Варианты управления работой автономного транспортного средства - RU2744640C1
Код документа: RU2744640C1
Чертежи







Описание
Область техники
[0001] Это раскрытие относится к управлению автономным транспортным средством и автономному вождению.
Уровень техники
[0002] Транспортное средство, такое как автономное транспортное средство, может проезжать по части транспортной сети транспортных средств. Проезд по части транспортной сети транспортных средств может включать в себя генерирование или захват, например, датчиком транспортного средства, данных, таких как данные, представляющие оперативную окружающую обстановку транспортного средства, или часть их. Соответственно, система, способ и устройство для управления работой автономного транспортного средства могут быть выгодными.
Сущность изобретения
[0003] Здесь раскрыты аспекты, признаки, элементы, реализации и варианты осуществления управления работой автономного транспортного средства.
[0004] Аспектом раскрытых вариантов осуществления является способ использования при проезде по транспортной сети транспортных средств автономного транспортного средства. Проезд по транспортной сети транспортных средств включает в себя приведение в действие экземпляра модуля оценки управления работой для конкретного варианта, при этом экземпляр модуля оценки управления работой для конкретного варианта включает в себя экземпляр модели оценки управления работой для конкретного варианта для варианта работы транспортного средства, причем вариант работы транспортного средства является вариантом работы транспортного средства при слиянии или вариантом работы транспортного средства при обходе препятствия, прием действия-кандидата управления транспортным средством от экземпляра модуля оценки управления работой для конкретного варианта и проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством.
[0005] Другим аспектом раскрытых вариантов осуществления является автономное транспортное средство, включающее в себя процессор, сконфигурированный для выполнения инструкций, хранящихся на невременном считываемом компьютером носителе, для приведения в действие экземпляра модуля оценки управления работой для конкретного варианта, причем экземпляр модуля оценки управления работой для конкретного варианта включает в себя экземпляр модели оценки управления работой для конкретного варианта для варианта работы транспортного средства, причем вариант работы транспортного средства является вариантом работы транспортного средства при слиянии или вариантом работы транспортного средства при обходе препятствия, приема действия-кандидата управления транспортным средством от экземпляра модуля оценки управления работой для конкретного варианта и проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством.
[0006] Другим аспектом раскрытых вариантов осуществления является способ использования при проезде по транспортной сети транспортных средств автономного транспортного средства. Способ включает в себя приведение в действие блоков контроля оперативной окружающей обстановки для идентификации варианта работы транспортного средства. Блоки контроля оперативной окружающей обстановки включают в себя блок контроля оперативной окружающей обстановки при слиянии и, в ответ на определение, выполненное блоком контроля оперативной окружающей обстановки при слиянии, что первая полоса движения в транспортной сети транспортных средств и вторая полоса движения транспортной сети транспортных средств сливаются (объединяются) для формирования последующей объединенной полосы движения вдоль ожидаемого пути для автономного транспортного средства, приведение в действие блока контроля оперативной окружающей обстановки включает в себя идентификацию варианта работы транспортного средства при слиянии в качестве варианта работы транспортного средства. Блоки контроля оперативной окружающей обстановки включают в себя блок контроля оперативной окружающей обстановки при обходе препятствия и в ответ на определение блоком контроля оперативной окружающей обстановки при обходе препятствия, что ожидаемый путь для автономного транспортного средства включает в себя препятствие впереди, транспортная сеть транспортных средств не включает в себя доступную смежную полосу движения, и транспортная сеть транспортных средств включает в себя смежную встречную полосу движения, приведение в действие блока контроля оперативной окружающей обстановки включает в себя идентификацию варианта работы транспортного средства при обходе препятствия, в качестве варианта работы транспортного средства. Способ включает в себя в ответ на прием от блока контроля оперативной окружающей обстановки информации оперативной окружающей обстановки, идентифицирующей вариант работы транспортного средства, инстанцирование (создание) экземпляра модуля оценки управления работой для конкретного варианта, причем экземпляр модуля оценки управления работой для конкретного варианта включает в себя экземпляр модели оценки управления работой для конкретного варианта для варианта работы транспортного средства. В ответ на определение того, что вариант работы транспортного средства является вариантом работы транспортного средства при слиянии, инстанцирование экземпляра модуля оценки управления работой для конкретного варианта включает в себя инстанцирование экземпляра модуля оценки управления работой для конкретного варианта-слияния. В ответ на определение того, что вариант работы транспортного средства является вариантом работы транспортного средства при обходе препятствия, инстанцирование экземпляра модуля оценки управления работой для конкретного варианта включает в себя инстанцирование экземпляра модуля оценки управления работой для конкретного варианта-обхода препятствия. Способ включает в себя прием действия-кандидата управления транспортным средством от экземпляра модуля оценки управления работой для конкретного варианта и проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством. Проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством включает, в ответ на определение, что вариант работы транспортного средства является вариантом работы транспортного средства при слиянии, проезд из текущей полосы движения в транспортной сети транспортных средств в последующую объединенную полосу движения, и в ответ на определение того, что вариант работы транспортного средства является вариантом работы транспортного средства при обходе препятствия, проезд по первой части текущей полосы движения после проезда по первой части текущей полосы движения, проезд по первой части встречной полосы движения, и после проезда по первой части встречной полосы движения, проезд по второй части текущей полосы движения.
[0007] Вариации этих и других аспектов, признаков, элементов, реализаций и вариантов осуществления способов, устройств, процедур и алгоритмов, раскрытых в данном документе, описаны более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Различные аспекты способов и устройств, раскрытых в данном документе, станут более очевидными при обращении к примерам, представленным в следующем описании и чертежах, на которых:
[0009] Фиг. 1 является блок-схемой примера транспортного средства, в котором могут быть реализованы раскрытые здесь аспекты, признаки и элементы;
[0010] Фиг. 2 является схемой примера части системы транспортировки и связи транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы;
[0011] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием;
[0012] Фиг. 4 является блок-схемой примера системы управления работой автономного транспортного средства в соответствии с вариантами осуществления этого раскрытия;
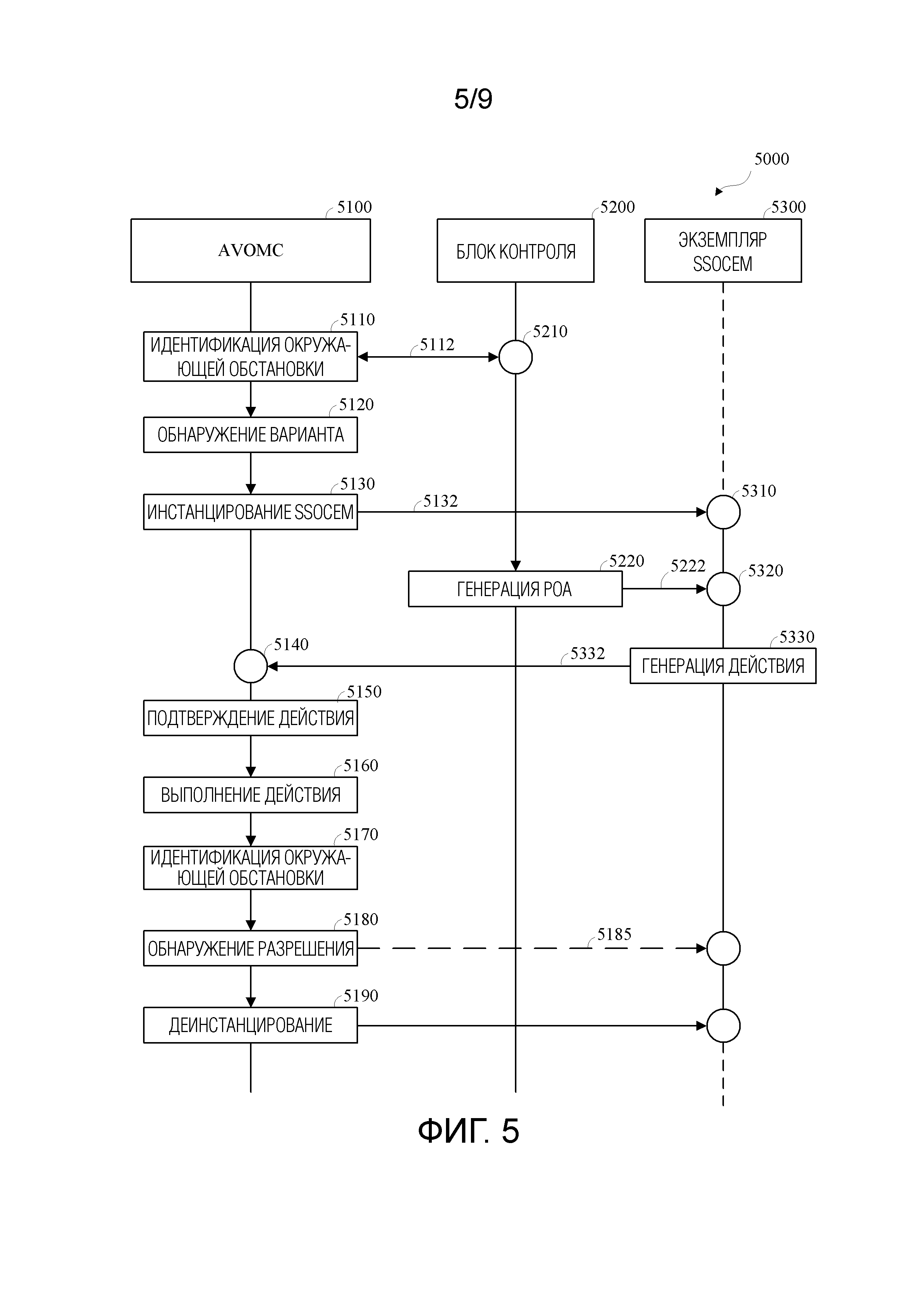
[0013] Фиг. 5 является блок-схемой последовательности операций примера управления работой автономного транспортного средства в соответствии с вариантами осуществления этого раскрытия;
[0014] Фиг. 6 является схемой примера сцены слияния в соответствии с вариантами осуществления этого раскрытия;
[0015] Фиг. 7 является схемой другого примера сцены слияния в соответствии с вариантами осуществления этого раскрытия;
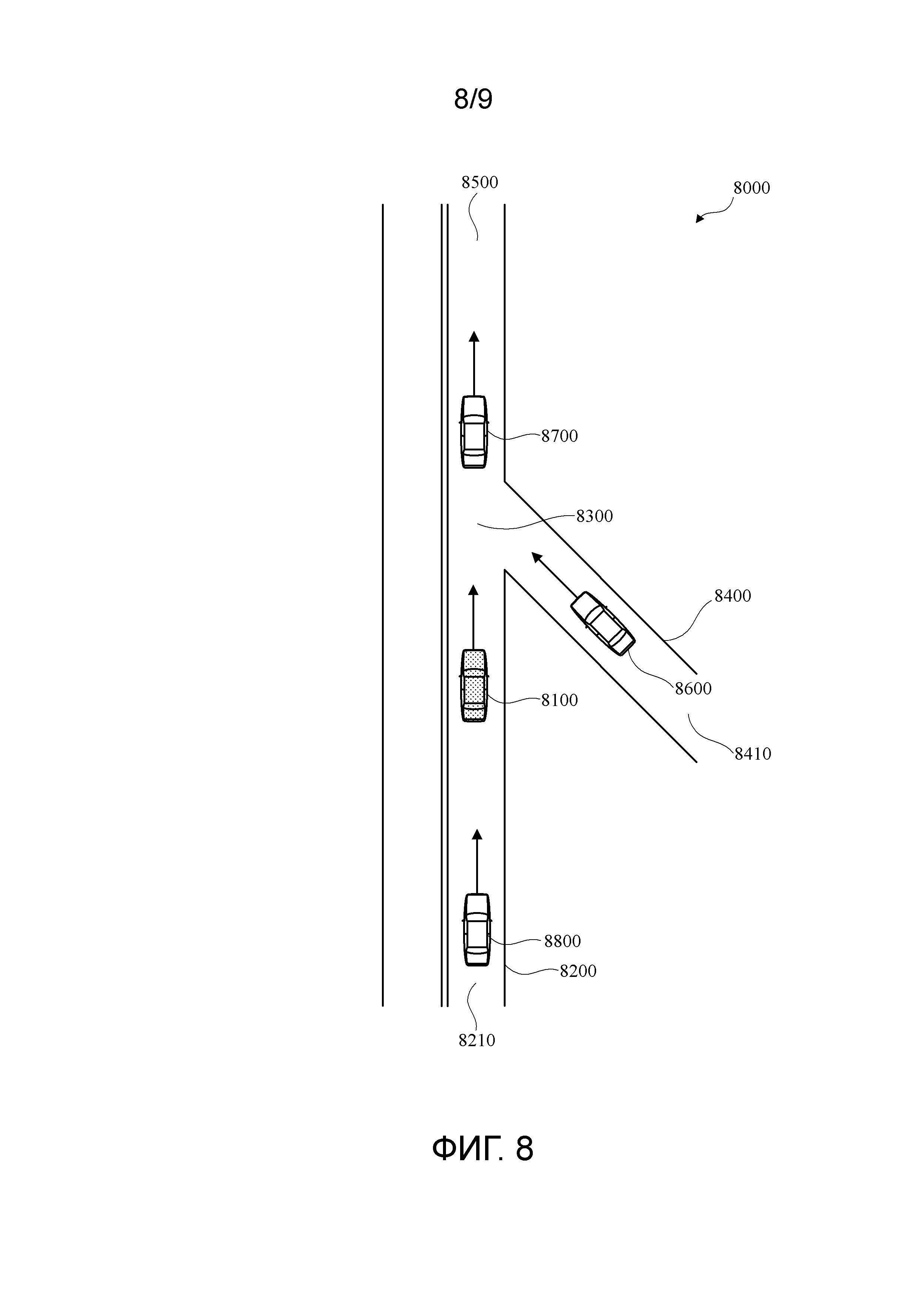
[0016] Фиг. 8 является схемой другого примера сцены слияния в соответствии с вариантами осуществления этого раскрытия; и
[0017] Фиг. 9 является схемой примера сцены обхода препятствия в соответствии с вариантами осуществления этого раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Транспортное средство, такое как автономное транспортное средство или полуавтономное транспортное средство, может проезжать по части транспортной сети транспортных средств. Транспортное средство может включать в себя один или более датчиков, и проезд по транспортной сети транспортных средств может включать в себя датчики, генерирующие или собирающие данные датчиков, такие как данные, соответствующие оперативной окружающей обстановки транспортного средства, или их часть. Например, данные датчика могут включать в себя информацию, соответствующую одному или более внешним объектам, таким как пешеходы, удаленные транспортные средства, другие объекты в оперативной окружающей обстановке транспортного средства, геометрию транспортной сети транспортных средств или их комбинацию.
[0019] Автономное транспортное средство может включать в себя систему управления работой автономного транспортного средства, которая может включать в себя один или более блоков контроля оперативной окружающей обстановки, которые могут обрабатывать информацию оперативной окружающей обстановки, такую как данные датчика, для автономного транспортного средства. Блоки контроля оперативной окружающей обстановки могут включать в себя блок контроля блокировки, который может определять вероятность информации о доступности для частей транспортной сети транспортных средств, пространственно приближенных к автономному транспортному средству.
[0020] Система управления работой автономного транспортного средства может включать в себя контроллер управления работой автономного транспортного средства, который может обнаруживать один или более вариантов работы, таких как варианты при пешеходе, варианты при пересечении, варианты при смене полосы движения или любой другой вариант работы транспортного средства или комбинацию вариантов работы транспортного средства, соответствующих внешним объектам.
[0021] Система управления работой автономного транспортного средства может включать в себя один или более модулей оценки управления работой для конкретного варианта. Каждый модуль оценки управления работой для конкретного варианта может быть моделью, такой как модель частично наблюдаемого процесса принятия решений Маркова (POMDP), соответствующего варианта работы. Контроллер управления работой автономного транспортного средства может инстанцировать соответствующие экземпляры модулей оценки управления работой для конкретного варианта в ответ на обнаружение соответствующих вариантов работы.
[0022] Контроллер управления работой автономного транспортного средства может принимать возможные действия-кандидаты управления транспортным средством от соответствующих инстанцированных экземпляров модуля оценки управления работой для конкретного варианта, может идентифицировать действие управления транспортным средством из действий-кандидатов управления транспортным средством и может управлять автономным транспортным средством для проезда по части транспортной сети транспортных средств в соответствии с идентифицированным действием управления транспортным средством.
[0023] Хотя описано здесь со ссылкой на автономное транспортное средство, описанные здесь способы и устройства могут быть реализованы в любом транспортном средстве, способном к автономной или полуавтономной работе. Хотя описано со ссылкой на транспортную сеть транспортных средств, способ и устройство, описанные в данном документе, могут включать в себя автономное транспортное средство, работающее в любой пригодной для навигации транспортного средства области.
[0024] Фиг. 1 является схемой примера транспортного средства, в котором могут быть реализованы аспекты, признаки и элементы, раскрытые в данном документе. Как показано, транспортное средство 1000 включает в себя шасси 1100, силовой агрегат 1200, контроллер 1300 и колеса 1400. Хотя транспортное средство 1000 показано как включающее в себя четыре колеса 1400 для простоты, может использоваться любое другое движительное устройство или устройства, такие как винт или гусеницы. На фиг. 1, элементы, соединяющие линии, такие как силовой агрегат 1200, контроллер 1300 и колеса 1400, указывают, что информация, такая как данные или сигналы управления, мощность, такая как электрическая мощность или крутящий момент, или информация и мощность, может быть сообщается между соответствующими элементами. Например, контроллер 1300 может принимать мощность от силового агрегата 1200 и может связываться с силовым агрегатом 1200, колесами 1400 или обоими для управления транспортным средством 1000, которое может включать в себя ускорение, замедление, рулевое управление или иное управление транспортным средством 1000.
[0025] Как показано, силовой агрегат 1200 включает в себя источник 1210 мощности, трансмиссию 1220, блок 1230 рулевого управления и исполнительный механизм 1240. Могут быть включены другие элементы или комбинации элементов силового агрегата, такие как подвеска, приводной вал, оси или выхлопная система. Хотя показано отдельно, колеса 1400 могут быть включены в силовой агрегат 1200.
[0026] Источник 1210 мощности может включать в себя двигатель, аккумуляторную батарею или их комбинацию. Источником 1210 мощности может быть любое устройство или комбинация устройств, работающих для обеспечения энергии, например, электрической энергии, тепловой энергии или кинетической энергии. Например, источник 1210 мощности может включать в себя двигатель, такой как двигатель внутреннего сгорания, электродвигатель или комбинацию двигателя внутреннего сгорания и электродвигателя, и может обеспечивать подачу кинетической энергии в качестве движущей силы на одно или более колес 1400. Источник 1210 мощности может включать в себя блок потенциальной энергии, такой как одна или более аккумуляторных батарей из сухих элементов, таких как никель-кадмиевые (NiCd), никель-цинковые (NiZn), никель-металлогидридные (NiMH), литий-ионные (Li-ионные), солнечных батарей, топливных элементов или любое другое устройство, способное обеспечить энергию.
[0027] Трансмиссия 1220 может принимать энергию, такую как кинетическая энергия, от источника 1210 мощности и может передавать энергию на колеса 1400, чтобы обеспечить движущую силу. Трансмиссия 1220 может управляться контроллером 1300, исполнительным механизмом 1240 или обоими. Блок 1230 рулевого управления может управляться контроллером 1300, исполнительным механизмом 1240 или обоими, и может управлять колесами 1400 для управления транспортным средством. Исполнительный механизм 1240 может принимать сигналы от контроллера 1300 и может приводить в действие или управлять источником 1210 мощности, трансмиссией 1220, блоком 1230 рулевого управления или любой их комбинацией для управления транспортным средством 1000.
[0028] Как показано, контроллер 1300 может включать в себя блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любую их комбинацию. Хотя показано как единый блок, любой один или более элементов контроллера 1300 могут быть интегрированы в любое количество отдельных физических блоков. Например, пользовательский интерфейс 1350 и процессор 1330 могут быть интегрированы в первый физический блок, а память 1340 может быть интегрирована во второй физический блок. Хотя это не показано на фиг. 1 контроллер 1300 может включать в себя источник питания, такой как аккумуляторная батарея. Хотя это показано как отдельные элементы, блок 1310 определения местоположения, блок 1320 электронной связи, процессор 1330, память 1340, пользовательский интерфейс 1350, датчик 1360, интерфейс 1370 электронной связи или любая их комбинация могут быть объединены в одном или более электронных блоков, схем или микросхем.
