Транспортное средство, система выявления объектов в углублении для ног и способ для выявления объектов в углублении для ног - RU2701294C2
Код документа: RU2701294C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Эта заявка в целом относится к выявлению педалей с заблокированным управлением в транспортном средстве.
УРОВЕНЬ ТЕХНИКИ
В типичном транспортном средстве, ускорение и замедление транспортного средства управляется ножными педалями. Водитель настраивает величину ускорения или замедления, нажимая на надлежащую ножную педаль. Ножные педали могут управлять ускорением и замедлением через механическую связь с системой управления торможением или дросселем. Ножные педали могут включать в себя электрические выходные сигналы, которые указывают положение педали. Электрический выходной сигнал может использоваться электронным модулем для управления ускорением и замедлением транспортного средства. Ножные педали действуют, чтобы указывать намерение водителя системам управления ускорением и замедлением. Однако есть ситуации, в которых намерение водителя не может быть точно известно. Есть ситуации, в которых непреднамеренные объекты мешают ножным педалям. Это мешающее действие препятствует способности выдавать намерение водителя в системы управления. Объекты в углублении для ног в полу кузова возле ножных педалей может вызывать неожиданное действие транспортного средства. Например, объект (например, коврик на полу) может лежать на ножной педали, вызывая ввод в действие ножной педали, который не намечен водителем. Объект может становиться застрявшим под ножной педалью, вызывая недостаток движения педали, когда требуется водителем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Транспортное средство включает в себя углубление для ног в полу кузова с водительской стороны, включающее в себя множество педалей. Транспортное средство дополнительно включает в себя датчик, выполненный с возможностью захватывать изображение углубления для ног в полу кузова с водительской стороны, и по меньшей мере один контроллер, запрограммированный, в ответ на различие между изображением и опорными изображениями углубления для ног в полу кузова, являющееся указывающим наличие объекта в углублении для ног в полу кузова, который препятствует приведению в действие одной или более из педалей, выводить предупредительный сигнал. По меньшей мере один контроллер дополнительно может быть запрограммирован выводить состояние педали для каждой из педалей на основании сравнения между изображением и опорными изображениями.
В некоторых конфигурациях, опорные изображения могут представлять собой множество захваченных изображений, связанных с расположениями ступней водителя относительно педалей в отсутствие объектов в углублении для ног в полу кузова, которые препятствуют приведению в действие одной или более из педалей.
В некоторых конфигурациях, по меньшей мере один контроллер дополнительно может быть запрограммирован принимать данные о положении педали для педалей и, в ответ на различие между изображением и опорным изображением, связанными с данными о положении педали, являющееся указывающим непреднамеренное использование педали, выводить предупредительный сигнал.
Транспортное средство дополнительно может включать в себя систему избежания столкновений, которая выполнена с возможностью, в ответ на предупредительный сигнал, увеличивать расстояние от целевого объекта, на котором следует вырабатывать указание предупреждения столкновений. Систему избежания столкновений дополнительно может быть выполнена с возможностью принимать состояние педали и, в ответ на состояние педали, являющееся иным, чем ожидаемое состояние педали, выводить предупреждение избежания аварий. Система избежания столкновений дополнительно может быть выполнена с возможностью, в ответ на состояние педали, являющееся иным, чем ожидаемое состояние педали, и целевой объект, находящийся менее чем на предопределенном расстоянии от транспортного средства, запрашивать использование тормозов для снижения скорости транспортного средства, чтобы избежать столкновения с целевым объектом.
Система выявления объектов в углублении для ног в полу кузова включает в себя датчик, выполненный с возможностью выводить данные, указывающие состояние углубления для ног в полу кузова с водительской стороны, которое включает в себя множество педалей, и по меньшей мере один контроллер, запрограммированный, в ответ на различие между данными и хранимыми данными, соответствующими опорным состояниям углубления для ног в полу кузова, являющееся указывающим наличие объекта, который препятствует приведению в действие одной или более из педалей, выводить предупредительный сигнал. Выходные данные датчика могут быть изображением. Опорные состояния могут представлять собой множество состояний, связанных с расположениями ступней водителя относительно педалей в отсутствие объектов в углублении для ног в полу кузова, которые препятствуют приведению в действие одной или более из педалей. По меньшей мере один контроллер дополнительно может быть запрограммирован выводить состояние педали для каждой из педалей на основании сравнения между данными и хранимыми данными.
Датчик может быть цифровой камерой, видеокамерой, лазерным датчиком, радиолокационным датчиком, звуколокационным датчиком или камерой ночного видения. Предупредительный сигнал может быть одним или более из слышимой сигнализации, визуального индикатора и тактильного индикатора.
