Устройство помощи при вождении и способ помощи при вождении - RU2576362C2
Код документа: RU2576362C2
Чертежи












Описание
Область техники
[0001] Настоящее изобретение относится к устройству помощи при вождении и способу помощи при вождении.
Предшествующий уровень техники
[0002] Известно устройство помощи при вождении, которое предоставляет помощь при вождении посредством обнаружения сплошного объекта вокруг транспортного средства. Например, этот тип устройства помощи при вождении обрабатывает захваченное изображение, выводимое хронологически из средства формирования изображений, чтобы обнаруживать сплошной объект.
[0003] Например, патентный документ 1 раскрывает устройство обнаружения помех, допускающее реализацию обнаружения сплошных объектов. Устройство обнаружения помех содержит реальную камеру, которая фотографирует окрестности транспортного средства, и средство обнаружения помех для обнаружения сплошного объекта с использованием изображения окрестностей транспортного средства, вводимого из реальной камеры. Средство обнаружения помех преобразует точку наблюдения изображения окрестностей транспортного средства из реальной камеры и обнаруживает сплошной объект с использованием разностного изображения, которое соответствует различию между двумя хронологически различными изображениями вида с высоты птичьего полета.
Документы предшествующего уровня техники
Патентные документы
[0004] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) № 2008-227646
Краткое изложение сущности изобретения
[0005] Тем не менее, касательно технологии, раскрытой в патентном документе 1, если различие между двумя хронологически различными изображениями вида с высоты птичьего полета используется при обнаружении сплошных объектов, когда транспортное средство поворачивает, например, отображение поверхности дороги ложно распознается в качестве сплошного объекта и возможно приводит к снижению точности обнаружения, поскольку изменение в поведении транспортного средства включается в разностное изображение в качестве шума.
[0006] С учетом этой ситуации, настоящее изобретение нацелено на то, чтобы подавлять снижение точности обнаружения, обусловленное состоянием поворачивания транспортного средства при обнаружении сплошных объектов.
Средство решения задачи
[0007] Чтобы разрешать эту проблему, настоящее изобретение имеет средство обнаружения состояния поворачивания для обнаружения состояния поворачивания основного транспортного средства. Когда средство обнаружения состояния поворачивания обнаруживает то, что основное транспортное средство находится в состоянии поворачивания, средство модификации областей обнаружения изменяет позицию области обнаружения относительно основного транспортного средства либо форму или площадь области обнаружения на основе состояния поворачивания основного транспортного средства.
[0008] Согласно настоящему изобретению, если основное транспортное средство находится в состоянии поворачивания, чтобы предотвращать ложное распознавание сплошного объекта, область, которая имеет тенденцию формировать ложное распознавание сплошного объекта, может исключаться при выполнении распознавания посредством изменения позиции области обнаружения относительно основного транспортного средства либо посредством изменения формы или площади области обнаружения на основе состояния поворачивания основного транспортного средства, и за счет этого может управляться ложное распознавание сплошных объектов. В силу этого, можно подавлять снижение точности обнаружения, обусловленное состоянием поворачивания транспортного средства при обнаружении сплошных объектов.
Краткое описание чертежей
[0009] Фиг.1 является пояснительной схемой, схематично иллюстрирующей конфигурацию устройства помощи при вождении.
Фиг.2 является блок-схемой, функционально иллюстрирующей конфигурацию устройства помощи при вождении согласно первому варианту осуществления.
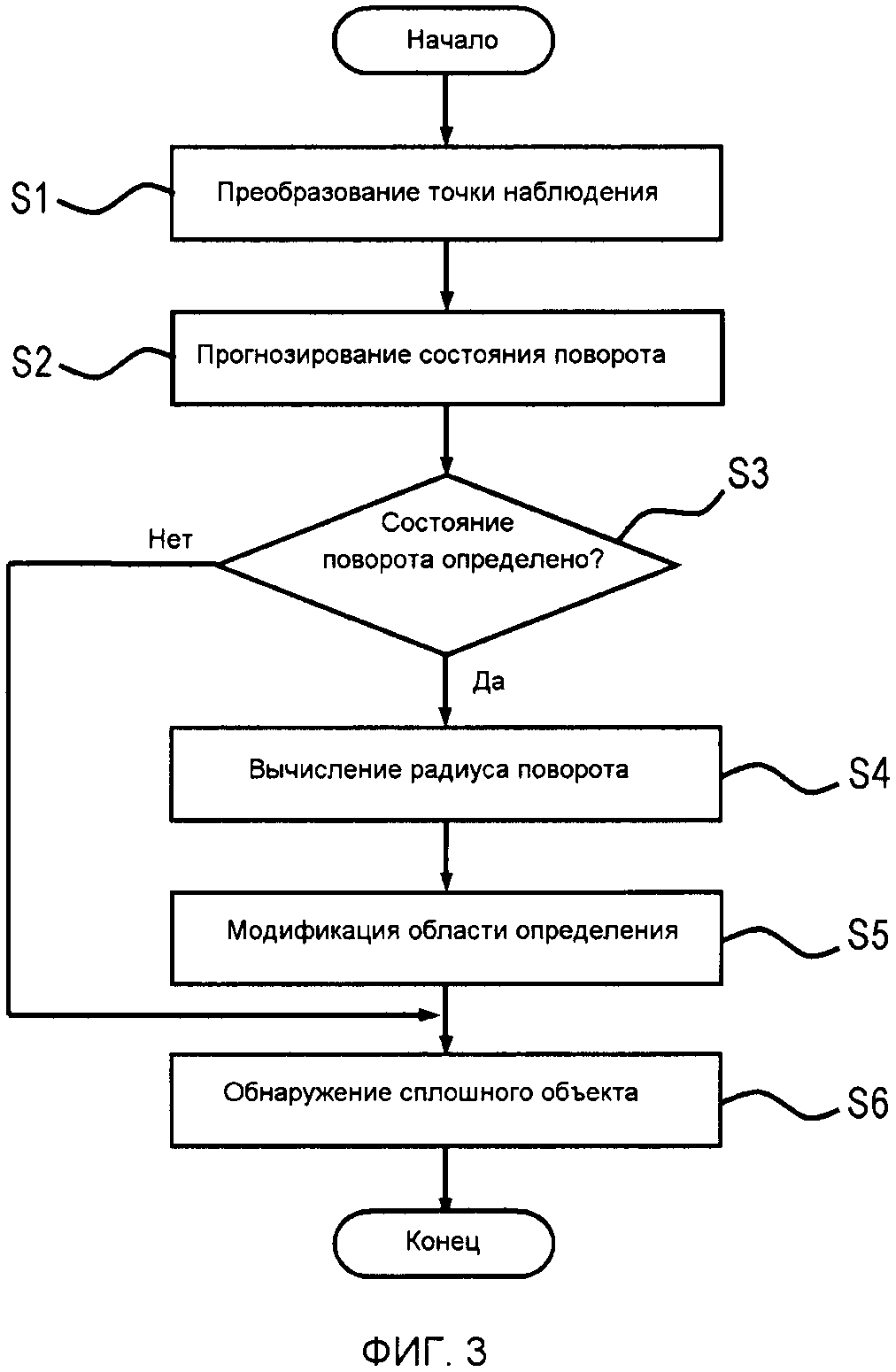
Фиг.3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций, выполняемую посредством устройства помощи при вождении.
Фиг.4 является блок-схемой последовательности операций способа, детализирующей процедуры для обнаружения сплошных объектов, используемого на этапе 6.
Фиг.5 является схемой для описания областей Ra, Rb обнаружения.
Фиг.6 является схемой для описания состояния, в котором форма областей Raa, Rba обнаружения модифицируется во время состояния поворачивания.
Фиг.7 является схемой для описания состояния, в котором форма областей Ra, Rb обнаружения не модифицируется во время состояния поворачивания.
Фиг.8 является схемой для описания состояния, в котором форма областей Rab, Rbb обнаружения модифицируется во время состояния поворачивания.
Фиг.9 является схемой для описания состояния, в котором форма областей Rac, Rbc обнаружения модифицируется во время состояния поворачивания.