[0029] Процессор 1330 может включать в себя любое устройство или комбинацию устройств, способных манипулировать или обрабатывать сигнал или другую информацию, существующее или разработанное в будущем, включая оптические процессоры, квантовые процессоры, молекулярные процессоры или их комбинацию. Например, процессор 1330 может включать в себя один или более процессоров специального назначения, один или более процессоров цифровых сигналов, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, одну или более интегральных схем, одну или более специализированных интегральных схем (ASIC) одну или более программируемых вентильных матриц (FPGA), одну или более программируемых логических матриц, один или более программируемых логических контроллеров, один или более конечных автоматов или любую их комбинацию. Процессор 1330 может быть оперативно связан с блоком 1310 определения местоположения, памятью 1340, интерфейсом 1370 электронной связи, блоком 1320 электронной связи, пользовательским интерфейсом 1350, датчиком 1360, силовым агрегатом 1200 или любой их комбинацией. Например, процессор может быть оперативно связан с памятью 1340 через коммуникационную шину 1380.
[0030] Память 1340 может включать в себя любой материальный невременный используемый компьютером или считываемый компьютером носитель, способный, например, содержать, хранить, передавать или транспортировать машиночитаемые инструкции или любую информацию, связанную с ними, для использования в или в соединении с процессором 1330. Память 1340 может быть, например, одним или более твердотельными накопителями, одной или более картами памяти, одним или более съемными носителями, одним или более постоянными запоминающими устройствами, одной или более оперативными запоминающими устройствами, одним или более дисками, включая жесткий диск, дискету, оптический диск, магнитную или оптическую карту, или любым другим типом временного носителя, подходящим для хранения электронной информации, или любой их комбинацией.
[0031] Интерфейс 1370 связи может представлять собой беспроводную антенну, как показано, порт проводной связи, порт оптической связи или любой другой проводной или беспроводной блок, способный взаимодействовать со средой 1500 проводной или беспроводной электронной связи. Хотя фиг. 1 показывает интерфейс 1370 связи, осуществляющий связь через одну линию связи, интерфейс связи может быть сконфигурирован для связи через множество линий связи. Хотя фиг. 1 показывает один интерфейс 1370 связи, транспортное средство может включать в себя любое количество интерфейсов связи.
[0032] Блок 1320 связи может быть выполнен с возможностью передачи или приема сигналов через среду 1500 проводной или беспроводной электронной связи, например, через интерфейс 1370 связи. Хотя это явно не показано на фиг. 1, модуль 1320 связи может быть сконфигурирован для передачи, приема или и того и другого через любую среду проводной или беспроводной связи, такую как радиочастота (RF), ультрафиолет (UV), видимый свет, оптоволокно, проводная связь или их комбинацию. Хотя фиг. 1 показывает один блок 1320 связи и один интерфейс 1370 связи, может использоваться любое количество блоков связи и любое количество интерфейсов связи. В некоторых вариантах осуществления блок 1320 связи может включать в себя выделенный блок связи ближнего радиуса действия (DSRC), бортовой блок (OBU) или их комбинацию.
[0033] Блок 1310 определения местоположения может определять информацию геолокации, такую как долгота, широта, высота, направление движения или скорость, транспортного средства 1000. Например, модуль определения местоположения может включать в себя модуль глобальной системы определения местоположения (GPS), такой как блок, работающий по протоколу Национальной ассоциации морской электроники (NMEA) с поддержкой широкозонной усиливающей системы (WAAS), модуль радиотриангуляции или их комбинацию. Блок 1310 определения местоположения может использоваться для получения информации, которая представляет, например, текущий курс транспортного средства 1000, текущее местоположение транспортного средства 1000 в двух или трех измерениях, текущую угловую ориентацию транспортного средства 1000 или их комбинацию.
[0034] Пользовательский интерфейс 1350 может включать в себя любое устройство, способное взаимодействовать с человеком, такое как виртуальная или физическая клавиатура, сенсорная панель, дисплей, сенсорный дисплей, экранный дисплей, виртуальный дисплей, дисплей дополненной реальности, тактильный дисплей, устройство слежения за признаками, такое как устройство слежения за глазами, динамик, микрофон, видеокамеру, датчик, принтер или любую их комбинацию. Пользовательский интерфейс 1350 может быть оперативно связан с процессором 1330, как показано, или с любым другим элементом контроллера 1300. Хотя пользовательский интерфейс 1350 показан как один блок, он может включать в себя один или более физических блоков. Например, пользовательский интерфейс 1350 может включать в себя аудиоинтерфейс для выполнения аудиосвязи с человеком и сенсорный дисплей для выполнения визуальной и сенсорной связи с человеком. Пользовательский интерфейс 1350 может включать в себя несколько дисплеев, таких как несколько физически отдельных блоков, несколько определенных частей в одном физическом блоке или их комбинацию.
[0035] Датчик 1360 может включать в себя один или более датчиков, таких как массив датчиков, которые могут быть использованы для предоставления информации, которая может использоваться для управления транспортным средством. Датчики 1360 могут предоставлять информацию относительно текущих рабочих характеристик транспортного средства 1000. Датчик 1360 может включать в себя, например, датчик скорости, датчики ускорения, датчик угла поворота рулевого колеса, датчики тяги, датчики торможения, датчики положения рулевого колеса, датчики отслеживания глаз, датчики положения сиденья или любой датчик или комбинацию датчиков, способных сообщать информацию, касающуюся некоторого аспекта текущей динамической ситуации транспортного средства 1000.
[0036] Датчик 1360 может включать в себя один или более датчиков, действующих для получения информации, касающейся физической окружающей обстановки, окружающей транспортное средство 1000. Например, один или более датчиков могут определять геометрию и характеристики дороги, такие как линии полосы движения, и препятствия, такие как фиксированные препятствия, транспортные средства и пешеходы. Датчик 1360 может представлять собой или включать в себя одну или более видеокамер, лазерные системы обнаружения, инфракрасные системы обнаружения, акустические системы обнаружения или любой другой подходящий тип установленного на транспортном средстве устройства обнаружения окружающей обстановки или комбинацию устройств, известных в настоящее время или разработанных позже. В некоторых вариантах осуществления датчики 1360 и блок 1310 определения местоположения могут быть комбинированным блоком.
[0037] Хотя это не показано отдельно, транспортное средство 1000 может включать в себя контроллер траектории. Например, контроллер 1300 может включать в себя контроллер траектории. Контроллер траектории может быть выполнен с возможностью получения информации, описывающей текущее состояние транспортного средства 1000 и маршрут, запланированный для транспортного средства 1000, и на основе этой информации определять и оптимизировать траекторию для транспортного средства 1000. В некоторых вариантах осуществления контроллер траектории может выводить сигналы, действующие для управления транспортным средством 1000, так что транспортное средство 1000 следует траектории, которая определяется контроллером траектории. Например, выходной сигнал контроллера траектории может быть оптимизированной траекторией, которая может подаваться на силовую установку 1200, колеса 1400 или на то и другое. В некоторых вариантах осуществления оптимизированная траектория может быть управляющими входными данными, такими как набор углов поворота, причем каждый угол поворота соответствует моменту времени или местоположению. В некоторых вариантах оптимизированной траекторией может быть один или более путей, линий, кривых или их комбинация.
[0038] Одно или более колес 1400 могут быть управляемым колесом, которое может поворачиваться на угол поворота под управлением блока 1230 рулевого управления, приводным колесом, которое может вращаться для приведения в движение транспортного средства 1000 под управлением трансмиссии 1220, или управляемым и приводным колесом, которое может управлять и приводить в движение транспортное средство 1000.
[0039] Хотя это не показано на фиг. 1, транспортное средство может включать в себя блоки или элементы, не показанные на фиг. 1, такие как акустический экран, модуль Bluetooth®, радиомодули с частотной модуляцией (FM), модуль радиосвязи ближнего радиуса действия (NFC), жидкокристаллический (LCD) блок отображения, блок отображения на органических светодиодах (OLED), динамик или любая их комбинация.
[0040] Транспортное средство 1000 может быть автономным транспортным средством, управляемым автономно, без прямого вмешательства человека, для проезда по части транспортной сети транспортных средств. Хотя это не показано отдельно на фиг. 1, автономное транспортное средство может включать в себя блок управления автономным транспортным средством, который может выполнять маршрутизацию, навигацию и управление автономным транспортным средством. Блок управления автономным транспортным средством может быть интегрирован с другим блоком транспортного средства. Например, контроллер 1300 может включать в себя блок управления автономным транспортным средством.
[0041] Блок управления автономным транспортным средством может управлять транспортным средством 1000 или приводить его в действие для проезда по части транспортной сети транспортных средств в соответствии с текущими параметрами работы транспортного средства. Блок управления автономным транспортным средством может управлять транспортным средством 1000 или приводить его в действие, чтобы выполнять заданную операцию или маневр, такой как парковка транспортного средства. Блок управления автономным транспортным средством может генерировать маршрут движения от пункта отправления, такого как текущее местоположение транспортного средства 1000, к пункту назначения на основе информации о транспортном средстве, информации об окружающей обстановке, данных транспортной сети транспортных средств, представляющих транспортную сеть транспортных средств, или их комбинации и может управлять транспортным средством 1000 или приводить его в действие для проезда по транспортной сети транспортных средств в соответствии с маршрутом. Например, блок управления автономным транспортным средством может выводить маршрут движения на контроллер траектории, а контроллер траектории может управлять транспортным средством 1000 для перемещения от пункта отправления к пункту назначения, используя сгенерированный маршрут.
[0042] Фиг. 2 является схемой примера части системы транспортировки и связи транспортного средства, в которой могут быть реализованы раскрытые здесь аспекты, признаки и элементы. Система 2000 транспортировки и связи транспортного средства может включать в себя одно или более транспортных средств 2100/2110, таких как транспортное средство 1000, показанное на фиг. 1, которые могут передвигаться по одной или более частей одной или более транспортных сетей 2200 транспортных средств и может осуществлять связь через одну или более сетей 2300 электронной связи. Хотя это явно не показано на фиг. 2, транспортное средство может проезжать область, которая явно или не полностью включена в транспортную сеть транспортных средств, такую как область вне дороги.
[0043] Сеть 2300 электронной связи может быть, например, системой множественного доступа и может обеспечивать связь, такую как речевая связь, передача данных, видеосвязь, обмен сообщениями или их комбинацию, между транспортным средством 2100/2110 и одним или более устройствами 2400 связи. Например, транспортное средство 2100/2110 может принимать информацию, такую как информация, представляющую транспортную сеть 2200 транспортных средств, от устройства 2400 связи через сеть 2300.
[0044] В некоторых вариантах осуществления транспортное средство 2100/2110 может осуществлять связь через проводную линию связи (не показана), беспроводную линию 2310/2320/2370 связи или комбинацию любого количества проводных или беспроводных линий связи. Например, как показано, транспортное средство 2100/2110 может осуществлять связь через наземную линию 2310 беспроводной связи, через неназемную беспроводную линию 2320 связи или через их комбинацию. Наземная беспроводная линия 2310 связи может включать в себя линию Ethernet, последовательную линию, линию Bluetooth, инфракрасную (ИК) линию, ультрафиолетовую (УФ) линию или любую линию, способную обеспечить электронную связь.
[0045] Транспортное средство 2100/2110 может связываться с другим транспортным средством 2100/2110. Например, рассматриваемое или объектное транспортное средство (HV) 2100 может принимать одно или более автоматических сообщений между транспортными средствами, таких как базовое сообщение безопасности (BSM), от удаленного или целевого транспортного средства (RV) 2110 по прямой линии связи 2370 или через сеть 2300. Например, удаленное транспортное средство 2110 может транслировать сообщение рассматриваемым транспортным средствам в пределах заданного радиовещательного диапазона, такого как 300 метров. В некоторых вариантах осуществления рассматриваемое транспортное средство 2100 может принимать сообщение через третьего участника, такого как ретранслятор сигналов (не показан) или другое удаленное транспортное средство (не показано). Транспортное средство 2100/2110 может периодически передавать одно или более автоматических сообщений между транспортными средствами на основании, например, заданного интервала, такого как 100 миллисекунд.
[0046] Автоматические сообщения между транспортными средствами могут включать в себя идентификацию информации транспортного средства, информации о геопространственном состоянии, такой как информация о долготе, широте или высоте, информации о точности геопространственного местоположения, информации о кинематическом состоянии, такой как информация об ускорении транспортного средства, информация о скорости рыскания, информация о скорости, информация о курсе транспортного средства, информация о состоянии тормозной системы, информация о регуляторе подачи топлива, информация об угле поворота рулевого колеса или информация о маршруте транспортного средства или информации о состоянии транспортного средства, такой как информация о размере транспортного средства, информация о состоянии фар, информация о сигналах поворота, информация о состоянии стеклоочистителя, информация о трансмиссии, или любой другой информации или комбинации информации, относящейся к передаче состояния транспортного средства. Например, информация о состоянии трансмиссии может указывать, находится ли передача передающего транспортного средства в нейтральном состоянии, в состоянии парковки, в состоянии движения передним ходом или в состоянии движения задним ходом.
[0047] Транспортное средство 2100 может связываться с сетью 2300 связи через точку 2330 доступа. Точка 2330 доступа, которая может включать в себя вычислительное устройство, может быть сконфигурирована для связи с транспортным средством 2100, с сетью 2300 связи, с одним или более устройствами 2400 связи или с их комбинацией через проводные или беспроводные линии связи 2310/2340. Например, точка 2330 доступа может быть базовой станцией, базовой приемопередающей станцией (BTS), узлом B, усовершенствованным узлом B (eNode-B), домашним узлом B (HNode-B), беспроводным маршрутизатором, проводным маршрутизатором, концентратором, реле, коммутатором или любым подобным проводным или беспроводным устройством. Хотя показано как единое целое на фиг. 2, точка доступа может включать в себя любое количество взаимосвязанных элементов.
[0048] Транспортное средство 2100 может связываться с сетью 2300 связи через спутник 2350 или другое неназемное устройство связи. Спутник 2350, который может включать в себя вычислительное устройство, может быть сконфигурирован для связи с транспортным средством 2100, с сетью 2300 связи, с одним или более устройствами 2400 связи или с их комбинацией через одну или более линий 2320/2360 связи. Хотя показано как единое целое на фиг. 2, спутник может включать в себя любое количество взаимосвязанных элементов.
[0049] Сеть 2300 электронной связи может быть сетью любого типа, сконфигурированной для обеспечения передачи голоса, данных или любого другого типа электронной связи. Например, сеть 2300 электронной связи может включать в себя локальную сеть (LAN), глобальную сеть (WAN), виртуальную частную сеть (VPN), мобильную или сотовую телефонную сеть, Интернет или любую другую систему электронной связи. Сеть 2300 электронной связи может использовать протокол связи, такой как протокол управления передачей (TCP), протокол пользовательских датаграмм (UDP), интернет-протокол (IP), протокол передачи в реальном времени (RTP), протокол передачи гипертекста (HTTP) или их комбинацию. Хотя показано как единое целое на фиг. 2, сеть электронной связи может включать в себя любое количество взаимосвязанных элементов.
[0050] Транспортное средство 2100 может идентифицировать часть или состояние транспортной сети 2200 транспортных средств. Например, транспортное средство 2100 может включать в себя один или более датчиков 2105 на транспортном средстве, таких как датчик 1360, показанный на фиг. 1, который может включать в себя датчик скорости, датчик скорости вращения колеса, камеру, гироскоп, оптический датчик, лазерный датчик, радарный датчик, звуковой датчик или любой другой датчик или устройство или их комбинацию, способные определять или идентифицировать часть или состояние транспортной сети 2200 транспортных средств. Данные датчика могут включать в себя данные линии полосы движения, данные удаленного местоположения транспортного средства или и то и другое.
[0051] Транспортное средство 2100 может пересекать часть или части одной или более транспортных сетей 2200 транспортных средств, используя информацию, передаваемую через сеть 2300, такую как информация, представляющая транспортную сеть 2200 транспортных средств, информацию, идентифицированную одним или более датчиками 2105 на транспортном средстве, или их комбинацию.
[0052] Хотя для простоты на фиг. 2 показаны два транспортных средства 2100, 2110, одна транспортная сеть 2200 транспортных средств, одна сеть 2300 электронной связи и одно устройство 2400 связи, может использоваться любое количество транспортных средств, сетей или вычислительных устройств. Система 2000 транспортировки и связи транспортного средства может включать в себя устройства, блоки или элементы, не показанные на фиг. 2. Хотя транспортное средство 2100 показано как единое целое, транспортное средство может включать в себя любое количество взаимосвязанных элементов.
[0053] Хотя показано, что транспортное средство 2100 осуществляет связь с устройством 2400 связи через сеть 2300, транспортное средство 2100 может осуществлять связь с устройством 2400 связи через любое количество прямых или непрямых линий связи. Например, транспортное средство 2100 может связываться с устройством 2400 связи через прямую линию связи, такую как линия связи Bluetooth.
[0054] В некоторых вариантах осуществления транспортное средство 2100/2210 может быть ассоциировано с объектом 2500/2510, таким как водитель, оператор или владелец транспортного средства. В некоторых вариантах осуществления объект 2500/2510, ассоциированный с транспортным средством 2100/2110, может быть ассоциирован с одним или более персональными электронными устройствами 2502/2504/2512/2514, такими как смартфон 2502/2512 или компьютер 2504/2514. В некоторых вариантах осуществления персональное электронное устройство 2502/2504/2512/2514 может связываться с соответствующим транспортным средством 2100/2110 через прямую или непрямую линию связи. Хотя один объект 2500/2510 показан как ассоциированный с одним транспортным средством 2100/2110 на фиг. 2, любое количество транспортных средств может быть ассоциировано с объектом, и любое количество объектов может быть ассоциировано с транспортным средством.
[0055] Фиг. 3 является схемой части транспортной сети транспортных средств в соответствии с этим раскрытием. Транспортная сеть 3000 транспортных средств может включать в себя одну или более непригодных для навигации областей 3100, таких как здание, одну или более частично пригодных для навигации областей, таких как парковочная область 3200, одну или более пригодных для навигации областей, таких как дороги 3300/3400, или их комбинацию. В некоторых вариантах осуществления автономное транспортное средство, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, может пересекать часть или части транспортной сети 3000 транспортных средств.
[0056] Транспортная сеть 3000 транспортных средств может включать в себя одну или более развязок 3210 между одной или более пригодными для навигации или частично пригодными для навигации областей 3200/3300/3400. Например, часть транспортной сети 3000 транспортных средств, показанная на фиг. 3, включает в себя развязку 3210 между парковочной областью 3200 и дорогой 3400. Парковочная область 3200 может включать в себя парковочные места 3220.
[0057] Часть транспортной сети 3000 транспортных средств, такая как дорога 3300/3400, может включать в себя одну или более полос движения 3320/3340/3360/3420/3440 и может быть ассоциирована с одним или более направлениями движения, которые обозначены стрелками на фиг. 3.
[0058] Транспортная сеть транспортных средств или ее часть, такая как часть транспортной сети 3000 транспортных средств, показанная на фиг. 3, может быть представлена как данные транспортной сети транспортных средств. Например, данные транспортной сети транспортных средств могут быть выражены в виде иерархии элементов, таких как элементы языка разметки, которые могут храниться в базе данных или файле. Для простоты фигуры в данном документе изображают данные транспортной сети транспортных средств, представляющие части транспортной сети транспортных средств в виде диаграмм или карт, однако данные транспортной сети транспортных средств могут быть выражены в любой компьютерной форме, способной представлять транспортную сеть транспортных средств, или ее часть. Данные транспортной сети транспортных средств могут включать в себя информацию управления транспортной сетью транспортного средства, такую как информация о направлении движения, информация об ограничении скорости, информация о платных дорогах, информация об уклоне, такая как информация о наклоне или угле, информация о материале поверхности, эстетическая информация, информация об определенной опасности или их комбинацию.
[0059] Транспортная сеть транспортных средств может быть связана или может включать в себя пешеходную транспортную сеть. Например, фиг. 3 включает в себя часть 3600 пешеходной транспортной сети, которая может быть пешеходной дорожкой. Хотя это не показано отдельно на фиг. 3, пешеходная пригодная для навигации область, такая как пешеходный переход, может соответствовать пригодной для навигации области или частично пригодной для навигации области транспортной сети транспортных средств.
