Способ обработки зубчатых изделий с пространственно-модифицированными зубьями - SU1468691A1
Код документа: SU1468691A1
Чертежи

Описание
Изобретение относится к машиностроению , в частности к изготовле- .нию зубчатых изделий пространственного зацепления.
Цель изобретения - расширение технологических возможностей за счет обработки зубьев с двухпараметрическим огибанием,
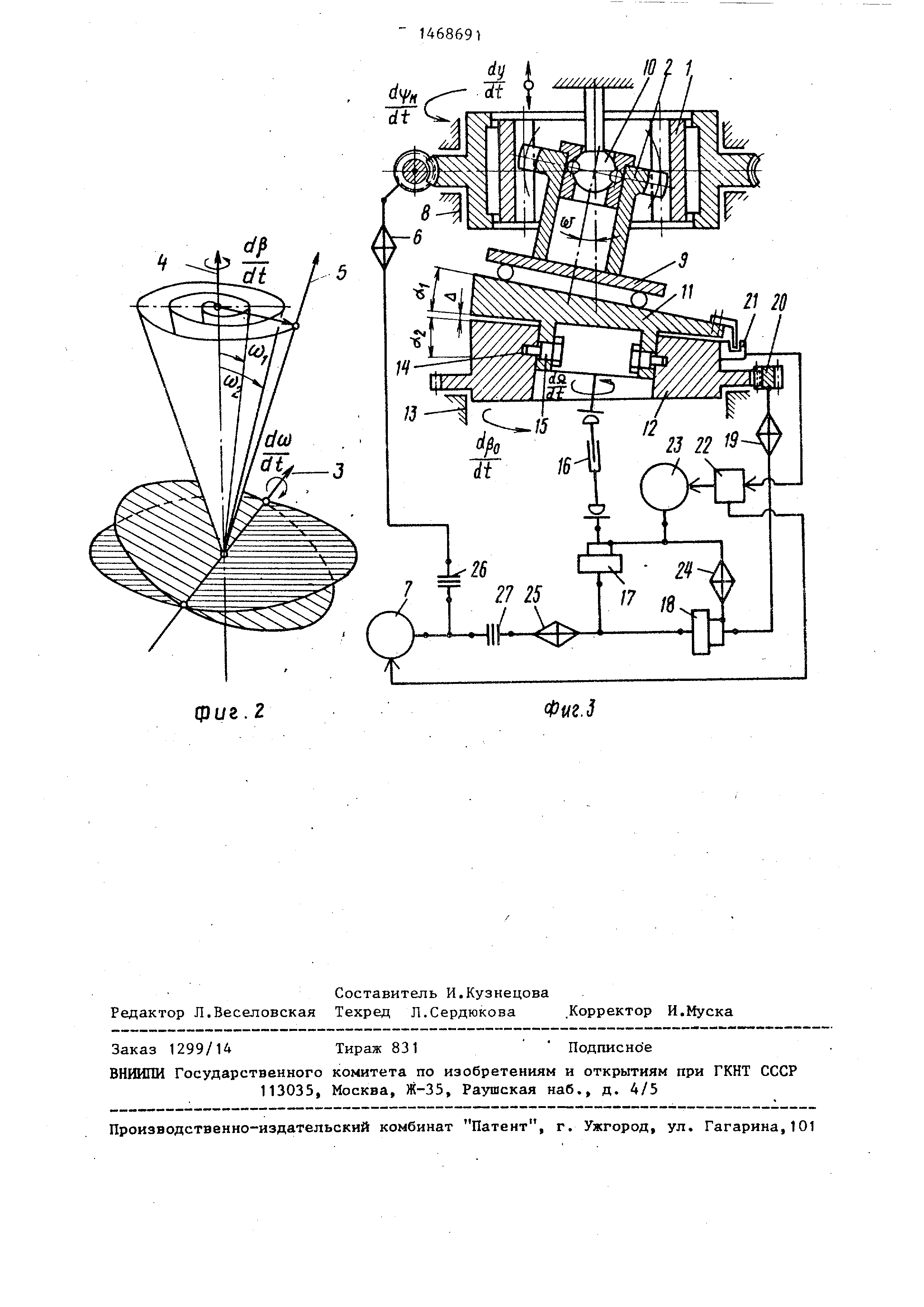
На фиг,1 изображено исходное относительное расположение инструмента
и изделия; на фиг,2 - последовательные положения осей изделия при обработке; на фиг.З - структурная схема станка для осуществления способа обработки зубчатых изделий с
пространственно-модифицированными зубьями.
