Электрический мост - RU2592198C2
Код документа: RU2592198C2
Чертежи






Описание
Область техники
Настоящее изобретение относится к электрическому мосту четырехколесного транспортного средства. В частности, настоящее изобретение относится к электрическому мосту, содержащему блок векторизации крутящего момента для создания разности крутящих моментов между правым и левым колесами указанного моста.
Уровень техники
Желательно, чтобы дорожные транспортные средства обладали способностью распределения различного приводного крутящего момента между разными колесами для улучшения устойчивости транспортных средств и/или их рабочих характеристик. Известны блоки векторизации крутящего момента для дорожных транспортных средств, выполненные для изменения распределения приводных крутящих моментов транспортного средства.
Такие устройства векторизации крутящего момента выполнены для быстрого изменения крутящего момента в боковом направлении на ведущем мосту или в продольном направлении между ведущим и неведущим мостами.
Для достижения необходимого результата с точки зрения динамики вождения при определенных обстоятельствах может быть предпочтительным приложить к приводному колесу положительный крутящий момент относительно другого приводного колеса на ведущем мосту. Такой положительный крутящий момент может быть получен известным способом с помощью механического шестеренчатого устройства, выполненного для повышения передачи или скорости вращения приводного вала рассматриваемого колеса, например, на 10%.
Известно много примеров таких механических шестеренчатых устройств. В таких конструкциях, являющихся тяжелыми и дорогостоящими, устройства векторизации крутящего момента расположены с обеих сторон межосевого дифференциала для двух приводных валов.
Следовательно, при необходимости иметь разность скоростей вращения между двумя колесами известные устройства оказывают воздействие на скорость вращения по отношению к абсолютной скорости вращения, что приводит к утяжелению устройств и к относительно высокому энергопотреблению.
В свете вышеизложенного, заявителем ранее был предложен блок векторизации крутящего момента, преодолевающий указанные выше недостатки. Этот блок, который полностью раскрыт в WO 2010101506, содержит электрический двигатель, соединенный с ведущим мостом дорожного транспортного средства таким образом, что при активизации он обеспечивает положительный крутящий момент на одном колесе и обратный крутящий момент на другом колесе при расположении каждых колес на одном мосту.
Блок векторизации крутящего момента расположен на ведущем мосту транспортного средства. Движущая сила может быть создана электрическим двигателем, так что блок векторизации крутящего момента работает на электрическом мосту транспортного средства. Такие электрические мосты представляют значительный интерес при создании четырехколесного привода, например, в гибридном автомобиле, т.е. транспортном средстве, первая трансмиссия которого служит для обеспечения крутящего момента на переднем мосту, а вторая трансмиссия служит для обеспечения крутящего момента на заднем мосту.
Хотя предложенный ранее блок представляет значительный интерес, растущие промышленные потребности требуют усовершенствований, касающихся рабочих характеристик, упрощения, пространственных требований, затрат и т.п. Следовательно, существует необходимость в создании более компактного и экономически эффективного электрического моста с блоком векторизации крутящего момента.
Сущность изобретения
Таким образом, настоящее изобретение направлено предпочтительно на уменьшение степени, смягчение последствий или устранение одного или нескольких вышеуказанных технических недостатков, каждого по отдельности или всех вместе, и решение, по меньшей мере, вышеупомянутых задач путем создания устройства в соответствии с прилагаемой формулой изобретения. Следовательно, задача настоящего изобретения состоит в создании ведущего моста с электрическим приводом и блоком векторизации крутящего момента, позволяющего устранить вышеуказанные проблемы.
Еще одна задача настоящего изобретения состоит в создании электрического моста с блоком векторизации крутящего момента, имеющего более высокое передаточное отношение.
Кроме того, еще одна задача настоящего изобретения состоит в создании электрического моста с устройством векторизации крутящего момента, имеющего значительно меньшие размеры.
