Устройство помощи для предотвращения столкновения - RU2737180C1
Код документа: RU2737180C1
Чертежи


Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Изобретение относится к устройству помощи для предотвращения столкновения, сконфигурированному для предотвращения столкновения между управляемым водителем транспортным средством и препятствием с использованием управления автоматическим торможением.
2. Раскрытие предшествующего уровня техники
[0002] Из уровня техники известно устройство помощи для предотвращения столкновения, сконфигурированное таким образом, чтобы при обнаружении передним датчиком, например, камерой или радаром, препятствия, вероятность столкновения с которым управляемого водителем транспортного средства высока, столкновение между управляемым водителем транспортным средством и препятствием предотвращалось путем управления автоматическим торможением. Управление автоматическим торможением представляет собой управление замедлением управляемого водителем транспортного средства с заранее заданным замедлением путем создания в управляемом водителем транспортном средстве тормозного усилия без вмешательства водителя.
[0003] Во время управления автоматическим торможением водитель может нажать на педаль акселератора. Например, в публикации нерассмотренной японской патентной заявки № 2017-114430 (JP 2017-114430 A) раскрыто устройство, сконфигурированное для выполнения управления автоматическим торможением в тех случаях, когда предполагается столкновение управляемого водителем транспортного средства с препятствием, и прекращения управления автоматическим торможением (то есть блокирования управления автоматическим торможением) с отдачей приоритета нажатию педали акселератора водителем, когда степень нажатия педали акселератора водителем превышает заранее заданное значение. Таким образом, управляемое водителем транспортное средство может быть ускорено с интенсивностью, определяемой нажатием педали акселератора. Операция прекращения управления автоматическим торможением, позволяющая ускорить управляемое водителем транспортное средство с интенсивностью, определяемой нажатием педали акселератора, в дальнейшем будет называться «приоритетом педали акселератора».
[0004] При обнаружении изменения положения переключения передач во время нажатия педали акселератора водителем устройство не прекращает управление автоматическим торможением, полагая нажатие педали акселератора ошибкой водителя. В этом случае приоритет не может быть отдан нажатию педали акселератора.
[0005] В публикации нерассмотренной японской патентной заявки № 2012-121534 (JP 2012-121534 A) раскрыто устройство, сконфигурированное для определения соответствия действий водителя целям предотвращения столкновения, блокировки управления автоматическим торможением в случае, если действия водителя будут признаны соответствующими целям предотвращения столкновения, и осуществления управления автоматическим торможением в случае, если действия водителя будут признаны ошибочными. Это устройство выполняет управление автоматическим торможением, обнаружив ошибочное нажатие педали акселератора водителем, когда прогнозируется столкновение транспортного средства водителя с препятствием, если степень нажатия педали акселератора превышает заранее заданное значение или скорость нажатия педали акселератора превышает заранее заданное значение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Любое из описанных выше устройств не прекращает управление автоматическим торможением (то есть выполняет управление автоматическим торможением), если предполагается, что нажатие педали акселератора водителем произошло случайно (операция ошибочного нажатия на педаль акселератора, хотя водитель пытается нажать на педаль тормоза). Ошибочное нажатие водителем на педаль акселератора вместо педали тормоза можно в дальнейшем называть ошибочным нажатием.
[0007] Тем не менее, трудно точно определить, осознанно ли водитель нажал на педаль акселератора, или эту операцию следует считать ошибочным нажатием.
[0008] Например, устройство, предложенное заявкой JP 2017-114430 A, определяет, что нажатие педали акселератора вместе с переключением передач является ошибочным нажатием. Тем не менее, водитель может по ошибке сильно нажать на педаль акселератора, не переключая передачу. Например, когда транспортное средство водителя приближается к пешеходу, водитель, как правило, не нажимает с силой на педаль акселератора. Например, если управляемое водителем транспортное средство догоняет пешехода, водитель может ошибочно сильно нажать на педаль акселератора вместо педали тормоза. В этом случае нажатие на педаль акселератора не будет определено как ошибочное нажатие, так как переключение передач при этом не выполняется. Поэтому управление автоматическим торможением не выполняется даже в ситуации, требующей управления автоматическим торможением для предотвращения столкновения.
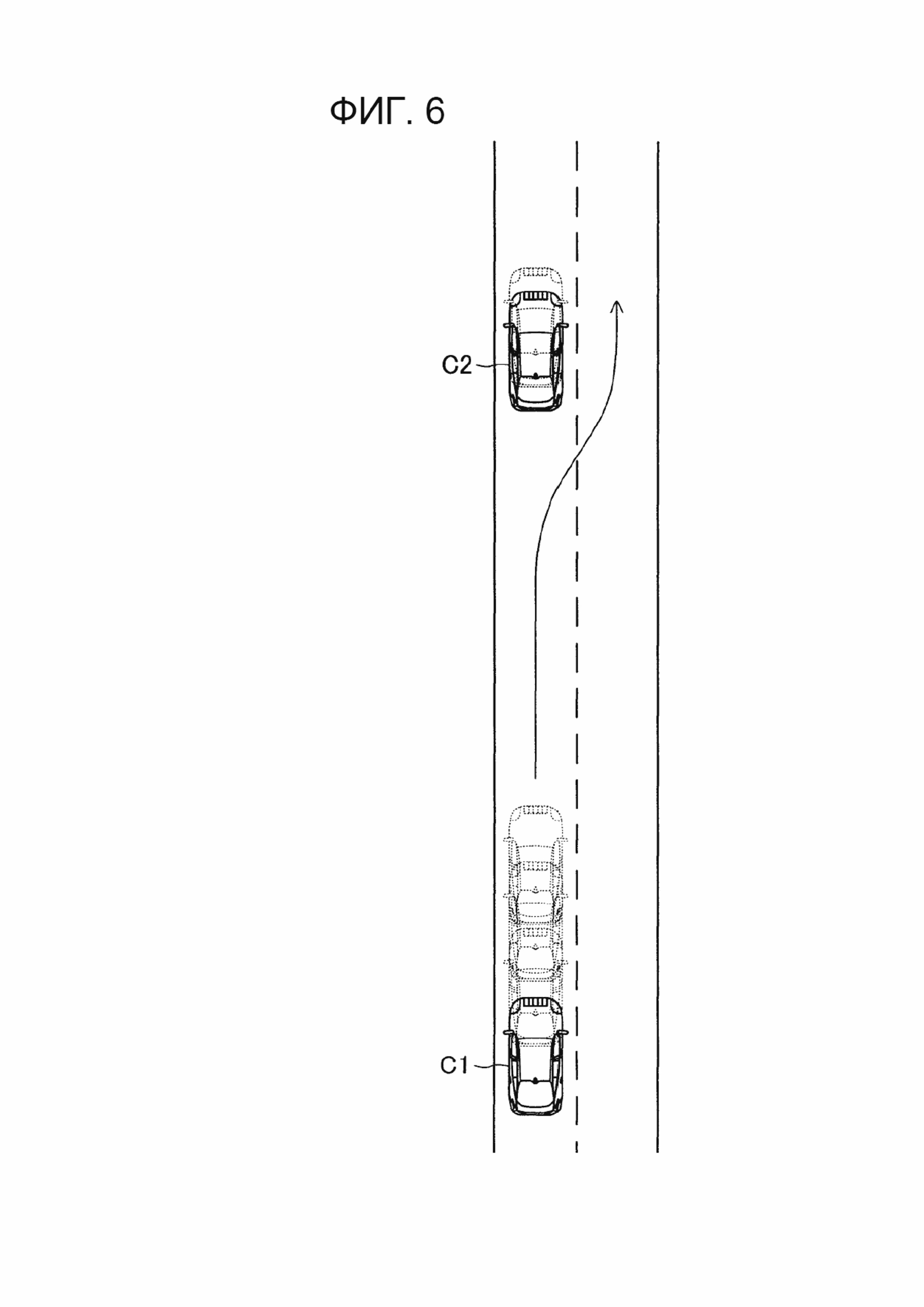
[0009] Например, устройство, предложенное заявкой JP 2012-121534 A, определяет, что педаль акселератора нажата ошибочно, если степень нажатия педали акселератора превышает заранее заданное значение или скорость нажатия педали акселератора превышает заранее заданное значение. Тем не менее, если водитель намеренно сильно или быстро нажимает на педаль акселератора, такое нажатие педали акселератора определяется как ошибочное. Поэтому управление автоматическим торможением выполняется. Например, когда водитель ускоряет свое транспортное средство С1, чтобы обогнать транспортное средство С2, движущееся впереди транспортного средства С1, как показано на ФИГ. 6, устройство расценивает движущееся впереди транспортное средство С2 как препятствие, поскольку управляемое водителем транспортное средство С1 быстро приближается к движущемуся впереди транспортному средству С2 в процессе обгона движущегося впереди транспортного средства С2. Следовательно, может выполняться управление автоматическим торможением. В начале управления автоматическим торможением нельзя осуществить приоритетное нажатие педали акселератора, следовательно, управляемое водителем транспортное средство не может двигаться по нужной водителю траектории. Кроме того, движущееся сзади транспортное средство может чрезмерно приблизиться к управляемому водителем транспортному средству вследствие управления автоматическим торможением.
