Система управления передними фарами - RU2691939C1
Код документа: RU2691939C1
Чертежи




Описание
Область техники
Настоящее изобретение относится к системе управления передними фарами, которая управляет передними фарами движущегося объекта.
Уровень техники
В качестве устройства в смежной области техники, известно устройство, которое пытается реализовывать более надлежащее окружение вождения посредством управления рисунком освещения (например, диапазоном освещения, количеством света в виде освещения и т.п.) передних фар, смонтированных в движущемся объекте, таком как транспортное средство. Например, в публикации не прошедшей экспертизу заявки на патент Японии № 2016-107861 (JP 2016-107861 А) раскрыта технология, которая управляет диапазоном освещения светодиодных (светодиодных) передних фар, за счет этого подавляя проявление бликов, возникающее из-за разности между яркостью и темнотой поверхности дороги во время освещения передними фарами и улучшая характеристики пространственного распознавания окружающего зрения.
Сущность изобретения
Считается, что оптимальный рисунок освещения передних фар изменяется, например, согласно различным условиям (т.е. окружениям движения), таким как погода, временной отрезок и состояния других транспортных средств. По этой причине, предпочтительно, если задается рисунок освещения передних фар, подходящих для каждого окружения движения. В частности, желательно, если рисунок освещения, подходящий для текущего окружения движения, задается таким образом, что он надлежащим образом выбирается из множества рисунков освещения, реализуемых посредством передних фар.
Тем не менее, определенно нелегко задавать рисунок освещения, подходящий для окружения движения, заранее. Помимо этого, число рисунков освещения, реализуемых посредством передних фар, увеличивается (т.е. варианты рисунков освещения увеличиваются), за счет чего труднее задавать оптимальный рисунок освещения. Например, в случае если существуют десятки миллионов или более рисунков освещения передних фар, много времени и усилий необходимо для того, чтобы находить оптимальный рисунок освещения из числа рисунков освещения.
Изобретение предоставляет систему управления передними фарами, допускающую соответствующее управление рисунком освещения передних фар согласно окружению движения.
Первый аспект изобретения относится к системе управления передними фарами, которая управляет передними фарами движущегося объекта. Движущийся объект включает в себя передние фары, включающие в себя множество светоизлучающих модулей и модуль формирования изображений, выполненный с возможностью захватывать изображения обстановки впереди движущегося объекта. Система управления передними фарами включает в себя контроллер рисунков освещения, контроллер обработки изображений и модуль обучения. Контроллер рисунков освещения выполнен с возможностью осуществлять управление для изменения, по меньшей мере, одного из присутствия или отсутствия светового излучения и степени светового излучения каждого из светоизлучающих модулей передних фар, чтобы изменять рисунок освещения передних фар на один из множества рисунков освещения. Контроллер обработки изображений выполнен с возможностью осуществлять управление таким образом, что модуль формирования изображений захватывает изображения обстановки впереди для каждого из рисунков освещения, чтобы получать захваченные изображения. Модуль обучения выполнен с возможностью проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди, на основе захваченных изображений, захваченных для каждого из рисунков освещения.
В системе управления передними фарами согласно первому аспекту изобретения, контроллер рисунков освещения может быть выполнен с возможностью изменять рисунок освещения передних фар на один из множества рисунков освещения во время перемещения движущегося объекта. Контроллер обработки изображений может быть выполнен с возможностью осуществлять управление таким образом, что модуль формирования изображений захватывает изображения обстановки впереди для каждого из рисунков освещения во время перемещения движущегося объекта, чтобы получать захваченные изображения.
В системе управления передними фарами согласно первому аспекту изобретения, контроллер рисунков освещения может быть выполнен с возможностью изменять рисунок освещения передних фар на один из множества рисунков освещения в заданный период, который является небольшим до такой степени, что считается, что обстановка впереди не изменяется, даже если движущийся объект перемещается. Модуль обучения может быть выполнен с возможностью использовать захваченные изображения, захваченные в заданный период для обучения, в качестве захваченных изображений, захваченных в состоянии, в котором обстановка впереди является идентичной.
В системе управления передними фарами согласно первому аспекту изобретения, модуль обучения может быть выполнен с возможностью вычислять коэффициент распознавания объекта впереди движущегося объекта в захваченных изображениях и осуществлять обучение в отношении рисунка освещения, имеющего более высокий коэффициент распознавания, чем рисунок освещения, который является более подходящим для обстановки впереди.
В системе управления передними фарами согласно первому аспекту изобретения, контроллер рисунков освещения может быть выполнен с возможностью i) выбирать множество рисунков освещения, имеющих высокую вероятность приемлемости для обстановки впереди на основе предыдущих результатов обучения модуля обучения, и ii) изменять рисунок освещения передних фар на выбранные рисунки освещения во время последующего обучения.
