерывистое приведение подающего валика 3 в движение. То есть, когда транспортирующий валик 5 вращается, подающий валик 3 тоже вращается. Когда транспортирующий валик 5 останавливается, подающий валик 3 тоже останавливается. Скорость вращения подающего валика 3 ниже, чем скорость вращения транспортирующего валика 5. Вследствие этого, лист растягивается между транспортирующим валиком 5 и подающим валиком 3. Подающий валик 3 вращается одновременно с транспортировкой листа для печати транспортирующим валиком 5.
Поскольку осуществляется прерывистое приведение в действие двигателя 206 подачи, приводной вал 19 тоже приводится в движение. Как описано выше, скорость вращения валика 2 захвата ниже, чем скорость вращения транспортирующего валика 5. Вследствие этого, валик 2 захвата вращается одновременно с транспортировкой листа для печати транспортирующим валиком 5. То есть, валик 2 захвата вращается, опережая приводной вал 19. Конкретнее, выступ 19a приводного вала 19 отстоит от первой поверхности 2a и упирается во вторую поверхность 2b. Следовательно, второй лист для печати (последующий лист 1-B) не захватывается вскоре после того, как задняя кромка предыдущего листа 1-A проходит через валик 2 захвата. После приведения приводного вала 19 в движение в течение заранее определенного времени, выступ 19a упирается в первую поверхность 2a, а валик 2 захвата начинает вращаться.
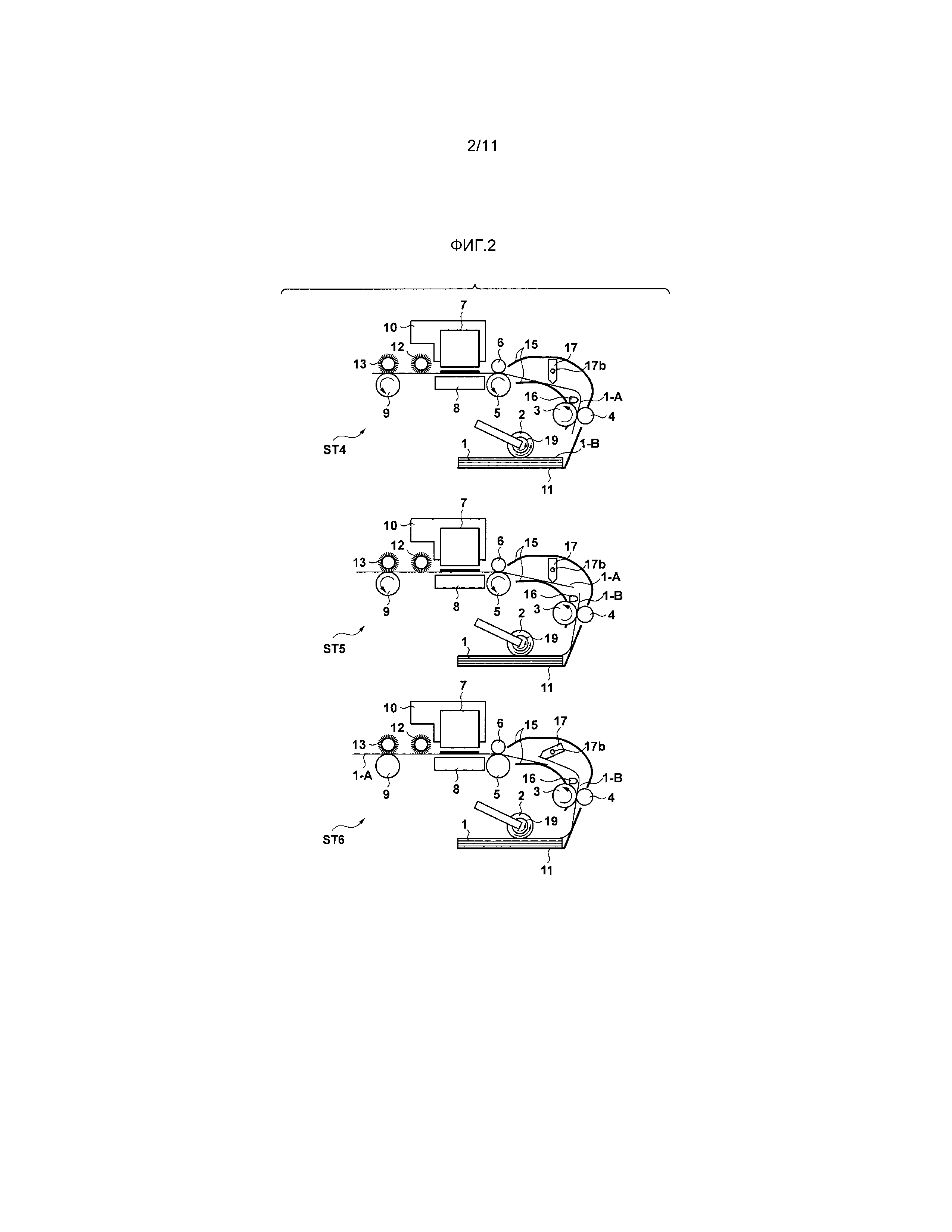
Теперь будет описан вид ST4 согласно фиг. 2. На виде ST4 показано состояние, в котором валик 2 захвата начинает вращаться и захватывает последующий лист 1-B. Ввиду такого фактора, как быстрота реакции датчика, датчику 16 обнаружения листа требуется заранее определенный интервал или большее время между листами для печати, чтобы обнаруживать кромки листов для печати. То есть, необходимо, чтобы передняя кромка последующего листа 1-B была отделена от задней кромки предыдущего листа 1-A заранее определенным расстоянием, чтобы обеспечить заранее определенный интервал времени от того момента, когда датчик 16 обнаружения листа обнаруживает заднюю кромку предыдущего листа 1-A, до того момента, когда он обнаруживает переднюю кромку последующего листа 1-B. Чтобы достичь этого, угол θ участка 2с впадины валика 2 захвата задают составляющим примерно 70°.