[0010] Изобретением предложен способ управления автоматическим торможением в соответствующей ситуации.
[0011] Устройство помощи для предотвращения столкновения согласно одному из аспектов изобретения содержит тормозное устройство, средство обнаружения препятствия, средство управления автоматическим торможением и средство блокировки автоматического торможения. Тормозное устройство сконфигурировано для создания тормозного усилия в управляемом водителем транспортном средстве в ответ на выполняемое водителем торможение. Средство обнаружения препятствия сконфигурировано для обнаружения препятствия вокруг транспортного средства водителя. Средство управления автоматическим торможением сконфигурировано для выполнения управления автоматическим торможением для предотвращения столкновения между транспортным средством водителя и препятствием путем развития тормозного усилия посредством тормозного устройства без вмешательства водителя, если установлено, что транспортное средство водителя с высокой вероятностью может столкнуться с препятствием. Средство блокировки автоматического торможения сконфигурировано для блокировки управления автоматическим торможением, если установлено, что значение показателя нажатия педали акселератора равно порогу нажатия педали или превышает его. Значение показателя нажатия педали акселератора коррелирует с нажатием педали акселератора водителем. Кроме того, устройство помощи для предотвращения столкновения содержит средство определения особого типа и ограничительное средство. Средство определения особого типа сконфигурировано для определения, является ли тип препятствия предварительно заданным особому типу препятствия. Ограничительное средство сконфигурировано для ограничения действия средства блокировки автоматического торможения, если установлено, что препятствие является предварительно заданным особым типом препятствия, чтобы средство блокировки автоматического торможения не блокировало управление автоматическим торможением.
[0012] Устройство помощи для предотвращения столкновения содержит тормозное устройство, средство обнаружения препятствия, средство управления автоматическим торможением и средство блокировки автоматического торможения. Тормозное устройство развивает тормозное усилие (например, момент торможения для остановки вращения колес) в управляемом водителем транспортном средстве в качестве реакции на нажатие водителем педали тормоза. Например, тормозное устройство может развивать тормозное усилие в ответ на нажатие водителем педали тормоза за счет давления в гидравлической тормозной системе.
[0013] Средство обнаружения препятствия обнаруживает препятствие вокруг управляемого водителем транспортного средства.
[0014] Средство управления автоматическим торможением выполняет управления автоматическим торможением для предотвращения столкновения между управляемым водителем транспортным средством и препятствием путем развития тормозного усилия с использованием тормозного устройства без вмешательства водителя, если установлено, что управляемое водителем транспортное средство с высокой вероятностью может столкнуться с препятствием.
[0015] Средство блокировки автоматического торможения блокирует управление автоматическим торможением, если установлено, что значение показателя нажатия педали акселератора, коррелирующее с нажатием педали акселератора водителем, равно порогу нажатия педали или превышает его. Например, значение показателя нажатия педали акселератора может представлять собой, по меньшей мере, степень нажатия педали акселератора или скорость нажатия педали акселератора. Управление автоматическим торможением прекращается, когда средство блокировки автоматического управления торможением блокирует управление автоматическим торможением во время осуществления управления автоматическим торможением. Запуск управления автоматическим торможением блокируется в ситуации, в которой управление автоматическим торможением не осуществляется.
[0016] Например, когда водитель намеревается выполнить сильное нажатие на педаль акселератора, чтобы объехать препятствие, управление автоматическим торможением не выполняется, и водитель может избежать столкновения, так как ускорение его транспортного средства будет считаться намеренным путем передачи приоритета нажатию педали акселератора.
[0017] Нажатие педали акселератора не всегда выполняется водителем осознанно. Например, когда транспортное средство водителя приближается к пешеходу, велосипедисту или другим уязвимым участникам дорожного движения, водитель, как правило, не совершает сильное нажатие педали акселератора. Если в такой ситуации будет распознано сильное нажатие педали акселератора, передача приоритета акселератору может быть запрещена исходя из предположения, что водитель совершает ошибочное нажатие.
[0018] Изобретением предложено средство определения особого типа и ограничительное средство. Средство определения особого типа определяет, относится ли препятствие к предварительно заданному особому типу препятствия. Если установлено, что препятствие относится к особому типу препятствия, ограничительное средство ограничивает действие средства блокировки автоматического торможения (не приводит в действие средство блокировки автоматического торможения), так что средство блокировки автоматического торможения не запрещает управление автоматическим торможением. Таким образом, средство блокировки автоматического торможением не блокирует выполнение управления автоматическим торможением.
[0019] Согласно изобретению, необходимость в блокировке управления автоматическим торможением определяют в зависимости от типа препятствия. Таким образом, управление автоматическим торможением может быть применено в соответствующей ситуации.
[0020] Средство управления автоматическим торможением может быть сконфигурировано для распознавания, по меньшей мере, пешехода, велосипеда и автомобиля в качестве целевого препятствия для применения управления автоматическим торможением. Средство определения особого типа может быть сконфигурировано для определения, что, по меньшей мере, пешеход и велосипед являются препятствиями особого типа, и что, по меньшей мере, автомобиль не является препятствием особого типа.
[0021] Согласно этой конфигурации средство управления автоматическим торможением распознает, по меньшей мере, пешехода, велосипед и автомобиль в качестве целевого препятствия для применения управления автоматическим торможением.
[0022] Когда управляемое водителем транспортное средство приближается к пешеходу или велосипеду, водитель, как правило, не совершает сильное нажатие педали акселератора. Когда управляемое водителем транспортное средство приближается к другому транспортному средству, водитель может намеренно выполнить сильное нажатие педали акселератора. Например, водитель может ускорить свое транспортное средство таким образом, чтобы обогнать транспортное средство, движущееся впереди транспортного средства водителя. В этом случае движущееся впереди транспортное средство может быть распознано как препятствие, поскольку транспортное средство водителя быстро приближается к движущемуся впереди транспортному средству в процессе обгона движущегося впереди транспортного средства. Это может привести к запуску управления автоматическим торможением. В этом случае движущееся сзади транспортное средство может чрезмерно приблизиться к транспортному средству водителя вследствие управления автоматическим торможением.