На фиг,3 приняты следующие обозначения: dOJ/dt и d/i/dt - угловые нутации и прецессии издёЛИЯ; UJ И LD2 углы нутацни соответственно аа один и два полных пре цессиональных качания изделця) /dt - угловая скорость непрерывного доворота инструмента вокруг своей продольной ОСИ) dy/dt - скорость возвратно-поступательного движения инструмента dfl/dt и d/3/dt - угловые скорости вращения верхнего и нижнего кулачков о1,- углы наклна верхнего и нижнего кулачков.
Для обработки пространственно- модифицированных зубьев используют инструмент 1 внутреннего зацепления например .зубчатый- хон или зубчатьм шевер, одновременно охватывающий все зубья изделия 2. В процессе обработки зубчатый инструмент 1 дово- рачивают вокруг его продольной оси dVn/dt на величину, обеспечивающую рабочую нагрузку, и перемещают возвратно-поступательно со скоростью dy/dt, а обрабатываемое изделие 2 поворачивают dw/dt вокруг оси нута- ции 3, которой сообщают вращение dp/dt вокруг оси прецессии 4, причем изделие 2 Остается постоянно неподвижным относительно оси 5. При этом для обеспечения равномерного припуска от формообразующих движений изделия 1 за весь период- обработки должно вьшолняться следующее условие:
К,,41)
где К и К, - коэффициенты пропорциональности;
ы ,/i - углы нутации и прецессии изделия соответственно .
Коэффициенты пропорциональности К и К, определяются по следующим формулам:
К,
(2)
К,
(3)
Moikc
1.1ч
2
где со цд(,, и . максимальные углы нутации к прецессии соответственно. Для обеспечения простоты расчетов можно записать
21Г n t.
(4)
где n - частота вращения оси прецессии i t - время обработки изделия 2.
Учитывая формулы (2), (3) и (4) и дифференцируя (1), получим вьфа- Жение, при котором поворот изделия 1 и вращение его оси нутации производится согласованно в соответствии со следующей зависимостью:
tx .
2ГГп t
dt
(5)
Для исключения влияния неточности доворота d()/ p/dt инструмента 1 на формообразующие движения и в итоге на точность формы зубьев изделия 2 доворот инструмента 1 производится до поворота du;/dt изделия 2, причем выполняется непрерывно на величину , не превьшающую суммарные накопленные угловые погрешности шагов зубьев изделия 2 и инструмента 1.
Анализ относительных движений изделия и инструмента показал, что за счет того, что зубчатое изделие поворачивают вокруг оси нутации, которой сообщают вращение вокруг оси прецессии, обеспечиваются все движения , необходимые для обработки пространственно-модифицированных зубьев, при этом повышается производительность и точность обработки.
Предлагаемый способ может быть реализован на станке, имеющем следующую структурную схему.
Зубчатый инструмент 1 (фиг. 3) внутреннего зацепления установлен посредством .щпоночного соединения в инструментальном стакане, который через червячное зацепление и орган 6 настройки, например гитару сменных колес, связан с двигателем 7. Причем инструмент 1 смонтирован с возможностью возвратно-поступательного движения dy/dt относительно инструментального стакана, который расположен на вертикальном суппорте 8 с возможностью доворота dVp/dt. 06- рабатьшаемое изделие 2 закрепляется на подшипниковой опоре 9 за счет по,цжатия шарнира 10. Подшипниковая опора 9 установлена на верхнем торцовом кулачке 11, расположенном на нижнем торцовом кулачке 12 с возможностью поворота d5i/dt, при этом поверхности кулачков 11 и 12 наклонены друг к другу под углами /, d . Нижний кулачок 12 смонтирован на столе 13 с возможностью поворота и имеет окружной паз 14, взаимодействующий с пальцем 15
верхнего кулачка 11. Окружной паз 14 и палец 15 представляют собой привод подъема верхнего кулачка 11 относительно нижнего 12 при взаимном повороте . Окружной паз 14 имеет криволинейный профиль, представляющий собой огибающую цилиндра, образованную при движении его оси по линии, описанной уравнением
l-(k+l)sin2w
cos ui
(6)
Z5 - величина подъема верхнего кулачка 11 относительно нижнего 12;
1 - расстояние от оси шарнира 10 до поверхности верхнего кулачка 1 1 при
k - L-1 - толщина верхнего кулач- 20 ления 26 отключается и включаются
ка 11 по оси инструмента 1 при ы 0;
L - расстояние от оси шарнира 10 до поверхности нижнего кулачка 12 по оси инструмента 1 j
ы - угол перекоса оси изделия 8 относитель}1о инструмента 1.