Теперь будет описан вид ST5 согласно фиг. 2. Последующий лист 1-B, отделенный валиком 2 захвата, транспортируется подающим валиком 3. В это время предыдущий лист 1-A подвергается операции формирования изображения печатающей головкой 7 на основании данных печати. Когда датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, двигатель 206 подачи переключается на приведение в действие с высокой скоростью. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 20 дюймов в секунду (50,8 см/с).
Теперь будет описан вид ST6 согласно фиг. 2. Рычаг 17 прижима листов оказывает нажим вниз на заднюю кромку предыдущего листа 1-A, как показано на виде ST5 согласно фиг. 2. Можно создать состояние, в котором передняя кромка последующего листа 1-B перекрывает заднюю кромку предыдущего листа 1-A за счет перемещения последующего листа 1-B со скоростью, которая выше той, с которой предыдущий лист 1-A движется дальше по ходу перемещения за счет операции печати посредством печатающей головки 7 (вид ST6 согласно фиг. 2). Поскольку предыдущий лист 1-A подвергается операции печати на основании данных печати, происходит его прерывистая транспортировка транспортирующим валиком 5. С другой стороны, после того, как датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, последующий лист 1-B может догнать предыдущий лист 1-A за счет непрерывного вращения подающего валика 3 со скоростью 20 дюймов в секунду (50,8 см/с).
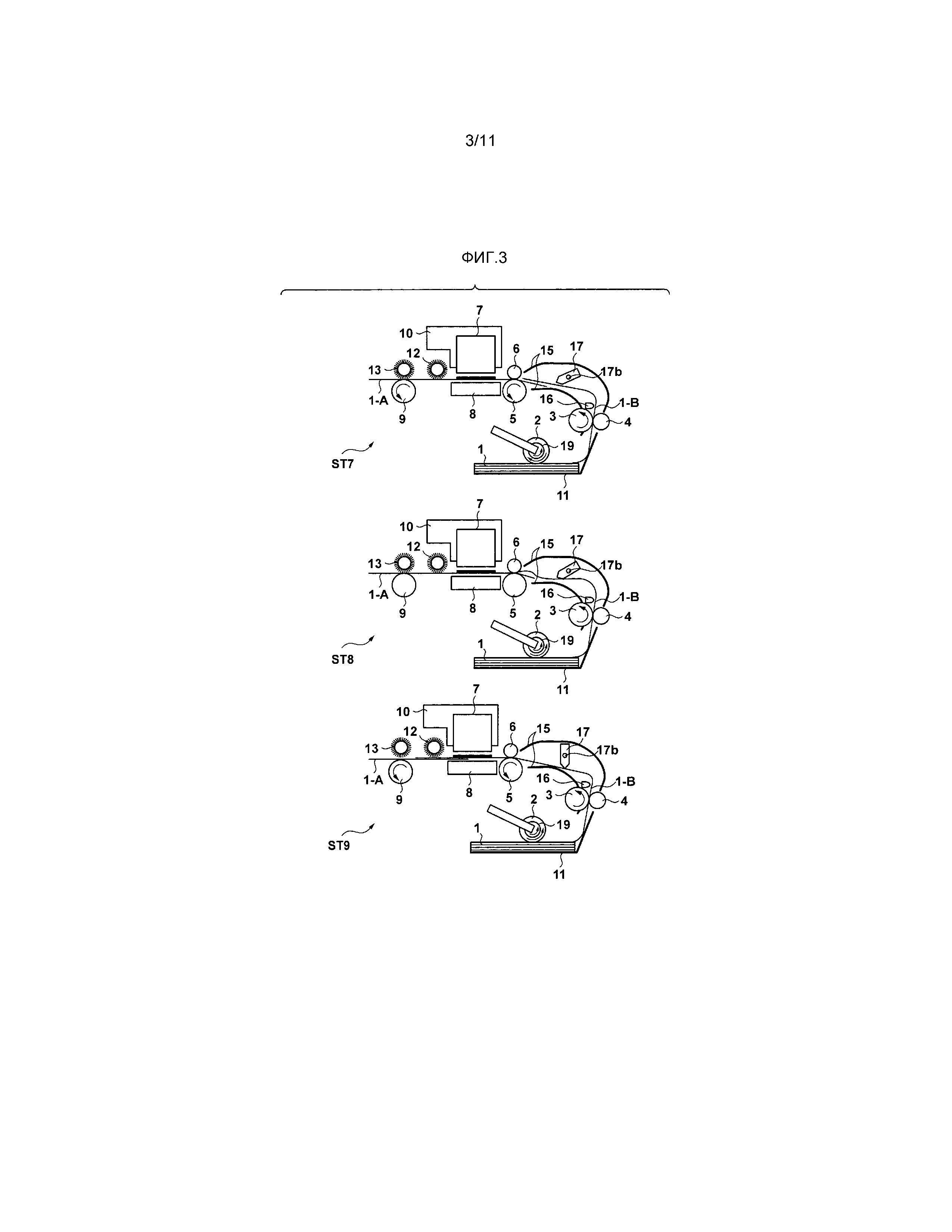
Теперь будет описан вид ST7 согласно фиг. 3. После создания состояния перекрытия, в котором передняя кромка последующего листа 1-B перекрывает заднюю кромку предыдущего листа 1-A, последующий лист 1-B транспортируется подающим валиком 3 до тех пор, пока передняя кромка последующего листа 1-B не останавливается в заранее определенном положении до достижения участка зажима при транспортировке. Положение передней кромки последующего листа 1-B вычисляется исходя из параметра вращения подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, и на основании результата вычислений осуществляется управление упомянутым положением. В это время предыдущий лист 1-A подвергается операции формирования изображения печатающей головкой 7 на основании данных печати.
Теперь будет описан вид ST8 согласно фиг. 3. Когда транспортирующий валик 5 прекращает проведение операции формирования изображения (операции выбрасывания чернил) последней строки предыдущего листа 1-A, подающий валик 3 приводится в движение, упирая переднюю кромку листа 1-B для печати в участок зажима при транспортировке и тем самым проводя операцию коррекции перекоса последующего листа 1-B.