[0060] Часть или комбинация частей транспортной сети транспортных средств может быть идентифицирована как точка интереса или пункт назначения. Например, данные транспортной сети транспортных средств могут идентифицировать здание, такое как непригодная для навигации область 3100, и смежную частично пригодную для навигации парковочную область 3200 в качестве точки интереса, транспортное средство может идентифицировать точку интереса в качестве пункта назначения, и транспортное средство может проезжать из пункта отправления в пункт назначения путем проезда по транспортной сети транспортных средств. Хотя парковочная область 3200, ассоциированная с непригодной для навигации областью 3100, показана как смежная с непригодной для навигации областью 3100 на фиг. 3, пункт назначения может включать в себя, например, здание и парковочную область, которая физически или геопространственно не смежна со зданием.
[0061] Идентификация пункта назначения может включать в себя идентификацию местоположения для пункта назначения, которое может быть дискретной уникально идентифицируемой геолокацией. Например, транспортная сеть транспортных средств может включать в себя заданное местоположение, такое как адрес улицы, почтовый адрес, адрес транспортной сети транспортных средств, GPS адрес или их комбинацию для пункта назначения.
[0062] Пункт назначения может быть ассоциирован с одним или более входами, такими как вход 3500, показанный на фиг. 3. Данные транспортной сети транспортных средств могут включать в себя определенную информацию о местоположении входа, такую как информация, идентифицирующая геолокацию входа, связанного с пунктом назначения.
[0063] Пункт назначения может быть ассоциирован с одним или более местоположениями установки на место стоянки, такими как местоположение 3700 установки на место стоянки, показанное на фиг. 3. Местоположение 3700 установки на место стоянки может быть обозначенным или не обозначенным местоположением или областью вблизи пункта назначения, в котором автономное транспортное средство может останавливаться, стоять или парковаться таким образом, чтобы можно было выполнять операции установки на место стоянки, такие как погрузка или выгрузка пассажира.
[0064] Данные транспортной сети транспортных средств могут включать в себя информацию о местоположении установки на место стоянки, такую как информация, идентифицирующая геолокацию одного или более местоположений 3700 установки на место стоянки, ассоциированных с пунктом назначения. Хотя это не показано отдельно на фиг. 3, информация о местоположении установки на место стоянки может идентифицировать тип операции установки на место стоянки, ассоциированной с местоположением 3700 установки на место стоянки. Например, пункт назначения может быть связан с первым местоположением установки на место стоянки для погрузки пассажиров и вторым местом установки на место стоянки для выгрузки пассажиров. Хотя автономное транспортное средство может парковаться в местоположении установки на место стоянки, местоположение установки на место стоянки, ассоциированное с пунктом назначения, может быть независимым и отличным от парковочной области, ассоциированной с пунктом назначения.
[0065] Фиг.4 является блок-схемой примера системы 4000 управления работой автономного транспортного средства в соответствии с вариантами осуществления этого раскрытия. Система 4000 управления работой автономного транспортного средства может быть реализована в автономном транспортном средстве, таком как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономном транспортном средстве или любом другом транспортном средстве, реализующем автономное вождение.
[0066] Автономное транспортное средство может проезжать по транспортной сети транспортных средств или ее части, которая может включать в себя проезд по различным вариантам работы транспортного средства. Отдельный вариант работы транспортного средства может включать в себя любой четко идентифицируемый набор рабочих условий, которые могут влиять на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной окружающей обстановки автономного транспортного средства. Например, отдельный вариант работы транспортного средства может основываться на количестве или числе дорог, участков дороги или полос движения, по которым автономное транспортное средство может проехать в пределах заданного пространственно-временного расстояния. В другом примере отдельный вариант работы транспортного средства может быть основан на одном или более устройствах управления движением, которые могут влиять на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной окружающей обстановки автономного транспортного средства. В другом примере отдельный вариант работы транспортного средства может основываться на одном или более идентифицируемых правилах, положениях или законах, которые могут влиять на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной окружающей обстановки автономного транспортного средства. В другом примере отдельный вариант работы транспортного средства может основываться на одном или более идентифицируемых внешних объектах, которые могут влиять на работу автономного транспортного средства в пределах заданной пространственно-временной области или оперативной окружающей обстановки автономного транспортного средства.
[0067] Для простоты и ясности подобные варианты работы транспортного средства могут быть описаны в данном документе со ссылкой на типы или классы вариантов работы транспортного средства. Тип или класс варианта работы транспортного средства может ссылаться на заданный шаблон или заданный набор шаблонов варианта. Например, варианты при пересечении могут включать в себя автономное транспортное средство, пересекающее пересечение (перекресток), варианты при пешеходе могут включать в себя автономное транспортное средство, проезжающее по части транспортной сети транспортных средств, которая включает в себя или находится в заданной близости от одного или более пешеходов, таких как в которых пешеход пересекает или приближается к ожидаемому пути автономного транспортного средства, варианты при смене полосы движения могут включать в себя автономное транспортное средство, проезжающее по части транспортной сети транспортных средств путем смены полосы движения, варианты при слиянии могут включать в себя автономное транспортное средство, проезжающее по части транспортной сети транспортных средств путем проезда из первой полосы движения в объединенную полосу движения, варианты при обходе препятствия могут включать в себя автономное транспортное средство, которое проезжает по части транспортной сети транспортных средств, обходя помеху или препятствие. Хотя в данном документе описаны варианты работы транспортного средства при пешеходе, варианты работы транспортного средства при пересечении, варианты работы транспортного средства при смене полосы движения, варианты работы транспортного средства при слиянии и варианты работы транспортного средства при обходе препятствия, может быть использован любой другой вариант работы транспортного средства или тип варианта работы транспортного средства.
[0068] Как показано на фиг. 4, система 4000 управления работой автономного транспортного средства включает в себя контроллер 4100 управления работой автономного транспортного средства (AVOMC), блоки 4200 контроля оперативной окружающей обстановки и модули 4300 оценки управления работой.
[0069] AVOMC 4100 или другое устройство автономного транспортного средства может управлять автономным транспортным средством для проезда по транспортной сети транспортных средств или ее части. Управление автономным транспортным средством для проезда по транспортной сети транспортных средств может включать в себя контроль оперативной окружающей обстановки автономного транспортного средства, идентификацию или обнаружение различных вариантов работы транспортного средства, идентификацию действий-кандидатов управления транспортным средством на основе различных вариантов работы транспортного средства, управление автономным транспортным средством для проезда по части транспортной сети транспортных средств в соответствии с одним или более из действий-кандидатов управления транспортным средством или их комбинацией.
[0070] AVOMC 4100 может принимать, идентифицировать или иным образом осуществлять доступ к данным оперативной окружающей обстановки, представляющим оперативную окружающую обстановку для автономного транспортного средства, или к одному или более их аспектам. Оперативная окружающая обстановка автономного транспортного средства может включать в себя четко идентифицируемый набор рабочих условий, которые могут влиять на работу автономного транспортного средства в пределах заданной пространственно-временной области автономного транспортного средства, в пределах заданной пространственно-временной области идентифицированного маршрута для автономного транспортного средства, или их комбинации. Например, рабочие условия, которые могут влиять на работу автономного транспортного средства, могут быть идентифицированы на основе данных датчика, данных транспортной сети транспортных средств, данных маршрута или любых других данных или комбинации данных, представляющих заданную или определенную оперативную окружающую обстановку для транспортного средства.
[0071] Данные оперативной окружающей обстановки могут включать в себя информацию транспортного средства для автономного транспортного средства, такую как информация, указывающая геопространственное местоположение автономного транспортного средства, информацию, сопоставляющую геопространственное местоположение автономного транспортного средства с информацией, представляющей транспортную сеть транспортных средств, маршрут автономного транспортного средства, скорость автономного транспортного средства, состояние ускорения автономного транспортного средства, информацию о пассажире автономного транспортного средства или любую другую информацию об автономном транспортном средстве или работе автономного транспортного средства. Данные оперативной окружающей обстановки могут включать в себя информацию, представляющую транспортную сеть транспортных средств, ближайшую к идентифицированному маршруту для автономного транспортного средства, например, в пределах заданного пространственного расстояния, такого как 300 метров, части транспортной сети транспортных средств вдоль идентифицированного маршрута, которая может включать в себя информацию, указывающую геометрию одного или более аспектов транспортной сети транспортных средств, информацию, указывающую состояние, такое как состояние поверхности, транспортной сети транспортных средств или любую их комбинацию. Данные оперативной окружающей обстановки могут включать в себя информацию, представляющую транспортную сеть транспортных средств, ближайшую к автономному транспортному средству, например, в пределах заданного пространственного расстояния автономного транспортного средства, например 300 метров, которая может включать в себя информацию, указывающую геометрию одного или более аспектов транспортной сети транспортных средств, информацию, указывающую состояние, такое как состояние поверхности, транспортной сети транспортных средств или любую их комбинацию. Данные оперативной окружающей обстановки могут включать в себя информацию, представляющую внешние объекты в оперативной окружающей обстановке автономного транспортного средства, такую как информация, представляющая пешеходов, животных, не являющихся людьми, не моторизованные транспортные средства, такие как велосипеды или скейтборды, моторизованные транспортные устройства, такие как удаленные транспортные средства или любой другой внешний объект или объект, который может повлиять на работу автономного транспортного средства.
[0072] Аспекты оперативной окружающей обстановки автономного транспортного средства могут быть представлены в рамках соответствующих отдельных вариантов работы транспортного средства. Например, относительная ориентация, траектория, ожидаемый путь внешних объектов могут быть представлены в соответствующих различных вариантах работы транспортного средства. В другом примере относительная геометрия транспортной сети транспортных средств может быть представлена в соответствующих различных вариантах работы транспортных средств.
[0073] В качестве примера, первый отдельный вариант работы транспортного средства может соответствовать пешеходу, пересекающему дорогу на пешеходном переходе, и могут быть представлены относительная ориентация и ожидаемый путь пешехода, такие как пересечение слева направо для пересечения справа налево, в первом отдельном варианте работы транспортного средства. Второй отдельный вариант работы транспортного средства может соответствовать пешеходу, пересекающему дорогу путем пешеходного движения, и относительная ориентация и ожидаемый путь пешехода, такие как пересечение слева направо для пересечения справа налево, могут быть представлены во втором отдельном варианте работы транспортного средства.
[0074] Автономное транспортное средство может проходить множество различных вариантов работы транспортного средства в оперативной окружающей обстановке, которые могут быть аспектами составного варианта работы транспортного средства. Система 4000 управления работой автономного транспортного средства может приводить в действие автономное транспортное средство или управлять им для прохождения отдельных вариантов работы транспортного средства с учетом заданных ограничений, таких как ограничения безопасности, правовые ограничения, физические ограничения, ограничения приемлемости для пользователя или любые другие ограничения или комбинации ограничений, которые могут быть заданы или получены для работы автономного транспортного средства.
[0075] AVOMC 4100 может отслеживать оперативную окружающую обстановку автономного транспортного средства или определенные ее аспекты. Контроль оперативной окружающей обстановки автономного транспортного средства может включать в себя идентификацию и отслеживание внешних объектов, идентификацию различных вариантов работы транспортного средства или их комбинацию. Например, AVOMC 4100 может идентифицировать и отслеживать внешние объекты с оперативной окружающей обстановкой автономного транспортного средства. Идентификация и отслеживание внешних объектов может включать в себя идентификацию пространственно-временных местоположений соответствующих внешних объектов, которые могут относиться к автономному транспортному средству, идентификацию одного или более ожидаемых путей для соответствующих внешних объектов, что может включать в себя идентификацию скорости, траектории или обоих для внешнего объекта. Для простоты и ясности описания местоположений, ожидаемых местоположений, путей, ожидаемых путей и тому подобного в данном документе могут опускать явные указания на то, что соответствующие местоположения и пути относятся к геопространственным и временным компонентам, однако, если это явно не указано в настоящем документе или иным образом однозначно не ясно из контекста, местоположения, ожидаемые местоположения, пути, ожидаемые пути и т.п., описанные в данном документе, могут включать в себя геопространственные компоненты, временные компоненты или оба. Контроль оперативной окружающей обстановки автономного транспортного средства может включать в себя использование данных оперативной окружающей обстановки, полученных от блоков 4200 контроля оперативной окружающей обстановки.
[0076] Блоки 4200 контроля оперативной окружающей обстановки могут включать в себя независимые от варианта блоки контроля, блоки контроля для конкретного варианта или их комбинацию. Независимый от варианта блок контроля, такой как блок 4210 контроля блокировки, может отслеживать оперативную окружающую обстановку автономного транспортного средства, генерировать данные оперативной окружающей обстановки, представляющие аспекты оперативной окружающей обстановки автономного транспортного средства, и выводить данные оперативной окружающей обстановки в один или более блоков контроля для конкретного варианта, AVOMC 4100 или их комбинацию. Блок контроля для конкретного варианта, такой как блок 4220 контроля пешеходов, блок 4230 контроля пересечения, блок 4240 контроля смены полосы движения, блок 4250 контроля слияния или блок 4260 контроля препятствия впереди, могут отслеживать оперативную окружающую обстановку автономного транспортного средства, генерировать данные оперативной окружающей обстановки, представляющие аспекты для конкретного варианта оперативной окружающей обстановки автономного транспортного средства, и выводят данные оперативной окружающей обстановки в один или более модулей 4300 оценки управления работой для конкретного варианта, AVOMC 4100 или их комбинацию. Например, блок 4220 контроля пешеходов может быть блоком контроля оперативной окружающей обстановки для контроля пешеходов, блок 4230 контроля пересечения может быть блоком контроля оперативной окружающей обстановки для контроля пересечений, блок 4240 контроля смены полосы движения может быть блоком контроля оперативной окружающей обстановки для контроля смены полосы движения, блок 4250 контроля слияния может быть блоком контроля оперативной окружающей обстановки при слиянии, а блок 4260 контроля препятствия впереди может быть блоком контроля оперативной окружающей обстановки для контроля препятствий впереди. Блок 4270 контроля оперативной окружающей обстановки показан с использованием пунктирных линий, чтобы указать, что система 4000 управления работой автономного транспортного средства может включать в себя любое количество блоков 4200 контроля оперативной окружающей обстановки.
[0077] Блок 4200 контроля оперативной окружающей обстановки может принимать или иным образом получать доступ к данным оперативной окружающей обстановки, таким как данные оперативной окружающей обстановки, сгенерированные или захваченные одним или более датчиками автономного транспортного средства, данные транспортной сети транспортных средств, данные геометрии транспортной сети транспортных средств, данные маршрута или их комбинация. Например, блок 4220 контроля пешеходов может принимать или иным образом получать доступ к информации, такой как данные датчиков, которая может указывать, соответствовать или иным образом ассоциироваться с одним или более пешеходами в оперативной окружающей обстановке автономного транспортного средства. Блок 4200 контроля оперативной окружающей обстановки может ассоциировать данные оперативной окружающей обстановки или их часть с оперативной окружающей обстановкой или ее аспектом, например с внешним объектом, таким как пешеход, удаленное транспортное средство или аспект геометрии транспортной сети транспортных средств.
[0078] Блок 4200 контроля оперативной окружающей обстановки может генерировать или иным образом идентифицировать информацию, представляющую один или более аспектов оперативной окружающей обстановки, таких как внешний объект, такой как пешеход, удаленное транспортное средство, или аспект геометрии транспортной сети транспортных средств, что может включать в себя фильтрацию, абстрагирование или иную обработку данных оперативной окружающей обстановки. Блок 4200 контроля оперативной окружающей обстановки может выводить информацию, представляющую один или более аспектов оперативной окружающей обстановки, в AVOMC 4100 или для доступа AVOMC 4100, например, путем хранения информации, представляющей один или более аспектов оперативной окружающей обстановки, в памяти, такой как память 1340, показанная на фиг. 1, автономного транспортного средства, доступная для AVOMC 4100, отправки информации, представляющей один или более аспектов оперативной окружающей обстановки, в AVOMC 4100 или их комбинацию. Блок 4200 контроля оперативной окружающей обстановки может выводить данные оперативной окружающей обстановки в один или более элементов системы 4000 управления работой автономного транспортного средства, таких как AVOMC 4100. Хотя это не показано на фиг. 4, блок 4220, 4230, 4240, 4250, 4260 контроля оперативной окружающей обстановки для конкретного варианта, может выводить данные оперативной окружающей обстановки на независимый от варианта блок контроля оперативной окружающей обстановки, такой как блок 4210 контроля блокировки.
[0079] Блок 4220 контроля пешеходов может коррелировать, ассоциировать или иным образом обрабатывать данные оперативной окружающей обстановки для идентификации, отслеживания или прогнозирования действий одного или более пешеходов. Например, блок 4220 контроля пешеходов может принимать информацию, такую как данные датчиков, от одного или более датчиков, которые могут соответствовать одному или более пешеходам, блок 4220 контроля пешеходов может ассоциировать данные датчиков с одним или более идентифицированными пешеходами, что может включать в себя возможную идентификацию направления движения, пути, такого как ожидаемый путь, текущей или ожидаемой скорости, текущей или ожидаемой степени ускорения или их комбинации для одного или более из соответствующих идентифицированных пешеходов, и блок 4220 контроля пешеходов может выводить идентифицированную, ассоциированную или сгенерированную информацию о пешеходе в AVOMC 4100 или для доступа AVOMC 4100.
[0080] Блок 4230 контроля пересечения может коррелировать, ассоциировать или иным образом обрабатывать данные оперативной окружающей обстановки, чтобы идентифицировать, отслеживать или прогнозировать действия одного или более удаленных транспортных средств в оперативной окружающей обстановке автономного транспортного средства, чтобы идентифицировать пересечение или его аспект в оперативной окружающей обстановке автономного транспортного средства для идентификации геометрии транспортной сети транспортных средств или их комбинации. Например, блок 4230 контроля пересечения может принимать информацию, такую как данные датчика, от одного или более датчиков, которые могут соответствовать одному или более удаленным транспортным средствам в оперативной окружающей обстановке автономного транспортного средства, пересечению или одному или более их аспектам в оперативной окружающей обстановке автономного транспортного средства, геометрии транспортной сети транспортных средств или их комбинации, блок 4230 контроля пересечения может ассоциировать данные датчика с одним или более идентифицированными удаленными транспортными средствами в оперативной окружающей обстановке автономного транспортного средства, пересечение или один или более его аспектов в оперативной окружающей обстановке автономного транспортного средства, геометрии транспортной сети транспортных средств или их комбинации, что может включать в себя возможную идентификацию текущего или ожидаемого направления движения, пути, такого как ожидаемый путь, текущей или ожидаемой скорости, текущей или ожидаемой степени ускорения или их комбинации для одного или более соответствующих идентифицированных удаленных транспортных средств, и блок 4230 контроля пересечения может выводить идентифицированную, ассоциированную или сгенерированную информацию о пересечении в AVOMC 4100 или для доступа AVOMC 4100.
[0081] Блок 4240 контроля смены полосы движения может коррелировать, ассоциировать или иным образом обрабатывать данные оперативной окружающей обстановки, чтобы идентифицировать, отслеживать или прогнозировать действия одного или более удаленных транспортных средств в оперативной окружающей обстановке автономного транспортного средства, такие как информация, указывающая медленное или стоящее удаленное транспортное средство вдоль ожидаемого пути автономного транспортного средства, чтобы идентифицировать один или более аспектов окружающей обстановки автономного транспортного средства, таких как геометрия транспортной сети транспортных средств в оперативной окружающей обстановке автономного транспортного средства, или их комбинацию, геопространственно соответствующим операции смены полосы движения. Например, блок 4240 контроля смены полосы движения может принимать информацию, такую как данные датчиков, от одного или более датчиков, которые могут соответствовать одному или более удаленным транспортным средствам в оперативной окружающей обстановке автономного транспортного средства, одному или более аспектам оперативной окружающей обстановки автономного транспортного средства в оперативной окружающей обстановке автономного транспортного средства или их комбинации, геопространственно соответствующим операции смены полосы движения, блок 4240 контроля смены полосы движения может ассоциировать данные датчика с одним или более идентифицированными удаленными транспортными средствами в оперативной окружающей обстановке автономного транспортного средства, одним или более аспектов окружающей обстановки автономного транспортного средства или их комбинации, геопространственно соответствующим операции смены полосы движения, что может включать в себя возможную идентификацию текущего или ожидаемого направления движения, пути, такого как ожидаемый путь, текущей или ожидаемой скорости, текущей или ожидаемой степени ускорения или их комбинации для одного или более соответственных идентифицированных удаленных транспортных средств, и блок 4240 контроля смены полосы движения может выводить идентифицированную, ассоциированную или сгенерированную информацию смены полосы движения на AVOMC 4100 или для доступа AVOMC 4100.