В системе управления передними фарами согласно первому аспекту изобретения, контроллер рисунков освещения и контроллер обработки изображений могут монтироваться в движущемся объекте. Модуль обучения может монтироваться в устройстве за пределами движущегося объекта.
В системе управления передними фарами согласно первому аспекту изобретения, обстановка впереди может задаваться посредством, по меньшей мере, одного из временного отрезка, погоды, яркости и присутствия или отсутствия другого движущегося объекта и помехи.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, показывающей конфигурацию системы управления передними фарами согласно варианту осуществления;
Фиг. 2 является концептуальной схемой, показывающей рисунок освещения передних фар;
Фиг. 3 является блок-схемой последовательности операций способа, показывающей последовательность операций операции во время обучения в системе управления передними фарами согласно варианту осуществления;
Фиг. 4A является видом сверху, показывающим пример данных изображений, полученных во время операции обучения;
Фиг. 4B является видом сверху, показывающим пример данных изображений, полученных во время операции обучения;
Фиг. 4C является видом сверху, показывающим пример данных изображений, полученных во время операции обучения;
Фиг. 4D является видом сверху, показывающим пример данных изображений, полученных во время операции обучения;
Фиг. 4E является видом сверху, показывающим пример данных изображений, полученных во время операции обучения;
Фиг. 5 является концептуальной схемой, показывающей изменение числа рисунков освещения, используемых во время операции обучения; и
Фиг. 6 является блок-схемой последовательности операций способа, показывающей последовательность операций операции во время автоматического управления рисунками освещения в системе управления передними фарами согласно варианту осуществления.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе, описывается вариант осуществления системы управления передними фарами со ссылкой на чертежи. В варианте осуществления, в качестве примера описывается система, которая управляет передними фарами, смонтированными в транспортном средстве.
Конфигурация устройства
Ниже описывается конфигурация системы управления передними фарами согласно варианту осуществления со ссылкой на фиг. 1. Фиг. 1 является блок-схемой, показывающей конфигурацию системы управления передними фарами согласно варианту осуществления.
Как показано на фиг. 1, система 10 управления передними фарами согласно варианту осуществления составляет, например, часть электронного модуля управления (ECU), смонтированного в транспортном средстве, и включает в себя контроллер 110 рисунков освещения, контроллер 120 обработки изображений и модуль 130 обучения в качестве блоков обработки, реализованных физически или логически в системе 10 управления передними фарами.
Контроллер 110 рисунков освещения может управлять рисунком освещения передних фар 20. Ниже подробно описывается рисунок освещения передних фар 20 со ссылкой на фиг. 2. Фиг. 2 является концептуальной схемой, показывающей рисунок освещения передних фар.
Как показано на фиг. 2, передние фары 20 согласно варианту осуществления состоят из светодиодной матрицы "четыре по вертикали и четыре по горизонтали". Светодиод в данном документе представляет собой конкретный пример "светоизлучающего модуля" в дополнительном примечании, описанном ниже. Контроллер 110 рисунков освещения, соответственно, управляет состояниями подсвечивания 16 частей в совокупности светодиодной матрицы, за счет этого реализуя различные рисунки освещения. В частности, каждая из 16 частей светодиодной матрицы переключается на одно из "включения (т.е. состояния включения с высокой яркостью)", "темный (т.е. состояния включения с низкой яркостью)" и "выключение", за счет этого реализуя множество рисунков освещения. Передние фары 20, описанные выше, предоставляются на каждой из правой и левой сторон транспортного средства (всего две). Соответственно, в случае если все рисунки освещения комбинируются, может реализовываться большое количество рисунков освещения.
Число светодиодной матрицы, включенной в передние фары 20, может быть меньшим или большим числа, показанного на фиг. 2. Состояние подсвечивания каждого из светодиодов не ограничено в качестве переключения на трех стадиях (т.е. "включение", "темное" и "выключение"), как описано выше, и, например, может переключаться на двух стадиях "включение" и "выключение" либо может быть выполнено с возможностью реализовывать регулирование яркостью на большем числе стадий.
Возвращаясь к фиг. 1, контроллер 120 обработки изображений получает данные изображений, указывающие обстановку впереди транспортного средства, из камеры 30 каждый раз, когда рисунок освещения передних фар 20 переключается посредством контроллера 110 рисунков освещения. Камера 30 представляет собой конкретный пример "модуля формирования изображений" в дополнительном примечании, описанном ниже, и представляет собой бортовую камеру, которая захватывает изображения обстановки впереди транспортного средства. Данные изображений, полученные посредством контроллера 120 обработки изображений, выводятся в модуль 130 обучения. Контроллер 120 обработки изображений может выполнять различные виды обработки (например, обработку с помощью фильтра и т.п.) для полученных данных изображений.