[0023] Средство определения особого типа определяет, что, по меньшей мере, пешеход и велосипед относятся к препятствиям особого типа, и что, по меньшей мере, автомобиль не относится к препятствиям особого типа. В этом случае под «велосипедом» может пониматься велосипед, на котором едет человек, а велосипед, оставленный на дороге (велосипед, на котором никто не едет), не должен считаться препятствием в смысле цели предотвращения столкновения.
[0024] Если препятствием является пешеход или велосипед, автоматическое управление торможением не блокируется. Это означает, что управление автоматическим торможением разрешено. Таким образом, если транспортное средство водителя с высокой вероятностью может столкнуться с пешеходом или велосипедом, но водитель ошибочно сильно нажимает на педаль акселератора, нажатие педали акселератора игнорируется, и выполняется управление автоматическим торможением. Это в достаточной мере способствует предотвращению столкновения.
[0025] Если препятствием является автомобиль, средство определения особого типа обнаруживает, что препятствие не является препятствием особого типа. Поэтому управление автоматическим торможением блокируется, если значение показателя нажатия педали акселератора равно порогу нажатия педали или превышает его. Таким образом, приоритет может быть отдан педали акселератора, и водитель своими действиями может избежать столкновения.
[0026] Нажатие педали акселератора представляет собой нажатие на педаль акселератора водителем транспортного средства. Устройство помощи для предотвращения столкновения может содержать средство определения второго нажатия и средство прекращения управления при втором нажатии. Средство определения второго нажатия сконфигурировано для определения второго нажатия педали акселератора во время управления автоматическим торможением. Средство прекращения управления при втором нажатии сконфигурировано для того, чтобы средство управления автоматическим торможением прекращало управление автоматическим торможением, когда средство определения второго нажатия обнаружит, что второе нажатие педали акселератора произошло во время управления автоматическим торможением.
[0027] Когда водитель второй раз нажимает на педаль акселератора (снимает ногу с нажатой педали акселератора и повторно нажимает на нее) во время управления автоматическим торможением, это действие можно считать действием, предпринятым водителем для ускорения транспортного средства. В этом случае приоритет может быть отдан нажатию педали акселератора.
[0028] Средство определения второго нажатия может определять второе нажатие педали акселератора во время управления автоматическим торможением. Средство прекращения управления при втором нажатии может подавать на средство управления автоматическим торможением команду на прекращение автоматического управления торможением, когда средство определения второго нажатия обнаружит, что второе нажатие педали акселератора произошло во время управления автоматическим торможением.
[0029] Согласно этой конфигурации управление автоматическим торможением может быть заблокировано в ситуации, когда водитель пытается ускорить свое транспортное средство.
[0030] Под нажатием педали акселератора может пониматься нажатие на педаль акселератора водителем транспортного средства. Средство блокировки автоматического торможения может быть сконфигурировано для получения степени нажатия педали и скорости нажатия педали акселератора водителем в качестве значения показателя нажатия педали акселератора, а также для определения того, что значение показателя нажатия педали акселератора равно порогу нажатия педали или превышает его, если удовлетворяется хотя бы одно из следующих условий. Первое условие заключается в том, что степень нажатия педали акселератора равна первому порогу степени нажатия педали или превышает его. Второе условие заключается в том, что степень нажатия педали акселератора равна второму порогу степени нажатия педали или превышает, а скорость нажатия педали акселератора равна или превышает порог скорости нажатия педали, при этом второй порог степени нажатия педали меньше первого порога степени нажатия педали.
[0031] Согласно этой конфигурации можно соответствующим образом настроить условие нажатия педали акселератора для блокировки управления автоматическим торможением. Это позволяет уменьшить вероятность того, что управление автоматическим торможением будет осуществляться во время намеренного нажатия педали акселератора водителем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0032] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
На ФИГ. 1 изображена схематическая конфигурация устройства помощи для предотвращения столкновения согласно одному из примеров осуществления изобретения;
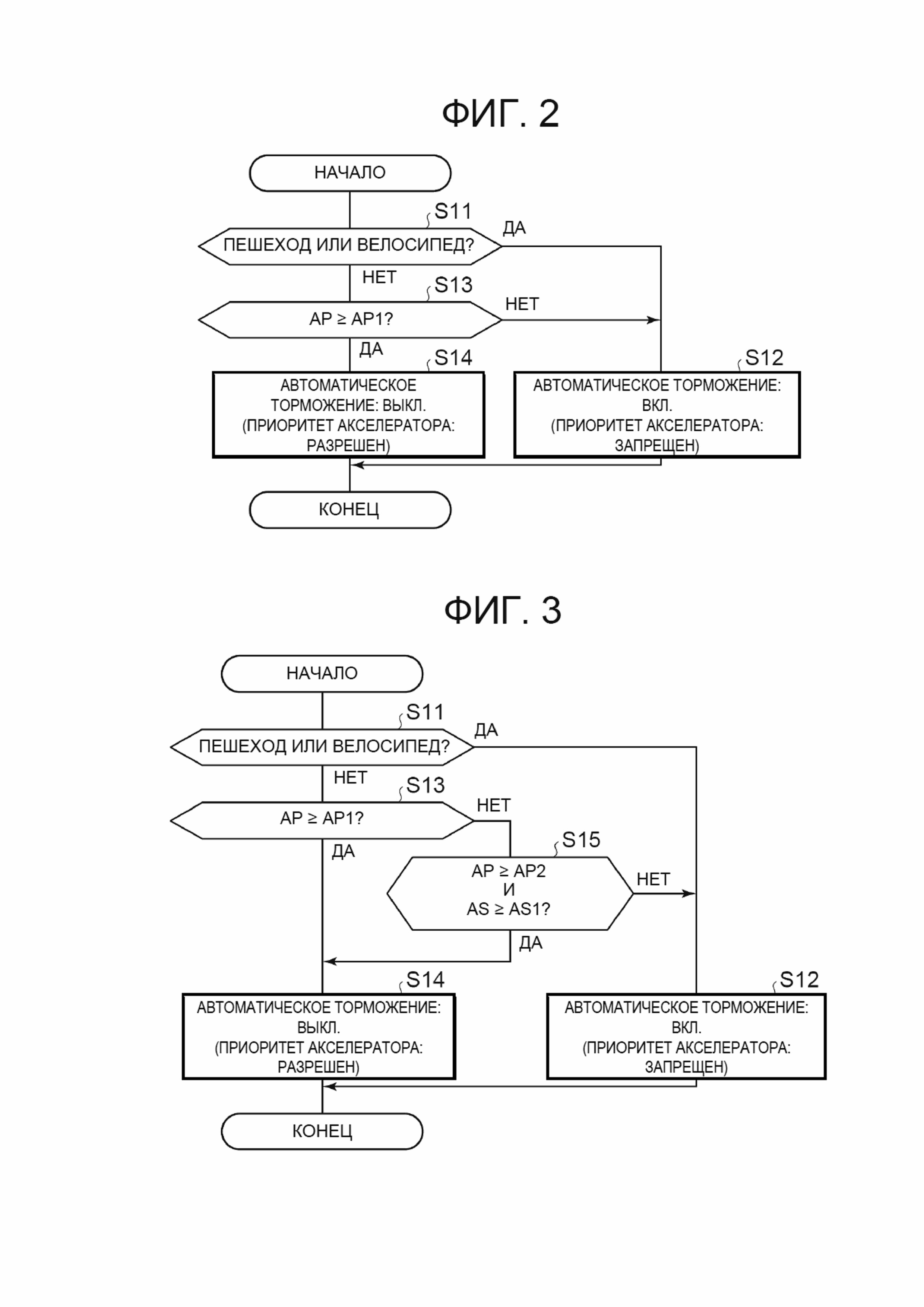
На ФИГ. 2 изображена блок-схема, иллюстрирующая алгоритм управления переключением между разрешением/блокировкой автоматического торможения;
На ФИГ. 3 изображен Модифицированный пример 1 алгоритма управления переключением между разрешением/блокировкой автоматического торможения;
На ФИГ. 4 изображен Модифицированный пример 2 алгоритма управления переключением между разрешением/блокировкой автоматического торможения;
На ФИГ. 5 изображен Модифицированный пример 3 алгоритма управления переключением между разрешением/блокировкой автоматического торможения; и
На ФИГ. 6 в плане изображена ситуация, в которой транспортное средство водителя приближается к движущемуся впереди транспортному средству и обгоняет его.