Способ для выявления объектов в углублении для ног в полу кузова с водительской стороны транспортного средства включает в себя захват, посредством по меньшей мере одного контроллера, изображения углубления для ног в полу кузова, включающего в себя множество педалей. Способ дополнительно включает в себя вывод, посредством по меньшей мере одного контроллера, указания предупреждения в ответ на различие между изображением и опорными изображениями углубления для ног в полу кузова, являющееся указывающим наличие объекта в углублении для ног в полу кузова, который препятствует приведению в действие одной или более из педалей. Способ дополнительно может включать в себя увеличение, посредством по меньшей мере одного контроллера, расстояния от целевого объекта, на котором система избежания столкновений использует тормоза для уменьшения скорости транспортного средства. Способ дополнительно может включать в себя увеличение, посредством по меньшей мере одного контроллера, расстояние от целевого объекта, на котором система избежания столкновений вырабатывает указание предупреждения столкновений. Способ дополнительно может включать в себя вывод, посредством по меньшей мере одного контроллера, состояния педали для каждой из педалей на основании сравнения между изображением и опорными изображениями. Способ дополнительно может включать в себя вывод, посредством по меньшей мере одного контроллера, указания предупреждения в ответ на различие между изображением и опорным изображением, связанными с данными ускорения транспортного средства, указывающее непреднамеренное использование педали.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
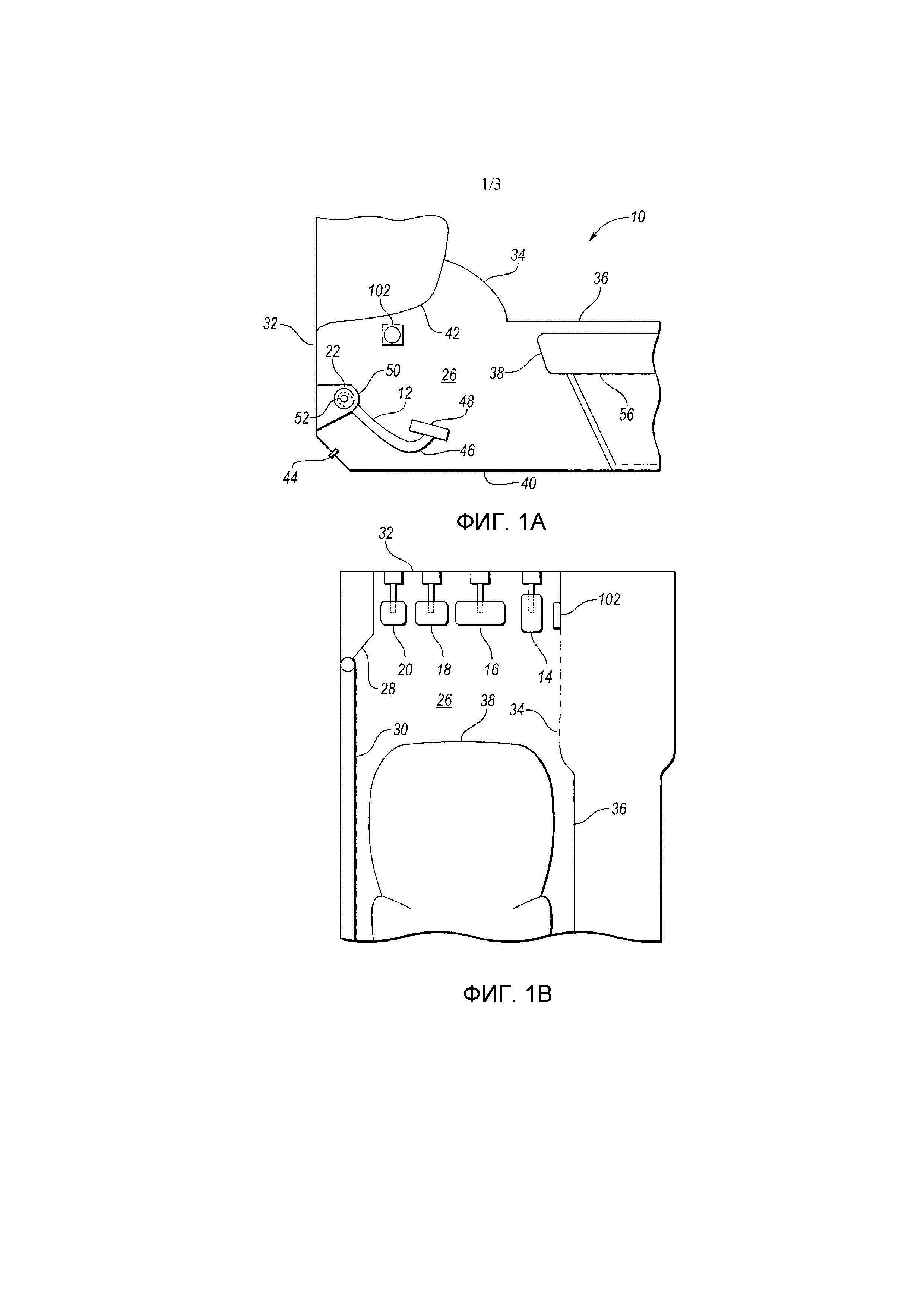
Фиг.1A - возможный вид сбоку углубления для ног в полу кузова с водительской стороны;
фиг.1B - возможный вид сверху углубления для ног в полу кузова с водительской стороны;
фиг.2 - возможная конфигурация модулей управления в транспортном средстве, включающем в себя систему выявления объектов в углублении для ног в полу кузова с водительской стороны; и
фиг.3 - возможная последовательность операций для вывода предупредительного сигнала для системы выявления объектов в углублении для ног в полу кузова с водительской стороны.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего раскрытия описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения. Как будут понимать рядовые специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с доктринами этого раскрытия, однако, могли бы требоваться для конкретных применений или реализаций.
Фиг.1A изображает возможный вид сбоку углубления 26 для ног в полу кузова с водительской стороны транспортного средства 10. Фиг.1B изображает возможный вид сверху углубления 26 для ног в полу кузова с водительской стороны транспортного средства 10. В углублении 26 для ног в полу кузова может быть установлено несколько педальных узлов 12 рычажного типа, выполненных с возможностью нажиматься для приведения в действие и управления одной или более из функций дросселя, тормозов и сцепления. Транспортное средство 10 может включать в себя педаль 14 акселератора, которая выполнена с возможностью настраивать механизм дросселя для управления величиной ускорения транспортного средства 10. Транспортное средство 10 может включать в себя тормозную педаль 16, которая выполнена с возможностью настраивать величину тормозного давления для управления величиной замедления транспортного средства 10. Транспортное средство 10 может включать в себя педаль 18 сцепления, которая выполнена с возможностью расцеплять трансмиссию с двигателем, чтобы давать возможность переключения передачи трансмиссии. Транспортное средство 10 может включать в себя педаль 20 стояночного тормоза, которая выполнена с возможностью вводить в действие стояночный тормоз. Транспортное средство 10, имеющее автоматическую трансмиссию, может включать в себя педаль 14 акселератора и тормозную педаль 16. Транспортное средство 10, имеющее ручную трансмиссию, может включать в себя педаль 14 акселератора, тормозную педаль 16 и педаль 18 сцепления. Фиг.1A и 1B изображают водительское углубление 26 для ног в полу кузова с левой стороны, но раскрытие также покрывает водительское углубление 26 для ног в полу кузова с правой стороны с положением компонентов, настроенным соответствующим образом.
Педальный узел 12 может быть расположен в углублении 26 для ног в полу кузова транспортного средства 10 и может быть выполнен с возможностью приводиться в действие ступнями водителя. Углубление 26 для ног в полу кузова может быть определено пространством, которое включает в себя педальные узлы 12, и такое пространство окружает педальные узлы. В горизонтальной плоскости, углубление 26 для ног в полу кузова может включать в себя пространство, ограниченное водительской боковой панелью 28 и дверью 30, тепловым экраном 32, боковой стенкой 36 центрального туннеля и/или боковой стенкой 34 центральной консоли и передней частью водительского сиденья 38. В вертикальном измерении, углубление 26 для ног в полу кузова может включать в себя пространство между днищем 40 кузова транспортного средства 10 и обратной стороной приборной панели 42 транспортного средства 10. Тепловой экран 32 (или переборка) может быть определен в качестве конструкции или панели, которая отделяет моторный отсек от пассажирского отделения транспортного средства 10. Днище 40 кузова транспортного средства 10 может быть определено в качестве конструктивного элемента или панели, которая отделяет пассажирское отделение от нижней стороны транспортного средства 10. Тепловой экран 32 и днище 40 кузова могут быть прикреплены (например, приварены, приболчены, приклепаны) друг к другу по шву 44, который может определять границу между этими двумя. Углубление 26 для ног в полу кузова дополнительно может быть определено в качестве области, охваченной такими поверхностями, содержащимися в объеме, определенном максимальными размерами по каждой координате горизонтальной плоскости и максимальным значением вертикального размера. В более общем смысле, углубление 26 для ног в полу кузова может включать в себя то пространство поблизости от педалей 14, 16, 18, 20, в котором ступни водителя могут быть размещены во время эксплуатации транспортного средства 10.
Педальный узел 12 может включать в себя плечо 46 рычага и площадку 48 для ступни. Площадка 48 для ступни может быть сконфигурирована из условия, чтобы ступня водителя могла быть размещена на площадке 48, чтобы прикладывать силу. Каждая педаль может иметь площадку 48 для ступни разной формы. Плечо 46 педали может быть шарнирно присоединено к установочному кронштейну 50, который присоединен к тепловому экрану 32 или днищу 40 кузова. Когда сила приложена к площадке 48 для ступни, педаль 12 может поворачиваться вокруг точки 52 поворота плеча 46 рычага. Педальный узел 12 может быть механически связан с соответствующими механическими системами через механические связи, и приведение в действие соответствующей механической системы может осуществляться нажатием педали 12.