Согласно первому аспекту предложен электрический мост для четырехколесных дорожных транспортных средств. Электрический мост содержит тяговый электродвигатель, расположенный соосно на указанном мосту; первую планетарную передачу, соединенную с тяговым электродвигателем и первой стороной моста, и вторую планетарную передачу, соединенную с тяговым электродвигателем и второй стороной моста, первая и вторая планетарные передачи образуют дифференциальный механизм; и блок векторизации крутящего момента, содержащий электродвигатель, расположенный соосно на мосту, с возможностью изменения распределения крутящего момента между первой стороной и второй стороной моста, причем электродвигатель блока векторизации крутящего момента соединен с первой и второй планетарными передачами.
Согласно второму аспекту предложено четырехколесное дорожное транспортное средство, содержащее электрический мост по первому аспекту.
Краткое описание чертежей
Ниже приведено подробное описание настоящего изобретения со ссылкой на прилагаемые чертежи, где:
на фиг.1 показана схема транспортного средства согласно примеру осуществления изобретения;
на фиг.2 показана схема транспортного средства согласно другому примеру осуществления изобретения;
на фиг.3 показана схема транспортного средства согласно еще одному примеру осуществления изобретения;
на фиг.4 показана схема транспортного средства согласно другому примеру осуществления изобретения;
на фиг.5 показана схема транспортного средства согласно еще одному примеру осуществления изобретения;
на фиг.6 показана схема устройства векторизации крутящего момента согласно примеру осуществления изобретения;
на фиг.7 показан вид в разрезе электрического моста транспортного средства, содержащего устройство векторизации крутящего момента согласно примеру осуществления изобретения;
на фиг.8 показан вид в разрезе электрического моста транспортного средства, содержащего устройство векторизации крутящего момента согласно другому примеру осуществления изобретения;
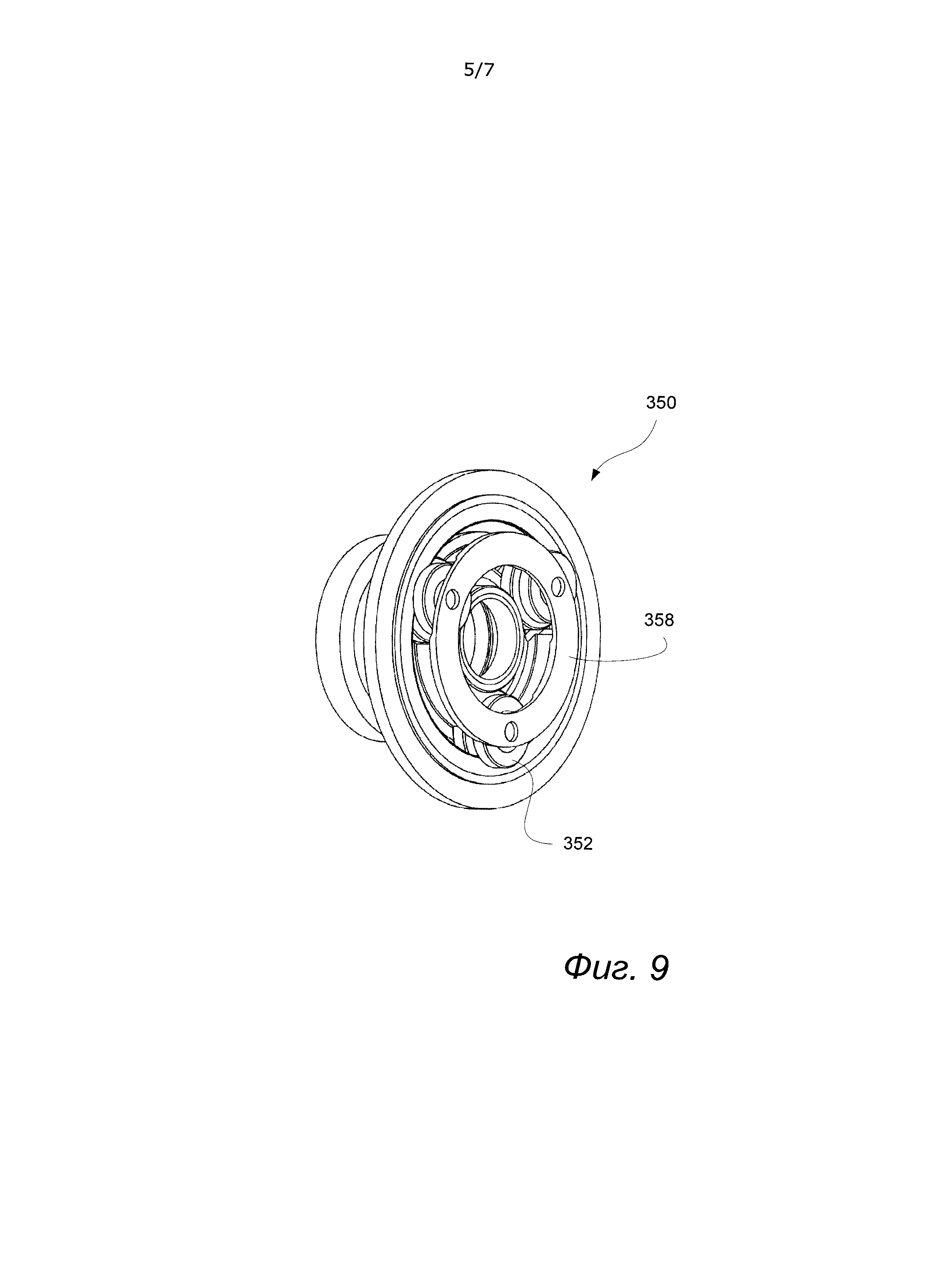
на фиг.9 показано изометрическое изображение коробки переключения передач, изображенной на фиг.8;