ПОДРОБНОЕ РАСКРЫТИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0033] Устройство помощи для предотвращения столкновения в соответствии с одним из примеров осуществления настоящего изобретения подробно раскрыто ниже со ссылкой на чертежи.
[0034] Устройство помощи для предотвращения столкновения согласно одному из примеров осуществления используется в транспортном средстве (далее именуемом «транспортным средством водителя» для отличия от других транспортных средств) и содержит электронный блок 10 управления (ЭБУ) помощи при вождении, ЭБУ 20 тормоза, ЭБУ 30 двигателя и ЭБУ 40 измерений, как показано на ФИГ. 1.
[0035] Эти ЭБУ представляют собой электронные блоки управления, каждый из которых в качестве основной части содержит микрокомпьютер, и которые соединены друг с другом шиной CAN, не показанной на фигурах, что позволяет им обмениваться информацией. В данной конфигурации микрокомпьютер содержит центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), энергонезависимую память и интерфейс (I/F). ЦП реализует различные функции посредством выполнения инструкций (программ или процедур), хранящихся в ПЗУ. ЭБУ могут быть частично или полностью интегрированы в единый ЭБУ.
[0036] ЭБУ 10 помощи при вождении представляет собой центральный контроллер, помогающий водителю при вождении и выполняющий функцию помощи в предотвращении столкновения. Функция помощи в предотвращении столкновения предназначена для привлечения внимания водителя в случае обнаружения препятствия перед транспортным средством водителя и предотвращения столкновения транспортного средства водителя с препятствием путем управления автоматическим торможением, когда вероятность столкновения возрастает. Так как функцию помощи в предотвращении столкновения обычно называют системой предаварийной безопасности (СПБ), в дальнейшем она будет называться «функцией СПБ».
[0037] ЭБУ 10 помощи при вождении подключено к датчику 50 передней камеры, переднему радиолокационному датчику 60, датчику 70 состояния транспортного средства, датчику 80 рабочего состояния и звуковому сигнализатору 90.
[0038] Датчик 50 передней камеры расположен в верхней части лобового стекла в салоне транспортного средства и выполняет съемку зоны перед транспортным средством водителя. Датчик 50 передней камеры распознает разметку полос движения на дороге и трехмерный объект перед транспортным средством водителя на основании полученных изображений зоны и передает информацию об этих линиях и объекте (информацию о разметке полос движения и трехмерном объекте) в ЭБУ 10 помощи при вождении в каждый заранее заданный период. Например, информация о разметке полос движения описывает форму разметки полос движения и расположение транспортного средства водителя относительно разметки полос движения. Например, информация о трехмерном объекте указывает на тип трехмерного объекта, обнаруженного перед транспортным средством водителя, размер трехмерного объекта, взаимное расположение трехмерного объекта и транспортного средства водителя. Например, распознавание типа трехмерного объекта реализуется средствами машинного обучения, например, сопоставлением образов.
[0039] Передний радиолокационный датчик 60 установлен в центре передней части кузова транспортного средства и распознает трехмерные объекты в зоне перед транспортным средством водителя. Передний радиолокационный датчик 60 излучает радиоволны в миллиметровом диапазоне (в дальнейшем «миллиметровые волны») и принимает миллиметровые волны, отраженные трехмерным объектом (например, другим транспортным средством, пешеходом, велосипедом или зданием), находящимся в пределах диапазона излучения (то есть отраженные волны). Передний радиолокационный датчик 60 рассчитывает расстояние между транспортным средством водителя и трехмерным объектом, относительную скорость между транспортным средством водителя и трехмерным объектом и положение (направление) трехмерного объекта относительно транспортного средства водителя на основании разности фаз между излучаемыми миллиметровыми волнами и принимаемыми отраженными волнами, уровня затухания отраженных волн и времени между излучением миллиметровых волн и приемом отраженных волн. Передний радиолокационный датчик 60 передает информацию о результатах вычислений (информацию о трехмерных объектах) в ЭБУ 10 помощи при вождении в каждый заранее заданный период.
[0040] ЭБУ 10 помощи при вождении объединяет информацию о трехмерных объектах, поступающую с датчика 50 передней камеры и переднего радиолокационного датчика 60, для получения высокоточной информации о трехмерных объектах.
[0041] В дальнейшем датчик 50 передней камеры и передний радиолокационный датчик 60 совместно будут называться «передним датчиком», а информация о зоне перед транспортным средством водителя, полученная от датчика 50 передней камеры и переднего радиолокационного датчика 60 – информацией от переднего датчика.
[0042] Датчик 70 состояния транспортного средства может представлять собой датчик скорости транспортного средства, сконфигурированный для распознавания скорости транспортного средства, датчик продольного ускорения, сконфигурированный для определения ускорения в продольном направлении транспортного средства, датчик поперечного ускорения, сконфигурированный для определения ускорения в поперечном направлении транспортного средства, и датчик скорости рыскания, сконфигурированный для определения скорости рыскания транспортного средства.
[0043] Датчик 80 рабочего состояния представляет собой датчик или переключатель, сконфигурированный для распознавания действий водителя. Примеры датчика 80 рабочего состояния включают датчик степени нажатия педали акселератора, сконфигурированный для определения степени нажания педали акселератора, датчик степени нажатия педали тормоза, сконфигурированный для определения степени нажатия педали тормоза, датчик положения педали тормоза, сконфигурированный для определения того, нажата ли педаль тормоза, датчик угла поворота рулевого колеса, сконфигурированный для определения угла поворота рулевого колеса, датчик крутящего момента рулевого управления, сконфигурированный для определения крутящего момента рулевого управления, и датчик переключения передач, сконфигурированный для определения положения рычага переключения передач.
[0044] Информация, полученная датчиком 70 состояния транспортного средства и датчиком 80 рабочего состояния (в дальнейшем – информация датчика), передается по шине CAN (не показанной на фигурах) в ЭБУ 10 помощи при вождении в каждый заранее заданный период.
[0045] Звуковой сигнализатор 90 подает звуковой сигнал в ответ на команду от ЭБУ 10 помощи при вождении. Для привлечения внимания водителя ЭБУ 10 помощи при вождении передает на звуковой сигнализатор 90 команду на подачу звукового сигнала звуковым сигнализатором 90. Это позволяет привлечь внимание водителя.
[0046] ЭБУ 20 тормоза соединен с тормозным приводом 21. Тормозной привод 21 расположен в гидравлическом контуре между главным цилиндром (не показанном на фигурах) и фрикционным тормозным механизмом 22. Главный цилиндр нагнетает гидравлическую жидкость в соответствии с усилием нажатия педали тормоза. Фрикционный тормозной механизм 22 установлен на каждом правом и левом колесе передней и задней оси. Фрикционный тормозной механизм 22 содержит тормозной диск 22a, прикрепленный к колесу, и тормозной суппорт 22b, прикрепленный к кузову транспортного средства. Тормозной привод 21 регулирует гидравлическое давление на колесном цилиндре в тормозном суппорте 22b в ответ на команду от ЭБУ 20 тормоза и приводит в действие колесный цилиндр гидравлическим давлением, прижимая тормозные колодки к тормозному диску 22a и создавая тем самым силу трения при торможении. ЭБУ 20 тормоза устанавливает запрошенное водителем замедление на основе степени нажатия педали тормоза, регистрируемой датчиком степени нажатия тормоза, и управляет работой тормозного привода 21 таким образом, чтобы транспортное средство водителя замедлялось в соответствии с запрошенным водителем замедлением. При получении команды на торможение СПБ от ЭБУ 10 помощи при вождении ЭБУ 20 тормоза управляет активацией тормозного привода 21 таким образом, чтобы транспортное средство водителя замедлялось с запрошенным замедлением СПБ, содержащимся в команде на торможение СПБ.