Педальный узел 12 может быть выполнен с возможностью смещаться в установленное по умолчанию или выведенное из работы положение. Механизм для смещения педального узла 12 в установленное по умолчанию положение может включать в себя пружину кручения в точке 52 поворота или другой демпфирующий механизм, прикрепленный между плечом 46 рычага и тепловым экраном 32 или днищем 40 кузова. Механизм смещения может быть выполнен с возможностью обеспечивать сопротивление движению приведения в действие педали 12 (например, нажатию педали). В некоторых конфигурациях, механические связи для приведения в действие соответствующих функций могут обеспечивать это сопротивление движению. Например, движению тормозной педали может оказываться сопротивление силой, требуемой для создания давления в тормозной системе. Педальный узел 12 может включать в себя электрический датчик 22, который выдает сигнал 54, который меняется с изменением положения педали 12. Электрический датчик 22 может быть потенциометром, присоединенным в точке 52 поворота плеча 46 рычага, в котором сопротивление меняется по мере того, как плечо 46 рычага поворачивается вокруг точки 52 поворота.
Электрический датчик 22 может быть электрически присоединен к контроллеру, чтобы давать возможность выявления положения или относительного угла поворота педали 12. Положение педали может использоваться контроллером для управления операциями транспортного средства, такими как ускорение и замедление. Недостаток педального узла 12 рычажного типа состоит в том, что объект может попадать на траекторию движения педального узла 12. Например, объект, который останавливается между плечом 46 рычага или площадкой 48 для ступни и днищем 40 кузова, может препятствовать движению педали 12. Объект может мешать движению педали 12 в положение, намеченное водителем, приводя к потере управления для водителя. То есть, педаль 12 не производит управляющее воздействие, которое подразумевает водитель. Например, объект может затруднять движение тормозной педали 16 вниз. Если тормозная педаль 16 заблокирована, замедление транспортного средства может быть меньшим, чем подразумевает водитель.
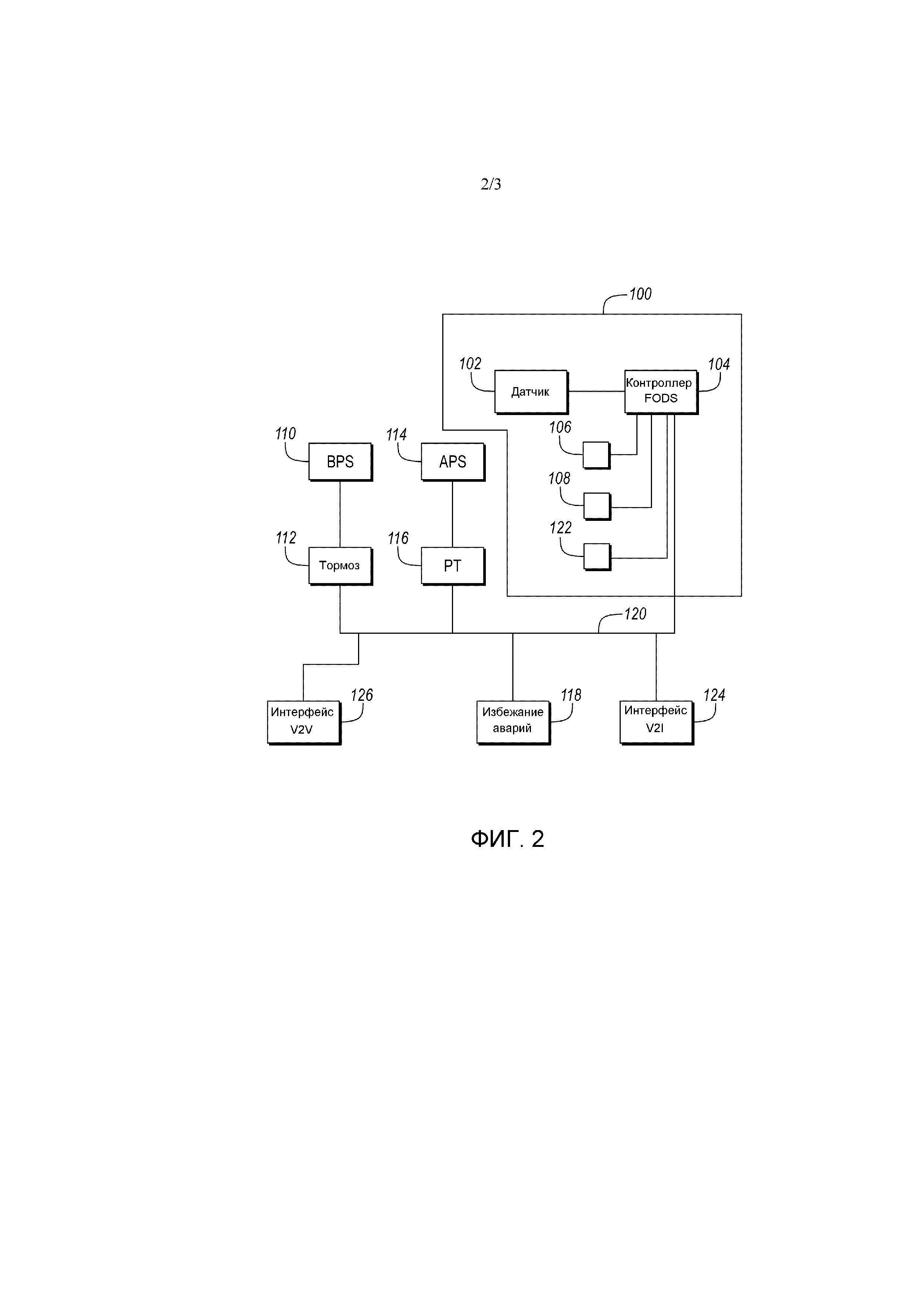
Фиг.2 изображает возможную конфигурацию контроллеров и датчиков для реализации системы 100 выявления объектов в углублении для ног в полу кузова (FODS). Транспортное средство 10 может включать в себя систему 100 выявления объектов в углублении для ног в полу кузова для контроля углубления 26 для ног в полу кузова на непреднамеренные объекты, которые могут мешать работе педали. Мешающее действие педали может включать в себя предотвращение расположения педали 12 водителем в намеченном положении (например, блокирование движения педали). Препятствующий объект может вызывать ослабленную реакцию педали, приводящую к управляющему воздействию, которое является меньшим, чем намерение водителя, такому как уменьшенное торможение или ускорение. Еще одно мешающее действие педали может включать в себя расположение педали 12 в приведенном в действие положении без взаимодействия с водителем (например, непреднамеренную силу, приложенную к педали). Мешающее действие для работы педали без взаимодействия с водителем может вызывать непреднамеренные управляющие воздействия, такие как непреднамеренное торможение или ускорение.
