Приводная система шасси - RU2643857C2
Код документа: RU2643857C2
Чертежи


















Описание
Область техники
Изобретение относится к приводным системам, предназначенным для вращения одного или нескольких колес шасси летательного аппарата при рулении на земле и/или при раскручивании колес перед посадкой.
Уровень техники
Летательным аппаратам необходимо производить руление на земле для перемещения между различными участками аэродрома. Например, для руления между взлетно-посадочной полосой и местом (например, воротами терминала), в котором будет производиться посадка на борт или высадка пассажиров. Как правило, такое руление осуществляется с помощью тяги от двигателей летательного аппарата для его перемещения вперед так, чтобы при этом вращались колеса стойки шасси. Поскольку скорость руления обязательно должна быть сравнительно низкой, двигатели должны работать с очень низкой тягой. На низкой тяге коэффициент полезного действия является низким и происходит высокий расход топлива. Это приводит к повышенному уровню локального загрязнения атмосферы вокруг аэропортов и повышенному шуму. Кроме того, даже при работе двигателей на низкой тяге, как правило, необходимо использовать колесные тормоза для ограничения скорости руления, что приводит к высокому износу тормозов.
Задний ход гражданских самолетов, например, от ворот терминала с помощью основных двигателей запрещен. При необходимости реверсирования или в других ситуациях, когда руление с помощью тяги основных двигателей невозможно, для перемещения самолета используются тягачи. Этот процесс является трудоемким и дорогостоящим.
Таким образом, существует необходимость в приводной системе для колес шасси летательного аппарата во время руления на земле. Также желательно использовать такую приводную систему для предварительного раскручивания колес перед посадкой, чтобы колеса уже вращались с начальной скоростью посадки или приблизительно равной ей. Предварительное раскручивание колес перед посадкой обеспечивает уменьшение износа протектора колес при посадке, а также снижение нагрузок, действующих на стойки шасси самолета при посадке.
В последние годы были предложены несколько автономных систем руления как для привода колес шасси при рулении на земле, так и для раскручивания колес перед посадкой. Примером таких систем является система, раскрытая в патентном документе US 2006/0065779. В этой системе колесо передней опоры шасси имеет привод, и имеется муфта для переключения из режима свободного вращения колеса в режим привода колеса электромотором. Указанная муфта может также использоваться для предварительной раскрутки колеса электромотором перед посадкой.
Подобные системы, как правило, предназначены только для передней стойки шасси, поскольку они занимают слишком много места для встраивания в основную стойку шасси, в которой большое пространство вблизи колес занимают тормозные системы. Однако на переднюю стойку шасси приходится лишь небольшая часть вертикальных нагрузок, приходящихся на шасси самолета в целом при рулении по аэродрому (приблизительно 5% массы летательного аппарата). Таким образом, сила сцепления между приводным колесом передней стойки шасси и покрытием аэродрома может быть недостаточной для надежного руления самолета на земле. Особое беспокойство вызывает ситуация, когда центр тяжести летательного аппарата расположен в предельно задней точке, а поверхность земли является скользкой.
Система, не ограничивающаяся передней стойкой шасси, описана в патентном документе WO 2011/023505. В известной системе используется привод для перемещения ведущей шестерни и ввода ее в зацепление и вывода из зацепления с кольцевым ведомым колесом на колесе стойки шасси. Применение данной системы ограничено рулением на земле.
Раскрытие изобретения
Первым объектом изобретения является приводная система для вращения колеса шасси летательного аппарата, содержащая электромотор, выполненный с возможностью вращения первой ведущей шестерни посредством первой передачи, и ведомое колесо, выполненное с возможностью крепления к колесу, причем приводная система имеет первый режим, в котором первая ведущая шестерня входит в зацепление с ведомым колесом для приведения его в движение электромотором посредством первой передачи, причем или первая ведущая шестерня, или ведомое колесо выполнены в виде первой звездочки, а другая первая ведущая шестерня или другое ведомое колесо содержит ряд роликов, установленных в два или более ряда и расположенных по кольцу, причем каждый ролик выполнен с возможностью вращения вокруг собственной оси, расположенной на фиксированном расстоянии от оси вращения первой ведущей шестерни или ведомого колеса соответственно.
Основным преимуществом соединения электромотора с колесом посредством звездочки и ряда роликов, расположенных по кольцу, является то, что такой механизм высоконадежен и устойчив к загрязнению окружающей средой. Таким образом, подобную систему привода можно не заключать в корпус для предотвращения попадания в нее мусора и загрязняющих частиц. Напротив, система по WO 2011/023505, в которой используются входящие в зацепление зубчатые колеса, должна быть соответствующим образом защищена от попадания загрязняющих частиц, и необходимый для этого защитный корпус увеличивает вес такой системы, повышает затраты на ее изготовление, а также затрудняет профилактический осмотр.
Еще одним преимуществом соединения типа звездочка-ролик является то, что такое соединение более устойчиво к деформации колеса и отклонению осей между ведущим и ведомым колесами, чем устройства с зацепляющимися зубчатыми колесами. Колеса шасси при рулении подвергаются высоким нагрузкам и, соответственно, значительной деформации, и прикрепленное к колесу ведомое колесо неизбежно будет деформироваться вследствие вышеупомянутой деформации колеса. Входящие в зацепление зубчатые колеса не выдерживают подобной деформации и может потребоваться изолирование типового зубчатого венца от колеса посредством подшипника, какого-либо гибкого соединительного устройства или аналогичного средства. Используемое в изобретении соединение типа звездочка-ролик является устойчивым к деформации колеса и не требует подобных изменений.
В первом режиме каждый ряд зубьев звездочки входит в зацепление с соответствующим рядом роликов. При определенном шаге зубьев звездочки допустимая нагрузка будет ограниченной, поэтому увеличение количества соосных звездочек и соосных роликовых колец повышает допустимую для данного соединения нагрузку.
В некоторых вариантах осуществления изобретения ряд роликов может быть выполнен в виде роликового колеса. Таким образом, каждый ролик из этого ряда может вращаться вокруг штифта, а штифты могут быть установлены на кольцевом опорном элементе или между двумя круговыми опорными элементами. Преимущество такой конструкции заключается в ее легкости и высокой прочности. Основным видом отказа роликов является разрушение штифтов при сдвиге; при установке каждого ролика непосредственно на соответствующий штифт без каких-либо промежуточных вкладышей или втулок можно максимально увеличить диаметр штифта, обеспечивая тем самым его максимальную прочность на сдвиг.
Можно установить два ряда роликов, по одному ряду с каждой стороны кольцевого опорного элемента. Роликовое колесо также может быть выполнено в виде двух колец и может содержать два ряда роликов, каждый из которых проходит между кольцевым опорным элементом и соответствующим кольцом. Центральная часть каждого штифта между его противоположными торцами выполнена с возможностью крепления к кольцевому опорному элементу. В качестве альтернативы, каждый штифт выполнен с возможностью крепления к кольцевому опорному элементу одним своим концом.
Соседние ряды роликов и зубьев звездочки могут быть расположены с совпадением по фазе или со сдвигом по фазе на величину шага ролика/зуба.
Каждая звездочка может быть выполнена в виде одного колеса, содержащего два параллельных ряда зубьев. В качестве альтернативы, каждая звездочка может быть выполнена в виде двух соосно установленных звезд, каждое из которых содержит ряд зубьев. Между соседними рядами зубьев звездочек может находиться паз.