Теперь будет описан вид ST9 согласно фиг. 3. Когда операция формирования изображения последней строки предыдущего листа 1-A заканчивается, появляется возможность осуществить выравнивание последующего листа 1-B, сохраняя состояние, в котором последующий лист 1-B перекрывает предыдущий лист 1-A, за счет вращения транспортирующего валика 5, на заранее определенную величину. Последующий лист 1-B подвергается операции печати печатающей головкой 7 на основании данных печати. Когда происходит прерывистая транспортировка последующего листа 1-B для операции печати, происходит также прерывистая транспортировка предыдущего листа 1-A, который в конце концов выводится наружу из печатающего устройства выводящим валиком 9.
Когда осуществляется выравнивание последующего листа 1-B, двигатель 206 подачи переключается на приведение в действие с низкой скоростью. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 7,6 дюймов в секунду (19,3 см/с). Если данные печати имеются даже после того, как последующий лист 1-B отпечатан, процесс возвращается к состоянию, показанному на виде ST4 согласно фиг. 2, чтобы захватить третий лист для печати.
На фиг. 6А и 6В представлены блок-схемы, иллюстрирующие операцию непрерывной подачи с перекрытием в соответствии с этим вариантом осуществления. На этапе S1, когда главный компьютер 214 передает данные печати через блок 213 интерфейса, начинают операцию печати. На этапе S2 начинают операцию подачи предыдущего листа 1-A. Конкретнее, приводят в действие двигатель 206 подачи с низкой скоростью. Валик 2 захвата вращается со скоростью 7,6 дюймов в секунду (19,3 см/с). Валик 2 захвата захватывает предыдущий лист 1-A, а подающий валик 3 подает предыдущий лист 1-A к печатающей головке 7.
На этапе S3, датчик 16 обнаружения листа обнаруживает переднюю кромку предыдущего листа 1-A. Когда датчик 16 обнаружения листа обнаруживает переднюю кромку предыдущего листа 1-A, двигатель 206 подачи переключают на приведение в действие с высокой скоростью на этапе S4. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 20 дюймов в секунду (50,8 см/с). На этапе S5, за счет управления параметром вращения подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает переднюю кромку предыдущего листа 1-A, передняя кромка предыдущего листа 1-A упирается в участок зажима при транспортировке для осуществления операции коррекции перекоса предыдущего листа 1-A.