Система 100 выявления объектов в углублении для ног в полу кузова может включать в себя один или более датчиков 102 выявления объектов, расположенных в углублении 26 для ног в полу кузова транспортного средства 10, для обнаружения объектов, которые могут мешать движению или вызывать движение одной или более педалей 12. Датчик 102 выявления объектов может включать в себя датчик фотооптического типа, такой как лазерный датчик, или датчик типа с распознаванием изображений, такой как камера. Датчик 102 выявления объектов может включать в себя инфракрасные возможности, чтобы добиваться видения в условиях тусклого освещения. Датчик 102 выявления объектов может быть цифровой камерой, видеокамерой, лазерным датчиком, радиолокационным датчиком, звуколокационным датчиком или камерой ночного видения. Выходной сигнал датчика 102 выявления объектов может быть изображением углубления 26 для ног в полу кузова. Датчик 102 выявления объектов может быть выполнен с возможностью выдавать двумерные изображения. В некоторых конфигурациях, датчик 102 выявления объектов может быть выполнен с возможностью выдавать данные трехмерного изображения с использованием многочисленных датчиков.
Система 100 выявления объектов в углублении для ног в полу кузова может включать в себя один или более контроллеров FODS, которые взаимодействуют с датчиком 102 выявления объектов. Контроллер 104 FODS может включать в себя процессор для выполнения инструкций и программ. Контроллер 104 FODS дополнительно может включать в себя энергозависимую и энергонезависимую память для хранения данных и инструкций. Контроллер 104 FODS дополнительно может включать в себя интерфейсные схемы для взаимодействия с датчиком 102 выявления объектов. Интерфейсные схемы могут включать в себя аналого-цифровые преобразователи и фильтры. Контроллер 104 FODS может включать в себя один или более последовательных интерфейсов 120 для поддержания связи с дополнительными контроллерами в транспортном средстве 10. Последовательный интерфейс 120 может быть интерфейсом локальной шины контроллеров (CAN) Контроллер 104 FODS может включать в себя сетевой интерфейс, определенный семейством стандартов Института инженеров по электротехнике и электронике (IEEE) 802. Контроллер 104 FODS может включать в себя программные драйверы для поддержания связи через последовательный и сетевой интерфейсы.
Контроллер 112 тормозной системы может быть электрически присоединен к датчику 110 тормозной педали, который механически присоединен к тормозной педали 16. Датчик 110 тормозной педали может выдавать сигнал, указывающий положение или угол поворота тормозной педали 16. Контроллер 116 силовой передачи может быть электрически присоединен к датчику 114 педали акселератора, который механически присоединен к педали 14 акселератора. Датчик педали акселератора может выдавать сигнал, указывающий положение или угол поворота педали 14 акселератора. Система 118 избежания столкновений (CAS) может включать в себя один или более контроллеров, которые поддерживают связь с другими контроллерами 104, 112, 116 через последовательную шину 120 связи. Контроллер 104 FODS может обмениваться данными с контроллером 112 тормозов, контроллером 116 силовой передачи и CAS 118.
Датчик 102 выявления объектов может быть установлен в месте в пассажирской кабине, чтобы контролировать углубление 26 для ног в полу кузова касательно объектов. Датчик 102 выявления объектов может быть выполнен с возможностью выдавать двумерные изображения. Например, датчик 102 выявления объектов может быть установлен в боковую стенку 34 центральной консоли или водительскую боковую панель 28. В некоторых конфигурациях, датчик 102 выявления объектов может быть установлен на тепловом экране 32. В некоторых конфигурациях, датчик 102 выявления объектов может быть установлен в пространстве между обратной стороной водительского сиденья 56 и днищем 40 кузова. Датчик 102 выявления объектов может быть установлен в положении, таком чтобы датчик 102 мог собирать данные, представляющие собой все углубление 26 для ног в полу кузова. Некоторые конфигурации могут включать в себя многочисленные датчики 102 выявления объектов, установленные в разных местах для улучшения обнаружения. Соображения для места установки датчика 102 выявления объектов могут включать в себя доведение до максимума обзора датчика по углублению 26 для ног в полу кузова, минимизацию загороженных видов и уменьшение блокировок датчиков.
В нормальных условиях, объектами, ожидаемыми в углублении 26 для ног в полу кузова, являются исключительно ноги и ступни водителя. По существу, система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью распознавать, что объект в углублении 26 для ног в полу кузова является одним или обоими из ног и ступней водителя. Система 100 дополнительно может быть выполнена с возможностью обнаруживать дополнительные объекты, которые могут мешать нормально работе педалей. Такие объекты могут включать в себя коврики или ковры на полу, которые могут заворачиваться возле педали 12 или иметь иную измененную форму некоторым образом, которая может оказывать влияние на работу педали 12. Объекты могут включать в себя любой из многообразия незакрепленных предметов, которые могут находиться на полу транспортного средства. Например, объект может быть мячом или другим круглым объектом, банкой, бутылкой, коробкой или пакетом, либо каталогом или книгой. Любой объект, возимый в транспортном средстве 10, потенциально может оказываться в углублении 26 для ног в полу кузова.
Система 100 выявления объектов в углублении для ног в полу кузова может включать в себя слышимый индикатор 106, который может использоваться для предупреждения водителя об объектах в углублении 26 для ног в полу кузова. Слышимый индикатор 106 может быть звуковым сигнализатором, громкоговорителем, колокольчиком, звонком или другим генератором слышимых звуков. Система 100 выявления объектов в углублении для ног в полу кузова может включать в себя визуальный индикатор 108, который может использоваться для предупреждения водителя об объектах в углублении 26 для ног в полу кузова. Визуальный индикатор 108 может быть лампой, фонарем, устройством отображения или другой визуальной индикацией. Визуальный индикатор 108 может быть установлен в месте, которое без труда видно водителю. Система 100 выявления объектов в углублении для ног в полу кузова может включать в себя тактильный индикатор 122, который может использоваться для предупреждения водителя. Тактильный индикатор 122 может включать в себя электродвигатель, который вращает несбалансированный грузик. Например, тактильный индикатор 122 может быть присоединен к рулевому колесу или педали 12, чтобы вызывать вибрацию в ответ на предупреждение. Слышимый индикатор 106, визуальный индикатор 108 и тактильный индикатор 122 могут быть сопряжены с контроллером 104 посредством отдельных проводов или последовательной связи. Слышимый индикатор 106, визуальный индикатор 108 и тактильный индикатор 122 могут быть электрически присоединены к контроллеру 104 FODS. В некоторых конфигурациях, слышимый индикатор 106, визуальный индикатор 108 и тактильный индикатор 122 могут управляться через последовательную шину связи.
Датчик 102 выявления объектов может выводить данные, указывающие текущее состояние углубления 26 для ног в полу кузова с водительской стороны. Например, текущее состояние может быть представлено изображением или радиолокационной/звуколокационной картой углубления 26 для ног в полу кузова. Датчик 102 выявления объектов может быть выполнен с возможностью захватывать изображение углубления 26 для ног в полу кузова. Датчик 102 выявления объектов может обрабатывать необработанные данные с датчиков. Например, датчик изображений может реализовывать алгоритм выделения краев или другие типы фильтров для лучшего выделения объектов и форм в углублении 26 для ног в полу кузова. Выходные данные могут быть изображением или образом изображения, который представляет собой текущее состояние углубления 26 для ног в полу кузова.