[0082] Блок 4250 контроля слияния может коррелировать, ассоциировать или иным образом обрабатывать информацию оперативной окружающей обстановки для идентификации, отслеживания или прогнозирования действий одного или более удаленных транспортных средств в оперативной окружающей обстановке автономного транспортного средства, чтобы идентифицировать один или более аспектов оперативной окружающей обстановки автономного транспортного средства, таких как геометрия транспортной сети транспортных средств в оперативной окружающей обстановке автономного транспортного средства, или их комбинацию, геопространственно соответствующих операции слияния. Например, блок 4250 контроля слияния может принимать информацию, такую как данные датчиков, от одного или более датчиков, которые могут соответствовать одному или более удаленным транспортным средствам в оперативной окружающей обстановке автономного транспортного средства, одному или более аспектам оперативной окружающей обстановки автономного транспортного средства в оперативной окружающей обстановке автономного транспортного средства или их комбинации, геопространственно соответствующим операции слияния, блок 4250 контроля слияния может ассоциировать данные датчика с одним или более идентифицированными удаленными транспортными средствами в оперативной окружающей обстановке автономного транспортного средства, одним или более аспектами окружающей обстановки автономного транспортного средства или их комбинации, геопространственно соответствующим операции слияния, которая может включать в себя возможную идентификацию текущего или ожидаемого направления движения, пути, такого как ожидаемый путь, текущей или ожидаемой скорости, текущей или ожидаемой степени ускорения или их комбинации для одного или более соответствующих идентифицированных удаленных транспортных средств, и блок 4250 контроля слияния может выводить идентифицированную, ассоциированную или сгенерированную информацию о слиянии на AVOMC 4100 или для доступа AVOMC 4100.
[0083] Блок 4260 контроля препятствия впереди может коррелировать, ассоциировать или иным образом обрабатывать информацию оперативной окружающей обстановки, чтобы идентифицировать один или более аспектов окружающей обстановки автономного транспортного средства, геопространственно соответствующих операции обхода препятствия впереди. Например, блок 4260 контроля препятствия впереди может идентифицировать геометрию транспортной сети транспортных средств в оперативной окружающей обстановке автономного транспортного средства, блок 4260 контроля препятствия впереди может идентифицировать одно или более препятствий или помех в оперативной окружающей обстановке автономного транспортного средства, таких как медленное или стоящее удаленное транспортное средство, вдоль ожидаемого пути автономного транспортного средства или вдоль идентифицированного маршрута для автономного транспортного средства, и блок 4260 контроля препятствия впереди может идентифицировать, отслеживать или прогнозировать действия одного или более удаленных транспортных средств в оперативной окружающей обстановке автономного транспортного средства. Блок 4250 контроля препятствия впереди может принимать информацию, такую как данные датчиков, от одного или более датчиков, которые могут соответствовать одному или более удаленным транспортным средствам в оперативной окружающей обстановке автономного транспортного средства, одному или более аспектам окружающей обстановки автономного транспортного средства в оперативной окружающей обстановке автономного транспортного средства или их комбинации, геопространственно соответствующим операции обхода препятствия впереди, блок 4250 контроля препятствия впереди может ассоциировать данные датчика с одним или более идентифицированными удаленными транспортными средствами в оперативной окружающей обстановке автономного транспортного средства, одним или более аспектами окружающей обстановки автономного транспортного средства или их комбинации, геопространственно соответствующим операции обхода препятствия впереди, которые могут включать в себя возможную идентификацию текущего или ожидаемого направления движения, пути, такого как ожидаемый путь, текущей или ожидаемой скорости, текущей или ожидаемой степени ускорения или их комбинации для одно или более из соответствующих идентифицированных удаленных транспортных средств, и блок 4250 контроля препятствия впереди может выводить идентифицированную, ассоциированную или сгенерированную информацию препятствия впереди на AVOMC 4100 или для доступа AVOMC 4100.
[0084] Блок контроля 4210 блокировки может принимать данные оперативной окружающей обстановки, представляющие оперативную окружающую обстановку или ее аспект, для автономного транспортного средства. Блок 4210 контроля блокировки может определять соответствующую вероятность доступности или соответствующую вероятность блокировки для одной или более частей транспортной сети транспортных средств, таких как части транспортной сети транспортных средств, ближайших к автономному транспортному средству, которые могут включать в себя части транспортной сети транспортных средств, соответствующей ожидаемому пути автономного транспортного средства, такому как ожидаемый путь, идентифицированный на основе текущего маршрута автономного транспортного средства. Вероятность доступности или соответствующая вероятность блокировки могут указывать вероятность или возможность того, что автономное транспортное средство может безопасно проехать по части или пространственному местоположению в пределах транспортной сети транспортных средств, например, без помех внешнего объекта, такого как удаленное транспортное средство или пешеход. Блок 4210 контроля блокировки может определять или обновлять вероятности доступности постоянно или периодически. Блок 4210 контроля блокировки может передавать вероятности доступности или соответствующие вероятности блокировки в AVOMC 4100.
[0085] AVOMC 4100 может идентифицировать один или более различных вариантов работы транспортного средства на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки. Например, AVOMC 4100 может идентифицировать отдельный вариант работы транспортного средства в ответ на идентификацию или на основании данных оперативной окружающей обстановки, указанных одним или более блоками 4200 контроля оперативной окружающей обстановки. Отдельный вариант работы транспортного средства может быть идентифицирован на основе данных о маршруте, данных датчика или их комбинации. Например, AVOMC 4100 может идентифицировать один или более различных вариантов работы транспортного средства, соответствующих идентифицированному маршруту для транспортного средства, например, на основе картографических данных, соответствующих идентифицированному маршруту, в ответ на идентификацию маршрута. Множество различных вариантов работы транспортного средства могут быть идентифицированы на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки. Например, данные оперативной окружающей обстановки могут включать в себя информацию, представляющую пешехода, приближающегося к пересечению вдоль ожидаемого пути для автономного транспортного средства, и AVOMC 4100 может идентифицировать вариант работы транспортного средства при пешеходе, вариант работы транспортного средства при пересечении или оба.
[0086] AVOMC 4100 может инстанцировать соответственные экземпляры одного или более модули 4300 оценки управления работой на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки. Модули 4300 оценки управления работой могут включать в себя модули оценки управления работой для конкретного варианта (SSOCEM), такие как SSOCEM 4310 при пешеходе, SSOCEM 4320 при пересечении, SSOCEM 4330 при смене полосы движения, SSOCEM 4340 при слиянии, SSOCEM 4350 при обходе препятствия или их комбинацию. SSOCEM 4360 показан с использованием пунктирных линий, чтобы указать, что система 4000 управления работой автономного транспортного средства может включать в себя любое количество SSOCEM 4300. Например, AVOMC 4100 может инстанцировать экземпляр SSOCEM 4300 в ответ на идентификацию отдельного варианта работы транспортного средства. AVOMC 4100 может инстанцировать множество экземпляров одного или более SSOCEM 4300 на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки. Например, данные оперативной окружающей обстановки могут указывать двух пешеходов в оперативной окружающей обстановке автономного транспортного средства, и AVOMC 4100 может инстанцировать соответствующий экземпляр SSOCEM 4310 при пешеходе для каждого пешехода на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки.
[0087] AVOMC 4100 может отправлять данные оперативной окружающей обстановки или один или более их аспектов другому блоку автономного транспортного средства, такому как блок 4210 контроля блокировки, или одному или более экземплярам SSOCEM 4300. Например, AVOMC 4100 может передавать вероятности доступности или соответствующие вероятности блокировки, принятые от блока 4210 контроля блокировки, в соответственные инстанцированные экземпляры SSOCEM 4300. AVOMC 4100 может хранить данные оперативной окружающей обстановки или один или более их аспектов, например, в памяти, такой как память 1340, показанная на фиг. 1, автономного транспортного средства.
[0088] Управление автономным транспортным средством для проезда по транспортной сети транспортного средства может включать в себя идентификацию действий-кандидатов управления транспортным средством на основе различных вариантов работы транспортного средства, управление автономным транспортным средством для проезда по части транспортной сети транспортных средств в соответствии с одним или более из действий-кандидатов управления транспортным средством или их комбинации. Например, AVOMC 4100 может принимать одно или более действий-кандидатов управления транспортным средством из соответствующих экземпляров SSOCEM 4300. AVOMC 4100 может идентифицировать действие управления транспортным средством из действий-кандидатов управления транспортным средством и может управлять транспортным средством или может предоставлять идентифицированное действие управления транспортным средством другому блоку управления транспортным средством для проезда по транспортной сети транспортных средств в соответствии с действием управления транспортным средством.
[0089] Действие управления транспортным средством может указывать операцию или маневр управления транспортным средством, такой как ускорение, замедление, поворот, остановка или любая другая операция транспортного средства, или комбинацию операций транспортного средства, которые могут выполняться автономным транспортным средством в сочетании с проездом по части транспортной сети транспортных средств. Например, действие управления транспортным средством «перемещение вперед» может включать в себя медленное перемещение вперед на короткое расстояние, такое как несколько дюймов или фут, действие управления транспортным средством «ускорение» может включать в себя ускорение с заданной степенью ускорения или со степенью ускорения в пределах заданного диапазона, действие управления транспортным средством «замедление» может включать в себя замедление с заданной степенью замедления или со степенью замедления в пределах заданного диапазона, действие управления транспортным средством «поддержание» может включать в себя поддержание текущих рабочих параметров, таких как поддержание текущей скорости, текущего пути или маршрута или текущей ориентации полосы движения, и действие управления транспортным средством «продолжение» может включать в себя начало или возобновление ранее идентифицированного набора рабочих параметров. Хотя некоторые действия управления транспортным средством описаны в данном документе, могут использоваться другие действия управления транспортным средством.
[0090] Действие управления транспортным средством может включать в себя один или более показателей выполнения. Например, действие управления транспортным средством «остановка» может включать в себя показатель замедления в качестве показателя выполнения. В другом примере действие управления транспортным средством «продолжение» может явно указывать информацию о маршруте или пути, информацию о скорости, степени ускорения или их комбинацию в качестве показателей выполнения или может явно или неявно указывать, что текущий или ранее идентифицированный путь, скорость, степень ускорения или их комбинация может поддерживаться. Действие управления транспортным средством может быть составным действием управления транспортным средством, которое может включать последовательность, комбинацию или оба из действий управления транспортным средством. Например, действие управления транспортным средства «перемещение вперед» может указывать действие управления транспортным средством «остановка», последующее действие управления транспортным средством «ускорение», ассоциированное с заданной степенью ускорения, и последующее действие управления транспортным средством «остановка», ассоциированное с заданной степенью замедления так, что управление автономным транспортным средством в соответствии с действием управления транспортным средством «перемещение вперед» включает в себя управление автономным транспортным средством, чтобы медленно перемещаться вперед на короткое расстояние, такое как несколько дюймов или фут.
[0091] AVOMC 4100 может деинстанцировать экземпляр SSOCEM 4300. Например, AVOMC 4100 может идентифицировать отдельный набор рабочих условий как указывающий отдельный вариант работы транспортного средства для автономного транспортного средства, инстанцировать экземпляр SSOCEM 4300 для отдельного варианта работы транспортного средства, контролировать рабочие условия, впоследствии определять, что одно или более рабочих условий недействительны или имеют вероятность повлиять на работу автономного транспортного средства ниже заданного порогового значения, и AVOMC 4100 может деинстанцировать экземпляр SSOCEM 4300.
[0092] AVOMC 4100 может инстанцировать и деинстанцировать экземпляры SSOCEM 4300 на основе одного или более управляющих показателей управления работой транспортного средства, таких как показатель имманентности, показатель срочности, показатель полезности, показатель приемлемости или их комбинация. Показатель имманентности может указывать, представлять или основываться на пространственном, временном или пространственно-временном расстоянии или близости, которые могут быть ожидаемым расстоянием или близостью, для транспортного средства, чтобы проехать по транспортной сети транспортных средств от текущего местоположения транспортного средства до части транспортной сети транспортных средств, соответствующей соответственному идентифицированному варианту работы транспортного средства. Показатель срочности может указывать, представлять или основываться на измерении пространственного, временного или пространственно-временного расстояния, доступного для управления транспортным средством для проезда по части транспортной сети транспортного средства, соответствующей соответственному идентифицированному варианту работы транспортного средства. Показатель полезности может указывать, представлять или основываться на ожидаемом значении инстанцирования экземпляра SSOCEM 4300, соответствующего соответственному идентифицированному варианту работы транспортного средства. Показатель приемлемости может быть показателем безопасности, таким как показатель, указывающей предотвращение столкновений, показателем соответствия управления транспортной сети транспортных средств, таким как показатель, указывающий соответствие правилам и положениям транспортной сети транспортных средств, показателем физической способности, таким как показатель, указывающий максимальную тормозную способность транспортного средства, заданным пользователем показателем, таким как предпочтения пользователя. Могут быть использованы другие показатели или комбинации показателей. Управляющий показатель управления работой транспортного средства может указывать заданную величину, диапазон или предел. Например, показатель приемлемости может указывать заданную целевую степень замедления, заданный диапазон степени замедления или заданную максимальную степень замедления.
[0093] SSOCEM 4300 может включать в себя одну или более моделей соответственного отдельного варианта работы транспортного средства. Система 4000 управления работой автономного транспортного средства может включать в себя любое количество SSOCEM 4300, каждый из которых включает в себя модели соответственного отдельного варианта работы транспортного средства. SSOCEM 4300 может включать одну или более моделей из одного или более типов моделей. Например, SSOCEM 4300 может включать в себя модель частично наблюдаемого процесса принятия решений Маркова (POMDP), модель процесса принятия решений Маркова (MDP), модель классического планирования, модель частично наблюдаемой стохастической игры (POSG), модель децентрализованного частично наблюдаемого процесса принятия решений Маркова (Dec-POMDP), модель обучения с усилением (RL), модель искусственной нейронной сети или любую другую модель соответственного отдельного варианта работы транспортного средства. Каждый другой тип модели может иметь соответственные характеристики для точности и использования ресурсов. Например, модель POMDP для заданного варианта может иметь большую точность и большее использование ресурсов, чем модель MDP для заданного варианта. Модели, включенные в SSOCEM 4300, могут быть упорядочены, например, иерархически, например, на основе точности. Например, назначенная модель, такая как самая точная модель, включенная в SSOCEM 4300, может быть идентифицирована как первичная модель для SSOCEM 4300, а другие модели, включенные в SSOCEM 4300, могут быть идентифицированы как вторичные модели.
[0094] В одном примере, один или более из SSOCEM 4300 могут включать модель POMDP, которая может быть одноагентной моделью. Модель POMDP может моделировать отдельный вариант работы транспортного средства, который может включать в себя моделирование неопределенности, используя набор (S) состояний, набор действий (A), набор наблюдений (Ω), набор вероятностей (T) смены (перехода) состояния, набор условных вероятностей (O) наблюдения, функцию (R) вознаграждения или их комбинацию. Модель POMDP может быть задана или описана как кортеж (набор элементов)
[0095] Состояние из набора (S) состояний может представлять отдельное состояние соответственных заданных аспектов, таких как внешние объекты и устройства управления движением, оперативной окружающей обстановки автономного транспортного средства, которые могут вероятностно влиять на работу автономного транспортного средства в дискретном временном местоположении. Соответственный набор (S) состояний может быть задан для каждого отдельного варианта работы транспортного средства. Каждое состояние (пространство состояний) из набора (S) состояний может включать в себя один или более заданных факторов состояния. Хотя здесь описаны некоторые примеры факторов состояния для некоторых моделей, модель, включая любую модель, описанную здесь, может включать в себя любое количество или число факторов состояния. Каждый фактор состояния может представлять заданный аспект соответственного варианта и может иметь соответственный заданный набор значений. Хотя некоторые примеры значений коэффициентов состояния для некоторых факторов состояния описаны в данном документе, фактор состояния, включая любой фактор состояния, описанный в данном документе, может включать в себя любое число или количество значений.
[0096] Действие из набора действий (A) может указывать доступное действие управления транспортным средством в каждом состоянии в наборе (S) состояний. Соответственный набор действий может быть задан для каждого отдельного варианта работы транспортного средства. Каждое действие (пространство действий) из набора действий (A) может включать в себя один или более заданных факторов действия. Хотя здесь описаны некоторые примеры факторов действия для некоторых моделей, модель, включая любую модель, описанную в данном документе, может включать в себя любое число или количество факторов действия. Каждый фактор действия может представлять доступное действие управления транспортным средством и может иметь соответственный заданный набор значений. Хотя здесь описаны некоторые примеры значений фактора действия для некоторых факторов действия, фактор действия, включающий в себя любой фактор действия, описанный здесь, может включать в себя любое число или количество значений.
[0097] Наблюдение из набора наблюдений (Ω) может указывать доступные, наблюдаемые, измеряемые или определяемые данные для каждого состояния из набора (S) состояний. Соответственный набор наблюдений может быть задан для каждого отдельного варианта работы транспортного средства. Каждое наблюдение (пространство наблюдений) из набора наблюдений (Ω) может включать в себя один или более заданных факторов наблюдения. Хотя здесь описаны некоторые примеры факторов наблюдения для некоторых моделей, модель, включая любую модель, описанную здесь, может включать в себя любое число или количество факторов наблюдения. Каждый фактор наблюдений может представлять доступные наблюдения и может иметь соответственный заданный набор значений. Хотя здесь описаны некоторые примеры значений фактора наблюдения для некоторых факторов наблюдения, фактор наблюдения, включая любой фактор наблюдения, описанный в данном документе, может включать в себя любое число или количество значений.
[0098] Вероятность смены состояния из набора вероятностей (T) смены состояния может вероятностно представлять изменения в оперативной окружающей обстановке автономного транспортного средства, как представлено набором (S) состояний в ответ на действия автономного транспортного средства, как представлено набором действий (A), которая может быть выражена как T:S×A×S→[0, 1]. Соответственный набор вероятностей (T) смены состояния может быть задан для каждого отдельного варианта работы транспортного средства. Хотя здесь описаны некоторые примеры вероятностей смены состояния для некоторых моделей, модель, включающая в себя любую модель, описанную в данном документе, может включать в себя любое число или количество вероятностей смены состояния. Например, каждая комбинация состояния, действия и последующего состояния может быть ассоциирована с соответственной вероятностью смены состояния.
[0099] Условная вероятность наблюдения из набора условных вероятностей (O) наблюдения может представлять вероятности проведения соответствующих наблюдений (Ω) на основе оперативной окружающей обстановки автономного транспортного средства, как представлено набором (S) состояний в ответ на действия автономного транспортного средства, представленных набором действий (A), которая может быть представлена как O:A×S×Ω→[0, 1]. Соответственный набор условных вероятностей (O) наблюдения может быть задан для каждого отдельного варианта работы транспортного средства. Хотя здесь описаны некоторые примеры условных вероятностей наблюдения состояния для некоторых моделей, модель, включая любую модель, описанную в данном документе, может включать в себя любое число или количество условных вероятностей наблюдения. Например, каждая комбинация действия, последующего состояния и наблюдения может быть связана с соответственной условной вероятностью наблюдения.
[0100] Функция (R) вознаграждения может задавать соответственные положительное или отрицательное (стоимостное) значение, которое может быть начислено для каждой комбинации состояния и действия, которое может представлять ожидаемое значение автономного транспортного средства, проезжающего по транспортной сети транспортных средств, из соответствующего состояния в соответствии с соответствующим действием управления транспортным средством в последующее состояние, которое может быть выражено как

[0101] Для простоты и ясности примеры значений модели, такие как значения фактора состояния или значения фактора наблюдения, описанные здесь, включают в себя категориальные представления, такие как {начало, цель} или {короткое, длинное}. Категориальные значения могут представлять определенные дискретные значения, которые могут быть относительными значениями. Например, фактор состояния, представляющий временной аспект, может иметь значения из набора {короткое, длинное}, значение «короткое» может представлять дискретные значения, такие как временное расстояние, в пределах или меньше заданного порогового значения, такого как три секунды, а значение «длинное» может представлять дискретные значения, такие как временное расстояние, по меньшей мере такой как равен или более, чем заданное пороговое значение. Заданные пороговые значения для соответственных категориальных значений могут быть заданы относительно ассоциированных факторов. Например, заданное пороговое значение для набора {короткое, длинное} для временного фактора может быть ассоциировано со значением фактора относительного пространственного местоположения, а другое заданное пороговое значение для набора {короткое, длинное} для временного фактора может быть ассоциировано с другим значением фактора относительного пространственного местоположения. Хотя в данном документе описаны категориальные представления значений факторов, могут использоваться другие представления или комбинации представлений. Например, набор значений фактора временного состояния может быть {короткое (представляющим значения менее трех секунд), 4, 5, 6, длинное (представляющим значения по меньшей мере 7 секунд)}.