Модуль 130 обучения проводит обучение в отношении рисунка освещения передних фар 20, подходящего для обстановки впереди транспортного средства, с использованием множества фрагментов данных изображений, вводимых из контроллера 120 обработки изображений. Обстановка впереди задается, например, согласно различным условиям, например, из временного отрезка, погоды, яркости и присутствия или отсутствия помех, таких как другие транспортные средства или пешеходы. В дальнейшем в этом документе, обстановка впереди может надлежащим образом называться "окружением движения". Ниже подробно описывается конкретный контент обучения, выполняемого посредством модуля 130 обучения.
Хотя не ограничено конкретным образом, предпочтительно, если контроллер 110 рисунков освещения и контроллер 120 обработки изображений в системе 10 управления передними фарами монтируются в транспортном средстве; тем не менее, функция модуля 130 обучения может предоставляться на сервере, в облаке и т.п. за пределами транспортного средства. В этом случае, контроллер 110 рисунков освещения и контроллер 120 обработки изображений, смонтированные в транспортном средстве, и модуль 130 обучения за пределами транспортного средства выполнены с возможностью осуществлять связь друг с другом.
Операция обучения
Ниже описывается операция обучения (т.е. операция для того, чтобы проводить обучение в отношении рисунка освещения согласно окружению движения), которая выполняется посредством системы 10 управления передними фарами согласно варианту осуществления, со ссылкой на фиг. 3. Фиг. 3 является блок-схемой последовательности операций способа, показывающей последовательность операций операции во время обучения рисунков освещения в системе управления передними фарами согласно варианту осуществления.
Как показано на фиг. 3, во время операции обучения, во-первых, контроллер 110 рисунков освещения осуществляет управление таким образом, что рисунок освещения передних фар 20 переключается (этап S101). Таким образом, состояние подсвечивания каждого из светодиодов, включенных в передние фары 20, управляется таким образом, что появляется рисунок освещения, отличающийся от предыдущего рисунка освещения. После этого, контроллер 120 обработки изображений получает данные изображений, впереди транспортного средства, подсвечиваемого с рисунком освещения после переключения (этап S102). Хотя не ограничено конкретным образом, предпочтительно, если для того, чтобы получать данные изображений согласно различным окружениям движения, вышеуказанная обработка выполняется в состоянии, в котором транспортное средство движется (т.е. в состоянии, в котором окружение движения изменяется).
Контроллер 110 рисунков освещения сохраняет число или тип рисунков освещения, используемых в операции обучения, и в случае, если выполняется определение в отношении того, что переключение на все рисунки освещения завершается (этап S103: "Да"), переходит к обработке после этапа S104. В случае если выполняется определение в отношении того, что переключение на все рисунки освещения, используемые в операции обучения, не завершается (этап S103: "Нет"), процесс повторяется от этапа S101. Таким образом, обработка для переключения рисунка освещения передних фар 20 и получения данных изображений в это время многократно выполняется. Вследствие этого, данные изображений получаются для каждого из множества рисунков освещения, используемых в операции обучения.
Здесь, подробно описываются множество фрагментов данных изображений, полученных во время операции обучения, со ссылкой на фиг. 4A-4E. Фиг. 4A-4E являются концептуальными схемами, показывающими пример данных изображений, полученных во время операции обучения.
Как показано на фиг. 4A-4E, контроллер 120 обработки изображений последовательно получает изображения, соответствующие рисункам освещения. Например, фиг. 4A показывает данные изображений в случае, если все светодиоды "включены". Фиг. 4B показывает данные изображений в случае, если светодиоды, соответствующие правой конечной области, "выключены", и светодиоды, соответствующие другим областям, "включены". Фиг. 4C показывает данные изображений в случае, если светодиоды, соответствующие области левой половины, "выключены", и светодиоды, соответствующие другим областям, "включены". Фиг. 4D показывает данные изображений в случае, если светодиоды, соответствующие области нижней половины, являются "темными", и светодиоды, соответствующие другим областям, "включены". Фиг. 4E показывает данные изображений в случае, если светодиоды, соответствующие нижней конечной области, "выключены", светодиоды, соответствующие области чуть выше нижней конечной области, являются "темными", и светодиоды, соответствующие другим областям, "включены".