[0047] При получении команды на торможение СПБ и нажатии на педаль тормоза ЭБУ 20 тормоза в качестве окончательного запрошенного замедления использует запрошенное водителем замедление или запрошенное СПБ замедление, в зависимости от того, которое из абсолютных значений больше. ЭБУ 20 тормоза управляет активацией тормозного привода 21 таким образом, чтобы транспортное средство водителя замедлялось с окончательным запрошенным замедлением. То есть ЭБУ 20 тормоза выполняет коррекцию работы тормоза.
[0048] ЭБУ 30 двигателя соединен с приводом 31 двигателя. Привод 31 двигателя изменяет рабочее состояние двигателя 32 (двигателя внутреннего сгорания). Приводом 31 двигателя может быть привод дроссельной заслонки, сконфигурированный для изменения степени открытия дроссельной заслонки. ЭБУ 30 двигателя устанавливает запрошенный водителем крутящий момент на основании степени нажатия педали акселератора, распознанной датчиком степени нажатия педали акселератора, и скорости транспортного средства, распознанной датчиком скорости транспортного средства, и активизирует привод 31 двигателя таким образом, чтобы двигатель 32 выдавал запрошенный водителем крутящий момент. При получении команды на ограничение тяги от ЭБУ 10 помощи при вождении ЭБУ 30 двигателя управляет срабатыванием привода 31 двигателя таким образом, чтобы ограничить крутящий момент двигателя 32 на выходе. Если транспортное средство является электромобилем, привод 31 двигателя соответствует водителю для электродвигателя. Если транспортное средство является гибридным транспортным средством, привод 31 двигателя соответствует приводу двигателя внутреннего сгорания и водителю для электродвигателя.
[0049] ЭБУ 40 измерений соединен с индикатором 41 и лампой 42 стоп-сигнала. ЭБУ 40 измерений может подавать на индикатор 41 команду на вывод индикации, относящейся к системе помощи при вождении, в ответ на команду от ЭБУ 10 помощи при вождении. ЭБУ 40 измерений может включать лампу 42 стоп-сигнала в соответствии с командой, поступающей от ЭБУ 10 помощи при вождении или от ЭБУ 20 тормоза.
Система управления СПБ
[0050]
Ниже будет описана система управления СПБ. С точки зрения функций ЭБУ 10 помощи при вождении содержит блок 11 распознавания столкновения, блок 12 уведомления, блок 13 управления автоматическим торможением, блок 14 блокировки, блок 15 ограничения блокировки и блок 16 определения особого типа.
[0051] Блок 11 распознавания столкновения определяет вероятность столкновения транспортного средства водителя с расположенным перед транспортным средством водителя трехмерным объектом на основании информации, поступающей от переднего датчика, и состояния транспортного средства, обнаруженного датчиком 70 состояния транспортного средства. Например, блок 11 распознавания столкновения определяет высокую вероятность столкновения транспортного средства водителя с трехмерным объектом в том случае, если трехмерный объект сохраняет свое текущее состояние движения (неподвижное состояние в том случае, если трехмерный объект является неподвижным), а транспортное средство водителя сохраняет свое текущее состояние движения. Когда блок 11 распознавания столкновения обнаруживает высокую вероятность столкновения транспортного средства водителя с трехмерным объектом, блок 11 распознавания столкновения идентифицирует трехмерный объект как препятствие по результатам определения.
[0052] Только если типом трехмерного объекта является пешеход, велосипед или автомобиль, блок 11 распознавания столкновения устанавливает трехмерный объект в качестве цели для предотвращения столкновения (цели для управления автоматическим торможением). «Велосипедом» считают велосипед, на котором едет человек, и не считают велосипед, оставленный на дороге (велосипед, на котором никто не едет). Таким образом, датчик 50 камеры переднего вида должен распознавать, по меньшей мере, пешехода, велосипед и автомобиль среди трехмерных объектов, находящихся перед транспортным средством водителя, то есть эти типы должны поддаваться идентификации.
[0053] Блок 11 распознавания столкновения определяет, высока ли вероятность столкновения транспортного средства водителя с тремя типами объектов (пешеход, велосипед и автомобиль), и распознает эти объекты в качестве препятствий, если вероятность столкновения высока. Блок 11 распознавания столкновения не считает целью предотвращения столкновения трехмерные объекты, отличающиеся от названных трех типов объектов, и поэтому не распознает эти трехмерные объекты как препятствия. Пешеход, велосипед и автомобиль в дальнейшем называются «целями для предотвращения столкновения».
[0054] В частности, при обнаружении препятствия блок 11 распознавания столкновения рассчитывает прогнозируемое время TTC до столкновения, по истечении которого транспортное средство водителя может столкнуться с препятствием. Прогнозируемое время TTC до столкновения рассчитывается по формуле (1) на основании расстояния «d» между препятствием, транспортным средством водителя и скорости Vr транспортного средства водителя относительно препятствия.
TTC = d/Vr (1)
[0055] Прогнозируемое время TTC до столкновения используют в качестве показателя, указывающего на степень вероятности столкновения транспортного средства водителя с препятствием. По мере уменьшения прогнозируемого времени TTC до столкновения увеличивается вероятность (риск) столкновения транспортного средства водителя с препятствием.
[0056] В системе управления СПБ согласно данному примеру осуществления изобретения степень вероятности столкновения транспортного средства водителя с препятствием делится на два этапа на основании прогнозируемого времени TTC до столкновения. На раннем, то есть первом этапе блок 12 уведомления предупреждает водителя посредством звукового сигнализатора 90 и индикатора 41. На втором этапе, на котором вероятность столкновения транспортного средства водителя с препятствием выше, чем на первом этапе, блок 13 управления автоматическим торможением осуществляет управление автоматическим торможением, содействуя предотвращению столкновения.
[0057] Блок 11 распознавания столкновения определяет, что вероятность столкновения транспортного средства водителя с препятствием соответствует первому этапу, если прогнозируемое время TTC до столкновения уменьшается до порога TTCw предупреждения или меньшего значения. Блок 11 распознавания столкновения определяет, что вероятность столкновения транспортного средства водителя с препятствием соответствует второму этапу, если прогнозируемое время TTC до столкновения дополнительно уменьшается до порога TTCa активации (< TTCw) или меньшего значения. Если установлено, что вероятность столкновения транспортного средства водителя с любым обнаруженным трехмерным объектом соответствует первому этапу, блок 12 уведомления приводит в действие звуковой сигнализатор 90 и индикатор 41 независимо от того, является ли трехмерный объект целью для предотвращения столкновения.
[0058] Если установлено, что вероятность столкновения транспортного средства водителя с препятствием (целью предотвращения столкновения) соответствует второму этапу, блок 13 управления автоматическим торможением передает команду на торможение СПБ на ЭБУ 20 тормоза. Команда торможения СПБ содержит информацию, указывающую на запрошенное СПБ замедление Gспб.
[0059] Запрошенное СПБ замедление Gспб можно рассчитать следующим образом. Например, если препятствие неподвижно, то расстояние X перемещения, необходимое для остановки транспортного средства водителя, может быть выражено уравнением (2), в котором текущая скорость транспортного средства водителя (= относительная скорость) выражена «V», замедление транспортного средства водителя – «a» (< 0), а время, необходимое для остановки транспортного средства – «t».