[0102] В некоторых вариантах осуществления, таких как варианты осуществления, реализующие модель POMDP, моделирование варианта управления работой автономного транспортного средства может включать моделирование окклюзий. Например, данные оперативной окружающей обстановки могут включать в себя информацию, соответствующую одной или более окклюзиям, таким как окклюзии датчика, в оперативной окружающей обстановке автономного транспортного средства, так что данные оперативной окружающей обстановки могут пропускать информацию, представляющую один или более скрытых внешних объектов в оперативной окружающей обстановке автономного транспортного средства. Например, окклюзия может быть внешним объектом, таким как дорожные знаки, здание, дерево, идентифицированный внешний объект, или любым другим рабочим условием или комбинацией рабочих условий, способных перекрывать одно или более других рабочих условий, таких как внешние объекты, из автономного транспортного средства в заданном пространственно-временном местоположении. В некоторых вариантах осуществления блок 4200 контроля оперативной окружающей обстановки может идентифицировать окклюзии, может идентифицировать или определять вероятность того, что внешний объект закрыт или скрыт идентифицированной окклюзией, и может включать в себя информацию вероятности закрытого транспортного средства в данных оперативной окружающей обстановки, выводимых в AVOMC 4100 и сообщаемых AVOMC 4100 соответственным SSOCEM 4300.
[0103] Система 4000 управления работой автономного транспортного средства может включать в себя любое количество или комбинацию типов моделей. Например, SSOCEM 4310 при пешеходе, SSOCEM 4320 при пересечении, SSOCEM 4330 при смене полосы движения, SSOCEM 4340 при слиянии и SSOCEM 4350 при обходе препятствия могут быть моделями POMDP. В другом примере, SSOCEM 4310 при пешеходе может быть моделью MDP, а SSOCEM 4320 при пересечении может быть моделью POMDP. AVOMC 4100 может инстанцировать любое количество экземпляров SSOCEM 4300 на основе данных оперативной окружающей обстановки.
[0104] Инстанцирование экземпляра SSOCEM 4300 может включать в себя идентификацию модели из SSOCEM 4300 и инстанцирование экземпляра идентифицированной модели. Например, SSOCEM 4300 может включать в себя первичную модель и вторичную модель для соответствующего отдельного варианта работы транспортного средства, и инстанцирование экземпляра SSOCEM 4300 может включать в себя идентификацию первичной модели в качестве текущей модели и инстанцирование экземпляра первичной модели. Инстанцирование модели может включать в себя определение, доступно ли решение или политика для модели. Инстанцирование модели может включать в себя определение, является ли доступное решение или политика для модели частично решаемым или сходящимся и решаемым. Инстанцирование SSOCEM 4300 может включать в себя инстанцирование экземпляра решения или политики для идентифицированной модели для SSOCEM 4300.
[0105] Решение модели, такой как модель POMDP, может включать в себя определение политики или решения, которое может быть функцией, которая максимизирует накопленное вознаграждение, которое может быть определено путем оценки возможных комбинаций элементов кортежа, таких как
[0106] Фиг.5 является блок-схемой последовательности операций примера управления 5000 работой автономного транспортного средства в соответствии с вариантами осуществления этого раскрытия. Управление 5000 работой автономного транспортного средства может быть реализовано в автономном транспортном средстве, таком как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение. Например, автономное транспортное средство может реализовывать систему управления работой автономного транспортного средства, такую как система 4000 управления работой автономного транспортного средства, показанная на фиг. 4.
[0107] Как показано на фиг. 5, управление 5000 работой автономного транспортного средства включает в себя реализацию или приведение в действие системы управления работой автономного транспортного средства, включая один или более модулей или ее компонентов, которое может включать в себя приведение в действие контроллера 5100 управления работой автономного транспортного средства (AVOMC), такого как AVOMC 4100, показанный на фиг. 4, блоков 5200 контроля оперативной окружающей обстановки, таких как один или более блоков 4300 контроля оперативной окружающей обстановки, показанных на фиг. 4, и приведение в действие экземпляра 5300 модуля оценки управления работой для конкретного варианта (экземпляра SSOCEM), такого как экземпляр SSOCEM 4300, показанный на фиг. 4.
[0108] AVOMC 5100 может отслеживать оперативную окружающую обстановку автономного транспортного средства или ее заданные аспекты на этапе 5110, чтобы идентифицировать оперативную окружающую обстановку или ее аспект автономного транспортного средства. Например, блоки 5200 контроля оперативной окружающей обстановки могут контролировать аспекты для конкретного варианта оперативной окружающей обстановки и могут отправлять данные оперативной окружающей обстановки, представляющие оперативную окружающую обстановку, в AVOMC 5100. Контроль оперативной окружающей обстановки автономного транспортного средства может включать в себя идентификацию и отслеживание внешних объектов на этапе 5110, идентификацию различных вариантов работы транспортного средства на этапе 5120 или их комбинацию. Например, AVOMC 5100, блоки 5200 контроля оперативной окружающей обстановки или оба могут идентифицировать данные оперативной окружающей обстановки на основе данных датчиков, данных транспортного средства, данных о маршруте, данных транспортной сети транспортных средств, ранее определенных данных оперативной окружающей обстановки или любых других доступных данных, или комбинации данных, описывающих аспект или аспекты оперативной окружающей обстановки.
[0109] Идентификация оперативной окружающей обстановки может включать в себя идентификацию данных оперативной окружающей обстановки, представляющих оперативную окружающую обстановку, или одного или более ее аспектов. Данные оперативной окружающей обстановки могут включать в себя информацию транспортного средства для автономного транспортного средства, информацию, представляющую транспортную сеть транспортных средств, или один или более ее аспектов, ближайших к автономному транспортному средству, информацию, представляющую внешние объекты, или один или более их аспектов, в оперативной окружающей обстановке автономного транспортного средства вдоль или вблизи маршрута, идентифицированного для автономного транспортного средства, или их комбинацию. Информация датчика может быть обработанной информацией датчика, такой как обработанная информация датчика от блока обработки информации датчика автономного транспортного средства, который может принимать информацию датчика от датчика автономного транспортного средства и может генерировать обработанную информацию датчика на основе информации датчика.
[0110] Идентификация данных оперативной окружающей обстановки может включать в себя прием информации, указывающей один или более аспектов окружающей обстановки, от датчика автономного транспортного средства, такого как датчик 1360, показанный на фиг. 1 или датчики 2105 на транспортном средстве, показанные на фиг. 2. Датчик или другое устройство автономного транспортного средства может сохранять информацию датчика в памяти, такой как память 1340, показанная на фиг. 1, автономного транспортного средства и AVOMC 5100, считывающего информацию датчика из памяти.
[0111] Идентификация данных оперативной окружающей обстановки может включать в себя идентификацию информации, указывающей один или более аспектов оперативной окружающей обстановки, из данных транспортной сети транспортных средств. Например, AVOMC 5100 может считывать или иным образом принимать данные транспортной сети транспортных средств, указывающие, что автономное транспортное средство приближается к пересечению, или иным образом описывать геометрию или конфигурацию транспортной сети транспортных средств, ближайших к автономному транспортному средству, например в пределах 300 метров от автономного транспортного средства.
[0112] Идентификация данных оперативной окружающей обстановки на этапе 5110 может включать в себя идентификацию информации, указывающей один или более аспектов оперативной окружающей обстановки от удаленного транспортного средства или другого удаленного устройства, внешнего по отношению к автономному транспортному средству. Например, автономное транспортное средство может принимать от удаленного транспортного средства через беспроводную линию электронной связи сообщение удаленного транспортного средства, включающее в себя информацию удаленного транспортного средства, указывающую информацию геопространственного состояния удаленного транспортного средства для удаленного транспортного средства, информацию кинематического состояния удаленного транспортного средства для удаленного транспортного средства, или и то и другое.
[0113] Идентификация данных оперативной окружающей обстановки может включать в себя идентификацию информации, указывающей один или более аспектов оперативной окружающей обстановки, из данных маршрута, представляющих идентифицированный маршрут для автономного транспортного средства. Например, AVOMC 5100 может считывать или иным образом принимать данные транспортной сети транспортных средств, представляющие идентифицированный маршрут, такой как маршрут, идентифицированный в ответ на ввод пользователя, для автономного транспортного средства.
[0114] AVOMC 5100 и блоки 5200 контроля оперативной окружающей обстановки могут осуществлять связь для идентификации информации оперативной окружающей обстановки, как указано на этапах 5110, 5112 и 5210. В качестве альтернативы или в дополнение блоки 5200 контроля оперативной окружающей обстановки могут принимать данные оперативной окружающей обстановки от другого компонента автономного транспортного средства, например, от датчика автономного транспортного средства или от другого блока 5200 контроля оперативной окружающей обстановки, или блоки 5200 контроля оперативной окружающей обстановки могут считывать данные оперативной окружающей обстановки из памяти автономного транспортного средства.
[0115] AVOMC 5100 может обнаруживать или идентифицировать один или более различных вариантов работы транспортного средства на этапе 5120, например, на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки, идентифицированными на этапе 5110.
[0116] AVOMC 5100 может инстанцировать экземпляр SSOCEM 5300 на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки на этапе 5130, например, в ответ на идентификацию отдельного варианта работы транспортного средства на этапе 5120. Хотя один экземпляр 5300 SSOCEM показан на фиг. 5, AVOMC 5100 может инстанцировать множество экземпляров SSOCEM 5300 на основе одного или более аспектов оперативной окружающей обстановки, представленных данными оперативной окружающей обстановки, идентифицированными на этапе 5110, причем каждый экземпляр 5300 SSOCEM соответствует соответственному отдельному варианту работы транспортного средства, обнаруженному на этапе 5120, или комбинации отдельного внешнего объекта, идентифицированного на этапе 5110, и соответственного отдельного варианта работы транспортного средства, обнаруженного на этапе 5120. Инстанцирование экземпляра SSOCEM 5300 на этапе 5130 может включать в себя отправку данных оперативной окружающей обстановки, представляющих оперативную окружающую обстановку для автономного транспортного средства, на экземпляр 5300 SSOCEM, как указано на этапе 5132. Экземпляр 5300 SSOCEM может принимать данные оперативной окружающей обстановки, представляющие оперативную окружающую обстановку для автономного транспортного средства, или один или более ее аспектов, на этапе 5310. Инстанцирование экземпляра SSOCEM 5300 на этапе 5130 может включать в себя идентификацию модели, такой как первичная модель или вторичная модель, отдельного варианта работы транспортного средства, инстанцирование экземпляра модели, определение решения или политики, соответствующей модели, инстанцирование экземпляра решения или политики, или их комбинации.
[0117] Блоки 5200 контроля оперативной окружающей обстановки могут включать в себя блок контроля блокировки, такой как блок 4210 контроля блокировки, показанный на фиг. 4, который может определять соответственную вероятность доступности (POA) или соответственную вероятность блокировки, на этапе 5220 для одной или более частей транспортной сети транспортных средств, таких как части транспортной сети транспортных средств, ближайших к автономному транспортному средству, которые могут включать в себя части транспортной сети транспортных средств, соответствующие ожидаемому маршруту автономного транспортного средства, такому как ожидаемый путь, идентифицированный на основе текущего маршрута автономного транспортного средства. Блок контроля блокировки может отправлять вероятности доступности, идентифицированные на этапе 5220, в экземпляр 5300 SSOCEM на этапе 5222. Альтернативно или в дополнение блок контроля блокировки может хранить вероятности доступности, идентифицированные на этапе 5220, в памяти автономного транспортного средства. Хотя это явно не показано на фиг. 5, блок контроля блокировки может отправлять вероятности доступности, идентифицированные на этапе 5220, в AVOMC 5100 на этапе 5222 в дополнение или в качестве альтернативы отправке вероятностей доступности в экземпляр 5300 SSOCEM. Экземпляр SSOCEM 5300 может получить вероятности доступности на этапе 5320.
[0118] Экземпляр 5300 SSOCEM может генерировать или идентифицировать действие-кандидат управления транспортным средством на этапе 5330. Например, экземпляр 5300 SSOCEM может генерировать или идентифицировать действие-кандидат управления транспортным средством на этапе 5330 в ответ на прием данных оперативной окружающей обстановки на этапе 5310, прием данных вероятности доступности на этапе 5320 или обоих. Например, экземпляр решения или политики, инстанцированный на этапе 5310 для модели отдельного варианта работы транспортного средства, может выводить действие-кандидат управления транспортным средством на основе данных оперативной окружающей обстановки, данных вероятности доступности или обоих. Экземпляр 5300 SSOCEM может отправлять действие-кандидат управления транспортным средством, идентифицированное на этапе 5330, в AVOMC 5100 на этапе 5332. В качестве альтернативы или в дополнение, экземпляр 5300 SSOCEM может сохранять действие-кандидат управления транспортным средством, идентифицированное на этапе 5330, в памяти автономного транспортного средства.
[0119] AVOMC 5100 может принимать действие-кандидат управления транспортным средством на этапе 5140. Например, AVOMC 5100 может принимать действие-кандидат управления транспортным средством от экземпляра 5300 SSOCEM на этапе 5140. В качестве альтернативы или в дополнение AVOMC 5100 может считывать действие-кандидат управления транспортным средством из памяти автономного транспортного средства.
[0120] AVOMC 5100 может подтвердить действие-кандидат управления транспортным средством или иным образом идентифицировать действие-кандидат управления транспортным средством в качестве действия управления транспортным средством для управления автономным транспортным средством, чтобы проехать по транспортной сети транспортных средств, на этапе 5150. Подтверждение действия-кандидата управления транспортным средством на этапе 5150 может включать в себя определение, проезжать ли по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством.
[0121] AVOMC 5100 может управлять или может предоставлять идентифицированное действие управления транспортным средством другому блоку управления транспортным средством, автономному транспортному средству для проезда по транспортной сети транспортных средств или его части на этапе 5160 в соответствии с действием управления транспортным средством, идентифицированным на этапе 5150.
[0122] AVOMC 5100 может идентифицировать оперативную окружающую обстановку или ее аспект автономного транспортного средства на этапе 5170. Идентификация оперативной окружающей обстановки или ее аспекта автономного транспортного средства на этапе 5170 может быть аналогична идентификации оперативной окружающей обстановки автономного транспортного средства на этапе 5110 и может включать в себя обновление ранее идентифицированных данных оперативной окружающей обстановки.
[0123] AVOMC 5100 может определять или обнаруживать, разрешен или не разрешен отдельный вариант работы транспортного средства на этапе 5180. Например, AVOMC 5100 может принимать информацию оперативной окружающей обстановки непрерывно или периодически, как описано выше. AVOMC 5100 может оценивать данные оперативной окружающей обстановки, чтобы определить, разрешен ли вариант работы с отдельным транспортным средством.
[0124] AVOMC 5100 может определить, что отдельный вариант работы транспортного средства, соответствующий экземпляру 5300 SSOCEM, не разрешен на этапе 5180, AVOMC 5100 может отправить данные оперативной окружающей обстановки, идентифицированные на этапе 5170, в экземпляры 5300 SSOCEM, как указано на этапе 5185, и деинстанцирование экземпляра 5300 SSOCEM на этапе 5180 может быть опущено или отличаться.
[0125] AVOMC 5100 может определять, что отдельный вариант работы транспортного средства разрешен на этапе 5180, и может деинстанцировать на этапе 5190 экземпляры SSOCEM 5300, соответствующие варианту работы отдельного транспортного средства, определенному как разрешенный на этапе 5180. Например, AVOMC 5100 может идентифицировать отдельный набор рабочих условий, формирующих отдельный вариант работы транспортного средства для автономного транспортного средства на этапе 5120, может определять, что одно или более из рабочих условий истекло, или имеет вероятность влияния на работу автономного транспортного средства ниже заданного порогового значения на этапе 5180, и может деинстанцировать соответствующий экземпляр SSOCEM 5300.
[0126] Хотя это явно не показано на фиг. 5, AVOMC 5100 может непрерывно или периодически повторять идентификацию или обновление данных оперативной окружающей обстановки на этапе 5170, определяя, разрешен ли отдельный вариант работы транспортного средства на этапе 5180, и, в ответ на определение того, что отдельный вариант работы транспортного средства не разрешен на этапе 5180, отправлять данные оперативной окружающей обстановки, идентифицированные на этапе 5170 в экземпляры SSOCEM 5300, как указано на этапе 5185, до тех пор, пока определение того, разрешен ли отдельный вариант работы транспортного средства на этапе 5180, не включает в себя определение того, что отдельный вариант работы транспортного средства разрешен.
[0127] Фиг. 6-8 показывают примеры, которые включают в себя варианты при слиянии. В варианте при слиянии часть транспортной сети транспортных средств включает в себя две или более полос движения, таких как две соседние полосы движения от первой дороги или первую полосу движения от первой дороги и вторую полосу движения от второй дороги, которые пересекаются и объединяются на слиянии-пересечении, чтобы сформировать последующую, относительно направления движения полос движения, объединенную полосу движения. Автономное транспортное средство может пройти вариант при слиянии путем проезда на слиянии-пересечении на последующую объединенную полосу движения. Варианты при слиянии могут быть подобны вариантам при смене полосы движения, за исключением случаев, описанных здесь, или иным образом понятным из контекста. Например, вариант при слиянии может быть ассоциирован с заданным фиксированным геопространственным местоположением (слиянием-пересечением), которое может быть основано на заданных аспектах транспортной сети транспортных средств, и для проезда по части транспортной сети транспортных средств, что включает в себя вариант при слиянии, действие управления транспортным средством, которое исключает слияние с последующей объединенной полосой движения, может быть недоступно. Вариант при смене полосы движения может быть ассоциирован с относительными местоположениями, и для проезда по части транспортной сети транспортных средств, что включает в себя вариант при смене полосы движения, может быть доступно действие управления транспортным средством, которое опускает смену полосы движения. В другом примере вероятности действий удаленного транспортного средства для варианта при слиянии могут отличаться от аналогичного варианта при смене полосы движения. Пример варианта при слиянии, в котором две соседние полосы движения заканчиваются, а последующая объединенная полоса движения начинается на слиянии-пересечении, показан на фиг. 6. Пример варианта при слиянии, в котором первая соседняя полоса движения заканчивается, а вторая соседняя полоса движения становится следующей объединенной полосой движения на слиянии-пересечении, показан на фиг. 7. Пример варианта при слиянии, в котором полоса движения первой дороги становится следующей объединенной полосой движения, а полоса движения второй дороги заканчивается на слиянии-пересечении, показана на фиг. 8. Другие конфигурации транспортной сети транспортных средств могут использоваться для вариантов при слиянии.
[0128] Фиг. 6 является примером части сцены 6000 слияния транспортной сети транспортных средств, включающей в себя вариант при слиянии в соответствии с вариантами осуществления этого раскрытия. Управление работой автономного транспортного средства может включать в себя автономное транспортное средство 6100, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, эксплуатирующее систему управления работой автономного транспортного средства, такую как система 5000 управления работой автономного транспортного средства, показанная на фиг. 5, включающая в себя SSOCEM при слиянии, такой как SSOCEM 5410 при слиянии, показанный на фиг. 5, который может включать в себя модель варианта управления работой автономного транспортного средства, которое включает в себя автономное транспортное средство 6100, проезжающее по части транспортной сети транспортных средств по первой дороге 6200 в первой полосе 6210 движения, приближающейся к слиянию-пересечению 6300 (вариант при слиянии). Для простоты и ясности часть транспортной сети транспортных средств, соответствующая сцене 6000 слияния, показанной на фиг. 6 ориентирована на север сверху и восток справа.