На этапе S6 проводят выравнивание предыдущего листа 1-A на основании данных печати. То есть, предыдущий лист 1-A транспортируют в положение начала печати с учетом положения транспортирующего валика 5 на основании данных печати за счет управления параметром вращения транспортирующего валика 5. На этапе S7, двигатель 206 подачи переключают на приведение в действие с низкой скоростью. На этапе S8 начинают операцию печати, когда печатающая головка 7 выбрасывает чернила на предыдущий лист 1-A. Конкретнее, операцию печати на предыдущем листе 1-A проводят, повторяя операцию транспортировки в процессе прерывистой транспортировки листа 1-A транспортирующим валиком 5 и операции формирования изображения (операции выбрасывания чернил) путем выбрасывания чернил из печатающей головки 7 за счет перемещения на каретке 10. Прерывистое приведение в действие двигателя 206 подачи с низкой скоростью осуществляют синхронно с операцией прерывистой транспортировки предыдущего листа 1-A транспортирующим валиком 5. То есть, валик 2 захвата и подающий валик 3 прерывисто вращаются со скоростью 7,6 дюймов в секунду (19,3 см/с).
На этапе S9 определяют, имеются ли данные печати следующей страницы. Если данных печати следующей страницы нет, процесс переходит к этапу S25. По завершении операции печати предыдущего листа 1-A на этапе S25, предыдущий лист 1-A выводят на этапе S26, тем самым заканчивая операцию печати.
Если данные печати следующей страницы имеются, начинают операцию подачи последующего листа 1-B на этапе S10. Конкретнее, валик 2 захвата захватывает последующий лист 1-B, а подающий валик 3 подает последующий лист 1-B к печатающей головке 7. Валик 2 захвата вращается со скоростью 7,6 дюймов в секунду (19,3 см/с). Как описано выше, поскольку для выступа 19a приводного вала 19 предусмотрен участок 2с большой впадины валика захвата, последующий лист 1-B подается при наличии заранее определенного интервала относительно задней кромки предыдущего листа 1-A.
На этапе S11, датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B. Когда датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, двигатель 206 подачи переключают на приведение в действие с высокой скоростью на этапе S12. То есть, валик 2 захвата и подающий валик 3 вращаются со скоростью 20 дюймов в секунду (50,8 см/с). На этапе S13, за счет управления параметром вращения подающего валика 3 после того, как датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, транспортировка последующего листа 1-B происходит так, что его передняя кромка оказывается в положении, находящемся перед участком зажима при транспортировке на расстоянии, имеющем заранее определенную величину. Происходит прерывистая транспортировка предыдущего листа 1-A на основании данных печати. Непрерывное приведение в действие двигателя 206 подачи с высокой скоростью, создает состояние перекрытия, в котором передняя кромка последующего листа 1-B перекрывает заднюю кромку предыдущего листа 1-A.
На этапе S14 определяют, удовлетворяются ли заранее определенные условия (описываемые ниже). Если заранее определенные условия удовлетворяются, то на этапе S15 определяют, началась ли операция формирования изображения последней строки предыдущего листа 1-A. Если определяют, что операция формирования изображения последней строки началась, процесс переходит к этапу S16; в противном случае, процесс предусматривает ожидание до тех пор, пока не начинается операция формирования изображения. На этапе S16 упирают переднюю кромку последующего листа 1-B в участок зажима при транспортировке, поддерживая при этом состояние перекрытия, вследствие чего оказывается возможным проведение операции коррекции перекоса последующего листа 1-B. Отметим, что параметр вращения транспортирующего валика 5 для проведения операции подачи строки для последней строки на этапе S15 задают на 5 мкм меньшим, чем когда коррекцию перекоса проводят путем исключения состояния перекрытия (описываемого ниже) с учетом параметра перемещения предыдущего листа 1-A, обуславливаемым операцией, в ходе которой упирают последующий лист 1-B в участок зажима при транспортировке. Если на этапе S17 определяют, что операция формирования изображения последней строки предыдущего листа 1-A закончилась, то на этапе S18 проводят выравнивание последующего листа 1-B, сохраняя при этом состояние перекрытия.
Если на этапе S14 определяют, что заранее определенные условия не удовлетворяются, то состояние перекрытия исключают, чтобы провести выравнивание последующего листа 1-B. Конкретнее, если на этапе S27 определяют, что операция формирования изображения последней строки предыдущего листа 1-A закончилась, то проводят операцию вывода предыдущего листа 1-A на этапе S28. Во время этой операции, возбуждение двигателя 206 подачи не проводится, и поэтому последующий лист 1-B не движется до тех пор, пока его передняя кромка находится в положении на заранее определенном расстоянии перед участком зажима при транспортировке. Поскольку происходит вывод предыдущего листа 1-A, состояние перекрытия исключается. На этапе S29 переднюю кромку последующего листа 1-B упирают в участок зажима при транспортировке, чтобы провести операцию коррекции перекоса последующего листа 1-B. На этапе S18 проводят выравнивание последующего листа 1-B.
На этапе S19, двигатель 206 подачи переключают на приведение в действие с низкой скоростью. На этапе S20 начинают операцию печати посредством выбрасывания чернил из печатающей головки 7 на последующий лист 1-B. Конкретнее, операцию печати последующего листа 1-B проводят, повторяя операцию транспортировки в процессе прерывистой транспортировки листа 1-B транспортирующим валиком 5 и операции формирования изображения (операции выбрасывания чернил) путем выбрасывания чернил из печатающей головки 7 за счет перемещения каретки 10. Прерывистое приведение в действие двигателя 206 подачи с низкой скоростью осуществляют синхронно с операцией прерывистой транспортировки последующего листа 1-B транспортирующим валиком 5. То есть, валик 2 захвата и подающий валик 3 прерывисто вращаются со скоростью 7,6 дюймов в секунду (19,3 см/с).
