Устройство управления демпфированием для электрического транспортного средства - RU2657624C1
Код документа: RU2657624C1
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления демпфированием для электрического транспортного средства, имеющего мотор в качестве источника приведения в движение и устройство управления демпфированием, которое подавляет вибрацию приводной системы из источника приведения в движение на ведущие колеса.
Уровень техники
[0002] Традиционно, известно устройство управления демпфированием для электрического транспортного средства, которое комбинирует управление с обратной связью, которое подавляет вибрацию посредством фактических возмущений, и управление с прямой связью, которое подавляет вибрацию вследствие возмущений, которые предполагаются заранее (например, см. патентный документ 1).
Согласно этому предшествующему уровню техники, флуктуация в частоте вращения мотора, которая накладывает возмущения, корректируется по обратной связи относительно крутящего момента мотора, чтобы подавлять вибрацию.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2000-217209
Сущность изобретения
Задача, решаемая изобретением
[0004] Между тем, электрическое транспортное средство, содержащее трансмиссию, оснащенную выходным валом, соединенным с мотором, и ведущим валом, соединенным с ведущими колесами, причем они соединяются посредством ремня, имеет такую конфигурацию, в которой передаточное отношение является бесступенчатым; в силу этого возникают случаи, в которых возникает вибрация, сопровождающая изменения передаточного отношения.
Тем не менее, в предшествующем уровне техники, хотя известен демпфирующий крутящий момент, подавляющий вибрацию, сопровождающую переключение передач, средство для точного определения изменений передаточного отношения не предоставляется.
Следовательно, возникают случаи, в которых изменение передаточного отношения ошибочно определяется в предшествующем уровне техники, и возникает риск того, что управление демпфированием не работает точно.
[0005] С учетом вышеописанных проблем, задача настоящего изобретения заключается в том, чтобы предоставлять устройство управления демпфированием для электрического транспортного средства, которое допускает управление демпфированием, которое соответствует точному определению присутствия или отсутствия изменений передаточного отношения.
Средство решения задачи
[0006] Чтобы решить вышеописанную задачу, устройство управления демпфированием для электрического транспортного средства настоящего изобретения содержит:
- средство подавления вибрации при переключении передач, которое вычитает компенсационный крутящий момент для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента для подавления вибрации, вызываемой посредством возмущений частоты вращения мотора, чтобы управлять выходным крутящим моментом мотора. Помимо этого, устройство управления демпфированием в настоящем изобретении представляет собой устройство управления демпфированием для электрического транспортного средства, в котором средство подавления вибрации при переключении передач выполняет управление, когда абсолютное значение дифференциала второго порядка передаточного отношения равно или выше предварительно определенного значения.
Преимущества изобретения
[0007] В устройстве управления демпфированием для электрического транспортного средства согласно настоящему изобретению, можно точно определять переключение передач на основе дифференциала второго порядка передаточного отношения, с тем чтобы предотвращать ошибочное определение переключения передач. Следовательно, согласно настоящему изобретению, можно предотвращать ошибочное определение переключения передач, с тем чтобы точно осуществлять управление демпфированием относительно переключения передач.
Краткое описание чертежей
[0008] Фиг. 1 является общей принципиальной схемой, иллюстрирующей общую конфигурацию гибридного транспортного средства, содержащего устройство управления демпфированием для гибридных транспортных средств согласно первому варианту осуществления.
