Способ помощи при парковке и устройство помощи при парковке - RU2734740C1
Код документа: RU2734740C1
Чертежи





Описание
Область техники
[0001]
Настоящее изобретение относится к способу помощи при парковке и устройству помощи при парковке.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известен способ помощи при парковке, который ищет незанятые места парковки и предпочтительно отображает место парковки, рекомендованное для парковки, как раскрыто в патентном документе 1. Способ, раскрытый в патентном документе 1, определяет степень сложности парковки на основе таких условий, как расстояние от транспортного средства (движущийся объект), время, необходимое для парковки, и простота покидания места парковки, и предпочтительно отображает место парковки, где легче осуществить парковку, когда есть несколько незанятых мест парковки.
СПИСОК ЦИТИРУЕМЫХ ССЫЛОК
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: WO 2012/143033
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004]
Способ, раскрытый в патентном документе 1, поддерживает обнаружение границы парковки между незанятыми местами парковки, частично скрытыми посредством движущегося объекта, вторгающегося в соответствующие места парковки, которую могут не отображать вспомогательные изображения в соответствующих позициях, чтобы надлежащим образом указывать доступные незанятые места парковки.
[0005]
Для решения традиционной проблемы, описанной выше, настоящее изобретение предоставляет способ помощи при парковке и устройство помощи при парковке, способные отображать вспомогательное изображение в соответствующей позиции, когда движущийся объект вторгается на незанятое место парковки.
[0006]
Способ помощи при парковке в соответствии с аспектом настоящего изобретения определяет, вторгается ли движущийся объект на незанятое место парковки, и запрещает отображение вспомогательного изображения в отношении незанятого места (??) парковки, в отношении которого определено, что движущийся объект вторгается в периферийном изображении.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ
[0007]
Аспект настоящего изобретения запрещает отображение вспомогательного изображения на незанятом месте парковки, в отношении которого определяется, что движущийся объект вторгается, так чтобы указать это вспомогательное изображение в соответствующей позиции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
[Фиг.1] Фиг.1 является блок–схемой, показывающей конфигурацию устройства помощи при парковке в соответствии с вариантом осуществления настоящего изобретения.
[Фиг.2] Фиг.2 является пояснительным видом, показывающим изображение сверху, когда транспортное средство, находящееся на дороге на парковочной стоянке, ищет незанятое место парковки.
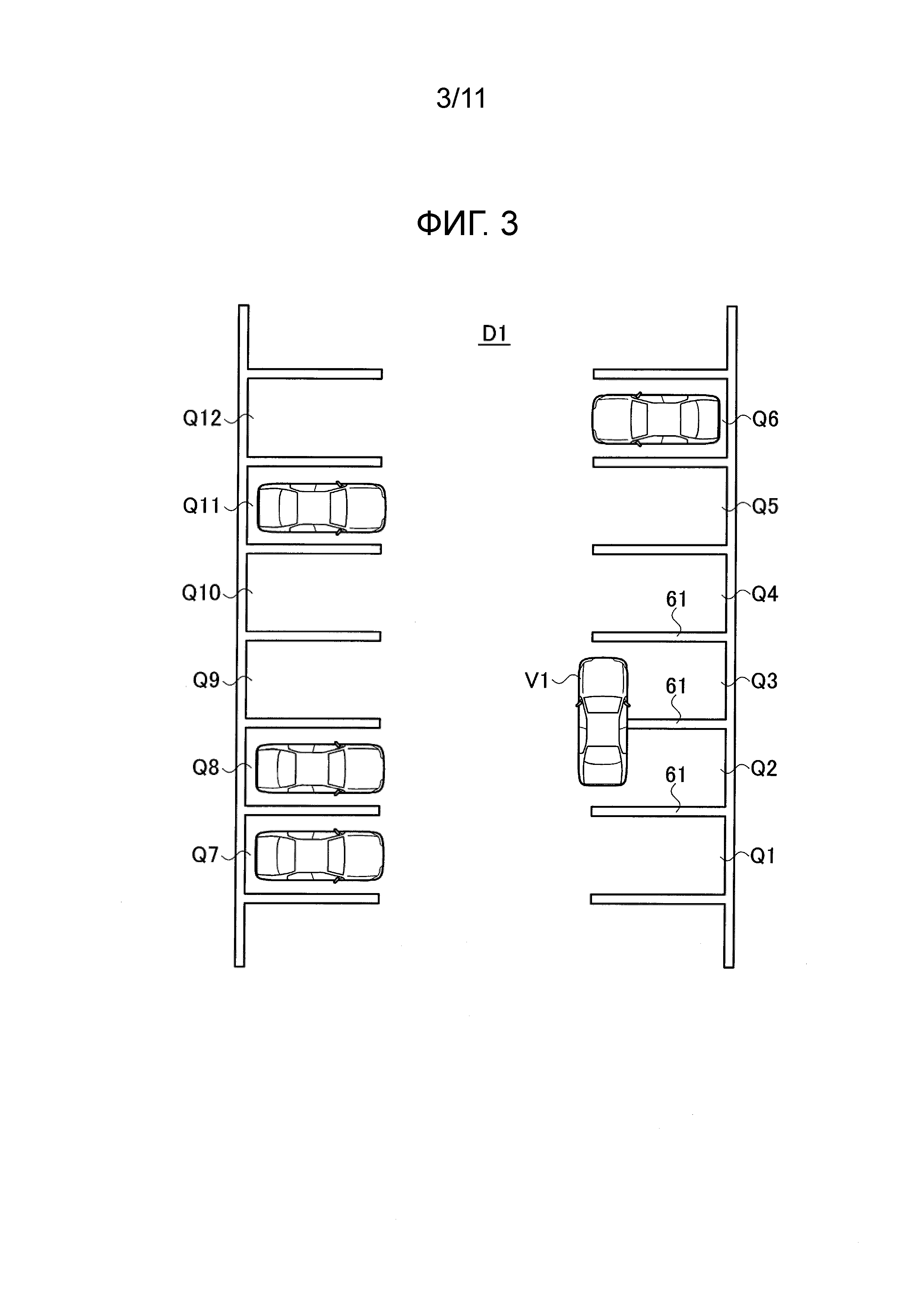
[Фиг.3] Фиг.3 является пояснительным видом, показывающим изображение сверху, когда транспортное средство ищет незанятое место парковки в то же время вторгаясь на незанятое место парковки на парковочной стоянке.
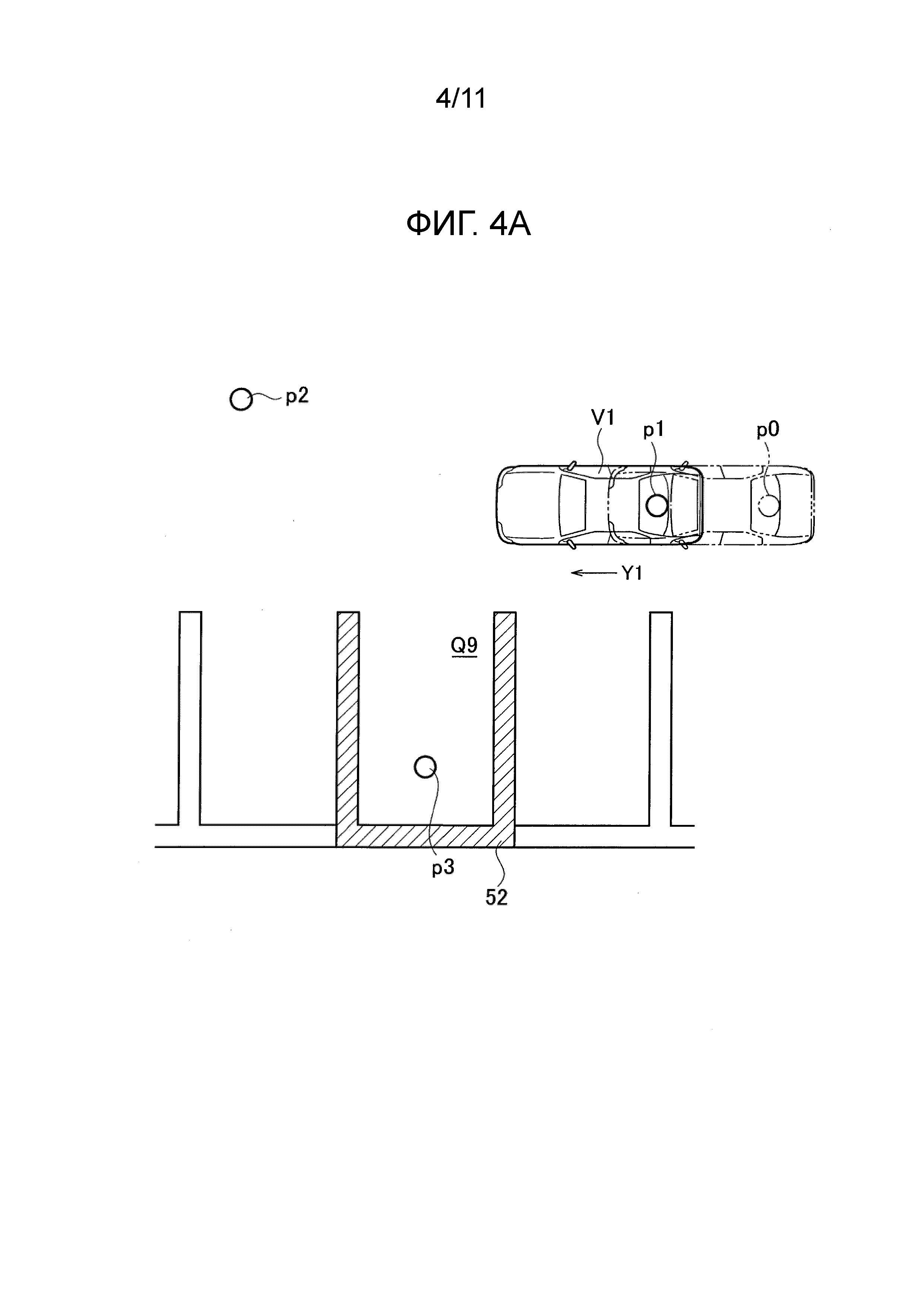
[Фиг.4A] Фиг.4A является видом, показывающим пример изображения, включающего в себя транспортное средство и границу места парковки в качестве цели парковки.