На этапе S21 определяют, имеются ли данные печати следующей страницы. Если данные печати следующей страницы имеются, процесс возвращается к этапу S10. Если данных печати следующей страницы нет, то при завершении операция формирования изображения последующего листа 1-B на этапе S22, проводят операцию вывода последующего листа 1-B на этапе S23, и операция печати оканчивается на этапе S24.
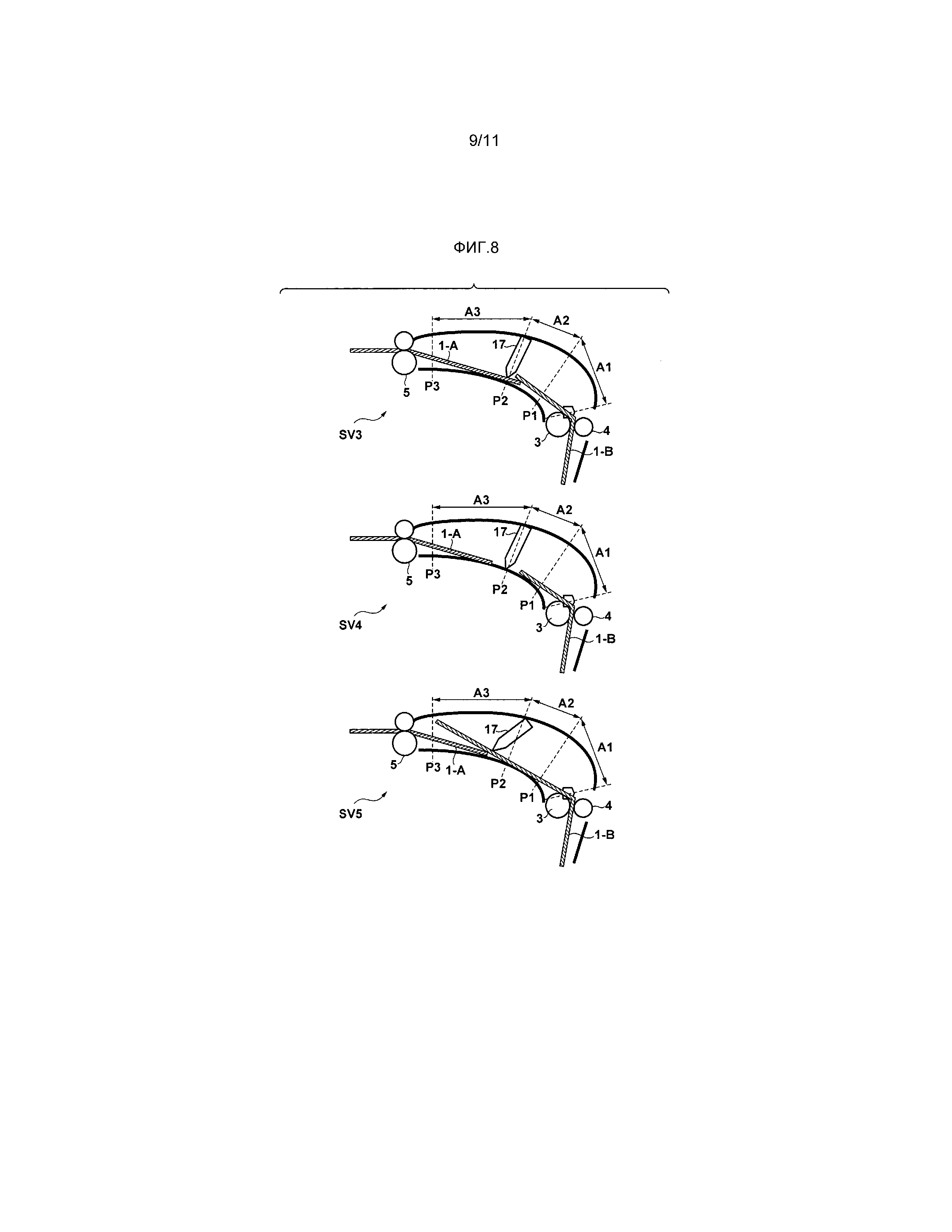
На фиг. 7 и 8 представлены виды, поясняющие операцию осуществления перекрытия предыдущего листа последующим листом в соответствии с этим вариантом осуществления. Теперь будет описана операция создания состояния перекрытия, в котором передняя кромка последующего листа перекрывает заднюю кромку предыдущего листа и которое пояснялось применительно к этапам S12 и S13 согласно фиг. 6A.