на фиг.10 показан вид в разрезе устройства векторизации крутящего момента согласно другому примеру осуществления изобретения;
на фиг.11 показано изометрическое изображение коробки переключения передач, изображенной на фиг.10.
Подробное описание
Ниже будет приведено более подробное описание нескольких примеров осуществления настоящего изобретения со ссылкой на прилагаемые чертежи, способствующих его осуществлению специалистами в данной области. Однако настоящее изобретение может быть воплощено во многих различных формах и не должно рассматриваться как ограниченное примерами осуществления изобретения, изложенными в данном описании. Скорее, эти варианты осуществления изобретения представлены так, что данное описание выглядит полным и завершенным и полностью раскрывает объем изобретения специалистам в данной области.
Примеры осуществления изобретения не ограничивают объем притязаний настоящего изобретения, ограниченный только прилагаемой формулой изобретения. Более того, терминология, используемая в подробном описании конкретных примеров осуществления изобретения, иллюстрированных прилагаемыми чертежами, не может служить ограничением настоящего изобретения.
На фиг.1-6 показаны примеры конфигураций карданной передачи транспортного средства. В этих примерах осуществления изобретения, транспортное средство 10 содержит передний мост 12, соединенный с задним мостом 14, и устройство 16 векторизации крутящего момента.
Передний мост 12 (фиг.1) получает привод посредством трансмиссии 18, а задний мост 14 получает привод посредством электродвигателя 20. Устройство 16 векторизации крутящего момента расположено на заднем электрическом мосту 14.
На фиг.2 показана аналогичная конструкция, но здесь задний мост получает привод посредством трансмиссии 18, а передний мост получает привод посредством электродвигателя 20. Следовательно, устройство 16 векторизации крутящего момента расположено на переднем электрическом мосту.
На фиг.3 и 4 показаны конфигурации, в которых передний мост 12 или задний мост 14 получает привод посредством электродвигателя 20, а устройство 16 векторизации крутящего момента расположено на получающем привод электрическом мосту 12, 14.