[Фиг.4B] Фиг.4B является видом, показывающим пример изображения, включающего в себя транспортное средство, границу места парковки в качестве цели парковки и траекторию парковки.
[Фиг.5A] Фиг.5A является пояснительным видом, показывающим взаимное расположение транспортного средства и границы парковки, когда определено, что транспортное средство не движется по границе парковки.
[Фиг.5B] Фиг.5B является пояснительным видом, показывающим взаимное расположение транспортного средства и границы парковки, когда определено, что транспортное средство движется по границе парковки.
[Фиг.6] Фиг.6 является последовательностью операций, показывающей процесс обработки, исполняемой посредством устройства помощи при парковке, в соответствии с первым вариантом осуществления настоящего изобретения.
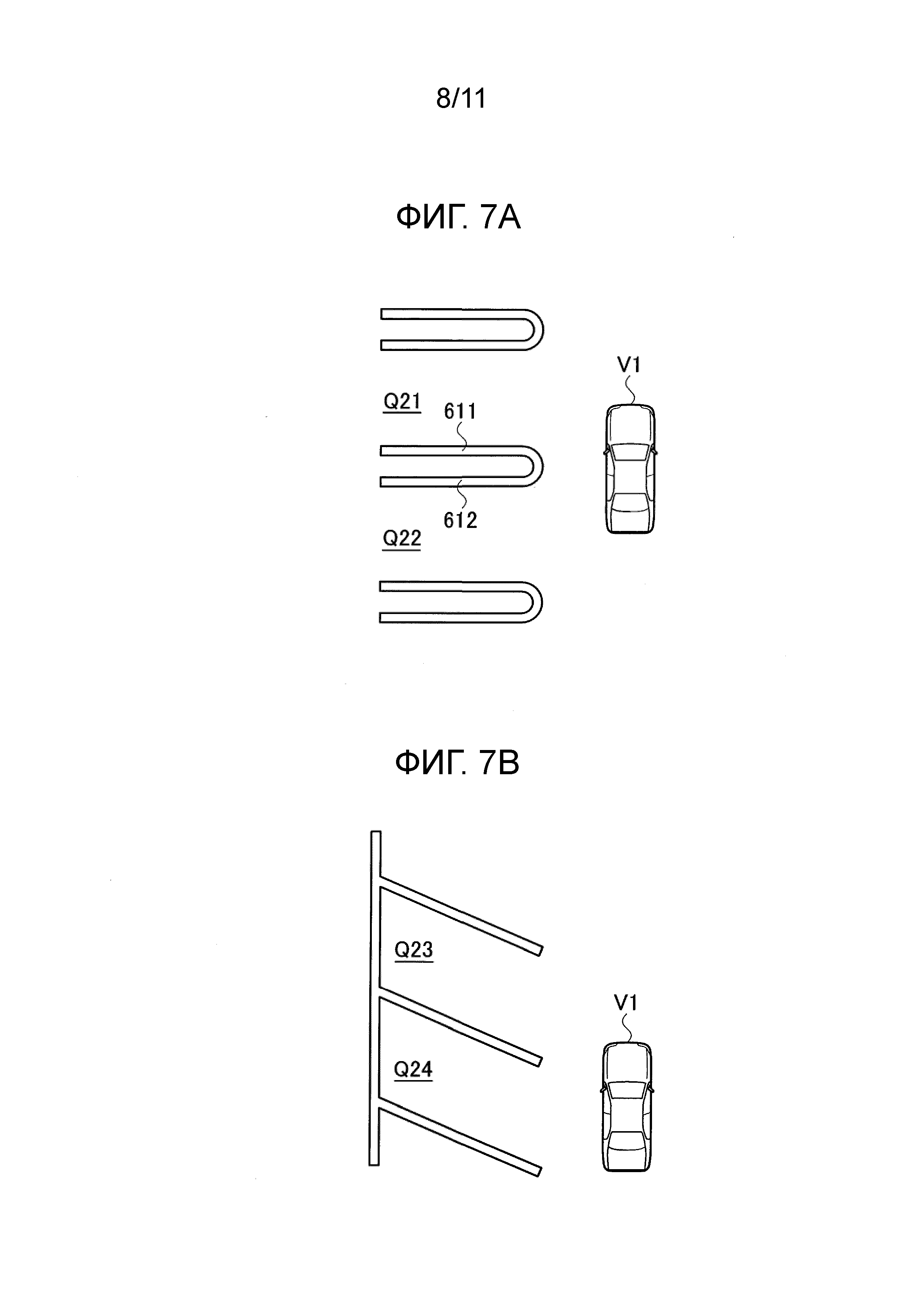
[Фиг.7A] Фиг.7A является пояснительным видом, показывающим пример, в котором каждая граница парковки удваивается.
[Фиг.7B] Фиг.7B является пояснительным видом, показывающим пример, в котором границы парковки находятся под уклоном по отношению к дороге транспортного средства.
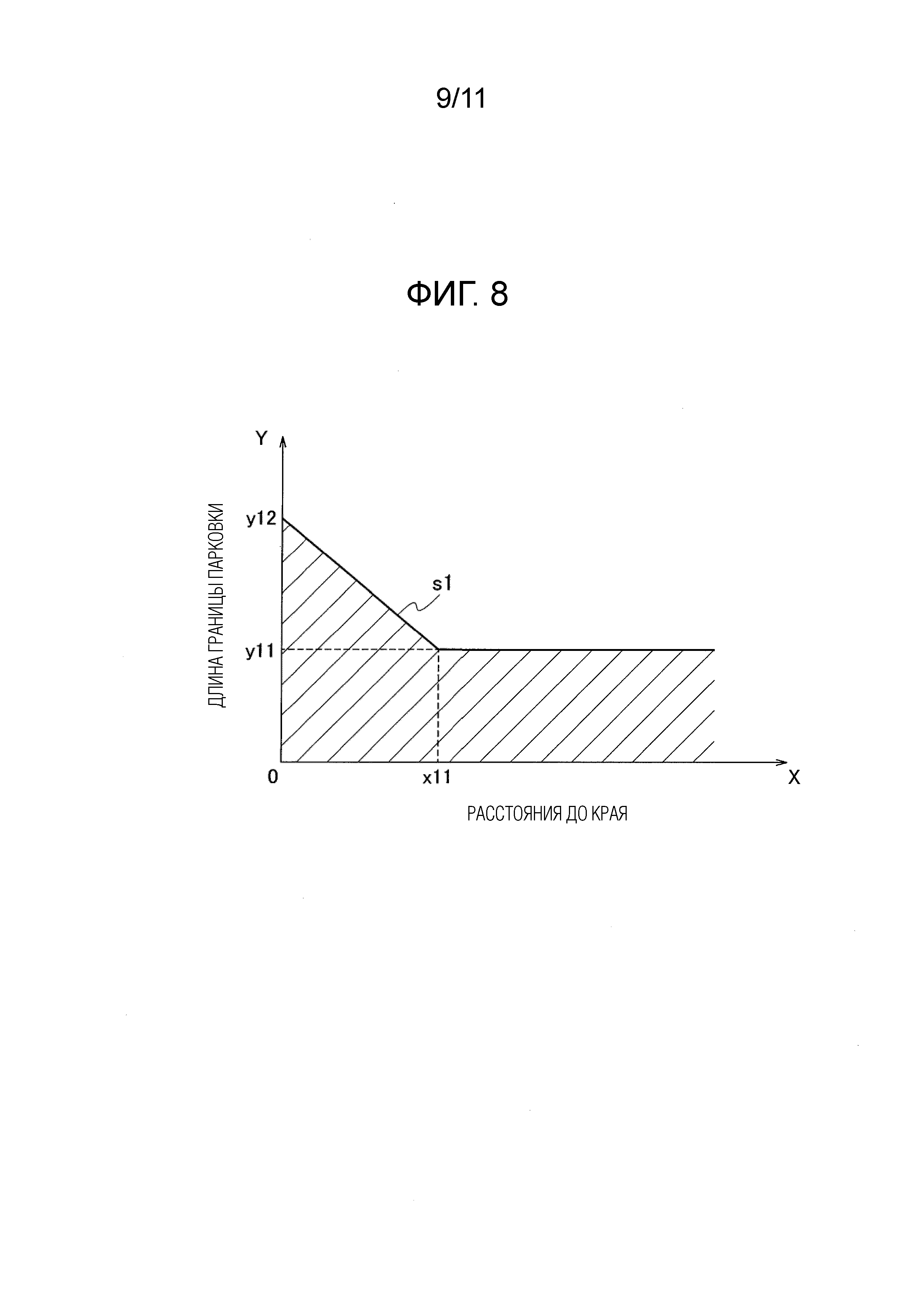
[Фиг. 8] Фиг.8 является графиком, показывающим расстояние от транспортного средства до края границы парковки на оси абсцисс и пороговое значение длины границы парковки на оси ординат.