На фиг. 7 и 8 представлены в увеличенном масштабе виды, каждый из которых иллюстрирует участок между участком зажима при подаче, образованным подающим валиком 3 и подающим приводным валиком 4, и участком зажима при транспортировке, образованным транспортирующим валиком 5 и прижимным валиком 6.
Теперь будут пояснены три состояния, наступающие в процессе транспортировки листов для печати транспортирующим валиком 5 и подающим валиком 3. Первое состояние, в котором проводят операцию, в ходе которой последующий лист преследует предыдущий лист, будет описано со ссылками на виды SV1 и SV2 согласно фиг. 7. Второе состояние, в котором проводят операцию, в ходе которой последующий лист перекрывает предыдущий лист, будет описано со ссылками на виды SV3 и SV4 согласно фиг. 8. Третье состояние, в котором определяют, проводить ли операцию коррекции перекоса последующего листа, поддерживая при этом состояние перекрытия, будет описано со ссылками на вил SV5 согласно фиг. 8.
На виде SV1 согласно фиг. 7 показано, что управление подающим валиком 3 осуществляют, обеспечивая транспортировку последующего листа 1-B, а датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B. Секцию от датчика 16 обнаружения листа до положения P1, в котором последующий лист 1-B можно сделать перекрывающим предыдущий лист 1-A, определяют как первую секцию A1. В первой секции A1 проводят операцию, в ходе которой передняя кромка последующего листа 1-B преследует заднюю кромку предыдущего листа 1-A. Решение о положении P1 принимают на основании компоновки механизма.
В первом состоянии, операцию преследования в первой секции A1 можно остановить. Если, как показано на виде SV2 согласно фиг. 7, передняя кромка последующего листа 1-B проходит заднюю кромку предыдущего листа 1-A до достижения положения P1, операцию, в ходе которой последующий лист перекрывает предыдущий лист, не проводят.
На виде SV3 согласно фиг. 8, секцию от вышеописанного положения P1 до положения P2, в котором предусмотрен рычаг 17 прижима листов, определяют как вторую секцию A2. Во второй секции A2 проводят операцию, в ходе которой последующий лист 1-B перекрывает предыдущий лист 1-A.
Во втором состоянии, операцию перекрытия последующим листом предыдущего листа во второй секции A2 можно остановить. Если, как показано на виде SV4 согласно фиг. 8, передняя кромка последующего листа 1-B не может догнать заднюю кромку предыдущего листа 1-A в пределах второй секции A2, то провести операцию перекрытия последующим листом предыдущего листа невозможно.
На виде SV5 согласно фиг. 8, секцию от вышеописанного положения P2 до положения P3 определяют как третью секцию A3. Положение P3 - это положение передней кромки последующего листа, когда последующий лист не движется на этапе S13 согласно фиг. 6A. Когда последующий лист 1-B перекрывает предыдущий лист 1-A, транспортировка последующего листа 1-B происходит таким образом, что его передняя кромка достигает положения P3. В третьей секции A3 определяют, проводить ли выравнивание последующего листа 1-B, заставляя его упираться в участок зажима при транспортировке и сохраняя при этом состояние перекрытия. То есть определяют проводить ли выравнивание последующего листа путем проведения операции коррекции перекоса с одновременным сохранением состояния перекрытия или проводить выравнивание последующего листа путем исключения состояния перекрытия и проведения операции коррекции перекоса.
На фиг. 9 представлена блок-схема для пояснения операции коррекции перекоса последующего листа в соответствии с этим вариантом осуществления. Теперь будет подробно описана обработка, которая позволяет определить, удовлетворяются ли заранее определенные условия, и пояснена применительно к этапу S14 согласно фиг. 6A.
Теперь будет описана операция определения того, проводить ли операцию коррекции перекоса, осуществляемую посредством того, что заставляют переднюю кромку последующего листа 1-B упираться в участок зажима при транспортировке и сохраняют при этом состояние перекрытия между предыдущим листом 1-A и последующим листом 1-B, или проводить операцию коррекции перекоса, осуществляемую посредством того, что исключают состояние перекрытия между предыдущим листом 1-A и последующим листом 1-B, а потом упирают переднюю кромку последующего листа 1-B в участок зажима при транспортировке.
Работа начинается на этапе S101. На этапе S102 определяют, достигла ли передняя кромка последующего листа 1-B положения определения (положения P3 на виде SV5 согласно фиг. 8). Если передняя кромка последующего листа 1-B не достигла положения определения (ответ «НЕТ» на этапе S102), то неясно, упирается ли передняя кромка последующего листа 1-B в участок зажима при транспортировке за счет транспортировки последующего листа 1-B в соответствии с заранее определенным параметром, и поэтому принимают решение о проведении операции коррекции перекоса только для последующего листа (этап S103), вследствие чего операция определения заканчивается (этап S104). То есть, после того, как задняя кромка предыдущего листа 1-A проходит через участок зажима при транспортировке, только последующий лист 1-B упирают в участок зажима при транспортировке, чтобы провести операцию коррекции перекоса, а затем проводят выравнивание только последующего листа 1-B.