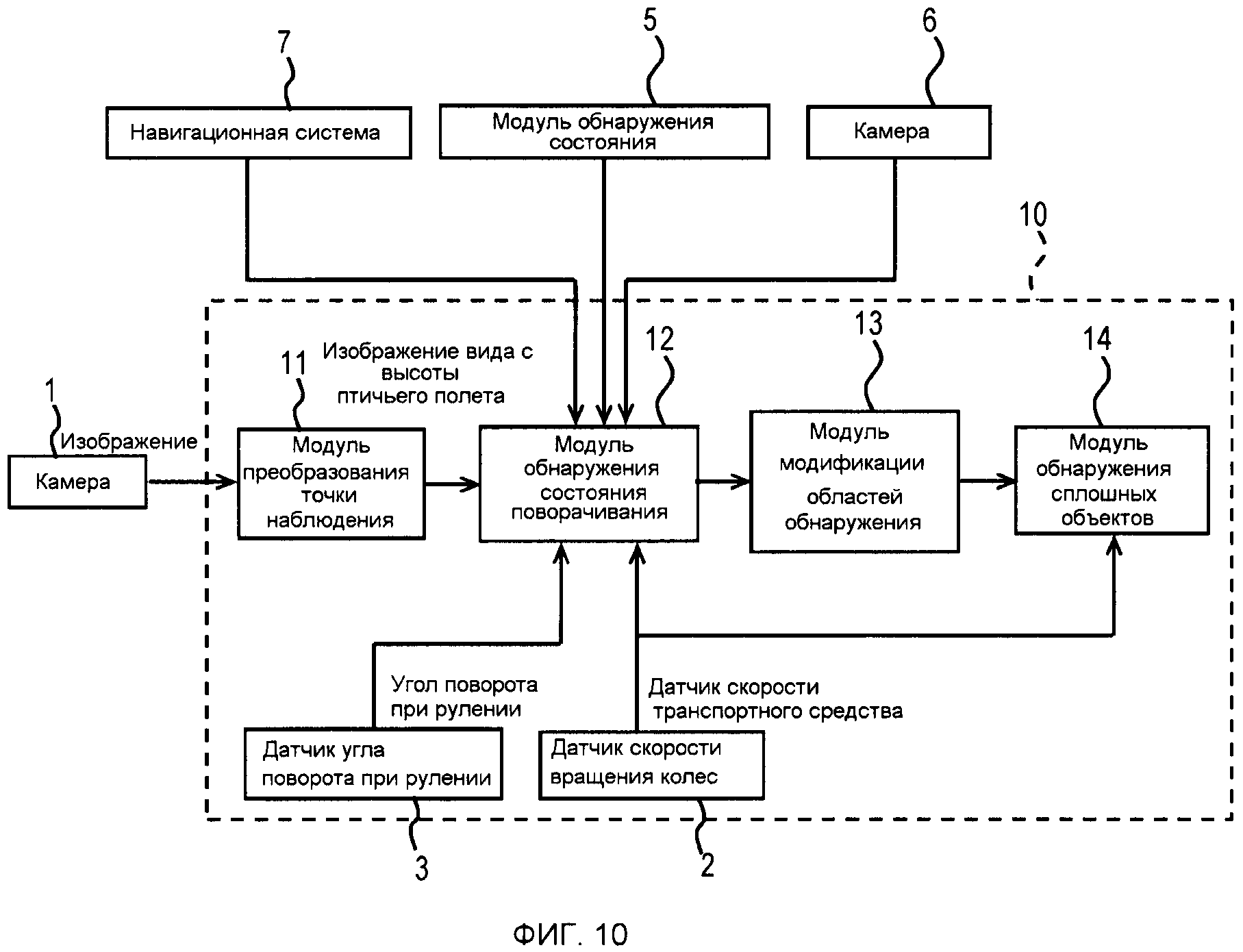
Фиг.10 является блок-схемой, функционально иллюстрирующей конфигурацию устройства помощи при вождении согласно четвертому варианту осуществления.
Фиг.11 иллюстрирует один пример областей Raa, Rba обнаружения на круговой развязке (пример 1).
Фиг.12 иллюстрирует один пример областей Raa, Rba обнаружения на круговой развязке (пример 2).
Фиг.13 иллюстрирует один пример взаимосвязи между скоростью возврата для возвращения областей Raa, Rba обнаружения в начальное состояние и величиной возврата рулевого колеса.
Фиг.14 является схемой для описания способа, используемого для обнаружения величины возврата рулевого колеса.
Фиг.15 является схемой для описания другого варианта осуществления, в котором область обнаружения модифицируется во время состояния поворачивания.
Описание предпочтительных вариантов осуществления изобретения
[0010] Первый вариант осуществления
Фиг.1 является пояснительной схемой, схематично иллюстрирующей конфигурацию устройства помощи при вождении согласно настоящему варианту осуществления. Устройство помощи при вождении обнаруживает движущееся сзади транспортное средство, приближающееся сзади транспортного средства (основного транспортного средства), и конфигурируется главным образом посредством контроллера 10.
[0011] Контроллер 10 функционирует с возможностью полностью управлять всей системой, и, например, контроллер 10 может использовать микрокомпьютер, сконфигурированный главным образом с помощью CPU, ROM, RAM и интерфейса ввода-вывода. Контроллер 10 выполняет различные вычисления, необходимые для помощи при вождении, в соответствии с управляющими программами, сохраненными в ROM. Контроллер 10 принимает информацию, вводимую из камеры 1, датчика 2 скорости вращения колес и датчика 3 угла поворота при рулении.
[0012] Камера 1 может размещаться, например, на высоте h над поверхностью дороги и помещаться в задней части основного транспортного средства Ca, под углом θ (верхним ракурсом), сформированным посредством горизонтальной плоскости на высоте камеры и центром камеры; камера 1 может иметь встроенный датчик изображений (например, CCD- или CMOS-датчик). Как проиллюстрировано на фиг.1, камера 1 периодически захватывает окружение, включающее в себя предварительно определенную (нижеописанную) область обнаружения, и в силу этого хронологически выводит захваченное изображение (средство формирования изображений).
[0013] Датчик 2 скорости вращения колес предоставляется на каждом из переднего, заднего, левого и правого колеса и обнаруживает скорость вращения колеса. Датчик 2 скорости вращения колес обнаруживает эквивалентную скорость транспортного средства для основного транспортного средства Ca через скорость вращения каждого из колес. Датчик 3 угла поворота при рулении является, например, угловым датчиком, установленным на рулевой колонке или около рулевого колеса, и обнаруживает угол поворота рулевого вала в качестве угла поворота при рулении.
[0014] Фиг.2 является блок-схемой, функционально иллюстрирующей конфигурацию устройства помощи при вождении согласно настоящему варианту осуществления. В устройстве помощи при вождении контроллер 10 выполняет предварительно определенный процесс для захваченных изображений, выводимых хронологически из камеры 1, и обнаруживает движущееся сзади транспортное средство на основе изображения, полученного из обработки. В случае взятия на себя функций устройства помощи при вождении, контроллер 10 имеет модуль 11 преобразования точки наблюдения, модуль 12 обнаружения состояния поворачивания, модуль 13 модификации областей обнаружения и модуль 14 обнаружения сплошных объектов.
[0015] Модуль 11 преобразования точки наблюдения преобразует захваченное изображение, выводимое из камеры 1, в изображение вида с высоты птичьего полета (изображение с верхнего ракурса) через преобразование точки наблюдения. Изображение вида с высоты птичьего полета является преобразованием захваченного изображения из фактической камеры 1 в виртуальное изображение, захваченное с точки наблюдения (виртуальной точки наблюдения) из виртуальной камеры. Более конкретно, изображение вида с высоты птичьего полета соответствует изображению, в котором захваченное изображение из фактической камеры 1 имеет точку наблюдения, преобразованную в изображение, смотрящее вниз на землю из точки на карте на предварительно определенной высоте (другими словами, изображению, в котором захваченное изображение проецируется на поверхность дороги).
[0016] Модуль 12 обнаружения состояния поворачивания обнаруживает состояние поворачивания основного транспортного средства Ca, включающее в себя радиус поворота основного транспортного средства Ca и направление поворота, на основе информации по обнаружению из датчика 2 скорости вращения колес и датчика 3 угла поворота при рулении. Дополнительно, модуль 12 обнаружения состояния поворачивания прогнозирует состояние поворачивания основного транспортного средства Ca, включающее в себя радиус поворота и направление поворота основного транспортного средства Ca. Кроме того, модуль 12 обнаружения состояния поворачивания определяет то, находится или нет основное транспортное средство Ca в состоянии поворачивания, в соответствии с результатом обнаружения или результатом прогнозирования.
[0017] Модуль 13 модификации областей обнаружения модифицирует форму области обнаружения на основе состояния поворачивания, обнаруженного посредством модуля 12 обнаружения состояния поворачивания. Ниже описываются технологии для модификации формы области обнаружения.
[0018] Модуль 14 обнаружения сплошных объектов обнаруживает сплошной объект на основе двух хронологически последовательных изображений вида с высоты птичьего полета. Здесь, ″два хронологически последовательных изображения вида с высоты птичьего полета″ обозначают два изображения вида с высоты птичьего полета, снятые в различные времена фотографирования; например, это соответствует изображению вида с высоты птичьего полета на основе изображения, захваченного во время t1 (текущего) (упоминается ниже в качестве ″текущего изображения вида с высоты птичьего полета″), и изображению вида с высоты птичьего полета на основе изображения, захваченного во время t2 (t1-Δt (Δt: выходная частота изображения); упоминается ниже в качестве "предыдущего изображения вида с высоты птичьего полета").
[0019] Более конкретно, модуль 14 обнаружения сплошных объектов сначала совмещает два хронологически последовательных изображения вида с высоты птичьего полета, другими словами, модуль 14 обнаружения сплошных объектов совмещает текущее изображение вида с высоты птичьего полета и предыдущее изображение вида с высоты птичьего полета. Затем, модуль 14 обнаружения сплошных объектов получает разностное изображение между двумя изображениями вида с высоты птичьего полета. Модуль 14 обнаружения сплошных объектов затем обнаруживает сплошной объект на основе вычисленного разностного изображения (средство обнаружения сплошных объектов). В этом случае, модуль 14 обнаружения сплошных объектов обнаруживает сплошной объект в областях обнаружения сзади слева и сзади справа от основного транспортного средства Ca, а более конкретно, модуль 14 обнаружения сплошных объектов обнаруживает сплошной объект в области, соответствующей смежной полосе движения, в качестве движущегося сзади транспортного средства (смежного транспортного средства).
[0020] Фиг.3 и 4 являются блок-схемами последовательности операций способа, иллюстрирующими последовательность операций, выполняемую посредством устройства помощи при вождении согласно настоящему варианту осуществления. Процессы, проиллюстрированные на блок-схемах последовательности операций способа, выполняются посредством контроллера 10 с предварительно определенными периодами.