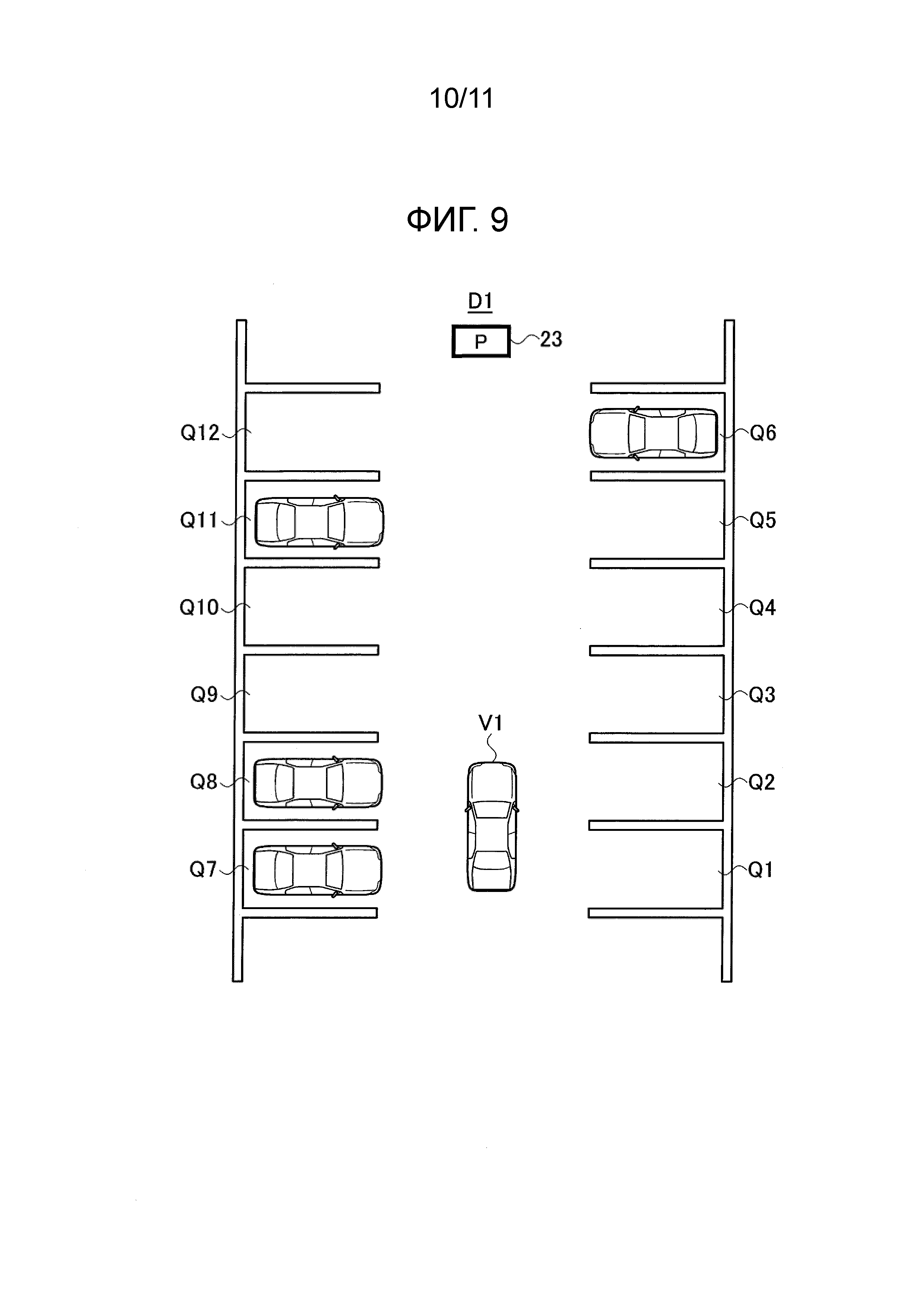
[Фиг.9] Фиг.9 является пояснительным видом, показывающим пример, в котором маркер доступности парковки указывается на изображении сверху.
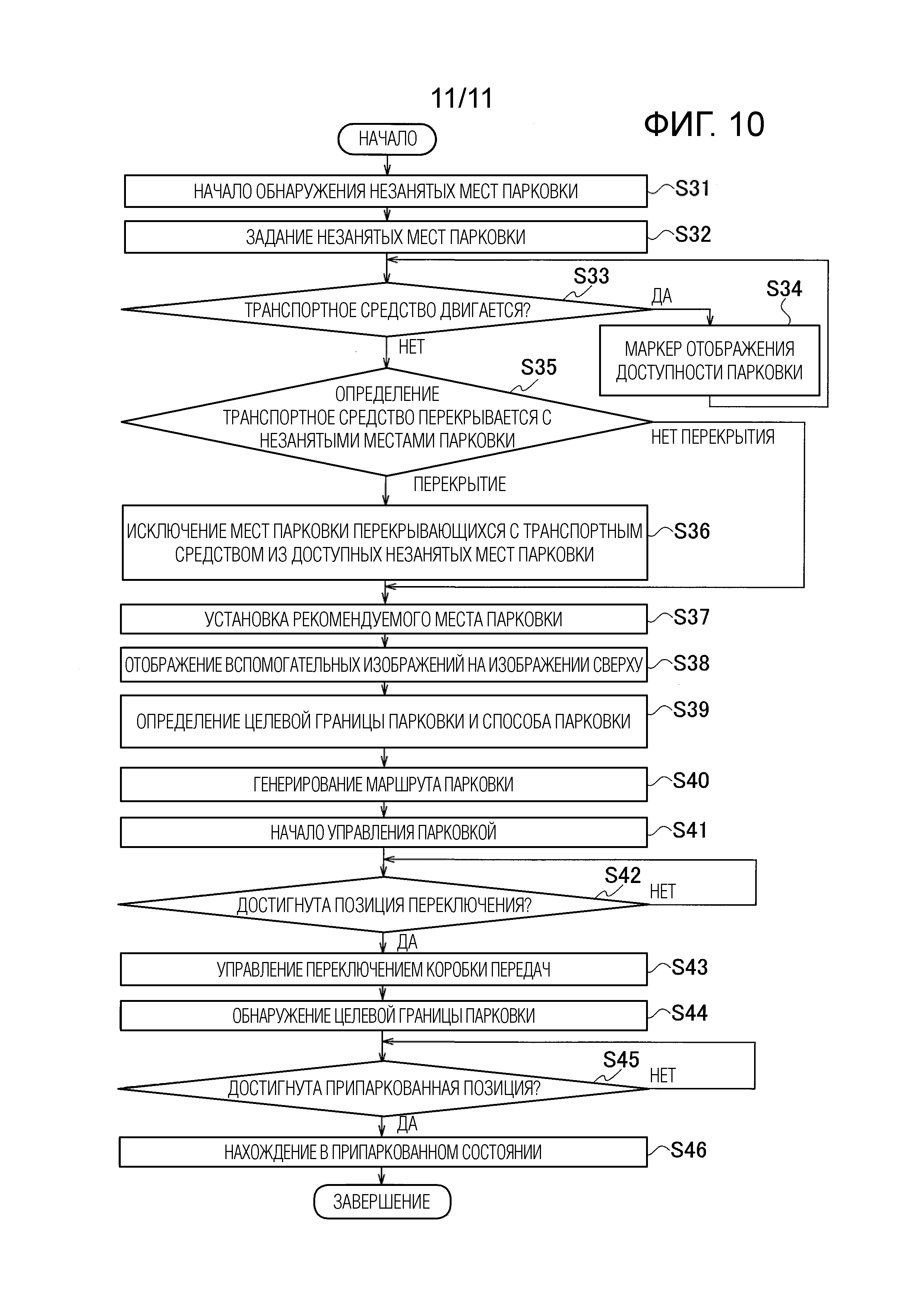
[Фиг.10] Фиг.10 является последовательностью операций, показывающей процесс обработки, исполняемый посредством устройства помощи при парковке, согласно третьему варианту осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ[0009]
Ниже варианты осуществления согласно настоящему изобретению описаны со ссылкой на чертежи. Соответствующие варианты осуществления, описанные ниже, иллюстрируются с транспортным средством в качестве движущегося объекта.
[Объяснение конфигурации первого варианта осуществления]
Фиг.1 является блок–схемой, показывающей конфигурацию устройства помощи при парковке, к которому применяется способ помощи при парковке, согласно первому варианту осуществления настоящего изобретения. Используемый в настоящем варианте осуществления термин «парковка» относится к процессу движения по направлению к незанятому месту парковки, чтобы остановиться на месте парковки. Что касается автомобиля, термин «парковка» относится к процессу движения на незанятое место парковки на парковочной стоянке, чтобы остановиться, таким образом припарковать автомобиль на месте парковки. Используемый в настоящем варианте осуществления термин «управление помощью при парковке» включает в себя процесс указания незанятого места парковки в качестве цели для парковки вокруг основного транспортного средства пассажиру, уведомляя пассажира об операциях парковки по направлению к цели парковки и исполнение автономной парковки, чтобы самостоятельно припарковаться в цели парковки.