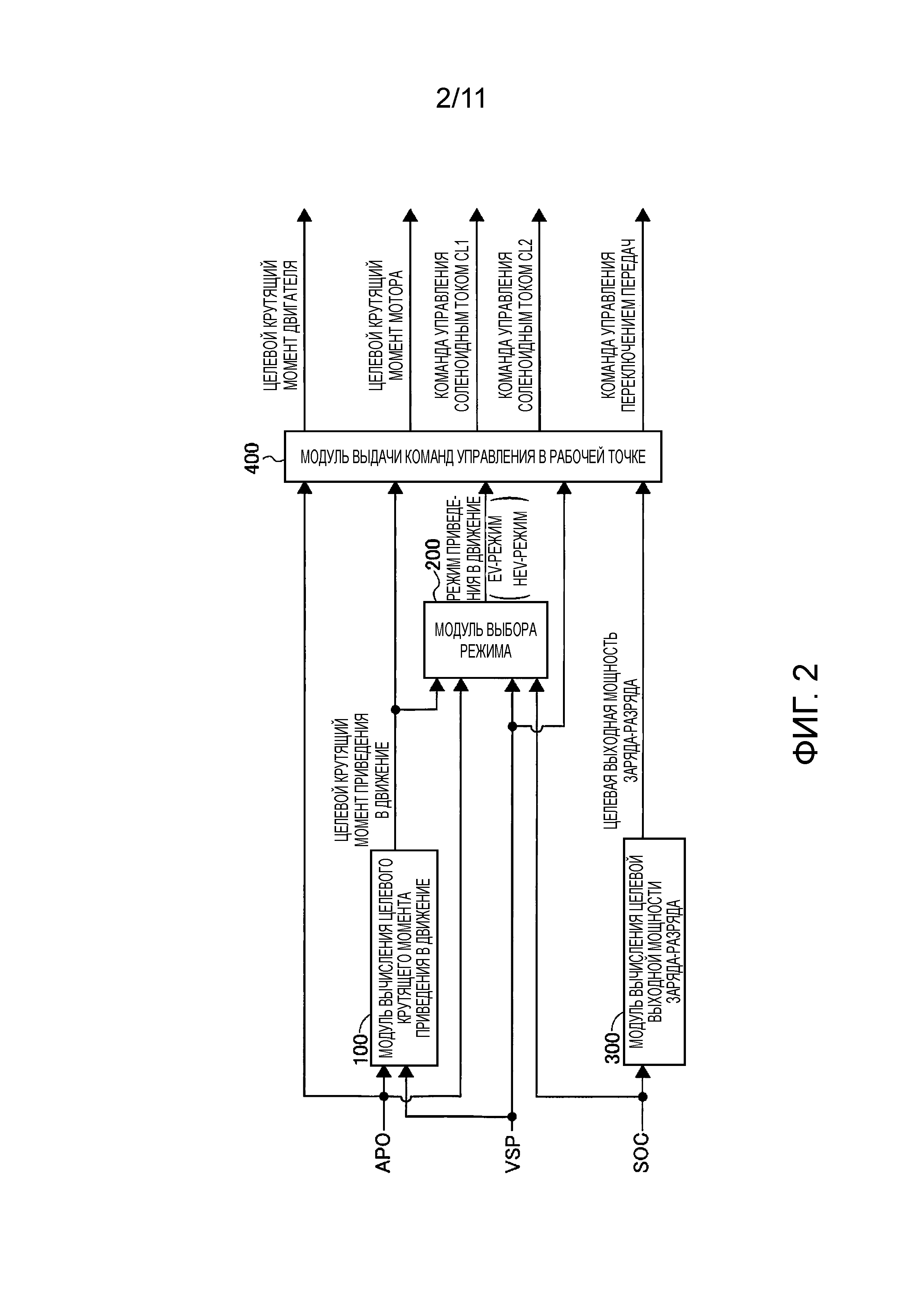
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию интегрального контроллера устройства управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
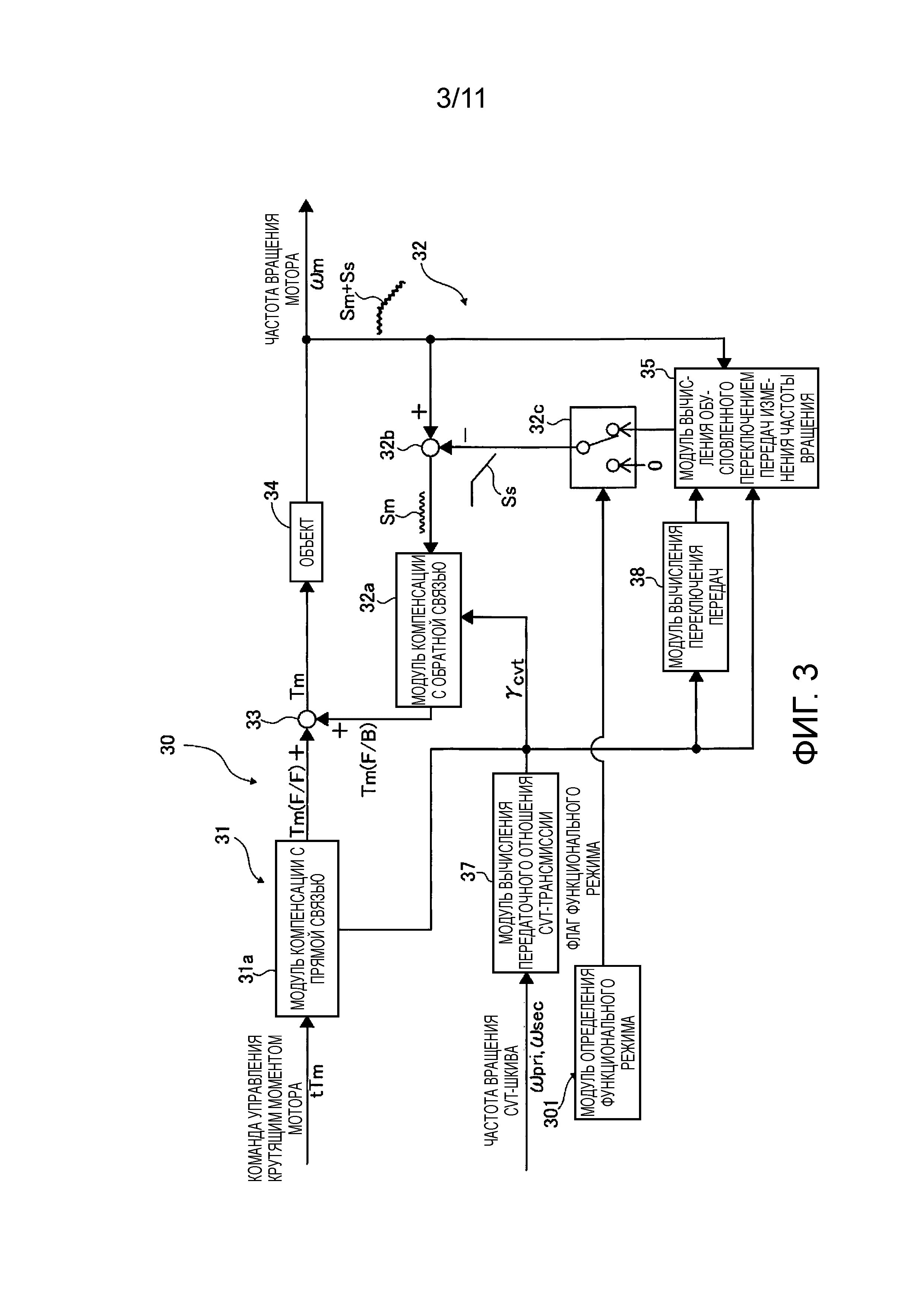
Фиг. 3 является блок-схемой, иллюстрирующей модуль вычисления крутящего момента мотора в устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса подавления вибрации устройства управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
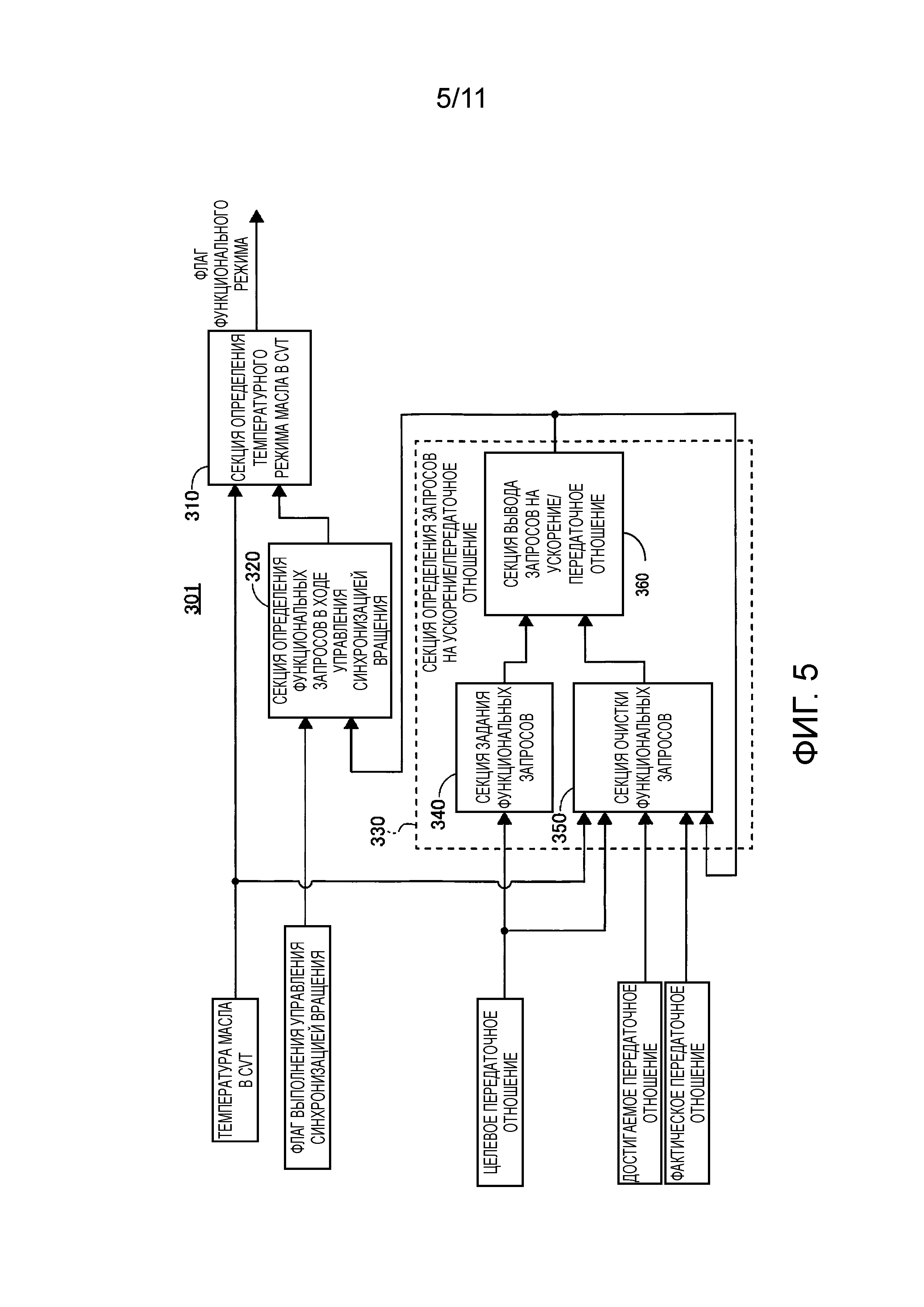
Фиг. 5 является блок-схемой, иллюстрирующей конфигурацию модуля определения функционального режима в устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
Фиг. 6 является блок-схемой, иллюстрирующей конфигурацию секции определения запросов на