X = V ⋅ t + (1/2) ⋅ a ⋅ t2 (2)
Время «t», необходимое для остановки транспортного средства, может быть выражено уравнением (3).
t = -V/a (3)
Таким образом, расстояние Х перемещения, необходимое для остановки транспортного средства водителя, может быть выражено уравнением (4), в котором время «t», вычисленное по уравнению (3), заменено на время «t», вычисленное по уравнению (2).
X = -V2/2a (4)
Для остановки транспортного средства на расстоянии β от препятствия целесообразно, чтобы замедление «a» рассчитывалось путем приравнивания расстояния «X» перемещения расстоянию (d - β), полученному вычитанием расстояния β (> 0) из расстояния «d», определенного передним датчиком. Если препятствие движется, то расстояние X перемещения следует рассчитать, используя скорость и замедление относительно препятствия.
[0060] Рассчитанное замедление «a» используется в качестве запрошенного СПБ замедления Gспб. Верхнее предельное значение Gмакс (> 0) назначается равным запрошенному СПБ замедлению Gспб, а значение (абсолютное значение) запрошенного СПБ замедления Gспб назначается равным верхнему предельному значению Gмакс, если значение рассчитанного запрошенного СПБ замедления Gспб превышает верхнее предельное значение Gмакс.
[0061] После получения команды на торможение СПБ ЭБУ 20 тормоза управляет тормозным приводом 21 так, чтобы получить запрошенное СПБ замедление Gспб. Это позволяет принудительно замедлить транспортное средство водителя, создавая фрикционное усилие торможения на передних и задних колесах справа и слева, без нажатия на педаль тормоза водителем.
[0062] Таким образом, управление автоматическим торможением представляет собой управление замедлением транспортного средства водителя путем создания фрикционных тормозных усилий на передних и задних колесах справа и слева в ответ на команду торможения СПБ.
[0063] Блок 13 управления автоматическим торможением определяет, превышает ли прогнозируемое время TTC до столкновения порог TTCb прекращения (назначается большим, чем порог TTCa активации) (TTC > TTCb), посредством управления автоматическим торможением. То есть блок 13 управления автоматическим торможением проверяет, уменьшается ли вероятность столкновения транспортного средства водителя с препятствием (удается ли избежать столкновения). Блок 13 управления автоматическим торможением прекращает передачу команды на торможение СПБ, если установлено, что вероятность столкновения транспортного средства водителя с препятствием уменьшается. Таким образом, прекращается управление автоматическим торможением, и одновременно с ним прекращается управление СПБ. Порог TTCb прекращения назначается большим, чем порог TTCa активации.
[0064] Альтернативно, блок 13 управления автоматическим торможением прекращает передачу команды на торможение СПБ, когда транспортное средство водителя останавливается посредством управления автоматическим торможением. Это означает, что управление автоматическим торможением прекращается. Блок 13 управления автоматическим торможением передает команду остановки на ЭБУ 20 тормоза в течение заранее заданного времени (например, 2 секунд) после прекращения управления автоматическим торможением. Пока поступает команда остановки, ЭБУ 20 тормоза управляет тормозным приводом 21 для подачи гидравлического давления на колесные цилиндры фрикционных тормозных механизмов 22 передних и задних колес справа и слева. Таким образом, состояние останавливания транспортного средства водителя сохраняется в течение заранее заданного времени. Управление СПБ прекращается по истечении заранее заданного времени сохранения состояния останавливания транспортного средства водителя. ЭБУ 20 тормоза передает команду включения лампы 42 стоп-сигнала на ЭБУ 40 измерений во время осуществления управления автоматическим торможением и во время нахождения транспортного средства водителя в состоянии останавливания.
[0065] Блок 13 управления автоматическим торможением передает команду на ограничение тяги с целью ограничения выходного крутящего момента двигателя (например, обнуления выходного крутящего момента двигателя) на ЭБУ 30 двигателя, пока осуществляется управление автоматическим торможением и транспортное средство водителя находится в состоянии останавливания. Даже если водитель нажимает на педаль акселератора во время осуществления управления автоматическим торможением, запрашиваемый водителем крутящий момент игнорируется, и транспортное средство водителя не ускоряется в ответ на нажатие педали акселератора.
[0066] Водитель может распознать препятствие и попытаться избежать столкновения, нажав на педаль акселератора. Если при этом выполняется управление автоматическим торможением, то запрашиваемый водителем крутящий момент будет проигнорирован, и приоритет не может быть отдан нажатию педали акселератора. Поэтому транспортное средство водителя не может двигаться по выбранной водителем траектории. Если транспортное средство водителя ошибочно приближается к препятствию вследствие ошибочного нажатия на педаль акселератора водителем, необходимо заблокировать передачу приоритета педали акселератора и осуществить управление автоматическим торможением.
[0067] ЭБУ 10 помощи при вождении содержит блок 14 блокировки, блок 15 ограничения блокировки и блок 16 определения особого типа для выполнения соответствующей передачи приоритета педали акселератора, то есть для соответствующего ограничения управления автоматическим торможением в зависимости от ситуации.
[0068] Блок 14 блокировки определяет, равна ли степень нажатия AP педали акселератора первому порогу AP1 степени нажатия педали или превышает его. Если будет установлено, что степень нажатия AP педали акселератора равна первому порогу AP1 степени нажатия педали или превышает его, блок 14 блокировки запрещает блоку 13 управления автоматическим торможением выполнять управление автоматическим торможением. Блок 13 управления автоматическим торможением не запускает управление автоматическим торможением, если управление автоматическим торможением было запрещено до выполнения управления автоматическим торможением (то есть AP равен или больше AP1). Блок 13 управления автоматическим торможением прекращает управление автоматическим торможением, если управление автоматическим торможением было запрещено во время выполнения управления автоматическим торможением (то есть AP увеличивается до уровня AP1 или большего значения).
[0069] Например, когда водитель сильно нажимает на педаль акселератора, чтобы обогнать движущееся впереди транспортное средство C2, как показано на ФИГ. 6, управление автоматическим торможением не осуществляется даже в том случае, если транспортное средство C1 быстро приближается к движущемуся впереди транспортному средству C2. Поэтому транспортное средство C1 водителя может двигаться по выбранной водителем траектории.
[0070] Когда транспортное средство водителя приближается к пешеходу или велосипеду, водитель, как правило, не совершает сильного нажатия на педаль акселератора. При обнаружении значительной степени нажатия педали акселератора в этой ситуации можно считать, что нажатие педали акселератора было ошибочным.
[0071] Блок 16 определения особого типа определяет, является ли обнаруженное препятствие «пешеходом или велосипедом (велосипедом, на котором едет человек)» или автомобилем. Если блок 16 определения особого типа обнаружит, что распознанное препятствие является «пешеходом или велосипедом», блок 15 ограничения блокировки ограничит действие блока 14 блокировки. Таким образом, блоку 13 управления автоматическим торможением не запрещено управление автоматическим торможением. Соответственно, если препятствием является «пешеход или велосипед», блок 13 управления автоматическим торможением выполняет управление автоматическим торможением независимо от степени нажатия AP нажатия педали акселератора. В результате передача приоритета педали акселератора не разрешается.
[0072] Иными словами, если блок 16 определения особого типа обнаруживает, что «распознанное препятствие является автомобилем», блок 15 ограничения блокировки не ограничивает действие блока 14 блокировки. Таким образом, блок 14 блокировки запрещает блоку 13 управления автоматическим торможением выполнять управление автоматическим торможением, если установлено, что степень нажатия AP педали акселератора равна первому порогу AP1 степени нажатия педали или превышает его, как было описано выше. В результате разрешается передача приоритета педали акселератора.