[0010]
Как показано на фиг.1, устройство помощи при парковке в соответствии с настоящим вариантом осуществления включает в себя контроллер 1, камеры 2a, 2b, 2c, 2d, блок 3 отображения, электронный блок управления (ECU) 4 управлением транспортным средством и исполнительный механизм 5. Контроллер 1 соединен с интерфейсом 6 ввода, датчиком 7 угла поворота рулевого колеса, датчиком 8 скорости вращения колеса и датчиком 9 пространственной перспективы.
Интерфейс 6 ввода представляет собой терминал, через который пассажир в транспортном средстве вводит различные виды информации в отношении парковки, и представляет собой джойстик или переключатель операций. Сенсорная панель, предоставленная в блоке 3 отображения, также может использоваться в качестве интерфейса 6 ввода.
[0011]
Камера 2а смонтирована на передней стороне транспортного средства для захвата изображения передней стороны транспортного средства. Камера 2b смонтирована на задней стороне транспортного средства, чтобы захватывать изображения задней стороны транспортного средства. Камера 2с смонтирована на правой стороне транспортного средства, чтобы захватывать левую сторону изображения транспортного средства. Камера 2d смонтирована на левой стороне транспортного средства для захвата правой стороны изображения транспортного средства. Соответствующие камеры смонтированы под крышей автомобиля.
Поскольку соответствующие камеры 2a–2b расположены под крышей транспортного средства, изображение, захваченное сверху транспортного средства, фактически не может быть отображено. А именно, любое фактическое изображение транспортного средства, захваченное соответствующими камерами, недоступно. Устройство помощи при парковке, таким образом, использует значок транспортного средства (изображение, имитирующее транспортное средство) вместо фактического изображения транспортного средства.
Блок 3 отображения может быть жидкокристаллическим дисплеем для навигации транспортного средства, установленным в салоне, или существующим монитором, прикрепленным к терминалу дистанционного управления.
[0012]
ECU 4 управлением транспортного средства включает в себя блок 41 управления углом поворота рулевого колеса для управления углом поворота рулевого колеса транспортного средства и блок 42 управления скоростью для управления скоростью транспортного средства, и соединен с исполнительным механизмом 5 для вождения, торможения и рулевого управления транспортным средством.
[0013]
Контроллер 1 включает в себя схему генерирования периферийного изображения (блок генерирования периферийного изображения) для генерирования изображения 11 сверху (изображение, показывающее вид сверху) транспортного средства на основе изображений, захваченных соответствующими камерами 2a–2d, схему 12 установки целевого места парковки для установки места парковки в качестве цели для парковки транспортного средства, схему 13 управления помощью при парковке для помощи при парковке транспортного средства в целевом месте парковки, установленным посредством схемы 12 установки целевого места парковки, и блок 14 компоновки изображения.
[0014]
Контроллер 1 может быть реализован посредством микрокомпьютера, включающего в себя центральный процессор (CPU), запоминающее устройство и модуль ввода–вывода. Компьютерная программа для изготовления контроллера 1 инсталлируется на микрокомпьютер и исполняется таким образом, что микрокомпьютер функционирует как схема 11 генерирования периферийного изображения, схема 12 установки целевого места парковки, схема 13 управления системой помощи при парковке и блок 14 компоновки изображения, включенные в контроллер 1. Альтернативно, специализированное аппаратное обеспечение может быть использовано для реализации соответствующих функций контроллера 1. Контроллер 1 не обязательно установлен в транспортном средстве и может быть реализован посредством связи с базовой станцией.
[0015]
Схема 11 генерирования периферийного изображения устанавливает предварительно определенную виртуальную визуальную точку и проецируемую плоскость на основе периферийных изображений, захваченных посредством четырёх камер 2a–2d, чтобы сгенерировать изображение, как направленный вниз вид сверху транспортного средства (в направлении к транспортному средству). Это изображение называется «изображением сверху». Изображение сверху представляет собой изображение периферии транспортного средства, если смотреть сверху транспортного средства. Способ генерирования изображения сверху хорошо известен, и конкретные пояснения ниже опущены. Настоящий вариант осуществления не обязательно использует изображение сверху и только требует использовать изображение, которое указывает периферию транспортного средства (периферийное изображение), такое как изображение с высоты птичьего полета.
Альтернативно, схема 11 генерации периферийного изображения может принимать изображения, захваченные камерами, установленными на парковке, или камерами, установленными в других транспортных средствах, так чтобы генерировать изображение сверху. Настоящий вариант осуществления не обязательно отображает изображение, имитирующее транспортное средство (значок транспортного средства), при использовании изображения, захваченного сверху транспортного средства.
[0016]
Схема 12 установки целевого места парковки включает в себя блок 121 обнаружения незанятого места парковки, блок 123 установки рекомендуемого места парковки (схема установки рекомендуемого места парковки), блок 124 генерирования вспомогательного изображения и блок 125 управления переключением отображения (схема отображения изображения). Транспортное средство ведется так, чтобы въехать на парковку на целевом месте парковки путем ручного или автономного вождения.
[0017]
Блок 121 обнаружения незанятых мест парковки обнаруживает незанятые места парковки из изображения сверху, сгенерированного посредством схемы 11 генерирования периферийного изображения. Блок 121 обнаружения незанятых мест парковки обнаруживает границы парковки, обнаруживая линии разделения, такие как белые линии, представленные на изображении сверху, чтобы распознавать области, определенные посредством границ парковки, в качестве мест парковки. Альтернативно, блок 121 обнаружения незанятых мест парковки может обнаруживать границы парковки посредством использования датчика пространственной перспективы, такого как инфракрасный радар, лазерный дальномер (LRF) или камеру. Блок 121 обнаружения незанятых мест парковки дополнительно определяет, припаркованы ли транспортные средства в пределах обнаруженных границ парковки посредством обработки изображений. Блок 121 обнаружения незанятых мест парковки обнаруживает границу парковки, на которой нет транспортного средства, которое припарковано, в качестве незанятого места парковки.
[0018]
Блок 123 установки рекомендуемого места парковки устанавливает в качестве рекомендуемого места парковки незанятое место парковки, определенное как наиболее простое для парковки среди незанятых мест парковки, обнаруженных посредством блока 121 обнаружения незанятых мест парковки, с учетом таких условий, как расстояние от транспортного средства, наличие или отсутствие уклона, времени, необходимого для парковки, и простоты ухода с места парковки.
[0019]
Блок 124 генерирования вспомогательного изображения выводит вспомогательные изображения на блок 125 управления переключением отображения, указывающим незанятые места парковки, определенные как доступные посредством блока 125 управления переключением отображения. Блок 124 генерирования вспомогательного изображения также соединен с интерфейсом 6 ввода. Когда сигнал ввода для установки места парковки вводится из интерфейса 6 ввода, блок 124 генерирования вспомогательного изображения распознает границу парковки места парковки, установленную посредством сигнала ввода (в дальнейшем именуемая как «целевая граница парковки»). Блок 124 генерирования вспомогательного изображения генерирует изображение границы парковки целевой границы парковки (см. ссылочную позицию 52 на Фиг. 4A) и выводит изображение на блок 125 управления переключением отображения.
[0020]
В частности, когда незанятые места парковки определены как доступные посредством блока 125 управления переключением отображения, блок 124 генерирования вспомогательного изображения выводит и распределяет вспомогательные изображения соответствующим незанятым местам парковки. Когда цель парковки установлена, в отношении которой выполняется помощь при парковке, блок 124 генерирования вспомогательного изображения генерирует вспомогательное изображение, указывающее цель парковки в качестве доступного незанятого места парковки (например, изображение границы парковки, показывающее целевую границу парковки), для вывода изображения на блок 125 управления переключением отображения. Кроме того, когда рекомендуемое место парковки обнаружено из множества незанятых мест парковки, блок 124 генерирования вспомогательного изображения выводит вспомогательное изображение, указывающее рекомендуемое место парковки в качестве доступного незанятого места парковки, на блок 125 управления переключением отображения. Кроме того, когда незанятые места парковки обнаружены вокруг транспортного средства, блок 124 генерирования вспомогательного изображения выводит вспомогательные изображения, указывающие незанятые места парковки, на блок 125 управления переключением отображения. Вспомогательное изображение, указывающее цель парковки, вспомогательное изображение, указывающее рекомендуемое место парковки, и вспомогательные изображения, указывающие незанятые места парковки, могут отображаться различимо. Обработка помощи при парковке, которая должна выполняться в отношении цели парковки, рекомендуемого места парковки или незанятых мест парковки, является такой, как описано выше.