В других вариантах осуществления изобретения ряд роликов может быть выполнен в виде роликовой цепи (также известной как соединительная цепь или соединительная роликовая цепь), проходящей вокруг внешней окружности опорного элемента или прикрепленной к ней. Такая конструкция может обеспечивать более низкие затраты на изготовление, чем конструкция с описанным выше роликовым колесом. Как правило, роликовые цепи устанавливают вокруг одной или нескольких звездочек, чтобы цепь могла перемещаться относительно этих звездочек. В конструкции с роликовой цепью, закрепленной на опорном элементе, роликовой цепи не требуется изгибаться (т.е. нет необходимости в перемещении соседних звеньев относительно друг друга), что обеспечивает меньший износ цепи. Это, в свою очередь, обеспечивает увеличение срока службы цепи и снижение эксплуатационных расходов. Кроме того, при этом уменьшена вероятность отделения роликовой цепи от опорного элемента в случае отказа. Однако небольшой риск отделения цепи от опорного элемента в случае отказа все же остается, что делает варианты выполнения приводной системы с роликовой цепью менее предпочтительными, чем варианты исполнения с роликовым колесом. В вариантах выполнения роликовой цепи первая звездочка предпочтительно выполнена в виде цевочного зубчатого колеса.
Предпочтительно диаметр ведомого колеса больше диаметра ведущей шестерни. Такая конструкция обеспечивает передаточное отношение с увеличением крутящего момента и эффективное использование пространства.
Предпочтительно первая ведущая шестерня выполнена в виде первой звездочки, а ведомое колесо - в виде ряда роликов. Такая конструкция позволяет максимально увеличить количество роликов и, следовательно, способствует уменьшению возможного износа каждого ролика и увеличения срока службы ведомого колеса. Кроме того, такая конструкция упрощает техобслуживание, поскольку вероятно, что износ звездочки будет происходить быстрее, чем износ ряда роликов, и заменить ведущую шестерню проще, чем заменить ведомое колесо.
Предпочтительно приводная система выполнена с возможностью переключения из первого режима в третий режим, в котором первая ведущая шестерня не входит в зацепление с ведомым колесом. Таким образом, такую приводную систему можно применять для руления на земле, когда она работает в первом режиме, а для взлета, посадки или других операций, в которых требуется свободное вращение колеса, она работает в третьем режиме. В качестве альтернативы, между первой ведущей шестерней и электромотором может быть установлена муфта сцепления.
В некоторых вариантах осуществления изобретения приводная система содержит вторую ведущую шестерню, а электромотор выполнен с возможностью вращения второй ведущей шестерни посредством второй передачи, причем приводная система выполнена с возможностью переключения из первого режима во второй режим, в котором вторая ведущая шестерня входит в зацепление с ведомым колесом для приведения в движение ведомого колеса электромотором посредством второй передачи, причем или вторая приводная шестерня, или ведомое колесо выполнены в виде второй звездочки, а другая вторая ведущая шестерня или ведомое колесо содержат ряд роликов. При этом передаточное отношение первой передачи выше, чем второй передачи.
Большее передаточное отношение первой передачи обеспечивает более низкую скорость вращения колеса при приведении в движении ведомого колеса в первом режиме, а более низкое передаточное отношение второй передачи обеспечивает более высокую скорость вращения колеса при приведении в движение ведомого колеса при работе во втором режиме. Таким образом, эти варианты дают возможность использования приводной системы на низкой скорости с высоким крутящим моментом для руления на земле, когда система работает в первом режиме, и на высокой скорости с низким крутящим моментом для раскручивания колес перед посадкой, когда система работает во втором режиме.