Контроллер 104 FODS может сохранять данные в памяти, которые являются указывающими опорные состояния углубления 26 для ног в полу кузова и педалей 12. Опорные состояния могут быть изображениями. Хранимые данные могут соответствовать выходным данным датчика 102 выявления объектов во время нормальных условий эксплуатации. Опорные состояния могут включать в себя ожидаемые условия эксплуатации без непреднамеренных объектов в углублении 26 для ног в полу кузова. Хранимые данные могут формироваться во время развертывания посредством записи выходных данных датчика 102 выявления объектов во время различных опорных условий. Опорные состояния могут включать в себя предсказанные выходные данные с датчиков для углубления 26 для ног в полу кузова до входа водителя. Опорные состояния могут включать в себя условия, в которых ноги и ступни водителя расположены для эксплуатации транспортного средства. Например, опорные состояния могут включать в себя использование педали акселератора, использование тормозной педали и использование педали сцепления. Опорные состояния могут включать в себя различные нерабочие положения для ступней водителя. Опорные состояния могут включать в себя расположения для вождения, в которых обе ступни находятся на педалях. Опорные состояния могут представлять собой множество состояний, связанных с расположениями ступней водителя относительно педалей в отсутствие объекта в углублении 26 для ног в полу кузова, который препятствует приведению в действие одной или более из педалей 12.
Система 100 выявления объектов в углублении для ног в полу кузова может калиброваться посредством обучения системы распознавать образы, присутствующие во время нормальных условий эксплуатации. В течение периода обучения, контроллер 104 FODS может контролировать сигналы с датчика 102 выявления объектов в разных условиях для определения опорных изображений и образов. Например, контроллер 104 FODS может обрабатывать данные с датчиков во время ввода в действие педалей и сохранять данные изображений и образов в энергонезависимой памяти для более позднего извлечения. Контроллер 104 FODS может обрабатывать данные с датчиков для образов, представляющих собой ноги и ступни водителя. Могут идентифицироваться нормальные образ вождения или опорное состояние. Например, образы могут сохраняться во время ввода в действие педали акселератора и во время ввода в действие тормозной педали 16. Период обучения может быть временем с фиксированным периодом, соответствующим продаже транспортного средства 10. В некоторых конфигурациях, период обучения может быть непрерывным, так чтобы опорные состояния могли непрерывно обновляться со временем. Непрерывное обновление опорных состояний может улучшать рабочие характеристики, так как опорные состояния могут становиться настроенными под каждого водителя.
Хранимые данные могут обрабатываться автономно и сохраняться в памяти контроллера 104 FODS. Опорные данные могут представлять собой изображения углубления 26 для ног в полу кузова. Опорные данные могут предварительно обрабатываться для идентификации форм и образов, которые присутствуют в изображениях углубления 26 для ног в полу кузова во время нормальной эксплуатации. Автономная обработка может включать в себя обработку опорных данных с использованием алгоритмов распознавания образов и форм. Хранимые данные также могут включать в себя соответствующие параметры, идентифицирующие состояние. Параметры могут включать в себя данные, указывающие педали, которые используются. Образы, представляющие собой формы, могут сохраняться в памяти контроллера 104 FODS. Автономная обработка может включать в себя операции, которые подобны обработке посредством контроллера 104 FODS во время эксплуатации транспортного средства.
Хранимые данные могут представлять собой базу данных ожидаемых выходных данных датчика 102 выявления объектов во время нормальной эксплуатации. Во время эксплуатации транспортного средства, контроллер 104 FODS может принимать и обрабатывать данные с датчика 102 выявления объектов. Данные, представляющие собой текущее состояние, могут сравниваться с хранимыми данными, представляющими опорные состояния. Текущее состояние может сравниваться с каждым опорным состоянием до тех пор, пока не выявлено соответствие. Если данные не распознаны в пределах хранимых данных, то может быть объект, присутствующий в углублении 26 для ног в полу кузова. В некоторых конфигурациях, хранимые данные могут включать в себя объекты, которые мешают движению одной или более из педалей 12.
Обработка посредством контроллера 104 FODS может включать в себя идентификацию формы. Формы, идентифицированные в данных с датчиков текущего состояния, могут сравниваться с формами, хранимыми в памяти. Например, форма может распознаваться в качестве ступни водителя. Данные могут обрабатываться, чтобы учитывать разные размеры форм. Контроллер FODS может выполнять алгоритмы распознавания образов, чтобы идентифицировать образы в данных. Например, хранимые данные могут представлять собой имеющую средние размеры ступню. Текущие данные могут отличаться вследствие большей или меньшей ступни водителя. Контроллер 104 FODS может быть выполнен с возможностью масштабировать и переориентировать формы и образы для содействия сравнению хранимых данных и текущих данных с датчиков.
Во время эксплуатации транспортного средства, объекты могут перемещаться в и из углубления 26 для ног в полу кузова. Например, объект может перемещаться по мере того, как транспортное средство 10 ускоряется и замедляется. Контроллер 104 FODS может периодически осуществлять выборку данных с датчиков по датчику 102 выявления объектов. Система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью отслеживать перемещение объектов в и из зоны углубления 26 для ног в полу кузова. Контроллер 104 FODS может быть выполнен с возможностью сравнивать следующие друг за другом изображения, чтобы идентифицировать изменения между изображениями. Различия в изображениях между моментами времени выборки могут указывать перемещение объектов в углублении 26 для ног в полу кузова. Контроллер 104 FODS может вводить в действие индикатор предупреждения, если объект распознается движущимся в и из зоны углубления 26 для ног в полу кузова, чтобы предупреждать водителя о состоянии.
Система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью работать в условиях освещения, которые присутствуют в углублении 26 для ног в полу кузова. Система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью работать в условиях тусклого освещения, как может быть присутствующим ночью. Хотя внутреннее освещение может подсвечивать углубление 26 для ног в полу кузова, могут быть ситуации, в которых освещение загораживается или является недействующим. Датчик 102 выявления объектов может быть камерой с возможностью ночного видения, чтобы работать в условиях тусклого освещения. Инфракрасный датчик, радиолокационный и/или звуколокационный датчик может использоваться для улучшения возможностей при тусклом освещении.
Система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью контролировать углубление 26 для ног в полу кузова во время условий с включенным зажиганием. То есть, система 100 выявления объектов в углублении для ног в полу кузова может быть действующей, в то время как транспортное средство находится в действии. Система 100 выявления объектов в углублении для ног в полу кузова может непрерывно контролировать состояние углубления 26 для ног в полу кузова, даже когда педали не приводятся в действие. Таки образом, система 100 выявления объектов в углублении для ног в полу кузова может выявлять движение ступни водителя, а также движение объектов, которые могут находиться в пределах углубления 26 для ног в полу кузова. По существу, система 100 выявления объектов в углублении для ног в полу кузова может выдавать больше, чем просто подтверждение используемой педали. Система 100 выявления объектов в углублении для ног в полу кузова может быть способна определять намеренное использование педалей 12 водителем, не полагаясь на электрический датчик 22, связанный с педалью 12.