Хотя не ограничено конкретным образом, предпочтительно, если данные изображений, описанные выше, получаются в максимально возможной степени, чтобы выполнять эффективное обучение. Соответственно, рисунок освещения передних фар 20 переключается максимально быстро со скоростью согласно скорости срабатывания затвора камеры. В той мере, в какой рисунок освещения передних фар 20 может переключаться на высокой скорости, даже в случае, если транспортное средство движется, множество изображений может получаться при практически идентичном условии (другими словами, в состоянии, в котором обстановка впереди не изменяется). В этом случае, можно легко определять то, какой рисунок освещения является подходящим для обстановки впереди во время формирования изображений посредством сравнения полученных данных изображений друг с другом.
Возвращаясь к фиг. 3, после того, как данные изображений получаются, примечание (т.е. применение корректных ответных данных) выполняется для каждого фрагмента полученных данных изображений (этап S104). Альтернативно, примечание этапа S104 может выполняться параллельно с обработкой этапа S102 и этапа S103 (т.е. обработкой для переключения рисунка освещения и обработкой для получения данных изображений). Корректные ответные данные включают в себя, например, информацию (например, позиционную информацию пешеходов, велосипедов, других транспортных средств и других помех), связанную с объектами в диапазоне формирования изображений для изображения. Хотя нетрудно подготавливать корректные ответные данные для обучения при моделировании и т.п. перед заводской поставкой, затруднительно подготавливать корректные ответные данные для обучения в ходе движения в отношении транспортного средства после поставки. Как описано выше, в случае если затруднительно подготавливать корректные ответные данные, обучение без корректных ответных данных может выполняться. Таким образом, обработка этапа S104 может надлежащим образом опускаться.
Затем, несколько наборов обучающих данных создаются из множества фрагментов полученных данных изображений (этап S105). Здесь, хотя три набора обучающих данных (набор A данных, набор B данных и набор C данных) создаются в качестве примера, большее число наборов обучающих данных может создаваться. Наборы обучающих данных могут просто сортироваться посредством заданного числа захваченных изображений или могут классифицироваться согласно любому правилу. Например, наборы обучающих данных могут создаваться посредством выполнения обработки распознавания изображений для множества фрагментов данных изображений и классификации данных изображений согласно окружениям движения, оцененным из результатов распознавания. Таким образом, можно надлежащим образом выполнять обучение для каждого окружения движения. Поскольку считается, что окружение движения изменяется во времени, даже в случае, если каждый фрагмент данных изображений классифицируется согласно времени получения (другими словами, времени формирования изображений), можно создавать набор обучающих данных для каждого окружения движения.
После создания обучающих данных, модуль 130 обучения выполняет обработку распознавания для каждого набора данных. В частности, обучение (этап S106) и оценка (этап S107) с использованием набора A данных, обучение (этап S108) и оценка (этап S109) с использованием набора B данных и обучение (этап S110) и оценка (этап S111) с использованием набора C данных выполняются параллельно. Модуль 130 обучения проводит обучение в отношении рисунка освещения, допускающего повышение коэффициента распознавания объекта (например, пешехода, другого транспортного средства и т.п.) в изображении с использованием нейронной сети. В частности, модуль 130 обучения выполняет обработку распознавания изображений для данных изображений, включенных в каждый набор данных, чтобы вычислять коэффициент распознавания объекта в изображении. Затем множество рисунков освещения ранжируются в порядке по убыванию коэффициента распознавания посредством окружения движения, и проводится обучение в отношении рисунка освещения, имеющего более высокий коэффициент распознавания, в качестве рисунка освещения, подходящего для окружения движения. В отношении способа обучения с использованием нейронной сети, существующая технология может надлежащим образом использоваться, и в силу этого более подробное описание опускается.
В случае если обучение с использованием каждого набора данных в отношении концов, выполняется определение в отношении того, завершается или нет все обучение (этап S112). В отношении условия завершения обучения, соответствующее условие (например, условие, допускающее определение того, что достаточное обучение уже выполнено) может задаваться заранее. Как описано ниже, в случае если операция обучения согласно варианту осуществления совершенствуется, рисунки освещения, используемые при обучении, постепенно снижаются. По этой причине, в случае если число рисунков освещения, используемых при обучении, меньше заданного порогового значения, все обучение может завершаться.
В случае если выполняется определение в отношении того, чтобы завершать обучение (этап S112: "Да"), последовательность операции обучения завершается. В случае если выполняется определение в отношении того, чтобы не завершать обучение (этап S112: "Нет"), множество рисунков освещения (например, рисунки освещения, имеющие коэффициент распознавания лучших 10%), имеющих высокий коэффициент распознавания, выбираются из множества рисунков освещения, используемых при обучении на основе предыдущего результата обучения (этап S113). Затем после того, как выбранные рисунки освещения задаются в качестве рисунков освещения, используемых в следующей операции обучения, процесс выполняется от этапа S101 снова. Таким образом, идентичная операция обучения выполняется снова только с использованием рисунков освещения, определенных как имеющие более высокий коэффициент распознавания.
