Транспортное средство и способ управления трансмиссией транспортного средства - RU2698607C1
Код документа: RU2698607C1
Чертежи

















Описание
Область техники
[0001] Изобретение относится к транспортному средству, которое включает в себя, по меньшей мере, два зацепляющих механизма и может задавать два или более режимов движения посредством избирательного зацепления зацепляющих механизмов, а также относится к способу управления транспортным средством.
Уровень техники
[0002] Механизм деления мощности, описанный в публикации не прошедшей экспертизу заявки на патент Японии № 2017-007437 (JP 2017-007437 А), преимущественно состоит из первого планетарного зубчатого механизма односателлитного типа, имеющего водило, с которым соединяется двигатель, и солнечную шестерню, с которой соединяется первый электромотор, второго планетарного зубчатого механизма односателлитного типа, имеющего водило, с которым соединяется коронная шестерня первого планетарного зубчатого механизма, и коронную шестерню, с которой соединяются ведущие колеса, первого механизма муфты, который избирательно соединяет водило первого планетарного зубчатого механизма с солнечной шестерней второго планетарного зубчатого механизма, и второго механизма муфты, который избирательно соединяет водило и коронную шестерню второго планетарного зубчатого механизма. Когда второй механизм муфты зацепляется, механизм деления мощности переводится в режим пониженной передачи, в котором пропорция мощности, передаваемой в сторону выходного вала, является относительно большой. Когда первый механизм муфты зацепляется, механизм деления мощности переводится в режим повышенной передачи, в котором вышеуказанная пропорция меньше пропорции для режима пониженной передачи. Когда первый механизм муфты и второй механизм муфты зацепляются, механизм деления мощности переводится в режим прямого соединения, в котором крутящий момент двигателя передается как есть на ведущие колеса.
Сущность изобретения
[0003] Механизм деления мощности, описанный в JP 2017-007437 А, может задавать три режима движения, т.е. режим пониженной передачи, режим повышенной передачи и режим прямого соединения, посредством переключения первого механизма муфты между зацепленным состоянием и расцепленным состоянием и переключения второго механизма муфты между зацепленным состоянием и расцепленным состоянием. Когда режим пониженной передачи задается, водило первого планетарного зубчатого механизма и солнечная шестерня второго планетарного зубчатого механизма вращаются относительно друг друга; в силу этого переключение из режима пониженной передачи на режим повышенной передачи нормально выполняется через режим прямого соединения. Аналогично, когда режим повышенной передачи задается, водило и коронная шестерня второго планетарного зубчатого механизма вращаются относительно друг друга; в силу этого переключение из режима повышенной передачи на режим пониженной передачи нормально выполняется через режим прямого соединения.
[0004] Тем не менее, если режим прямого соединения задается, когда транспортное средство движется на чрезвычайно низкой скорости транспортного средства, частота вращения двигателя может уменьшаться таким образом, что она ниже частоты вращения, при которой двигатель может вращаться сам по себе, и двигатель может быть остановлен. Кроме того, когда режим прямого соединения задается, все вращающиеся элементы механизма деления мощности вращаются на идентичной частоте вращения, и в силу этого, операция нажатия педали акселератора водителем и частота вращения двигателя могут не соответствовать друг другу. Более конкретно, когда частота вращения двигателя должна увеличиваться таким образом, чтобы задавать режим прямого соединения в процессе переключения из режима пониженной передачи на режим повышенной передачи посредством уменьшения рабочей величины нажатия педали акселератора, частота вращения двигателя увеличивается, против такого предположения водителя, что частота вращения двигателя должна уменьшаться вследствие уменьшения рабочей величины нажатия педали акселератора водителем. Как результат, водитель может испытывать странное или некомфортное ощущение. А именно, по-прежнему имеется некоторый запас для технического улучшения, для надлежащего выполнения переключения из режима пониженной передачи на режим повышенной передачи и переключения из режима повышенной передачи на режим пониженной передачи.
[0005] Один аспект изобретения заключается в том, чтобы устанавливать режим пониженной передачи и режим повышенной передачи без прохождения через режим прямого соединения.
[0006] Первый аспект изобретения относится к транспортному средству. Транспортное средство включает в себя двигатель, ведущие колеса, первую вращающуюся машину, трансмиссионный механизм и электронный модуль управления. Трансмиссионный механизм включает в себя множество вращающихся элементов, первый зацепляющий механизм и второй зацепляющий механизм. Множество вращающихся элементов включают в себя первый вращающийся элемент, соединенный с двигателем, второй вращающийся элемент, соединенный с первой вращающейся машиной, и третий вращающийся элемент, соединенный с ведущими колесами таким образом, чтобы третий вращающийся элемент может передавать крутящий момент на ведущие колеса. Первый зацепляющий механизм выполнен с возможностью избирательно соединять два вращающихся элемента из множества вращающихся элементов, и второй зацепляющий механизм выполнен с возможностью избирательно соединять два вращающихся элемента из множества вращающихся элементов. Электронный модуль управления выполнен с возможностью управлять двигателем, первой вращающейся машиной, первым зацепляющим механизмом и вторым зацепляющим механизмом. Электронный модуль управления выполнен с возможностью задавать режим пониженной передачи посредством управления первым зацепляющим механизмом в зацепленное состояние и управления вторым зацепляющим механизмом в расцепленное состояние. Режим пониженной передачи представляет собой режим, в котором пропорция крутящего момента равна первому заданному значению. Пропорция крутящего момента представляет собой пропорцию крутящего момента, передаваемого в третий вращающийся элемент, относительно крутящего момента, выводимого из двигателя. Электронный модуль управления выполнен с возможностью задавать режим повышенной передачи посредством управления вторым зацепляющим механизмом в зацепленное состояние и управления первым зацепляющим механизмом в расцепленное состояние. Режим повышенной передачи представляет собой режим, в котором пропорция крутящего момента равна второму заданному значению, которое меньше первого заданного значения. Электронный модуль управления выполнен с возможностью задавать режим прямого соединения посредством управления первым зацепляющим механизмом и вторым зацепляющим механизмом в зацепленное состояние. Режим прямого соединения представляет собой режим, в котором работа в дифференциальном режиме вращающихся элементов ограничивается. Электронный модуль управления выполнен с возможностью осуществлять первое управление переключением, когда имеется запрос на переключение из режима пониженной передачи на режим повышенной передачи. Первое управление переключением включает в себя i) расцепление первого зацепляющего механизма, ii) управление двигателем до первой заданной частоты вращения, iii) управление частотой вращения первой вращающейся машины таким образом, что разность между частотой вращения входного вала и частотой вращения выходного вала второго зацепляющего механизма становится равной или меньшей первого допустимого значения, и iv) переключение второго зацепляющего механизма в зацепленное состояние, когда разность между частотой вращения входного вала и частотой вращения выходного вала второго зацепляющего механизма равна или меньше первого допустимого значения. Электронный модуль управления выполнен с возможностью осуществлять второе управление переключением, когда имеется запрос на переключение из режима повышенной передачи на режим пониженной передачи. Второе управление переключением включает в себя v) расцепление второго зацепляющего механизма, vi) управление двигателем до второй заданной частоты вращения, vii) управление частотой вращения первой вращающейся машины таким образом, что разность между частотой вращения входного вала и частотой вращения выходного вала первого зацепляющего механизма становится равной или меньшей второго допустимого значения, и viii) переключение первого зацепляющего механизма в зацепленное состояние, когда разность между частотой вращения входного вала и частотой вращения выходного вала первого зацепляющего механизма равна или меньше второго допустимого значения.
[0007] При вышеуказанной конфигурации, когда режим движения переключается между режимом пониженной передачи и режимом повышенной передачи, один из первого зацепляющего механизма и второго зацепляющего механизма, который в данный момент зацепляется, расцепляется. Соответственно, двигатель, первая вращающаяся машина и ведущие колеса могут отдельно вращаться. А именно, частота вращения двигателя может управляться по мере необходимости. Следовательно, частота вращения двигателя с меньшей вероятностью или с очень небольшой вероятностью должна чрезмерно уменьшаться и может изменяться в соответствии с требуемой движущей силой. Как результат, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение во время переключения режима движения. Кроме того, частота вращения первой вращающейся машины управляется во время переключения режима движения таким образом, чтобы уменьшать разность между частотой вращения входного вала и частотой вращения выходного вала зацепляющего механизма, который должен зацепляться. Поскольку зацепляющий механизм может зацепляться в этом состоянии, толчок, который должен возникать при зацеплении зацепляющего механизма, может уменьшаться или исключаться.
[0008] В транспортном средстве, как описано выше, электронный модуль управления может быть выполнен с возможностью осуществлять переключение между режимом пониженной передачи и режимом повышенной передачи без прохождения через режим прямого соединения, когда скорость транспортного средства равна или меньше первой заданной скорости транспортного средства.
[0009] В транспортном средстве, как описано выше, первая заданная скорость транспортного средства может включать в себя скорость транспортного средства, при которой двигатель не может вращаться сам по себе, когда режим прямого соединения задается.
[0010] В транспортном средстве, как описано выше, первая заданная скорость транспортного средства может включать в себя скорость транспортного средства, при которой частота вращения двигателя становится равной или превышающей собственную частоту трансмиссионного механизма, когда режим прямого соединения задается.
[0011] В транспортном средстве, как описано выше, первая заданная частота вращения и вторая заданная частота вращения двигателя могут включать в себя частоту вращения на холостом ходу.
[0012] В транспортном средстве, как описано выше, электронный модуль управления может быть выполнен с возможностью осуществлять переключение между режимом пониженной передачи и режимом повышенной передачи без прохождения через режим прямого соединения, когда скорость транспортного средства равна или выше второй заданной скорости транспортного средства.
[0013] В транспортном средстве, как описано выше, вторая заданная скорость транспортного средства может включать в себя скорость транспортного средства, при которой частота вращения двигателя должна варьироваться согласно требуемой движущей силе, требуемой для транспортного средства водителем, когда водитель изменяет требуемую движущую силу.
[0014] В транспортном средстве, как описано выше, первая заданная частота вращения и вторая заданная частота вращения двигателя могут изменяться согласно требуемой величине движущей силы.
[0015] В транспортном средстве, как описано выше, требуемая движущая сила может включать в себя рабочую величину нажатия педали акселератора, адаптированного с возможностью управляться водителем, и требуемую мощность, которая требуется для транспортного средства.
[0016] В транспортном средстве, как описано выше, электронный модуль управления может быть выполнен с возможностью осуществлять переключение между режимом пониженной передачи и режимом повышенной передачи без прохождения через режим прямого соединения, когда требуемая движущая сила равна или меньше заданной движущей силы.
[0017] Транспортное средство дополнительно может включать в себя вторую вращающуюся машину, соединенную с ведущими колесами таким образом, что вторая вращающаяся машина может передавать крутящий момент на ведущие колеса. Заданная движущая сила может быть равной или меньше движущей силы, которая удовлетворяется, когда максимальный крутящий момент выводится из второй вращающейся машины.
[0018] Транспортное средство дополнительно может включать в себя устройство накопления мощности, выполненное с возможностью подавать электрическую мощность во вторую вращающуюся машину. Максимальный крутящий момент, который может выводиться из второй вращающейся машины, может определяться на основе допустимых рабочих состояний, включающих в себя температурный режим устройства накопления мощности и температурный режим второй вращающейся машины.
[0019] В транспортном средстве, как описано выше, электронный модуль управления может быть выполнен с возможностью осуществлять переключение между режимом пониженной передачи и режимом повышенной передачи без прохождения через режим прямого соединения, когда ограничивается задание режима пониженной передачи.
[0020] Второй аспект изобретения относится к способу управления транспортным средством. Транспортное средство включает в себя двигатель, ведущие колеса, первую вращающуюся машину, трансмиссионный механизм, включающий в себя множество вращающихся элементов, и электронный модуль управления. Множество вращающихся элементов включают в себя первый вращающийся элемент, соединенный с двигателем, второй вращающийся элемент, соединенный с первой вращающейся машиной, и третий вращающийся элемент, соединенный с ведущими колесами таким образом, чтобы третий вращающийся элемент может передавать крутящий момент на ведущие колеса. Трансмиссионный механизм включает в себя первый зацепляющий механизм, выполненный с возможностью избирательно соединять два вращающихся элемента из множества вращающихся элементов, и второй зацепляющий механизм, выполненный с возможностью избирательно соединять два вращающихся элемента из множества вращающихся элементов. Электронный модуль управления выполнен с возможностью управлять двигателем, первой вращающейся машиной, первым зацепляющим механизмом и вторым зацепляющим механизмом. Электронный модуль управления выполнен с возможностью задавать режим пониженной передачи посредством управления первым зацепляющим механизмом в зацепленное состояние и управления вторым зацепляющим механизмом в расцепленное состояние. Режим пониженной передачи представляет собой режим, в котором пропорция крутящего момента равна первому заданному значению. Пропорция крутящего момента представляет собой пропорцию крутящего момента, передаваемого в третий вращающийся элемент, относительно крутящего момента, доставленного из двигателя. Электронный модуль управления выполнен с возможностью задавать режим повышенной передачи посредством управления вторым зацепляющим механизмом в зацепленное состояние и управления первым зацепляющим механизмом в расцепленное состояние. Режим повышенной передачи представляет собой режим, в котором пропорция крутящего момента равна второму заданному значению, которое меньше первого заданного значения. Электронный модуль управления выполнен с возможностью задавать режим прямого соединения посредством управления каждым из первого зацепляющего механизма и второго зацепляющего механизма в зацепленное состояние. Режим прямого соединения представляет собой режим, в котором работа в дифференциальном режиме вращающихся элементов ограничивается. Способ управления включает в себя a) выполнение первого управления переключением посредством электронного модуля управления, когда имеется запрос на переключение из режима пониженной передачи на режим повышенной передачи, b) выполнение второго управления переключением посредством электронного модуля управления, когда имеется запрос на переключение из режима повышенной передачи на режим пониженной передачи. Первое управление переключением включает в себя i) расцепление первого зацепляющего механизма, ii) управление двигателем до первой заданной частоты вращения, iii) управление частотой вращения первой вращающейся машины таким образом, что разность между частотой вращения входного вала и частотой вращения выходного вала второго зацепляющего механизма становится равной или меньшей первого допустимого значения, и iv) переключение второго зацепляющего механизма в зацепленное состояние, когда разность между частотой вращения входного вала и частотой вращения выходного вала второго зацепляющего механизма равна или меньше первого допустимого значения. Второе управление переключением включает в себя v) расцепление второго зацепляющего механизма, vi) управление двигателем до второй заданной частоты вращения, vii) управление частотой вращения первой вращающейся машины таким образом, что разность между частотой вращения входного вала и частотой вращения выходного вала первого зацепляющего механизма становится равной или меньшей второго допустимого значения, и viii) переключение первого зацепляющего механизма в зацепленное состояние, когда разность между частотой вращения входного вала и частотой вращения выходного вала первого зацепляющего механизма равна или меньше второго допустимого значения.
[0021] При вышеуказанной конфигурации, когда режим движения переключается между режимом пониженной передачи и режимом повышенной передачи, один из первого зацепляющего механизма и второго зацепляющего механизма, который в данный момент зацепляется, расцепляется. Соответственно, двигатель, первая вращающаяся машина и ведущие колеса могут отдельно вращаться. А именно, частота вращения двигателя может управляться по мере необходимости. Следовательно, частота вращения двигателя с меньшей вероятностью или с очень небольшой вероятностью должна чрезмерно уменьшаться и может изменяться в соответствии с требуемой движущей силой. Как результат, водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение во время переключения режима движения. Кроме того, частота вращения первой вращающейся машины управляется во время переключения режима движения таким образом, чтобы уменьшать разность между частотой вращения входного вала и частотой вращения выходного вала зацепляющего механизма, который должен зацепляться. Поскольку зацепляющий механизм может зацепляться в этом состоянии, толчок, который должен возникать при зацеплении зацепляющего механизма, может уменьшаться или исключаться.