[0021] Во-первых, на этапе 1 (этап S1), когда модуль 11 преобразования точки наблюдения получает захваченное изображение из камеры 1, модуль 11 преобразования точки наблюдения выполняет преобразование точки наблюдения и формирует изображение вида с высоты птичьего полета.
[0022] На этапе 2 (этап S2), модуль 12 обнаружения состояния поворачивания прогнозирует то, находится или нет основное транспортное средство Ca в состоянии поворачивания после предварительно определенного времени (прогнозное состояние поворачивания). Более конкретно, модуль 12 обнаружения состояния поворачивания обращается к захваченному изображению из камеры 1, обнаруживает полосу движения (например, белую линию) на дороге и вычисляет кривизну полосы движения в качестве параметра, который представляет форму дороги. Модуль 12 обнаружения состояния поворачивания прогнозирует форму дороги впереди основного транспортного средства Ca, а более конкретно, состояние поворачивания основного транспортного средства Ca вплоть до точки после предварительно определенного времени, на основе вычисленной кривизны полосы движения и скорости транспортного средства, полученной из датчика 2 скорости вращения колес.
[0023] На этапе 3 (этап S3), модуль 12 обнаружения состояния поворачивания определяет то, находится или нет основное транспортное средство Ca в состоянии поворачивания. Более конкретно, модуль 12 обнаружения состояния поворачивания обращается к скорости транспортного средства, полученной из датчика 2 скорости вращения колес, и углу поворота при рулении, полученному из датчика 3 угла поворота при рулении, и вычисляет текущий радиус поворота основного транспортного средства Ca на основе следующей формулы:
[формула 1]
ρ=(1+KV2)(nL/ϕ).
[0024] В этой формуле ρ является радиусом поворота, k является коэффициентом устойчивости, V является скоростью транспортного средства, L является колесной базой, n является передаточным отношением рулевого колеса, и ϕ является углом поворота при рулении.
[0025] В завершение, когда текущий радиус поворота, вычисленный на основе формулы 1 и прогнозного радиуса поворота на этапе 2, не меньше предварительно определенного порогового значения, модуль 12 обнаружения состояния поворачивания определяет то, что основное транспортное средство Ca находится в состоянии поворачивания.
[0026] Если результат на этапе 3 определяется как утвердительный, другими словами, если основное транспортное средство Ca находится в состоянии поворачивания, обработка переходит к этапу 4 (этап S4). При этом, если результат на этапе 3 определяется как отрицательный, другими словами, если основное транспортное средство Ca не находится в состоянии поворачивания, обработка переходит к этапу 6 (этап S6).
[0027] На этапе 4, текущий радиус поворота в завершение определяется на основе радиуса поворота, вычисленного на вышеописанных этапах 2 и 3. Более конкретно, в дополнение к обращению к информации времени, модуль 12 обнаружения состояния поворачивания прогнозирует текущий радиус поворота на основе прогнозного радиуса поворота до момента после предварительно определенного времени, прогнозированного на этапе 2. Модуль 12 обнаружения состояния поворачивания сравнивает прогнозный текущий радиус поворота с радиусом поворота, вычисленным на этапе 3, и вычисляет вероятность (другими словами, степень достоверности) для прогнозного текущего радиуса поворота. Когда вероятность не меньше предварительно определенного значения определения, модуль 12 обнаружения состояния поворачивания указывает прогнозный радиус поворота после предварительно определенного времени, прогнозированного на этапе 2, в качестве конечного радиуса поворота; тогда как, когда вероятность меньше предварительно определенного значения определения, модуль 12 обнаружения состояния поворачивания в завершение определяет радиус поворота, вычисленный на этапе 3, в качестве конечного радиуса поворота.
[0028] На этапе 5, модуль 13 модификации областей обнаружения модифицирует форму области обнаружения на основе конечного радиуса поворота, указываемого на этапе 4. Как проиллюстрировано на фиг.5, области обнаружения являются квадратными областями Ra, Rb, имеющими предварительно определенную длину области в направлении FD движения и имеющими симметрию относительно основного транспортного средства Ca и предварительно определенную ширину области в направлении, ортогональном к направлению FD движения; области обнаружения задаются так, что они идут позади транспортного средства из опорных позиций Pa, Pb, которые задаются слева сзади и справа сзади от основного транспортного средства Ca в качестве точек начала отсчета. Когда основное транспортное средство Ca движется по прямой линии, области обнаружения задаются с возможностью иметь такую позицию и размер, что они находятся в смежных полосах движения сзади слева и сзади справа от основного транспортного средства Ca; тем самым опорные позиции, длины областей и ширины областей предварительно задаются в соответствии с этим.
[0029] В этой связи, когда модуль 12 обнаружения состояния поворачивания определяет то, что транспортное средство находится в состоянии поворачивания, как проиллюстрировано на фиг.6, модуль 13 модификации областей обнаружения модифицирует длину областей для областей обнаружения (областей Raa, Rba обнаружения) так, что она меньше в направлении движения, чем для областей Ra, Rb обнаружения, которые используются в качестве опорных (см. фиг.5). Дополнительно, модифицированные области Raa, Rba обнаружения задаются таким образом, что области Raa, Rba обнаружения, соответствующие внутренней части поворота, имеют большую степень модификации, чем области Raa, Rba обнаружения, соответствующие внешней части поворота. В силу этого, области Ra, Rb обнаружения, которые являются симметричными относительно основного транспортного средства Ca, модифицируются в асимметричную форму (области Raa, Rba обнаружения).
[0030] Степень модификации каждой из областей Raa, Rba обнаружения определяется в соответствии с радиусом поворота, т.е. степень модификации определяется в соответствии с радиусом поворота таким образом, чтобы исключать область обнаружения, которая может формировать ложное распознавание сплошного объекта; например, взаимосвязь устанавливается таким образом, что чем меньше радиус поворота, тем относительно большей становится степень модификации каждой из областей Raa, Rba обнаружения. Тем не менее, как описано выше, взаимосвязь устанавливается таким образом, что степень модификации различается для областей Raa, Rba обнаружения во внутренней части поворота и областей Raa, Rba обнаружения на внешней части поворота даже в идентичном состоянии поворачивания.
[0031] Например, модуль 13 модификации областей обнаружения может поддерживать карту или арифметическое выражение, или отношение соответствия между радиусом поворота и областями Raa, Rba обнаружения, модифицированными в соответствии с радиусом поворота. Таким образом, модуль 13 модификации областей обнаружения может задавать модифицированные области Raa, Rba обнаружения на основе конечного радиуса поворота, указываемого на этапе 4.
[0032] На этапе 6 (этап S6), модуль 14 обнаружения сплошных объектов обнаруживает сплошной объект. Фиг.4 является блок-схемой последовательности операций способа, детализирующей процедуры для обнаружения сплошных объектов, используемого на этапе 6.
[0033] Во-первых, на этапе 60 (этап S60), модуль 14 обнаружения сплошных объектов выполняет совмещение с использованием текущего изображения вида с высоты птичьего полета и предыдущего изображения вида с высоты птичьего полета. Здесь, ″совмещение″ означает обработку позиции в одном изображении вида с высоты птичьего полета (предыдущем изображении вида с высоты птичьего полета) так, чтобы совмещать с другим изображением вида с высоты птичьего полета (текущим изображением вида с высоты птичьего полета) таким образом, что местоположения сходятся для двух хронологически последовательных изображений вида с высоты птичьего полета для опорного неподвижного объекта в изображениях, такого как белая линия на поверхности дороги, дорожный знак или кусок грязи. Хотя доступны различные технологии для выполнения совмещения в настоящем варианте осуществления, чтобы сокращать число вычислений, используемая технология совмещения заключает в себе вычисление величины движения основного транспортного средства Ca в течение одного цикла формирования изображений камеры 1 из скорости транспортного средства и смещение одного из изображений вида с высоты птичьего полета на величину движения. Если приоритетом является точность, совмещение может быть выполнено между изображениями вида с высоты птичьего полета таким образом, что опорные неподвижные объекты совпадают, с использованием процесса согласования и т.п.
[0034] На этапе 61 (этап S61), модуль 14 обнаружения сплошных объектов формирует разностное изображение. Более конкретно, модуль 14 обнаружения сплошных объектов вычисляет разность между общими участками совмещаемого текущего изображения вида с высоты птичьего полета и предыдущего изображения вида с высоты птичьего полета и формирует результаты вычисления в качестве разностного изображения. Хотя разность может быть вычислена с использованием способа на основе абсолютной разности в значениях яркости, разность также может быть вычислена посредством выполнения обнаружения точек краев с использованием лапласова фильтра и т.д., и вычисления разности на основе позиций точек краев.
[0035] На этапе 62 (этап S62), модуль 14 обнаружения сплошных объектов выполняет пороговую обработку. Более конкретно, модуль 14 обнаружения сплошных объектов преобразует разностное изображение в двоичную форму с использованием предварительно определенного порогового значения, посредством чего область, не меньшая порогового значения, указывает сплошной объект. Дополнительно, модуль 14 обнаружения сплошных объектов обнаруживает сплошной объект в областях Ra, Rb обнаружения или модифицированных областях Raa, Rba обнаружения в качестве смежного транспортного средства (более конкретно, транспортного средства, движущегося рядом, которое является движущимся сзади транспортным средством, движущимся в смежной полосе движения).