Система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью выявлять, когда непреднамеренные объекты находятся в углублении 26 для ног в полу кузова с водительской стороны. Контроллер 104 FODS может принимать данные, представляющие собой текущее состояние углубления 26 для ног в полу кузова. Данные могут быть изображением углубления 26 для ног в полу кузова. Контроллер 104 FODS может сравнивать текущее с опорным состояния углубления 26 для ног в полу кузова. Опорные состояния могут быть изображениями углубления 26 для ног в полу кузова, которые хранятся в памяти. С использованием стандартных алгоритмов обработки изображений, контроллер 104 FODS может сравнивать изображение с опорными изображениями. В ответ на различие между изображением и опорными изображениями углубления для ног в полу кузова, являющееся указывающим на наличие объекта в углублении для ног в полу кузова, который препятствует приведению в действие одной или более из педалей, контроллер 104 FODS может выводить предупредительный сигнал для ввода в действие слышимого индикатора 106, видимого индикатора 108 и/или тактильного индикатора 122.
В некоторых конфигурациях, система 100 выявления объектов в углублении для ног в полу кузова может быть выполнена с возможностью определять, соответствуют ли сигналы датчиков с педали, которую приводит в действие водитель. То есть, электрический сигнал, связанный с педалью, указывает движение педали, когда текущее состояние указывает, что педаль приводится в действие. В качестве примера, может выявляться объект, который препятствует отпускание педали 12 обратно в установленное по умолчанию положение. Данные с датчика 102 выявления объектов могут быть указывающими ногу или ступню водителя, находящуюся в стороне от педалей 12. В такой ситуации, данные, указывающие ввод в действие педали на основании данных педали, не соответствуют данным с датчика 102 выявления объектов. В такой ситуации, контроллер 104 FODS может вводить в действие слышимый и/или видимый индикатор.
В дополнение к выводу предупреждения, контроллер 104 FODS может выводить сигнал, указывающий состояние каждой из педалей 12. Информация о состоянии может выводиться для каждой из педалей 12 в углублении 26 для ног в полу кузова. Информация о состоянии может включать в себя предсказанное состояние, основанное на сравнении данных изображения с опорными или хранимыми данными. Информация о состоянии может включать в себя состояние использования (например, приведенное в действие, не приведенное в действие) каждой педали 12. Информация о состоянии для каждой педали может включать в себя индикатор, что ступни водителя расположены поблизости от педали (например, предстоящего приведения в действие, только что отпущенного приведения в действие). Информация о состоянии может включать в себя указание, что ступни водителя движутся (то есть, с педали 14 акселератора на тормозную педаль 16). Если данные электрического сигнала указывают приведение в действие, и данные изображения соответствуют приведению в действие водителем, то информация о состоянии может включать в себя подтвержденное или объявленное действительным указание. Если данные электрического сигнала указывают приведение в действие, а данные изображения не соответствуют приведению в действие водителем, то информация о состоянии может быть установлена, чтобы указывать непреднамеренное приведение в действие. Если данные электрического сигнала указывают отсутствие приведения в действие водителем, а данные изображения соответствуют приведению в действие водителем, то информация о состоянии может быть установлена, чтобы указывать препятствие. Если данные изображения не соответствуют опорным изображениям, то информация о состоянии может быть установлена, чтобы указывать, что подозревается препятствие. Состояние педали может сообщаться в другие контроллеры 110, 114, 118. Другие контроллеры 110, 114, 118 могут использовать состояние педали для модификации операции, которая основана на педалях.
Система 100 выявления объектов в углублении для ног в полу кузова также может использоваться для определения, что транспортное средство надлежащим образом реагирует на команды водителя. Сигналы обратной связи транспортного средства могут контролироваться, чтобы выявлять ситуации, в которых педали приводятся в действие силами, иными, чем водитель. Данные ускорения транспортного средства могут приниматься контроллером 104 FODS. Данные ускорения транспортного средства могут выдавать информацию касательно ускорения и замедления транспортного средства 10. Данные ускорения транспортного средства могут перекрестно проверяться с данными изображения, чтобы определять, соответствует ли поведение транспортного средства намерению водителя. Например, данные ускорения транспортного средства могут указывать, что транспортное средство ускоряется выше порогового значения. Поведение или реакция транспортного средства может быть указывающим приведение в действие педали 14 акселератора водителем. Контроллер 104 FODS может сравнивать текущие данные изображения с опорными данными изображения, чтобы определять тип использования педали. Если текущие данные изображения являются указывающими использование педали акселератора, то поведение транспортного средства и поведение водителя соответствуют. Если текущие данные изображения являются указывающими иное использование педали или отсутствие использования педали, то есть вероятность непреднамеренного объекта (например, коврика на полу), приводящего в действие педаль 14 акселератора. Контроллер 104 FODS может выводить индикатор предупреждения. Контроллер 104 FODS может выводить индикатор состояния педали, который включает в себя состояния подтвержденной операции, заблокированной педали и непреднамеренного использования. Контроллер силовой передачи может принимать состояние предупреждения и педали и ограничивать реакцию на сигнал педали акселератора. Другие педали в углублении 26 для ног в полу кузова могут контролироваться подобным образом.
CAS 118 может реализовывать различные признаки для избежания аварий. CAS 118 может включать в себя систему адаптивного автоматического поддержания скорости движения (ACC)/предупреждения столкновений (CW), которая использует радиолокационную систему для выявления объектов на пути транспортного средства. Система ACC/CW может быть выполнена с возможностью поддерживать скорость транспортного средства на выбранной скорости, когда введена в действие. Система ACC/CW может быть выполнена с возможностью использования тормоза для замедления транспортного средства. Система ACC/CW может быть выполнена с возможностью использования тормоза, чтобы приводить транспортное средство 10 к полной остановке в определенных условиях. Система ACC/CW может вызывать использование тормозов, передавая запрос торможения в контроллер 112 тормозов. Контроллер 112 тормозов может управлять тормозной системой, чтобы прикладывать запрошенное тормозное давление.
Во время операции автоматического поддержания скорости движения, ноги и ступни водителя могут быть размещены в зоне в стороне от педалей (например, исходном положении). Система ACC/CW может выводить из работы режим автоматического поддержания скорости движения, когда водитель нажимает на тормозную педаль 16. Система ACC/CW может отменять команду ускорения автоматического поддержания скорости движения, когда водитель нажимает на педаль 14 акселератора. Система 100 выявления объектов в углублении для ног в полу кузова может использоваться, чтобы гарантировать, что состояния тормозной педали 16 и педали 14 акселератора, используемые системой 118 ACC/CW, являются правильными.