На фиг.5 в качестве дополнительного примера показана конфигурация, в которой передний мост 12 и задний мост 14 получают привод от электродвигателей 20. Устройства 16 векторизации крутящего момента расположены на каждом электрическом мосту 12, 14.
На фиг.6 показана базовая конфигурация электрического моста 100, содержащего устройство 110 векторизации крутящего момента. Ведущий мост 100 транспортного средства получает привод посредством тягового блока 120 и имеет два колеса 102а, 102b, соединенные с противоположными концами моста 100. Тяговый блок 120, выполненный в виде электродвигателя, соединен с дифференциальным механизмом 130 для обеспечения вращения колес 102а, 102b с разной скоростью. Электродвигатель 140 соединен с дифференциальным механизмом 130 для обеспечения создания разности крутящих моментов на противоположных концах моста 100. С электродвигателем 140 соединено средство 150 управления, выполненное с возможностью расчета величины управляющих сигналов и их передачи электродвигателю 140 устройства 110 векторизации крутящего момента.
При движении транспортного средства по прямой, вращение обоих колес 102а, 102b происходит с одинаковой скоростью. В этом случае электродвигатель 140 будет находиться в состоянии бездействия. При движении автомобиля по поверхности с неравномерным сцеплением, для увеличения сцепления колес ведущего моста 100 может быть использовано устройство 110 векторизации крутящего момента. В таких случаях, средства 150 управления отправляют сигнал на электродвигатель 140 устройства 110 векторизации крутящего момента, который активизирует устройство 110 и вызывает приложение крутящего момента. В результате, на одном из концов моста 100 будет иметь место увеличение крутящего момента, а на противоположном конце моста 100 будет иметь место соответствующее уменьшение крутящего момента.
Более подробно пример осуществления электрического моста 200 транспортного средства, содержащего устройство векторизации крутящего момента, показан на фиг.7. Электрический мост 200, содержащий тяговый электродвигатель 210, дифференциальный механизм 220 и устройство 240 векторизации крутящего момента, выполнен с возможностью соединения с валом левого колеса и валом правого колеса (не показаны). Тяговый электродвигатель 210 расположен соосно на мосту 200 и соединен на каждой боковой стороне с дифференциальным механизмом 220, состоящим из двух соосно выровненных планетарных передач 222а, 222b, в которых тяговый электродвигатель 210 осуществляет привод их центральных шестерен 224а, 224b. Валы левого и правого колес связаны с водилами 226а, 226b соответствующих планетарных передач 222а, 222b. Кольцевая шестерня 228а, 228b соответствующей планетарной передачи 222а, 222b имеет внешнюю поверхность, выполненную с возможностью соединения, например с помощью зубьев, с устройством 240 векторизации крутящего момента.
Устройство 240 векторизации крутящего момента содержит электродвигатель 242, расположенный соосно на мосту 200, таким образом, что ось вращения двигателя 242 совпадает с осью вращения тягового электродвигателя 210. Кроме того, электродвигатель 242 расположен на расстоянии от дифференциального механизма 220, то есть между одной из планетарных передач 220а, 200b и ближайшим валом колеса.
Электродвигатель 242 устройства 240 векторизации крутящего момента напрямую соединен с кольцевым колесом 228b второй планетарной передачи 222b и кольцевым колесом 228а первой планетарной передачи 222а через выполненный с возможностью вращения уравновешивающий вал 244, проходящий параллельно мосту 200 и имеющий шестерни для сцепления с кольцевой шестерней 228а планетарной передачи 222а. Шестерни уравновешивающего вала 244 выполнены с возможностью передачи крутящего момента к планетарной передаче 222а при вращении уравновешивающего вала 244, при этом крутящий момент, передаваемый к планетарной передаче 222а, направлен противоположно крутящему моменту, передаваемому напрямую к другой планетарной передаче 222b.