Предпочтительно вторая ведущая шестерня выполнена в виде второй звездочки, а ведомое колесо выполнено в виде ряда роликов. Такая конструкция позволяет максимально увеличить количество роликов и, следовательно, обеспечить минимально возможный износ каждого ролика и увеличить срок службы ведомого колеса. Кроме того, такая конструкция упрощает техобслуживание, поскольку вероятно, что износ звездочки будет происходить быстрее, чем износ ряда роликов, а заменить ведущую шестерню проще, чем заменить ведомое колесо.
Предпочтительно приводная система выполнена с возможностью переключения между первым режимом, вторым режимом и третьим режимом, в котором ни первая, ни вторая ведущие шестерни не входят в зацепление с ведомым колесом. Таким образом, такая приводная система может быть использована для руления на земле в первом режиме, для раскручивания колес перед посадкой во втором режиме и для операций, во время которых требуется свободное вращение колес, например при взлете, в третьем режиме.
Изобретение также относится к шасси летательного аппарата с колесом и такой приводной системой, в которой ведомое колесо приводной системы закреплено на колесе.
Изобретение поясняется чертежами.
Краткое описание чертежей
На фиг. 1 показана приводная система согласно первому варианту осуществления изобретения, вид в изометрии;
на фиг. 2 - то же, вид сверху;
на фиг. 3 - то же, вид сбоку;
на фиг. 4 - отдельные компоненты приводной системы, показанной на фиг. 1, вид в изометрии;
на фиг. 5 - другие отдельные компоненты приводной системы, показанной на фиг. 1, вид в изометрии;
на фиг. 6 - отдельные компоненты приводной системы, показанной на фиг. 1, вид сбоку;
на фиг. 7А-7С - отдельные компоненты приводной системы, показанной на фиг. 1, в режиме руления на земле (А), в нейтральном положении (С) и в режиме раскручивания (В), виды сбоку;
на фиг. 8А и 8B - варианты выполнения ведомого колеса приводной системы, показанной на фиг. 1, виды в изометрии;
на фиг. 9 - приводная система согласно второму варианту осуществления изобретения, вид в изометрии (для ясности некоторые элементы не показаны);
на фиг. 10 - приводная система, показанная на фиг. 9, вид в изометрии;
на фиг. 11 - приводная система, показанная на фиг. 9, другой вид в изометрии;
на фиг. 12 - фрагмент приводной системы, показанной на фиг. 9, вид в увеличенном масштабе;
на фиг. 13 - ведущие шестерни и ведомое колесо в альтернативном выполнении, подходящие для использования в приводных системах как по первому, так и второму вариантам осуществления изобретения;
на фиг. 14A-14С - варианты выполнения ведущих шестерен для приводных систем по первому и второму вариантам осуществления изобретения, вид в изометрии;
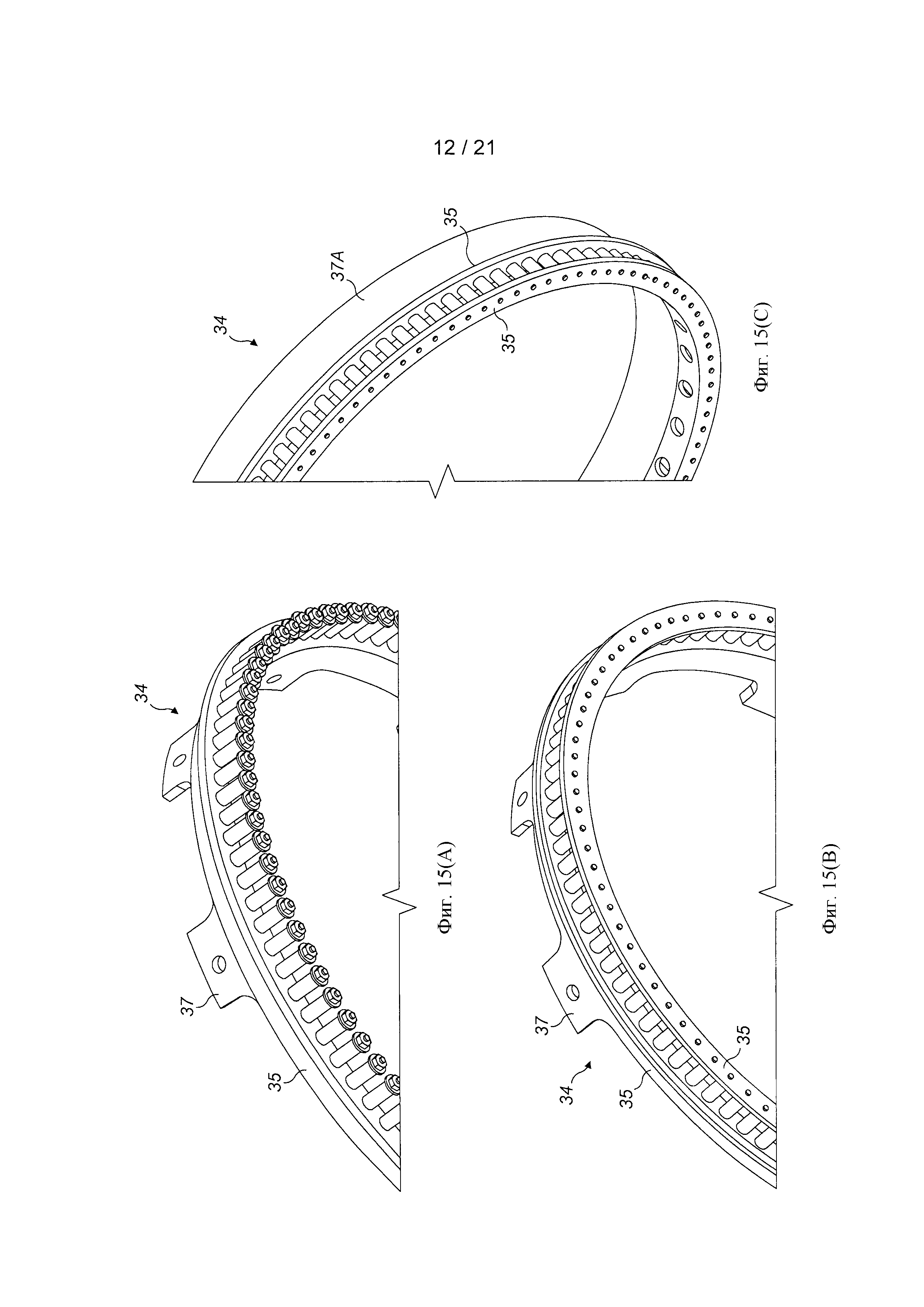
на фиг. 15A-15С - варианты выполнения ведомых шестерен для приводных систем по первому и второму вариантам осуществления изобретения, вид в изометрии;
на фиг. 16A-16С - схематично показаны варианты выполнения привода для приводных систем по первому и второму вариантам осуществления, виды сбоку.
на фиг. 17 - приводная система согласно третьему варианту осуществления изобретения (для ясности некоторые элементы не показаны), вид в изометрии;
на фиг. 18 - приводная система, показанная на фиг. 17 в положении, когда шестерня и колесо не зацепляются друг с другом, вид сбоку;
на фиг. 19 - приводная система, показанная на фиг. 17 в положении, когда шестерня и колесо находятся в зацеплении друг с другом, вид сбоку;
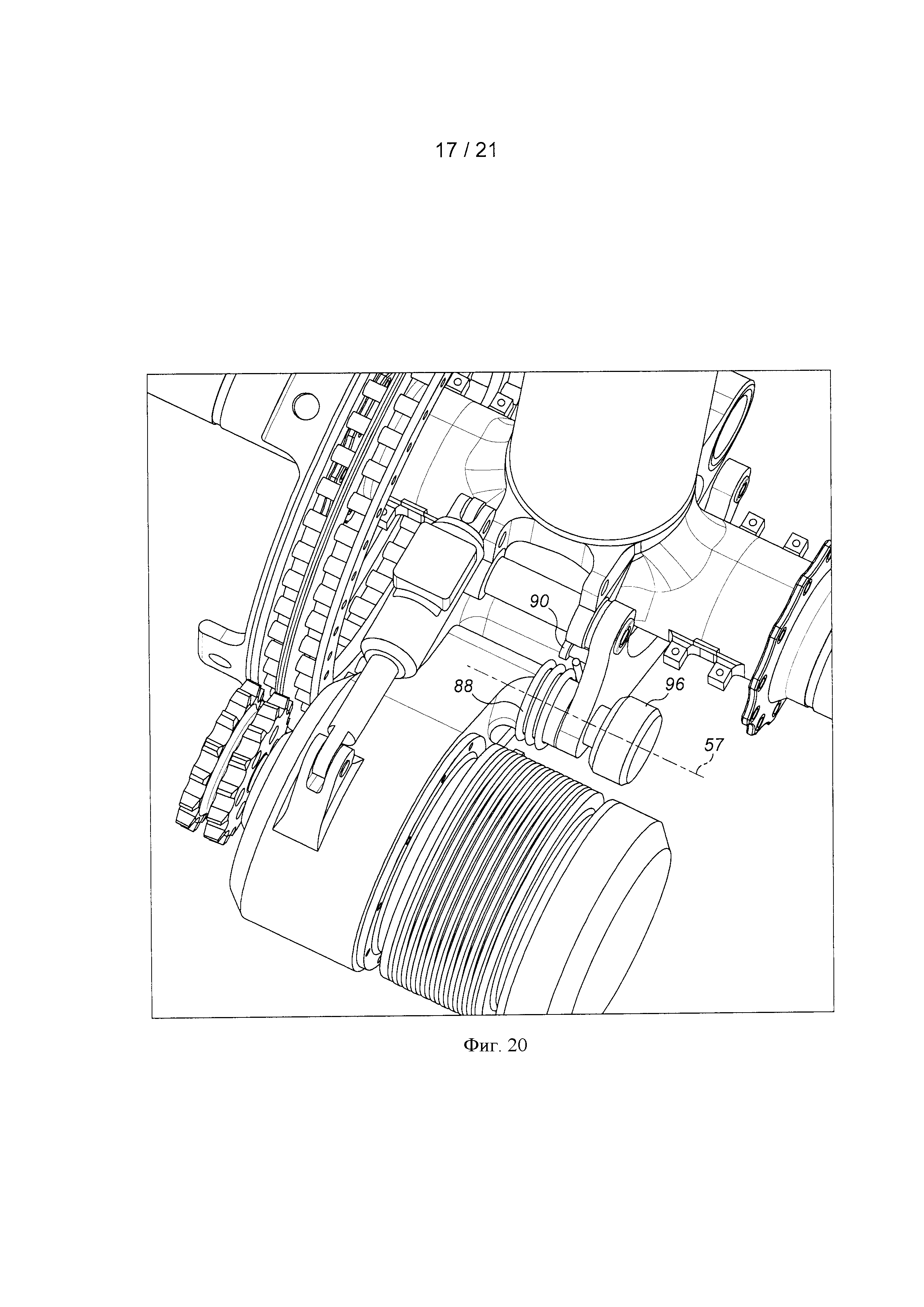