[0021]
Блок 125 управления переключением отображения управляет вспомогательными изображениями, сгенерированными посредством модуля 124 генерирования вспомогательных изображений, которые должны быть указаны на изображении сверху. Блок 125 управления переключением отображения использует информацию, полученную от датчика 9 пространственной перспективы, схемы 11 генерирования периферийного изображения и блока 132 оценки текущей позиции, чтобы определить, не вторгается ли транспортное средство на незанятые места парковки. Определение того, вторгается (входит) ли транспортное средство на незанятые места парковки, может быть осуществлено посредством использования изображения, сгенерированного посредством схемы 11 генерирования периферийного изображения, или может быть осуществлено в соответствии с соотношением между периферийными условиями, обнаруженными посредством датчика 9 пространственной перспективы, и собственной позицией транспортного средства, обнаруженной посредством блока 132 оценки текущей позиции. Блок 125 управления переключением отображения переключается между отображением вспомогательных изображений, указывающих, доступны ли незанятые места парковки, и запрещением отображения вспомогательных изображений, в зависимости от определения того, вторгается ли транспортное средство на незанятые места парковки. Когда вспомогательные изображения запрещены к отображению, изображение сверху (периферийное изображение), показывающее соответствующие незанятые места парковки, отображается.
[0022]
Когда транспортное средство вторгается (входит) в места парковки, например, когда транспортное средство V1, въезжающее на парковочную стоянку D1, движется по границе 61 парковки, разделяющей места Q2 и Q3 парковки, как показано на фиг.3, блок 125 управления переключением отображения запрещает указание вспомогательных изображений над местами Q2 и Q3 парковки, разделенными посредством соответствующей границей 61 парковки. Блок 125 управления переключением отображения затем устанавливает рекомендуемое место парковки, выбранное из незанятых мест парковки, исключая места Q2 и Q3 парковки. Способ определения того, движется ли транспортное средство V1 по границе 61 парковки (вторгается ли транспортное средство V1 на незанятые места парковки), описан ниже.
[0023]
Когда вспомогательные изображения выводятся из блока 125 управления переключением отображения, блок 14 компоновки изображений объединяет изображение сверху со вспомогательными изображениями для отображения объединенного изображения в блоке 3 отображения. Фиг.2 является пояснительным видом, показывающим изображение, на котором вспомогательное изображение 21 отображается на изображении сверху вокруг транспортного средства V1. Например, когда место Q9 парковки установлено в качестве рекомендуемого места парковки, выбранного из других незанятых мест парковки, вспомогательное изображение 21 отображается вокруг рекомендуемого места Q9 парковки в рамках изображения сверху. Таким образом, пассажир транспортного средства V1 может интуитивно распознавать позицию рекомендованного места Q9 парковки. Кроме того, изображение границы парковки целевой границы парковки отображается на блоке 3 отображения при выводе из блока 125 управления переключением отображения. Как показано на Фиг.4А, например, увеличенное изображение границы парковки вокруг целевой границы 52 парковки отображается вместе с изображением транспортного средства V1, так что пассажир может распознавать детальное взаимное расположение между целевой границей 52 парковки и транспортным средством V1.
[0024]
Схема 13 управления помощью при парковке включает в себя блок 131 установки стартовой позиции парковки, блок 132 оценки текущей позиции, блок 133 генерирования маршрута парковки, блок 134 последующего управления и блок 135 генерирования целевой скорости, как показано на Фиг. 1. Схема 13 управления системой помощи при парковке соединена с датчиком 7 угла поворота рулевого колеса, датчиком 8 скорости вращения колеса и датчиком 9 пространственной перспективы.
[0025]
Датчик 7 угла поворота рулевого колеса обнаруживает угол поворота рулевого колеса транспортного средства при парковке на незанятом месте парковки (или пока не будет завершена парковка). Датчик 7 угла поворота рулевого колеса при обнаружении угла поворота рулевого колеса транспортного средства может либо непосредственно обнаруживать направление шин, либо обнаруживать угол поворота рулевого колеса по углу руля. Обнаруженный угол поворота выводится на блок 132 оценки текущей позиции.
[0026]
Датчик 8 скорости вращения колеса вычисляет скорость вращения колес. Затем скорость транспортного средства обнаруживается в соответствии со скоростью вращения колеса. Обнаружение угла поворота рулевого колеса не обязательно выполняется непрерывно до тех пор, пока парковка не будет завершена, и угол поворота рулевого колеса только требуется вычислить в заранее определенное время. Данные обнаруженной скорости транспортного средства выводятся на блок 132 оценки текущей позиции.
[0027]
Датчик 9 пространственной перспективы используется для обнаружения препятствий, присутствующих вокруг транспортного средства, и может быть, например, лазерным дальномером (LRF). LRF испускает инфракрасный лазерный луч, направленный на объект, и измеряет расстояние до объекта в соответствии с интенсивностью отраженного света. Измерение с помощью LRF может получать расстояние до объекта в виде информации облака точек. Обнаруженные данные выводятся на блок 131 установки стартовой позиции парковки и в блок 133 генерирования маршрута парковки. Альтернативно, в качестве датчика 9 пространственной перспективы может быть использован парктроник, использующий ультразвуковые волны, монокулярная камера или стереокамера, включающая, например, пару камер. Датчик пространственной перспективы 9 требуется только для обнаружения расстояния до объекта и наличия или отсутствия объекта.
[0028]
Блок 131 установки стартовой позиции парковки устанавливает стартовую позицию парковки при парковке транспортного средства V1 в пределах целевой границы 52 парковки. Блок 131 установки стартовой позиции парковки вычисляет прямой маршрут, прямое расстояние, обратный маршрут и обратное расстояние для движения транспортного средства к целевой границе парковки в соответствии с обнаруженными данными датчика 9 пространственной перспективы, чтобы установить стартовую позицию парковки на основе результатов вычислений.
[0029]
Блок 132 оценки текущей позиции оценивает текущую позицию транспортного средства V1, например, на основании обнаруженных данных, обнаруженных посредством датчика 8 скорости вращения колеса и датчика 7 угла поворота рулевого колеса. Что касается транспортного средства с управлением передними колесами, имеющего очень низкую скорость, то средство точного расчета обычно используется для оценки позиции и расположения транспортного средства в соответствии с соотношением между расстоянием передвижения на основе оси заднего колеса и угла управления передними колесами. Точный расчет эффективен при операции передвижения в ограниченном участке, такой как операция парковки. Альтернативно, текущая позиция может быть оценена в соответствии с относительным взаимным расположением между транспортным средством V1 и данными, обнаруженными посредством датчика 9 пространственной перспективы, или относительным взаимным расположением между транспортным средством V1 и белыми линиями на поверхности дороги, захваченными посредством камер 2a–2d, или в результате распознавания объекта, например. Настоящий вариант осуществления оценивает, что транспортное средство V1 находится в текущей позиции p0, как показано на Фиг. 4A. В настоящем варианте осуществления также оценивается, что положение транспортного средства показано в направлении, указанном стрелкой Y1 (слева на фиг. 4A). А именно, оценивается начальная позиция и направление транспортного средства V1 относительно целевой границы 52 парковки. Блок 132 оценки текущей позиции может оценивать текущую позицию транспортного средства V1 с помощью глобальной навигационной спутниковой системы (GNSS).
[0030]
Блок 133 генерирования маршрута парковки вычисляет маршрут от стартовой позиции парковки, установленной посредством блока 131 установки стартовой позиции парковки, до позиции, в которой транспортное средство V1 завершает парковку на целевой границе 52 парковки, и генерирует изображение, указывающее маршрут на периферийном изображении транспортного средства V1. Блок 133 генерирования маршрута парковки отображает сгенерированное изображение на блоке 3 отображения. Как показано на фиг.4B, например, маршруты L1 и L2 отображаются, начиная со стартовой позиции p1 парковки транспортного средства V1 до парковочной позиции p3, предоставленной на целевой границе 52 парковки. Кроме того, также отображается позиция p2 переключения (позиция, в которой движение вперед переключается на движение назад).
[0031]
Блок 134 последующего управления вычисляет целевой угол поворота рулевого колеса для вынуждения транспортного средства V1 передвигаться на основе текущей позиции вдоль маршрутов L1 и L2 парковки, установленных посредством блока 133 генерации маршрута парковки, и выводит вычисленный угол на блок 41 управления углом поворота рулевого колеса. Блок 41 управления углом поворота рулевого колеса выводит команду управления на исполнительный механизм 5, так чтобы установить угол поворота рулевого колеса транспортного средства на целевой угол поворота рулевого колеса.
[0032]
Блок 135 генерирования целевой скорости вычисляет целевую скорость для вынуждения транспортного средства V1 передвигаться по маршрутам L1 и L2 парковки и выводит вычисленную скорость на блок 42 управления скоростью. Блок 42 управления скоростью выводит команду управления на исполнительный механизм 5, так чтобы установить скорость транспортного средства на целевую скорость.
[0033]
Как используется в настоящем варианте осуществления, термин «автономное вождение» относится к состоянию, в котором по меньшей мере один из исполнительных механизмов, включающих в себя тормоз (торможение), акселератор (вождение) и руль (пилотирование), управляется без задействования водителем. Остальные исполнительные механизмы могут задействоваться водителем, пока, по меньшей мере, один исполнительный механизм находится под управлением. Как используется в настоящем варианте осуществления, термин «ручное вождение» относится к состоянию, в котором водитель приводит в действие тормоз, ускорение и рулевое управление, чтобы предпринять необходимые действия для передвижения. Исполнение автономного вождения может снизить рабочую нагрузку пассажира, который паркует транспортное средство.