Краткое описание чертежей
[0022] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является принципиальной схемой, иллюстрирующей один пример первого модуля привода;
Фиг. 2 является принципиальной схемой, иллюстрирующей один пример второго модуля привода;
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию электронного модуля управления (ECU);
Фиг. 4 является таблицей, показывающей зацепленные и расцепленные состояния механизмов муфты и тормозного механизма, рабочие состояния электромоторов и активацию/деактивацию приведения в действие двигателя, в каждом режиме движения;
Фиг. 5 является номограммой, иллюстрирующей рабочие состояния в HV-Hi-режиме;
Фиг. 6 является номограммой, иллюстрирующей рабочие состояния в HV-Lo-режиме;
Фиг. 7 является номограммой, иллюстрирующей рабочие состояния в режиме прямого соединения;
Фиг. 8 является номограммой, иллюстрирующей рабочие состояния в EV-Lo-режиме;
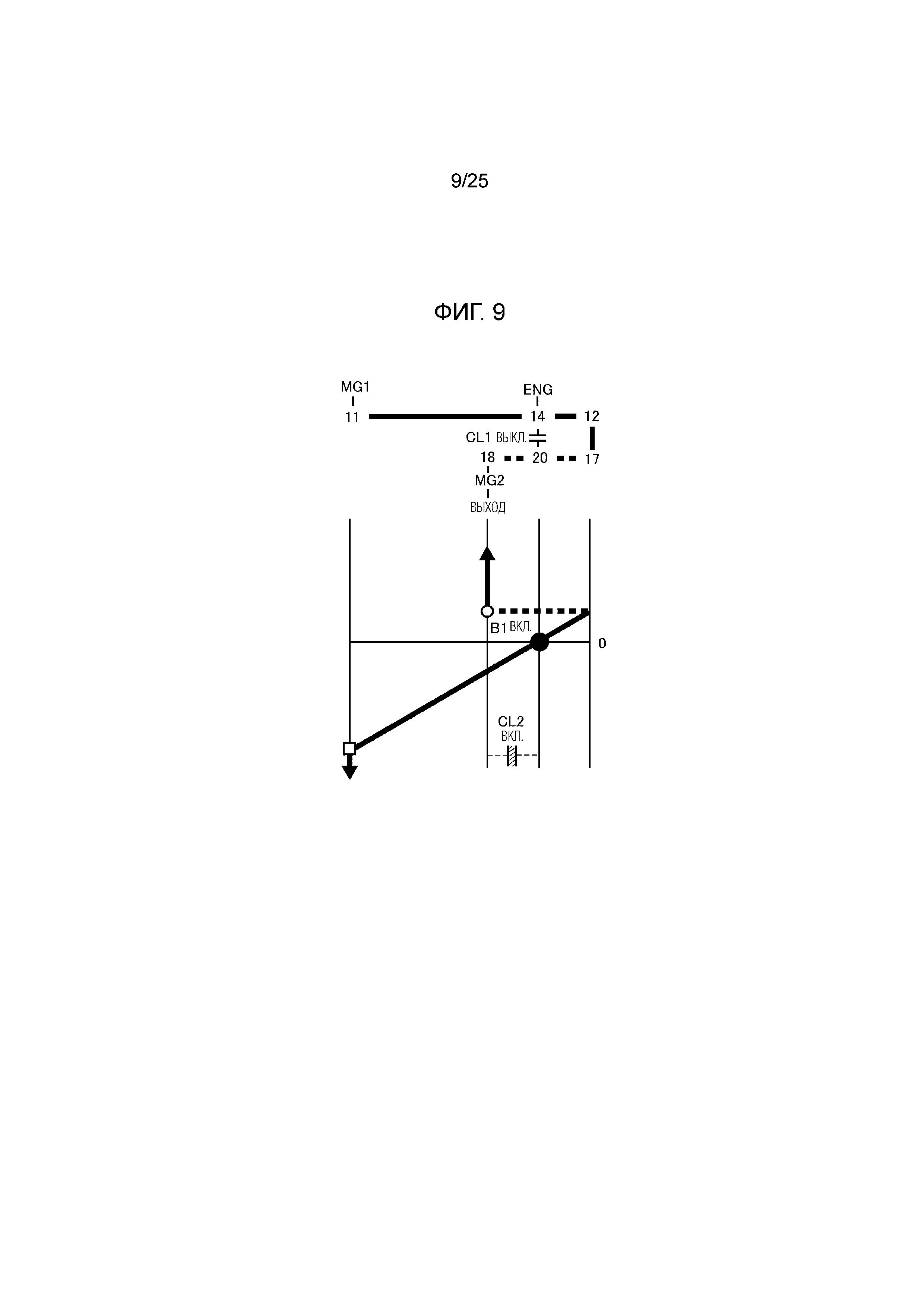
Фиг. 9 является номограммой, иллюстрирующей рабочие состояния в EV-Hi-режиме;
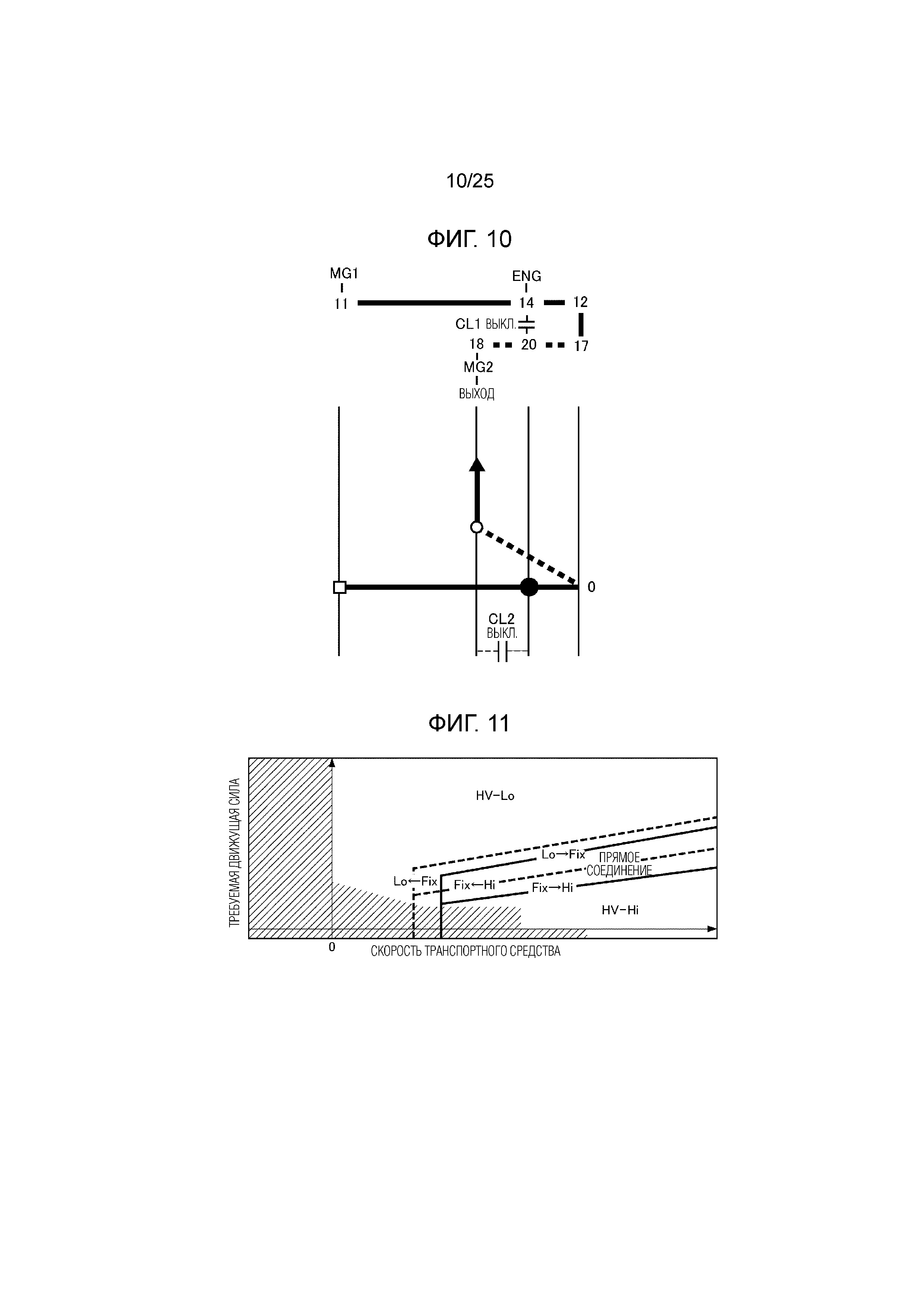
Фиг. 10 является номограммой, иллюстрирующей рабочие состояния в одиночном режиме;
Фиг. 11 является видом, показывающим один пример карты для определения каждого режима движения, когда выбирается CS-режим;
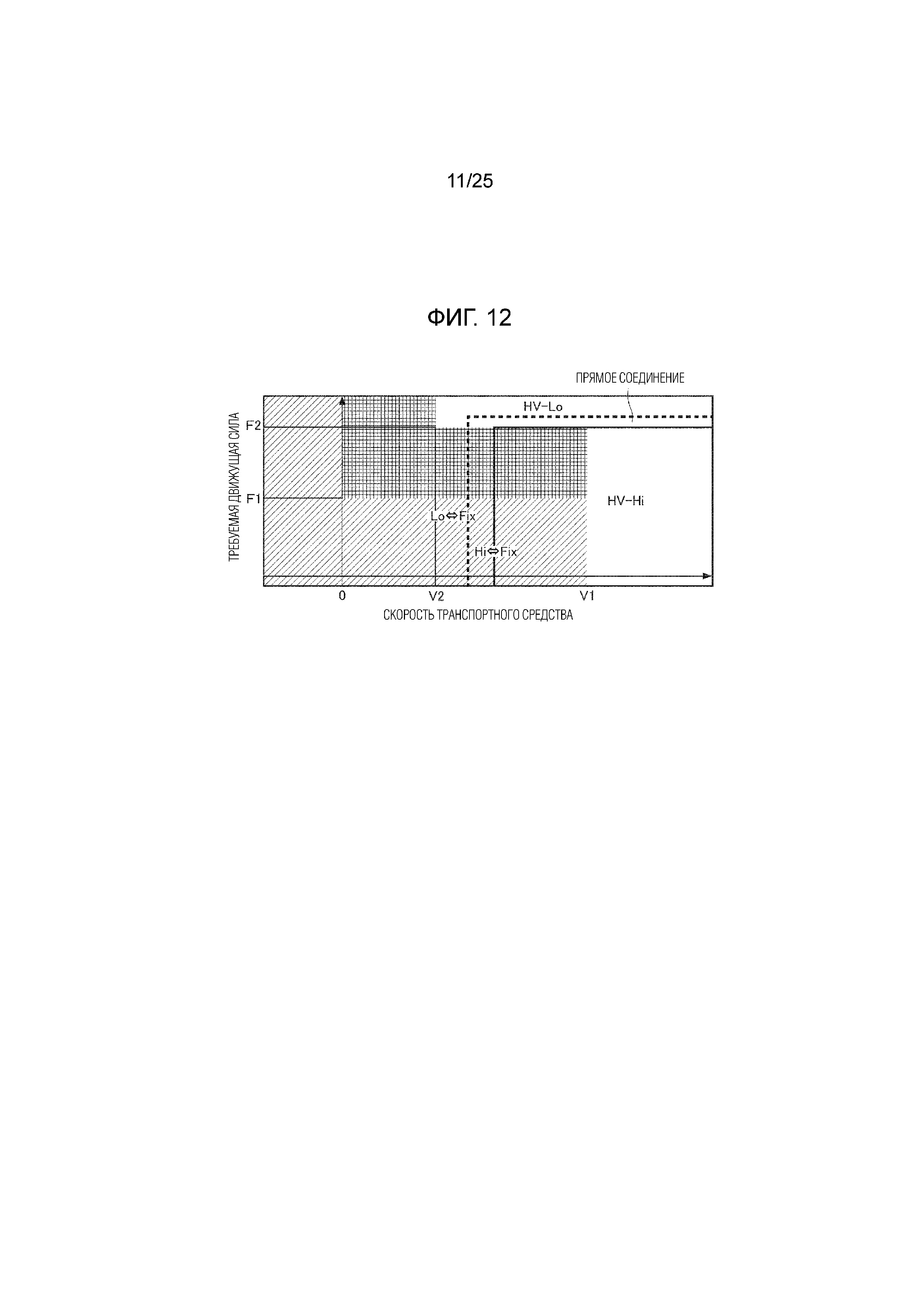
Фиг. 12 является видом, показывающим один пример карты для определения каждого режима движения, когда выбирается CD-режим;
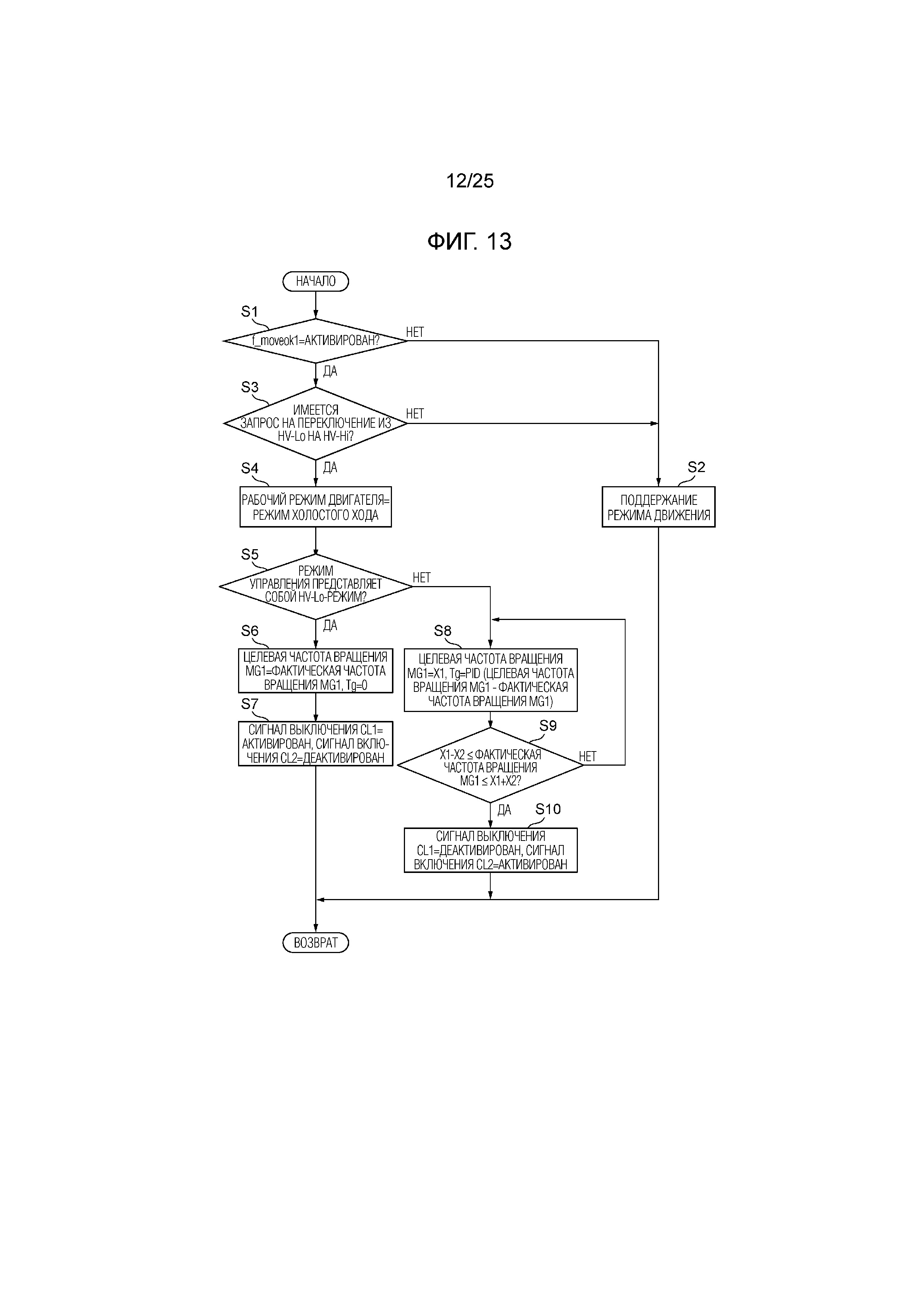
Фиг. 13 является блок-схемой последовательности операций способа, иллюстрирующей пример управления, выполняемого, когда транспортное средство переключается между HV-Lo-режимом и HV-Hi-режимом без прохождения через режим прямого соединения, при движении на низкой скорости;
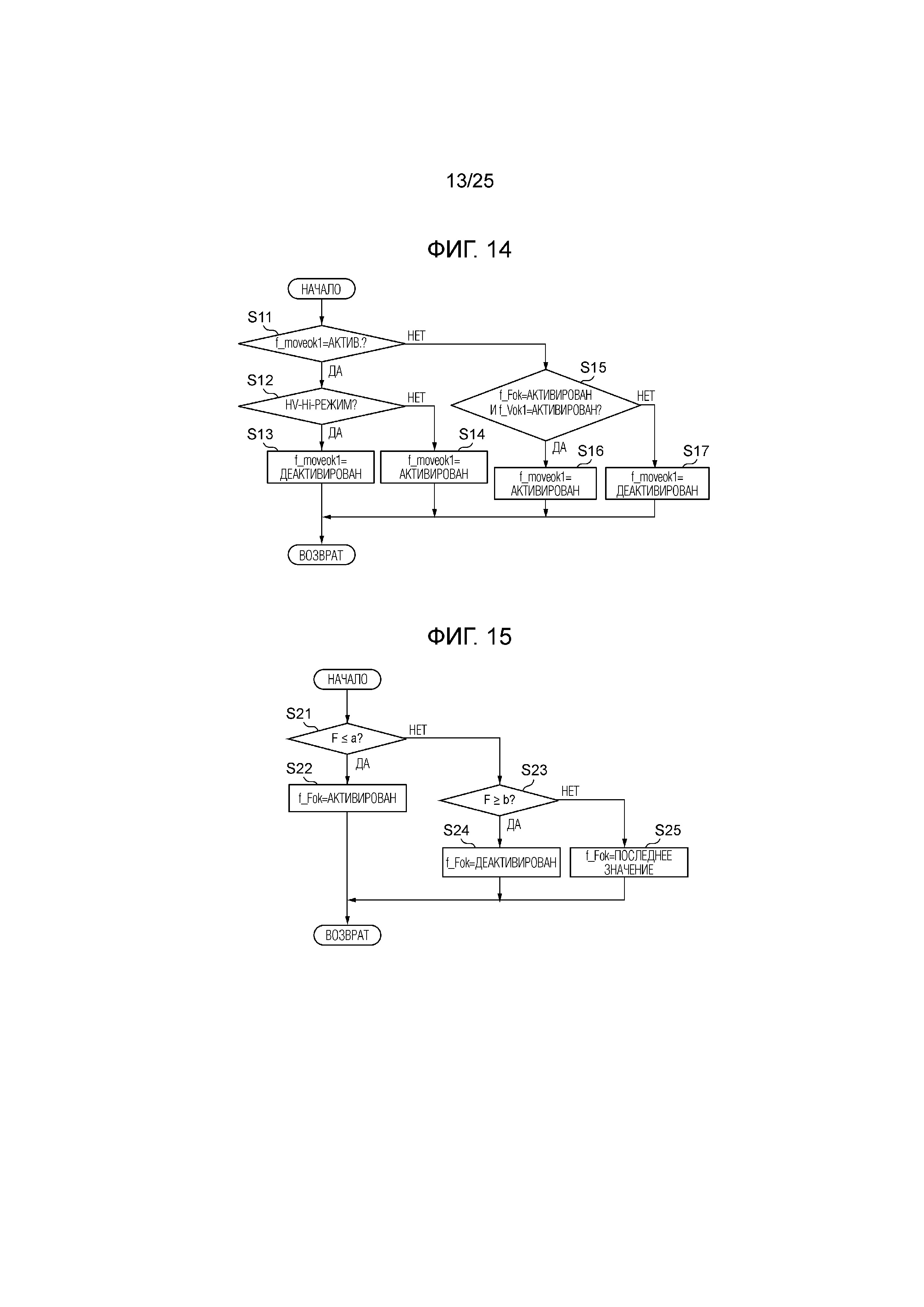
Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей пример управления для задания флага f_moveok1;
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей пример управления для задания флага f_Fok;
Фиг. 16 является видом, показывающим один пример карты для определения первой движущей силы;
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей пример управления для задания флага f_Vok1;
Фиг. 18 является временной диаграммой, иллюстрирующей один пример изменений режима управления и т.д., когда транспортное средство переключается из HV-Lo-режима на HV-Hi-режим без прохождения через режим прямого соединения, при движении на низкой скорости;
Фиг. 19 является номограммой, иллюстрирующей изменение частоты вращения вращающегося элемента механизма деления мощности, когда транспортное средство переключается из HV-Lo-режима на HV-Hi-режим при движении на низкой скорости;
Фиг. 20 является блок-схемой последовательности операций способа, иллюстрирующей один пример управления для переключения транспортного средства из HV-Lo-режима на HV-Hi-режим при управлении частотой вращения двигателя согласно операции нажатия педали акселератора водителем;
Фиг. 21 является блок-схемой последовательности операций способа, иллюстрирующей пример управления для задания флага f_moveok2;
Фиг. 22 является блок-схемой последовательности операций способа, иллюстрирующей пример управления для задания флага f_Vok2;
Фиг. 23 является видом, показывающим один пример карты для определения величины изменения частоты вращения двигателя в процессе переключения из HV-Lo-режима на HV-Hi-режим;
Фиг. 24 является временной диаграммой, иллюстрирующей один пример изменений режима управления и т.д., когда транспортное средство переключается из HV-Lo-режима на HV-Hi-режим при управлении частотой вращения двигателя согласно операции нажатия педали акселератора водителем;
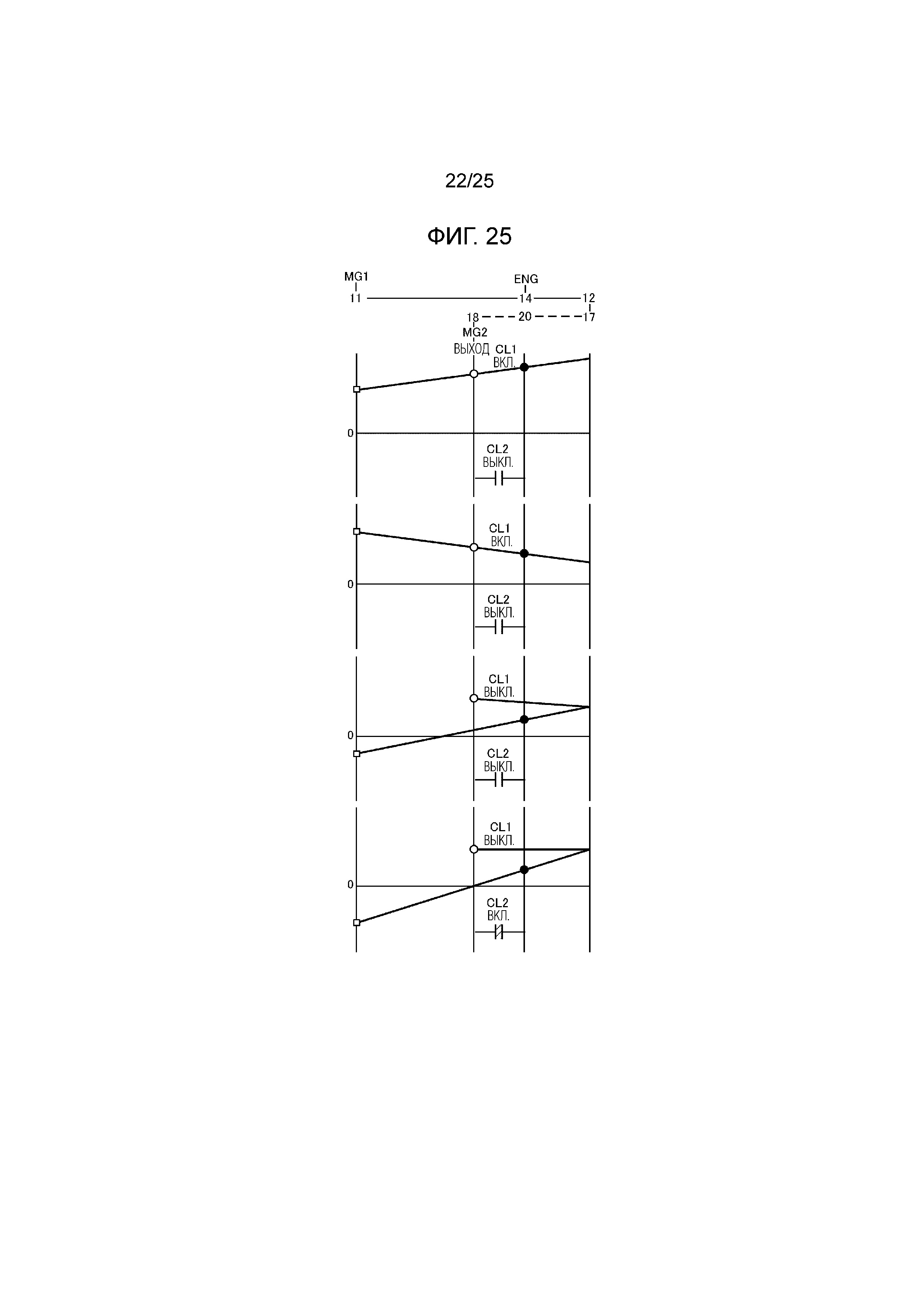
Фиг. 25 является номограммой, иллюстрирующей изменение частоты вращения вращающегося элемента механизма деления мощности, когда транспортное средство переключается из HV-Lo-режима на HV-Hi-режим при управлении частотой вращения двигателя согласно операции нажатия педали акселератора водителем;
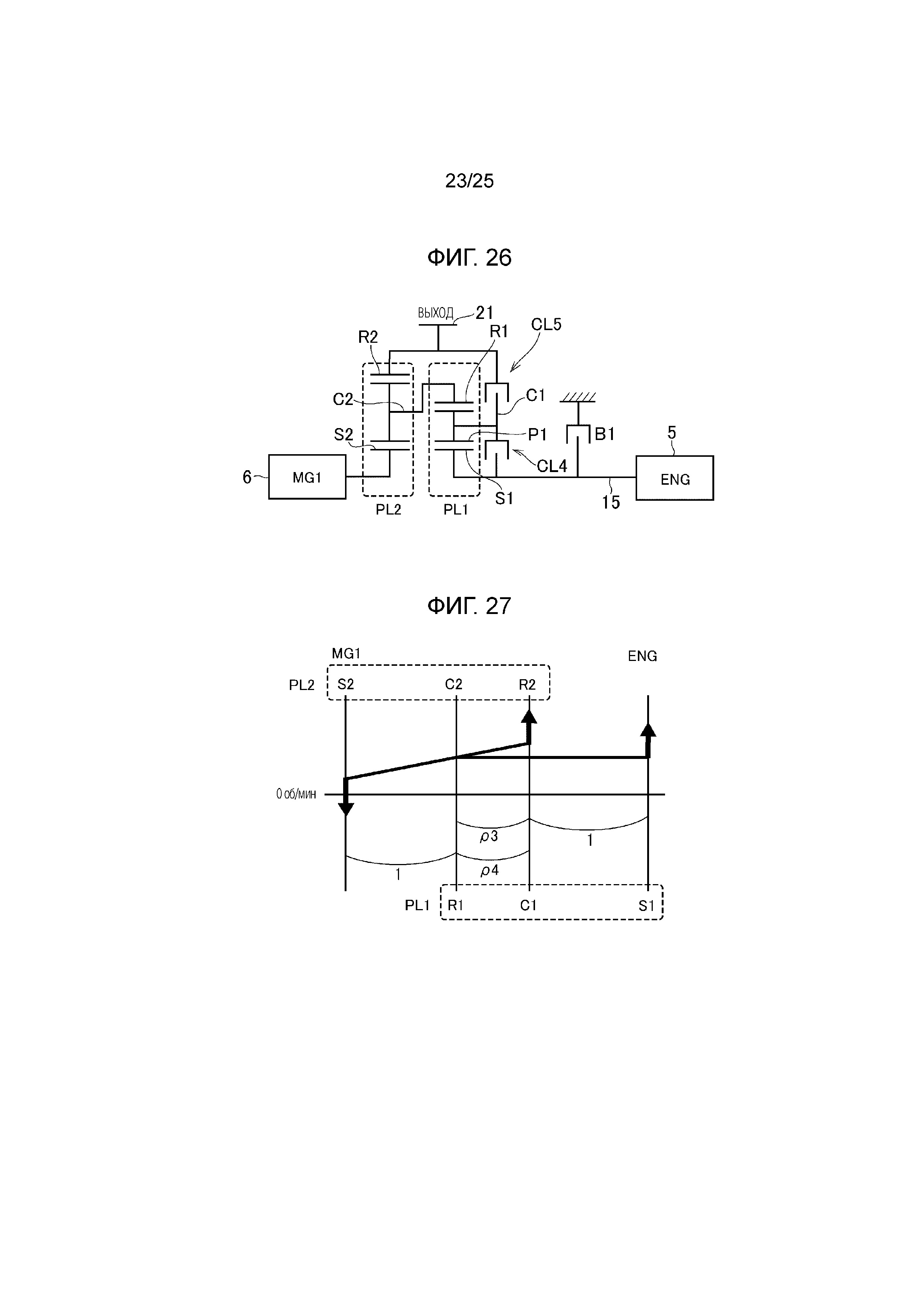
Фиг. 26 является принципиальной схемой, иллюстрирующей другую конфигурацию транспортного средства, к которому может применяться изобретение;
Фиг. 27 является номограммой, иллюстрирующей рабочие состояния вращающегося элемента, когда транспортное средство, показанное на фиг. 26, переводится в HV-Hi-режим;
Фиг. 28 является номограммой, иллюстрирующей рабочие состояния вращающегося элемента, когда транспортное средство, показанное на фиг. 26, переводится в HV-Lo-режим;
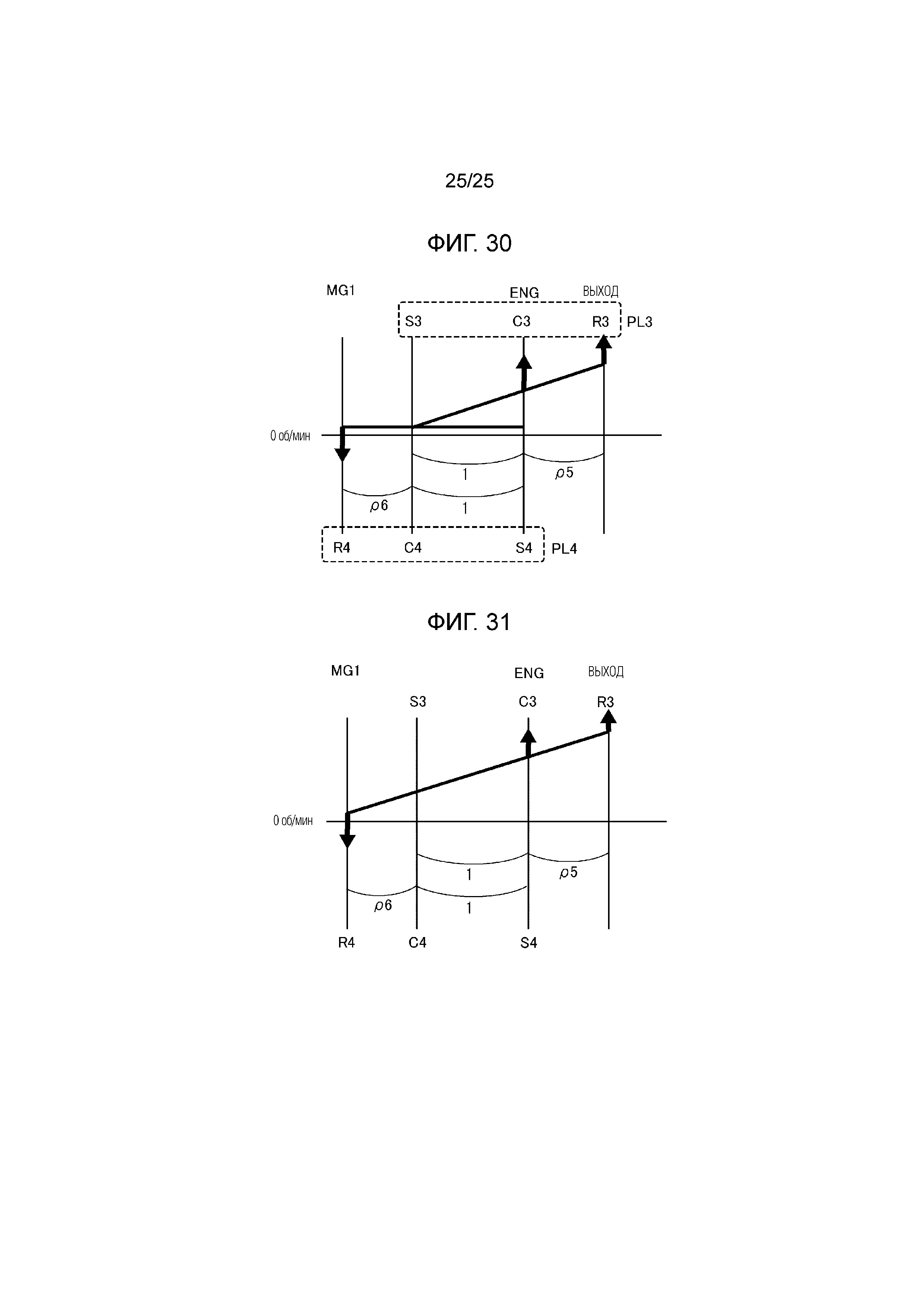
Фиг. 29 является принципиальной схемой, иллюстрирующей еще одну другую конфигурацию транспортного средства, к которому может применяться изобретение;
Фиг. 30 является номограммой, иллюстрирующей рабочие состояния вращающегося элемента, когда транспортное средство, показанное на фиг. 29, переводится в HV-Hi-режим; и
Фиг. 31 является номограммой, иллюстрирующей рабочие состояния вращающегося элемента, когда транспортное средство, показанное на фиг. 29, переводится в HV-Lo-режим.
Подробное описание вариантов осуществления изобретения
[0023] Со ссылкой на фиг. 1 и 2 далее описывается один пример транспортного средства согласно одному варианту осуществления изобретения. Фиг. 1 показывает первый модуль 2 привода для приведения в движение передних колес 1R, 1L, и фиг. 2 показывает второй модуль 4 привода для приведения в движение задних колес 3R, 3L. Первый модуль 2 привода представляет собой так называемый модуль привода с двумя электромоторами, включающий в себя двигатель 5 и два электромотора 6, 7 в качестве источников мощности приведения в движение. Первый электромотор 6 предоставляется посредством электромотора (так называемого электромотора-генератора: MG1), имеющего функцию выработки электрической мощности. Первый модуль 2 привода имеет такую конфигурацию, в которой частота вращения двигателя 5 управляется посредством первого электромотора 6, и второй электромотор 7 приводится в действие с электрической мощностью, вырабатываемой посредством первого электромотора 6, тогда как движущая сила, доставляемая посредством второго электромотора 7, может суммироваться с движущей силой для приведения в движение транспортного средства. Второй электромотор 7 предоставляется посредством электромотора (так называемого электромотора-генератора: MG2), имеющего функцию выработки электрической мощности. Первый электромотор 6 представляет собой один пример "первой вращающейся машины" в этом варианте осуществления изобретения, и второй электромотор 7 представляет собой один пример "второй вращающейся машины" в этом варианте осуществления изобретения.
[0024] Двигатель 5 может быть сконструирован аналогично традиционным двигателям и включает в себя впускную трубу 5a, через которую наружный воздух протекает снаружи к цилиндрам (не показаны) двигателя 5, и электронный дроссельный клапан 5b, который управляет расходом наружного воздуха, протекающего через впускную трубу 5a. Перепускной канал 5c, который перепускает электронный дроссельный клапан 5b, формируется во впускной трубе 5a и клапане 5d регулирования частоты вращения на холостом ходу (ISC), который управляет расходом наружного воздуха, протекающего через перепускной канал 5c, предоставляется в перепускном канале 5c. Открытие электронного дроссельного клапана 5b управляется согласно движущей силе, требуемой водителем, и открытие ISC-клапана 5d управляется согласно частоте вращения на холостом ходу. Частота вращения на холостом ходу определяется, например, на основе требуемой величины прогрева двигателя 5.
[0025] С двигателем 5 соединяется механизм 8 деления мощности в качестве одного примера "трансмиссионного механизма" в этом варианте осуществления изобретения. Механизм 8 деления мощности состоит из модуля 9 деления мощности, который главным образом функционирует с возможностью делить крутящий момент, доставленный из двигателя 5, на сторону первого электромотора 6 и сторону выходного вала, и модуля 10 переключения частоты вращения, который главным образом функционирует с возможностью изменять коэффициент деления крутящего момента.