Кольцевые колеса 228а, 228b соединены с электродвигателем через цикловой привод 250 с возможностью создания понижающей передачи между электродвигателем 242 и дифференциальным механизмом 220. Цикловой привод 250 содержит эксцентричный входной вал 252, управляемый напрямую электродвигателем 242. Циклоидный диск напрямую соединен с входным валом 252 и выполнен с возможностью свободного вращения внутри стационарного кольцевого колеса. Диск выполнен с возможностью управления при вращении выходным валом, содержащим диск с роликами, выполненными с возможностью вращения в пределах соответствующих прорезей в диске.
Диапазон понижающей передачи должен предпочтительно составлять от 30 до 50, хотя могут быть использованы и другие коэффициенты. Обычные требования к понижающей передаче могут зависеть от необходимости иметь двигатель с низкими эксплуатационными характеристиками, для чего необходимо иметь высокое передаточное отношение, а также от заданного низкого передаточного отношения для уменьшения максимальной скорости двигателя.
В другом примере осуществления изобретения, выходным валом циклового привода является кольцевое колесо, при этом роликовый удерживается неподвижным.
На фиг.8 показан другой пример осуществления электрического моста 300. Электрический мост 300 содержит тяговый электродвигатель 310 и дифференциальный механизм 320, идентичные показанным на фиг.7. Устройство 340 векторизации крутящего момента отличается от предыдущего примера осуществления изобретения выбором понижающей передачи 350, которой в данном случае является дифференциальная планетарная передача. Такая дифференциальная планетарная передача очень компактна и обеспечивает большее передаточное отношение между электродвигателем 342 и дифференциальным механизмом 320, чем обычная планетарная передача.
Например, необходимость иметь понижающую передачу с коэффициентом 50, как правило, может потребовать наличия 3 или 4 планетарных передач, расположенных последовательно. Таким образом, выбор дифференциальной планетарной передачи весьма предпочтителен.
Дифференциальная планетарная передача 350, также показанная на фиг.9, содержит сателлиты 352, имеющие две разные шестерни, одна из которых соединена с кольцевыми колесами планетарных передач 322а, 322b дифференциального механизма, а другая соединена со стационарным кольцевым колесом 354. Вторая шестерня сателлитов 352 также соединена с центральной шестерней 356, которая, в свою очередь, соединена с электродвигателем 342. Таким образом, водило сателлитов 358 не имеет соединения ни с одним из мостов.
На фиг.10 показан третий пример осуществления электрического моста 400. Электрический мост 400 содержит тяговый электродвигатель 410 и дифференциальный механизм 420, идентичные показанным на фиг.7 и 9. Устройство 440 векторизации крутящего момента отличается от предыдущего примера осуществления изобретения выбором понижающей передачи 450, которой в данном случае может служить сдвоенный цикловой привод. Такой привод очень компактен и может обеспечить большее передаточное отношение между электродвигателем 442 и дифференциальным механизмом 420, чем обычная планетарная передача. Кроме того, использование сдвоенного циклового привода обеспечивает создание эффекта уравновешивания радиальных сил реакции и весовой балансировки, что означает, что понижающая передача обеспечивает более высокую частоту вращения.
Сдвоенный цикловой привод может работать, например, с частотой вращения до 16.500 оборотов в минуту, что, согласно рассмотренному выше, со ссылкой на фиг.7, намного превышает частоту вращения обычного циклового привода.
Сдвоенный цикловой привод (фиг.11) содержит два диска 452, 454, эксцентрично расположенные на вращающемся валу электродвигателя 442. Ролики 456 расположены на роликовой опоре 458, имеющей блокировку против вращения. Эксцентрическое движение дисков 452, 454 обеспечивает ступенчатое перемещение относительно кольцевого колеса 459 циклового привода 450, посредством чего достигается понижающая передача.