на фиг. 20 - приводная система, показанная на фиг. 17, вид в изометрии;
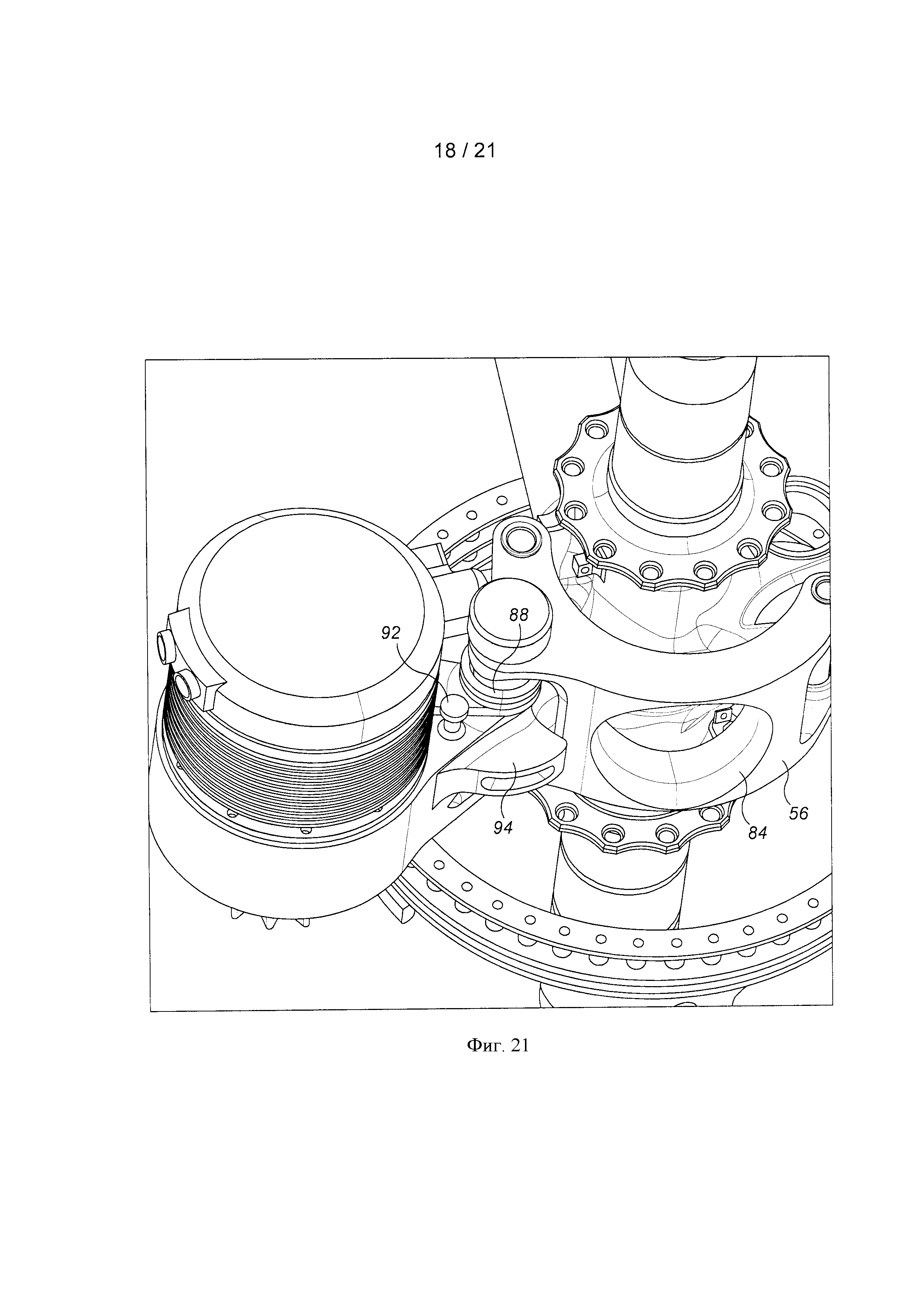
на фиг. 21 - приводная система, показанная на фиг. 17, другой вид в изометрии;
на фиг. 22A-22D - конструкция колеса шестерни приводной системы, показанной на фиг. 17;
на фиг. 23 - приводная система согласно третьему варианту осуществления изобретения с установкой роликов и звездочек со сдвигом по фазе.
Варианты осуществления изобретения
Первый вариант осуществления изобретения показан на фиг. 1-8. В представленном варианте стойка шасси имеет два колеса, однако изобретение может быть использовано и в стойке шасси с четырьмя и более колесами. В данном варианте показана основная стойка шасси (т.е. стойка шасси, прикрепленная к конструкции крыла самолета или фюзеляжа в области крыла), поскольку вес, воспринимаемый основной стойкой шасси, обеспечивает наилучшее сцепление между колесами и поверхностью земли, обеспечивая надежное руление на земле. Однако приводная система согласно изобретению также может быть использована и для передней стойки шасси (т.е. для управляемой стойки шасси, располагающейся в носовой части фюзеляжа).
Шасси 10 содержит телескопическую амортизационную основную стойку 12, содержащую верхнюю телескопическую часть 12а (главный узел крепления) и нижнюю телескопическую часть 12b (скользящий элемент). Верхняя телескопическая часть 12а верхним концом (не показан) крепится к фюзеляжу или крылу (не показаны). Нижняя телескопическая часть 12b несет ось 14, на которой установлена пара колес 16, по одному с каждой стороны от основной стойки (для ясности на фиг. 1 и 2 показано только одно колесо 16). Колеса 16 вращаются относительно оси 14, обеспечивая перемещение летательного аппарата по земле, например, при посадке или рулении.
Каждое колесо 16 содержит шину 17, опирающуюся на барабан 18 (также называемый ободом). На барабане 18 закреплено ведомое колесо 20 с возможностью вращения совместно с колесом 16. Ведомое колесо 20 представляет собой роликовое колесо 34, образованное двумя жесткими кольцами 35, соединенными между собой рядом расположенных по кругу роликов 36, образующих непрерывный ряд. Каждый ролик 36 установлен с возможностью вращения на штифте (не показаны). Штифты расположены между кольцами 35, обеспечивая их жесткое соединение. Одно из колец 35 содержит несколько соединительных выступов 37, обеспечивающих жесткое соединение кольца с барабаном 18.
На фиг. 7А-7С и 8B показан вариант выполнения ведомого колеса 20, в котором вокруг расширенного кольца 21 проходит роликовая цепь 30. Расширенное кольцо (или барабан) 21 жестко прикреплено к барабану 18 с помощью нескольких выступов 22, так что оно проходит от наружной окружности барабана 18 в сторону стойки 12. Роликовая цепь 30 закреплена вокруг наружной поверхности расширенного кольца 21, так что она образует вокруг кольца 21 непрерывный ряд. На фиг. 8B расширенное кольцо 21 и роликовая цепь 30 (также известная как соединительная цепь или соединительная роликовая цепь) показаны более подробно. Роликовая цепь 30 содержит множество соединенных друг с другом цепных элементов 31, каждый из которых содержит узел из двух роликов 32, установленных на параллельных осях. Каждый ролик 32 установлен с возможностью вращаться относительно вкладыша (не показан), установленного на штифте (не показан). Каждый цепной элемент 31 шарнирно соединен со своим соседним элементом парой соединительных элементов 33, так что ролики 32 располагаются непрерывным рядом или последовательно, и каждый элемент 31 может поворачиваться относительно своего соседнего элемента. Разумеется, поскольку роликовая цепь 30 зафиксирована на расширенном кольце 21, цепные элементы 31 не поворачиваются относительно друг друга.