[0026] Модуль 9 деления мощности должен быть выполнен с возможностью только осуществлять работу в дифференциальном режиме посредством использования трех вращающихся элементов и может использовать планетарный зубчатый механизм. В примере, показанном на фиг. 1, модуль 9 деления мощности имеет форму планетарного зубчатого механизма односателлитного типа. Модуль 9 деления мощности, показанный на фиг. 1, состоит преимущественно из солнечной шестерни 11, коронной шестерни 12 в качестве шестерни с внутренними зубьями, расположенной концентрически с солнечной шестерней 11, сателлитных шестерней 13, которые располагаются между солнечной шестерней 11 и коронной шестерней 12 и вводятся в зацепление с солнечной шестерней 11 и коронной шестерней 12, и водила 14, которое удерживает сателлитные шестерни 13 таким образом, что сателлитные шестерни 13 могут поворачиваться вокруг себя и вокруг оси модуля 9 деления мощности. Солнечная шестерня 11 главным образом функционирует в качестве элемента силы реакции, и коронная шестерня 12 главным образом функционирует в качестве элемента выходного вала, тогда как водило 14 главным образом функционирует в качестве элемента входного вала. Водило 14 представляет собой один пример "первого вращающегося элемента" в этом варианте осуществления изобретения, и солнечная шестерня 11 представляет собой один пример "второго вращающегося элемента" в этом варианте осуществления изобретения.
[0027] Водило 14 выполнено с возможностью принимать мощность, доставляемую посредством двигателя 5. Более конкретно, входной вал 16 механизма 8 деления мощности соединяется с выходным валом 15 двигателя 5, и входной вал 16 соединяется с водилом 14. Вместо компоновки, в которой водило 14 и входной вал 16 непосредственно соединяются друг с другом, водило 14 и входной вал 16 могут соединяться через трансмиссионный механизм, такой как зубчатый механизм. Кроме того, демпфирующий механизм или преобразователь крутящего момента могут располагаться между выходным валом 15 и входным валом 16.
[0028] Первый электромотор 6 соединяется с солнечной шестерней 11. В примере, показанном на фиг. 1, модуль 9 деления мощности и первый электромотор 6 располагаются на оси, идентичной оси центра вращения двигателя 5, и первый электромотор 6 расположен на одной стороне модуля 9 деления мощности напротив двигателя 5. Между модулем 9 деления мощности и двигателем 5, модуль 10 переключения частоты вращения располагается на оси, идентичной оси модуля 9 деления мощности и двигателя 5 таким образом, что модуль 9 деления мощности, модуль 10 переключения частоты вращения и двигатель 5 размещаются в направлении этой оси.
[0029] Модуль 10 переключения частоты вращения имеет форму планетарного зубчатого механизма односателлитного типа и имеет солнечную шестерню 17, коронную шестерню 18 в качестве шестерни с внутренними зубьями, расположенной концентрически с солнечной шестерней 17, сателлитные шестерни 19, которые располагаются между солнечной шестерней 17 и коронной шестерней 18 и вводятся в зацепление с солнечной шестерней 17 и коронной шестерней 18, и водило 20, которое удерживает сателлитные шестерни 19 таким образом, что сателлитные шестерни 19 могут поворачиваться вокруг себя и вокруг оси модуля 10 переключения частоты вращения. Модуль 10 переключения частоты вращения представляет собой дифференциальный механизм, который выполняет работу в дифференциальном режиме посредством использования трех вращающихся элементов, т.е. солнечной шестерни 17, коронной шестерни 18 и водила 20. Коронная шестерня 12 модуля 9 деления мощности соединяется с солнечной шестерней 17 модуля 10 переключения частоты вращения. Выходная шестерня 21 соединяется с коронной шестерней 18 модуля 10 переключения частоты вращения. Коронная шестерня 18 представляет собой один пример "третьего вращающегося элемента" в этом варианте осуществления изобретения.
[0030] Первый механизм CL1 муфты предоставляется таким образом, что модуль 9 деления мощности и модуль 10 переключения частоты вращения составляют составной планетарный зубчатый механизм. Первый механизм CL1 муфты выполнен с возможностью избирательно соединять водило 20 модуля 10 переключения частоты вращения с водилом 14 модуля 9 деления мощности. Первый механизм CL1 муфты может представлять собой механизм муфты фрикционного типа, такой как многодисковая мокрая муфта, или механизм муфты на основе ввода в зацепление, такой как кулачковая муфта. Когда первый механизм CL1 муфты зацепляется, формируется составной планетарный зубчатый механизм, в котором водило 14 модуля 9 деления мощности и водило 20 модуля 10 переключения частоты вращения соединяются друг с другом, чтобы предоставлять элемент входного вала, и солнечная шестерня 11 модуля 9 деления мощности предоставляет элемент силы реакции, тогда как коронная шестерня 18 модуля 10 переключения частоты вращения предоставляет элемент выходного вала. Таким образом, вращающиеся элементы 11, 12, 14, которые составляют модуль 9 деления мощности, и вращающиеся элементы 17, 18, 20, которые составляют модуль 10 переключения частоты вращения, представляют собой один пример "множества вращающихся элементов" в этом варианте осуществления изобретения.
[0031] Дополнительно, второй механизм CL2 муфты предоставляется для интегрирования модуля 10 переключения частоты вращения в целом. Второй механизм CL2 муфты служит для того, чтобы соединять, по меньшей мере, два вращающихся элемента, например, соединять водило 20 и коронную шестерню 18 либо солнечную шестерню 17 или солнечную шестерню 17 и коронную шестерню 18, в модуле 10 переключения частоты вращения и может предоставляться посредством механизма муфты фрикционного типа или на основе ввода в зацепление. В примере, показанном на фиг. 1, второй механизм CL2 муфты выполнен с возможностью соединять водило 20 с коронной шестерней 18 в модуле 10 переключения частоты вращения. Первый механизм CL1 муфты и второй механизм CL2 муфты располагаются на оси, идентичной оси двигателя 5, модуля 9 деления мощности и модуля 10 переключения частоты вращения, и расположен на одной стороне модуля 10 переключения частоты вращения, противоположной модулю 9 деления мощности. Механизмы CL1, CL2 муфты могут размещаться на радиально внутренней стороне и радиально внешней стороне в радиальных направлениях, как показано на фиг. 1, либо могут размещаться рядом в осевом направлении. Когда механизмы CL1, CL2 муфты размещаются в радиальных направлениях, как показано на фиг. 1, осевая длина первого модуля 2 привода в целом может уменьшаться. Когда механизмы CL1, CL2 муфты размещаются в осевом направлении, ограничения на внешние диаметры механизмов CL1, CL2 муфты уменьшаются. Таким образом, когда используется механизм муфты фрикционного типа, число фрикционных дисков, используемых в механизме муфты, может уменьшаться.
[0032] Обратный вал 22 располагается параллельно с осью центра вращения двигателя 5, модуля 9 деления мощности или модуля 10 переключения частоты вращения. Ведомая шестерня 23, которая вводится в зацепление с выходной шестерней 21, монтируется на обратном валу 22. Ведущая шестерня 24 также монтируется на обратном валу 22, и ведущая шестерня 24 вводится в зацепление с коронной шестерней 26 блока 25 дифференциала в качестве конечной редукторной шестерни. Дополнительно, ведущая шестерня 28, смонтированная на валу 27 ротора второго электромотора 7, вводится в зацепление с ведомой шестерней 23. Соответственно, мощность или крутящий момент, сформированный посредством второго электромотора 7, суммируются с мощностью или крутящим моментом, доставленным из выходной шестерни 21 в ведомой шестерне 23. Мощность или крутящий момент, комбинированный таким способом, доставляется из блока 25 дифференциала на правое и левое ведущие валы 29 таким образом, что мощность или крутящий момент передается на передние колеса 1R, 1L.
[0033] Первый модуль 2 привода дополнительно содержит первый тормозной механизм B1 фрикционного типа или на основе ввода в зацепление. Первый тормозной механизм B1 выполнен с возможностью избирательно стопорить выходной вал 15 или входной вал 16 таким образом, что движущий крутящий момент, доставленный из первого электромотора 6, может передаваться на передние колеса 1R, 1L. А именно, когда выходной вал 15 или входной вал 16 стопорится посредством первого тормозного механизма B1, водило 14 модуля 9 деления мощности или водило 20 модуля 10 переключения частоты вращения функционирует в качестве элемента силы реакции, и солнечная шестерня 11 модуля 9 деления мощности функционирует в качестве элемента входного вала. Первый тормозной механизм B1 должен формировать реактивный крутящий момент только тогда, когда первый электромотор 6 доставляет движущий крутящий момент, и не ограничен такой конфигурацией, чтобы полностью стопорить выходной вал 15 или входной вал 16, но может прикладывать требуемый реактивный крутящий момент к выходному валу 15 или входному валу 16. Альтернативно, односторонняя муфта, которая запрещает вращение выходного вала 15 или входного вала 16 в направлении, противоположном направлению вращения двигателя 5, когда он приводится в действие, может предоставляться вместо первого тормозного механизма B1.