Здесь, подробно описывается изменение числа рисунков освещения, используемых в операции обучения, со ссылкой на фиг. 5. Фиг. 5 является концептуальной схемой, показывающей изменение числа рисунков освещения, используемых во время операции обучения.
Как показано на фиг. 5, в операции обучения согласно варианту осуществления, поскольку используемые рисунки освещения снижаются каждый раз, когда операция обучения повторяется, можно выполнять обучение чрезвычайно эффективно. Например, в первом обучении, предполагается, что сто миллионов рисунков освещения переключаются, и получаются сто миллионов фрагментов данных изображений. Как описано выше, в случае если чрезвычайно большой объем обучающих данных используется, более точный результат обучения может ожидаться, в то время как период (включающий в себя период для того, чтобы получать обучающие данные), необходимый для обучения, сильно продлевается. Соответственно, точность обучения является высокой, но трудно сказать, что выполняется эффективное обучение. Напротив, в варианте осуществления, во втором обучении, десять миллионов рисунков, допускающих определение как имеющих высокий коэффициент распознавания, выбираются из результата первого обучения, и операция обучения выполняется с использованием десяти миллионов рисунков. Как описано выше, в случае если операция обучения выполняется только с использованием рисунка освещения, имеющего высокий коэффициент распознавания, можно уменьшать период, необходимый для обучения, без значительного понижения точности обучения. Аналогично, при третьем обучении, один миллион рисунков, допускающих определение как имеющих высокий коэффициент распознавания, выбираются из результата второго обучения, и операция обучения выполняется с использованием одного миллиона рисунков. Помимо этого, в четвертом обучении, сто тысяч рисунков, допускающих определение как имеющих высокий коэффициент распознавания, выбираются из результата третьего обучения, и операция обучения выполняется с использованием ста тысяч рисунков. В случае если операция обучения повторяется, как описано выше, можно эффективно совершенствовать обучение при постепенном снижении рисунков освещения, используемых при обучении.
Операция автоматического управления
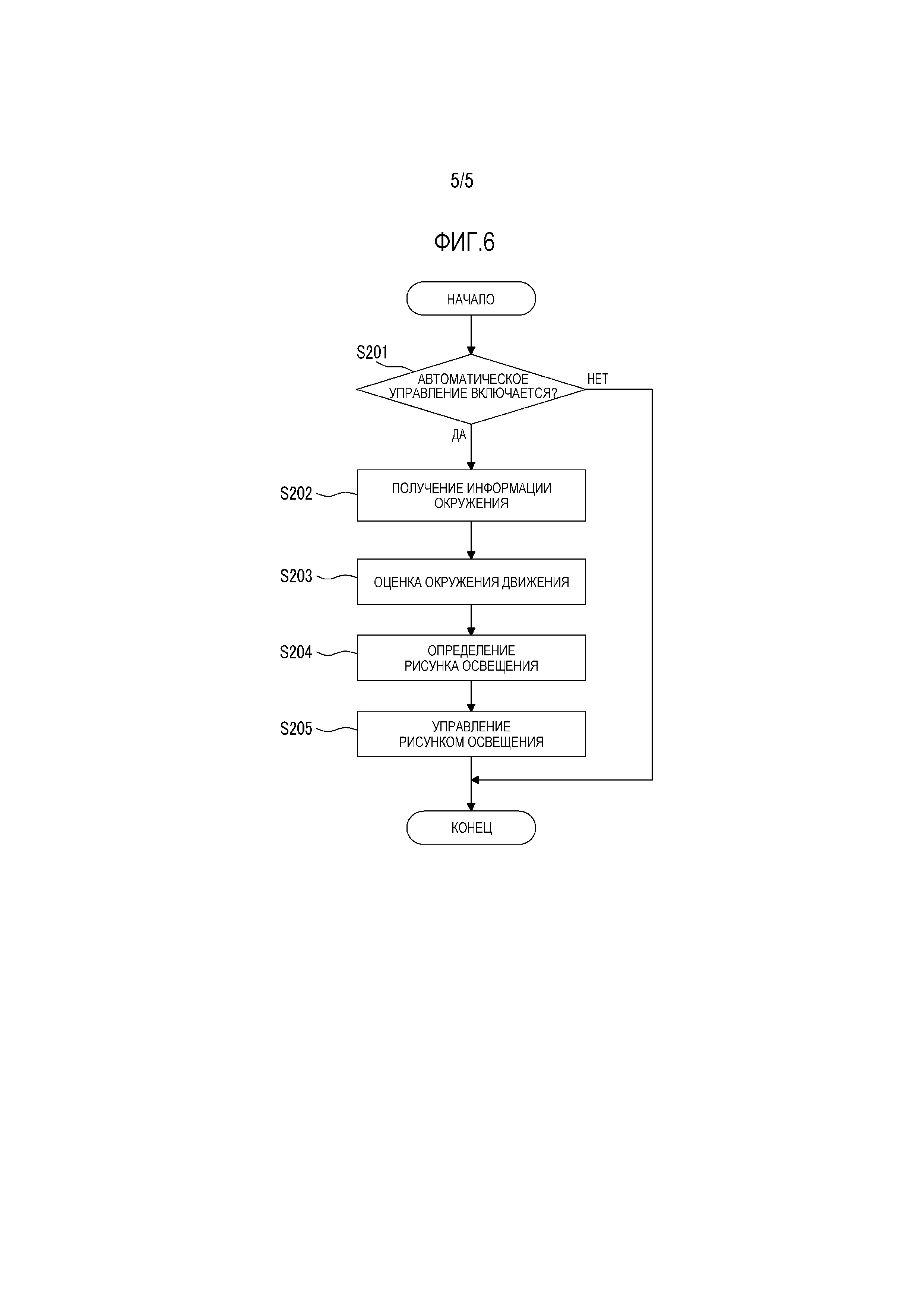
Ниже описывается операция автоматического управления передних фар 20 с использованием результата обучения операции обучения, описанной выше, со ссылкой на фиг. 6. Фиг. 6 является блок-схемой последовательности операций способа, показывающей последовательность операций операции во время автоматического управления рисунками освещения в системе управления передними фарами согласно варианту осуществления.