Общим для двух показанных возможных конструкций ведомого колеса 20 является то, что ролики 32, 36 могут вращаться вокруг собственной оси (не показана), которая расположена на фиксированном расстоянии от оси вращения колеса 16 (которая совпадает с осью вращения расширенного кольца 21 или кольца 35). Конструкция роликового колеса, показанная на фиг. 8А, может оказаться предпочтительной, поскольку в ней можно использовать штифт большего диаметра для каждого ролика 36 роликового колеса 34, чем для каждого ролика 32 цепи 30, так что прочность на сдвиг каждого узла ролик-штифт в роликовом колесе 34 может быть намного выше, чем в цепи 30. Это обусловлено тем, что в роликовом колесе 34 отсутствует необходимость в дополнительном вкладыше между штифтом и роликом 36, поскольку штифт сам выполняет функцию вкладыша.
Приводная система 50 содержит электромотор 52, который осуществляет вращение ведущего вала 54, который вращает первую 60 и вторую 62 выходные звездочки с помощью редуктора 70. Первая 60 и вторая 62 звездочки, каждая из которых выполнена в виде колеса с радиально выступающими зубьями, могут входить в зацепление с роликами 32 роликовой цепи 30 (или роликами 36 роликового колеса 34). Хотя на чертежах показаны элементы приводной системы 50 лишь для привода одного из колес 16, предполагается, что точно такие же элементы будут установлены и на другом колесе 16. То есть предполагается, что для каждого колеса 16 будет установлена отдельная приводная система 50. Для стойки шасси 10 с четырьмя и более колесами 16 приводная система 50 может быть установлена на каждом из колес 16 или же только для двух из них. В вариантах, согласно которым приводные системы 50 установлены только на двух колесах 16, может потребоваться установка дополнительных электромоторов (не показаны) для обеспечения раскручивания неприводных колес перед посадкой, а руление на земле будет осуществляться двумя приводными системами 50. В других вариантах осуществления изобретения может оказаться возможным применение лишь одного электромотора 52 совместно для двух приводных систем 50. Таким образом, электромотор 52 может быть установлен так, что он будет вращать ведущий вал 54 каждой приводной системы.
Приводная система 50 поддерживается кронштейном 56, жестко прикрепленным к оси 14 стойки шасси и шарнирно соединенным с электромотором 52 с возможностью поворота вокруг оси 57, которая, как правило, расположена между соответствующими осями вращения 61, 63 звездочек 60, 62 (фиг. 3). В качестве альтернативы, приводная система 50 может быть установлена на верхней телескопической части 12а (на главном узле крепления) или нижней телескопической части 12b (скользящем элементе). Линейный привод 58, например безредукторный электромеханический ролико-винтового силовой привод с линейной характеристикой, расположен между кронштейном 56 (на конце, ближнем к оси 14) и электромотором 52. Таким образом, линейное перемещение привода 58 преобразуется в поворот приводной системы 50. Поскольку ось 57 расположена между осями 61, 63 звездочек 60, 62, приводная система 50 может поворачиваться между положением, в котором только первая звездочка 60 находится в зацеплении с роликовой цепью 30 (фиг. 7А), и положением, в котором только вторая звездочка 62 находится в зацеплении с роликовой цепью 30 (фиг. 7С). В положении между этими двумя крайними положениями ни одна из звездочек 60, 62 не входит в зацепление с роликовой цепью 30 (фиг. 7B). Такая шарнирная конструкция не допускает возможность одновременного зацепления и первой, и второй звездочек 60, 62 с роликовой цепью 30.
Редуктор 70 содержит первое, второе и третье взаимодействующие зубчатые колеса 71, 72 и 73 соответственно. Первое зубчатое колесо 71 закреплено на ведущем валу 54 и вращается вместе с этим валом. Третье зубчатое колесо 73 соединено с первой звездочкой 60, а второе зубчатое колесо 72 соединено с первым 71 и третьим 73 зубчатыми колесами. Таким образом, первое, второе и третье зубчатые колеса образуют первую передачу между ведущим валом 54 и первой звездочкой 60. В рассматриваемом варианте осуществления изобретения передаточное отношение на первой передаче составляет 40:1. Ведущий вал 54 соединен непосредственно со второй звездочкой 62, образуя вторую передачу, которая эффективно обходит редуктор. В рассматриваемом варианте осуществления изобретения передаточное отношение второй передачи составляет 5:1, т.е. намного ниже, чем первой передачи. Таким образом, приводная система 50 имеет три режима: режим низкой скорости с высоким крутящим моментом при рулении, когда электромотор 52 приводит в движение колеса 16 на первой передаче с помощью первой звездочки 60 (фиг. 7А); режим высокой скорости с низким крутящим моментом в режиме раскручивания колес, когда электромотор 52 приводит в движение колеса 16 на второй передаче с помощью второй звездочки 62 (фиг. 7С); и нейтральный режим (разъединенный), когда ни первая звездочка 60, ни вторая звездочка 62 не входят в зацепление с роликовой цепью (фиг. 7B). Режим руления подходит для разгона колеса 16 до скорости вращения 175 об/мин (что соответствует линейной скорости перемещения 20 узлов (37 км/ч)) при рулении на земле, а режим раскручивания используется для разгона колеса 16 до скоростей вращения около 1400 об/мин (что соответствовало бы линейной скорости перемещения по земле 160 узлов (296,3 км/м)) перед касанием с покрытием в момент приземления.
Электромотор 52, редуктор 70, а также первая и вторая звездочки 60, 62 установлены в корпусе для защиты компонентов от загрязняющих частиц окружающей среды и т.д., которые могут привести к возникновению неисправности.
В режиме руления линейный привод 58 (который может устанавливаться в исходное положение) может управлять крутящим моментом (или током) для прикладывания, по существу, постоянной нагрузки между первой звездочкой 60 и ведомым колесом 20, обеспечивая при этом определенную деформацию различных частей компонентов приводной системы 50 и в то же время предотвращая нежелательное разъединение. Управление линейным приводом 58 может производиться аналогично в режиме раскручивания, хотя нагрузки разъединения при раскручивании будут меньше, чем при рулении, что должно быть соответствующим образом учтено в логике регулирования. В нейтральном режиме управление линейным исполнительным механизмом 58 может быть по положению с целью обеспечения нейтрального положения, в котором ни одна из звездочек не входит в зацепление с ведомым колесом 20. Привод 58 может включать в себя электромеханический тормоз (не показан) или другое аналогичное блокирующее устройство, служащее для фиксации исполнительного механизма 58 в нейтральном положении.
Второй вариант осуществления изобретения представлен на фиг. 9-12. Этот вариант аналогичен первому варианту (для удобства аналогичные элементы обозначены одинаковыми номерами позиций) с одним отличием в приводной системе 50. Во втором варианте устройство содержит только первую звездочку 60 и не содержит вторую звездочку 62. Таким образом, имеется только одна звездочка 60, которая может входить в зацепление с ведомым колесом 20 для приведения в движение колеса 16, и только одна передача между звездочкой 60 и электромотором 52. На чертежах ведомое колесо 20 изображено в виде роликового колеса 34, описанного выше со ссылками на фиг. 8А, но также могут быть использованы показанные на фиг. 8B цепь 30 и расширенное кольцо 21.
Привод 58 выполнен с возможностью поворота приводной системы 50 между положением, в котором первая звездочка 60 входит в зацепление с роликовой цепью 30 (как показано на фиг. 9-12), и положением, в котором первая звездочка 60 не входит в зацепление с роликовой цепью 30. Таким образом, приводная система 50 имеет два режима, а именно: режим с низкой скоростью и высоким крутящим моментом при рулении, когда электромотор 52 приводит в движение колеса 16 на первой передаче с помощью первой звездочки 60; и нейтральный режим (разъединенный), в котором ни первая звездочка 60, ни вторая звездочка 62 не входят в зацепление с роликовой цепью.