[0034] Второй модуль 4 привода выполнен с возможностью передавать мощность или крутящий момент заднего электромотора 30 на задние колеса 3R, 3L. На фиг. 2, левое заднее колесо 3L не проиллюстрировано для удобства. Задний электромотор 30 предоставляется посредством электромотора (т.е. электромотора-генератора: MGR), имеющего функцию выработки электрической мощности, такого как первый электромотор 6 и второй электромотор 7. Механизм 31 переключения частоты вращения, соединенный с задним электромотором 30, выполнен с возможностью избирательно переключаться между позицией редукторной шестерни для усиления крутящего момента заднего электромотора 30 и позицией застопоренной шестерни для разрешения доставки крутящего момента заднего электромотора 30 как есть без изменения.
[0035] Механизм 31 переключения частоты вращения, показанный на фиг. 2, имеет форму планетарного зубчатого механизма односателлитного типа, имеющего солнечную шестерню 32, коронную шестерню 33 в качестве шестерни с внутренними зубьями, расположенной концентрически с солнечной шестерней 32, сателлитные шестерни 34, которые располагаются между солнечной шестерней 32 и коронной шестерней 33 и вводятся в зацепление с солнечной шестерней 32 и коронной шестерней 33, и водило 35, которое удерживает сателлитные шестерни 34 таким образом, что сателлитные шестерни 34 могут поворачиваться вокруг себя и вокруг оси механизма 31 переключения частоты вращения.
[0036] Солнечная шестерня 32 механизма 31 переключения частоты вращения соединяется с задним электромотором 30 и функционирует в качестве элемента входного вала. Водило 35 соединяется с выходным валом 36 и функционирует в качестве элемента выходного вала. Третий механизм CL3 муфты предоставляется для размещения механизма 31 переключения частоты вращения в позиции застопоренной шестерни. Третий механизм CL3 муфты выполнен с возможностью соединять, по меньшей мере, два вращающихся элемента, например, соединять солнечную шестерню 32 и коронную шестерню 33 или водило 35 либо коронную шестерню 33 и водило 35, в механизме 31 переключения частоты вращения, и может предоставляться посредством механизма муфты фрикционного типа или на основе ввода в зацепление. В примере, показанном на фиг. 2, третий механизм CL3 муфты выполнен с возможностью соединять коронную шестерню 33 с водилом 35 в механизме 31 переключения частоты вращения.
[0037] Дополнительно, второй тормозной механизм B2 предоставляется для размещения механизма 31 переключения частоты вращения в позиции редукторной шестерни. Второй тормозной механизм B2 может иметь форму зацепляющего механизма фрикционного типа или на основе ввода в зацепление, который выполнен с возможностью избирательно стопорить коронную шестерню 33 механизма 31 переключения частоты вращения. Второй тормозной механизм B2, показанный на фиг. 2, зацепляет коронную шестерню 33 с кожухом C, в котором размещается второй модуль 4 привода, с тем чтобы стопорить коронную шестерню 33. Таким образом, коронная шестерня 33 функционирует в качестве элемента силы реакции, когда она стопорится посредством второго тормозного механизма B2. Аналогично первому тормозному механизму B1, второй тормозной механизм B2 не ограничен механизмом, который полностью стопорит коронную шестерню 33.
[0038] Ведущая шестерня 37 монтируется на выходном валу 36 механизма 31 переключения частоты вращения. Обратный вал 38 располагается параллельно с выходным валом 36 и ведомой шестерней 39, которая вводится в зацепление с ведущей шестерней 37, монтируется на одном конце обратного вала 38. Ведомая шестерня 39 формируется с диаметром, большим диаметра ведущей шестерни 37, и в силу этого выполнена с возможностью усиливать выходной крутящий момент механизма 31 переключения частоты вращения. Ведущая шестерня 40 монтируется на другом концевом участке обратного вала 38, и ведущая шестерня 40 вводится в зацепление с коронной шестерней 42 блока 41 дифференциала в качестве конечной редукторной шестерни. Ведущий вал 43 соединяется с блоком 41 дифференциала, и мощность, доставленная из заднего электромотора 30, передается на задние колеса 3R, 3L через ведущий вал 43.
[0039] Первый модуль 44 управления мощностью, включающий в себя инвертор и преобразователь, соединяется с первым электромотором 6, и второй модуль 45 управления мощностью, включающий в себя инвертор и преобразователь, соединяется со вторым электромотором 7, тогда как третий модуль 46 управления мощностью, включающий в себя инвертор и преобразователь, соединяется с задним электромотором 30. Эти модули 44, 45, 46 управления мощностью соединяются с устройством 47 накопления мощности в форме литий-ионного аккумулятора или конденсатора. Первый модуль 44 управления мощностью, второй модуль 45 управления мощностью и третий модуль 46 управления мощностью также выполнены с возможностью подавать электрическую мощность друг другу. Более конкретно, когда первый электромотор 6 формирует крутящий момент за счет силы реакции, чтобы в силу этого выступать в качестве генератора, электрическая мощность, вырабатываемая посредством первого электромотора 6, может подаваться во второй электромотор 7 и задний электромотор 30 без прохождения через устройство 47 накопления мощности.
[0040] Электронный модуль 48 управления (ECU) предоставляется для управления инверторами и преобразователями модулей 44, 45, 46 управления мощностью, двигателя 5, механизмов CL1, CL2, CL3 муфты и тормозных механизмов B1, B2. ECU 48 представляет собой один пример "электронного модуля управления" в этом варианте осуществления изобретения и состоит главным образом из микрокомпьютера. Фиг. 3 является блок-схемой, иллюстрирующей один пример конфигурации ECU 48. В примере, показанном на фиг. 3, ECU 48 состоит из интегрального ECU 49, MG ECU 50, ECU 51 двигателя и ECU 52 муфты.
[0041] Интегральный ECU 49 принимает данные из различных датчиков, установленных на транспортном средстве, и выводит сигналы команд управления в MG ECU 50, ECU 51 двигателя и ECU 52 муфты, на основе принимаемых данных и карт, арифметических выражений и т.д., сохраненных заранее. Один пример данных, принимаемых посредством интегрального ECU 49, показан на фиг. 3. В этом примере, интегральный ECU 49 принимает данные, включающие в себя, например, скорость транспортного средства, рабочую величину нажатия педали акселератора, частоту вращения первого электромотора 6 (MG1), частоту вращения второго электромотора 7 (MG2), частоту вращения заднего электромотора 30 (MGR), частоту вращения (частоту вращения двигателя) выходного вала 15 двигателя 5, частоту вращения выходного вала в качестве частоты вращения коронной шестерни 18 модуля 10 переключения частоты вращения или обратного вала 22, величину хода поршня, предоставленного в каждом из механизмов CL1, CL2, CL3 муфты и тормозных механизмов B1, B2, температуру устройства 47 накопления мощности, температуры модулей 44, 45, 46 управления мощностью, температуру первого электромотора 6, температуру второго электромотора 7, температуру заднего электромотора 30, температуру масла (ATF), которое смазывает модуль 9 деления мощности и модуль 10 переключения частоты вращения или механизм 31 переключения частоты вращения, и оставшуюся величину заряда (SOC) устройства 47 накопления мощности.
[0042] Интегральный ECU 49 получает рабочие состояния (выходной крутящий момент и частоту вращения) первого электромотора 6, рабочие состояния (выходной крутящий момент и частоту вращения) второго электромотора 7 и рабочие состояния (выходной крутящий момент и частоту вращения) заднего электромотора 30, на основе принимаемых данных и выводит полученные данные в качестве сигналов команд управления в MG ECU 50. Аналогично, интегральный ECU 49 получает рабочие состояния (выходной крутящий момент и частоту вращения) двигателя 5 на основе принимаемых данных и выводит полученные данные в качестве сигналов команд управления в ECU 51 двигателя. Дополнительно, интегральный ECU 49 получает перегрузочную способность по передаточному крутящему моменту (включающую в себя 0) каждого из механизмов CL1, CL2, CL3 муфты и тормозных механизмов B1, B2, на основе принимаемых данных и выводит полученные данные в качестве сигналов команд управления в ECU 52 муфты.
[0043] MG ECU 50 получает значения тока, представляющие ток, который должен проходить через соответствующие электромоторы 6, 7, 30, на основе данных, принимаемых из интегрального ECU 49, и выводит сигналы команд управления в электромоторы 6, 7, 30. Поскольку каждый электромотор 6, 7, 30 представляет собой электромотор переменного тока (AC), сигнал команды управления включает в себя частоту электрического тока, который должен формироваться в инверторе, и значение напряжения, до которого напряжение должно повышаться посредством преобразователя.
[0044] ECU 51 двигателя получает ток для фиксирования открытия электронного дроссельного клапана 5b, ток для зажигания топлива в устройствах зажигания, ток для фиксирования открытия клапана регулирования рециркуляции выхлопных газов (EGR), значение тока для фиксирования открытий впускных клапанов и выпускных клапанов, ток для фиксирования открытия ISC-клапана 5d и т.д., на основе данных, принимаемых из интегрального ECU 49, и выводит сигналы команд управления в соответствующие клапаны и устройства. А именно, ECU 51 двигателя выводит сигналы команд управления для управления выводом (мощностью) двигателя 5, выходным крутящим моментом двигателя 5 или частотой вращения двигателя.
[0045] ECU 52 муфты получает значение тока, представляющее ток, который должен проходить через актуатор, который определяет давление зацепления каждого из механизмов CL1, CL2, CL3 муфты и тормозных механизмов B1, B2, на основе данных, принимаемых из интегрального ECU 49, и выводит сигнал команды управления в актуатор каждого механизма.
[0046] Первый модуль 2 привода может переводиться в один из HV-режима движения, в котором движущий крутящий момент доставляется из двигателя 5, и EV-режима движения, в котором транспортное средство движется с движущим крутящим моментом, доставленным из первого электромотора 6 и второго электромотора 7. Дополнительно, выбранный один из HV-Lo-режима, HV-Hi-режима и режима прямого соединения задается в качестве HV-режима движения. В HV-Lo-режиме, частота вращения двигателя 5 (или входного вала 16) выше частоты вращения коронной шестерни 18 модуля 10 переключения частоты вращения, когда первый электромотор 6 вращается на низкой частоте вращения (что включает в себя вращение на нулевой частоте вращения). В HV-Hi-режиме, частота вращения двигателя 5 (или входного вала 16) ниже частоты вращения коронной шестерни 18 модуля 10 переключения частоты вращения. В режиме прямого соединения, частота вращения коронной шестерни 18 модуля 10 переключения частоты вращения равна частоте вращения двигателя 5 (или входного вала 16), а именно, работа в дифференциальном режиме вращающихся элементов, которые составляют механизм 8 деления мощности, ограничивается. HV-Lo-режим представляет собой один пример "режима пониженной передачи" в этом варианте осуществления изобретения, и HV-Hi-режим представляет собой один пример "режима повышенной передачи" в этом варианте осуществления изобретения.
[0047] Кроме того, в качестве EV-режима движения, можно избирательно задавать сдвоенный режим, в котором движущий крутящий момент доставляется из первого электромотора 6 и второго электромотора 7, и одиночный режим, в котором движущий крутящий момент доставляется только из второго электромотора 7, при том, что движущий крутящий момент не доставляется из первого электромотора 6. Дополнительно, в качестве сдвоенного режима, можно избирательно задавать EV-Lo-режим, имеющий относительно большой коэффициент усиления крутящего момента, доставленного из первого электромотора 6, и EV-Hi-режим, имеющий относительно небольшой коэффициент усиления крутящего момента, доставленного из первого электромотора 6. В одиночном режиме, транспортное средство может двигаться с движущим крутящим моментом, доставляемым только из второго электромотора 7, в состоянии, в котором первый механизм CL1 муфты зацепляется, или транспортное средство может двигаться с движущим крутящим моментом, доставляемым только из второго электромотора 7, в состоянии, в котором второй механизм CL2 муфты зацепляется, или транспортное средство может двигаться с движущим крутящим моментом, доставляемым только из второго электромотора 7, в состоянии, в котором каждый механизм CL1, CL2 муфты расцепляется.
[0048] Каждый из режимов движения устанавливается посредством управления первым механизмом CL1 муфты, вторым механизмом CL2 муфты, первым тормозным механизмом B1, двигателем 5 и электромоторами 6, 7. Фиг. 4 показывает таблицу, указывающую один пример этих режимов движения и зацепленных и расцепленных состояний первого механизма CL1 муфты, второго механизма CL2 муфты и первого тормозного механизма B1, рабочих состояний первого электромотора 6 и второго электромотора 7 и присутствия или отсутствия вывода движущего крутящего момента из двигателя 5, в каждом режиме движения. В столбцах CL1, CL2 и CL3 на фиг. 4, черный круг указывает зацепленное состояние, и знак "минус" указывает расцепленное состояние. В столбцах MG1 и MG2 на фиг. 4, "G" означает то, что рассматриваемый электромотор-генератор работает главным образом в качестве генератора, и "M" означает то, что электромотор-генератор работает главным образом в качестве электромотора в то время, при этом пробел означает состояние, в котором электромотор-генератор не функционирует ни в качестве электромотора, ни в качестве генератора, либо первый электромотор 6 и второй электромотор 7 не участвую в приведении в действие. В столбце двигателя "ENG" на фиг. 4, "активирован" указывает состояние, в котором движущий крутящий момент доставляется из двигателя 5, и "деактивирован" указывает состояние, в котором движущий крутящий момент не доставляется из двигателя 5.
[0049] Фиг. 5-10 показывают номограммы, показывающие частоты вращения соответствующих вращающихся элементов механизма 8 деления мощности и направление крутящего момента каждого из двигателя 5 и электромоторов 6, 7, когда каждый режим движения устанавливается. На номограмме, прямые линии, указывающие соответствующие вращающиеся элементы механизма 8 деления мощности, рисуются параллельно друг с другом с интервалами, представляющими передаточные отношения, и расстояние от базовой линии, которая пересекается под прямым углом с этими прямыми линиями, представляет частоту вращения вращающегося элемента. На прямой линии, указывающей вращающийся элемент, направление крутящего момента указывается посредством стрелки, и абсолютная величина крутящего момента указывается посредством длины стрелки.
[0050] Как показано на фиг. 5 и фиг. 6, в HV-Hi-режиме и HV-Lo-режиме, движущий крутящий момент доставляется из двигателя 5, и любой из первого механизма CL1 муфты, и второго механизма CL2 муфты зацепляется в то время, когда крутящий момент за счет силы реакции доставляется из первого электромотора 6. В этом случае, частота вращения первого электромотора 6 управляется таким образом, чтобы оптимизировать эффективность (полученную посредством деления общей величины потребленной энергии топлива и электрической мощности на величину энергии передних колес 1R, 1L) первого модуля 2 привода в целом с учетом экономии топлива двигателя 5 и эффективности приведения в действие первого электромотора 6. Частота вращения первого электромотора 6 может непрерывно изменяться, и частота вращения двигателя определяется на основе частоты вращения первого электромотора 6 и скорости транспортного средства. Соответственно, механизм 8 деления мощности может функционировать в качестве бесступенчатой трансмиссии.
[0051] Когда первый электромотор 6 доставляет крутящий момент за счет силы реакции и в силу этого выступает в качестве генератора, как описано выше, часть мощности двигателя 5 преобразуется посредством первого электромотора 6 в электрическую энергию. Затем мощность, полученная посредством вычитания величины мощности, преобразованной посредством первого электромотора 6 в электрическую энергию, из мощности двигателя 5, передается в коронную шестерню 18 модуля 10 переключения частоты вращения. Крутящий момент за счет силы реакции, доставленный из первого электромотора 6, определяется согласно коэффициенту деления крутящего момента, передаваемого из двигателя 5 к первому электромотору 6 через механизм 8 деления мощности. Отношение крутящего момента, передаваемого из двигателя 5 в сторону первого электромотора 6 через механизм 8 деления мощности, к крутящему моменту, передаваемому в сторону коронной шестерни 18, а именно, коэффициент деления крутящего момента механизма 8 деления мощности, отличается между HV-Lo-режимом и HV-Hi-режимом.
[0052] Более конкретно, если крутящий момент, передаваемый в сторону первого электромотора 6, рассматривается как 1, коэффициент деления крутящего момента в качестве пропорции крутящего момента, передаваемого в сторону коронной шестерни 18 в HV-Lo-режиме, выражается как "1/(ρ1*ρ2)", и коэффициент деления крутящего момента в HV-Hi-режиме выражается как "1/ρ1". А именно, пропорция крутящего момента, передаваемого в коронную шестерню 18, относительно крутящего момента, доставленного из двигателя 5, выражается как "1/(1-(ρ1*ρ2)" в HV-Lo-режиме и выражается как "1/(ρ1+1)" в HV-Hi-режиме. Здесь, "ρ1" является передаточным отношением (отношением числа зубьев коронной шестерни 12 к числу зубьев солнечной шестерни 11) модуля 9 деления мощности, и "ρ2" является передаточным отношением (отношением числа зубьев коронной шестерни 18 к числу зубьев солнечной шестерни 17) модуля 10 переключения частоты вращения. В этой связи, ρ1 и ρ2 задаются равным значениям, меньшим 1. Соответственно, когда HV-Lo-режим задается, пропорция крутящего момента, передаваемого в коронную шестерню 18, превышает пропорция в случае, если HV-Hi-режим задается. Пропорция "1/(1-(ρ1*ρ2))" крутящего момента, передаваемого в коронную шестерню 18, относительно крутящего момента, доставленного из двигателя 5, когда HV-Lo-режим задается, представляет собой один пример "первого заданного значения" в этом варианте осуществления изобретения, и пропорция "1/(ρ1+1)" крутящего момента, передаваемого в коронную шестерню 18, относительно крутящего момента, доставленного из двигателя 5, когда HV-Hi-режим задается, представляет собой один пример "второго заданного значения" в этом варианте осуществления изобретения. Когда частота вращения двигателя 5 увеличивается посредством крутящего момента, сформированного в двигателе 5, крутящий момент, полученный посредством вычитания крутящего момента, требуемого для того, чтобы увеличивать частоту вращения двигателя 5, из крутящего момента, сформированного в двигателе 5, упоминается "как крутящий момент, доставленный из двигателя 5". А именно, крутящий момент, фактически доставленный из выходного вала 15 двигателя 5, упоминается как крутящий момент, доставленный из двигателя 5.
[0053] Затем электрическая мощность, вырабатываемая посредством первого электромотора 6, подается во второй электромотор 7. В этом случае, электрическая мощность, накопленная в устройстве 47 накопления мощности, также подается по мере необходимости во второй электромотор 7. Второй электромотор 7 и задний электромотор 30 функционируют с возможностью суммировать движущий крутящий момент с движущим крутящим моментом, передаваемым из двигателя 5 и второго электромотора 7, и задний электромотор 30 может рассматриваться идентичным образом, с точки зрения управления движущим крутящим моментом в транспортном средстве в целом. Таким образом, электрическая мощность может подаваться в задний электромотор 30 вместо второго электромотора 7 или в дополнение ко второму электромотору 7. В примере, описанном ниже, движущий крутящий момент, который должен суммироваться, доставляется только из второго электромотора 7.
[0054] В режиме прямого соединения, механизмы CL1, CL2 муфты зацепляются таким образом, что соответствующие вращающиеся элементы механизма 8 деления мощности вращаются на идентичной частоте вращения, как показано на фиг. 7. А именно, вся мощность двигателя 5 доставляется из механизма 8 деления мощности. Другими словами, ни одна часть мощности двигателя 5 не преобразуется в электрическую энергию посредством первого электромотора 6 или второго электромотора 7. Соответственно, потери не появляются вследствие электрического сопротивления, которое должно формироваться во время преобразования в электрическую энергию, и в силу этого может повышаться эффективность передачи мощности.