Алгоритм управления переключением между разрешением/блокировкой автоматического торможения
[0073]
Ниже будет подробно описан процесс переключения между разрешением/блокировкой автоматического торможения, который должен выполняться ЭБУ 10 помощи при вождении (функциональные блоки, соответствующие блоку 14 блокировки, блоку 15 ограничения блокировки и блоку 16 определения особого типа). На ФИГ. 2 показан алгоритм управления переключением между разрешением/блокировкой автоматического торможения, выполняемый ЭБУ 10 помощи при вождении. ЭБУ 10 помощи при вождении повторяет алгоритм управления переключением между разрешением/блокировкой автоматического торможения в каждый заранее заданный расчетный период. В дальнейшем алгоритм управления переключением между разрешением/блокировкой автоматического торможения называется просто «алгоритмом управления переключением».
[0074] Алгоритм управления переключением выполняется в период (период выполнения) с момента удовлетворения условия начала следующего выполнения до момента удовлетворения условия окончания следующего выполнения.
Условие начала выполнения алгоритма: Условие начала выполнения является удовлетворенным, если установлено, что вероятность столкновения транспортного средства водителя с препятствием высока (то есть прогнозируемое время TTC до столкновения достигло порога TTCa активации или меньшего значения). Если блок 14 блокировки запрещает управление автоматическим торможением (см. S14), как описано ниже, условие начала выполнения не удовлетворяется до тех пор, пока прогнозируемое время TTC до столкновения не достигнет порога TTCa активации или меньшего значения в отношении препятствия, отличающегося от препятствия, в отношении которого предпринята блокировка.
Условие окончания выполнения алгоритма: Условие окончания выполнения считается удовлетворенным в момент раньше момента определения предотвращения столкновения транспортного средства водителя с препятствием (то есть прогнозируемое время TTC до столкновения больше порога TTCb прекращения), а также момента, в который будет определена остановка транспортного средства водителя.
[0075] В начале выполнения алгоритма управления переключением ЭБУ 10 помощи при вождении на этапе S11 определяет, является ли целью предотвращения столкновения «пешеход или велосипед (велосипед, на котором едет человек)». Если целью предотвращения столкновения является «пешеход или велосипед» (S11: Да), ЭБУ 10 помощи при вождении выполняет переход на этап S12 для осуществления управления автоматическим торможением. То есть блок 15 ограничения блокировки ограничивает действие блока 14 блокировки, разрешая выполнение управления автоматическим торможением. В этом случае ЭБУ 10 помощи при вождении передает команду на торможение СПБ на ЭБУ 20 тормоза и команду на ограничение тяги на ЭБУ 30 двигателя.
[0076] Транспортное средство водителя замедляется с запрошенным СПБ замедлением Gспб в состоянии, в котором приоритет не может быть отдан педали акселератора. Таким образом, транспортное средство водителя может быть надежно замедлено даже в том случае, если, например, водитель совершает ошибочное нажатие.
[0077] Если цель предотвращения столкновения не является ни пешеходом, ни велосипедом (S11: Нет), то есть цель предотвращения столкновения является автомобилем, ЭБУ 10 помощи при вождении выполняет переход на этап S13. На этапе S13 ЭБУ 10 помощи при вождении считывает сигнал обнаружения с датчика степени нажатия педали акселератора и определяет, равна ли степень нажатия AP педали акселератора первому порогу AP1 степени нажатия педали акселератора или превышает его. Например, степень нажатия АР педали акселератора выражают в «%». Если степень нажатия AP педали акселератора меньше первого порога AP1 степени нажатия педали акселератора (S13: Нет), процесс переходит к этапу S12. Это приводит к тому, что управление автоматическим торможением выполняется.
[0078] Первый порог AP1 степени нажатия педали акселератора назначают равным значению, при котором степень нажатия AP педали акселератора может считаться значительно большой.
[0079] ЭБУ 10 помощи при вождении повторяет этот процесс и прекращает алгоритм управления переключением, когда удается предотвратить столкновение транспортного средства водителя с препятствием или когда транспортное средство водителя останавливается.
[0080] Если целью предотвращения столкновения является автомобиль, и при повторении алгоритма управления переключением степень нажатия AP педали акселератора увеличивается до первого порога AP1 степени нажатия педали акселератора или превышает его, или если степень нажатия AP педали акселератора равна первому порогу AP1 степени нажатия педали акселератора или превышает его в момент выполнения условия начала выполнения алгоритма управления переключением, то на этапе S13 результатом определения будет «Да». В этом случае ЭБУ 10 помощи при вождении выполняет переход на этап S14, чтобы заблокировать управление автоматическим торможением. То есть, блок 15 ограничения блокировки не ограничивает действие блока 14 блокировки, и блок 14 блокировки запрещает управление автоматическим торможением. В этом случае двигатель 32 выдает запрашиваемый водителем крутящий момент, описанный выше.
[0081] Например, если целью предотвращения столкновения является автомобиль, и на момент выполнения условия начала выполнения алгоритма управления переключением степень нажатия AP педали акселератора равна первому порогу AP1 степени нажатия педали акселератора или превышает его, ЭБУ 10 помощи при вождении не начинает управление автоматическим торможением. Таким образом, ЭБУ 10 помощи при вождении не передает ни команду на торможение СПБ на ЭБУ 20 тормоза, ни команду на ограничение тяги на ЭБУ 30 двигателя.
[0082] Если целью предотвращения столкновения является автомобиль, и в период выполнения алгоритма управления переключением степень нажатия AP педали акселератора увеличивается до первого порога AP1 степени нажатия педали акселератора или превышает его, ЭБУ 10 помощи при вождении прекращает управление автоматическим торможением в это время. Таким образом, ЭБУ 10 помощи при вождении прекращает передачу команды на торможение СПБ на ЭБУ 20 тормоза и команды на ограничение тяги на ЭБУ 30 двигателя.
[0083] Таким образом, транспортное средство водителя может передать приоритет педали акселератора. Соответственно, водитель может избежать столкновения, ускорив транспортное средство с помощью педали акселератора.
[0084] Как было описано выше, во устройстве помощи для предотвращения столкновения в этом примере осуществления изобретения управление автоматическим торможением осуществляется (управление автоматическим торможением разрешено) независимо от степени нажатия педали акселератора, если целью предотвращения столкновения является «пешеход или велосипед». Управления автоматическим торможением блокируется, если целью предотвращения столкновения является автомобиль, а также если степень нажатия педали акселератора равен первому порогу степени нажатия педали акселератора или превышает его. Таким образом, управление автоматическим торможением может быть применено в соответствующей ситуации.
[0085] Например, когда транспортное средство водителя приближается к «пешеходу или велосипеду», водитель, как правило, не нажимает с силой на педаль акселератора. Например, если водитель поздно обнаруживает «пешехода или велосипед», он может ошибочно сильно нажать на педаль акселератора вместо педали тормоза. В этом примере осуществления изобретения выполняется управление автоматическим торможением, и приоритет не может быть отдан нажатию педали акселератора. Таким образом, предотвращение столкновения может быть надлежащим образом осуществлено даже в случае ошибочного нажатия.
[0086] Например, когда водитель ускоряет свое транспортное средство, чтобы обогнать транспортное средство (другой автомобиль), движущееся впереди транспортного средства водителя, движущееся впереди транспортное средство может быть расценено как препятствие, поскольку транспортное средство водителя быстро приближается к движущемуся впереди транспортному средству в процессе обгона движущегося впереди транспортного средства. В этом примере осуществления изобретения, когда целью предотвращения столкновения является автомобиль и осуществляется сильное нажатие на педаль акселератора, управление автоматическим торможением блокируется, и приоритет может быть отдан нажатию педали акселератора. Таким образом, управление автоматическим торможением, не предусмотренное водителем, блокируется, и транспортное средство водителя может обогнать движущееся впереди транспортное средство по траектории, задуманной водителем. Кроме того, можно предотвратить чрезмерное приближение движущегося сзади транспортного средства к транспортному средству водителя.