[0036] Таким образом, в первом варианте осуществления, модуль 13 модификации областей обнаружения сравнивает случай, в котором модуль 12 обнаружения состояния поворачивания определяет то, что основное транспортное средство Ca находится в состоянии поворачивания, и случай, в котором модуль 12 обнаружения состояния поворачивания определяет то, что основное транспортное средство Ca не находится в состоянии поворачивания (фиг.5), и модифицирует форму области обнаружения таким образом, чтобы исключать область, которая может формировать ложное распознавание сплошного объекта. Другими словами, модуль 13 модификации областей обнаружения модифицирует форму и площадь областей обнаружения таким образом, чтобы сокращать длину области для области обнаружения в направлении движения, и за счет этого может исключать область, которая имеет тенденцию формировать ложное распознавание сплошного объекта из областей обнаружения.
[0037] Обнаружение сплошных объектов на основе захваченных изображений, снятых сзади транспортного средства, является таким, что чем дальше сплошной объект от основного транспортного средства Ca, тем большее влияние на разностное изображение оказывает шум, обусловленный поведением при повороте Ca транспортного средства; в силу этого существует такой недостаток, что сплошной объект может быть ложно распознан. В этот момент, согласно настоящему варианту осуществления, когда основное транспортное средство Ca находится в состоянии поворачивания, модификация формы и площади области обнаружения выполнена таким образом, чтобы исключать области обнаружения, которые могут формировать ложное распознавание сплошного объекта, тем самым позволяет по мере необходимости исключать области обнаружения, которые могут формировать ложное распознавание. В силу этого, можно подавлять снижение точности обнаружения, обусловленное состоянием поворачивания основного транспортного средства Ca.
[0038] Кроме того, модуль 13 модификации областей обнаружения модифицирует длину области в направлении движения транспортного средства области обнаружения на внутренней части поворота (областей Raa, Rba обнаружения на фиг.6) в соответствии с радиусом поворота основного транспортного средства Ca. В настоящем варианте осуществления, чем меньше радиус поворота основного транспортного средства Ca, тем короче модуль 13 модификации областей обнаружения задает длину области для области обнаружения. В силу этого, область, ближайшая к основному транспортному средству Ca, задается в ограниченной степени в качестве областей Raa, Rba обнаружения.
[0039] Согласно этой конфигурации, область еще дальше от основного транспортного средства Ca может исключаться из области обнаружения, и, следовательно, можно подавлять снижение точности обнаружения, обусловленное состоянием поворачивания основного транспортного средства Ca. Кроме того, этот тип модификации формы области обнаружения является достаточным, если выполняется, по меньшей мере, для области обнаружения на внутренней части поворота.
[0040] Как проиллюстрировано на фиг.7, если в то время, когда основное транспортное средство Ca поворачивает, область обнаружения (области Ra, Rb) задается идентично тому, когда основное транспортное средство Ca не поворачивает, области Ra, Rb обнаружения включают в себя диапазон на большом расстоянии от смежной полосы движения, и это может становиться первичным фактором снижения точности обнаружения. Тем не менее, согласно настоящему варианту осуществления, модификация длины области для области обнаружения в направлении FD движения транспортного средства тем самым позволяет расширять модифицированные области Raa, Rba обнаружения до диапазона, соответствующего смежной полосе движения. В силу этого, можно подавлять снижение точности обнаружения, обусловленное состоянием поворачивания основного транспортного средства Ca.
[0041] Кроме того, модуль 13 модификации областей обнаружения модифицирует форму и площадь отдельных областей обнаружения таким образом, что степень модификации длины области для областей Raa, Rba обнаружения, соответствующих внутренней части направления поворота, превышает длину области для областей Raa, Rba обнаружения, соответствующих внешней части направления поворота.
[0042] Как проиллюстрировано на фиг.7, области Ra, Rb обнаружения, соответствующие внутренней части направления поворота, имеют большее число областей, которые находятся на большом расстоянии от смежной полосы движения. Следовательно, обеспечение того, что степень модификации длины области в каждой внешней части и внутренней части направления поворота отличается, тем самым позволяет надлежащим образом задавать области Raa, Rba обнаружения. В силу этого, необходимый сплошной объект может быть надлежащим образом обнаружен при подавлении ложного обнаружения сплошных объектов.
[0043] Кроме того, в настоящем варианте осуществления модуль 12 обнаружения состояния поворачивания имеет средство прогнозирования состояния поворачивания для прогнозирования состояния поворачивания транспортного средства в качестве функции для него, в то время как модуль 13 модификации областей обнаружения модифицирует форму и площадь областей обнаружения, когда средство прогнозирования состояния поворачивания прогнозирует состояние поворачивания основного транспортного средства Ca. В силу этого, необходимый сплошной объект может быть надлежащим образом обнаружен при подавлении ложного обнаружения сплошных объектов.
[0044] Согласно этой конфигурации, области обнаружения могут быть модифицированы в дополнение к предупреждению состояния поворачивания, и, следовательно, можно модифицировать области обнаружения в надлежащее время.
[0045] Когда прогнозируется состояние поворачивания, и форма областей обнаружения должна быть модифицирована в соответствии с этим, модуль 13 модификации областей обнаружения может быстро выполнять модификацию, в то время как с другой стороны, при переходе из состояния поворачивания в состояние неповорачивания, и когда области обнаружения должны возвращаться в начальное состояние (опорное состояние), модуль 13 модификации областей обнаружения может медленно выполнять модификацию. В силу этого, могут подавляться ситуации, когда шум извлекается в разностном изображении вследствие состояния поворачивания основного транспортного средства, и, следовательно, может подавляться ложное обнаружение сплошного объекта. Кроме того, этот тип способа управления является, в частности, эффективным в случае, если состояние поворачивания основного транспортного средства вызывается посредством смены полосы движения посредством основного транспортного средства Ca. В этом случае, предпочтительно, чтобы контроллер 10 содержал функциональные элементы, такие как средство обнаружения намерения смены полосы движения для обнаружения намерения сменять полосу движения; вышеописанная технология может приспосабливаться, когда средство обнаружения намерения смены полосы движения обнаруживает намерение сменять полосу движения, и транспортное средство переходит из состояния поворачивания в состояние неповорачивания, и область обнаружения возвращается в начальное состояние.
[0046] Кроме того, модуль 13 модификации областей обнаружения может модифицировать форму областей обнаружения в соответствии с варьированием в продольном ускорении основного транспортного средства Ca. Продольное ускорение основного транспортного средства Ca также зачастую извлекается в разностное изображение в качестве шума, обусловленного поведением Ca транспортного средства; тем самым это инициирует возможность снижения точности обнаружения. Следовательно, учет варьирования в продольном ускорении и модификация формы области обнаружения тем самым позволяет подавлять снижение точности обнаружения, обусловленное состоянием поворачивания транспортного средства.
[0047] Второй вариант осуществления
Фиг.8 является пояснительной схемой, схематично иллюстрирующей модификацию формы областей Rab, Rbb обнаружения согласно второму варианту осуществления. Ниже описывается устройство помощи при вождении транспортного средства согласно второму варианту осуществления. Отличающийся признак между устройством помощи при вождении транспортного средства согласно второму варианту осуществления и первому варианту осуществления представляет собой технологию, которую использует модуль 13 модификации областей обнаружения для того, чтобы модифицировать области обнаружения. Признаки, которые дублируются с первым вариантом осуществления, опускаются из этого пояснения, и ниже содержится, главным образом, пояснение отличающихся признаков.
[0048] В настоящем варианте осуществления, области обнаружения являются квадратными областями, имеющими предварительно определенную длину области в направлении FD движения и предварительно определенную ширину области в направлении, ортогональном к направлению FD движения; каждая из опорных позиций Pa, Pb задается, соответственно, сзади слева и сзади справа от основного транспортного средства Ca, и области обнаружения задаются так, что они идут сзади, при этом опорные позиции представляют собой точку начала отсчета.
[0049] В окружении, в котором модуль 12 обнаружения состояния поворачивания определяет то, что транспортное средство находится в состоянии поворачивания, модуль 13 модификации областей обнаружения задает области Rab, Rbb обнаружения в смещенной позиции, как проиллюстрировано на фиг.8, в сравнении с областями Ra, Rb обнаружения (см. фиг.5), которые используются в качестве опорных. Более конкретно, модуль 13 модификации областей обнаружения задает области Rab, Rbb обнаружения в позиции, вращаемой и перемещенной в обратном направлении относительно направления поворота основного транспортного средства Ca относительно областей Ra, Rb обнаружения (см. фиг.5), которые используются в качестве опорных. Например, как проиллюстрировано на фиг.8, когда основное транспортное средство Ca поворачивает в направлении вправо, модуль 13 модификации областей обнаружения задает области Rab, Rbb обнаружения в позиции, вращаемой и перемещенной в направлении влево относительно областей Ra, Rb обнаружения, проиллюстрированных, например, на фиг.7. Таким образом, вращение областей Rab, Rbb обнаружения в обратном направлении относительно направления поворота основного транспортного средства Ca тем самым позволяет вращать и переместить области Rab, Rbb обнаружения вдоль формы дороги, как проиллюстрировано на фиг.8. Кроме того, из областей Rab, Rbb обнаружения, модуль 13 модификации областей обнаружения модифицирует форму отдельных областей Rab, Rbb обнаружения таким образом, что степень модификации областей Rab, Rbb обнаружения, соответствующих внутренней части направления поворота, превышает степень модификации областей Rab, Rbb обнаружения, соответствующих внешней части направления поворота. Например, в примере, проиллюстрированном на фиг.8, пусть θbb представляет собой угол вращения области Rbb обнаружения относительно осевой линии основного транспортного средства Ca в направлении FD движения, и пусть θab представляет собой угол вращения области Rab обнаружения относительно осевой линии L основного транспортного средства Ca в направлении FD движения; в таком случае модуль 13 модификации областей обнаружения вращает и перемещает области Rab, Rbb обнаружения таким образом, что угол θab вращения области Rab обнаружения, соответствующей внутренней части направления поворота, превышает угол θbb вращения области Rbb обнаружения, соответствующей внешней части направления поворота.