[0055] В EV-Lo-режиме и EV-Hi-режиме, как показано на фиг. 8 и фиг. 9, первый тормозной механизм B1 зацепляется, и движущий крутящий момент доставляется из электромоторов 6, 7, чтобы приводить в движение транспортное средство. Как показано на фиг. 8 и фиг. 9, отношение частоты вращения коронной шестерни 18 модуля 10 переключения к частоте вращения первого электромотора 6 меньше в EV-Lo-режиме, чем отношение в EV-Hi-режиме. А именно, степень уменьшения частоты вращения больше в EV-Lo-режиме, чем степень уменьшения в EV-Hi-режиме. Следовательно, большая движущая сила может получаться посредством задания EV-Lo-режима. В одиночном режиме, движущий крутящий момент доставляется только из второго электромотора 7, как показано на фиг. 10, и механизмы CL1, CL2 муфты расцепляются таким образом, что вращающиеся элементы механизма 8 деления мощности останавливаются. В силу этого можно уменьшать потери мощности, которые должны возникать вследствие пробуксовки двигателя 5 и первого электромотора 6.
[0056] Каждый из вышеуказанных режимов движения определяется на основе оставшейся величины заряда (SOC) устройства 47 накопления мощности, скорости транспортного средства, требуемой движущей силы и т.д. В этом варианте осуществления, режим поддержания заряда (CS), в котором каждый режим движения задается таким образом, чтобы поддерживать оставшуюся величину заряда устройства 47 накопления мощности, или режим истощения заряда (CD), в котором положительно используется электрическая мощность, накопленная в устройстве 47 накопления мощности, выбирается согласно оставшейся величине заряда устройства 47 накопления мощности. Более конкретно, CS-режим выбирается, когда оставшаяся величина заряда устройства 47 накопления мощности уменьшается, и CD-режим выбирается, когда оставшаяся величина заряда устройства 47 накопления мощности является относительно большой.
[0057] Фиг. 11 показывает один пример карты для определения каждого режима движения, когда выбирается CS-режим. На этой карте, горизонтальная ось указывает скорость транспортного средства, и вертикальная ось указывает требуемую движущую силу. Скорость транспортного средства может получаться из данных, определенных посредством датчика скорости транспортного средства, и требуемая движущая сила может получаться из данных, определенных посредством датчика позиции акселератора.
[0058] В примере, показанном на фиг. 11, когда транспортное средство движется задним ходом, одиночный режим задается, независимо от абсолютной величины требуемой движущей силы. Одиночный режим также задается, когда транспортное средство движется передним ходом, и требуемая движущая сила является относительно небольшой (что включает в себя случай, в котором скорость транспортного средства должна уменьшаться). Область, в которой задается одиночный режим, определяется на основе характеристик второго электромотора 7 и заднего электромотора 30. На фиг. 11, область, в которой задается одиночный режим, штрихуется.
[0059] Когда транспортное средство движется передним ходом, и требуемая движущая сила является относительно большой, HV-режим движения задается. В HV-режиме движения, движущая сила может формироваться от области низких скоростей транспортного средства до области высоких скоростей транспортного средства. Таким образом, когда оставшаяся величина заряда устройства 47 накопления мощности приближается к нижнему предельному значению, например, HV-режим движения может задаваться, даже в области, в которой должен задаваться одиночный режим.
[0060] Когда HV-режим движения задается, один из HV-Lo-режима, HV-Hi-режима и режима прямого соединения выбирается, согласно скорости транспортного средства и требуемой движущей силе. Более конкретно, HV-Lo-режим выбирается, когда скорость транспортного средства является относительно низкой, или требуемая движущая сила является относительно большой, и HV-Hi-режим выбирается, когда скорость транспортного средства является относительно высокой, и требуемая движущая сила является относительно небольшой. Режим прямого соединения выбирается, когда транспортное средство находится в рабочем состоянии, соответствующем рабочей точке (значению на основе скорости транспортного средства и требуемой движущей силы) между областью, в которой задается HV-Lo-режим, и областью, в которой задается HV-Hi-режим.
[0061] Первый модуль 2 привода выполнен с возможностью переключаться между HV-Lo-режимом, режимом прямого соединения и HV-Hi-режимом, когда рабочая точка пересекает каждую линию, показанную на фиг. 11. Более конкретно, первый модуль 2 привода переключается из режима прямого соединения на HV-Lo-режим, когда рабочая точка пересекает линию, помеченную "Lo<-Fix" на фиг. 11, от правой стороны к левой стороне или от нижней стороны к верхней стороне. Первый модуль 2 привода переключается из HV-Lo-режима на режим прямого соединения, когда рабочая точка пересекает линию, помеченную "Lo->Fix" от левой стороны к правой стороне или от верхней стороны к нижней стороне. Аналогично, первый модуль 2 привода переключается из HV-Hi-режима на режим прямого соединения, когда рабочая точка пересекает линию, помеченную "Fix<-Hi" на фиг. 11 от правой стороны к левой стороне или от нижней стороны к верхней стороне. Первый модуль 2 привода переключается из режима прямого соединения на HV-Hi-режим, когда рабочая точка пересекает линию, помеченную "Fix->Hi", от левой стороны к правой стороне или от верхней стороны к нижней стороне.
[0062] Фиг. 12 показывает один пример карты для определения каждого режима движения, когда выбирается CD-режим. На этой карте, горизонтальная ось указывает скорость транспортного средства, и вертикальная ось указывает требуемую движущую силу. Скорость транспортного средства может получаться из данных, определенных посредством датчика скорости транспортного средства, и требуемая движущая сила может получаться из данных, определенных посредством датчика позиции акселератора.
[0063] В примере, показанном на фиг. 12, когда транспортное средство движется задним ходом, одиночный режим задается, независимо от абсолютной величины требуемой движущей силы. Одиночный режим также задается, когда транспортное средство движется передним ходом, и требуемая движущая сила меньше первой движущей силы F1 (что включает в себя случай, в котором скорость транспортного средства должна уменьшаться). Область, в которой задается одиночный режим, определяется на основе характеристик второго электромотора 7 и заднего электромотора 30. На фиг. 12, область, в которой задается одиночный режим, штрихуется.
[0064] Когда транспортное средство движется передним ходом, и требуемая движущая сила превышает первую движущую силу F1, сдвоенный режим задается. Дополнительно, HV-режим движения задается, когда скорость транспортного средства выше первой скорости V1 транспортного средства, либо когда скорость транспортного средства выше второй скорости V2 транспортного средства, и требуемая движущая сила превышает вторую движущую силу F2. В HV-режиме движения, движущая сила может формироваться от области низких скоростей транспортного средства до области высоких скоростей транспортного средства. Таким образом, когда оставшаяся величина заряда устройства 47 накопления мощности приближается к нижнему предельному значению, например, HV-режим движения может задаваться, даже в области, в который должен задаваться одиночный режим или сдвоенный режим.
[0065] Когда HV-режим движения задается, один из HV-Lo-режима, HV-Hi-режима и режима прямого соединения выбирается, согласно скорости транспортного средства и требуемой движущей силе. Более конкретно, HV-Lo-режим выбирается, когда скорость транспортного средства является относительно низкой, или требуемая движущая сила является относительно большой, и HV-Hi-режим выбирается, когда скорость транспортного средства является относительно высокой, и требуемая движущая сила является относительно небольшой. Режим прямого соединения выбирается, когда транспортное средство находится в состоянии движения, соответствующем рабочей точке (значению на основе скорости транспортного средства и требуемой движущей силы) между областью, в которой задается HV-Lo-режим, и областью, в которой задается HV-Hi-режим.
[0066] Первый модуль 2 привода выполнен с возможностью переключаться между HV-Lo-режимом, режимом прямого соединения и HV-Hi-режимом, когда рабочая точка пересекает каждую линию, показанную на фиг. 12. Более конкретно, первый модуль 2 привода переключается между режимом прямого соединения и HV-Lo-режимом, когда рабочая точка пересекает линию, помеченную "Lo<->Fix" на фиг. 12. Аналогично, первый модуль 2 привода переключается между HV-Hi-режимом и режимом прямого соединения, когда рабочая точка пересекает линию, помеченную "Fix<->Hi" на фиг. 12.
[0067] Области, в которых задаются режимы движения, показанные на фиг. 11 и фиг. 12, и линии, используемые для переключения режимов в состояниях, в которых HV-режим движения задается, могут быть выполнены с возможностью варьироваться согласно температуре каждого элемента, который составляет первый модуль 2 привода, температуре(ам) устройства 47 накопления мощности или модулей 44, 45, 46 управления мощностью либо оставшейся величине заряда устройства 47 накопления мощности.
[0068] В HV-Hi-режиме, первый механизм CL1 муфты расцепляется таким образом, что водило 14 модуля 9 деления мощности и водило 20 модуля 10 переключения частоты вращения могут вращаться относительно друг друга, как показано на фиг. 5; в силу этого разность между частотой вращения входного вала (например, частотой вращения водила 14 модуля 9 деления мощности) и частотой вращения выходного вала (например, частотой вращения водила 20 модуля 10 переключения частоты вращения) первого механизма CL1 муфты может становиться большой, в зависимости от скорости транспортного средства и частоты вращения двигателя 5. В этой ситуации, когда запрос на переключение из HV-Hi-режима на HV-Lo-режим выполняется, частота вращения двигателя 5 нормально изменяется посредством первого электромотора 6 таким образом, чтобы уменьшать разность между частотой вращения входного вала и частотой вращения выходного вала первого механизма CL1 муфты, и затем, первый механизм CL1 муфты зацепляется. А именно, режим прямого соединения временно задается. Затем, второй механизм CL2 муфты расцепляется.
[0069] Аналогично, в HV-Lo-режиме, второй механизм CL2 муфты расцепляется таким образом, что водило 20 и коронная шестерня 18 модуля 10 переключения частоты вращения могут вращаться относительно друг друга, как показано на фиг. 6; в силу этого разность между частотой вращения входного вала (например, частотой вращения водила 20 модуля 10 переключения частоты вращения) и частотой вращения выходного вала (например, частотой вращения коронной шестерни 18 модуля 10 переключения частоты вращения) второго механизма CL2 муфты может становиться большой, в зависимости от скорости транспортного средства и частоты вращения двигателя 5. В этой ситуации, когда запрос на переключение из HV-Lo-режима на HV-Hi-режим выполняется, частота вращения двигателя 5 нормально изменяется посредством первого электромотора 6 таким образом, чтобы уменьшать разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты, и затем, второй механизм CL2 муфты зацепляется. А именно, режим прямого соединения временно задается. Затем, первый механизм CL1 муфты расцепляется.
[0070] Между тем, когда переключение между HV-Hi-режимом и HV-Lo-режимом выполняется, может быть невозможным или нежелательным задавать режим прямого соединения, например, в зависимости от условий движения. Более конкретно, если режим прямого соединения задается, когда скорость транспортного средства является низкой, частота вращения двигателя 5 может уменьшаться вниз до частоты вращения, которая приводит к останову двигателя. Соответственно, когда скорость транспортного средства является низкой, может быть невозможным задавать режим прямого соединения при поддержании вращения двигателя 5. Когда водитель уменьшает рабочую величину нажатия педали акселератора, водитель предполагает, что частота вращения двигателя 5 должна уменьшаться. Наоборот, когда водитель увеличивает рабочую величину нажатия педали акселератора, водитель предполагает, что частота вращения двигателя 5 должна увеличиваться. Таким образом, если изменение частоты вращения двигателя 5, вызываемое посредством задания режима прямого соединения, отличается от изменения, предполагаемого водителем, либо если частота вращения двигателя остается неизменной вследствие временного задания режима прямого соединения, водитель может испытывать странное или некомфортное ощущение.
[0071] Следовательно, первый модуль 2 привода транспортного средства согласно этому варианту осуществления изобретения выполнен с возможностью переключаться между HV-Lo-режимом и HV-Hi-режимом без прохождения через режим прямого соединения. Один пример этого управления проиллюстрирован на фиг. 13. Пример управления, показанный на фиг. 13, выполняется посредством ECU 48, когда запрос на переключение из HV-Lo-режима на HV-Hi-режим выполняется в то время, когда транспортное средство движется на низкой скорости.
[0072] В примере, показанном на фиг. 13, первоначально, определяется то, активирован или нет f_moveok1 (этап S1). Флаг f_moveok1 активируется, когда скорость транспортного средства является такой, что частота вращения двигателя становится равной частоте вращения, которая приводит к останову двигателя, когда режим прямого соединения задается, и временное уменьшение движущей силы не возникает, когда переключение из HV-Lo-режима на HV-Hi-режим выполняется без задания режима прямого соединения. А именно, флаг f_moveok1 активируется, когда разрешается выполнять переключение из HV-Lo-режима на HV-Hi-режим без задания режима прямого соединения.
[0073] Фиг. 14 показывает один пример блок-схемы последовательности операций способа для задания флага f_moveok1. В примере, показанном на фиг. 14, первоначально, определяется то, активирован или нет f_moveok1 в настоящее время (этап S11). А именно, определяется то, возвращается или нет управление в состояние, в котором флаг f_moveok1 активирован, когда выполняется последний цикл блок-схемы последовательности операций способа, показанной на фиг. 14.
[0074] Когда флаг f_moveok1 в данный момент активирован, и положительное решение ("Да") получается на этапе S11, определяется то, представляет собой или нет режим движения, который в данный момент задан, HV-Hi-режим (этап S12). Определение на этапе S12 может выполняться, согласно состояниям механизмов CL1, CL2 муфты и состояниям двигателя 5 и электромоторов 6, 7.
[0075] Когда текущий заданный режим движения представляет собой HV-Hi-режим, и положительное решение ("Да") получается на этапе S12, флаг f_moveok1 деактивируется (этап S13), и управление возвращается. Наоборот, когда текущий заданный режим движения не представляет собой HV-Hi-режим, а именно, текущий заданный режим движения представляет собой HV-Lo-режим или режим прямого соединения, или EV-режим движения, и отрицательное решение ("Нет") получается на этапе S12, флаг f_moveok1 поддерживается активированным (этапе S14), и управление возвращается.
[0076] С другой стороны, когда флаг f_moveok1 в данный момент деактивирован, и отрицательное решение ("Нет") получается на этапе S11, определяется то, активированы или нет флаг f_Fok и флаг f_Vok1 (этап S15). Флаг f_Fok на этапе S15 активируется, когда можно выполнять переключение между HV-Lo-режимом и HV-Hi-режимом при удовлетворении требуемой движущей силе. Более конкретно, флаг f_Fok активируется, когда требуемая движущая сила может удовлетворяться только посредством движущего крутящего момента второго электромотора 7, в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом. Флаг f_Vok1 на этапе S15 активируется, когда скорость транспортного средства равна или меньше скорости, при которой частота вращения двигателя становится равной частоте вращения, которая приводит к останову двигателя, когда режим прямого соединения задается.
[0077] Фиг. 15 показывает один пример блок-схемы последовательности операций способа для задания флага f_Fok. В примере, показанном на фиг. 15, первоначально, определяется то, равна или меньше либо нет требуемая движущая сила F первой движущей силы a (этап S21). Первая движущая сила a задается равной движущей силе, которая может удовлетворяться только посредством движущего крутящего момента второго электромотора 7. С другой стороны, движущий крутящий момент (максимальный крутящий момент), который может доставляться из второго электромотора 7, варьируется в зависимости от температурного режима второго электромотора 7, температурного режима второго модуля 45 управления мощностью или SOC и температурного режима устройства 47 накопления мощности, например, а также номинального крутящего момента второго электромотора 7. Дополнительно, когда первый электромотор 6 функционирует в качестве электромотора в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом, электрическая мощность, полученная посредством вычитания электрической мощности, потребляемой посредством первого электромотора 6, из электрической мощности, которая может доставляться из устройства 47 накопления мощности, подается во второй электромотор 7 и движущий крутящий момент, который может доставляться из второго электромотора 7, определяется согласно такой подаваемой электрической мощности. Первая движущая сила a представляет собой один пример "заданной движущей силы" в этом варианте осуществления изобретения.
[0078] Фиг. 16 схематично показывает график для определения первой движущей силы a. На фиг. 16, горизонтальная ось указывает скорость транспортного средства, и вертикальная ось указывает движущую силу. На фиг. 16, сплошная тонкая линия указывает значения на основе номинального крутящего момента второго электромотора 7. А именно, сплошная тонкая линия указывает движущую силу в случае, если максимальный крутящий момент доставляется из второго электромотора 7. Крутящий момент, который может доставляться из второго электромотора 7, ограничивается, например, согласно температуре катушек во втором электромоторе 7 и температуре магнитов, предоставленных во втором электромоторе 7. В этом случае, движущая сила, соответствующая выходному крутящему моменту второго электромотора 7, варьируется к началу координат на фиг. 16. С другой стороны, электрическая мощность, которая может подаваться во второй электромотор 7, варьируется, например, согласно температурному режиму второго модуля 45 управления мощностью и устройства 47 накопления мощности. На фиг. 16, тонкая пунктирная линия указывает движущую силу, соответствующую крутящему моменту, который может доставляться из второго электромотора 7, когда электрическая мощность, подаваемая во второй электромотор 7, ограничивается. Соответственно, в состояниях, показанных на фиг. 16, движущая сила, соответствующая максимальному крутящему моменту, который может доставляться из второго электромотора 7, находится внутри области, заданной посредством тонкой пунктирной линии. Таким образом, первая движущая сила a задается равной движущей силе, полученной посредством вычитания фиксированного значения из движущей силы, соответствующей максимальному крутящему моменту, который может доставляться из второго электромотора 7 согласно существующим состояниям второго электромотора 7 и устройства 47 накопления мощности, например, как указано посредством сплошной жирной линии на фиг. 16.
[0079] Когда требуемая движущая сила равна или меньше первой движущей силы a, и положительное решение ("Да") получается на этапе S21, требуемая движущая сила может удовлетворяться только посредством движущего крутящего момента второго электромотора 7 в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом; в силу этого флаг f_Fok активируется (этап S22), и управление возвращается. Наоборот, когда требуемая движущая сила превышает первую движущую силу a, и отрицательное решение ("Нет") получается на этапе S21, определяется то, равна или выше либо нет требуемая движущая сила второй движущей силы b (этап S23). Этот этап S23 предоставляется для определения того, должен или нет деактивироваться флаг f_Fok. Соответственно, вторая движущая сила b задается равной значению, которое больше первой движущей силы a и меньше движущей силы, соответствующей максимальному крутящему моменту, который может доставляться из второго электромотора 7. На фиг. 16, толстая пунктирная линия указывает вторую движущую силу b.
[0080] Когда требуемая движущая сила равна или выше второй движущей силы b, и положительное решение ("Да") получается на этапе S23, флаг f_Fok деактивируется (этап S24), и управление возвращается. Наоборот, когда требуемая движущая сила меньше второй движущей силы b, и отрицательное решение ("Нет") получается на этапе S23, задание флага f_Fok поддерживается (этап S25), и управление возвращается. А именно, флаг f_Fok поддерживается в деактивированном состоянии в случае, если флаг f_Fok деактивирован, когда выполняется последний цикл этой процедуры, и флаг f_Fok поддерживается в активированном состоянии в случае, если флаг f_Fok активирован, когда выполняется последний цикл этой процедуры.
[0081] Фиг. 17 показывает один пример блок-схемы последовательности операций способа для задания флага f_Vok1. В примере, показанном на фиг. 17, первоначально, определяется то, равна или меньше либо нет скорость V транспортного средства первой скорости α транспортного средства (этап S31). Первая скорость α транспортного средства задается равной скорости транспортного средства, которая выше, на данное значение, скорости транспортного средства, которая приводит к останову двигателя, когда режим прямого соединения задается. В другом примере, первая скорость α транспортного средства задается таким образом, что частота вращения двигателя 5 становится равной или превышающей собственную частоту механизма 8 деления мощности, когда режим прямого соединения задается. Первая скорость α транспортного средства представляет собой один пример "первой заданной скорости транспортного средства" в этом варианте осуществления изобретения.
[0082] Когда скорость V транспортного средства равна или меньше первой скорости α транспортного средства, и положительное решение ("Да") получается на этапе S31, флаг f_Vok1 активируется (этап S32), и управление возвращается. Наоборот, когда скорость V транспортного средства выше первой скорости α транспортного средства, и отрицательное решение ("Нет") получается на этапе S31, определяется то, равна или выше либо нет скорость V транспортного средства второй скорости β транспортного средства (этап S33). Этот этап S33 предоставляется для определения того, деактивируется или нет флаг f_Vok1. Соответственно, вторая скорость β транспортного средства задается равной скорости транспортного средства, которая выше первой скорости α транспортного средства.