[0034]
[Объяснение определения движения по местам парковки]
Процесс определения того, вторгается (входит) ли транспортное средство в места парковки, осуществляется посредством блока 125 управления переключением отображения, описанного ниже. Согласно настоящему варианту осуществления транспортное средство V1 определяется как вторгнувшееся в (на) места парковки, когда расстояние между транспортным средством и краем границы парковки соответствующих мест парковки равно нулю, а длина границы парковки является заранее определенным расстоянием L11 (второе пороговое значение) или меньше. Заранее определенное расстояние L11 предпочтительно устанавливается немного короче средней длины границ парковки.
[0035]
Фиг.5A является пояснительным видом, схематично показывающим состояние, в котором транспортное средство V1 передвигается в позицию дальше от мест Q11 и Q12 парковки. Позиция границы 61 парковки, разделяющей места Q11 и Q12 парковки, может быть обнаружена посредством извлечения белых линий из изображений, захваченных, например, камерами 2a–2d, или может быть обнаружена с помощью датчика пространственной перспективы, такого как LRF.
[0036]
Как показано на фиг.5A, вычисляется расстояние x1 между транспортным средством V1 и краем 61a границы 61 парковки, смежной с транспортным средством V1. Длина y1 границы 61 парковки также вычисляется. Транспортное средство V1 отделено от края 61a расстоянием x1, которое не равно нулю. Длина y1 границы 61 парковки также является заранее определенным расстоянием L11 или больше, так что транспортное средство V1 определяется как не движущееся по границе 61 парковки или не вторгнувшееся на незанятые места Q2 и Q3 парковки, разделенные границей 61 парковки. А именно, незанятые места Q2 и Q3 парковки распознаются как доступные незанятые места парковки.
[0037]
Когда транспортное средство V1 движется по границе 61 парковки, как показано на фиг. 5B, расстояние между транспортным средством V1 и краем 61a границы 61 парковки равно нулю. Длина y2 обнаруженной границы 61 парковки короче, чем вся длина границы 61 парковки (короче, чем длина y1, показанная на фиг. 5A), поскольку транспортное средство V1 движется по границе 61 парковки. Поскольку длина y2 короче заранее определенного расстояния L11, транспортное средство V1 определяется как вторгнувшееся на незанятые места Q2 и Q3 парковки, разделенные границей 61 парковки. Незанятые места Q2 и Q3 парковки исключаются из доступных мест парковки или не устанавливаются как рекомендуемые места парковки.
[0038]
[Объяснение работы первого варианта осуществления]
Работа устройства помощи при парковке в соответствии с первым вариантом осуществления описана ниже со ссылкой на последовательность операций, показанную на фиг.6. Работа устройства помощи при парковке в соответствии с первым вариантом осуществления иллюстрируется в случае отображения вспомогательного изображения, указывающего рекомендуемое место парковки.
[0039]
Например, когда транспортное средство V1 въезжает на парковочную стоянку D1, включающую в себя множество мест парковки, как показано на фиг.2, блок 121 обнаружения незанятых мест парковки на этапе S11 обнаруживает границы 61 парковки на основе изображения сверху вокруг транспортного средства V1, сгенерированного посредством блока 11 генерирования периферийного изображения.
[0040]
На этапе S12 блок 121 обнаружения незанятых мест парковки задает незанятые места парковки.
[0041]
На этапе S13 блок 125 управления переключением отображения определяет, вторгается ли транспортное средство на незанятые места парковки вышеописанными способами. Другими словами, блок 125 управления переключением отображения определяет, перекрывается ли транспортное средство V1 с незанятыми местами парковки.
[0042]
Когда транспортное средство V1 перекрывается с незанятыми местами парковки, блок 125 управления переключением отображения исключает перекрывающиеся незанятые места парковки из доступных мест парковки на этапе S14. Как показано на фиг.5B, на местах Q11 и Q12 парковки, в которые вторгается транспортное средство V1, трудно парковаться. Кроме того, длина соответствующей границы 61 парковки равна предварительно определенному расстоянию L11 или меньше, что может привести к обработке некорректного связывания границы 61 парковки с шумом, сгенерированным в изображении, что приведет к неправильному распознаванию мест парковки. Таким образом, блок 125 управления переключением отображения избегает обнаружения незанятых мест парковки, в отношение которых определяется, что транспортное средство вторгается, в качестве доступных мест парковки, и запрещает отображение соответствующих незанятых мест парковки в качестве доступных мест парковки на блоке 3 отображения. Другие незанятые места парковки, за исключением незанятых мест парковки, в которые вторгается транспортное средство, соответственно распознаются как доступные места парковки.
[0043]
На этапе S15 блок 123 установки рекомендаций по парковке обнаруживает рекомендуемое место парковки среди доступных незанятых мест парковки. Как описано выше, модуль 123 установки рекомендаций по парковке устанавливает незанятое место парковки, определенное как наиболее простое для парковки, в качестве рекомендуемого места парковке, в соответствии с различными условиями, такими как более короткое время, необходимое для парковки, и более короткое расстояние для движения. Блок 123 установки рекомендаций по парковке может устанавливать рекомендуемое место парковки на основе любых других условий.
[0044]
На этапе S16 блок 124 генерирования вспомогательного изображения генерирует вспомогательные изображения, указывающие доступные незанятые места парковки, и вспомогательное изображение, указывающее рекомендуемое место парковки. Блок 14 компоновки изображения объединяет эти вспомогательные изображения с изображением сверху для отображения комбинированного изображения на блоке 3 отображения. Например, вспомогательные изображения 22, указывающие доступные незанятые места парковки, и вспомогательное изображение 21, указывающее рекомендуемое изображение парковки, отображаются на изображении сверху, как показано на фиг.2. Таким образом, пассажир транспортного средства V1 может визуально проверять соответствующие вспомогательные изображения 21 и 22, так чтобы распознавать позиции доступных незанятых мест парковки и рекомендуемое место парковки.
[0045]
На этапе S17 блок 124 генерирования вспомогательного изображения устанавливает целевую границу парковки для парковки и способ парковки. Когда пассажир, проверяющий изображение сверху, указывающее вспомогательные изображения 21 и 22, выбирает и исполняет операцию с интерфейсом 6 ввода, определяются целевая граница парковки и способ парковки, такой как парковка назад или парковка вперед.
[0046]
На этапе S18 блок 133 генерирования маршрута парковки подтверждает текущую позицию транспортного средства V1 и генерирует маршрут парковки на основе стартовой позиции парковки, установленной посредством блока 131 установки стартовой позиции парковки. Изображение, указывающее маршрут парковки, затем отображается на блоке 3 отображения. Например, как показано на фиг. 4B, маршруты L1 и L2 парковки отображаются так, что транспортное средство V1 следует, чтобы переместиться из текущей позиции p0, чтобы достичь стартовой позиции p1 парковки, и далее перейти в припаркованную позицию p3 на целевой границе 52 парковки через позицию р2 переключения.
[0047]
На этапе S19 начинается управление парковкой. Блок 41 управления углом поворота рулевого колеса и блок 42 управления скоростью выводят сигналы управления на исполнительный механизм 5, так что транспортное средство V1 двигается из текущей позиции p0 в стартовую позицию p1 парковки и далее двигается в позицию p2 переключения вдоль маршрута L1 парковки.
[0048]
На этапе S20 определяется, достигло ли транспортное средство позиции p2 переключения. Когда транспортное средство V1 достигает позицию p2 переключения, управление переключением коробки передач исполняется на этапе S21. В частности, коробка передач переключается с передней передачи на заднюю.
[0049]
На этапе S22 целевая граница 52 парковки снова подтверждается, так чтобы двигать задним ходом транспортное средство V1 вдоль маршрута L2 парковки. На этапе S23 определяется, достигло ли транспортное средство V1 позиции p3 парковки на целевой границе 52 парковки. Когда транспортное средство V1 достигает позиции p3 парковки, работа исполнительного механизма 5 прекращается для сохранения припаркованного состояния на этапе S24.
[0050]
Как описано выше, вспомогательное изображение 21 отображается, когда транспортное средство V1 въезжает на парковочную стоянку D1, и затем исполняется управление парковкой транспортного средства на целевой границе 52 парковки, как только это задается.
[0051]
Способ помощи при парковке в соответствии с первым вариантом осуществления настоящего изобретения, описанным выше, определяет, двигается ли транспортное средство V1 по границе 61 парковки (незанятые места парковки). Способ помощи при парковке затем исключает незанятые места парковки (Q2 и Q3, показанные на фиг.3), отделенные посредством границы 61 парковки, по которой движется транспортное средство V1, из других незанятых мест парковки, на которых должны отображаться вспомогательные изображения. А именно, когда транспортное средство V1 вторгается на незанятые места парковки, вспомогательные изображения не распределяются (предоставляются) по соответствующим незанятым местам парковки, отображаемым на блоке 3 отображения.