[0050] Степень модификации каждой из областей Rba, Rbb обнаружения определяется в соответствии с радиусом поворота основного транспортного средства Ca во время состояния поворачивания основного транспортного средства Ca так, что она соответствует форме дороги. Например, модуль 13 модификации областей обнаружения задаст области Rab, Rbb обнаружения таким образом, что чем меньше радиус поворота основного транспортного средства Ca, тем больше угол (θab, θbb) вращения областей Rab, Rbb обнаружения. Таким образом, как описано выше, степень модификации различается между областями Rab, Rbb обнаружения во внутренней части направления поворота и соответствующими областями Rab, Rbb обнаружения в его внешней части, даже в идентичном состоянии поворачивания.
[0051] Например, модуль 13 модификации областей обнаружения может поддерживать карту или арифметическое выражение для отношения соответствия между радиусом поворота и областями Rab, Rbb обнаружения, модифицированными в соответствии с радиусом поворота. Модуль 13 модификации областей обнаружения модифицирует области Rab, Rbb обнаружения на основе конечного радиуса поворота, указываемого на этапе 4.
[0052] Таким образом, в настоящем варианте осуществления модуль 13 модификации областей обнаружения вращает и перемещает позицию (области Rab, Rbb обнаружения на фиг.8) области обнаружения в соответствии с радиусом поворота основного транспортного средства Ca.
[0053] Согласно этой конфигурации, перемещение или, более конкретно, вращение области обнаружения в направлении FD движения транспортного средства так, что она соответствует форме дороги, тем самым позволяет расширять перемещенные области Rab, Rbb обнаружения таким образом, что они включают в себя диапазон, соответствующий смежной полосе движения. В силу этого, можно подавлять ложное обнаружение сплошных объектов, обусловленное состоянием поворачивания основного транспортного средства Ca.
[0054] Третий вариант осуществления
Фиг.9 является пояснительной схемой, схематично иллюстрирующей модификацию формы областей Rac, Rbc обнаружения согласно третьему варианту осуществления. Ниже описывается устройство помощи при вождении транспортного средства согласно третьему варианту осуществления. Отличающийся признак между устройством помощи при вождении транспортного средства согласно третьему варианту осуществления и первым вариантом осуществления представляет собой технологию, которую использует модуль 13 модификации областей обнаружения для того, чтобы модифицировать области обнаружения. Признаки, которые дублируются с первым вариантом осуществления, опускаются из этого пояснения, и ниже содержится, главным образом, пояснение отличающихся признаков.
[0055] В третьем варианте осуществления, когда модуль 12 обнаружения состояния поворачивания определяет то, что транспортное средство находится в состоянии поворачивания, как проиллюстрировано на фиг.9, позиция областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота, перемещается и ориентируется к внутренней части направления поворота основного транспортного средства Ca. Например, в примере, проиллюстрированном на фиг.9, когда модуль 12 обнаружения состояния поворачивания определяет то, что транспортное средство находится в состоянии поворачивания, модуль 13 модификации областей обнаружения перемещает позицию области Rac обнаружения, соответствующей внутренней части направления поворота, в направлении от осевой линии L в направлении движения основного транспортного средства Ca, другими словами, модуль 13 модификации областей обнаружения перемещает позицию области Rac обнаружения в таком направлении, что расстояние D больше от осевой линии L в направлении FD движения основного транспортного средства Ca к области Rac обнаружения.
[0056] Дополнительно, в то время как основное транспортное средство Ca находится в состоянии поворачивания, модуль 13 модификации областей обнаружения задает позицию области Rac обнаружения, соответствующей внутренней части направления поворота, на основе радиуса поворота основного транспортного средства Ca. Более конкретно, модуль 13 модификации областей обнаружения задает позицию областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота, таким образом, что чем меньше радиус поворота основного транспортного средства Ca, тем больше расстояние D от осевой линии L в направлении FD движения основного транспортного средства Ca до областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота; и с другой стороны, модуль 13 модификации областей обнаружения задает позицию областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота, таким образом, что чем больше радиус поворота основного транспортного средства Ca, тем меньше расстояние D от осевой линии L в направлении FD движения основного транспортного средства Ca до областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота.
[0057] Например, модуль 13 модификации областей обнаружения может поддерживать карту или арифметическое выражение, или отношение соответствия между радиусом поворота и областями Rac, Rbc обнаружения, модифицированными в соответствии с радиусом поворота. Модуль 13 модификации областей обнаружения модифицирует области Rac, Rbc обнаружения на основе конечного радиуса поворота, указываемого на этапе 4.
[0058] Кроме того, устройство может иметь такую конфигурацию, в которой при перемещении позиции областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота в направлении от осевой линии L в направлении FD движения основного транспортного средства Ca, позиция областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота, перемещается в направлении ширины транспортного средства, и позиция областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота, перемещается в направлении движения основного транспортного средства Ca, так что области Rac, Rbc обнаружения не задаются в полосе движения, по которой движется основное транспортное средство, или так что области Rac, Rbc обнаружения не находятся в двух смежных полосах движения для следующей смежной полосы движения относительно полосы движения, по которой движется основное транспортное средство Ca.
[0059] Как описано выше, согласно настоящему варианту осуществления, в дополнение к преимуществам первого варианта осуществления, перемещение областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота основного транспортного средства Ca, тем самым позволяет предоставлять преимущество эффективного запрещения задания областей Rac, Rbc обнаружения, соответствующих внутренней части направления поворота основного транспортного средства, в полосе движения, в которой основное транспортное средство Ca движется, и тем самым позволяет подавлять ложное распознавание движущегося сзади транспортное средство, движущегося по полосе движения основного транспортного средства Ca, в качестве смежного транспортного средства, движущегося по полосе движения, смежной с основным транспортным средством Ca.
[0060] Четвертый вариант осуществления
Фиг.10 иллюстрирует устройство помощи при вождении транспортного средства согласно четвертому варианту осуществления. Отличающийся признак между устройством помощи при вождении транспортного средства согласно четвертому варианту осуществления и первым вариантом осуществления представляет собой технологию, которую использует модуль 12 обнаружения состояния поворачивания для того, чтобы обнаруживать состояние поворачивания. Признаки, которые дублируются с первым вариантом осуществления, опускаются из этого пояснения, и ниже содержится, главным образом, пояснение отличающихся признаков.
[0061] Более конкретно, модуль 12 обнаружения состояния поворачивания может считывать информацию из модуля 5 обнаружения состояния, камеры 6 и навигационной системы 7. Модуль 5 обнаружения состояния конфигурируется посредством различных датчиков для обнаружения, соответственно, рабочего режима педали акселератора, педали тормоза и индикаторов, инициированных водителем, и состояния транспортного средства, такого как скорость относительно вертикальной оси или поперечное ускорение. Дополнительно, камера 6 помещается в передней части основного транспортного средства Ca; камера 1 периодически фотографирует пейзаж в направлении FD движения основного транспортного средства Ca и тем самым хронологически выводит захваченное изображение (средство формирования изображений). Навигационная система 7 сохраняет картографическую информацию, при этом информация дороги связывается с информацией позиции, и получает позицию основного транспортного средства Ca из обнаружения посредством GPS-датчика, чтобы за счет этого отображать текущую позицию основного транспортного средства Ca в картографической информации и предоставлять навигацию на основе инструкций по маршруту до точки назначения.
[0062] В этом типе конфигурации модуль 12 обнаружения состояния поворачивания в первом варианте осуществления должен прогнозировать форму дороги с использованием изображений, снятых сзади транспортного средства посредством камеры 1. Тем не менее, модуль 12 обнаружения состояния поворачивания может использовать изображения впереди транспортного средства, снятые камерой 6, чтобы распознавать полосу движения и за счет этого прогнозировать состояние поворачивания.
[0063] Кроме того, модуль обнаружения состояния поворачивания может прогнозировать форму дороги из рабочих режимов, инициированных водителем (например, педали акселератора, педали тормоза и индикаторов и рулевого колеса и т.д.), обнаруженных посредством модуля 5 обнаружения состояния. Кроме того, модуль 12 обнаружения состояния поворачивания прогнозирует состояние поворачивания в соответствии с картографической информацией или информацией текущей позиции основного транспортного средства Ca из навигационной системы 7 и т.д.
[0064] В вышеописанном варианте осуществления модуль 12 обнаружения состояния поворачивания вычисляет радиус поворота основного транспортного средства Ca, как проиллюстрировано в формуле 1, на основе скорости основного транспортного средства Ca, угла поворота при рулении основного транспортного средства Ca и различных элементов, связанных с транспортным средством. Тем не менее, модуль 12 обнаружения состояния поворачивания может вычислять радиус поворота транспортного средства на основе разности в скорости вращения колес для колес, предоставленных для основного транспортного средства Ca, и различных элементов, связанных с транспортным средством, или может вычислять радиус поворота основного транспортного средства Ca на основе захваченных изображений из камеры 1 или камеры 6. В завершение, модуль 12 обнаружения состояния поворачивания может вычислять радиус поворота основного транспортного средства Ca на основе скорости относительно вертикальной оси, используемой в качестве состояния транспортного средства, полученной из модуля 5 обнаружения состояния, или поперечного ускорения и скорости транспортного средства, либо модуль 12 обнаружения состояния поворачивания может вычислять радиус поворота основного транспортного средства Ca на основе картографической информации, полученной из навигационной системы 7, и позиции основного транспортного средства Ca.