[0083] Когда скорость V транспортного средства равна или выше второй скорости β транспортного средства, и положительное решение ("Да") получается на этапе S33, флаг f_Vok1 деактивируется (этап S34), и управление возвращается. Наоборот, когда скорость V транспортного средства ниже второй скорости β транспортного средства, и отрицательное решение ("Нет") получается на этапе S33, задание флага f_Vok1 поддерживается (этап S35), и управление возвращается. А именно, флаг f_Vok1 поддерживается в деактивированном состоянии в случае, если флаг f_Vok1 деактивирован, когда выполняется последний цикл этой процедуры, и флаг f_Vok1 поддерживается в активированном состоянии в случае, если флаг f_Vok1 активирован, когда выполняется последний цикл этой процедуры.
[0084] Когда флаг f_Fok и флаг f_Vok1, заданные посредством выполнения блок-схем последовательности операций способа, проиллюстрированных на фиг. 15 и фиг. 17, активированы, имеется вероятность достижения останова двигателя, когда режим прямого соединения задается, и движущая сила не уменьшается в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом. Следовательно, предпочтительно выполнять переключение между HV-Lo-режимом и HV-Hi-режимом без задания режима прямого соединения. Соответственно, когда флаг f_Fok и флаг f_Vok1 активированы, и положительное решение ("Да") получается на этапе S15 по фиг. 14, флаг f_moveok1 активируется (этап S16), и управление возвращается. Наоборот, когда один из флага f_Fok и флага f_Vok1 деактивирован, и отрицательное решение ("Нет") получается на этапе S15, флаг f_moveok1 деактивируется (этап S17), и управление возвращается.
[0085] Когда флаг f_moveok1 деактивируется на основе блок-схемы последовательности операций способа, показанной на фиг. 14, и в силу этого отрицательное решение ("Нет") получается на этапе S1 по фиг. 13, транспортное средство поддерживается переведенным в режим движения, который в данный момент устанавливается (этап S2). Соответственно, когда каждый из механизмов CL1, CL2 муфты выполнен с возможностью зацепляться согласно регулируемой переменной, такой как гидравлическое давление или принимаемая электрическая мощность, регулируемая переменная поддерживается. Когда каждый из механизмов CL1, CL2 муфты представляет собой так называемый механизм муфты на основе нормального переключения, он, в частности, не принимает управляющий сигнал. Механизм муфты на основе нормального переключения представляет собой механизм муфты, выполненный с возможностью переключаться из зацепленного состояния в расцепленное состояние, когда он принимает управляющий сигнал для расцепляющего муфту механизма, и переключаться из расцепленного состояния в зацепленное состояние, когда он принимает управляющий сигнал для механизма зацепления муфты, при поддержании в текущем состоянии (зацепленном состоянии или расцепленном состоянии), когда он не принимает управляющий сигнал для расцепления и сигнал для зацепления.
[0086] С другой стороны, когда флаг f_moveok1 активирован, и положительное решение ("Да") получается на этапе S1, определяется то, имеется или нет запрос на переключение из HV-Lo-режима на HV-Hi-режим (этап S3). На этапе S3, можно определять то, изменен или нет режим движения, заданный на основе карт, показанных на фиг. 11 и фиг. 12, например, из HV-Lo-режима на HV-Hi-режим, либо то, ограничивается или нет задание HV-Lo-режима по различным причинам, и то, имеется или нет запрос на переключение на HV-Hi-режим, хотя транспортное средство находится в условиях движения, в которых HV-Lo-режим нормально задается.
[0087] Ниже кратко описывается одна из причин, по которым ограничивается задание HV-Lo-режима. В HV-режиме движения, транспортное средство движется с комбинацией крутящего момента, механически передаваемого из двигателя 5 в коронную шестерню 18, и крутящего момента второго электромотора 7. Между тем, верхняя предельная частота вращения двигателя 5 задается равной более низкой частоте вращения в HV-Lo-режиме, чем частота вращения в HV-Hi-режиме таким образом, чтобы предотвращать чрезмерное вращение сателлитных шестерней модуля 9 деления мощности. Как результат, крутящий момент и мощность, доставленные из двигателя 5, также меньше в HV-Lo-режиме, чем крутящий момент и мощность в HV-Hi-режиме. Тем не менее, коэффициент деления крутящего момента, распределенного в сторону коронной шестерни 18 посредством механизма 8 деления мощности, больше в HV-Lo-режиме, чем коэффициент в HV-Hi-режиме. Следовательно, крутящий момент, передаваемый из двигателя 5 в коронную шестерню 18, больше в HV-Lo-режиме, чем крутящий момент в HV-Hi-режиме. Как результат, когда идентичный крутящий момент может доставляться из второго электромотора 7, независимо от режима движения, большая движущая сила может получаться в HV-Lo-режиме, чем движущая сила в HV-Hi-режиме.
[0088] С другой стороны, крутящий момент, передаваемый в сторону первого электромотора 6, меньше в HV-Lo-режиме, чем крутящий момент в HV-Hi-режиме; в силу этого электрическая мощность, вырабатываемая посредством первого электромотора 6, может быть меньшей в HV-Lo-режиме. В этом случае, электрическая мощность, которая может подаваться из первого электромотора 6 во второй электромотор 7, меньше в HV-Lo-режиме, чем электрическая мощность в HV-Hi-режиме. Тем не менее, когда достаточная электрическая мощность может подаваться из устройства 47 накопления мощности во второй электромотор 7, движущий крутящий момент, который может доставляться из второго электромотора 7, не изменяется, поскольку он может доставляться из второго электромотора 7 независимо от электрической мощности, вырабатываемой посредством первого электромотора 6. С другой стороны, электрическая мощность, которая может доставляться из устройства 47 накопления мощности, ограничивается вследствие SOC и температуры устройства 47 накопления мощности, например, и в силу этого электрическая мощность, которая может подаваться из устройства 47 накопления мощности во второй электромотор 7, может уменьшаться. В этом случае, больший движущий крутящий момент может доставляться из второго электромотора 7 в HV-Hi-режиме, в котором больший электрическая мощность вырабатывается посредством первого электромотора 6. Таким образом, даже если крутящий момент, передаваемый из двигателя 5 в коронную шестерню 18, меньше в HV-Hi-режиме, чем крутящий момент в HV-Lo-режиме, как описано выше, полный движущий крутящий момент, который может передаваться на передние колеса 1R, 1L, может быть большим в HV-Hi-режиме. В этой ситуации, ограничивается задание HV-Lo-режима. А именно, когда электрическая мощность, которая может доставляться из устройства 47 накопления мощности, ограничивается в то время, когда транспортное средство движется в HV-Lo-режиме, запрос на переключение на HV-Hi-режим может выполняться, даже если режим движения на основе карт, показанных на фиг. 11 и фиг. 12, представляет собой HV-Lo-режим.
[0089] Когда имеется запрос на переключение из HV-Lo-режима на HV-Hi-режим, и положительное решение ("Да") получается на этапе S3, этап S4 и следующие этапы выполняются таким образом, чтобы выполнять переключение из HV-Lo-режима на HV-Hi-режим без прохождения через режим прямого соединения. Наоборот, когда текущий заданный режим движения не представляет собой HV-Lo-режим, либо когда отсутствует запрос на переключение из HV-Lo-режима на HV-Hi-режим, к примеру, когда имеется запрос на переключение из HV-Lo-режима на режим движения, отличный от HV-Hi-режима, или когда HV-Lo-режим поддерживается, и отрицательное решение ("Нет") получается на этапе S3, управление переходит к этапу S2, в котором текущий режим движения поддерживается, и управление возвращается.
[0090] На этапе S4, рабочий режим двигателя 5 переключается на режим холостого хода. В режиме холостого хода, двигатель 5 вращается сам по себе, и частота вращения двигателя 5 управляется до частоты вращения на холостом ходу, определенной таким образом, чтобы прогревать двигатель 5, например, идентично управлению двигателем, известному в данной области техники. В режиме холостого хода, открытие ISC-клапана 5d управляется способом с обратной связью, с использованием разности между частотой вращения на холостом ходу и фактической частотой вращения двигателя таким образом, что частота вращения двигателя становится равной частоте вращения на холостом ходу. Соответственно, открытие ISC-клапана 5d уменьшается, когда частота вращения двигателя выше частоты вращения на холостом ходу, и открытие ISC-клапана 5d увеличивается, когда частота вращения двигателя ниже частоты вращения на холостом ходу. Открытие электронного дроссельного клапана 5b, в дополнение или вместо ISC-клапана 5d, может управляться. Частота вращения на холостом ходу представляет собой один пример "первой (второй) заданной частоты вращения" в этом варианте осуществления изобретения.
[0091] В этом примере управления, переключение из HV-Lo-режима на HV-Hi-режим выполняется посредством, первоначально, расцепления первого механизма CL1 муфты, уменьшения разности между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты и затем зацепления второго механизма CL2 муфты. В этом случае, режим управления первого электромотора 6 является идентичным режиму управления HV-Lo-режима до того, как расцепляется первый механизм CL1 муфты, и переключается на управление синхронизацией для уменьшения разности между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты после того, как расцепляется первый механизм CL1 муфты. Таким образом, после выполнения этапа S4, определяется то, представляет собой текущий режим управления или нет HV-Lo-режим (этап S5). Определение на этапе S5 может выполняться на основе того, зацепляется или нет первый механизм CL1 муфты.
[0092] Когда текущий режим движения представляет собой HV-Lo-режим, и положительное решение ("Да") получается на этапе S5, целевая частота вращения первого электромотора 6 задается равной текущей частоте вращения, и выходной крутящий момент (Tg) первого электромотора 6 задается равным 0 (этап S6). Текущая частота вращения первого электромотора 6 может определяться посредством кругового датчика позиции (не показан). Управление на этапе S6 выполняется, когда первый механизм CL1 муфты представляет собой механизм муфты на основе ввода в зацепление; в силу этого выходной крутящий момент первого электромотора 6 задается равным 0 таким образом, чтобы уменьшать силу трения на зацепляющихся или сопряженных поверхностях. Соответственно, когда первый механизм CL1 муфты представляет собой механизм муфты фрикционного типа, этап S6 не может выполняться.
[0093] После того, как частота вращения и крутящий момент первого электромотора 6 управляются, как описано выше, управляющий сигнал для расцепления первого механизма CL1 муфты формируется, и управление возвращается без формирования управляющего сигнала для зацепления второго механизма CL2 муфты (этап S7). На этапе S7, требуется только расцеплять первый механизм CL1 муфты, при поддержании второго механизма CL2 муфты расцепленным. Здесь, поскольку каждый из механизмов CL1, CL2 муфты представляет собой механизм муфты на основе нормального переключения, указывается то, формируется либо нет управляющий сигнал для зацепления или управляющий сигнал для расцепления.
[0094] С другой стороны, когда текущий режим управления не представляет собой HV-Lo-режим, и отрицательное решение ("Нет") получается на этапе S5, а именно, когда режим управления переключен на управление синхронизацией, целевая частота вращения первого электромотора 6 задается равной частоте X1 вращения, при которой разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты становится равной "нулю", и выходной крутящий момент первого электромотора 6 задается равным крутящему моменту, определенному через PID-управление, с использованием разности между целевой частотой вращения и фактической частотой вращения (этап S8). А именно, крутящий момент первого электромотора 6 управляется таким образом, что частота вращения первого электромотора 6 соответствует целевой частоте вращения.
[0095] Целевая частота X1 вращения первого электромотора 6 может получаться из нижеприведенного уравнения (1) или уравнения (2). Уравнение (1) указывает взаимосвязь между частотой Ne вращения двигателя, частотой Np вращения коронной шестерни 18 модуля 10 переключения частоты вращения и частотой Ng вращения первого электромотора 6, когда HV-Hi-режим устанавливается, и уравнение (2) указывает взаимосвязь между частотой Ne вращения двигателя, частотой Np вращения коронной шестерни 18 модуля 10 переключения частоты вращения и частотой Ng вращения первого электромотора 6, когда HV-Lo-режим устанавливается. Соответственно, на этапе S8, частота вращения на холостом ходу подставляется вместо Ne в уравнение (1), и частота вращения коронной шестерни 18, соответствующей текущей скорости транспортного средства, подставляется вместо Np таким образом, что может получаться целевая частота X1 вращения первого электромотора 6.
Ne=(1/(1+ρ1))Np+(ρ1/(1+ρ1))Ng (1)
Ne=(1/(1-ρ1*ρ2))Np-(ρ1*ρ2)/(1-ρ1*ρ2))Ng (2)
[0096] Затем определяется то, находится или нет целевая частота X1 вращения в пределах допустимого диапазона целевой частоты X1 вращения (этап S9). Допустимый диапазон может определяться на основе количества тепла, сформированного вследствие скольжения, когда каждый из механизмов CL1, CL2 муфты представляет собой механизм муфты фрикционного типа, и может определяться на основе формы зацепления или сопряжения зубьев, когда он представляет собой механизм муфты на основе ввода в зацепление. А именно, на этапе S9 определяется то, равна или меньше либо нет разность между частотой вращения входного вала и частотой вращения выходного вала механизма муфты, который должен зацепляться, допустимого значения. Соответственно, частота вращения входного вала и частота вращения выходного вала механизма муфты, который должен зацепляться, соответственно, могут определяться вместо частоты вращения первого электромотора 6, и может определяться то, равна или меньше либо нет разность между этими частотами вращения допустимого значения. В случае если каждый механизм CL1, CL2 муфты представляет собой механизм муфты на основе ввода в зацепление, только относительное вращение в одном направлении может разрешаться, в зависимости от формы зацепляющих зубов. В этом случае, допустимый диапазон на этапе S9 может определяться в одном направлении.
[0097] Когда частота вращения первого электромотора 6 не находится в пределах допустимого диапазона целевой частоты вращения, и отрицательное решение ("Нет") получается на этапе S9, управление возвращается к этапу S8. Наоборот, когда частота вращения первого электромотора 6 находится в пределах допустимого диапазона целевой частоты вращения, и положительное решение ("Да") получается на этапе S9, управляющий сигнал для расцепления первого механизма CL1 муфты поддерживается деактивированным, и управляющий сигнал для зацепления второго механизма CL2 муфты активируется (этап S10). После этого управление возвращается. А именно, HV-Hi-режим устанавливается, посредством зацепления второго механизма CL2 муфты, при поддержании первого механизма CL1 муфты в расцепленном состоянии.
[0098] Фиг. 18 показывает один пример изменений режима управления и т.д. в случае, если первый модуль 2 привода переключается из HV-Lo-режима на HV-Hi-режим без прохождения через режим прямого соединения. В примере, показанном на фиг. 18, запрос на прогрев двигателя 5 выполняется все время. Во время t0, показанное на фиг. 18, HV-Lo-режим устанавливается, и в силу этого двигатель 5 и первый электромотор 6 вращаются. Относительно направлений вращения на фиг. 18, направление вращения двигателя 5 указывается в качестве "положительного". Кроме того, требуемый движущий крутящий момент доставляется из двигателя 5, и реактивный крутящий момент доставляется из первого электромотора 6. Относительно направления крутящего момента на фиг. 18, направление крутящего момента в направлении, в котором частота вращения двигателя 5 увеличивается, указывается в качестве "положительного". Относительно первого электромотора 6, направление крутящего момента в направлении, в котором частота вращения первого электромотора 6 увеличивается, когда первый электромотор 6 вращается в направлении, идентичном направлению двигателя 5, указывается в качестве "положительного", и направление крутящего момента в направлении, в котором частота вращения первого электромотора 6 уменьшается, когда первый электромотор 6 вращается в направлении, противоположном двигателю 5, указывается в качестве "положительного".
[0099] Во время t1, HV-Lo-режим ограничивается, и переключение на HV-Hi-режим запрашивается. Как результат, флаг для ограничения HV-Lo-режима активируется. Кроме того, во время t1, требуемая движущая сила равна или выше первой движущей силы a, и скорость транспортного средства равна или выше первой скорости α транспортного средства; в силу этого как флаг f_Fok, так и флаг f_Vok1 деактивированы. Следовательно, флаг f_moveok1 деактивирован. Как результат, отрицательное решение ("Нет") получается на этапе S1 по фиг. 13, и переключение из HV-Lo-режима на HV-Hi-режим не выполняется.
[0100] Во время t2, требуемая движущая сила начинает уменьшаться таким образом, что выходной крутящий момент двигателя 5 уменьшается, и реактивный крутящий момент первого электромотора 6 уменьшается, соответственно. Как результат, движущая сила уменьшается, и в силу этого скорость транспортного средства начинает уменьшаться. Затем во время t3, требуемая движущая сила становится равной или меньшей первой движущей силы a таким образом, что флаг f_Fok активируется. Во время t4, скорость транспортного средства становится равной или меньшей первой скорости α транспортного средства таким образом, что флаг f_Vok1 активируется, и флаг f_moveok1 также активируется. Как результат, положительное решение ("Да") получается на этапе S1 по фиг. 13. Поскольку имеется запрос на переключение из HV-Lo-режима на HV-Hi-режим в примере, проиллюстрированном на фиг. 18, положительное решение ("Да") получается на этапе S2 по фиг. 13.
[0101] Соответственно, двигатель 5 переключается на управление оборотами на холостом ходу, и первый электромотор 6 управляется таким образом, что разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты уменьшается. А именно, частота вращения первого электромотора 6 управляется таким образом, что частота вращения водила 20 становится равной частоте вращения коронной шестерни 18, соответствующей скорости транспортного средства, и выходной крутящий момент первого электромотора 6 управляется до 0. Во время t4, управляющий сигнал для расцепления первого механизма CL1 муфты активируется таким образом, что первый механизм CL1 муфты начинает расцепляться.
[0102] Когда первый механизм CL1 муфты расцепляется во время t5, режим управления переключается на управление синхронизацией (режим синхронизации). Как результат, целевая частота вращения первого электромотора 6 задается равной частоте вращения, при которой разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты становится равной 0, и выходной крутящий момент первого электромотора 6 управляется, на основе разности между целевой частотой X1 вращения и фактической частотой вращения. Соответственно, в примере, показанном на фиг. 18, частота вращения первого электромотора 6 постепенно увеличивается в положительном направлении, и выходной крутящий момент первого электромотора 6 временно увеличивается со времени t5.
[0103] После этого, когда частота вращения первого электромотора 6 попадает в пределы допустимого диапазона целевой частоты X1 вращения (во время t6), положительное решение ("Да") получается на этапе S9 по фиг. 13, и в силу этого управляющий сигнал для зацепления второго механизма CL2 муфты активируется. Затем второй механизм CL2 муфты зацепляется во время t7, и запрос на переключение из HV-Lo-режима на HV-Hi-режим исключается; в силу этого отрицательное решение ("Нет") получается на этапе S3 по фиг. 13. Как результат, двигатель 5 и первый электромотор 6 управляются таким образом, что транспортное средство движется в HV-Hi-режиме.
[0104] В примере, показанном на фиг. 18, после того, как HV-Hi-режим устанавливается, выходной крутящий момент двигателя 5 увеличивается, и реактивный крутящий момент первого электромотора 6 увеличивается таким образом, что движущая сила увеличивается, и транспортное средство ускоряется, соответственно. Затем во время t8, требуемая движущая сила становится равной или превышающей вторую движущую силу b таким образом, что флаг f_Fok деактивируется, и флаг f_moveok1 деактивируется. Кроме того, во время t9, скорость транспортного средства становится равной или превышающей вторую скорость β транспортного средства таким образом, что флаг f_Vok1 деактивируется.
[0105] Фиг. 19 показывает изменения частот вращения соответствующих вращающихся элементов механизма 8 деления мощности в переходный период переключения из HV-Lo-режима на HV-Hi-режим. Верхняя номограмма на фиг. 19 показывает состояние, в котором HV-Lo-режим устанавливается; в силу этого двигатель 5 и первый электромотор 6 управляются, идентично примеру, показанному на фиг. 6.
[0106] В этом состоянии, когда переключение из HV-Lo-режима на HV-Hi-режим начинается, двигатель 5 первоначально подвергнут управлению оборотами на холостом ходу, и выходной крутящий момент первого электромотора 6 управляется до 0. Соответственно, частота вращения двигателя 5 уменьшается вниз до частоты вращения на холостом ходу, как показано на второй номограмме сверху на фиг. 19, и частота вращения первого электромотора 6 уменьшается, соответственно.