Контроллер 104 FODS может контролировать данные с датчика 102 выявления объектов и датчика 110 положения тормозной педали и датчика 114 положения педали акселератора. Во время режима автоматического поддержания скорости движения, контроллер 104 FODS может контролировать датчик 114 положения педали акселератора и определять, является ли сигнал с датчика 114 положения педали акселератора указывающим приведение в действие педали 14 акселератора. Если сигнал является указывающим использование педали 14 акселератора, контроллер FODS может сравнивать данные с датчика 102 выявления объектов с хранимыми данными, соответствующими использованию педали 14 акселератора водителем. Если данные соответствуют, использование педали 14 акселератора может подтверждаться. Если данные не соответствуют, то может подозреваться непреднамеренное использование педали. Контроллер 104 FODS может передавать состояние в CAS 118. В ответ на состояние, указывающее непреднамеренное использование педали, CAS 118 может игнорировать очевидно ложный запрос ускорения с датчика 114 положения педали акселератора.
Контроллер 104 FODS может контролировать датчик 110 положения тормозной педали. Контроллер 104 FODS может сравнивать данные с датчика 102 выявления объектов с хранимыми данными, соответствующими использованию тормозной педали 16 водителем. Контроллер 104 FODS может указывать заблокированное состояние для тормозной педали 16, если датчик 110 положения тормозной педали и данные изображения не дают идентичное состояние (например, используемый тормоз или не используемый тормоз).
CAS 118 может включать в себя интерфейс 126 связи между транспортными средствами (V2V) и интерфейс 124 связи между транспортным средством и инфраструктурой (V2I), которые выдают указание объектов на пути транспортного средства 10. Например, интерфейс 124 связи V2I может принимать информацию, такую как состояние приближающихся светофоров, знаков остановки или интенсивности движения. Интерфейс 126 связи V2V может принимать информацию касательно состояния близлежащих транспортных средств, такую как скорость, ускорение и использование тормозов. CAS 118 может предупреждать водителя об объектах на пути транспортного средства 10. CAS 118 может быть выполнена с возможностью вводить в действие тормозную систему, чтобы останавливать транспортное средство 10 в случае предстоящего столкновения.
Когда выявлено присутствие объекта, который может мешать движению педалей 12, пороговые значения, связанные с функцией предупреждения столкновений, могут уменьшаться. CAS 118 может быть выполнена с возможностью автоматически использовать тормоза раньше, чем обычно. Это предоставляет транспортному средству 10 возможность останавливаться за меньшее расстояние, чем возможно иначе, вследствие объекта, мешающего педали 12.
Например, объект может мешать движению тормозной педали 16 вниз. Во время такого события, водитель может быть способен вводить в действие тормозную педаль 16 только до определенного уровня, который может не быть величиной торможения, которую требует водитель. Традиционная система ACC/CW может распознавать, что водитель использует тормозную педаль 16 и задерживать автоматический ввод в действие тормозов. Улучшенная функция предупреждения столкновений может принимать информацию касательно объекта в углублении 26 для ног в полу кузова, который может быть мешающим движению тормозной педали 16. В ответ на информацию, CAS 118 может автоматически использовать тормоза, чтобы обеспечивать уровень замедления для предотвращения события столкновения, при наличии движения тормозной педали.
Пороговые значения предупреждения столкновений, которые уменьшены, могут быть теми пороговыми значениями, которые относятся к выявлению объектов на пути транспортного средства 10. Функция предупреждения столкновений может быть выполнена с возможностью увеличивать расстояние от целевого объекта, на котором следует формировать указание предупреждения столкновений. Это может давать возможность более раннего уведомления водителя о потенциально возможном объекте на пути транспортного средства 10. Это дает водителю большее время, чтобы реагировать на предупреждение о столкновении. С добавочным временем, водитель может быть способен убрать препятствие из зоны педалей. CAS 118 также может быть выполнена с возможностью увеличивать расстояние от целевого объекта, на котором система предупреждения столкновений использует тормоза для снижения скорости транспортного средства. Это может предоставлять CAS 118 возможность компенсировать объект, который мешает движению тормозной педали 16.
CAS 118 может быть выполнена с возможностью задерживать автоматический ввод в действие тормозов, когда ступня водителя находится на тормозной педали 16. Когда объект выявлен в углублении 26 для ног в полу кузова, CAS 118 может быть выполнена с возможностью давать возможность автоматического ввода в действие тормозов независимо от присутствия ступни водителя на тормозной педали 16. Этот признак дает возможность автоматического торможения в ответ на объект, выявленный в углублении 26 для ног в полу кузова, который может мешать торможению водителя.
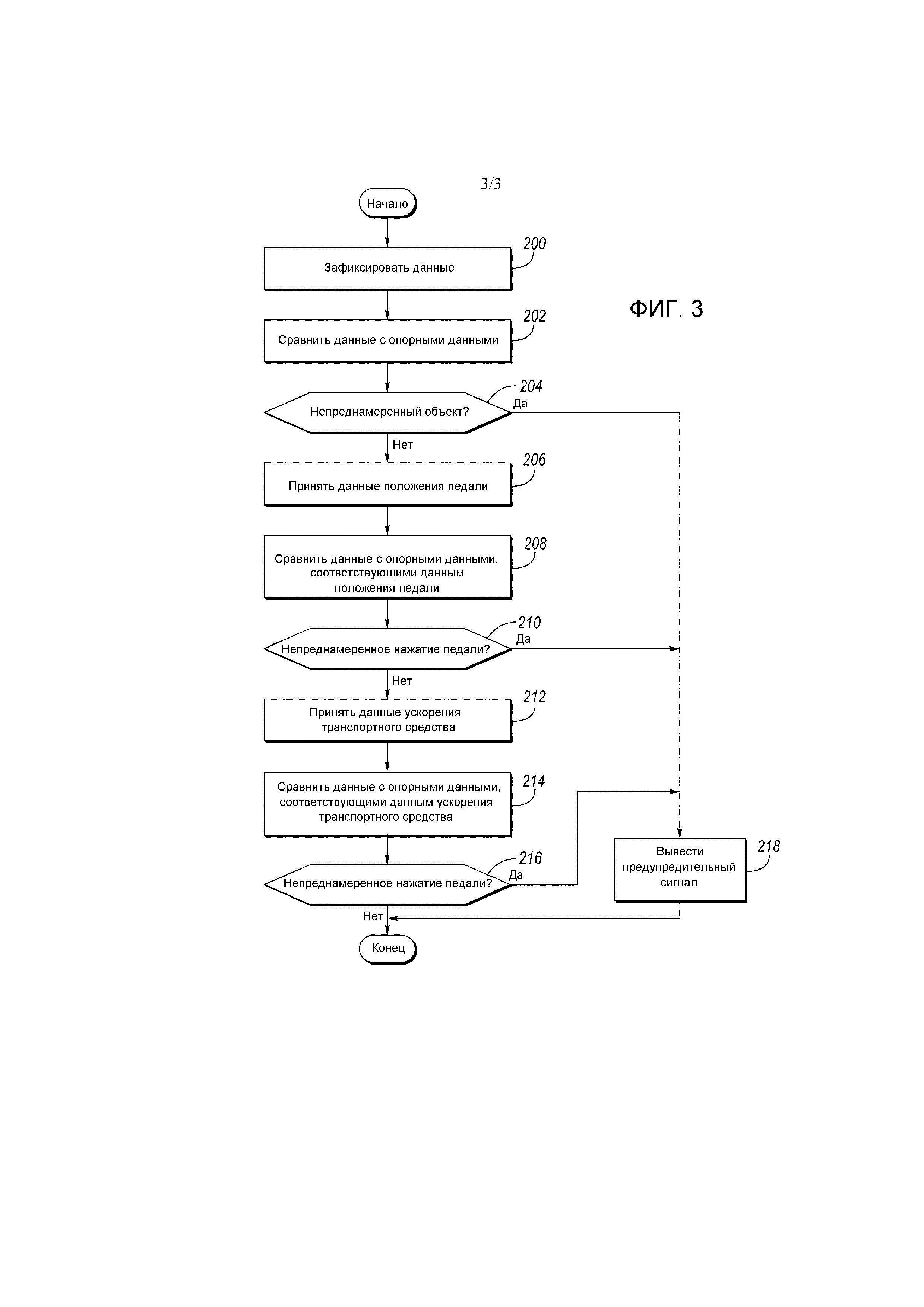
Фиг.3 изображает блок-схему последовательности операций способа возможной последовательности операций, которая может быть реализована в контроллере 104 FODS для выработки и вывода предупредительного сигнала. На операции 200, фиксируются данные, представляющие собой текущее состояние углубления 26 для ног в полу кузова. На этапе 202, данные сравниваются с опорными данными для выявления любых непреднамеренных объектов в углублении 26 для ног в полу кузова. На операции 204, последовательность выполнения может быть изменена, если выявлен непреднамеренный объект. Если сравнение дает в результате выявление непреднамеренного объекта, то выполнение может переходить на операцию 218. На операции 218, выводится предупредительный сигнал. Предупредительный сигнал может вводить в действие слышимый индикатор 106 и/или видимый индикатор 108.