[0065] Согласно этому варианту осуществления, различные технологии могут использоваться для прогнозирования состояния поворачивания и для вычисления радиуса поворота основного транспортного средства Ca. В силу этого, может точно прогнозироваться состояние поворачивания, и может точно обнаруживаться радиус поворота основного транспортного средства Ca. Как результат, может надлежащим образом модифицироваться форма области обнаружения, и за счет этого можно эффективно подавлять ложное обнаружение сплошных объектов.
[0066] Пятый вариант осуществления
Фиг.11 и 12 являются пояснительными схемами, схематично иллюстрирующими модификацию формы областей обнаружения согласно пятому варианту осуществления. Ниже описывается устройство помощи при вождении транспортного средства согласно пятому варианту осуществления. Отличающийся признак между устройством помощи при вождении транспортного средства согласно пятому варианту осуществления и первому варианту осуществления представляет собой технологию, которую использует модуль 13 модификации областей обнаружения для того, чтобы модифицировать область обнаружения. Признаки, которые дублируются с первым вариантом осуществления, опускаются из этого пояснения, и ниже содержится, главным образом, пояснение отличающихся признаков. Дополнительно, как проиллюстрировано на фиг.11 и фиг.12, пятый вариант осуществления описывает пример, в котором основное транспортное средство Ca движется по круговой развязке (кольцевой транспортной развязке или участку дороги с круговым движением).
[0067] Например, как проиллюстрировано на фиг.11, в ситуации, когда основное транспортное средство Ca въезжает на круговую развязку и поворачивает на круговой развязке (например, в ситуации, когда основное транспортное средство Ca находится в позиции P1, проиллюстрированной на фиг.11), аналогично первому варианту осуществления, модуль 13 модификации областей обнаружения модифицирует длину области для области обнаружения (областей Raa, Rba обнаружения) таким образом, что длина области меньше в направлении FD движения, чем для областей Ra, Rb обнаружения, которые становятся опорными (см. фиг.5). Дополнительно, в этом случае, аналогично первому варианту осуществления, модуль 13 модификации областей обнаружения задает области обнаружения таким образом, что степень модификации области Raa обнаружения, соответствующей внутренней части поворота, является больше, чем степень модификации области Rba обнаружения, соответствующей внешней части поворота.
[0068] Дополнительно, как проиллюстрировано на фиг.11, в ситуации, когда основное транспортное средство Ca поворачивает на круговой развязке (например, в ситуации, когда основное транспортное средство Ca находится в позиции P1, проиллюстрированной на фиг.11), хотя руль поворачивается в направлении вправо после этого, в ситуации, когда основное транспортное средство Ca начинает выезжать с круговой развязки (например, в ситуации, когда основное транспортное средство Ca перемещается из позиции P1 в позицию P2, проиллюстрированную на фиг.11), руль поворачивается влево. В силу этого, основное транспортное средство Ca находится в состоянии поворачивания в направлении влево, и модуль 13 модификации областей обнаружения изменяет форму области Rba обнаружения таким образом, что длина обнаружения меньше в направлении FD движения области Rba обнаружения на внутренней части поворота.
[0069] Кроме того, в ситуации, когда основное транспортное средство Ca выезжает с круговой развязки (например, в ситуации, когда основное транспортное средство Ca перемещается из позиции P1 в позицию P2, проиллюстрированную на фиг.11), поворот рулевого колеса из направления вправо в направление влево в силу этого инструктирует модулю 12 обнаружения состояния поворачивания обнаруживать операцию возврата рулевого колеса и обнаруживать величину возврата рулевого колеса вследствие операции возврата рулевого колеса. Таким образом, когда обнаруживается величина возврата рулевого колеса, модуль 13 модификации областей обнаружения инициирует процесс для того, чтобы возвращать области Raa, Rba обнаружения в начальное состояние (Ra, Rb проиллюстрированы на фиг.5).
[0070] Например, в примере, проиллюстрированном на фиг.11, когда основное транспортное средство Ca движется из позиции P1 в позицию P2, руль поворачивается из направления вправо в направление влево, и величина возврата в направление влево обнаруживается для рулевого колеса. В силу этого, модуль 13 модификации областей обнаружения инициирует процесс для того, чтобы возвращаться в начальное состояние Ra для области Raa обнаружения, соответствующей внутренней части направления поворота при повороте на круговой развязке. Другими словами, когда величина возврата в направление влево обнаруживается для рулевого колеса, модуль 13 модификации областей обнаружения постепенно расширяет область Raa обнаружения в направлении FD движения таким образом, что длина области для области Raa обнаружения, заданной сзади справа от основного транспортного средства Ca, становится идентичной длине области для области Ra обнаружения в начальном состоянии.
[0071] Кроме того, в ситуации, когда основное транспортное средство Ca движется из позиции P2, проиллюстрированной на фиг.11, в направлении выезда круговой развязки вплоть до позиции P3, проиллюстрированной на фиг.12, величина возврата в направлении вправо обнаруживается для рулевого колеса, что также инициирует процесс для возвращения области Rba обнаружения, заданной сзади слева от основного транспортного средства, в начальное состояние Rb. Дополнительно, в ситуациях, проиллюстрированных на фиг.11 и фиг.12, процесс для возвращения областей Raa, Rba обнаружения в начальные состояния Ra, Rb инициируется для области Raa обнаружения, заданной сзади справа от основного транспортного средства Ca, до инициирования для области Rba обнаружения, заданной сзади слева от основного транспортного средства Ca. Следовательно, в ситуации, проиллюстрированной на фиг.12, длина области для области Raa обнаружения, заданной сзади справа от основного транспортного средства Ca, задается так, что она превышает область Rba обнаружения, заданную сзади слева от основного транспортного средства Ca.
[0072] Дополнительно, в настоящем варианте осуществления, модуль 13 модификации областей обнаружения в завершение определяет скорость V возврата для возвращения области Rab, Rba обнаружения в начальные состояния Ra, Rb на основе величины возврата рулевого колеса. Здесь, фиг.13 иллюстрирует один пример взаимосвязи между скоростью V возврата для возвращения областей Raa, Rba обнаружения в начальные состояния Ra, Rb и величиной Q возврата рулевого колеса.
[0073] Как проиллюстрировано на фиг.13, чем больше абсолютное значение величины Q возврата рулевого колеса, тем ниже скорость V возврата, заданная посредством модуля 13 модификации областей обнаружения для возвращения сокращенной длины области для областей Raa, Rba обнаружения в начальные состояния Ra, Rb; и чем меньше абсолютное значение величины Q возврата рулевого колеса, тем выше скорость V возврата, заданная посредством модуля 13 модификации областей обнаружения для возвращения сокращенной длины области для областей Raa, Rba обнаружения в начальные состояния Ra, Rb. Более конкретно, как проиллюстрировано на фиг.13, модуль 13 модификации областей обнаружения возвращает области Raa, Rba обнаружения в начальные состояния Ra, Rb на предварительно определенной скорости V1, когда абсолютное значение величины Q возврата рулевого колеса меньше предварительно определенного значения S1; помимо этого, модуль 13 модификации областей обнаружения возвращает области Raa, Rba обнаружения в начальные состояния Ra, Rb на предварительно определенной скорости V2, которая превышает предварительно определенную скорость V1, когда абсолютное значение величины Q возврата рулевого колеса не меньше предварительно определенного значения S2, которое превышает предварительно определенное значение S1. Дополнительно, когда абсолютное значение величины Q возврата рулевого колеса превышает или равно предварительно определенному значению S1 и меньше предварительно определенного значения S2, области Raa, Rba обнаружения возвращаются в начальные состояния Ra, Rb со скоростью, на которой чем больше абсолютное значение величины Q возврата рулевого колеса, тем ниже скорость возврата в диапазоне от предварительно определенной скорости V1 до предварительно определенной скорости V2. В силу этого, в пятом варианте осуществления, чем больше абсолютное значение величины Q возврата рулевого колеса, тем больше время, требуемое для возвращения сокращенной длины области для областей Raa, Rba обнаружения в начальные состояния Ra, Rb, и чем меньше абсолютное значение величины Q возврата рулевого колеса, тем меньше время, требуемое для возвращения сокращенной длины области для областей Raa, Rba обнаружения в начальные состояния Ra, Rb.
[0074] Кроме того, способы обнаружения, используемые для обнаружения величины возврата рулевого колеса, не ограничены конкретным образом, и в настоящем варианте осуществления модуль обнаружения состояния поворачивания обнаруживает величину Q возврата рулевого колеса на основе варьирования угла поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении. Здесь, фиг.14 является схемой для описания способа, используемого для обнаружения величины возврата рулевого колеса. Нижеприведенное описание способа обнаружения для обнаружения величины возврата рулевого колеса приводится со ссылкой на фиг.14.