[0107] Затем первый механизм CL1 муфты расцепляется таким образом, что водило 14 и водило 20 могут вращаться относительно друг друга. Следовательно, частоты вращения двигателя 5 и первого электромотора 6 могут варьироваться, независимо от скорости транспортного средства. Как результат, на второй номограмме снизу на фиг. 19, частота вращения коронной шестерни 12 варьируется, согласно частоте вращения первого электромотора 6, частоте вращения двигателя 5 и отношению числа зубьев солнечной шестерни 11 и числа зубьев коронной шестерни 12 в модуле 9 деления мощности. Поскольку частота вращения двигателя 5 задается равной частоте вращения на холостом ходу, как описано выше, можно задавать частоту вращения коронной шестерни 12 равной частоте вращения коронной шестерни 18 посредством управления частотой вращения первого электромотора 6. Другими словами, водило 20 в качестве вращающегося элемента на стороне входного вала второго механизма CL2 муфты может вращаться на частоте вращения, идентичной частоте вращения коронной шестерни 18 в качестве вращающегося элемента на стороне выходного вала. Следовательно, на второй номограмме снизу на фиг. 19, частота вращения первого электромотора 6 управляется к целевой частоте вращения в то время, когда первый электромотор 6 и двигатель 5 вращаются в идентичном направлении вращения.
[0108] Затем в момент времени, в который частоты вращения соответствующих вращающихся элементов в модуле 10 переключения частоты вращения становятся равными, как показано на номограмме низа на фиг. 19, второй механизм CL2 муфты зацепляется таким образом, что HV-Hi-режим устанавливается.
[0109] Посредством переключения первого модуля 2 привода между HV-Lo-режимом и HV-Hi-режимом без прохождения через режим прямого соединения, в то время, когда транспортное средство движется на низкой скорости транспортного средства, как описано выше, может обеспечиваться то, что частота вращения двигателя с меньшей вероятностью или с очень небольшой вероятностью должна чрезмерно уменьшаться. Как результат, возможность достижения останова двигателя может уменьшаться. Собственная частота механизма 8 деления мощности и т.д. является относительно низкой частотой вследствие его конструкции; в силу этого можно обеспечивать то, что частота вращения двигателя с меньшей вероятностью или с очень небольшой вероятностью должна совпадать с собственной частотой механизма 8 деления мощности и т.д., посредством ограничения уменьшения частоты вращения двигателя. Как результат, шум с меньшей вероятностью или с очень небольшой вероятностью должен возникать вследствие увеличения вибрации механизма 8 деления мощности и т.д. Дополнительно, даже в ситуации, в которой двигатель 5 не может быть остановлен, к примеру, когда прогрев двигателя 5 запрашивается, или в ситуации, в которой рабочая точка двигателя 5 не может существенно изменяться, переключение между HV-Lo-режимом и HV-Hi-режимом может выполняться. Дополнительно, переключение между HV-Lo-режимом и HV-Hi-режимом выполняется, когда требуемая движущая сила является низкой таким образом, что величина движущей силы, уменьшенной в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом, может доставляться из второго электромотора 7. Как результат, уменьшение движущей силы и возникновение толчка могут ограничиваться, и водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение. Механизм муфты зацепляется, после того, как разность между частотой вращения входного вала и частотой вращения выходного вала механизма муфты, который должен зацепляться, уменьшается посредством первого электромотора 6; в силу этого толчок, вызываемый посредством зацепления механизма муфты, может уменьшаться.
[0110] Далее описывается один пример управления для переключения из HV-Lo-режима на HV-Hi-режим, при управлении частотой вращения двигателя согласно операции нажатия педали акселератора водителем. Фиг. 20 является блок-схемой последовательности операций способа, иллюстрирующей один пример управления. В примере, показанном на фиг. 20, первоначально определяется то, активирован или нет флаг f_moveok2, который активируется, когда имеется запрос на то, чтобы изменять частоту вращения двигателя согласно операции нажатия педали акселератора (этап S41).
[0111] Фиг. 21 показывает один пример блок-схемы последовательности операций способа для задания флага f_moveok2. В примере, показанном на фиг. 21, первоначально определяется то, активирован или нет флаг f_moveok2 в данный момент (этапе S51). А именно, определяется то, возвращается или нет управление в состояние, в котором флаг f_moveok2 активирован, когда выполняется последний цикл блок-схемы последовательности операций способа, показанной на фиг. 21.
[0112] Когда флаг f_moveok2 в данный момент активирован, и положительное решение ("Да") получается на этапе S51, определяется то, представляет собой или нет режим движения, который в данный момент задан, HV-Hi-режим (этап S52). Определение на этапе S52 может выполняться согласно состояниям механизмов CL1, CL2 муфты и состояниям двигателя 5 и электромоторов 6, 7, аналогично этапу S12 по фиг. 14, как описано выше.
[0113] Когда режим движения, который в данный момент задан, представляет собой HV-Hi-режим, и положительное решение ("Да") получается на этапе S52, флаг f_moveok2 деактивируется (этап S53), и управление возвращается. Наоборот, когда режим движения, который в данный момент задан, не представляет собой HV-Hi-режим, а именно, когда текущий заданный режим движения представляет собой HV-Lo-режим или режим прямого соединения, или EV-режим движения, и отрицательное решение ("Нет") получается на этапе S52, флаг f_moveok2 поддерживается активированным (этап S54), и управление возвращается.
[0114] С другой стороны, когда флаг f_moveok2 в данный момент деактивирован, и отрицательное решение ("Нет") получается на этапе S51, определяется то, активированы или нет флаг f_Fok и флаг f_Vok2 (этап S55). Флаг f_Fok на этапе S55 является идентичным флагу f_Fok на этапе S15 по фиг. 14. Соответственно, флаг f_Fok переключается между активацией и деактивацией посредством выполнения процедуры блок-схемы последовательности операций способа, показанной на фиг. 15.
[0115] Между тем, когда транспортное средство движется на относительно высокой скорости, предпочтительно изменять частоту вращения двигателя в соответствии с операцией нажатия педали акселератора, когда переключение из HV-Hi-режима на HV-Lo-режим выполняется. Это обусловлено тем, что двигатель вращается на относительно высокой частоте вращения, когда транспортное средство движется на высокой скорости. С другой стороны, когда транспортное средство движется на низкой скорости, двигатель также вращается на низкой частоте вращения, и водитель не испытает странное или некомфортное ощущение, даже если величина изменения частоты вращения двигателя является небольшой, когда рабочая величина нажатия педали акселератора уменьшается.
[0116] В примере управления, показанном в данном документе, флаг f_Vok2 задается посредством выполнения процедуры блок-схемы последовательности операций способа, проиллюстрированной на фиг. 22. В примере, показанном на фиг. 22, первоначально определяется то, равна или выше либо нет скорость V транспортного средства третьей скорости γ транспортного средства (этап S61). Как описано выше, когда частота вращения первого электромотора 6 управляется таким образом, чтобы предоставлять высокую эффективность первого модуля 2 привода в целом, частота вращения двигателя увеличивается по мере того, как скорость транспортного средства становится выше. Скорость транспортного средства, при которой водитель должен испытывать странное или некомфортное ощущение, если частота вращения двигателя не изменяется в соответствии с рабочей величиной нажатия педали акселератора, когда частота вращения первого электромотора 6 управляется вышеуказанным способом, получается заранее посредством эксперимента и т.п., и такая полученная скорость транспортного средства задается в качестве третьей скорости γ транспортного средства. Третья скорость γ транспортного средства представляет собой один пример "второй заданной скорости транспортного средства" в этом варианте осуществления изобретения.
[0117] Когда скорость V транспортного средства равна или выше третьей скорости γ транспортного средства, и положительное решение ("Да") получается на этапе S61, флаг f_Vok2 активируется (этап S62), и управление возвращается. Наоборот, когда скорость V транспортного средства ниже третьей скорости γ транспортного средства, и отрицательное решение ("Нет") получается на этапе S61, определяется то, равна или меньше либо нет скорость V транспортного средства четвертой скорости δ транспортного средства (этап S63). Этот этап S63 предоставляется для определения того, должен или нет деактивироваться флаг f_Vok2. Соответственно, четвертая скорость δ транспортного средства задается равной скорости транспортного средства, которая ниже третьей скорости γ транспортного средства. В этой связи, третья скорость γ транспортного средства может быть выше или равной второй скорости β транспортного средства на фиг. 17. Аналогично, четвертая скорость δ транспортного средства может быть выше или равной первой скорости α транспортного средства на фиг. 17.
[0118] Когда скорость V транспортного средства равна или меньше четвертой скорости δ транспортного средства, и положительное решение ("Да") получается на этапе S63, флаг f_Vok2 деактивируется (этап S64), и управление возвращается. Наоборот, когда скорость V транспортного средства выше четвертой скорости δ транспортного средства, и отрицательное решение ("Нет") получается на этапе S63, задание флага f_Vok2 поддерживается (этап S65), и контроллер возвращается. А именно, флаг f_Vok2 поддерживается в деактивированном состоянии, если флаг f_Vok2 деактивирован, когда выполняется последний цикл этой процедуры, и флаг f_Vok2 поддерживается в активированном состоянии, если флаг f_Vok2 активирован, когда выполняется последний цикл этой процедуры.
[0119] Когда флаг f_Fok и флаг f_Vok2, заданные посредством выполнения процедур блок-схем последовательности операций способа, показанных на фиг. 15 и фиг. 22, активированы, водитель может испытывать странное или некомфортное ощущение, если частота вращения двигателя изменяется согласно операции нажатия педали акселератора, и движущая сила не уменьшается в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом. Следовательно, предпочтительно выполнять переключение между HV-Lo-режимом и HV-Hi-режимом без задания режима прямого соединения. Соответственно, когда флаг f_Fok и флаг f_Vok2 активированы, и положительное решение ("Да") получается на этапе S55 по фиг. 21, флаг f_moveok2 активируется (этап S56), и управление возвращается. Наоборот, когда один из флага f_Fok и флага f_Vok2 деактивирован, и отрицательное решение ("Нет") получается на этапе S55, флаг f_moveok2 деактивируется (этап S57), и управление возвращается.
[0120] Когда флаг f_moveok2 деактивируется на основе блок-схемы последовательности операций способа, показанной на фиг. 21, и отрицательное решение ("Нет") получается на этапе S41 по фиг. 20, режим движения, который в данный момент задан, поддерживается (этап S42). Этот этап S42 является идентичным этапу S2 по фиг. 13.
[0121] С другой стороны, когда флаг f_moveok2 активирован, и положительное решение ("Да") получается на этапе S41, определяется то, имеется или нет запрос на переключение из HV-Lo-режима на HV-Hi-режим (этап S43). Этот этап S43 является идентичным этапу S3 по фиг. 13.
[0122] Когда имеется запрос на переключение из HV-Lo-режима на HV-Hi-режим, и положительное решение ("Да") получается на этапе S43, этап S44 и следующие этапы выполняются таким образом, что первый модуль 2 привода переключается из HV-Lo-режима на HV-Hi-режим без прохождения через режим прямого соединения. Наоборот, когда текущий заданный режим движения не представляет собой HV-Lo-режим, либо когда отсутствует запрос на переключение из HV-Lo-режима на HV-Hi-режим, к примеру, когда имеется запрос на переключение из HV-Lo-режима на режим движения, отличный от HV-Hi-режима, или когда HV-Lo-режим поддерживается, и отрицательное решение ("Нет") получается на этапе S43, управление переходит к этапу, S42, а именно, поддерживает текущий режим движения и затем возвращается.
[0123] На этапе S44, рабочий режим двигателя переключается на режим холостого хода, и целевая частота вращения двигателя 5 во время холостого хода задается равной значению, полученному посредством суммирования заданной частоты ΔNe вращения с текущей частотой вращения двигателя. Заданная частота ΔNe вращения определяется согласно операции нажатия педали акселератора. А именно, целевая частота вращения двигателя 5 во время холостого хода определяется таким образом, что частота вращения двигателя изменяется согласно операции нажатия педали акселератора. На фиг. 23, показывающем карту, используемую для определения заданной частоты ΔNe вращения, горизонтальная ось указывает требуемую движущую силу F, и вертикальная ось указывает заданную частоту ΔNe вращения. Как показано на фиг. 23, заданная частота ΔNe вращения определяется таким образом, что она увеличивается по мере того, как требуемая движущая сила F больше. Когда требуемая движущая сила является отрицательным значением, а именно, когда запрос на замедление выполняется, заданная частота ΔNe вращения допускает отрицательное значение. Соответственно, когда рабочая величина нажатия педали акселератора является относительно небольшой, частота вращения двигателя постепенно уменьшается. Карта, показанная на фиг 23, может быть подготовлена заранее, например, посредством выполнения сенсорных тестов. Частота вращения двигателя может управляться посредством управления открытием ISC-клапана 5d или электронного дроссельного клапана 5b, аналогично этапу S4 по фиг. 13. Требуемая движущая сила F определяется все время, и заданная частота ΔNe вращения обновляется каждый раз, когда управляющая процедура выполняется. Заданная частота ΔNe вращения также может определяться на основе рабочей величины нажатия педали акселератора или мощности, которая должна вырабатываться посредством транспортного средства, вместо требуемой движущей силы. Целевая частота вращения, заданная на этапе S44, представляет собой один пример "первой (второй) заданной частоты вращения" в этом варианте осуществления изобретения.
[0124] В этом примере управления, переключение из HV-Lo-режима на HV-Hi-режим выполняется посредством первоначального расцепления первого механизма CL1 муфты, уменьшения разности между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты и затем зацепления второго механизма CL2 муфты. В этом случае, режим управления первого электромотора 6 является идентичным режиму управления HV-Lo-режима до того, как расцепляется первый механизм CL1 муфты, и переключается на управление синхронизацией для уменьшения разности между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты, после того, как расцепляется первый механизм CL1 муфты. Таким образом, после выполнения этапа S44, определяется то, представляет собой текущий режим управления или нет HV-Lo-режим (этап S45). Этот этап S45 является идентичным этапу S5 по фиг. 13.
[0125] Когда текущий режим движения представляет собой HV-Lo-режим, и положительное решение ("Да") получается на этапе S45, целевая частота вращения первого электромотора 6 задается равной текущей частоте вращения, и выходной крутящий момент (Tg) первого электромотора 6 задается равным 0 (этап S46). Затем управляющий сигнал для расцепления первого механизма CL1 муфты формируется, и управление возвращается, без формирования управляющего сигнала для зацепления второго механизма CL2 муфты (этап S47). Эти этап S46 и этап S47 являются идентичными этапу S6 и этапу S7 по фиг. 13, соответственно.
[0126] С другой стороны, когда текущий режим управления не представляет собой HV-Lo-режим, и отрицательное решение ("Нет") получается на этапе S45, а именно, когда режим управления переключен на управление синхронизацией, целевая частота вращения первого электромотора 6 задается равной частоте X1 вращения, при которой разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты становится равной 0, и выходной крутящий момент первого электромотора 6 задается равным крутящему моменту, определенному через PID-управление, с использованием разности между целевой частотой вращения и фактической частотой вращения (этап S48). А именно, крутящий момент первого электромотора 6 управляется таким образом, что частота вращения первого электромотора 6 соответствует целевой частоте вращения.
[0127] Целевая частота X1 вращения может получаться из вышеуказанного уравнения (1) или (2). Между тем, в этом примере управления, частота вращения двигателя изменяется согласно операции нажатия педали акселератора, как пояснено выше на этапе S44; в силу этого целевая частота X1 вращения первого электромотора 6 также изменяется согласно изменению частоты вращения двигателя. Целевая частота X1 вращения первого электромотора 6 также изменяется согласно изменению скорости транспортного средства. Таким образом, целевая частота X1 вращения, определенная на этапе S48, варьируется каждый раз, когда эта процедура выполняется.
[0128] Затем определяется то, попадает или нет частота вращения первого электромотора 6 в пределы допустимого диапазона целевой частоты X1 вращения (этап S49). Этот этап S49 является идентичным этапу S9 по фиг. 13. Допустимый диапазон может быть идентичным или аналогичным допустимому диапазону этапа S9 по фиг. 13.
[0129] Когда частота вращения первого электромотора 6 не находится в пределах допустимого диапазона целевой частоты вращения, и отрицательное решение ("Нет") получается на этапе S49, управление возвращается к этапу S48. Наоборот, когда частота вращения первого электромотора 6 находится в пределах допустимого диапазона целевой частоты вращения, и положительное решение ("Да") получается на этапе S49, управляющий сигнал для расцепления первого механизма CL1 муфты поддерживается деактивированным, и управляющий сигнал для зацепления второго механизма CL2 муфты активируется (этап S50). После этого управление возвращается. А именно, HV-Hi-режим устанавливается посредством зацепления второго механизма CL2 муфты при поддержании первого механизма CL1 муфты в расцепленном состоянии.
[0130] Фиг. 24 показывает один пример изменений режима управления и т.д. когда пример управления, показанный на фиг. 20, выполняется. В примере, показанном на фиг. 24, запрос на то, чтобы прогревать двигатель 5, выполняется все время. Во время t10, показанное на фиг. 24, HV-Lo-режим устанавливается, и в силу этого двигатель 5 и первый электромотор 6 вращаются. Относительно направления вращения на фиг. 24, направление вращения двигателя 5 указывается в качестве "положительного". Кроме того, требуемый движущий крутящий момент доставляется из двигателя 5, и реактивный крутящий момент доставляется из первого электромотора 6. Относительно направления крутящего момента на фиг. 24, направление крутящего момента в направлении, в котором частота вращения двигателя 5 увеличивается, указывается в качестве "положительного". Относительно первого электромотора 6, направление крутящего момента в направлении, в котором частота вращения первого электромотора 6 увеличивается, когда первый электромотор 6 вращается в направлении, идентичном направлению двигателя 5, указывается в качестве "положительного", и направление крутящего момента в направлении, в котором частота вращения первого электромотора 6 уменьшается, когда первый электромотор 6 вращается в направлении, противоположном двигателю 5, указывается в качестве "положительного".
[0131] Требуемая движущая сила начинает уменьшаться во время t11 таким образом, что выходной крутящий момент двигателя 5 уменьшается, и реактивный крутящий момент первого электромотора 6 уменьшается, соответственно. Как результат, движущая сила уменьшается, и в силу этого скорость транспортного средства начинает уменьшаться. Одновременно со временем t11 или в момент немного позднее времени t11, требуемая движущая сила становится равной или меньшей первой движущей силы a таким образом, что флаг f_Fok активируется. Во время t11, скорость транспортного средства выше третьей скорости γ транспортного средства; в силу этого флаг f_Vok2 активирован. Соответственно, во время t12 немного позднее времени t11, флаг f_moveok2 активируется. Как результат, положительное решение ("Да") получается на этапе S41 по фиг. 20. Кроме того, в этом примере, имеется запрос на переключение из HV-Lo-режима на HV-Hi-режим; в силу этого положительное решение ("Да") получается на этапе S43 по фиг. 20.
[0132] Соответственно, двигатель 5 переключается на управление оборотами на холостом ходу, и первый электромотор 6 управляется таким образом, чтобы уменьшать разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты. А именно, частота вращения первого электромотора 6 управляется таким образом, что частота вращения водила 20 становится равной частоте вращения коронной шестерни 18, соответствующей скорости транспортного средства, и выходной крутящий момент первого электромотора 6 управляется до 0. Дополнительно, во время t12, управляющий сигнал для расцепления первого механизма CL1 муфты активируется таким образом, что первый механизм CL1 муфты начинает расцепляться.
[0133] Во время t13, первый механизм CL1 муфты расцепляется, и режим управления переключается на управление синхронизацией (режим синхронизации). Как результат, целевая частота вращения первого электромотора 6 задается равной частоте вращения, при которой разность между частотой вращения входного вала и частотой вращения выходного вала второго механизма CL2 муфты становится равной 0, и выходной крутящий момент первого электромотора 6 управляется на основе разности между целевой частотой X1 вращения и фактической частотой вращения. Соответственно, в примере, показанном на фиг. 24, частота вращения первого электромотора 6 постепенно увеличивается в отрицательном направлении, и выходной крутящий момент первого электромотора 6 временно увеличивается в отрицательном направлении со времени t13.
[0134] Затем частота вращения первого электромотора 6 попадает в пределы допустимого диапазона целевой частоты X1 вращения (время t14) таким образом, что положительное решение ("Да") получается на этапе S49 по фиг. 20; в силу этого управляющий сигнал для зацепления второго механизма CL2 муфты активируется. Затем второй механизм CL2 муфты зацепляется во время t15, и запрос на переключение из HV-Lo-режима на HV-Hi-режим исключается; в силу этого отрицательное решение ("Нет") получается на этапе S43 по фиг. 20. Как результат, двигатель 5 и первый электромотор 6 управляются таким образом, что транспортное средство движется в HV-Hi-режиме.