ускорение/передаточное отношение в устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
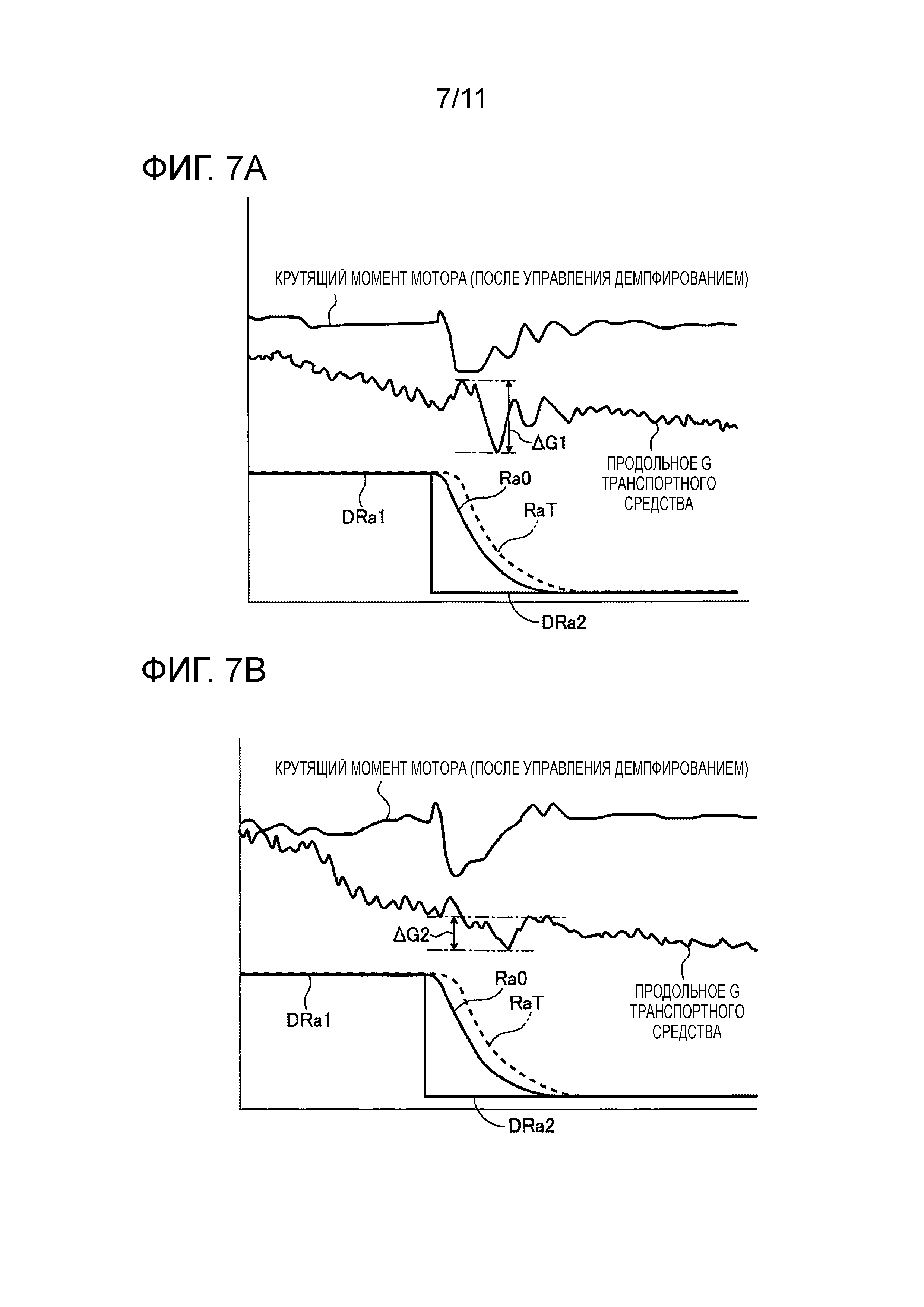
Фиг. 7A является временной диаграммой, иллюстрирующей пример работы в ходе ручного переключения "вверх" согласно сравнительному примеру, в котором компонент изменения частоты вращения, вызываемый посредством изменения передаточного отношения, не вычитается.