Как показано на фиг. 6, во время операции системы 10 управления передними фарами, когда операция обучения завершается, во-первых, выполняется определение в отношении того, включается или нет автоматическое управление передних фар 20 (этап S201). Таким образом, выполняется определение в отношении того, разрешается или нет операция автоматического управления передних фар 20. Включение и выключение автоматического управления задается посредством операции переключения и т.п. пассажира транспортного средства. В случае если автоматическое управление выключено (этап S201: "Нет"), последующая обработка опускается, и последовательность обработки завершается. В этом случае, обработка этапа S201 может выполняться снова после заданного периода.
В случае если автоматическое управление включено (этап S201: "Да"), информация окружения транспортного средства получается (этап S202). Информация окружения является информацией, используемой для того, чтобы оценивать окружение движения, и получается, например, из камеры 30 и различных других датчиков (например, датчика скорости транспортного средства, датчика ускорения, датчика яркости, радара, лидара и т.п.). После этого, текущее окружение движения оценивается на основе полученной информации окружения (этап S203). При оценке окружения движения, существующая технология может надлежащим образом использоваться, и в силу этого подробное описание опускается.
Затем, рисунок освещения, подходящий для оцененного окружения движения, определяется (этап S204). Таким образом, рисунок освещения, оптимальный для текущего окружения движения транспортного средства, определяется на основе результата обучения. В частности, выбирается рисунок освещения, имеющий наибольший коэффициент распознавания объекта в текущем окружении движения, из числа рисунков освещения, реализуемых посредством передних фар 20 транспортного средства. После этого, передние фары 20 управляются таким образом, что реализуется определенный рисунок освещения. Как результат, реализуется состояние, в котором пассажир транспортного средства легко визуально распознает обстановку впереди транспортного средства, или состояние, в котором коэффициент распознавания объекта камеры 30 и т.п. является высоким. Соответственно, например, пассажир может находить помеху впереди транспортного средства заблаговременно и может выполнять замедление и т.п. транспортного средства. Альтернативно, коэффициент распознавания объекта камеры 30 и т.п. повышается, за счет чего можно выполнять более точную помощь при вождении.
В силу вышеуказанного, в то время тогда последовательность обработки, связанная с операцией автоматического управления, завершается, обработка этапа S201 может выполняться после заданного периода от конца. В случае если обработка выполняется периодически, как описано выше, надлежащим образом реализуется рисунок освещения согласно текущему окружению движения. Даже во время операции автоматического управления, операция обучения может выполняться надлежащим образом. Тем не менее, рисунок освещения переключается на сравнительно высокой скорости во время операции обучения. По этой причине, хотя не ограничено конкретным образом, предпочтительно, если переключение выполняется с частотой или периодичностью, не мешающей движению транспортного средства.
Технические преимущества
Ниже описываются технические преимущества системы 10 управления передними фарами согласно варианту осуществления.