В другом примере осуществления изобретения сдвоенный цикловой привод 450 заменен многоступенчатым цикловым приводом, содержащим три или более дисков, расположенных на вращающемся валу электродвигателя.
В еще одном примере осуществления изобретения понижающая передача 250, 350, 450 исключена, так что электродвигатель устройства векторизации крутящего момента соединен напрямую с кольцевым колесом второй планетарной передачи дифференциального механизма и соединен через уравновешивающий вал с кольцевым колесом первой планетарной передачи дифференциального механизма. Преимущество такого примера осуществления изобретения состоит в использовании меньшего количества компонентов, хотя это требует максимальной работоспособности электродвигателя.
Следует учесть, что рассмотренные выше примеры осуществления изобретения могут быть объединены без выхода за пределы его объема, определяемого приведенной ниже формулой изобретения. Хотя описание настоящего изобретение приведено со ссылкой на конкретные примеры осуществления изобретения, оно не ограничено какой-либо специальной конфигурацией, изложенной в настоящем описании. Скорее изобретение ограничено только формулой изобретения, в пределах которой одинаково возможно использование и других примеров осуществления изобретения, отличных от рассмотренных выше.
В формуле изобретения термин "содержит/содержащий" не исключает наличия других элементов или шагов. Кроме того, несколько отдельно взятых средств, элементов или шагов способа могут быть реализованы, например, одним блоком или процессором. Более того, несмотря на включение отдельных свойств в разные пункты формулы изобретения, они могут быть преимущественно объединены, а включение в разные пункты формулы изобретения не подразумевает невыполнимости и/или неэффективности комбинации свойств. Также одиночные ссылки не исключают множественности. Термины "какой-либо", "первый", "второй" и т.д. не препятствуют множественности. Ссылочные позиции в формуле изобретения могут быть приведены исключительно в виде поясняющих примеров и не должны так или иначе рассматриваться как ограничение объема притязаний формулы изобретения.
Реферат
Изобретение относится к электрическому мосту транспортного средства. Электрический мост для четырехколесного дорожного транспортного средства содержит тяговый электродвигатель расположенный соосно на мосту; первую планетарную передачу, соединенную с тяговым электродвигателем и первой стороной моста; вторую планетарную передачу, соединенную с тяговым электродвигателем и второй стороной моста. Первая и вторая планетарные передачи образуют дифференциальный механизм. Блок векторизации крутящего момента содержит электродвигатель, расположенный соосно на мосту, для обеспечения изменения распределения крутящего момента между первой и второй стороной моста. Электродвигатель блока векторизации крутящего момента соединен с первой и второй планетарными передачами. Повышается скорость изменения крутящего момента на ведущем мосту. 2 н. и 10 з.п. ф-лы, 11 ил.
Формула
тяговый электродвигатель (210, 310, 410), расположенный соосно на мосту (200, 300, 400),
первую планетарную передачу (222а, 322а, 422а), соединенную с тяговым электродвигателем (210, 310, 410) и первой стороной моста (200, 300, 400); и вторую планетарную передачу (222b, 322b, 422b), соединенную с тяговым электродвигателем (210, 310, 410) и второй стороной моста (200, 300, 400), причем первая и вторая планетарные передачи (222, 322, 422) образуют дифференциальный механизм (220, 320, 420), и
блок (240, 340, 440) векторизации крутящего момента, содержащий электродвигатель (242, 342, 442), расположенный соосно на мосту (200, 300, 400) для обеспечения изменения распределения крутящего момента между первой стороной и второй стороной моста (200, 300, 400), причем
электродвигатель (242, 342, 442) блока (240, 340, 440) векторизации крутящего момента соединен с первой и второй планетарными передачами (222, 322, 422).
причем вторая шестерня сателлитов (352) соединена с соответствующими кольцевыми колесами (328а, 328b) планетарных передач (322а, 322b) дифференциального механизма (320).
Комментарии