Таким образом, приводная система 50 по второму варианту осуществления изобретения подходит для руления на земле (или может быть модифицирована для осуществления только раскручивания колес шасси перед посадкой), в то время как система привода по первому варианту подходит как для руления на земле, так и для раскручивания колес стойки шасси перед посадкой.
Как в первом, так и во втором вариантах одну или обе звездочки (первая звездочка 60 и вторая звездочка 62) можно заменить прямозубым цилиндрическим колесом (не показано) или зубчатым колесом другого типа, а ведомое колесо 20 можно заменить зубчатым венцом (не показана) или зубчатым колесом какого-либо другого типа. Такая конструкция показана на фиг. 13, на которой изображены первое прямозубое колесо 24 вместо первой звездочки 60 и второе прямозубое цилиндрическое колесо 25 вместо второй звездочки 62. Первое 24 и второе 25 прямозубые цилиндрические колеса входят в зацепление с зубчатым венцом 26, который закреплен на колесе шасси (не показано) с помощью упругого элемента 27 сопряжения на ведомом колесе 20. Упругий элемент 27 сопряжения служит для изоляции зубчатого венца 26 от нагрузок, приводящих к деформации колеса. Зубчатые колеса 24, 25, 26 в данной конструкции могут входить в зацепление друг с другом, образуя конструкции руления и/или раскручивания аналогично тому, как это было описано выше для первого и второго вариантов осуществления изобретения.
Как в первом, так и во втором вариантах осуществления изобретения или первая звездочка 60, или вторая звездочка 62, или обе звездочки могут быть заменены роликовым колесом, аналогичным изображенному на фиг. 8B, или роликовой цепью, закрепленной вокруг барабана, аналогично тому, как это показано на фиг. 8А. Такая конструкция показана на фиг. 14A и 14B, на которых представлен вариант выполнения, согласно которому первая звездочка (первая ведущая шестерня) заменена роликовой цепью (соединительной цепью), закрепленной вокруг барабана, и на фиг. 14C показан альтернативный вариант выполнения роликового колеса в качестве первой ведущей шестерни. В таких альтернативных вариантах ведомое колесо 20, показанное на Фиг. 14, выполнено в виде звездочки, подобной первой и второй ведущим звездочкам. Таким образом, принцип работы привода за счет зацепления между звездочкой и роликовым колесом/роликовой цепью может реализовываться, когда ведомое колесо выполнено в виде звездочки, а ведущая шестерня выполнена в виде роликового колеса/роликовой цепи и наоборот.
Как в первом, так и во втором вариантах осуществления изобретения роликовое колесо может быть выполнено несколькими различными способами, показанными на фиг. 15А, 15B и 15C. Роликовое колесо может содержать ролики 36, каждый из которых вращается на штифте, который одним концом закреплен на жестком кольце 35 (фиг. 15А). Как вариант, каждый штифт может быть закреплен каждым концом к одному из двух жестких колец 35 (фиг. 15B и 15C). Для повышения жесткости роликового колеса показанные на фиг. 15А и 15B соединительные выступы 37 могут быть заменены непрерывным выступающим ободом 37А, как показано на фиг. 15С.
На фиг. 16А-16С изображен альтернативный вариант выполнения узла привода 58 и шарнирного кронштейна 56, описанного выше. В этом варианте первая 60 и вторая 62 звездочки установлены на общей установочной пластине 51, соединенной со стойкой 12 шасси парой поворотных рычагов 53. Рычаги 53 могут быть шарнирно соединены либо с верхней телескопической частью 12а (главным установочным узлом), либо с нижней телескопической частью 12b (скользящим элементом) стойки шасси 10. Конструкция рычагов 53 в виде «параллелограмма» обеспечивает возможность перемещения установочной пластины 51 относительно ведомого колеса 20 без какого-либо поворота. Таким образом, первая 60 и вторая 62 звездочки могут перемещаться между положениями режима руления (фиг. 16А), нейтральным режимом (фиг. 16B) и режимом раскручивания (фиг. 16C).
Как в первом, так и во втором вариантах первая и вторая звездочки 60, 62 могут быть выполнены в виде множества соосных звездочек, каждая из которых входит в зацепление с одним из множества соосных роликовых колец, входящих в состав ведомого колеса 20, повышая номинальную нагрузку на узел. Например, в первом варианте первая и вторая звездочки 60, 62 могут содержать пару соосных звездочек, а ведомое колесо 20 может содержать соответствующую пару цепей 30, причем одна из соответствующих пар соосных звездочек входит в зацепление с соответствующей одной цепью 30. Далее приводится описание множества соосных звездочек и множества соосных роликовых колец для третьего варианта осуществления изобретения.
Третий вариант осуществления изобретения показан на фиг. 17-22. Этот вариант аналогичен второму варианту (для удобства аналогичные элементы обозначены одинаковыми номерами позиций), а основное отличие заключается в конструкции приводной системы 50 и ведомого колеса 20. В третьем варианте первая ведущая шестерня (звездочка) 60 выполнена в виде множества соосных звездочек 80A, 80B, а ведомое колесо 20 выполнено в виде множества соосных роликовых колец 82А, 82B, выполненных в виде роликового колеса 34. Соответствующие соосные звездочки 80А, 80B входят в зацепление с соосными роликовыми кольцами 82А, 82B.
В третьем варианте осуществления изобретения, как и во втором варианте, устройство содержит только первую звездочку 60 и не имеет второй звездочки 62. Таким образом, только одна звездочка 60 входит в зацепление с ведомым колесом 20 для приведения в движение колеса 16 одной передачей, расположенной между электромотором 52 и первой звездочкой 60. Приводная система 50 по третьему варианту выполнения подходит только для руления на земле (или может быть модифицирована для осуществления только раскручивания колес перед посадкой), в то время как приводная система по первому варианту подходит как для руления на земле, так и для раскручивании колес перед посадкой. Однако приводная система по первому варианту содержит первую и вторую звездочки, которые можно выполнить в виде множества соосных звездочек, способных входить в зацепление с ведомым колесом, выполненным в виде нескольких соосных роликовых колец. В третьем варианте существует еще одно преимущество, заключающееся в том, что первая звездочка 60 может использоваться для вращения колеса с частотой вращения, необходимой для руления на земле.
В третьем варианте выполнения приводная система 50 способна приводить в движение одно из колес 16 двухколесной стойки шасси, другое колесо шасси будет неприводным. Для стойки шасси, имеющей более двух колес, могут быть установлены несколько приводных систем 50.
Приводная система 50 по третьему варианту содержит электромотор 52, соединенный с планетарным редуктором 86, который вращает первую звездочку 60. Ось вращения первой звездочки 60 совпадает с осью вращения вала электромотора. Несмотря на то что общая осевая длина приводной системы 50 по третьему варианту больше, чем осевая длина приводных систем по первому и второму вариантам из-за наличия планетарного редуктора 86, это не вызывает проблем приведения в движение только одного колеса 16. Наоборот, в первом и втором вариантах осевая длина приводной системы значительно меньше для того, чтобы оба колеса 16 были приведены в движение этими приводными системами.
Разумеется, планетарный редуктор можно использовать вместо редукторов с параллельными осями, описанными для первого и второго вариантов, в частности, если осуществляется привод только одного колеса 16. В качестве альтернативы, редуктор с параллельными осями может быть использован вместо планетарного редуктора и в третьем варианте осуществления изобретения. Планетарный редуктор является более точным по своей конструкции, но редуктор с параллельными осями допускает более значительную степень свободы конструкции при настройке углов между осями шестерен и осью 57.