[0052]
Таким образом, можно предотвратить указание вспомогательных изображений на незанятых местах парковки, в которые вторгается транспортное средство V1. Когда транспортное средство V1 вторгается на незанятые места парковки, обнаруженная длина границы 61 парковки между соответствующими местами парковки укорачивается, что может препятствовать отображению вспомогательных изображений в соответствующих позициях для указания доступных незанятых мест парковки. Таким образом, способ помощи при парковке запрещает изображениям помощи быть указанными на незанятых местах парковки, в которые вторгается транспортное средство, так чтобы надлежащим образом отображать рекомендуемое место парковки. Когда транспортное средство V1 вторгается на незанятые места парковки, можно оценить позицию границы 61 парковки, чтобы сгенерировать условную линию, чтобы обнаружить доступные незанятые места парковки. В соответствии с настоящим вариантом осуществления, однако, запрещается указывать вспомогательные изображения на незанятых местах парковки, в которые вторгается транспортное средство, чтобы исключить необходимость генерирования такой условной линии, чтобы избежать некорректного связывания с другой условной линией, предотвращая неправильное обнаружение незанятых мест парковки. Таким образом, вспомогательные изображения могут отображаться в соответствующих позициях, когда транспортное средство V1 вторгается на незанятые места парковки.
[0053]
Способ помощи при парковке определяет, что транспортное средство V1 вторгается на незанятые места парковки, когда расстояние от транспортного средства V1 до края 61a границы 61 парковки равно нулю, а длина границы 61 парковки является заранее определенным расстоянием L11 (второе пороговое значение) или меньше, чтобы достигнуть обнаружения наличия транспортного средства V1 на границе 61 парковки с высокой точностью. Таким образом, способ помощи при парковке может осуществлять определение, должны ли вспомогательные изображения отображаться или запрещаться соответствующим образом, в зависимости от условий парковки.
[0054]
Описанный выше вариант осуществления проиллюстрирован на примере, в котором рекомендуемое место парковки выбирается посредством операции пассажира после того, как отображается вспомогательное изображение 21, указывающее рекомендуемое место парковки, чтобы переместить транспортное средство для парковки на выбранном рекомендуемом месте парковки посредством автономного вождения. Настоящее изобретение, однако, не ограничивается этим случаем, и транспортное средство может быть припарковано в рекомендованном месте парковки посредством автономного вождения в момент, когда определено рекомендуемое место парковки.
[0055]
Вышеупомянутый первый вариант осуществления определяет, является ли транспортное средство V1 вторгающимся на незанятые места парковки в соответствии с расстоянием от транспортного средства V1 до края 61a границы 61 парковки, и длину границы 61 парковки. Настоящее изобретение не предназначено для ограничения этим способом определения и может осуществлять определение того, является ли транспортное средство V1 вторгающимся на незанятые места парковки любым другим способом.
[0056]
Хотя вышеупомянутый первый вариант осуществления проиллюстрирован на примере, в котором граница 61 парковки, разделяющая два незанятых места парковки, представляет собой одиночную линию, граница парковки может иметь любой профиль. Первый вариант осуществления также может быть применен к случаю удвоенных границ 611 и 612 парковки, как показано, например, на фиг.7А. Когда транспортное средство V1 расположено на двух границах 611 и 612 парковки, оба незанятых места Q21 и Q22 парковки исключаются из доступных незанятых мест парковки. Когда транспортное средство расположено на одной границе 611 парковки, только незанятое место Q21 парковки исключается из доступных незанятых мест парковки.
[0057]
Настоящий вариант осуществления также применим к случаю, когда места парковки наклонены к направлению движения транспортного средства V1, как показано на фиг.7B, чтобы исключить незанятые места Q23 и Q24 парковки из доступных незанятых мест парковки, когда транспортное средство V1 вторгается в них.
[0058]
Вышеупомянутый первый вариант осуществления исключает незанятые места Q2 и Q3 парковки, в которые вторгается транспортное средство V1, как показано на фиг.3, из доступных незанятых мест парковки. Другие незанятые места Q1 и Q4 парковки, смежные с соответствующими незанятыми местами Q2 и Q3 парковки, могут быть дополнительно исключены из доступных незанятых мест парковки.
[0059]
Соответствующие границы 61 парковки, отделяющие незанятые места Q2 и Q3 парковки от соответствующих смежных незанятых мест Q1 и Q4 парковки, не скрыты посредством транспортного средства V1, но полностью на виду, и, таким образом, вероятность ошибочного обнаружения позиций незанятых мест парковки низка. Однако, поскольку незанятые места Q1 и Q4 парковки находятся рядом с соответствующими незанятыми местами Q2 и Q3 парковки, сложность в операции для парковки может быть увеличена. Таким образом, незанятые места Q1 и Q4 парковки также исключаются из доступных незанятых мест парковки или рекомендуемых мест парковки. Такое исключение может позволить отображать вспомогательные изображения на других незанятых местах парковки для более удобной парковки.
[0060]
[Объяснение второго варианта осуществления]
Второй вариант осуществления согласно настоящему изобретению описан ниже. Второй вариант осуществления определяет, доступны ли незанятые места парковки в соответствии с относительным взаимным расположением между транспортным средством V1 и соответствующими незанятыми местами парковки. Определение описано ниже со ссылкой на график, показанный на фиг. 8.
[0061]
Фиг.8 является графиком, показывающим расстояние X от транспортного средства V1 до края 61a границы 61 парковки (граничная линия) (расстояние между движущимся объектом и краем граничной линии между незанятыми местами парковки) на оси абсцисс, и показывающим пороговое значение длины Y границы 61 парковки (длина границы парковки между незанятыми местами парковки) на оси ординат. Когда соотношение между X и Y удовлетворяет условиям в области ниже кривой s1 (заштрихованная область), соответствующие незанятые места парковки не устанавливаются как доступные незанятые места парковки. Кривая s1 является первым пороговым значением.
Первое пороговое значение сравнивается с длиной границы парковки между незанятыми местами парковки, чтобы определить, следует ли отображать вспомогательные изображения в зависимости от результата сравнения. Вспомогательные изображения, указывающие доступные места парковки, рекомендуемое место парковки и целевую границу парковки, запрещены к указанию на незанятых местах парковки, в которых длина границы парковки равна первому пороговому значению или меньше. Эта конкретная обработка описана ниже.
[0062]
Как показано на фиг.8, когда расстояние X равно нулю (в метрах), пороговое значение длины Y границы 61 парковки устанавливается равным y12 (например, 3 метра). Когда расстояние X от транспортного средства V1 до края 61a границы 61 парковки равно x11, пороговое значение длины Y устанавливается равным y11 (например, 1,5 метра). Когда расстояние X находится в диапазоне от нуля до x11, пороговое значение длины Y устанавливается так, чтобы непрерывно изменяться в рамках диапазона от y12 до y11.
[0063]
Например, граница 61 парковки, когда она имеет длину y12 (например, 3 метра) или более, имеет меньшую вероятность воздействия шума изображения, что приводит к неправильному обнаружению, даже если расстояние X равно нулю. Этот случай определяется для указания точных мест парковки, чтобы не исключать соответствующие незанятые места парковки из доступных незанятых мест парковки. А именно, транспортное средство V1 определяется как не движущееся по границе 61 парковки. Когда длина границы 61 парковки меньше, чем у12 (когда ниже кривой s1), транспортное средство V1 определяется как движущееся по границе 61 парковки.
[0064]
Когда длина Y границы 61 парковки меньше, чем y11 (когда ниже кривой s1), вероятность того, что транспортное средство V1 движется по границе 61 парковки, высока независимо от расстояния X от транспортного средства V1 до края 61a, включая случай, когда расстояние от транспортного средства V1 до края 61а больше нуля. Другими словами, вероятность частичного пропуска обнаружения границы 61 парковки высока между транспортным средством V1 и краем 61a. В этом случае незанятые места парковки, разделенные посредством соответствующей границы 61 парковки, не устанавливаются как доступные незанятые места парковки.
[0065]
Способ помощи при парковке в соответствии со вторым вариантом осуществления, описанным выше, определяет, должны ли незанятые места парковки быть установлены как доступные незанятые места парковки, в зависимости от относительного взаимного расположения между транспортным средством V1 и границей 61 парковки. Это позволяет более точно обнаруживать свободные незанятые места парковки, чтобы указывать незанятые места парковки более легкие для паркования в качестве рекомендуемого места парковки.
[0066]
Кроме того, незанятые места парковки при имеющимся расстоянии предварительно определенного первого порогового значения или меньше от транспортного средства, запрещены к указанию в качестве доступных мест парковки, рекомендуемых мест парковки или целевой границы парковки, чтобы указывать только соответствующую незанятое место парковки соответственно.
[0067]
[Объяснение третьего варианта осуществления]
Третий вариант осуществления согласно настоящему изобретению описан ниже со ссылкой на фиг. 9. Конфигурация устройства отличается от показанной на Фиг. 1 при обработке посредством блока 124 генерирования вспомогательного изображения. Блок 124 генерирования вспомогательного изображения в соответствии с третьим вариантом осуществления генерирует, в дополнение к вспомогательному изображению 21, указывающему рекомендуемое место парковки, маркер 23 доступности парковки, указывающий, что на парковочной стоянке D1 есть незанятые места парковки, и выводит изображение на блок управления переключением отображения.
[0068]
Когда транспортное средство V1 въезжает, чтобы двигаться вперед на парковке D1, в то время как незанятые места парковки обнаружены, маркер 23 доступности парковки отображается в заранее определенной позиции на изображении сверху (позиция, отличная от незанятых мест Q1–Q12 парковки), как показано на Фиг.9. Когда транспортное средство V1 затем делает остановку, указание переключается так, чтобы отображать вспомогательное изображение 21 в отношении рекомендованного места парковки среди обнаруженных незанятых мест парковки, как показано на Фиг.2. Используемое здесь выражение «транспортное средство делает остановку» относится к состоянию, в котором скорость равна нулю километров в час или заранее определенному пороговому значению или ниже. Другие конфигурации такие же, какие показаны на Фиг. 1 и конкретные пояснения не повторяются ниже.