С помощью системы 10 управления передними фарами согласно варианту осуществления, как уже описано, можно надлежащим образом проводить обучение в отношении рисунка освещения передних фар 20 согласно окружению движения. В частности, в варианте осуществления, поскольку операция обучения может выполняться с использованием данных изображений, захваченных при переключении рисунка освещения передних фар 20 на высокой скорости, можно получать, за короткий период, большой объем обучающих данных, сбору которых требуется время в нормально режиме, и более эффективно совершенствовать обучение. В случае если обучающие данные накапливаются в то время, когда транспортное средство движется, можно получать обучающие данные согласно различным окружениям движения.
Поскольку передние фары 20, включающие в себя множество светодиодов, могут реализовывать чрезвычайно большое количество рисунков освещения посредством управления состоянием подсвечивания каждого светодиода, непросто находить оптимальный рисунок освещения согласно окружению движения из числа всех рисунков освещения. Тем не менее, согласно варианту осуществления, поскольку можно собирать обучающие данные, используемые при обучении на сравнительно высокой скорости, можно эффективно выполнять обучение. В варианте осуществления, в частности, операция обучения повторяется при сужении рисунков освещения, используемых при обучении, до рисунков освещения, имеющих высокий коэффициент распознавания, за счет чего можно более эффективно совершенствовать обучение. Соответственно, даже в случае, если передние фары 20 могут реализовывать большое количество рисунков освещения, можно надлежащим образом проводить обучение в отношении оптимального рисунка освещения.
В варианте осуществления, хотя передние фары, которые монтируются в транспортном средстве, описываются в качестве примера, изобретение также может применяться к передним фарам, которые монтируются в движущемся объекте, отличном от транспортного средства. Таким образом, в той мере, в какой движущийся объект перемещается при подсвечивании передней части с помощью света, может использоваться система 10 управления передними фарами согласно варианту осуществления, и могут получаться идентичные технические преимущества. Система 10 управления передними фарами согласно варианту осуществления может применяться к управлению светом, подсвечивающим боковую часть или заднюю часть движущегося объекта.
Дополнительные замечания
Ниже описываются различные аспекты изобретения, введенные из вышеописанного варианта осуществления.
Дополнительное примечание 1
Система управления передними фарами согласно дополнительному примечанию 1 представляет собой систему управления передними фарами, которая управляет передними фарами движущегося объекта. Движущийся объект включает в себя передние фары, включающие в себя множество светоизлучающих модулей и модуль формирования изображений, выполненный с возможностью захватывать изображения обстановки впереди. Система управления передними фарами включает в себя контроллер рисунков освещения, контроллер обработки изображений и модуль обучения. Контроллер рисунков освещения выполнен с возможностью осуществлять управление для изменения, по меньшей мере, одного из присутствия или отсутствия светового излучения и степени светового излучения каждого из светоизлучающих модулей передних фар, чтобы изменять рисунок освещения передних фар на один из множества рисунков освещения. Контроллер обработки изображений выполнен с возможностью осуществлять управление таким образом, что модуль формирования изображений захватывает изображения обстановки впереди для каждого из рисунков освещения, чтобы получать захваченное изображение. Модуль обучения выполнен с возможностью проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди, на основе захваченных изображений, захваченных для каждого из рисунков освещения.
С помощью системы управления передними фарами согласно дополнительному примечанию 1, по меньшей мере, одно из присутствия или отсутствия светового излучения и степени светового излучения (т.е. только присутствие или отсутствие светового излучения, только степень светового излучения или как присутствие или отсутствие светового излучения, так и степень светового излучения) каждого из светоизлучающих модулей, включенных в передние фары, изменяются в ходе работы, за счет чего передние фары управляются таким образом, что появляются множество рисунков освещения. В ходе управления рисунком освещения передних фар, изображения обстановки впереди захватываются для каждого из рисунков освещения. Таким образом, новое захваченное изображение получается каждый раз, когда рисунок освещения передних фар изменяется.
После этого, проводится обучение в отношении рисунка освещения передних фар, подходящего для обстановки впереди движущегося объекта, на основе захваченного изображения, полученного для каждого из рисунков освещения. Например, проводится обучение в отношении рисунка освещения, который обеспечивает возможность пассажиру движущегося объекта легко визуально распознавать обстановку впереди, либо рисунка освещения, который обеспечивает возможность получения более надлежащего результата распознавания в случае, если распознавание изображений выполняется с использованием захваченных изображений, захваченных посредством модуля формирования изображений. В случае если обучение, описанное выше, выполняется, и в случае, если передние фары могут реализовывать множество рисунков освещения, можно реализовывать соответствующий рисунок освещения согласно обстановке впереди (другими словами, окружениям движения).