Электромотор 52 и планетарный редуктор 86 установлены в корпус для защиты компонентов от воздействия загрязняющих частиц и т.д., которые могут приводить к возникновению неисправностей.
Приводная система 50, поддерживаемая кронштейном 56, жестко прикреплена к нижней телескопической части 12b (скользящему элементу) стойки шасси и шарнирно соединена с электромотором 52 с возможностью поворота относительно оси 57. В качестве альтернативы, приводная система 50 может быть установлена на верхней телескопической части 12а (на основном установочном узле) или на оси 14. В кронштейне 56 выполнено отверстие 84, обеспечивающее доступ к месту установки домкрата в основании скользящего элемента. Между кронштейном 56 (на конце, ближнем к оси 14) и электромотором 52 расположен привод 58 в виде гидроцилиндра, электромеханического силового привода (ЭМСП) или электрогидравлического силового привода (ЭГСП). Таким образом, линейное перемещение привода 58 преобразуется во вращение приводной системы 50.
Привод 58 выполнен с возможностью поворота приводной системы 50 между положением, в котором первая звездочка 60 входит в зацепление с роликовым колесом 34 (как лучше всего показано на фиг. 19), и положением, в котором первая звездочка 60 не входит в зацепление с роликовым колесом 34 (как лучше всего показано на фиг. 20). Таким образом, приводная система 50 имеет два возможных режима, а именно: режим с низкой скоростью и высоким крутящим моментом при рулении на земле, когда электромотор 52 приводит в движение колеса 16 первой передачей с помощью первой звездочки 60; и нейтральный режим (разъединенный), в котором первая звездочка 60 не входит в зацепление с роликовым колесом 34.
Гидравлический привод 58, показанный на чертежах, может быть более предпочтительным, поскольку нагрузка, передаваемая на ведомое колесо 20 посредством первой звездочки 60 в режиме зацепления, может быть более приемлемой, чем нагрузка при использовании ЭГСП или ЭМСП. Такая нагрузка благоприятна для регулировки амортизации и нагрузки с целью предотвращения избыточной нагрузки при вхождении в зацепление ведомого колеса с первой звездочкой.
Как лучше видно на фиг. 20 и 21, приводная система 50 находится в нейтральном режиме (разомкнутый) за счет силы тяжести (когда летательный аппарат не перевернут) и торсионной пружины 88. Пружина 88 выполнена по существу в виде спирали, завитой вокруг оси 57. Первый конец пружины 88 упирается в штифт 90, выступающий из кронштейна 56, а второй конец - в штифт 92, выступающий из приводной системы 50. В результате усилия смещения пружины и силы тяжести концевой упор 94 приводной системы 50 упирается в кронштейн 56 на нижней стороне стойки шасси, предотвращая поворот приводной системы 50 относительно оси 57. Кроме того, привод 58 может включать в себя фиксирующее устройство, служащее для удержания приводной системы в расцепленном режиме во время взлета, полета и посадки.
Привод 58 (который может устанавливаться в исходное положение) может управлять крутящим моментом (или управляться током), прикладывая по существу постоянную нагрузку между первой звездочкой и ведомым колесом 20, обеспечивая тем самым определенную деформацию различных частей компонентов приводной системы 50 и предотвращая нежелательное разъединение. При расчете максимально допустимой нагрузки учитываются вибрационные и ударные нагрузки, и геометрия/кинематика системы могут быть оптимизированы для дополнительного снижения нагрузок на привод и/или подшипники.
Привод 58 может управлять усилием крутящего момента электромотора, требуемого для соответствия отклонениям/деформации последней передачи между первой звездочкой 60 и ведомым колесом 20. для управления положением привода может быть использована силовая обратная связь по замкнутому контуру. Силовая обратная связь может не требоваться, и в этом случае управление приводом может осуществляться по разомкнутому контуру, что ограничивает предъявляемые требования по датчикам и повышает надежность системы. Нагрузку можно задавать в зависимости от величины крутящего момента электромотора плюс допуск для обеспечения безопасного вхождения в зацепление, но с ограничением на износ. При этом может потребоваться применение датчика положения привода для точного определения, в каком положении он находится: в сцепленном положении или в расцепленном. В контуре управления приводом, находящимся в режиме зацепления, может использоваться вмонтированный в привод датчик углового положения 96, например индуктивный датчик угловых перемещений, или датчик линейного положения (не показан), такой как индуктивный датчик линейных перемещений.
Во время зацепления момент инерции (скорость) роликового колеса 34 и звездочки 60 необходимо согласовывать с помощью имеющейся обратной связи по частоте вращения электромотора (для скорости звездочки), и либо тахометра летательного аппарата (не показан), либо независимого датчика частоты вращения роликового колеса, такого как индуктивный датчик частоты вращения, используя ролики в качестве цели.
Ведомое колесо 20 подробно показано на фиг. 22A-22D. Ведомое колесо 20 выполнено в виде роликового колеса 34, образованного жесткими кольцами 35. Фланец, образующий непрерывный выступающий обод 37B с вырезами, выступает наружу в осевом направлении от внутреннего диаметра кольца 35. В качестве альтернативы, могут быть использованы соединительные выступы 37 (фиг. 4) или расширенный обод 37А (фиг. 15С). Непрерывный выступающий обод 37B обеспечивает жесткое соединение с барабаном 18.
На кольце 35 установлен ряд штифтов 38, отходящих наружу с обеих сторон колец 35. Штифты закреплены на кольце, например, как показано на фиг. 22, каждый штифт 38 проходит сквозь кольцо 35, и центральная часть каждого штифта между его противоположными торцами прикреплена к кольцу. В качестве альтернативы, могут быть установлены два ряда штифтов, при этом штифты первого ряда отходят от одной стороны кольца, а штифты второго ряда отходят в противоположном направлении от другой стороны кольца. Одним своим торцом штифты прикреплены к кольцу.
С одной стороны кольца 35 расположен первый ряд роликов 36А, установленных с возможностью вращения на штифтах 38, а с другой стороны кольца 35 расположен второй ряд роликов 36B, также установленных с возможностью вращения на штифтах 38. Ролики каждого ряда 36А, 36B равномерно расположены по окружности кольца, образуя ряд роликов.
Снаружи от первого и второго рядов роликов 36А, 36B установлены первое и второе боковые кольца 39А, 39B. Штифты 38, на которых установлены ролики первого ряда 36А, расположены между кольцом 35 и первым боковым кольцом 39А, а штифты 38, на которых установлены ролики второго ряда 36B, расположены между кольцом 35 и вторым боковым кольцом 39B. Таким образом, кольцо 35 образует центральный опорный элемент для поддержки штифтов, консольно установленных на нем и отходящих от него в противоположные стороны.
Штифты 38 могут быть установлены с помощью посадки с натягом, резьбового соединения, или каким-либо другим способом закрепляясь на кольце 35. Либо все, либо некоторые из штифтов могут быть закреплены на боковых кольцах 39А, 39B, например, с помощью болтового соединения. Торцы штифтов, не прикрепленных к боковым кольцам, могут входить в соответствующие углубления в боковых кольцах.