[0135] В примере, показанном на фиг. 24, скорость транспортного средства поддерживается уменьшенной даже после того, как HV-Hi-режим устанавливается. Следовательно, скорость транспортного средства становится ниже четвертой скорости δ транспортного средства во время t16 таким образом, что флаг f_Vok2 деактивируется. Затем требуемая движущая сила начинает увеличиваться во время t17 и становится равной или превышающей вторую движущую силу b во время t18 таким образом, что флаг f_Fok деактивируется. Транспортное средство ускоряется со времени t18, и скорость транспортного средства становится равной или превышающей третью скорость γ транспортного средства во время t19 таким образом, что флаг f_Vok2 активируется.
[0136] Фиг. 25 показывает изменение частоты вращения вращающегося элемента механизма 8 деления мощности в переходный период переключения из HV-Lo-режима на HV-Hi-режим. Верхняя номограмма на фиг. 25 показывает состояние, в котором HV-Lo-режим устанавливается, и двигатель 5 и первый электромотор 6 управляются, идентично примеру, показанному на фиг. 6. Между тем, транспортное средство движется на высокой скорости таким образом, что частота вращения двигателя поддерживается равной относительно высокой частоте вращения.
[0137] Если переключение из HV-Lo-режима на HV-Hi-режим начинается в этом состоянии, двигатель 5 первоначально подвергнут управлению оборотами на холостом ходу, и выходной крутящий момент первого электромотора 6 управляется до 0. Соответственно, как показано на второй номограмме сверху на фиг. 25, частота вращения двигателя 5 уменьшается к частоте вращения на холостом ходу, и частота вращения первого электромотора 6 уменьшается, соответственно.
[0138] Затем первый механизм CL1 муфты расцепляется таким образом, что водило 14 и водило 20 могут вращаться относительно друг друга. Следовательно, частоты вращения двигателя 5 и первого электромотора 6 могут варьироваться, независимо от скорости транспортного средства. Как результат, частота вращения коронной шестерни 12 варьируется, согласно частоте вращения первого электромотора 6, частоте вращения двигателя 5 и отношению числа зубьев солнечной шестерни 11 и числа зубьев коронной шестерни 12 в модуле 9 деления мощности, как показано на второй номограмме снизу на фиг. 25. Как описано выше, частота вращения двигателя 5 управляется независимо от первого электромотора 6, например, посредством управления ISC-клапаном 5d. Следовательно, частота вращения коронной шестерни 12 может быть задаваться равной частоте вращения коронной шестерни 18 посредством управления частотой вращения первого электромотора 6. Другими словами, водило 20 в качестве вращающегося элемента на стороне входного вала второго механизма CL2 муфты и коронная шестерня 18 в качестве вращающегося элемента на стороне выходного вала могут вращаться на идентичной частоте вращения. Следовательно, на второй номограмме снизу на фиг. 25, направление вращения первого электромотора 6 является противоположному направлению вращения двигателя 5, и частота вращения первого электромотора 6 управляется к целевой частоте вращения.
[0139] Затем в то время, когда частоты вращения соответствующих вращающихся элементов в модуле 10 переключения частоты вращения становятся равными, как показано на нижней номограмме на фиг. 25, второй механизм CL2 муфты зацепляется таким образом, что HV-Hi-режим устанавливается.
[0140] Посредством выполнения переключения между HV-Lo-режимом и HV-Hi-режимом без прохождения через режим прямого соединения, как описано выше, можно изменять частоту вращения двигателя в соответствии с изменением операции нажатия педали акселератора (требуемой движущей силой). А именно, изменение частоты вращения двигателя, ожидаемое водителем, с меньшей вероятностью или с очень небольшой вероятностью должно отклоняться от изменения фактической частоты вращения двигателя. Как результат, первый модуль 2 привода может переключаться между HV-Lo-режимом и HV-Hi-режимом без вызывания у водителя странного или некомфортного ощущения. Кроме того, даже в ситуации, в которой двигатель 5 не может быть остановлен, к примеру, когда имеется запрос на то, чтобы прогревать двигатель 5, переключение между HV-Lo-режимом и HV-Hi-режимом может выполняться. Дополнительно, переключение между HV-Lo-режимом и HV-Hi-режимом выполняется в то время, когда требуемая движущая сила является небольшой; в силу этого величина движущей силы, уменьшенной в переходный период переключения между HV-Lo-режимом и HV-Hi-режимом, может доставляться из второго электромотора 7. Как результат, уменьшение движущей силы и возникновение толчка могут ограничиваться, и водитель с меньшей вероятностью или с очень небольшой вероятностью должен испытывать странное или некомфортное ощущение.
[0141] Это изобретение не ограничено вышеописанными вариантами осуществления и может изменяться по мере необходимости без отступления из цели изобретения. Более конкретно, изобретение может применяться к транспортному средству, которое включает в себя, по меньшей мере, два зацепляющих механизма и выполнено с возможностью задавать режим пониженной передачи посредством зацепления одного из зацепляющих механизмов, задавать режим повышенной передачи посредством зацепления другого зацепляющего механизма и задавать режим прямого соединения посредством зацепления обоих из зацепляющих механизмов. Ссылаясь на фиг. 26-31, ниже описываются другие конфигурации транспортного средства и рабочие состояния соответствующих вращающихся элементов, когда HV-Hi-режим и HV-Lo-режим задаются. На этих чертежах, идентичные ссылки с номерами назначаются компонентам, идентичным или соответствующим компонентам в примере, показанном на фиг. 1.
[0142] Фиг. 26 является принципиальной схемой, иллюстрирующей другую конфигурацию транспортного средства согласно одному варианту осуществления изобретения. Транспортное средство, показанное на фиг. 26, включает в себя первый дифференциальный механизм PL1, с которым непосредственно соединяется двигатель 5, и второй дифференциальный механизм PL2, с которым непосредственно соединяется первый электромотор 6.
[0143] Первый дифференциальный механизм PL1 имеет форму планетарного зубчатого механизма односателлитного типа, включающего в себя солнечную шестерню S1, соединенную с выходным валом 15 (или входным валом 16) двигателя 5, коронную шестерню R1, расположенную концентрически с солнечной шестерней S1, сателлитные шестерни P1, которые вводятся в зацепление с солнечной шестерней S1 и коронной шестерней R1, и водило C1, которое удерживает сателлитные шестерни P1 таким образом, что сателлитные шестерни P1 могут поворачиваться вокруг себя и вокруг оси первого дифференциального механизма PL1.
[0144] Второй дифференциальный механизм PL2 имеет форму планетарного зубчатого механизма односателлитного типа, включающего в себя солнечную шестерню S2, соединенную с первым электромотором 6, водило C2, соединенное с коронной шестерней R1 первого дифференциального механизма PL1, и коронную шестерню R2, соединенную с выходной шестерней 21. Аналогично примеру, показанному на фиг. 1, ведомая шестерня 23 соединяется с выходной шестерней 21 таким образом, что крутящий момент может передаваться на передние колеса 1R, 1L.
[0145] Транспортное средство, показанное на фиг. 26, дополнительно включает в себя четвертый механизм CL4 муфты, выполненный с возможностью зацеплять солнечную шестерню S1 с водилом C1 в первом дифференциальном механизме PL1 таким образом, что вращающиеся элементы, которые составляют первый дифференциальный механизм PL1, вращаются в качестве модуля, и пятый механизм CL5 муфты, выполненный с возможностью зацеплять водило C1 первого дифференциального механизма PL1 с коронной шестерней R2 второго дифференциального механизма PL2. Тормозной механизм B1 предоставляется на выходном валу 15 двигателя 5. Аналогично первому механизму CL1 муфты и второму механизму CL2 муфты, четвертый механизм CL4 муфты и пятый механизм CL5 муфты могут представлять собой механизмы муфты фрикционного типа или могут представлять собой механизмы муфты на основе ввода в зацепление.
[0146] Транспортное средство, как описано выше, может переводиться в HV-Hi-режим, в котором пропорция крутящего момента, передаваемого в коронную шестерню R2, является небольшой, посредством зацепления четвертого механизма CL4 муфты, и может переводиться в HV-Lo-режим, в котором пропорция крутящего момента, передаваемого в коронную шестерню R2, является большой посредством зацепления пятого механизма CL5 муфты.
[0147] Фиг. 27 является номограммой, иллюстрирующей рабочие состояния соответствующих вращающихся элементов, когда транспортное средство по фиг. 26 переводится в HV-Hi-режим. В HV-Hi-режиме, четвертый механизм CL4 муфты зацепляется, как описано выше. Соответственно, вращающиеся элементы, которые составляют первый дифференциальный механизм PL1, вращаются в качестве модуля. А именно, водило C2 второго дифференциального механизма PL2 вращается на частоте вращения, идентичной частоте вращения двигателя 5, и функционирует в качестве элемента входного вала. С реактивным крутящим моментом, передаваемым из первого электромотора 6 в солнечную шестерню S2 второго дифференциального механизма PL2, крутящий момент доставляется из коронной шестерни R2 второго дифференциального механизма PL2. А именно, солнечная шестерня S2 функционирует в качестве элемента силы реакции, и коронная шестерня R2 функционирует в качестве элемента выходного вала. В HV-Hi-режиме, когда крутящий момент, передаваемый в сторону первого электромотора 6, из крутящего момента, доставленного из двигателя 5, рассматривается как 1, пропорция крутящего момента, передаваемого в коронную шестерню R2, выражается как "1/ρ4". Здесь, отношение числа зубьев коронной шестерни R1 и числа зубьев солнечной шестерни S1 обозначается как "ρ3", и отношение числа зубьев коронной шестерни R2 и числа зубьев солнечной шестерни S2 обозначается как "ρ4".
[0148] Фиг. 28 показывает номограмму, иллюстрирующую рабочие состояния соответствующих вращающихся элементов, когда транспортное средство по фиг. 26 переводится в HV-Lo-режим. Как показано на фиг. 28, в HV-Lo-режиме, пятый механизм CL5 муфты зацепляется. Соответственно, водило C1 первого дифференциального механизма PL1 и коронная шестерня R2 второго дифференциального механизма PL2 вращаются в качестве модуля. Кроме того, коронная шестерня R1 первого дифференциального механизма PL1 соединяется с водилом C2 второго дифференциального механизма PL2, как описано выше. Соответственно, солнечная шестерня S1 первого дифференциального механизма PL1 функционирует в качестве элемента входного вала, и солнечная шестерня S2 второго дифференциального механизма PL2 функционирует в качестве элемента силы реакции, тогда как коронная шестерня R2 второго дифференциального механизма PL2 функционирует в качестве элемента выходного вала. Как результат, крутящий момент солнечной шестерни S1 первого дифференциального механизма PL1 передается в коронную шестерню R2 второго дифференциального механизма PL2. В HV-Lo-режиме, когда крутящий момент, передаваемый в сторону первого электромотора 6, из крутящего момента, доставленного из двигателя 5, рассматривается как 1, пропорция крутящего момента, передаваемого в коронную шестерню R2, выражается как "1+ρ3+(ρ3/ρ4)". А именно, в HV-Lo-режиме, пропорция крутящего момента, передаваемого из двигателя 5 в коронную шестерню R2, превышает пропорцию в HV-Hi-режиме.
[0149] Транспортное средство, показанное на фиг. 26, переводится в HV-Hi-режим, когда один из четвертого механизма CL4 муфты и пятого механизма CL5 муфты зацепляется, и переводится в HV-Lo-режим, когда другой зацепляется. Дополнительно, режим прямого соединения устанавливается, когда зацепляются оба из четвертого механизма CL4 муфты и пятого механизма CL5 муфты. Соответственно, аналогично транспортному средству, показанному на фиг 1, может быть предпочтительным переключать транспортное средство между HV-Hi-режимом и HV-Lo-режимом без прохождения через режим прямого соединения.
[0150] Фиг. 29 является принципиальной схемой, иллюстрирующей еще одну другую конфигурацию транспортного средства согласно одному варианту осуществления изобретения. Транспортное средство, показанное на фиг. 29, включает в себя третий дифференциальный механизм PL3, с которым непосредственно соединяется двигатель 5, и четвертый дифференциальный механизм PL4, с которым непосредственно соединяется первый электромотор 6.
[0151] Третий дифференциальный механизм PL3 имеет форму планетарного зубчатого механизма односателлитного типа, включающего в себя водило C3, соединенное с выходным валом 15 двигателя 5, солнечную шестерню S3 и коронную шестерню R3, соединенную с выходной шестерней 21. Аналогично примеру, показанному на фиг. 1, ведомая шестерня 23 соединяется с выходной шестерней 21 таким образом, что крутящий момент может передаваться на передние колеса 1R, 1L.
[0152] Четвертый дифференциальный механизм PL4 имеет форму планетарного зубчатого механизма односателлитного типа, включающего в себя коронную шестерню R4, соединенную с первым электромотором 6, водило C4, соединенное с солнечной шестерней S3 третьего дифференциального механизма PL3, и солнечную шестерню S4.
[0153] Транспортное средство, показанное на фиг. 29, дополнительно включает в себя шестой механизм CL6 муфты, выполненный с возможностью зацеплять водило C4 с коронной шестерней R4 в четвертом дифференциальном механизме PL4 таким образом, что вращающиеся элементы, которые составляют четвертый дифференциальный механизм PL4, вращаются в качестве модуля, и седьмой механизм CL7 муфты, выполненный с возможностью зацеплять водило C3 третьего дифференциального механизма PL3 с солнечной шестерней S4 четвертого дифференциального механизма PL4. Тормозной механизм B1 предоставляется на выходном валу 15 двигателя 5. Аналогично первому механизму CL1 муфты и второму механизму CL2 муфты, шестой механизм CL6 муфты и седьмой механизм CL7 муфты могут представлять собой механизмы муфты фрикционного типа или механизмы муфты на основе ввода в зацепление.
[0154] Транспортное средство, как описано выше, может переводиться в HV-Lo-режим, в котором пропорция крутящего момента, передаваемого в коронную шестерню R3, является большой, посредством зацепления седьмого механизма CL7 муфты, и может переводиться в HV-Hi-режим, в котором пропорция крутящего момента, передаваемого в коронную шестерню R3, является небольшой, посредством зацепления шестого механизма CL6 муфты.
[0155] Фиг. 30 является номограммой, иллюстрирующей рабочие состояния соответствующих вращающихся элементов, когда транспортное средство по фиг. 29 переводится в HV-Hi-режим. Как показано на фиг. 30, в HV-Hi-режиме, шестой механизм CL6 муфты зацепляется. Соответственно, вращающиеся элементы, которые составляют четвертый дифференциальный механизм PL4, вращаются в качестве модуля. А именно, крутящий момент первого электромотора 6 передается как есть в водило C4 четвертого дифференциального механизма PL4. Затем крутящий момент прикладывается из двигателя 5 к водилу C3 третьего дифференциального механизма PL3, и реактивный крутящий момент передается из первого электромотора 6 в солнечную шестерню S3 третьего дифференциального механизма PL3 через водило C4 четвертого дифференциального механизма PL4 таким образом, что крутящий момент доставляется из коронной шестерни R3 третьего дифференциального механизма PL3. А именно, водило C3 третьего дифференциального механизма PL3 функционирует в качестве элемента входного вала, и солнечная шестерня S3 функционирует в качестве элемента силы реакции, тогда как коронная шестерня R3 функционирует в качестве элемента выходного вала. В HV-Hi-режиме, когда крутящий момент, передаваемый в сторону первого электромотора 6, из крутящего момента, доставленного из двигателя 5, рассматривается как 1, пропорция крутящего момента, передаваемого в коронную шестерню R3, выражается как "1/ρ5". Здесь, "ρ5" обозначает отношение числа зубьев коронной шестерни R3 и числа зубьев солнечной шестерни S3.
[0156] Фиг. 31 показывает номограмму, иллюстрирующую рабочие состояния соответствующих вращающихся элементов, когда транспортное средство по фиг. 29 переводится в HV-Lo-режим. Как показано на фиг. 31, в HV-Lo-режиме, седьмой механизм CL7 муфты зацепляется. Соответственно, водило C3 третьего дифференциального механизма PL3 и солнечная шестерня S4 четвертого дифференциального механизма PL4 вращаются в качестве модуля. Кроме того, солнечная шестерня S3 третьего дифференциального механизма PL3 соединяется с водилом C4 четвертого дифференциального механизма PL4, как описано выше. Соответственно, водило C3 третьего дифференциального механизма PL3 функционирует в качестве элемента входного вала, и коронная шестерня R4 четвертого дифференциального механизма PL4 функционирует в качестве элемента силы реакции, тогда как коронная шестерня R3 третьего дифференциального механизма PL3 функционирует в качестве элемента выходного вала. Как результат, крутящий момент водила C3 третьего дифференциального механизма PL3 передается в коронную шестерню R3 третьего дифференциального механизма PL3. В HV-Lo-режиме, когда крутящий момент, передаваемый в сторону первого электромотора 6, из крутящего момента, доставленного из двигателя 5, рассматривается как 1, пропорция крутящего момента, передаваемого в коронную шестерню R3, выражается как" (1+ρ6)/ρ5)". Здесь, "ρ6" является отношением числа зубьев коронной шестерни R4 и числа зубьев солнечной шестерни S4. Соответственно, в HV-Lo-режиме, пропорция крутящего момента, передаваемого из двигателя 5 в коронную шестерню R3, превышает пропорцию в HV-Hi-режиме. Кроме того, степень уменьшения частоты вращения в качестве отношения частоты вращения двигателя к частоте вращения коронной шестерни R3 в случае, если частота вращения первого электромотора 6 равна 0, больше в HV-Lo-режиме, чем степень уменьшения в HV-Hi-режиме.
[0157] Транспортное средство, показанное на фиг. 29, переводится в HV-Hi-режим, когда один из шестого механизма CL6 муфты и седьмого механизма CL7 муфты зацепляется, и переводится в HV-Lo-режим, когда другой зацепляется. Дополнительно, режим прямого соединения устанавливается, когда зацепляются оба из шестого механизма CL6 муфты и седьмого механизма CL7 муфты. Соответственно, аналогично транспортному средству, показанному на фиг 1, может быть предпочтительным переключать транспортное средство между HV-Hi-режимом и HV-Lo-режимом без прохождения через режим прямого соединения.
[0158] Ниже всесторонне иллюстрируются конфигурации транспортных средств, показанных на фиг. 1, фиг. 26 и фиг. 29, следующим образом. А именно, транспортное средство включает в себя дифференциальный механизм, который состоит из первого дифференциального механизма, который имеет, по меньшей мере, три вращающихся элемента, включающих в себя первый вращающийся элемент, с которым соединяется двигатель, второй вращающийся элемент, с которым соединяется вращающаяся машина, и третий вращающийся элемент, с которым соединяются ведущие колеса, и выполняет работу в дифференциальном режиме с использованием первого вращающегося элемента в качестве одного из трех вращающихся элементов, второго вращающегося элемента в качестве другого из трех вращающихся элементов и третьего вращающегося элемента, и второго дифференциального механизма, который выполняет работу в дифференциальном режиме с использованием четвертого вращающегося элемента в качестве еще одного другого из трех вращающихся элементов, пятого вращающегося элемента, соединенного с третьим вращающимся элементом, и шестого вращающегося элемента, первого зацепляющего механизма, который соединяет шестой вращающийся элемент с первым вращающимся элементом или вторым вращающимся элементом или расцепляет соединение, и второго зацепляющего механизма, который соединяет, по меньшей мере, два вращающихся элемента из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента или, по меньшей мере, два вращающихся элементов из четвертого вращающегося элемента, пятого вращающегося элемента и шестого вращающегося элемента либо расцепляет соединение. Транспортное средство может задавать первый режим (HV-Lo-режим), в котором пропорция крутящего момента, передаваемого из двигателя на ведущие колеса, является относительно большой посредством зацепления одного из первого зацепляющего механизма и второго зацепляющего механизма, задавать второй режим (HV-Hi-режим), в котором пропорция крутящего момента, передаваемого из двигателя на ведущие колеса, является относительно небольшой, посредством зацепления другого из первого зацепляющего механизма и второго зацепляющего механизма и задавать режим прямого соединения посредством зацепления первого зацепляющего механизма и второго зацепляющего механизма. Транспортное средство с такой конфигурацией включено в транспортные средства согласно вариантам осуществления изобретения.
Реферат
Изобретение относится к транспортным средствам. Транспортное средство содержит двигатель, колеса, вращающуюся машину, трансмиссионный механизм с вращающимися элементами и зацепляющими механизмами и электронный модуль управления, задающий режим повышенной и пониженной передачи и режим прямого соединения. При понижении и повышении передачи происходит управление зацепляющими механизмами, двигателем и вращающейся машиной. Улучшается переключение передач. 2 н. и 16 з.п. ф-лы, 31 ил.
Формула
Документы, цитированные в отчёте о поиске
Гибридное транспортное средство
Приводная система гибридного транспортного средства
Комментарии