[0075] А именно, во-первых, модуль 12 обнаружения состояния поворачивания обрабатывает угол поворота при рулении, обнаруженный посредством датчика 3 угла поворота при рулении, посредством использования фильтров нижних частот, имеющих различные характеристики (фильтра A нижних частот и фильтра B нижних частот). Здесь, как проиллюстрировано на фиг.14, фильтр A нижних частот имеет большую (высокую) способность к регулировке (чувствительность) относительно угла поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении, и фильтр B нижних частот имеет небольшую (низкую) способность к регулировке (чувствительность) относительно угла поворота при рулении, обнаруженного посредством датчика 3 угла поворота при рулении.
[0076] С учетом характеристик этих фильтров нижних частот, как проиллюстрировано на фиг.14, модуль 12 обнаружения состояния поворачивания обнаруживает величину Q возврата рулевого колеса посредством рассмотрения разности между углом поворота при рулении, фильтрованным с помощью фильтра A нижних частот, и углом поворота при рулении, фильтрованным с помощью фильтра B нижних частот, во время после того, когда прошло предварительно определенное время (например, время t2, проиллюстрированное на фиг.14) со времени (времени t1, проиллюстрированного на фиг.14), когда выполнен возврат рулевого колеса.
[0077] Модуль 13 модификации областей обнаружения определяет то, является величина возврата рулевого колеса, полученная из модуля 12 обнаружения состояния поворачивания, положительным значением или отрицательным значением, чтобы определять направление возврата рулевого колеса. Например, если модуль спроектирован таким образом, что когда операция возврата рулевого колеса выполняется в направлении влево, величина возврата рулевого колеса обнаруживается в качестве положительного значения, а когда операция возврата рулевого колеса выполняется в направлении вправо, величина возврата рулевого колеса обнаруживается в качестве отрицательного значения, то модуль 13 модификации областей обнаружения может определять то, что руль перемещается в направлении влево, когда обнаруженная величина возврата рулевого колеса является положительным значением, и тем самым возвращать область Raa обнаружения сзади справа в начальное состояние Ra.
[0078] Как описано выше, в настоящем варианте осуществления, как проиллюстрировано на фиг.11 и фиг.12, в ситуациях, когда основное транспортное средство Ca выезжает с круговой развязки и т.п., когда выполняется возврат рулевого колеса, области Raa, Rba обнаружения с сокращенной длиной области постепенно возвращаются в начальные состояния Ra, Rb на основе величины возврата рулевого колеса. В силу этого, в ситуациях, когда основное транспортное средство Ca выезжает с круговой развязки и т.п., можно не допускать обнаружения движущегося сзади транспортного средства, движущегося по идентичной полосе движения что и основное транспортное средство Ca, в областях Raa, Rab обнаружения, за счет этого эффективно не допуская ложного распознавания такого типа движущегося сзади транспортного средства в качестве смежного транспортного средства, движущегося по полосе движения, смежной с основным транспортным средством Ca.
[0079] Дополнительно, в соответствии с настоящим вариантом осуществления, можно эффективно разрешать следующие проблемы. Другими словами, имеется проблема в том, что если радиус круговой развязки является небольшим, и величина Q возврата рулевого колеса является большой, области Raa, Rba обнаружения зачастую задаются в полосе движения, по которой движется основное транспортное средство Ca, и в силу этого существует проблема ложного обнаружения движущегося сзади транспортного средства, движущегося по полосе движения, по которой движется основное транспортное средство Ca. Дополнительно, если величина Q возврата рулевого колеса является большой, существует тенденция, согласно которой водитель основного транспортного средства Ca выезжает с круговой развязки с относительно более низкой скоростью в целях безопасности, и в зависимости от скорости возврата для возвращения областей Raa, Rab обнаружения в начальные состояния Ra, Rb, предусмотрен случай, в котором области Raa, Rab обнаружения с сокращенной длиной области возвращаются в начальные состояния Ra, Rb до того, как основное транспортное средство Ca выезжает с круговой развязки. Что касается такой проблемы, как проиллюстрировано на фиг.13, в настоящем варианте осуществления, чем больше абсолютное значение величины Q возврата рулевого колеса, тем ниже скорость V возврата для возвращения областей Raa, Rba обнаружения в начальные состояния Ra, Rb, и за счет этого можно возвращать области Raa, Rba обнаружения в начальные состояния Ra, Rb в надлежащее время, которое соответствует форме круговой развязки; дополнительно, можно эффективно предотвращать ложное обнаружение движущегося сзади транспортного средства, движущегося по полосе движения, по которой движется основное транспортное средство Ca, в качестве смежного транспортного средства. Наоборот, чем меньше абсолютное значение величины Q возврата рулевого колеса, тем выше скорость V возврата для возвращения областей Raa, Rba обнаружения в начальные состояния Ra, Rb, и тем самым после того, как основное транспортное средство Ca выезжает с круговой развязки, с учетом того, что можно возвращать области Raa, Rba обнаружения в начальные состояния Ra, Rb за короткий срок, можно обнаруживать смежное транспортное средство в надлежащее время.
[0080] Дополнительно, тогда как вышеописанный пятый вариант осуществления предоставляет пример конфигурации, в которой область Raa, Raa обнаружения с сокращенной длиной области постепенно возвращается в начальные состояния Ra, Rb на основе величины возврата рулевого колеса, когда основное транспортное средство Ca выезжает с круговой развязки, настоящее изобретение не ограничено этой конфигурацией; например, в вышеописанном втором варианте осуществления, конфигурация может быть такой, что когда области Raa, Rba обнаружения вращаются и перемещаются в обратном направлении относительно направления поворота основного транспортного средства Ca, вращаемые и перемещенные области Raa, Rba обнаружения могут постепенно возвращаться в начальные состояния Ra, Rb на основе величины возврата рулевого колеса. Кроме того, конфигурация для этого случая также может быть такой, что чем больше абсолютное значение величины Q возврата рулевого колеса, тем ниже скорость V возврата для возвращения вращаемых и перемещенных областей Raa, Rba обнаружения в начальные состояния Ra, Rb; и чем меньше абсолютное значение величины Q возврата рулевого колеса, тем выше скорость V возврата для возвращения вращаемой и перемещенной длины области для областей Raa, Rba обнаружения в начальные состояния Ra, Rb.
[0081] В завершение, в то время как настоящий вариант осуществления предоставляет пример конфигурации, в которой процесс возврата инициируется в момент, когда обнаруживается величина возврата рулевого колеса для возвращения областей Raa, Rba обнаружения, без ограничения этой конфигурацией, например, конфигурация может быть такой, что в ситуативных примерах, проиллюстрированных на фиг.12, процесс возврата может быть инициирован в момент, когда обнаруживается величина возврата рулевого колеса, и основное транспортное средство Ca изменяется с состояния поворачивания на состояние неповорачивания для возвращения областей Raa, Rba обнаружения в начальные состояния Ra, Rb.
[0082] На этом завершается пояснение устройства помощи при вождении согласно вариантам осуществления настоящего изобретения; тем не менее, настоящее изобретение не ограничено вышеописанными вариантами осуществления и может быть модифицировано в той мере, в какой модификации находятся в пределах объема изобретения.
[0083] Например, вышеописанный вариант осуществления представляет пример конфигурации, в которой позиция области обнаружения относительно основного транспортного средства Ca либо форма или площадь области обнаружения изменяется, когда основное транспортное средство Ca находится в состоянии поворачивания, с тем чтобы исключать области обнаружения, которые могут формировать ложное распознавание сплошного объекта; тем не менее, без ограничения этой конфигурацией, также могут предоставляться следующие конфигурации. Например, может быть конфигурация, в которой при создании разностного изображения, если основное транспортное средство Ca находится в состоянии поворачивания, подавление или запрещение выходного значения для разности в области, в которой может быть сформировано ложное распознавание сплошного объекта, тем самым позволяет подавлять ложное распознавание сплошного объекта в области, которая может формировать ложное распознавание сплошного объекта. Дополнительно, может быть конфигурация, в которой когда разностное изображение преобразуется в двоичную форму с предварительно определенным пороговым значением, посредством чего область, не меньшая порогового значения, указывается в качестве сплошного объекта, если транспортное средство находится в состоянии поворачивания, увеличение порогового значения, используемого при преобразовании в двоичную форму области, в которой может быть сформировано ложное обнаружение объекта, тем самым позволяет подавлять ложное распознавание сплошного объекта в области, которая может формировать ложное распознавание сплошного объекта.
[0084] Кроме того, как проиллюстрировано на фиг.15(A), вышеописанный вариант осуществления представляет пример конфигурации, в которой изменение формы области обнаружения таким образом, чтобы сокращать длину области в направлении движения, за счет этого изменяет площадь области обнаружения; тем не менее, без ограничения этой конфигурацией, например, как проиллюстрировано на фиг.15(B), может быть конфигурация, которая исключает из областей, используемых при формировании разностного изображения, область из числа областей обнаружения, которые могут формировать ложное распознавание сплошного объекта, чтобы за счет этого изменять площадь области обнаружения. Другими словами, может быть конфигурация, которая задает дефектную область в области обнаружения, как проиллюстрировано на фиг.15(B), и формирует разностное изображение только в целевой области, которая исключает дефектную область из области обнаружения. Дополнительно, таким же образом, исключение из областей, используемых при формировании разностного изображения, области из числа областей обнаружения, которые могут формировать ложное распознавание объекта, тем самым изменяет площадь областей обнаружения. В завершение, фиг.15 является схемой для пояснения другого примера для изменения формы области обнаружения.