муфта 27 сцепления и двигатель 23 привода поворота изделия 8 вокруг оси нутации. При этом обрабатьшае- мое изделие поворачивается dw/dt 25 вокруг оси нутации (фиг.2), а ось нутации вращается dp/dt вокруг оси прецессии (фиг.2), причем поворот doi/dt и вращение dft/dt выполняются согласованно в соответствии с зави симостью (5) .
Здесь
(л)
W
где М - угол поворот а верхнего кулака 11 относительно нижнего 12, соответствующий требуемому углу перекоса w осей иделия 8 и инструмента 1. Верхний кулачок 11 кинематически связан с нижним кулачком 12 цепью поворота изделия 8 вокруг оси нутации через шпиндель 16, дифференциалы 17 и 18, гитару 19 настройки и кинематическую цепь 20. Цепь поворота изделия вокруг оси нутации содержит также датчик 21 положения, систему 22 управления и двигатель 23 переменной скорости вращения, свя- занньй с дифференциалами 17 и 18 через коробку 24 скоростей, предназначенную для изменения направления вращения. Кроме того, верхний кулачок 11 посредством кинематической цепи 16, 17 и нижний кулачок 12 посредством кинематической цепи 20, 19, 18 через гитару 25 настройки связаны с двигателем 6 постоянной скорости вращения. Муфты 26 и 27 сцепления предназначены для включе1468691
ния и Отключения кинематических це-- пей при обработке пространственно- модифицированных зубьев.
В процессе обработки изделия 2 зубчатому инструменту 1, установленному на шпонке в инструментальном стакане, сообщают возвратно-поступательные движения dy/dt, осуществляемые , например, пневмо цилиндром, и равномерный доворот , выполняемый на величину, не превышающую суммарные накопленные угловые погрешности шагов зубьев изделия и
инструмента 1, которьм производится двигателем 7 через шпонку, инструментальный стакан, червячное зацепление гитару 6 настройки и муфту 26 сцепления. После чего муфта сцепмуфта 27 сцепления и двигатель 23 привода поворота изделия 8 вокруг оси нутации. При этом обрабатьшае- мое изделие поворачивается dw/dt 5 вокруг оси нутации (фиг.2), а ось нутации вращается dp/dt вокруг оси прецессии (фиг.2), причем поворот doi/dt и вращение dft/dt выполняются согласованно в соответствии с зависимостью (5) .
Поворот на угол to вокруг оси нутации зубчатого изделия 2 (фиг.З), установленного на подшипниковой опоре 9 и поджатого шарниром 10, производится за счет поворота верхнего кулачка 11 относи1«ельно стола 13 и противоположного поворота нижнего кулачка 12 относительно стола 13 на углы У :
0
5
40
1 arccos 2
(7)
Дифференцируя выражение (7), получим формулу для определения угловой g скорости поворота d-y/dt кулачков 11 и 12 относительно стола 13
dj dt
1
dii) dl
(8)
0
5
Противоположное переменное вращение d|/dt кулачков 11 и 12 производится двигателем 23 переменной скорости вращения за счет системы 22 управления и датчика 21 положения, посредством кинематических цепей 17, 16 и 24, 18, 19, 20. Сигнал от датчика 21 положения к системе 22 управления поступает в зависимости от угла поворота кулачка 11 относительно кулачка 12, при этом система 22 управления изменяет угловую скорость поворота dy/dt кулачков 11 и 12 в зависимости от угла U, перекоса осей изделия относительно инструмента 1, который определяется следующей зависимостью:
tu 2cL cos -Y- .
При повороте кулачка 11 относительно кулачка 12 за счет привода подъема верхнего кулачка 11, выполненного в виде пальца 15, закрепленного на верхнем кулачке 11, взаимо- дейст зующего с окружным пазом 14, изготовленным на нижнем кулачке 12 в соответствил с зависимостью (6), производится постоянное поджатие подшипниковой опоры 9 к изделию 8.
Вращение dp/dt оси нутации изде- ЛИЯ 8 вокруг оси прецессии производится за счет однонаправленного равномерного вращения кулачков 11 и 12 с равными угловыми скоростями d/i/dt, которые выполняются от двигателя 6 постоянной скорости вращения через муфту 27 сцепления гитару настройки, кинематические цепи 17, 16 верхнего кулачка 11 н„18, 19, 20 нижнего кулачка.
Для обеспечения -согласованного поворота du)/dt изделия 2 вокруг оси нутации и вращения dp/dt оси нутации вокруг оси прецессии в. соответсвии с зависимостью (5) система 22 управления связана с двигателем 7.