С другой стороны, если определяют, что последующий лист 1-B достиг положения определения P3 (ответ «ДА» на этапе S102), то определяют, прошла ли задняя кромка предыдущего листа 1-A через участок зажима при транспортировке (этап S105). Если определяют, что задняя кромка предыдущего листа 1-A прошла через участок зажима при транспортировке (ответ «ДА» на этапе S105), то последующий лист не перекрывает предыдущий лист, и поэтому принимают решение о проведении операции коррекции перекоса только последующего листа (этап S106). То есть, только последующий лист 1-B упирают в участок зажима при транспортировке, чтобы провести операцию коррекции перекоса, а затем проводят выравнивание только последующего листа 1-B.
С другой стороны, если определяют, что задняя кромка предыдущего листа 1-A не прошла через участок зажима при транспортировке (ответ «НЕТ» на этапе S105), то определяют, меньше ли величина перекрытия задней кромки предыдущего листа 1-A и передней кромки последующего листа 1-B, чем пороговое значение (этап S107). Положение задней кромки предыдущего листа 1-A обновляют при проведении операции печати предыдущего листа 1-A. Положение передней кромки последующего листа 1-B оказывается вышеописанным положением определения. То есть, величина перекрытия при проведении операции печати предыдущего листа 1-A уменьшается. Если определяют, что величина перекрытия меньше, чем пороговое значение (ответ «ДА» на этапе S107), то состояние перекрытия исключают, и принимают решение о проведении операции коррекции перекоса только последующего листа (этап S108). То есть, после того, как операция формирования изображения предыдущего листа 1-A заканчивается, последующий лист 1-B не транспортируют вместе с предыдущим листом 1-A. Конкретнее, двигатель 205 транспортировки приводит в движение транспортирующий валик 5 для транспортировки предыдущего листа 1-A. Однако подающий валик 3 в движение не приводится. Поэтому состояние перекрытия исключается. Помимо этого, только последующий лист 1-B упирают в участок зажима при транспортировке, чтобы провести операцию коррекции перекоса, а затем проводят выравнивание только последующего листа 1-B.
Если определяют, что величина перекрытия равна пороговому значению или больше него (ответ «НЕТ» на этапе S107), то определяют, достиг ли последующий лист 1-B нажимного прямозубого зубчатого колеса 12, когда осуществляют выравнивание последующего листа 1-B (этап S109). Если определяют, что последующий лист 1-B не достиг нажимного прямозубого зубчатого колеса 12 (ответ «НЕТ» на этапе S109), то состояние перекрытия исключают, и принимают решение о проведении операции коррекции перекоса только для последующего листа (этап S110). То есть, после того, как операции формирования изображения предыдущего листа 1-A заканчивается, последующий лист 1-B не транспортируют вместе с предыдущим листом 1-A. Конкретнее, двигатель 205 транспортировки приводит транспортирующий валик 5 в движение для транспортировки предыдущего листа 1-A. Однако подающий валик 3 в движение не приводится. Поэтому состояние перекрытия исключается. Помимо этого, только последующий лист 1-B упирают в участок зажима при транспортировке, чтобы провести операцию коррекции перекоса, а затем проводят выравнивание только последующего листа 1-B.
Если определяют, что последующий лист 1-B достиг нажимного прямозубого зубчатого колеса 12 (ответ «ДА» на этапе S109), то операцию коррекции перекоса последующего листа 1-B проводят, сохраняя при этом состояние перекрытия (этап S112), а затем проводят выравнивание последующего листа 1-B. То есть, во время операции формирования изображения предыдущего листа 1-A (в течение времени от момента окончания операции подачи последней строки, до следующей операции транспортировки), переднюю кромку последующего листа 1-B упирают в участок зажима при транспортировке, а последующий лист 1-B перекрывает предыдущий лист 1-A. Конкретнее, транспортирующий валик 5 и подающий валик 3 вращаются за счет приведения их в движение двигателем 206 подачи вместе с двигателем 205 транспортировки. После операции коррекции перекоса проводят выравнивание последующего листа 1-B, а последующий лист 1-B при этом перекрывает предыдущий лист 1-A.
Как описано выше, проводят операцию определения того, сохранить или исключить состояние перекрытия между предыдущим листом 1-A и последующим листом 1-B.
На фиг. 10 представлена блок-схема для пояснения операции вычисления положения передней кромки последующего листа после выравнивания последующего листа в соответствии с этим вариантом осуществления.
Процесс начинается на этапе S201. На этапе S202 загружают область печати с размером листов. Поскольку крайнее верхнее положение печати, то есть, граница на верхнем конце задана, границу на верхнем конце области печати задают как положение передней кромки (этап S203). Отметим, что положение передней кромки определяется расстоянием от участка зажима при транспортировке.