[0085] Кроме того, вышеописанный вариант осуществления представляет пример конфигурации, в котором площадь области обнаружения изменяется, чтобы исключать область обнаружения, которая может формировать ложное обнаружение сплошного объекта; тем не менее, без ограничения этой конфигурацией, например, как проиллюстрировано на фиг.15(C), может быть конфигурация, в которой без изменения площади области обнаружения, изменяется только форма области обнаружения, чтобы исключать область обнаружения, которая может формировать ложное обнаружение сплошного объекта. Например, в примере, проиллюстрированном на фиг.15(C), область Ra обнаружения сужается на внутренней части направления поворота, в то время как передний участок области Ra обнаружения задается так, чтобы выступать на эту величину, так что полоса движения, по которой движется основное транспортное средство Ca, не включается в область Ra обнаружения, когда основное транспортное средство Ca поворачивает, и за счет этого форма области обнаружения может быть изменена без изменения площади области обнаружения.
[0086] В завершение, вышеописанный вариант осуществления представляет пример конфигурации, в которой позиция областей A1, A2 обнаружения изменяется, чтобы исключать область обнаружения, которая может формировать ложное распознавание сплошного объекта, которое выполняется посредством перемещения позиции областей A1, A2 обнаружения в направлении ширины транспортного средства или вращения и перемещения областей A1, A2 обнаружения; тем не менее, без ограничения этой конфигурацией, например, может быть конфигурация, которая перемещает позицию областей A1, A2 обнаружения в направлении FD движения основного транспортного средства Ca, чтобы исключать область обнаружения, которая может формировать ложное распознавание сплошного объекта.
[0087] Номера ссылок
1 - камера
2 - датчик скорости вращения колес
3 - датчик угла поворота при рулении
5 - модуль обнаружения состояния
6 - камера
7 - навигационная система
10 - контроллер
11 - модуль преобразования точки наблюдения
12 - модуль обнаружения состояния поворачивания
13 - модуль модификации областей обнаружения
14 - модуль обнаружения сплошных объектов
Реферат
Группа изобретений относится к устройству помощи при вождении. Устройство помощи при вождении содержит средство обнаружения состояния поворачивания, средство формирования изображений, средство обнаружения сплошных объектов и средство модификации областей обнаружения. Способ помощи при вождении содержит этапы, на которых формируют изображения предварительно определенного диапазона, включающего в себя области определения, заданные сзади слева и сзади справа от основного транспортного средства, и обнаруживают сплошной объект в областях обнаружения, при этом обнаруживают состояние поворачивания основного транспортного средства, формируют изображение предварительно определенного диапазона, обнаруживают следом движущееся транспортное средство в областях обнаружения на виде с высоты птичьего полета и модифицируют область обнаружения для уменьшения размера областей обнаружения на виде с высоты птичьего полета на стороне поворота. Достигается повышение точности обнаружения в состоянии поворачивания транспортного средства при обнаружении сплошных объектов. 3 н. и 10 з.п. ф-лы, 15 ил.
Формула
средство обнаружения состояния поворачивания для обнаружения состояния поворачивания основного транспортного средства на основе угла поворота при рулении основного транспортного средства,
средство формирования изображений, установленное на основном транспортном средстве для съемки изображения предварительно определенного диапазона, который включает в себя области определения, соответствующие прилегающим полосам в состоянии неповорачивания, заданные сзади слева и сзади справа от основного транспортного средства, и которое выводит захваченное изображение,
средство обнаружения сплошных объектов для обнаружения следом движущегося транспортного средства в областях обнаружения на виде с высоты птичьего полета, полученного путем преобразования поля зрения захваченного изображения,
средство модификации областей обнаружения для уменьшения размера областей обнаружения на виде с высоты птичьего полета на стороне поворота, по сравнению с состоянием неповорачивания в пределах, которые включают область, которая проксимальна (ближайшая) к основному транспортному средству, когда средство обнаружения состояния поворачивания обнаруживает то, что основное транспортное средство находится в состоянии поворачивания.
средство преобразования точки наблюдения для преобразования множества захваченных изображений, снятых посредством средства формирования изображений, в изображения вида с высоты птичьего полета с использованием преобразования точки наблюдения,
средство обнаружения сплошных объектов обнаруживает сплошной объект в области обнаружения среди разностных изображений, которые соответствуют разности времен между множеством изображений вида с высоты птичьего полета на основе разностного изображения в области обнаружения.
средство обнаружения состояния поворачивания для обнаружения состояния поворачивания основного транспортного средства, средство формирования изображений, установленное на основном транспортном средстве для съемки изображения предварительно определенного диапазона, который включает в себя области определения, заданные сзади слева и сзади справа от основного транспортного средства,
средство обнаружения сплошных объектов для обнаружения сплошного объекта в областях обнаружения на основе захваченного изображения,
средство модификации областей обнаружения для вращения и перемещения областей обнаружения относительно основного транспортного средства в обратном направлении относительно направления поворота основного транспортного средства на основе состояния поворачивания основного транспортного средства, когда средство обнаружения состояния поворачивания обнаруживает то, что основное транспортное средство находится в состоянии поворачивания, чтобы предотвращать ложное распознавание сплошного объекта, и
средство модификации областей обнаружения вращает и перемещает область обнаружения таким образом, что угол вращения для области обнаружения, соответствующей внутренней части поворота, превышает угол вращения для области обнаружения, соответствующей внешней части поворота.
средство прогнозирования состояния поворачивания для прогнозирования состояния поворачивания основного транспортного средства в качестве прогнозного состояния поворачивания; и
средство модификации областей обнаружения обнаруживает вероятность прогнозного состояния поворачивания на основе состояния поворачивания основного транспортного средства, обнаруженного посредством средства обнаружения состояния поворачивания, и прогнозного состояния поворачивания, прогнозированного посредством средства прогнозирования состояния поворачивания, и изменяет позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения на основе прогнозного состояния поворачивания, когда вероятность прогнозного состояния поворачивания не меньше предварительно определенного значения, и изменяет позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения на основе состояния поворачивания основного транспортного средства, обнаруженного посредством средства обнаружения состояния поворачивания, когда вероятность прогнозного состояния поворачивания меньше предварительно определенного значения.
средства прогнозирования для прогнозирования состояния поворачивания основного транспортного средства на основе рабочего состояния водителя, и
средства прогнозирования для вычисления состояния поворачивания основного транспортного средства из числа средства прогнозирования, которое прогнозирует состояние поворачивания на основе средства формирования изображений, захваченного изображения, выводимого из средства формирования изображений, размещенного в передней части транспортного средства, и средства прогнозирования для вычисления состояния поворачивания основного транспортного средства на основе картографической информации, которая связывает информацию дороги с информацией позиции, и позиции основного транспортного средства.
средство модификации областей обнаружения изменяет позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения от начального состояния для области обнаружения в соответствии с таким определением, что основное транспортное средство находится в состоянии поворачивания, и после этого возвращает позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения в начальное состояние, когда средство обнаружения величины возврата обнаруживает величину возврата рулевого колеса, и
средство модификации областей обнаружения задает более низкую скорость для возвращения позиции области обнаружения относительно основного транспортного средства или площади области обнаружения в начальное состояние, когда средство обнаружения величины возврата обнаруживает величину возврата рулевого колеса, по сравнению со скоростью для изменения позиции области обнаружения относительно основного транспортного средства или площади области обнаружения от начального состояния для области обнаружения в соответствии с таким определением, что основное транспортное средство находится в состоянии поворачивания.
изменяет позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения от начального состояния для области обнаружения в соответствии с таким определением, что основное транспортное средство находится в состоянии поворачивания, и после этого определяет скорость на основе величины возврата рулевого колеса для возвращения позиции области обнаружения относительно основного транспортного средства или площади области обнаружения в начальное состояние, когда средство обнаружения величины возврата обнаруживает величину возврата рулевого колеса, и возвращает позицию области обнаружения относительно основного транспортного средства или площадь области обнаружения в начальное состояние на основе определенной скорости.
средство модификации областей обнаружения,
причем, когда средство обнаружения намерения смены полосы обнаруживает намерение сменить полосу движения, и основное транспортное средство переходит из состояния поворачивания в состояние неповорачивания, и область обнаружения возвращается в начальное состояние:
задает более низкую скорость для возвращения позиции области обнаружения относительно основного транспортного средства или площади области обнаружения в начальное состояние, когда средство обнаружения величины возврата обнаруживает величину возврата рулевого колеса, по сравнению со скоростью для изменения позиции области обнаружения относительно основного транспортного средства или площади области обнаружения от начального состояния для области обнаружения в соответствии с таким определением, что основное транспортное средство находится в состоянии поворачивания.
формируют изображения предварительно определенного диапазона, включающего в себя области определения, заданные сзади слева и сзади справа от основного транспортного средства, и обнаруживают сплошной объект в областях обнаружения, при этом:
обнаруживают состояние поворачивания основного транспортного средства, на основе угла поворота при рулении основного транспортного средства,
формируют изображение предварительно определенного диапазона, который включает в себя области определения, соответствующие прилегающим полосам в состоянии неповорачивания, заданные сзади слева и сзади справа от основного транспортного средства, и которое выводит захваченное изображение,
обнаруживают следом движущееся транспортное средство в областях обнаружения на виде с высоты птичьего полета, полученное путем преобразования поля зрения захваченного изображения,
модифицируют область обнаружения для уменьшения размера областей обнаружения на виде с высоты птичьего полета на стороне поворота, по сравнению с состоянием неповорачивания в пределах, которые включают область, которая проксимальна (ближайшая) к основному транспортному средству, когда средство обнаружения состояния поворачивания обнаруживает то, что основное транспортное средство находится в состоянии поворачивания.
Комментарии