Таким образом, поворот dU /dt зубчатого изделия 2 вокруг оси нутации и вращение dp/dt его оси нутации вокруг оси прецессии происходит за счет суммарных вращений верхнего dR/dt и нижнего dp/dt кулачков 11 и 12, выполняемых двигателями 7, 23 и суммируемых дифференциалами 17, :18 их кинематических цепей. При этом суммарные вращения верхнего 11 и dp/dt нижнего 12 кулачков складываются из постоянного вращения d/4/dt и переменного d-y/dt в зависимости от его направления и определяются по формулам:
1 IP + 1 dt dt ГГТ. Ti dt
(9)
|, dfbp d 1
d t - ,
dcu
ТЕ
(10)
0
5 О
0
5
0
5
Доворот инструмента может производиться до поворота изделия, причем выполняется непрерывно на величину, не превышающую суммарные накопленные угловые погрешности шагов зубьев изделия и инструмента.
Вследствие того, что зубчатое изделие поворачивают вокруг оси нутации , которой сообщают вращение вокруг оси прецессии, исключается возможность противоположного доворота инструмента , возникающего от поворота изделия вокруг неподвижной оси, лежащей в диаметральной плоскости перпендикулярно своей продольной оси. При этом снижаются отклонения формы зубьев изделий и повьш1ается их точность . Вследствие того, что изделие поворачивают вокруг оси нутации и согласованно производят прецессиональ- ное его качание, выполняемое в соответствии с представленной зависимостью , обеспечивается обработка зубьев с двухпараметрическим огибанием рабочих поверхностей, предназначенных для изделий, эксплуатирующихся при измеряющемся перекосе осей. Кроме того, за счет согласованного поворота и качания изделия реализуется равномерный припуск и его съем, инструментом при обработке. В связи с этим расширяются технологические возможности способа и увеличивается производительность обработки. Так как. доворот инструмента при обработке производится до поворота изделия, причем вьшолняется непрерывно на величину, соответствующую суммарньм накопленным угловым погрешностям шагов зубьев изделия и инструмента, снижаются технологические погрешности формы зубьев, возникающие ввиду противоположного доворота инструмента в период поворота изделия вокруг оси кутации. Кроме того, повышается производительность обработки, так как исключается съем лишнего металла в повернутом состоянии изделия ввиду неравномерного доворота инструмента. Съем при.пуска выполняется за счет накопленных погрешностей шага, затем при повороте изделия производится модификации зубьев за счет только формообразующих движений . Формула изобретения
1. Способ обработки зубчатых изделий с пространственно-модифицированными зубьями одновременно охватывающим все зубья изделия инструментом , исходное положение которого соосно с изделием, ось которого совпадает с осью прецессии, притом обработку осуществляют в условиях возвратно-поступательного перемещения и согласованных поворотов инструмента вокруг своей продольной оси и изделия вокруг оси нутации, расположенной в плоскости центрального поперечного сечения зубчатого вен- . да изделия перпендикулярно его продольной оси, отличающий- с я тем, что, с целью расширения технологических возможностей за счет обработки зубьев с двухпараметри- ческим огибанием, зубчатому изделию сообщают дополнительньй поворот во-
круг осей нутации и прецессии в отношении с зависимостью
00du .1 d /i
« d dE
dCJ dt
MOIKC
dji dt
W
2ff-n-t
угловые скорости прецессии и нутации соответственно; максимальный угол поворота ИЗДЕЛИЯ} частота вращения оси прецессии;
время обработки зубчатого изделия.
. Способ по п. 1, отли- .чающийся тем, что величин дополнительного доворота не превышает допускаемые суммарные накопленные угловые погрешности щагов зубьев изделия и инструмента.
макс
п t




Реферат
Изобретение относится к машиностроению , в частности к изготовлению зубчатых изделий пространственного зацепления. Цель изобретения - расширение технологических возможностей за счет обработки зубьев с двухпараметрическим огибанием . Обработка зубчатых изделий с пространственно-модифицированными зубьями осуществляется инструментом, одновременно охватывающим все зубья изделия. При этом изделию сообщают поворот вокруг неподвижной оси, лежащей в диаметральной плоскости перпендикулярно своей продольной оси, и прецессиональное качание по конической поверхности, вершина которой расположена в диаметральной плоскости изделий, а инструмент довора- чивают вокруг своей продольной оси и перемещают возвратно-поступательно . Зубчатое изделие поворачивают вокруг оси нутяции, которой сообщают вращение вокрув оси прецессии, при этом поворот изделия и вращение его оси нутации производится согласованно , Доворот инструмента производится до поворота изделия, причем вьтолняется непрерьгоно на величину, не превышающую суммарные накопленные угловые погрешности шагов зубьев изделий и инструмента, 1 з,п, ф-лы, 3 ил, ф сл 4 О5 00
Формула
Комментарии