Фиг. 7B является временной диаграммой, иллюстрирующей пример работы в ходе ручного переключения "вверх" в настоящем варианте осуществления, в котором компонент изменения частоты вращения, вызываемый посредством изменения передаточного отношения, вычитается в устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
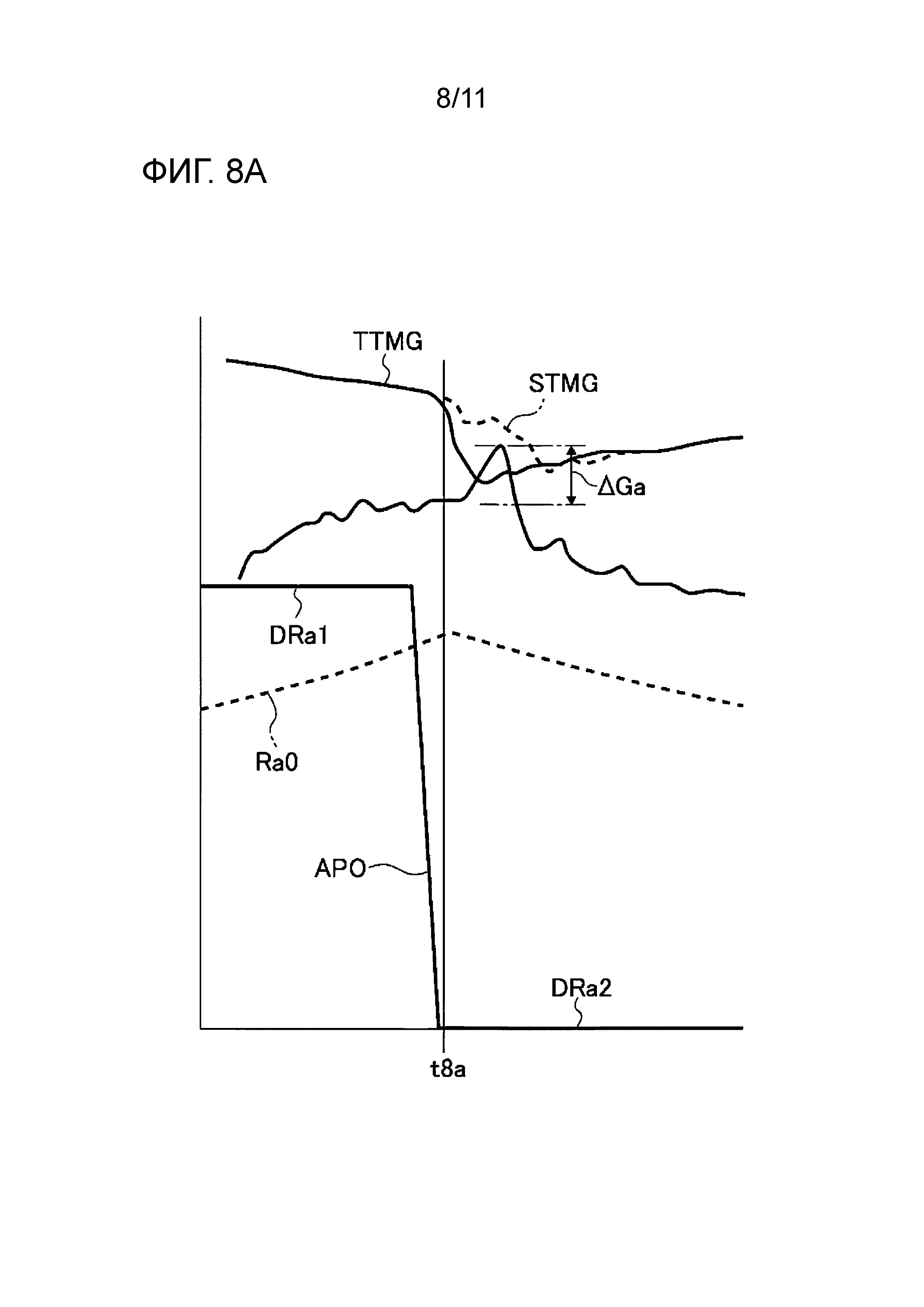
Фиг. 8A является временной диаграммой, иллюстрирующей работу согласно сравнительному примеру, в котором которую операция вычитания посредством модуля вычитания не выполняется при переключении передач с большим передаточным отношением/ускорением.