[0069]
[Объяснение работы третьего варианта осуществления]
Работа устройства помощи при парковке в соответствии с третьим вариантом осуществления описана ниже со ссылкой на последовательность операций, показанной на фиг. 10. Когда транспортное средство V1 въезжает на парковочную стоянку D1, включающую в себя множество мест парковки, блок 121 обнаружения незанятых мест парковки на этапе S31 обнаруживает границы 61 парковки на основе изображения сверху вокруг транспортного средства V1, сгенерированного посредством блока 11 генерирования периферийного изображения.
[0070]
На этапе S32 блок 121 обнаружения незанятых мест парковки задает незанятые места парковки.
[0071]
На этапе S33 блок 125 управления переключением отображения определяет, двигается или останавливается транспортное средство V1 в соответствии с результатом обнаружения датчика 8 скорости колеса.
[0072]
Когда транспортное средство V1 двигается, маркер 23 доступности парковки, указывающий наличие или отсутствие незанятых мест парковки, отображается на изображении сверху на этапе S34, как показано на фиг. 9. Маркер 23 доступности парковки отображается в позиции, не перекрывающейся с незанятыми местами парковки, включенными в изображение сверху. Маркер 23 доступности для парковки отображается в цвете, когда на парковочной стоянке D1 имеется, по меньшей мере, одно незанятое место парковки и отображается в черно–белом режиме, когда нет незанятых мест парковки. Таким образом, пассажир может распознавать наличие или отсутствие незанятых мест парковки в зависимости от отображаемого режима маркера 23 доступности парковки. Цвет маркера 23 доступности парковки может варьироваться в зависимости от наличия или отсутствия незанятых мест парковки.
Когда транспортное средство V1 останавливается, блок 125 управления переключением отображения определяет, вторгается ли транспортное средство V1 на незанятые места парковки.
[0073]
Процесс от этапа S35 до этапа S46 является таким же, как и процесс от этапа S13 до этапа S24, показанного на фиг.6, и перекрывающиеся пояснения не повторяются ниже. Что касается этапа S38, вспомогательные изображения отображаются вместо маркера 23 доступности парковки, который не отображается, когда транспортное средство V1 останавливается.
[0074]
Способ помощи при парковке в соответствии с третьим вариантом осуществления, описанным выше, отображает маркер 23 доступности парковки в соответствующей позиции (в позиции, не перекрывающейся с незанятыми местами парковки), когда транспортное средство V1, въезжающее на парковочную стоянку D1, двигается, чтобы обнаружить незанятые места парковки. Таким образом, пассажир может распознать наличие или отсутствие незанятых мест парковки на парковочной стоянке D1.
[0075]
Когда транспортное средство V1 делает остановку, вспомогательные изображения 21 и 22, как показано на фиг. 2, отображаются вместо маркера 23 доступности парковки. Как и в случае первого варианта осуществления, описанного выше, можно предотвратить указание незанятых мест парковки, в которых трудно припарковать транспортное средство V1, в качестве доступных незанятых мест парковки или рекомендуемого места парковки. Третий вариант осуществления также может избежать проблемы обнаружения границы 61 парковки, имеющей более короткую длину, чем другие, из–за того, что транспортное средство V1, движущееся по соответствующей границе 61 парковки, некорректного связывания с другой условной линией из–за влияния шума изображения, чтобы не обнаруживать неправильные незанятые места парковки, в качестве доступных незанятых мест парковки. Доступные места парковки, рекомендуемое место парковки и целевая граница парковки могут отображаться с высокой точностью независимо от того, вторгается ли транспортное средство V1 на незанятые места парковки.
[0076]
Соответствующие варианты осуществления, описанные выше, были проиллюстрированы в случае, когда изображение сверху используется в качестве периферийного изображения, но может использоваться изображение с высоты птичьего полета, которое представляет собой изображение, видимое с визуальной точки под наклоном к транспортному средству, вместо изображения сверху. Периферийное изображение может быть изображением с высоты птичьего полета, которое указывает на периферию транспортного средства, если смотреть сверху, кроме изображения сверху. В таком случае можно использовать трехмерное изображение транспортного средства, указывающее транспортное средство с визуальной точки, если смотреть под углом сверху, и трехмерные вспомогательные изображения, указывающие места парковки с визуальной точки, если смотреть под углом выше. Чтобы отобразить трехмерные вспомогательные изображения, сохраняются трехмерные данные на вспомогательных изображениях, чтобы генерировать вспомогательные изображения на основе трехмерных данных в соответствии с визуальной точкой (оба двумерные данных). Периферийное изображение, используемое в соответствующих вариантах осуществления, не обязательно захватывается посредством камер, смонтированных на транспортном средстве, и может захватываться камерами, установленными вокруг мест парковки.
[0077]
Соответствующие варианты осуществления могут быть применены к другим движущимся объектам, отличным от автомобиля, и конкретные примеры движущихся объектов включают в себя промышленное транспортное средство (такое как грузовик), самолет, летательный аппарат, подводный движущийся объект (такой как подводный зонд и подводная лодка), перевернутый маятниковый механизм и робот–пылесос. Процесс парковки в соответствии с вышеупомянутыми вариантами осуществления применим к самолету, летательному аппарату или подводному движущемуся объекту при движении на незанятое место, чтобы сделать остановку так, чтобы незанятое место, в котором легче было остановиться, выбиралось из множества незанятых мест, чтобы определить рекомендуемое место для отображения вспомогательного изображения с указанием определенного рекомендуемого места.
[0078]
Процесс парковки также применим к перевернутому маятниковому механизму или пылесосу–роботу при движении на незанятое место (включая зарядное место), чтобы сделать остановку так, что генерируется вспомогательное изображение, указывающее рекомендуемое место, чтобы отобразить его пассажиру или оператору.
Устройство отображения в соответствии с вариантами осуществления для указания вспомогательных изображений и периферийного изображения пассажиру не обязательно смонтировано на транспортном средстве (движущемся объекте) и может быть любым устройством, которое отображает изображения, например, мобильным телефоном или интеллектуальным устройством.
[0079]
Хотя настоящее изобретение было описано выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не предназначено для ограничения описаниями и чертежами, составляющими часть этого раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники в соответствии с этим раскрытием.
СПИСОК ССЫЛОЧНЫХ ЗНАКОВ
[0080]
1 КОНТРОЛЛЕР
2a, 2b, 2c, 2d КАМЕРА
3 БЛОК ОТОБРАЖЕНИЯ
4 ECU УПРАВЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА
5 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
6 ИНТЕРФЕЙС ВВОДА
7 ДАТЧИК УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА
8 ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ КОЛЕСА
9 ДАТЧИК ПРОСТРАНСТВЕННОЙ ПЕРСПЕКТИВЫ
11 СХЕМА ГЕНЕРИРОВАНИЯ ПЕРИФЕРИЧЕСКОГО ИЗОБРАЖЕНИЯ
12 СХЕМА УСТАНОВКИ ЦЕЛЕВОГО МЕСТА ПАРКОВКИ
13 СХЕМА УПРАВЛЕНИЯ ПОМОЩЬЮ ПРИ ПАРКОВКЕ
14 БЛОК КОМПОНОВКИ ИЗОБРАЖЕНИЯ
21, 22 ВСПОМОГАТЕЛЬНОЕ ИЗОБРАЖЕНИЕ
23 МАРКЕР ДОСТУПНОСТИ ПАРКОВКИ
41 БЛОК УПРАВЛЕНИЯ УГЛОМ ПОВОРОТА РУЛЕВОГО КОЛЕСА
42 БЛОК УПРАВЛЕНИЯ СКОРОСТЬЮ
52 ЦЕЛЕВАЯ ГРАНИЦА ПАРКОВКИ
61 ГРАНИЦА ПАРКОВКИ
61а КРАЙ
121 БЛОК ОБНАРУЖЕНИЯ НЕЗАНЯТОГО МЕСТА ПАРКОВКИ
123 БЛОК УСТАНОВКИ РЕКОМЕНДУЕМОГО МЕСТА ПАРКОВКИ
124 БЛОК ГЕНЕРИРОВАНИЯ ВСПОМОГАТЕЛЬНОГО ИЗОБРАЖЕНИЯ
125 БЛОК УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ОТОБРАЖЕНИЯ.
Реферат
Изобретение относится к способу и устройству помощи при парковке транспортного средства. Способ помощи при парковке для генерирования периферийного изображения, указывающего периферию движущегося объекта, в качестве просматриваемого сверху, обнаружения незанятого места парковки вокруг движущегося объекта и отображения на периферийном изображении вспомогательного изображения, указывающего, что обнаруженное незанятое место парковки является доступным местом парковки. Способ содержит определение, вторгается ли движущийся объект на незанятое место парковки, и запрещение отображения вспомогательного изображения на незанятом месте парковки, в отношении которого определено, что движущийся объект вторгается, в периферийном изображении. Достигается повышение безопасности управления транспортным средством. 2 н. и 6 з.п. ф-лы. 13 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство и способ содействия парковке
Комментарии