В первом и втором вариантах осуществления изобретения каждый ролик может вращаться вокруг собственной оси (не показана), расположенной на фиксированном расстоянии от оси вращения колеса 16, которая совпадает с осью вращения кольца 35. Первый и второй ряды роликов 36А, 36B образуют несколько соосных роликовых колец 82А, 82B. Соответствующие соосные звездочки 80А, 80B первой звездочки 60 могут входить в зацепление с соосными роликовыми кольцами 82А, 82B. Паз между звездочкой 80А, 80B может находиться в контакте с возможностью качения с внешним диаметром центрального опорного элемента (кольца 35) роликового колеса 34. Предпочтительно контакт с возможностью качения происходит на уровне внешнего радиуса роликов.
Несмотря на то что в рассматриваемом примере по третьему варианту ведомое колесо 20 выполнено в виде роликового колеса 34 с двумя соосными роликовыми кольцами 82А, 82B, следует иметь в виду, что, как вариант, могут иметься три и более роликовых колец. Это может быть осуществлено, например, путем введения в конструкцию нескольких колец 35, между которыми устанавливаются ролики. Разумеется, в случае применения более двух соосных роликовых колец первая звездочка 60 должна содержать соответствующее количество соосных звездочек, входящих в зацепление с соосными роликовыми кольцами.
Увеличение вдвое количества соосных роликовых колец/звездочек от одного (в первом и втором вариантах осуществления) до двух приблизительно в два раза уменьшает нагрузку, приходящуюся на каждое роликовое кольцо/звездочку. Для данного шага зацепления роликового колеса/звездочки допустимая нагрузка будет ограниченной. При большем шаге, соответственно, увеличивается допустимый крутящий момент, но передаточное отношение пары «роликовое колесо-звездочка» уменьшается. Передаточное отношение, необходимое для обеспечения требуемой скорости руления на земле, скорее всего будет являться ограничивающим фактором при определении того, сколько соосных рядов роликов/звездочек потребуется для данного крутящего момента, создаваемого электромотором. Номинальный крутящий момент электромотора в третьем варианте приблизительно вдвое выше расчетных крутящих моментов электромоторов в первом и втором вариантах, поскольку в третьем варианте осуществляется привод только одного колеса стойки шасси, а в первом и втором вариантах осуществляется привод двух колес стойки шасси.
В третьем варианте осуществления изобретения, показанном на фиг. 17-22, соосные роликовые кольца расположены симметрично (имеется в виду, симметрично по фазе) с обеих сторон кольца 35. Однако несколько рядов роликов может быть расположено со сдвигом по фазе, как показано на фиг. 23. Ролики первого ряда 36А смещены по углу вокруг оси вращения кольца 35 относительно роликов второго ряда 36B. Угловое смещение p2 может составлять любую часть шага p1 роликов, и в примере, показанном на фиг. 23, угловое смещение p2 составляет половину шага p1. Разумеется, если соосные ряды роликов установлены со сдвигом по фазе, точно так же, со сдвигом по фазе, должны быть установлены и соосные звездочки 80А, 80B. Сдвиг по фазе рядов роликов может улучшать зацепление со звездочками и уменьшать вибрацию и износ роликового колеса 34 и звездочки 60. В маловероятном случае выхода из строя одного ролика сдвинутые по фазе ролики обеспечивают устойчивость к отказам.
Аналогично конструкции, показанной на фиг. 13, ведомое колесо 20 по третьему варианту может быть закреплено на колесе с помощью упругого элемента сопряжения, например резиновой втулки, служащей для изоляции ведомого колеса от нагрузок, вызывающих деформацию колеса.
В представленном примере реализации третьего варианта осуществления изобретения, в котором стойка шасси содержит два колеса, в движение приводится только одно колесо, вероятнее всего будут приводиться в движение внешние колеса двух стоек шасси относительно центральной линии летательного аппарата. В качестве альтернативы, приводными могут быть внутренние колеса. Маловероятно, что будет осуществляться привод одного внутреннего и одного внешнего колеса, хотя вероятность такого конструктивного решения все же существует. При приведении в движение только внешних или только внутренних колец, приводной системе необходимо быть симметричной, что может привести к увеличению стоимости. Для максимальной унификации деталей приводная система 50 может содержать узлы крепления для привода 58 с обеих сторон планетарного редуктора, концевой упор 94 также может быть выполнен с обеих сторон. При таких минимальных изменениях приводную систему 50 можно будет устанавливать с обеих сторон летательного аппарата. Использование планетарного редуктора будет более предпочтительным, чем использование редуктора с параллельными осями.
Множество соосных звездочек - первых звездочек и/или вторых звездочек могут представлять собой отдельные звездочки в виде колес, каждое из которых содержит радиально выступающие зубья. Такие звездочки в виде колес могут устанавливаться рядом друг с другом на одной оси. В качестве альтернативы, множество соосных первых звездочек и/или вторых звездочек могут представлять собой единую звездочку в виде колеса, содержащую множество расположенных рядом друг с другом и отделенных пазом друг от друга рядов радиально выступающих зубьев.
В первом, втором и третьем вариантах осуществления изобретения электромотор приводной системы шарнирно установлен на конструкции стойки шасси для его поворота и зацепления с ведущей шестерней/ведущими шестернями. В альтернативном варианте электромотор может быть зафиксирован относительно неподпружиненной части конструкции стойки шасси, например нижней телескопической части 12b (скользящего элемента). Электромотор может приводить в движение первую прямозубую цилиндрическую шестерню, ось вращения которой также зафиксирована относительно конструкции стойки шасси. При зацеплении первой прямозубой цилиндрической шестерни со второй прямозубой цилиндрической шестерней, ось вращения которой выполнена с возможностью отклонения на малый угол по дуге на фиксированное расстояние от оси вращения указанной первой шестерни. Ведущая шестерня, например описанная выше первая звездочка, установлена соосно со второй прямозубой цилиндрической шестерней. При вращении вала электромотора ведущая шестерня может перемещаться по дуге между первым режимом, в котором ведущая шестерня находится в зацеплении с ведомым колесом, и вторым положением, в котором ведущая шестерня не входит в зацепление с ведомым колесом. Первая прямозубая цилиндрическая шестерня может приводиться в движение электромотором посредством планетарного редуктора. При этом первая прямозубая цилиндрическая шестерня, планетарный редуктор и вал электромотора расположены соосно. Прямозубые цилиндрические шестерни могут быть заизолированы. Либо первая ведущая шестерня, либо ведомое колесо могут быть выполнены в виде одной звездочки или множества соосных звездочек, а другая первая ведущая шестерня или ведомое колесо могут быть выполнены в виде одиночного роликового колеса или множества соосных роликовых колец, как описано выше.
Реферат
Изобретение относится к приводным системам для вращения одного или нескольких колес шасси летательного аппарата при рулении на земле и/или раскручивании колес шасси перед посадкой. Приводная система содержит электромотор, выполненный с возможностью вращения первой ведущей шестерни посредством первой передачи, и ведомое колесо, выполненное с возможностью крепления к колесу. При этом приводная система имеет первый режим, в котором первая ведущая шестерня входит в зацепление с ведомым колесом для приведения его в движение электромотором посредством первой передачи. Причем или первая ведущая шестерня, или ведомое колесо выполнены в виде первой звездочки, а другая первая ведущая шестерня или другое ведомое колесо содержат ряд роликов, установленных в два ряда и расположенных по кольцу. Каждый ролик выполнен с возможностью вращения вокруг собственной оси. Причем каждый ролик из ряда установлен с возможностью вращения вокруг штифта, а штифты закреплены на кольцевом опорном элементе. Достигается повышение надежности и устойчивости к деформации колеса и отклонению осей между ведущим и ведомым колесами. 2 н. и 13 з.п. ф-лы, 35 ил.
Комментарии