Фиг. 8B является временной диаграммой, иллюстрирующей пример работы, в котором операция вычитания посредством модуля вычитания выполняется при переключении передач с большим передаточным отношением/ускорением в устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
Фиг. 9A является временной диаграммой, иллюстрирующей изменения в целевом передаточном отношении (до переключения передач, после переключения передач), целевом передаточном отношении (значение команды управления) и фактическом передаточном отношении, в ходе работы по фиг. 8A и фиг. 8B.
Фиг. 9B является временной диаграммой, иллюстрирующей изменения в дифференциальном значении первого порядка целевого передаточного отношения (значения команды управления), проиллюстрированного на фиг. 9A.
Фиг. 9C является временной диаграммой, иллюстрирующей изменения в дифференциальном значении второго порядка целевого передаточного отношения (значения команды управления), проиллюстрированного на фиг. 9A.
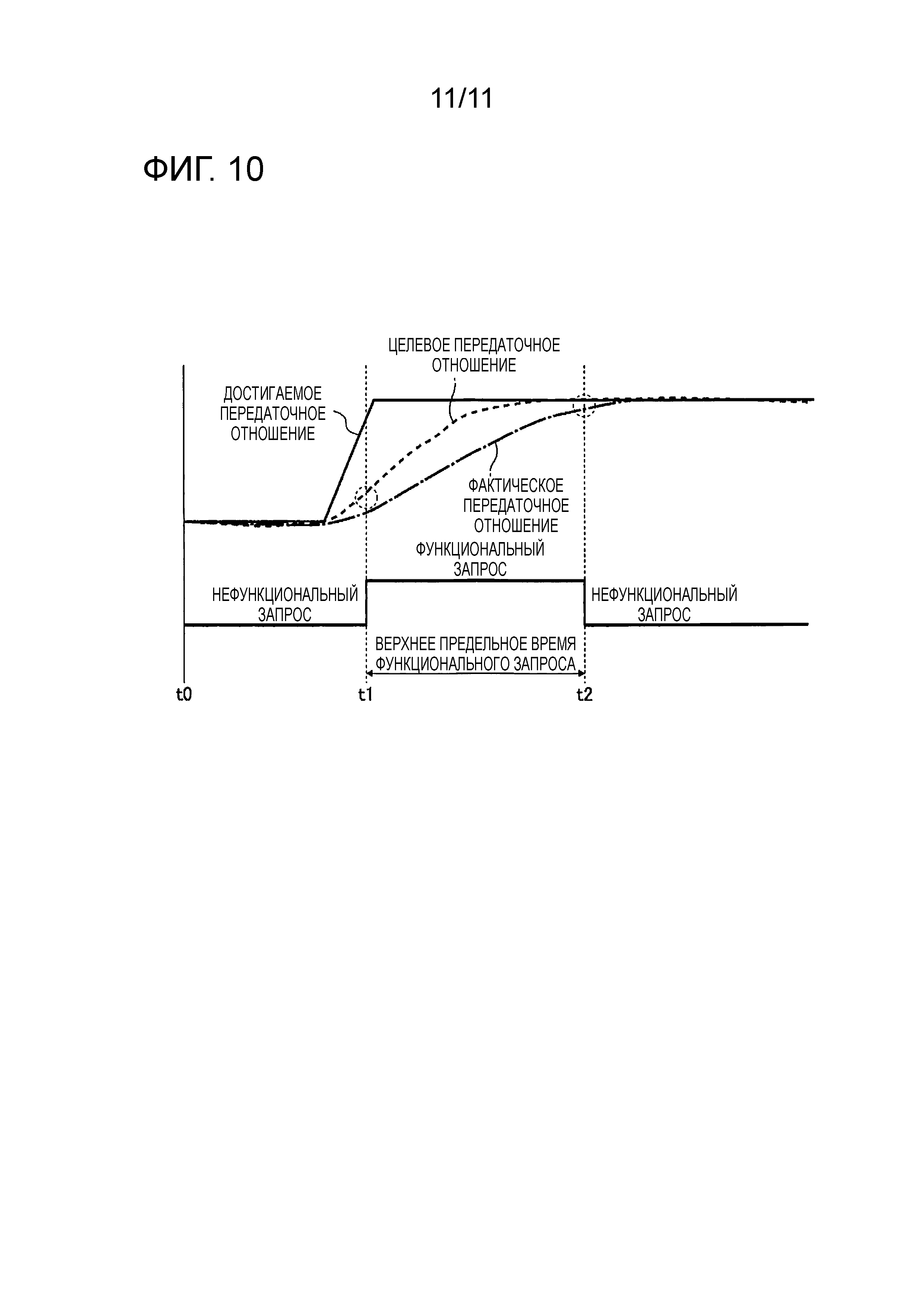
Фиг. 10 является временной диаграммой, иллюстрирующей взаимосвязь между функциональным запросом (заданием) и нефункциональным запросом (сбросом) в модуле определения функционального режима.