Если сравнение операции 202 дает в результате отсутствие выявления непреднамеренных объектов, операция 204 может переводить выполнение на операцию 206. На операции 206, могут приниматься данные о положении педали. На операции 208, данные, представляющие собой текущее состояние, сравниваются с опорными данными, соответствующими данным о положении педали. На операции 210, последовательность выполнения может быть изменена, если выявлено непреднамеренное использование педали. Если выявлено непреднамеренное использование педали, выполнение переводится на операцию 218, которая вырабатывает выходной предупредительный сигнал.
Если сравнение операции 208 не дает в результате выявления непреднамеренного использования педали, то выполнение может переходить на операцию 212. На операции 212, могут приниматься данные ускорения транспортного средства. На операции 214, данные, представляющие собой текущее состояние, сравниваются с опорными данными, соответствующими данным ускорения транспортного средства. На операции 216, последовательность выполнения может быть изменена, если выявлено непреднамеренное использование педали. Если выявлено непреднамеренное использование педали, выполнение переводится на операцию 218, которая вырабатывает выходной предупредительный сигнал. В некоторых конфигурациях, последовательность операций может быть изменена. Результат операций сравнения также может включать в себя определение состояния педали. В некоторых конфигурациях, может быть включена в состав дополнительная операция вывода состояния педали.
Другие модули управления в транспортном средстве 10 могут принимать предупредительный сигнал и состояние педали, и выполнять операции на основании этих сигналов. Операции могут включать в себя запрещение функций, а также изменение управляющих воздействий. Операции могут включать в себя автоматическое приведение в действие различных функций управления, таких как торможение.
В некоторых конфигурациях, система 100 выявления объектов в углублении для ног в полу кузова может использоваться для улучшения функций CAS 118. CAS 118 может определять ожидаемое управляющее воздействие, которое должно быть предпринято (например, торможение, ускорение, управление направлением движения). Система 100 выявления объектов в углублении для ног в полу кузова может выдавать информацию о том, совместимы ли управляющие воздействия водителя с ожидаемым управляющим воздействием. Система 100 выявления объектов в углублении для ног в полу кузова может выводить состояние педали для каждой из педалей 12, как описано. CAS 118 может сравнивать состояние педали с ожидаемым состоянием педали. Например, транспортное средство может быть приближающимся к красному светофору, на котором может ожидаться, что водитель должен тормозить (например, ожидаемым состоянием педали является используемая тормозная педаль). Транспортное средство 10 может принимать информацию о ситуации красного светофора из интерфейса 124 V2I. Контроллер 104 FODS может сравнивать текущее состояние углубления 26 для ног в полу кузова с опорными состояниями, чтобы определять состояние педали для каждой из педалей 12. Если состояние педали не соответствует ожидаемому состоянию педали, CAS 118 может выдавать предупреждение и инициировать корректирующее воздействие. Корректирующее воздействие может состоять в том, чтобы запрашивать использование тормозов для остановки транспортного средства 10.
В качестве еще одного примера, транспортное средство 10 может быть остановлено на красный свет светофора. Красный свет светофора может меняться на зеленый свет. Состояние светофора может приниматься из интерфейса 124 V2I. Кроме того, информация касательно ближайших транспортных средств может приниматься через интерфейс 126 V2V. CAS 118 делать вывод, что транспортное средство 10 должно ускоряться в ответ на зеленый свет (например, ожидаемым состоянием педали является используемая педаль акселератора). Контроллер 104 FODS вновь может сравнивать текущее состояние углубления 26 для ног в полу кузова с опорными состояниями, чтобы определять состояние педали. Если состояние педали не соответствует ожидаемому состоянию педали, то CAS 118 может выдавать предупредительный сигнал.
Последовательности операций, способы или алгоритмы, раскрытые в материалах настоящей заявки, могут быть подлежащими выполнению/реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя существующий программируемый электронный блок управления или специальный электронный блок управления. Подобным образом, последовательности операций, способы или алгоритмы могут храниться в качестве данных и инструкций, исполняемых контроллером или компьютером, в многих формах, в том числе, ноне в качестве ограничения, информации, постоянно хранимой на незаписываемом запоминающем носителе, таком как устройства ПЗУ (постоянного запоминающего устройства, ROM), и информации, с возможностью изменения хранимой на записываемом запоминающем носителе, таком как гибкие диски, магнитные ленты, CD (компакт-диски), устройства ОЗУ (оперативного запоминающего устройства, RAM) и другие магнитные и оптические носители. Последовательности операций, способы или алгоритмы также могут быть реализованы в программном исполняемом объекте. В качестве альтернативы, последовательности операций, способы или алгоритмы могут быть воплощены полностью или частично с использованием пригодных аппаратных компонентов, таких как специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинации аппаратных средств, программных средств и программно-аппаратных компонентов.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема раскрытия и могут быть желательными для конкретных применений.
Реферат
Транспортное средство содержит углубление для ног с водительской стороны, включающее в себя множество педалей; датчик, выполненный с возможностью захватывать изображение углубления для ног с водительской стороны; и контроллер, запрограммированный в ответ на различие между упомянутым изображением и опорными изображениями углубления для ног, указывающее на наличие объекта в углублении для ног, который препятствует приведению в действие одной или более из педалей, выводить предупредительный сигнал. Обеспечивается выявление педалей с заблокированным управлением в транспортном средстве. 3 н. и 16 з.п. ф-лы, 4 ил.
Комментарии