[0129] Часть транспортной сети транспортных средств, соответствующая сцене 6000 слияния, показанной на фиг. 6 включает в себя автономное транспортное средство 6100, движущееся на север по сегменту дороги в первой полосе 6210 движения первой дороги 6200, прилегающей ко второй полосе 6400 движения первой дороги 6200, приближающейся к слиянию-пересечению 6300. Первая полоса 6210 движения и вторая полоса 6400 движения объединяются на слиянии-пересечении 6300, образуя последующую объединенную полосу 6500 движения первой дороги 6200. Хотя первая полоса 6210 движения, вторая полоса 6400 движения и объединенная полоса 6500 движения показаны отдельно, соответствующие участки первой полосы 6210 движения, второй полосы 6400 движения и объединенной полосы 6500 движения могут перекрываться на слиянии-пересечении 6300. Первое удаленное транспортное средство 6600 проезжает по второй полосе 6400 движения, приближаясь к слиянию-пересечению 6300. Второе удаленное транспортное средство 6700 проезжает по следующей объединенной полосе 6500 движения впереди автономного транспортного средства 6100. Третье удаленное транспортное средство 6800 проезжает по первой полосе 6210 движения позади автономного транспортного средства 6100.
[0130] Система управления работой автономного транспортного средства может работать непрерывно или периодически, например, в каждом временном местоположении в последовательности временных местоположений. Первое, последовательно самое раннее, временное местоположение из последовательности временных местоположений может соответствовать работе автономного транспортного средства, которая может включать в себя проезд по части транспортной сети транспортных средств автономного транспортного средства или прием или идентификацию идентифицированного маршрута для проезда по транспортной сети транспортных средств автономного транспортного средства. Для простоты и ясности соответственное геопространственное местоположение автономного транспортного средства 6100, первого удаленного транспортного средства 6600, второго удаленного транспортного средства 6700 и третьего удаленного транспортного средства 6800 показано в соответствии с временным местоположением из последовательности временных местоположений, соответствующих пространственному местоположению в транспортной сети транспортных средств вблизи слияния-пересечения 6300. Хотя это описано со ссылкой на последовательность временных местоположений для простоты и ясности, каждый блок системы управления работой автономного транспортного средства может работать на любой частоте, работа соответствующих блоков может быть синхронизированной или несинхронизированной, и операции могут выполняться одновременно с одним или более частями одного или более временных местоположений. Для простоты и ясности соответственные описания одного или более временных местоположений, таких как временные местоположения из временных местоположений, описанных здесь, могут быть опущены в этом раскрытии.
[0131] Система управления работой автономного транспортного средства автономного транспортного средства 6100 может управлять блоком контроля слияния, таким как блок 5310 контроля слияния, показанный на фиг. 5, которая может включать в себя инстанцирование блока контроля слияния. Блок контроля слияния может обрабатывать или оценивать данные транспортной сети транспортных средств, такие как картографические данные, данные датчиков или их комбинация, представляющие часть транспортной сети транспортных средств, такую как часть, соответствующая идентифицированному маршруту для автономного транспортного средства 6100, часть, пространственно близкую к автономному транспортному средству 6100, или ожидаемый путь для автономного транспортного средства 6100, или их комбинацию. Например, идентифицированный маршрут для автономного транспортного средства 6100, ожидаемый путь для автономного транспортного средства 6100 или оба могут включать или могут быть ближе к слиянию-пересечению 6300, и блок контроля слияния может идентифицировать вариант-кандидат при слиянии, соответствующий автономному транспортному средству 6100, проезжающему по части транспортной сети транспортных средств, включая слияние-пересечение 6300. В другом примере датчики автономного транспортного средства 6100 могут обнаруживать информацию, соответствующую оперативной окружающей обстановке автономного транспортного средства 6100, такую как информация, указывающая, что геометрия транспортной сети транспортных средств вдоль ожидаемого пути для автономного транспортного средства включает в себя слияние-пересечение, информацию, соответствующую одному или более удаленным транспортным средствам 6600, 6700, 6800 или их комбинацию.
[0132] Блок контроля слияния может идентифицировать или генерировать информацию оперативной окружающей обстановки, представляющую оперативную окружающую обстановку или ее аспект, автономного транспортного средства 6100, что может включать в себя ассоциирование информации датчика с удаленными транспортными средствами 6600, 6700, 6800 и может выводить информацию оперативной окружающей обстановки, которая может включать в себя информацию, представляющую удаленные транспортные средства 6600, 6700, 6800, информацию, идентифицирующую вариант-кандидат при слиянии, или оба, для контроллера управления работой автономного транспортного средства.
[0133] Система управления работой автономного транспортного средства автономного транспортного средства 6100 может управлять блоком контроля блокировки, таким как блок 5200 контроля блокировки, показанный на фиг. 5, что может включать в себя инстанцирование блока контроля блокировки. Блок контроля блокировки может генерировать вероятность информации о доступности, указывающую соответствующие вероятности доступности или соответствующую вероятность блокировки, для одной или более областей или частей транспортной сети транспортных средств. Например, блок контроля блокировки может определять ожидаемый путь 6900 для автономного транспортного средства 6100, ожидаемый путь 6910 для первого удаленного транспортного средства 6600 и вероятность доступности для области или части транспортной сети транспортных средств, ближайшей к точке сходимости между ожидаемым путем 6900 для автономного транспортного средства и ожидаемым путем 6910 для первого удаленного транспортного средства 6600, которая может соответствовать слиянию-пересечению 6300.
[0134] Контроллер управления работой автономного транспортного средства может обнаруживать или идентифицировать вариант при слиянии, например, на основе оперативной окружающей обстановки, представленной информацией оперативной окружающей обстановки, которая может включать в себя информацию оперативной окружающей обстановки, выводимую блоком контроля слияния. Например, контроллер управления работой автономного транспортного средства может идентифицировать вариант-кандидат при слиянии как вариант при слиянии.
[0135] Контроллер управления работой автономного транспортного средства может инстанцировать один или более экземпляров SSOCEM при слиянии и может отправлять или иным образом предоставлять информацию оперативной окружающей обстановки экземплярам SSOCEM при слиянии в ответ на обнаружение или идентификацию варианта при слиянии, включающего в себя первое удаленное транспортное средство 6600. Кроме того, или в качестве альтернативы, контроллер управления работой автономного транспортного средства может отправлять или иным образом предоставлять информацию оперативной окружающей обстановки, такую как новая или обновленная информация оперативной окружающей обстановки, одному или более ранее инстанцированным или действующим экземплярам SSOCEM при слиянии, в ответ на обнаружение или идентификацию варианта при слиянии, включающего в себя первое удаленное транспортное средство 6600.
[0136] Удаленные транспортные средства, такие как одно или более из удаленных транспортных средств 6600, 6700, 6800, проезжающих по части транспортной сети транспортных средств вблизи слияния-пересечения, которые могут влиять на работу автономного транспортного средства, проезжающего по слиянию-пересечению, могут быть идентифицированы как относящиеся к слиянию удаленные транспортные средства. Каждый экземпляр SSOCEM при слиянии может соответствовать соответственному относящемуся к слиянию удаленному транспортному средству 6600, 6700, 6800.
[0137] Инстанцирование и обновление экземпляра SSOCEM при слиянии может включать в себя предоставление информации оперативной окружающей обстановки или ее части, такой как информация датчика или вероятности доступности, соответственному экземпляру SSOCEM при слиянии, например, путем отправки информации оперативной окружающей обстановки или ее части соответственному экземпляру SSOCEM при слиянии или сохранения информации оперативной окружающей обстановки или ее части для доступа соответственного экземпляра SSOCEM при слиянии. Соответственный экземпляр SSOCEM при слиянии может принимать или иным образом получать доступ к информации оперативной окружающей обстановки, соответствующей варианту при слиянии.
[0138] SSOCEM при слиянии может включать в себя модель варианта при слиянии, такую как модель POMDP варианта при слиянии. Модель POMDP варианта при слиянии может задавать набор (S) состояний, набор действий (A), набор наблюдений (Ω), набор вероятностей (T) смены состояния, набор условных вероятностей (O) наблюдения, функцию (R) вознаграждения или их комбинацию, соответствующие варианту при слиянии, которая может быть выражена как кортеж
[0139] Для простоты и ясности модель варианта при слиянии описана с использованием первого удаленного транспортного средства 6600 в качестве относящегося к слиянию удаленного транспортного средства, однако другое удаленное транспортное средство, такое как второе удаленное транспортное средство 6700 или третье удаленное транспортное средство 6800, может использоваться в качестве относящегося к слиянию удаленного транспортного средства.
[0140] Примеры факторов состояния, которые могут быть включены в пространство (S) состояний для модели POMDP варианта при слиянии, могут включать в себя фактор (








[0141] Фактор (
[0142] Фактор (
[0143] Фактор (
[0144] Фактор (

[0145] Фактор (
[0146] Фактор (
[0147] Фактор (
[0148] Фактор (
[0149] Примеры факторов действия, которые могут быть включены в пространство (A) действий для модели POMDP варианта при слиянии, могут включать в себя фактор (Aℓ) действия для действия управления транспортным средством, фактор (Av) действия модификатора скорости для действия управления транспортным средством или оба, которое может быть выражено как A = Aℓ

[0150] Фактор (Aℓ) действия для действия управления транспортным средством может представлять действие управления транспортным средством и может иметь значение из заданного набора значений, такого как {поддержание, край, продолжение}. Например, фактор (Aℓ) действия для действия управления транспортным средством «поддержание» может указывать, что автономное транспортное средство проезжает по непосредственно следующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством «поддержание», которое может соответствовать поддержанию текущего значения фактора (
[0151] Фактор (Av) действия модификатора скорости для действия управления транспортным средством может представлять собой модификатор скорости для действия управления транспортным средством, указанного фактором (Aℓ) действия для действия управления транспортным средством, и может иметь значение из заданного набора значений, такого как {замедление, поддержание, ускорение}. Например, фактор (Av) действия модификатора скорости для действия управления транспортным средством «замедление» может указывать, что автономное транспортное средство проезжает по непосредственно следующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством, соответствующим фактору (Aℓ) действия для действия управления транспортным средством и с замедлением, например, на заданную величину или до заданной скорости, которое может быть указано в соответствии с фактором (Av) действия модификатора скорости для действия управления транспортным средством. Фактор (Av) действия модификатора скорости для действия управления транспортным средством «поддержание» может указывать, что автономное транспортное средство проезжает по непосредственно следующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством, соответствующим фактору (Aℓ) действия для действия управления транспортным средством, и поддерживает текущую скорость. Фактор (Av) действия модификатора скорости для действия управления транспортным средством «ускорение», может указывать, что автономное транспортное средство проезжает по непосредственно следующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством, соответствующим фактору (Aℓ) действия для действия управления транспортным средством, и с ускорением, например, на заданную величину или до заданной скорости, которая может быть указана в соответствии с фактором (Av) действия модификатора скорости для действия управления транспортным средством.
[0152] Примеры факторов наблюдения, которые могут быть включены в пространство (Ω) наблюдений для модели POMDP варианта при слиянии, могут включать в себя фактор (







[0153] Фактор (
[0154] Наблюдение (
[0155] Фактор (
[0156] Фактор (
[0157] Фактор (
[0158] Фактор (
[0159] Примером вероятности смены состояния из вероятностей (T) смены состояния для модели POMDP варианта при слиянии является вероятность того, что удаленное транспортное средство 6600 замедлится так, что часть транспортной сети транспортных средств впереди или перед удаленным транспортным средством 6600 относительно траектории удаленного транспортного средства 6600 будет доступна для автономного транспортного средства 6100 для проезда, чтобы перейти в последующую объединенную полосу 6500 движения. Другим примером вероятности смены состояния для модели POMDP варианта при слиянии является вероятность того, что удаленное транспортное средство 6600 ускорится так, что часть транспортной сети транспортных средств, после или позади удаленного транспортного средства 6600 относительно траектории движения удаленного транспортного средства 6600 будет доступна для автономного транспортного средства 6100 для проезда, чтобы перейти в последующую объединенную полосу 6500 движения. Другим примером вероятности смены состояния для модели POMDP варианта при слиянии является вероятность того, что на проезд по транспортной сети транспортных средств автономного транспортного средства 6100 влияет препятствие впереди (не показано явно), такое как удаленное транспортное средство на ожидаемом пути для автономного транспортного средства и имеющее скорость, которая находится в пределах, например, меньше, скорости автономного транспортного средства. Другим примером вероятности смены состояния для модели POMDP варианта при слиянии является вероятность того, что удаленное транспортное средство 6600 проезжает в последующую объединенную полосу 6500 движения впереди или перед автономным транспортным средством 6100. Другим примером вероятности смены состояния для модели POMDP варианта при слиянии является вероятность того, что имманентность для проезда из первой полосы движения в последующую объединенную полосу движения пройдет заданное пороговое значение имманентности. Другим примером вероятности смены состояния для модели POMDP варианта при слиянии является вероятность того, что удаленное транспортное средство (не показано явно) впереди автономного транспортного средства 6100 в соседней полосе движения замедлится, так что часть транспортной сети транспортных средств, ранее доступная для проезда автономного транспортного средства 6100 будет недоступна для проезда автономного транспортного средства 6100.
[0160] Примером условной вероятности наблюдения из условных вероятностей (O) наблюдения является вероятность неопределенности, соответствующая фактору (
[0161] Функция (R) вознаграждения может определять соответственное положительное или отрицательное (стоимостное) значение, которое может быть начислено для каждой комбинации состояния и действия, которое может представлять ожидаемое значение автономного транспортного средства, проезжающего по транспортной сети транспортных средств из соответствующего состояния в соответствии с соответствующим действием управления транспортным средством в последующее состояние, которое может быть выражено как
[0162] Инстанцирование экземпляра SSOCEM при слиянии может включать в себя идентификацию решения или политики для модели варианта работы транспортного средства при слиянии из SSOCEM при слиянии. Идентификация решения или политики для модели варианта работы транспортного средства при слиянии из SSOCEM при слиянии может включать в себя решение модели SSOCEM при слиянии. Инстанцирование экземпляра SSOCEM при слиянии может включать инстанцирование экземпляра решения или политики.
[0163] Экземпляр решения SSOCEM при слиянии может генерировать действие-кандидат управления транспортным средством, такое как «поддержание», «край» или «продолжение», на основе соответственного смоделированного варианта и соответствующей информации оперативной окружающей обстановки и может выводить соответственное действие-кандидат управления транспортным средством контроллеру управления работой автономного транспортного средства, например, посредством отправки соответственного действия-кандидата управления транспортным средством в контроллер управления работой автономного транспортного средства или сохранения соответственного действия-кандидата управления транспортным средством для доступа контроллера управления работой автономного транспортного средства.
[0164] Контроллер управления работой автономного транспортного средства может принимать действия-кандидаты управления транспортным средством от соответственных инстанцированных экземпляров SSOCEM при слиянии и может идентифицировать действие управления транспортным средством на основе принятых действий-кандидатов управления транспортным средством для управления автономным транспортным средством 6100 в соответствующем временном местоположении и может управлять автономным транспортным средством для проезда по транспортной сети транспортных средств или ее части в соответствии с идентифицированным действием управления транспортным средством.
[0165] Контроллер управления работой автономного транспортного средства может определять, истек ли один или более из обнаруженных вариантов работы обнаруженного транспортного средства, и, в ответ на определение, что вариант работы транспортного средства при слиянии истек, может деинстанцировать соответствующие экземпляры SSOCEM при слиянии.
[0166] Фиг. 7 является схемой другого примера сцены 7000 слияния, включающей в себя вариант при слиянии в соответствии с вариантами осуществления этого раскрытия. Управление работой автономного транспортного средства может включать в себя автономное транспортное средство 7100, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, эксплуатирующее систему управления работой автономного транспортного средства, такую как система 5000 управления работой автономного транспортного средства, показанная на фиг. 5, включающая в себя SSOCEM при слиянии, такой как SSOCEM 5410 при слиянии, показанный на фиг. 5, который может включать в себя модель варианта управления работой автономного транспортного средства, которая включает в себя автономное транспортное средство 7100, проезжающее по части транспортной сети транспортных средств по первой дороге 7200 в первой полосе 7210 движения, приближающейся к слиянию-пересечению 7300 (вариант при слиянии). Сцена 7000 слияния, показанная на фиг. 7 может быть аналогична сцене 6000 слияния, показанной на фиг. 6, за исключением случаев, описанных в настоящем документе или иным образом понятных из контекста.
[0167] Часть транспортной сети транспортных средств, соответствующая сцене 7000 слияния, показанной на фиг. 7 включает в себя автономное транспортное средство 7100, движущееся на север вдоль сегмента дороги в первой полосе 7210 движения первой дороги 7200, примыкающей ко второй полосе 7220 движения первой дороги 7200, приближающейся к слиянию-пересечению 7300. Первая полоса 7210 движения сливается со второй полосой 7220 и заканчивается на слиянии-пересечении 7300. Вторая полоса 7220 движения становится следующей объединенной полосой 7400 движения первой дороги 7200 на слиянии-пересечении 7300. Хотя первая полоса 7210 движения, вторая полоса 7220 движения и последующая объединенная полоса 7400 движения показаны отдельно, соответственные участки первой полосы 7210 движения, второй полосы 7220 движения и последующей объединенной полосы 7400 движения могут накладываться друг на друга на слиянии-пересечении 7300. Первое удаленное транспортное средство 7500 проезжает по второй полосе 7220 движения, приближаясь к слиянию-пересечению 7300. Второе удаленное транспортное средство 7600 проезжает по следующей объединенной полосе 7400 движения впереди автономного транспортного средства 7100. Третье удаленное транспортное средство 7700 проезжает по первой полосе 7210 движения позади автономного транспортного средства 7100.
[0168] Хотя автономное транспортное средство 7100 показано на первой полосе 7210 движения, автономное транспортное средство может проезжать по второй полосе 7220 движения, приближаясь к слиянию-пересечению 7300 (не показано). Хотя первое удаленное транспортное средство 7500 показано во второй полосе 7220 движения на фиг. 7, первое удаленное транспортное средство может проезжать по первой полосе 7210 движения, приближаясь к слиянию-пересечению 7300 (не показано).
[0169] Фиг. 8 является схемой другого примера сцены 8000 слияния, включающей в себя вариант при слиянии в соответствии с вариантами осуществления этого раскрытия. Управление работой автономного транспортного средства может включать в себя автономное транспортное средство 8100, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, эксплуатирующее систему управления работой автономного транспортного средства, такую как система 5000 управления работой автономного транспортного средства, показанная на фиг. 5, включающая в себя SSOCEM при слиянии, такой как SSOCEM 5410 при слиянии, показанный на фиг. 5, который может включать в себя модель варианта управления работой автономного транспортного средства, которая включает в себя автономное транспортное средство 8100, проезжающее по части транспортной сети транспортных средств вдоль первой дороги 8200 в первой полосе 8210 движения, приближающейся к слиянию-пересечению 8300 (вариант при слиянии). Сцена 8000 слияния, показанная на фиг. 8 может быть аналогична сцене 6000 слияния, показанной на фиг. 6, за исключением случаев, описанных в настоящем документе или иным образом понятных из контекста.
[0170] Часть транспортной сети транспортных средств, соответствующая сцене 8000 слияния, показанной на фиг. 8 включает в себя автономное транспортное средство 8100, движущееся на север вдоль сегмента дороги в первой полосе 8210 движения первой дороги 8200, приближающейся к слиянию-пересечению 8300. Вторая дорога 8400, включающая в себя вторую полосу 8410 движения, сливается с первой дорогой 8100 на слиянии-пересечении 8300. Первая полоса 8210 движения и вторая полоса 8410 движения объединяются на слиянии-пересечении 8300, образуя последующую объединенную полосу 8500 движения первой дороги 8200. Хотя первая полоса 8210 движения, вторая полоса 8400 движения и объединенная полоса 8500 движения показаны отдельно, соответственные участки первой полосы 8210 движения, второй полосы 8400 движения и объединенной полосы 8500 движения могут накладываться друг на друга на слиянии-пересечении 8300. Первое удаленное транспортное средство 8600 проезжает по второй полосе 8410 движения, приближаясь к слиянию-пересечению 8300. Второе удаленное транспортное средство 8700 проезжает по последующей объединенной полосе 8500 движения впереди автономного транспортного средства 8100. Третье удаленное транспортное средство 8800 проезжает по первой полосе 8210 движения позади автономного транспортного средства 8100.