Подробное описание иллюстративных вариантов осуществления изобретения
[0009] Ниже описывается предпочтительный иллюстративный вариант осуществления для реализации устройства управления демпфированием для электрического транспортного средства настоящего изобретения на основе иллюстративных вариантов осуществления, показанных на чертежах.
Первый вариант осуществления
Во-первых, описывается конфигурация устройства управления демпфированием для электрического транспортного средства первого варианта осуществления.
Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления применяется к гибридному транспортному средству FF-типа (в дальнейшем называемому просто "гибридным транспортным средством"), имеющему левое и правое передние колеса в качестве ведущих колес и ременную бесступенчатую трансмиссию.
[0010] Ниже отдельно описываются "общая конфигурация системы гибридного транспортного средства", "система управления гибридного транспортного средства", "конфигурация управления посредством интегрального контроллера", "конфигурация управления демпфированием", "конфигурация определения функционального режима посредством модуля определения функционального режима" и "подробности конфигурации модуля определения функционального режима", относительно конфигурации устройства управления транспортного средства для гибридных транспортных средств согласно первому варианту осуществления.
[0011] Общая конфигурация системы гибридного транспортного средства
Фиг. 1 является общим системным видом гибридного транспортного средства, к которому применяется устройство управления демпфированием первого иллюстративного варианта осуществления. Ниже описывается общая конфигурация системы гибридного транспортного средства на основе фиг. 1.
[0012] Приводная система гибридного транспортного средства включает в себя двигатель Eng, первую муфту CL1, мотор-генератор MG (в дальнейшем называемый "мотором MG"), вторую муфту CL2 и бесступенчатую трансмиссию CVT.
[0013] Таким образом, приводная система гибридного транспортного средства имеет такую конфигурацию, в которой можно переключать выходные мощности двигателя Eng и мотора MG в качестве источников приведения в движение на предварительно определенное передаточное отношение посредством бесступенчатой трансмиссии CVT и передавать их на левое и правое передние колеса FL и FR в качестве ведущих колес.
[0014] Дополнительно, в приводной системе гибридного транспортного средства, первая муфта CL1, которая в состоянии соединять/разъединять приводную трансмиссию, предоставляется между двигателем Eng и мотором MG, и вторая муфта CL2, которая в состоянии соединять/разъединять приводную трансмиссию, предоставляется между мотором MG и бесступенчатой трансмиссией CVT. За счет этого можно формировать HEV-режим движения, в котором обе муфты CL1 и CL2 зацепляются, и движение выполняется посредством движущей силы двигателя Eng и мотора MG. Помимо этого, можно формировать EV-режим, в котором первая муфта CL1 расцепляется, а вторая муфта CL2 зацепляется, и движение выполняется посредством движущей силы только мотора MG.
[0015] Двигатель Eng допускает сгорание бедной смеси, и крутящий момент двигателя управляется таким образом, чтобы согласовываться со значением команды управления, посредством управления объемом всасываемого воздуха посредством актуатора дросселя, объемом впрыска топлива посредством инжектора и распределением зажигания посредством актуатора свечи зажигания.
[0016] Двигатель Eng может запускаться посредством проворачивания с помощью мотора MG в то время, когда первая муфта CL1 зацепляется с проскальзыванием. Помимо этого, может быть предусмотрена такая конфигурация, в которой можно начинать движение посредством стартерного мотора, который не показан, в низкотемпературном режиме или высокотемпературном режиме и т.д.