Загружают первые данные печати (этап S204). С помощью этой обработки, задают положение первых данных печати от передней кромки листа (обнаружение области отсутствия печати) и тем самым определяют больше ли расстояние между передней кромкой листа и первыми данными печати, чем ранее заданное положение передней кромки (этап S205). Если расстояние между передней кромкой листа и первыми данными печати больше, чем ранее заданное положение передней кромки (ответ «ДА» на этапе S205), то положение передней кромки обновляют расстоянием между кромкой листа и первыми данными печати (этап S206). Если расстояние между передней кромкой листа и первыми данными печати равно ранее заданному положению передней кромки или меньше него (ответ «НЕТ» на этапе S205), то процесс переходит к этапу S207.
Далее, генерируют команду первого движения каретки (этап S207). Определяют, больше ли величина транспортировки листа для первого движения каретки, чем ранее заданное положение передней кромки (этап S208). Если величина транспортировки листа для первого движения каретки больше, чем ранее заданное положение передней кромки (ответ «ДА» на этапе S208), то положение передней кромки обновляют посредством величины транспортировки листа для первого движения каретки (этап S209). Если величина транспортировки листа для первого движения каретки равна ранее заданному положению передней кромки, или меньше него (ответ «НЕТ» на этапе S208), то положение передней кромки не обновляют. Таким образом, положение передней кромки последующего листа 1-B подтверждается (этап S210), а процесс заканчивается (этап S211). На основании подтвержденного положения передней кромки, появляется возможность определить (этап S109 согласно фиг. 9), достиг ли последующий лист 1-B нажимного прямозубого зубчатого колеса 12 при осуществлении выравнивания последующего листа B.
Как описано выше, в соответствии с указанным вариантом осуществления, за счет определения того, транспортировать ли последующий лист в положение, в котором он обращен к печатающая головка 7, с одновременным сохранением состояния перекрытия, когда передняя кромка последующего листа 1-B перекрывает заднюю кромку предыдущего листа 1-A, появляется возможность начинать подачу последующего листа даже в случае, если предельная величина задней кромки предыдущего листа и предельная величина передней кромки последующего листа не подтверждены.
Когда печатающая головка 7 проводит операцию печати на предыдущем листе 1-A, приведение в действие двигателя 206 подачи осуществляют синхронно с двигателем 205 транспортировки до того, как датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа 1-B, а после того, как датчик 16 обнаружения листа обнаруживает переднюю кромку последующего листа, приведение в действие двигателя 206 подачи осуществляют непрерывно, делая возможным проведение операции, в ходе которой последующий лист догоняет предыдущий лист, перекрывая его.
ДРУГИЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Вариант(ы) осуществления данного изобретения можно также реализовать посредством компьютера системы или устройства, который считывает исполняемые компьютером команды (например, одной или нескольких программ), записанные на носителе информации (который можно также именовать полнее как «некратковременный компьютерно-читаемый носитель информации»), для выполнения функций согласно одному или нескольким вышеописанным вариантам осуществления, и/или который включает в себя одну или несколько схем (например специализированную интегральную схему (ASIC)) для выполнения функций согласно одному или нескольким вышеописанным вариантам осуществления, а также посредством способа, осуществляемого компьютером системы или устройства, например, путем считывания и исполнения команд, исполняемых компьютером, с носителя информации для выполнения функций согласно одному или нескольким вышеописанным вариантам осуществления, и/или управления одной или несколькими схемами для выполнения функций согласно одному или нескольким вышеописанным вариантам осуществления. Компьютер может содержать один или несколько процессоров (например, центральный процессор (CPU), микропроцессорный блок (MPU)) и может включать в себя сеть отдельных компьютеров или отдельных процессоров для считывания и исполнения команд, исполняемых компьютером. Команды, исполняемые компьютером, могут выдаваться в компьютер, например, из сети или с носителя информации. Носитель информации может включать в себя один или несколько из таких, как, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), память распределенных вычислительных систем, оптический диск (такой, как компакт-диск (CD), цифровой универсальный диск (DVD), или диск Blu-ray (BD)™), устройство флэш-памяти, плата памяти, и т.п.
Хотя данное изобретение описано со ссылками на возможные варианты осуществления, следует понять, что изобретение не ограничивается описанными вариантами осуществления. Объем притязаний нижеследующей формулы изобретения нужно воспринимать в широчайшей интерпретации как охватывающий все такие модификации, эквивалентные структуры и функции.
Реферат
Печатающее устройство содержит блок управления транспортировкой, который управляет транспортировкой листов для печати таким образом, что задняя кромка предыдущего листа в качестве листа для печати, ранее поданного из блока укладки в стопку, и передняя кромка последующего листа в качестве листа для печати, впоследствии поданного из блока укладки в стопку, перекрывают друг друга; и блок коррекции перекоса, который осуществляет коррекцию перекоса последующего листа, когда последующий лист перекрывает предыдущий лист, с помощью блока управления транспортировкой. Блок коррекции перекоса заставляет переднюю кромку последующего листа упираться в транспортирующий валик в течение времени от окончания операции подачи последней строки транспортирующим валиком для печати на предыдущем листе с помощью печатающего блока до начала следующей операции транспортировки. 3 н. и 10 з.п. ф-лы, 12 ил.
Комментарии