[0171] Хотя автономное транспортное средство 8100 показано в первой полосе 8210 движения, автономное транспортное средство может проезжать по второй полосе 8410 движения, приближаясь к слиянию-пересечению 8300 (не показано). Хотя первое удаленное транспортное средство 8600 показано во второй полосе 8410 движения на фиг. 8, первое удаленное транспортное средство может проезжать по первой полосе 8210 движения, приближаясь к слиянию-пересечению 8300 (не показано).
[0172] Хотя это не показано на фиг. 6-8, дорога объединенной полосы движения может включать в себя смежную полосу движения, смежную с объединенной полосой движения, удаленной от второй полосы движения, в направлении движения первой полосы движения, и автономное транспортное средство может выполнять действие управления транспортным средством при смене полосы движения на соседнюю полосу движения.
[0173] Фиг. 9 является схемой примера сцены 9000 обхода препятствия, включающей в себя вариант при обходе препятствия в соответствии с вариантами осуществления этого раскрытия. Управление работой автономного транспортного средства может включать в себя автономное транспортное средство 9100, такое как транспортное средство 1000, показанное на фиг. 1, одно из транспортных средств 2100/2110, показанных на фиг. 2, полуавтономное транспортное средство или любое другое транспортное средство, реализующее автономное вождение, эксплуатирующее систему управления работой автономного транспортного средства, такую как система 5000 управления работой автономного транспортного средства, показанная на фиг. 5, включающая в себя SSOCEM при обходе препятствия, такой как SSOCEM 5420 при обходе препятствия, показанный на фиг. 5, который может включать в себя модель варианта управления работой автономного транспортного средства, которая включает в себя автономное транспортное средство 9100, которое проезжает по части транспортной сети транспортных средств по первой дороге 9200 движения по первой полосе 9210 движения, приближающейся к препятствию 9300 (вариант при обходе препятствия). Для простоты и ясности часть транспортной сети транспортных средств, соответствующая сцене 9000 обхода препятствия, показанной на фиг. 9, ориентирована на север сверху и восток справа. Варианты при обходе препятствия могут быть аналогичны вариантам при смене полосы движения или вариантам слияния, за исключением случаев, описанных здесь, или иным образом понятным из контекста. Например, вариант при обходе препятствия включает в себя проезд по части встречной полосы движения транспортной сети транспортных средств.
[0174] Часть транспортной сети транспортных средств, соответствующая сцене 9000 обхода препятствия, показанной на фиг. 9, включает в себя автономное транспортное средство 9100, движущееся на север вдоль сегмента дороги в первой полосе 9210 движения первой дороги 9200 движения, прилегающей к встречной полосе 9400 движения, приближаясь к препятствию 9300. Препятствием 9300 может быть, например, медленно движущееся или стоящее удаленное транспортное средство (как показано) или любой другой объект или препятствие, преграждающее первую полосу 9210 движения, например, участок строительный участок, пешеходы, упавшее дерево или тому подобное. Встречное удаленное транспортное средство 9500 проезжает по встречной полосе 9400 движения. Заднее удаленное транспортное средство 9600 проезжает по первой полосе 9210 движения позади автономного транспортного средства 9100. Части транспортной сети транспортных средств обозначены с использованием овалов пунктирной линии, таких как текущая часть 9700 текущей полосы 9200 движения, встречная часть 9710 встречной полосы 9400 движения и целевая часть 9720 текущей полосы 9200 движения. Ожидаемый путь 9800 для автономного транспортного средства 9100 указан пунктирной линией направления. Ожидаемые пути 9810, 9820 для встречного удаленного транспортного средства обозначены пунктирными линиями. Хотя препятствие 9300 показано как неподвижное, препятствие 9300 может находиться в движении, и местоположение текущей части 9700, встречной части 9710 и целевой части 9720 может находиться относительно автономного транспортного средства 9100 и препятствия 9300.
[0175] Система управления работой автономного транспортного средства может работать непрерывно или периодически, например, в каждом временном местоположении в последовательности временных местоположений. Первое, последовательно самое раннее, временное местоположение из последовательности временных местоположений может соответствовать работе автономного транспортного средства, которая может включать в себя проезд по части транспортной сети транспортных средств автономного транспортного средства или прием или идентификацию идентифицированного маршрута для проезда по транспортной сети транспортных средств автономного транспортного средства. Для простоты и ясности соответствующее геопространственное местоположение автономного транспортного средства 9100, препятствия 9300, встречного удаленного транспортного средства 9500 и заднего удаленного транспортного средства 9600 показано в соответствии с временным местоположением из последовательности временных местоположений, соответствующих пространственному местоположению в транспортной сети транспортных средств, как показано. Хотя это описано со ссылкой на последовательность временных местоположений для простоты и ясности, каждый блок системы управления работой автономного транспортного средства может работать на любой частоте, работа соответствующих блоков может быть синхронизированной или несинхронизированной, и операции могут выполняться одновременно с одним или более частями одного или более временных местоположений. Для простоты и ясности соответствующие описания одного или более временных местоположений, таких как временные местоположения из временных местоположений, описанных здесь, могут быть опущены в этом раскрытии.
[0176] Система управления работой автономного транспортного средства автономного транспортного средства 9100 может приводить в действие блок контроля препятствия впереди, такой как блок 4260 контроля препятствия впереди, показанный на фиг. 4, что может включать в себя инстанцирование блока контроля препятствия впереди. Блок контроля препятствия впереди может обрабатывать или оценивать данные транспортной сети транспортного средства, такие как картографические данные, данные датчика или их комбинацию, представляющие часть транспортной сети транспортных средств, такую как часть, соответствующая идентифицированному маршруту для автономного транспортного средства 9100, участок, расположенный в непосредственной близости от автономного транспортного средства 9100, или ожидаемый путь для автономного транспортного средства 9100, или их комбинацию. Например, идентифицированный маршрут для автономного транспортного средства 9100, ожидаемый путь для автономного транспортного средства 9100 или оба могут включать или могут быть близкими к препятствию 9300, и блок контроля препятствия впереди может идентифицировать вариант-кандидат при обходе препятствия, соответствующий к автономному транспортному средству 9100, проезжающему по части транспортной сети транспортных средств, приближающейся к препятствию 9300. В другом примере датчики автономного транспортного средства 9100 могут обнаруживать информацию, соответствующую оперативной окружающей обстановке автономного транспортного средства 9100, такую как информация, указывающая, что транспортная сеть транспортных средств вдоль ожидаемого пути для автономного транспортного средства включает в себя препятствие 9300, информация, соответствующая препятствию 9300, информация, соответствующая встречному удаленному транспортному средству 9500, информация, соответствующая заднему удаленному транспортному средству 9600, или их комбинация.
[0177] Блок контроля препятствия впереди может идентифицировать или генерировать информацию оперативной окружающей обстановки, представляющую оперативную окружающую обстановку или ее аспект, автономного транспортного средства 9100, что может включать в себя ассоциирование информации датчика с препятствием 9300, встречным удаленным транспортным средством 9500, задним удаленным транспортным средством 9600 или их комбинацию, и может выводить информацию оперативной окружающей обстановки, которая может включать в себя информацию, представляющую препятствие 9300, встречное удаленное транспортное средство 9500, заднее удаленное транспортное средство 9600 или их комбинацию, информацию, идентифицирующую вариант-кандидат при обходе препятствия, или то и другое, контроллеру управления работой автономного транспортного средства.
[0178] Система управления работой автономного транспортного средства автономного транспортного средства 9100 может приводить в действие блок контроля блокировки, такой как блок 4210 контроля блокировки, показанный на фиг. 4, что может включать в себя инстанцирование блока контроля блокировки. Блок контроля блокировки может генерировать вероятность информации о доступности, указывающую соответственные вероятности доступности или соответствующую вероятность блокировки, для одной или более областей или частей транспортной сети транспортных средств, таких как текущая часть 9700, встречная часть 9710 и целевая часть 9720.
[0179] Контроллер управления работой автономного транспортного средства может обнаруживать или идентифицировать вариант при обходе препятствия, например, на основе оперативной окружающей обстановки, представленной информацией оперативной окружающей обстановки, которая может включать в себя информацию оперативной окружающей обстановки, выводимую блоком контроля препятствия впереди. Например, контроллер управления работой автономного транспортного средства может идентифицировать вариант-кандидат при обходе препятствия как вариант при обходе препятствия.
[0180] Контроллер управления работой автономного транспортного средства может инстанцировать один или более экземпляров SSOCEM при обходе препятствия и может отправлять или иным образом предоставлять информацию оперативной окружающей обстановки экземплярам SSOCEM при обходе препятствия в ответ на обнаружение или идентификацию варианта при обходе препятствия. Кроме того, или в качестве альтернативы, контроллер управления работой автономного транспортного средства может отправлять или иным образом предоставлять информацию оперативной окружающей обстановки, такую как новая или обновленная информация оперативной окружающей обстановки, одному или более ранее инстанцированным или действующим экземплярам SSOCEM при обходе препятствия в ответ на обнаружение или идентификацию варианта при обходе препятствия.
[0181] Инстанцирование и обновление экземпляра SSOCEM при обходе препятствия может включать в себя предоставление информации оперативной окружающей обстановки или ее части, такой как информация датчика или вероятности доступности, соответственному экземпляру SSOCEM при обходе препятствия, например, путем отправки информации оперативной окружающей обстановки или ее части соответственному экземпляру SSOCEM при обходе препятствия или сохранения информации оперативной окружающей обстановки или ее части для доступа соответственного экземпляра SSOCEM при обходе препятствия. Соответственный экземпляр SSOCEM при обходе препятствия может принимать или иным образом получать доступ к информации оперативной окружающей обстановки, соответствующей варианту при обходе препятствия.
[0182] SSOCEM при обходе препятствия может включать в себя модель варианта при обходе препятствия, такую как модель POMDP варианта при обходе препятствия. Модель POMDP варианта при обходе препятствия может задавать набор (S) состояний, набор действий (A), набор наблюдений (Ω), набор вероятностей (T) смены состояния, набор условных вероятностей (O) наблюдения, функцию (R) вознаграждения или их комбинацию, соответствующие варианту при обходе препятствия, которые могут быть выражены как кортеж
[0183] Примеры факторов состояния, которые могут быть включены в пространство (S) состояний для модели POMDP варианта при обходе препятствия, могут включать в себя фактор (






[0184] Фактор (
[0185] Фактор (
[0186] Фактор (
[0187] Фактор (
[0188] Фактор (
[0189] Фактор (
[0190] Фактор (
[0191] Пространство (A) действий может включать в себя фактор (Aℓ) действия для действия управления транспортным средством. В модель POMDP модуля обхода препятствий могут быть включены другие факторы действия. Фактор (Aℓ) действия для действия управления транспортным средствомможет представлять действие управления транспортным средством и может иметь значение из заданного набора значений, такого как {край, продолжение, возврат, безопасность}. Например, фактор (Aℓ) действия для действия управления транспортным средством «край» может указывать, что автономное транспортное средство 9100 проезжает по непосредственно последующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством «край», например, приближаясь к краю первой полосы 9200 движения, примыкающей к встречной полосе 9400 движения, или путем частичного въезда на встречную полосу 9400 движения, например на несколько дюймов, так что часть автономного транспортного средства 9100 остается на первой полосе 9200 движения. Проезд у края может уменьшить неопределенность, например, путем изменения относительной ориентации препятствий. Фактор (Aℓ) действия для действия управления транспортным средством «продолжение» может указывать, что автономное транспортное средство 9100 проезжает по непосредственно следующей части транспортной сети транспортных средств в соответствии с действием управления транспортным средством «продолжение», которое может включать в себя перемещение из текущей части 9700 через встречную часть 9710 и затем в целевую часть 9720, что может включать в себя ускорение. Фактор (Aℓ) действия для действия управления транспортным средством «возврат» может указывать, что автономное транспортное средство 9100 быстро возвращается в текущую часть 9700. Например, автономное транспортное средство 9100 может частично или полностью войти на встречную полосу 9400 движения, впоследствии определить, что вероятность безопасного проезда по встречной части 9710 к целевой части 9720 находится в пределах минимального порогового значения безопасности, и может поехать по транспортной сети транспортных средств в соответствии с действием управления транспортным средством «возврат» посредством возврата в текущую часть 9700. Фактор (Aℓ) действия для действия управления транспортным средством «безопасность» может указывать на то, что автономное транспортное средство 9100 выполняет действие управления транспортным средством «безопасность» или «предотвращение столкновения», например, посредством быстрого замедления и входа в полосу безопасности (не показана) на стороне встречной полосы 9400 движения удаленной от первой полосы 9100 движения. Например, автономное транспортное средство 9100 может частично проезжать по встречной части 9710 и может определять, что ожидаемый путь 9810 для встречного удаленного транспортного средства 9500 сходится с текущим ожидаемым путем 9900 для автономного транспортного средства 9100, вероятность безопасного проезда по части встречной полосы 9710 движения в целевую часть 9720 находится в пределах минимального порогового значения безопасности, и вероятность возврата путем возврата в текущую часть 9700 находится в пределах минимального порогового значения безопасности, и автономное транспортное средство 9100 может проезжать по транспортной сети транспортных средств в соответствии с действием управления транспортным средством «безопасность», чтобы минимизировать вероятность столкновения.
[0192] Примеры факторов наблюдения, которые могут быть включены в пространство (Ω) наблюдений для модели POMDP варианта при обходе препятствия, могут включать в себя фактор (





[0193] Фактор (
[0194] Фактор (
[0195] Фактор (
[0196] Фактор (
[0197] Фактор (
[0198] Примером вероятности смены состояния из вероятностей (T) смены состояния для модели POMDP варианта при обходе препятствия является вероятность того, что ожидаемый путь 9820 для встречного удаленного транспортного средства 9500 не содержит встречную часть 9710 встречной полосы 9400 движения и текущее местоположение для встречного удаленного транспортного средства 9500 блокирует проезд других встречных транспортных средств (не показаны) по встречному участку 9710 встречной полосы 9400 движения. Другим примером вероятности смены состояния из вероятностей (T) смены состояния для модели POMDP варианта при обходе препятствия является вероятность того, что ранее необнаруженное встречное транспортное средство (не показано) обнаружено при приближении к встречной части 9710 встречной полосы 9400 движения. Другим примером вероятности смены состояния из вероятностей (T) смены состояния для модели POMDP варианта при обходе препятствия является вероятность того, что заднее удаленное транспортное средство 9600 проезжает по текущей части 9700 текущей полосы 9200 движения, блокируя возврат автономного транспортного средства 9100 в текущую часть 9700 текущей полосы 9200 движения. Другим примером вероятности смены состояния из вероятностей (T) смены состояния для модели POMDP варианта при обходе препятствия является вероятность изменения фактора (
[0199] Примером условной вероятности наблюдения из условных вероятностей (O) наблюдения является вероятность неопределенности данных датчика, соответствующих относительному расстоянию встречного удаленного транспортного средства 9500 от автономного транспортного средства 9100. Другим примером условной вероятности наблюдения является вероятность неопределенности, соответствующая фактору (
[0200] Функция (R) вознаграждения может определять соответственное положительное или отрицательное (стоимостное) значение, которое может быть начислено для каждой комбинации состояния и действия, которое может представлять ожидаемое значение автономного транспортного средства, проезжающего по транспортной сети транспортных средств из соответствующего состояния в соответствии с соответствующим действием управления транспортным средством в последующее состояние, которое может быть выражено как R:S×A→ℝ.
[0201] Инстанцирование экземпляра SSOCEM при обходе препятствия может включать в себя идентификацию решения или политики для модели варианта работы транспортного средства при обходе препятствия из SSOCEM при обходе препятствия. Идентификация решения или политики для модели варианта работы транспортного средства при обходе препятствия из SSOCEM при обходе препятствия может включать в себя решение модели SSOCEM при обходе препятствия. Инстанцирование экземпляра SSOCEM при обходе препятствия может включать в себя инстанцирование экземпляра решения или политики.
[0202] Экземпляр решения SSOCEM при обходе препятствия может генерировать действие-кандидат управления транспортным средством, такое как «поддержание», «край» или «продолжение» на основе соответственного смоделированного варианта и соответствующей информации оперативной окружающей обстановки и может выводить соответственное действие-кандидат управления транспортным средством в контроллер управления работой автономного транспортного средства, например, путем отправки соответственного действия-кандидата управления транспортным средством в контроллер управления работой автономного транспортного средства или сохранения соответственного действия-кандидата управления транспортным средством для доступа контроллера управления работой автономного транспортного средства.
[0203] Контроллер управления работой автономного транспортного средства может принимать действия-кандидаты управления транспортным средством от соответственных инстанцированных экземпляров SSOCEM при обходе препятствия и может идентифицировать действие управления транспортным средством на основе принятых действий-кандидатов управления транспортным средством для управления автономным транспортным средством 9100 в соответствующем временном местоположении и может управлять автономным транспортным средством для проезда по транспортной сети транспортных средств или ее части в соответствии с идентифицированным действием управления транспортным средством.
[0204] Контроллер управления работой автономного транспортного средства может определять, истек ли один или более из обнаруженных вариантов работы транспортного средства, и в ответ на определение того, что вариант работы транспортного средства истек, может деинстанцировать соответствующие экземпляры SSOCEM при обходе препятствия.
[0205] В некоторых реализациях проезд по транспортной сети транспортных средств может включать в себя в ответ на прием от блока контроля оперативной окружающей обстановки транспортного средства информации оперативной окружающей обстановки, идентифицирующей вариант работы транспортного средства, инстанцирование экземпляра модуля оценки управления работой для конкретного варианта.
[0206] В некоторых реализациях вариант работы транспортного средства может быть вариантом работы транспортного средства при слиянии, проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством может включать в себя проезд из первой полосы движения в транспортной сети транспортных средств в последующую объединенную полосу движения транспортной сети транспортных средств, причем первая полоса движения и вторая полоса движения транспортной сети транспортных средств объединяются, образуя последующую объединенную полосу движения.
[0207] В некоторых реализациях проезд по транспортной сети транспортных средств может включать в себя приведение в действие блока контроля оперативной окружающей обстановки для идентификации варианта работы транспортного средства в ответ на определение, что первая полоса движения и вторая полоса движения объединяются, чтобы сформировать последующую объединенную полосу движения.
[0208] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор состояния имманентности, представляющий расстояние между текущим местоположением автономного транспортного средства и местоположением слияния-пересечения, ближайшим к последующей объединенной полосе движения.
[0209] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор состояния относительного местоположения автономного транспортного средства, представляющий местоположение автономного транспортного средства относительно текущей полосы движения автономного транспортного средства, причем текущая полоса движения является первой полосой движения или последующей объединенной полосой движения.
[0210] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор состояния неопределенности автономного транспортного средства, представляющий неопределенность, соответствующую автономному транспортному средству, имеющему текущее значение фактора состояния относительного местоположения автономного транспортного средства.
[0211] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор состояния относительной скорости автономного транспортного средства, представляющий относительную скорость автономного транспортного средства относительно заданного опорного значения скорости.
[0212] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор состояния доступности, представляющий состояние доступности части транспортной сети транспортных средств, соответствующей проезду по транспортной сети транспортных средств посредством проезда из первой полосы движения в последующую объединенную полосу движения.
[0213] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор действия для действия управления транспортным средством, представляющий действие управления транспортным средством.
[0214] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор действия модификатора скорости для действия управления транспортным средством, представляющий модификатор скорости для действия управления транспортным средством.
[0215] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения имманентности, представляющий определение, проходит ли имманентность для проезда из первой полосы движения в последующую объединенную полосу движения заданное пороговое значение имманентности.
[0216] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения относительного местоположения автономного транспортного средства, представляющий определение, указывающее изменение местоположения для автономного транспортного средства.
[0217] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения относительной скорости автономного транспортного средства, представляющий определение, указывающее изменение скорости для автономного транспортного средства.
[0218] В некоторых реализациях модель оценки управления работой для конкретного варианта может включать в себя информацию оперативной окружающей обстановки, которая может указывать удаленное транспортное средство в варианте работы транспортного средства, и модель оценки управления работой для конкретного варианта может включать в себя фактор состояния относительного местоположения удаленного транспортного средства, представляющий местоположение удаленного транспортного средства относительно текущей полосы движения удаленного транспортного средства для удаленного транспортного средства и автономного транспортного средства, при этом текущая полоса движения удаленного транспортного средства является первой полосой движения, второй полосой движения или последующей объединенной полосой движения.