Модифицированный пример 1
[0087]
Ниже описан Модифицированный пример 1 алгоритма управления переключением. На ФИГ. 3 показан алгоритм управления переключением в соответствии с Модифицированным примером 1. Алгоритм управления переключением согласно Модифицированному примеру 1 отличается добавлением процесса определения на этапе S15 в алгоритм управления переключением согласно примеру осуществления изобретения (ФИГ. 2). Прочие процессы аналогичны алгоритму управления переключением согласно изобретению. Совпадающие процессы обозначены на фигурах одинаковыми ссылочными обозначениями, что позволяет опустить их описание.
[0088] Если на этапе S13 будет определено, что степень нажатия AP педали акселератора меньше первого порога AP1 степени нажатия педали акселератора (S13: Нет), ЭБУ 10 помощи при вождении переходит к этапу S15. На этапе S15 ЭБУ 10 помощи при вождении определяет, равна ли степень нажатия AP педали акселератора второму порогу AP2 степени нажатия педали акселератора или превышает его, а также равна ли скорость AS нажатия педали акселератора порогу AS1 скорости нажатия или превышает его. Второй порог AP2 степени нажатия педали акселератора меньше первого порога AP1 степени нажатия педали акселератора, однако назначен равным значению, которое степень нажатия AP педали акселератора достигает только в том случае, если степень нажатия педали акселератора считается вызванной относительно сильным нажатием педали акселератора. Скорость AS нажатия педали акселератора – это изменение AP степени нажатия педали акселератора за единицу времени. Порог AS1 скорости нажатия педали акселератора назначен равным значению, которое скорость AS нажатия педали акселератора достигает только в том случае, если нажатие педали акселератора считается относительно быстрым.
[0089] Таким образом, алгоритм на этапе S15 определяет, выполнена ли относительно большая степень нажатия педали акселератора с относительно высокой скоростью нажатия, несмотря на то, что степень нажатия AP педали акселератора меньше первого порога AP1 степени нажатия педали акселератора.
[0090] Если установлено, что степень нажатия AP педали акселератора равна второму порогу AP2 степени нажатия педали акселератора или превышает его, и что скорость AS нажатия педали акселератора равна порогу AS1 скорости нажатия или превышает его (S15: Да), ЭБУ 10 помощи при вождении выполняет переход к этапу S14. Если результат определения отрицательный (S15: Нет), процесс переходит к этапу S12.
[0091] В Модифицированном примере 1 можно более подходящим образом установить условие срабатывания педали акселератора для блокировки управления автоматическим торможением. Это позволяет снизить вероятность того, что управления автоматическим торможением будет осуществляться во время намеренного нажатия педали акселератора водителем.
Модифицированный пример 2
[0092]
Ниже описан Модифицированный пример 2 алгоритма управления переключением. На ФИГ. 4 показан алгоритм управления переключением в соответствии с Модифицированным примером 2. Алгоритм управления переключением согласно Модифицированному примеру 2 отличается добавлением процесса определения на этапе S16 в алгоритм управления переключением согласно примеру осуществления изобретения (ФИГ. 2). Прочие процессы аналогичны алгоритму управления переключением согласно изобретению. Совпадающие процессы обозначены на фигурах одинаковыми ссылочными обозначениями, что позволяет опустить их описание.
[0093] В алгоритме управления переключением согласно изобретению управление автоматическим торможением выполняется полностью, если целью предотвращения столкновения является «пешеход или велосипед». В Модифицированном примере 2 управление автоматическим торможением прекращается, если во время выполнения управления автоматическим торможением будет распознано преднамеренное нажатие педали акселератора водителем.
[0094] Если на этапе S11 установлено, что целью предотвращения столкновения является «пешеход или велосипед» (S11: Да), ЭБУ 10 помощи при вождении выполняет переход на этап S16. На этапе S16 ЭБУ 10 помощи при вождении определяет, выполнено ли повторное нажатие педали акселератора. Повторное нажатие педали акселератора предполагает снятие ноги с нажатой педали акселератора и повторное нажатие педали акселератора. При этом определяется, совершалось ли ранее повторное нажатие педали акселератора во время управления автоматическим торможением.
[0095] ЭБУ 10 помощи при вождении считывает сигнал обнаружения с датчика степени нажатия педали акселератора и определяет, выполняется ли повторное нажатие педали акселератора. Например, повторное нажатие педали акселератора определяется при уменьшении степени нажатия педали акселератора до уровня, при котором педаль акселератора считается не нажатой, и последующем увеличении до уровня, при котором педаль акселератора считается нажатой.
[0096] Повторное нажатие педали акселератора можно считать действием водителя, направленным на ускорение своего транспортного средства. В этом случае приоритет отдается нажатию педали акселератора. Если установлено, что повторное нажатие педали акселератора выполняется во время управления автоматическим торможением (S16: Да), ЭБУ 10 помощи при вождении переходит к этапу S14. Это означает, что управление автоматическим торможением прекращается. Кроме того, приоритет может быть отдан нажатию педали акселератора. Таким образом, водитель может избежать столкновения, управляя транспортным средством.
[0097] Процесс определения на этапе S16 в Модифицированном примере 2 выполняется только в том случае, если целью предотвращения столкновения является «пешеход или велосипед». Процесс определения на этапе S16 может выполняться также в том случае, если целью предотвращения столкновения является автомобиль, как это имеет место в алгоритме управления переключением в Модифицированном примере 3, показанном на ФИГ. 5. То есть определение выполнения повторного нажатия педали акселератора производится тогда, когда результатом определения на этапе S11 и этапе S13 является «Нет». Если установлено, что выполнено повторное нажатие педали акселератора (S16: Да), процесс переходит к этапу S14.
[0098] Изобретение не ограничивается раскрытым выше примером осуществления устройства помощи для предотвращения столкновения; возможно внесение различных модификаций без отклонения от предмета изобретения.
[0099] Например, в этом примере осуществления изобретения целью предотвращения столкновения является пешеход, велосипед (на котором едет человек) или автомобиль, но возможны и другие варианты помимо этих трех типов.
[0100] Например, алгоритм управления переключением в Модифицированном примере 1 и алгоритм управления переключением в Модифицированном примере 2 (или в Модифицированном примере 3) могут быть объединены. На этапе S13 согласно ФИГ. 3 можно определить, равна ли скорость AS нажатия педали акселератора порогу AS1 скорости нажатия педали акселератора или превышает его.
[0101] Например, можно изменить порядок выполнения этапов S11 и S13 в алгоритме управления переключением. То есть, сначала может быть выполнен процесс определения на этапе S13, а процесс определения на этапе S11 может выполняться, если результатом определения на этапе S13 является «Да».
Реферат
Предложено устройство помощи для предотвращения столкновения, которое содержит тормозное устройство, средство обнаружения препятствия, средство управления автоматическим торможением без вмешательства водителя при определении того, что транспортное средство водителя с высокой вероятностью может столкнуться с препятствием, средство блокировки автоматического торможения для блокировки управления автоматическим торможением при определении того, что значение показателя нажатия педали акселератора равно порогу нажатия педали или превышает его. Значение показателя нажатия педали акселератора коррелирует с нажатием педали акселератора водителем. Устройство помощи для предотвращения столкновения содержит средство определения, является ли тип препятствия предварительно заданным особым типом и ограничительное средство для ограничения действия средства блокировки автоматического торможения при определении того, что препятствие является предварительно заданным особым типом препятствия, чтобы средство блокировки автоматического торможения не блокировало управление автоматическим торможением. Достигается содействие для предотвращения столкновения. 3 з.п. ф-лы, 6 ил.
Комментарии