Дополнительное примечание 2
В системе управления передними фарами согласно дополнительному примечанию 2, контроллер рисунков освещения выполнен с возможностью изменять рисунок освещения передних фар на один из множества рисунков освещения во время перемещения движущегося объекта. Контроллер обработки изображений выполнен с возможностью осуществлять управление таким образом, что модуль формирования изображений захватывает изображения обстановки впереди для каждого из рисунков освещения во время перемещения движущегося объекта, чтобы получать захваченные изображения.
С помощью системы управления передними фарами согласно дополнительному примечанию 2, формирование изображений (т.е. сбор обучающих данных) для каждого из рисунков освещения выполняется в то время, когда движущийся объект перемещается. По этой причине, можно накапливать захваченные изображения в состоянии, в котором обстановка впереди отличается (другими словами, обучающие данные в различных окружениях движения). Соответственно, можно надлежащим образом проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди.
Дополнительное примечание 3
В системе управления передними фарами согласно дополнительному примечанию 3, контроллер рисунков освещения выполнен с возможностью изменять рисунок освещения передних фар на один из множества рисунков освещения в заданный период, который является небольшим до такой степени, что считается, что обстановка впереди не изменяется, даже если движущийся объект перемещается. Модуль обучения выполнен с возможностью использовать захваченные изображения, захваченные в заданный период для обучения, в качестве захваченных изображений, захваченных в состоянии, в котором обстановка впереди является идентичной.
С помощью системы управления передними фарами согласно дополнительному примечанию 3, даже если движущийся объект перемещается в состоянии, в котором считается, что обстановка впереди является идентичной, можно получать результаты формирования изображений, соответствующие двум или более рисунков освещения. Таким образом, полученные захваченные изображения сравниваются друг с другом, за счет чего можно легко определять то, какой рисунок освещения является подходящим для обстановки впереди во время формирования изображений. Соответственно, можно надлежащим образом проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди.
Дополнительное примечание 4
В системе управления передними фарами согласно дополнительному примечанию 4, модуль обучения выполнен с возможностью вычислять коэффициент распознавания объекта впереди движущегося объекта в захваченных изображениях и осуществлять обучение в отношении рисунка освещения, имеющего более высокий коэффициент распознавания, чем рисунок освещения, который является более подходящим для обстановки впереди.
С помощью системы управления передними фарами согласно дополнительному примечанию 4, коэффициент распознавания объекта в захваченных изображениях используется, за счет чего можно надлежащим образом проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди.
Дополнительное примечание 5
В системе управления передними фарами согласно дополнительному примечанию 5, контроллер рисунков освещения выполнен с возможностью i) выбирать множество рисунков освещения, имеющих высокую вероятность приемлемости для обстановки впереди на основе предыдущих результатов обучения модуля обучения, и ii) изменять рисунок освещения передних фар на выбранные рисунки освещения во время последующего обучения.
С помощью системы управления передними фарами согласно дополнительному примечанию 5, обучение повторяется, за счет чего постепенно сужаются рисунки освещения, которые с большой вероятностью должны быть подходящими для обстановки впереди. По этой причине, даже в случае, если чрезвычайно большое число рисунков освещения является реализуемым посредством передних фар, можно эффективно проводить обучение в отношении рисунка освещения, подходящего для обстановки впереди.
Дополнительное примечание 6
В системе управления передними фарами согласно дополнительному примечанию 6, контроллер рисунков освещения и контроллер обработки изображений монтируются в движущемся объекте. Модуль обучения монтируется в устройстве за пределами движущегося объекта.
Дополнительное примечание 7
В системе управления передними фарами согласно дополнительному примечанию 7, обстановка впереди задается посредством, по меньшей мере, одного из временного отрезка, погоды, яркости и присутствия или отсутствия другого движущегося объекта и помехи.
Изобретение не ограничено вышеописанным вариантом осуществления и может изменяться при желании без отступления от сущности или объема изобретения, который может пониматься из формулы изобретения и всего подробного описания. Система управления передними фарами, которая заключает в себе такие изменения, также имеет намерение быть в пределах технического объема изобретения.
Реферат
Изобретение относится к области транспортного машиностроения. Система управления передними фарами движущегося объекта содержит контроллер рисунков освещения, контроллер обработки изображений и модуль обучения. Движущйся объект содержит передние фары, имеющие светоизлучающие модули и модуль формирования изображений, захватывающий изображения обстановки впереди движущегося объекта. Контроллер рисунков освещения управляет изменением светового излучения и степени светового излучения каждого из светоизлучающих модулей передних фар, чтобы изменять рисунок освещения передних фар. Контроллер обработки изображений управляет модулем формирования изображений, захватывающим изображения обстановки. Модуль обучения выполнен с возможностью обучения на основе захваченных изображений. Достигается возможность получения оптимального рисунка освещения передних фар. 6 з.п. ф-лы, 10 ил.
Комментарии