[0219] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния неопределенности относительного местоположения удаленного транспортного средства, представляющий неопределенность, соответствующую удаленному транспортному средству, имеющему текущее значение фактора состояния относительного местоположения удаленного транспортного средства.
[0220] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния относительной скорости удаленного транспортного средства, представляющий относительную скорость удаленного транспортного средства относительно заданного опорного значения скорости удаленного транспортного средства.
[0221] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения относительного местоположения удаленного транспортного средства, представляющий определение, указывающее изменение местоположения для удаленного транспортного средства.
[0222] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения доступности, представляющий определение, указывающее изменение доступности для части транспортной сети транспортных средств, соответствующей проезду по транспортной сети транспортных средств, посредством проезда из первой полосы движения в последующую объединенную полосу движения.
[0223] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения относительной скорости удаленного транспортного средства, представляющий определение, указывающее изменение скорости для удаленного транспортного средства.
[0224] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния уступчивости удаленного транспортного средства, указывающую вероятность того, что удаленное транспортное средство работает так, что часть транспортной сети транспортных средств, соответствующая проезду по транспортной сети транспортных средств посредством проезда с первой полосы движения в последующую объединенную полосу доступна.
[0225] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния опережения удаленного транспортного средства, указывающую вероятность того, что удаленное транспортное средство проедет автономное транспортное средство во второй полосе движения.
[0226] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния прегражденной препятствием полосы движения, указывающую вероятность того, что текущая полоса движения автономного транспортного средства преграждена препятствием на ожидаемом пути для автономного транспортного средства.
[0227] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния слияния впереди удаленного транспортного средства, указывающую вероятность того, что удаленное транспортное средство въезжает в текущую полосу движения автономного транспортного средства перед автономным транспортным средством.
[0228] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния вторичного действия управления транспортным средством, указывающую вероятность того, что доступное расстояние для проезда по транспортной сети транспортных средств посредством проезда из первой полосы движения в последующую объединенную полосу движения проходит минимальное пороговое значение.
[0229] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния блокировки впереди удаленным транспортным средством, указывающую вероятность того, что при условии, что удаленное транспортное средство находится впереди автономного транспортного средства и в последующей объединенной полосе движения, удаленное транспортное средство изменится с неблокирующего на блокирующее.
[0230] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения неопределенности блокировки, указывающую вероятность неопределенности для доступности части транспортной сети транспортных средств, соответствующей проезду по транспортной сети транспортных средств, посредством проезда из первой полосы движения в последующую объединенную полосу движения.
[0231] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения удаленного транспортного средства, указывающую корреляцию между относительным местоположением и скоростью удаленного транспортного средства и определенным местоположением и вероятностью для удаленного транспортного средства.
[0232] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения окклюзии, указывающую вероятность того, что удаленное транспортное средство скрыто.
[0233] В некоторых реализациях вариант работы транспортного средства может быть вариантом работы транспортного средства при обходе препятствия, и модель оценки управления работой для конкретного варианта может включать в себя фактор состояния относительного местоположения автономного транспортного средства, представляющий местоположение автономного транспортного средства относительно текущей полосы движения.
[0234] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния неопределенности относительного местоположения автономного транспортного средства, представляющий неопределенность, соответствующую автономному транспортному средству, имеющему текущее значение фактора состояния относительного местоположения автономного транспортного средства.
[0235] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния препятствия впереди, представляющий текущее состояние препятствия впереди автономного транспортного средства в текущей полосе движения.
[0236] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния доступности сзади, представляющий состояние доступности части транспортной сети транспортных средств позади автономного транспортного средства в текущей полосе движения.
[0237] Модель оценки управления работой для конкретного варианта может включать в себя фактор действия для действия управления транспортным средством, представляющий действие управления транспортным средством.
[0238] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения успеха действия, представляющий определение, находится ли разница между ожидаемой оперативной окружающей обстановкой транспортного средства на основе проезда по транспортной сети транспортных средств в соответствии с ранее идентифицированным действием управления транспортным средством и текущей оперативной окружающей обстановкой транспортного средства, последующей для проезда по транспортной сети транспортных средств в соответствии с ранее идентифицированным действием управления транспортным средством, в пределах заданного порогового значения.
[0239] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения препятствия впереди, представляющий определение, указывающее изменение текущего состояния препятствия перед автономным транспортным средством.
[0240] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения доступности сзади, представляющий определение, указывающее изменение состояния доступности части транспортной сети транспортных средств позади автономного транспортного средства в текущей полосе движения.
[0241] В некоторых реализациях информация оперативной окружающей обстановки может указывать встречное удаленное транспортное средство на встречной полосе движения в варианте работы транспортного средства, и модель оценки управления работой для конкретного варианта может включать в себя фактор состояния расстояния встречного удаленного транспортного средства, представляющий расстояние встречного удаленного транспортного средства от автономного транспортного средства.
[0242] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния неопределенности местоположения встречного удаленного транспортного средства, представляющий неопределенность, соответствующую встречному удаленному транспортному средству, имеющему текущее значение фактора состояния расстояния встречного удаленного транспортного средства.
[0243] Модель оценки управления работой для конкретного варианта может включать в себя фактор состояния доступности, представляющий состояние доступности относительной части встречной полосы движения, соответствующей проезду по транспортной сети транспортных средств посредством обхода препятствия в текущей полосе движения посредством проезда по относительной части встречной полосы движения.
[0244] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения местоположения встречного удаленного транспортного средства, представляющий определение, указывающее изменение рабочего состояния встречного удаленного транспортного средства.
[0245] Модель оценки управления работой для конкретного варианта может включать в себя фактор наблюдения доступности, представляющий определение, указывающее изменение состояния доступности относительной части встречной полосы движения, соответствующей проезду по транспортной сети транспортных средств посредством обхода препятствия в текущей полосе движения посредством проезда по относительной части встречной полосы движения.
[0246] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния перекрытия встречным удаленным транспортным средством, указывающую вероятность того, что встречным удаленным транспортным средством управляют так, что доступна относительная часть встречной полосы движения, соответствующая проезду по транспортной сети транспортных средств посредством обхода препятствия в текущей полосе движения посредством проезда по относительной части встречной полосы движения.
[0247] Модель оценки управления работой для конкретного варианта может включать в себя вторую вероятность смены состояния встречного удаленного транспортного средства, указывающую вероятность того, что доступность относительной части встречной полосы движения, соответствующей проезду по транспортной сети транспортных средств посредством обхода препятствия в текущей полосе движения посредством проезда по относительной части встречной полосы движения доступна, изменяется с доступной на заблокированную в ответ на другое встречное удаленное транспортное средство.
[0248] Модель оценки управления работой для конкретного варианта может включать в себя третью вероятность смены состояния встречного удаленного транспортного средства, указывающую вероятность, указывающую вероятность изменения расстояния до встречного транспортного средства.
[0249] Модель оценки управления работой для конкретного варианта может включать в себя четвертую вероятность смены состояния встречного удаленного транспортного средства, указывающую вероятность перехода упомянутого встречного транспортного средства из текущего состояния блокировки в другое состояние блокировки.
[0250] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния доступности сзади, указывающую вероятность изменения доступности части транспортной сети транспортных средств позади автономного транспортного средства в текущей полосе движения с доступной на заблокированную.
[0251] Модель оценки управления работой для конкретного варианта может включать в себя вероятность смены состояния препятствия впереди, указывающую вероятность изменения состояния препятствия впереди автономного транспортного средства в текущей полосе движения.
[0252] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения неопределенности блокировки, указывающую вероятность неопределенности для доступности части транспортной сети транспортных средств, соответствующей проезду по транспортной сети транспортных средств посредством обхода препятствия в текущей полосе движения посредством проезда по относительной части встречной полосы движения.
[0253] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения удаленного транспортного средства, указывающую вероятность точности наблюдения удаленного транспортного средства на основе расстояния между автономным транспортным средством и удаленным транспортным средством.
[0254] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения разрешения окклюзии, указывающую вероятность того, что окклюзия разрешена в ответ на проезд по транспортной сети транспортных средств в соответствии с действием управления транспортного средства «проезд у края».
[0255] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения доступности сзади, указывающую вероятность неопределенности для определения доступности части транспортной сети транспортных средств позади автономного транспортного средства в текущей полосе движения.
[0256] Модель оценки управления работой для конкретного варианта может включать в себя вероятность наблюдения препятствия впереди, указывающую вероятность неопределенности для определения состояния препятствия впереди автономного транспортного средства в текущей полосе движения.
[0257] В некоторых реализациях проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством может включать в себя проезд по первой части текущей полосы движения, после проезда по первой части текущей полосы движения проезд по первой части встречной полосы движения и после проезда по первой части встречной полосы движения проезда по второй части текущей полосы движения.
[0258] В некоторых реализациях проезд по транспортной сети транспортных средств может включать в себя приведение в действие блока контроля оперативной окружающей обстановки, чтобы идентифицировать препятствие впереди автономного транспортного средства в текущей полосе движения.
[0259] В некоторых реализациях процессор может быть сконфигурирован для выполнения инструкций, хранящихся на невременном считываемым компьютером носителе, для приведения в действие экземпляра модуля оценки управления работой для конкретного варианта, чтобы в ответ на прием от блока контроля оперативной окружающей обстановки транспортного средства информации оперативной окружающей обстановки, идентифицирующей вариант работы транспортного средства, инстанцировать экземпляр модуля оценки управления работой для конкретного варианта.
[0260] В некоторых реализациях вариант работы транспортного средства может быть вариантом работы транспортного средства при слиянии, и процессор может быть сконфигурирован для выполнения инструкций, хранящихся на невременном считываемым компьютером носителе, для приведения в действие экземпляра модуля оценки управления работой для конкретного варианта, чтобы проезжать по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством посредством проезда из первой полосы движения в транспортной сети транспортных средств в последующую объединенную полосу движения транспортной сети транспортных средств, при этом первая полоса движения и вторая полоса движения транспортной сети транспортных средств сливаются в последующую объединенную полосу движения.
[0261] В некоторых реализациях вариант работы транспортного средства может быть вариантом работы транспортного средства при обходе препятствия, и процессор может быть сконфигурирован для выполнения инструкций, хранящихся на невременном считываемым компьютером носителе, для приведения в действие экземпляра модуля оценки управления работой для конкретного варианта, чтобы проехать по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством посредством проезда по первой части текущей полосы движения, после проезда по первой части текущей полосы движения проезда по первой части встречной полосы движения и после проезда по первой части встречной полосы движения, проезда по второй части текущей полосы движения.
[0262] Хотя это не показано отдельно на фиг. 6-9, модуль при пешеходе, такой как модуль 4310 при пешеходе, показанный на фиг. 4, может включать модель POMDP.
[0263] Модель POMDP при пешеходе может задавать пространство состояний, которое включает в себя, например, фактор (


[0264] Модель POMDP при пешеходе может задавать пространство действий, которое включает в себя фактор действия, который может иметь значение из заданного набора значений, такого как {остановка, край, движение}. В модель POMDP при пешеходе могут быть включены другие факторы действия.
[0265] Модель POMDP при пешеходе может задавать пространство наблюдений, которое включает в себя фактор (



[0266] Модель POMDP при пешеходе может задавать смены (T) состояния, включая модификатор вероятности, представляющий увеличение вероятности того, что пешеход блокирует, в ответ на определение того, что пешеход находится в пределах заданного расстояния от пешеходного перехода, вероятность того, что пешеход может пройти мимо, модификатор вероятности, представляющий увеличение вероятности того, что пешеход может быть идентифицирован в пределах заданного расстояния от окклюзии, вероятность того, что пешеход может уступить автономному транспортному средству, вероятность того, что пешеход может сохранить текущее местоположение в близи от транспортной сети транспортных средств или их комбинацию. В модель POMDP при пешеходе могут быть включены другие вероятности смены.
[0267] Модель POMDP при пешеходе может задавать условные вероятности (O) наблюдения, включая вероятность шумового обнаружения движения пешеходов, чтобы определить блокировку, и вероятность необнаруженного пешехода вблизи окклюзии. В модель POMDP при пешеходе могут быть включены другие условные вероятности наблюдения.
[0268] Хотя это не показано отдельно на фиг. 6-9, модуль при пересечении, такой как модуль 4320 при пересечении, показанный на фиг. 4, может включать в себя модель POMDP.
[0269] Модель POMDP при пересечении может задавать пространство (S) состояний, которое включает в себя фактор (


[0270] Модель POMDP при пересечении может задавать пространство действий, которое включает в себя фактор действия, который может иметь значение из заданного набора значений, такого как {остановка, край, движение}. В модель POMDP при пересечении могут быть включены другие факторы действия.
[0271] Модель POMDP при пересечении может задавать пространство наблюдений, которое включает в себя фактор (


[0272] Модель POMDP при пересечении может задавать смены T состояния, включающие в себя вероятность того, что удаленное транспортное средство уступает приоритет автономному транспортному средству, вероятность того, что удаленное транспортное средство нарушает приоритет, или вероятность того, что удаленное транспортное средство останавливается на знаке остановки или замедляется до малой скорости. В модель POMDP при пересечении могут быть включены другие вероятности смены.
[0273] Модель POMDP при пересечении может задавать условные вероятности (O) наблюдения. Например, вероятность обнаружения удаленного транспортного средства, проезжающего в заданном геопространственном местоположении. В модель POMDP при пересечении могут быть включены другие условные вероятности наблюдения.
[0274] Хотя это не показано отдельно на фиг. 6-9, модуль при смене полосы движения, такой как модуль SSOCEM 4330 при смене полосы движения, показанный на фиг. 4, может включать в себя модель POMDP.
[0275] Модель POMDP при смене полосы движения может задавать пространство состояний, которое включает в себя фактор (

[0276] Модель POMDP при смене полосы движения может задавать пространство действий, которое включает в себя фактор (Aℓ) действия для действия управления транспортным средством, фактор (Av) действия модификатора скорости для действия управления транспортным средством или оба, которое может быть выражено как A = Aℓ
[0277] Модель POMDP при смене полосы движения может задавать пространство наблюдений, которое включает в себя фактор (

[0278] Модель POMDP при смене полосы движения может задавать смены T состояния, включающие в себя вероятность того, что удаленное транспортное средство ускоряется или замедляется со степенью, которая превышает заданное пороговое значение, вероятность того, что удаленное транспортное средство меняет полосы движения так, что удаленное транспортное средство переходит от блокирования к неблокированию, и вероятность того, что на проезд по транспортной сети транспортных средств автономного транспортного средства влияет препятствие впереди. В модель POMDP при смене полосы движения могут быть включены другие вероятности смены.
[0279] Модель POMDP при смене полосы движения может определять условной вероятности (O) наблюдения. Например, вероятность точного определения вероятности доступности. Другие условной вероятности наблюдения могут быть включены в модель POMDP при смене полосы движения.
[0280] Как используется в данном документе, терминология «компьютер» или «вычислительное устройство» включает в себя любой блок или комбинацию блоков, способных выполнять любой способ, или любую его часть или части, раскрытые в данном документе.
[0281] Используемый здесь термин «процессор» обозначает один или более процессоров, таких как один или более процессоров специального назначения, один или более процессоров цифровых сигналов, один или более микропроцессоров, один или более контроллеров, один или более микроконтроллеров, одно или более приложений процессора, одна или более специализированных интегральных схем (ASIC), одна или более стандартных микросхем специального применения (ASSP), одна или более программируемых вентильных матриц (FPGA), любой другой тип или комбинация интегральных микросхем, один или более конечных автоматов или любая их комбинация.
[0282] Используемый здесь термин «память» обозначает любой используемый компьютером или считываемый компьютером носитель или устройство, которое может физически содержать, хранить, передавать или транспортировать любой сигнал или информацию, которые могут использоваться любым процессором или в соединении с ним. Например, память может быть одним или более постоянными запоминающими устройствами (ПЗУ), одним или более запоминающими устройствами с произвольным доступом (ОЗУ), одним или более регистрами, запоминающими устройствами с низкой мощностью с двойной скоростью передачи данных (LPDDR), одним или более кэш-памятями, одним или более полупроводниковыми запоминающими устройствами, одним или более магнитными носителями, одним или более оптическими носителями, одним или более магнитооптическими носителями или любой их комбинацией.
[0283] Используемый здесь термин «инструкции» может включать в себя указания или выражения для выполнения любого способа или любой его части или частей, раскрытых в данном документе, и могут быть реализованы в аппаратном обеспечении, программном обеспечении или любой их комбинации. Например, инструкции могут быть реализованы в виде информации, такой как компьютерная программа, хранящаяся в памяти, которая может выполняться процессором для выполнения любого из соответственных способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. В некоторых вариантах осуществления инструкции или их часть могут быть реализованы в виде процессора или схемы специального назначения, которые могут включать в себя специализированное аппаратное обеспечение для реализации любого из способов, алгоритмов, аспектов или их комбинаций, как описано в данном документе. В некоторых реализациях части команд могут быть распределены по нескольким процессорам на одном устройстве, на нескольких устройствах, которые могут обмениваться данными напрямую или через сеть, такую как локальная сеть, глобальная сеть, Интернет или их комбинация.
[0284] Как используется в данном документе, термины «пример», «вариант осуществления», «реализация», «аспект», «признак» или «элемент» указывают на то, что они служат примером, экземпляром или иллюстрацией. Если явно не указано, любой пример, вариант осуществления, реализация, аспект, признак или элемент не зависит от каждого другого примера, варианта осуществления, реализации, аспекта, признака или элемента и может использоваться в сочетании с любым другим примером, вариантом осуществления, реализацией, аспектом, признаком или элементом.
[0285] Используемая здесь терминология «определять» и «идентифицировать» или любые их вариации включает в себя выбор, установление, вычисление, поиск, прием, определение, установление, получение или иное выявление или определение любым способом, каким бы то ни было образом, используя одно или более из устройств, показанных и описанных здесь.
[0286] Используемый здесь термин «или» предназначен для обозначения включающего «или», а не исключающего «или». То есть, если не указано иное или не ясно из контекста, «Х включает А или В» предназначено для обозначения любой из естественных включающих перестановок. То есть, если Х включает А; Х включает В; или X включает в себя как A, так и B, тогда «X включает в себя A или B» выполняется в любом из вышеупомянутых случаев. Кроме того, признаки в единственном числе, используемые в настоящей заявке и прилагаемой формуле изобретения, как правило, следует истолковывать как означающие «один или более», если не указано иное или не ясно из контекста, направленного на единственное число.
[0287] Кроме того, для простоты объяснения, хотя фигуры и описания в данном документе могут включать в себя последовательности или серии этапов или стадий, элементы способов, раскрытых в данном документе, могут встречаться в различных порядках или одновременно. Кроме того, элементы способов, раскрытых в данном документе, могут встречаться с другими элементами, явно непредставленными и не описанными в данном документе. Кроме того, не все элементы способов, описанных в данном документе, могут потребоваться для реализации способа в соответствии с этим раскрытием. Хотя аспекты, признаки и элементы описаны в данном документе в конкретных комбинациях, каждый аспект, признак или элемент могут использоваться независимо или в различных комбинациях с другими аспектами, признаками и элементами или без них.
[0288] Вышеописанные аспекты, примеры и реализации были описаны для того, чтобы обеспечить легкое понимание раскрытия, а не для ограничения. Напротив, раскрытие охватывает различные модификации и эквивалентные схемы, включенные в объем прилагаемой формулы изобретения, причем этот объем должен соответствовать самой широкой интерпретации, чтобы охватывать все такие модификации и эквивалентную структуру, которые разрешены законодательством.
Реферат
Изобретение относится к управлению автономным транспортным средством и автономному вождению. Проезд автономного транспортного средства по транспортной сети транспортных средств включает в себя приведение в действие экземпляра модуля оценки управления работой для конкретного варианта, прием действия-кандидата управления транспортным средством от экземпляра модуля оценки управления работой для конкретного варианта и проезд по части транспортной сети транспортных средств в соответствии с действием-кандидатом управления транспортным средством. При этом экземпляр модуля оценки управления работой для конкретного варианта включает в себя экземпляр модели оценки управления работой для конкретного варианта для варианта работы транспортного средства. Вариант работы транспортного средства представляет собой вариант работы транспортного средства при слиянии или вариант работы транспортного средства при обходе препятствия. Повышается безопасность при эксплуатации автономного транспортного средства. 3 н. и 12 з.п. ф-лы, 9 ил.
Комментарии