[0017] Первая муфта CL1 представляет собой фрикционный зацепляющий элемент, который размещается между двигателем Eng и мотором MG. Муфта, которая имеет возможность переключаться между полным зацеплением, частичным зацеплением и расцеплением посредством управления длиной хода на основе гидравлического давления первой муфты, подаваемого из схемы 110 управления гидравлическим давлением, описанной ниже, используется в качестве этой первой муфты CL1.
[0018] Мотор MG имеет конструкцию в форме синхронного мотора переменного тока, которая служит в качестве источника приведения в движение для обеспечения движения и выполняет управление крутящим моментом приведения в движение и управление частотой вращения при начале движения и движении, а также восстановление кинетической энергии транспортного средства, формируемой посредством управления рекуперативным торможением для аккумулятора BAT с высоким уровнем мощности при торможении и замедлении.
Инвертор INV преобразует постоянный ток в трехфазный переменный ток в ходе подачи мощности и преобразует трехфазный переменный ток в постоянный ток в ходе рекуперации, размещается между мотором MG и аккумулятором BAT с высоким уровнем мощности.
[0019] Вторая муфта CL2 представляет собой фрикционный зацепляющий элемент, размещенный между мотором MG и левым и правым передними колесами FL и FR, которые представляют собой ведущие колеса. Вторая муфта CL2 также управляется таким образом, что она находится в полном зацеплении или зацеплении с проскальзыванием, или расцеплении, посредством управления длиной хода согласно гидравлическому давлению второй муфты, которое подается из схемы 110 управления гидравлическим давлением.
[0020] Бесступенчатая трансмиссия CVT известна и содержит, хотя не показано, первичный шкив, вторичный шкив и ремень, намотанный вокруг обоих шкивов. Кроме того, бесступенчатая трансмиссия CVT представляет собой трансмиссию, которая достигает передаточного отношения бесступенчатой трансмиссии посредством изменения диаметров намотки шкивов посредством первичного давления и вторичного давления, подаваемых из схемы 110 управления гидравлическим давлением в первичную масляную камеру и вторичную масляную камеру.
[0021] Схема 110 управления гидравлическим давлением содержит, в качестве источников гидравлической мощности, главный масляный насос MOP (механическое приведение в действие) и вспомогательный масляный насос SOP (приведение в движение за счет мотора).
Главный масляный насос MOP вращательно приводится в действие посредством вала мотора для мотора MG (= входного вала трансмиссии). Помимо этого, вспомогательный масляный насос SOP приводится в действие посредством встроенного мотора и в основном используется в качестве вспомогательного насоса для формирования смазочного и охлаждающего масла. Вспомогательный масляный насос SOP приводится в действие посредством мощности, предоставляемой из преобразователя 80 постоянного тока, описанного ниже.
[0022] Схема 110 управления гидравлическим давлением содержит соленоидный клапан 111 первой муфты, соленоидный клапан 112 второй муфты и регулирующий клапанный механизм 113 трансмиссии.
Соленоидный клапан 111 первой муфты и соленоидный клапан 112 второй муфты используют давление PL в магистрали, сформированное посредством регулирования давления на выходе из насоса из источника гидравлической мощности, в качестве исходного давления и, соответственно, формируют давление первой муфты и давление второй муфты на основе величины хода.
[0023] Регулирующий клапанный механизм 113 трансмиссии содержит соленоидный клапан, управляемый посредством контроллера 11 трансмиссии и использующий давление PL в магистрали в качестве исходного давления, чтобы создавать первичное давление и вторичное давление согласно величине хода.
[0024] Как описано выше, гибридное транспортное средство содержит "EV-режим", "HEV-режим" и" (HEV) WSC-режим" в качестве основных режимов приведения в движение, и в нем сконфигурирована гибридная приводная система, называемая "системой с одним мотором и двумя муфтами".
[0025] "EV-режим" представляет собой режим электрического транспортного средства, имеющий только мотор MG в качестве источника приведения в движение посредством расцепления первой муфты CL1 и зацепления второй муфты CL2.
"HEV-режим" представляет собой режим гибридного транспортного средства, имеющий двигатель Eng и мотор MG в качестве источников приведения в движение посредством зацепления обеих муфт CL1 и CL2.
"WSC-режим" представляет собой режим зацепления с проскальзыванием CL2, в котором частота вращения мотора MG управляется в "HEV-режиме", и вторая муфта CL2 зацепляется с проскальзыванием с перегрузочной способностью по крутящему моменту зацепления, соответствующей требуемой движущей силе. "WSC-режим" выбирается, чтобы поглощать разность частот вращения между левым и правым передними колесами FL и FR и двигателем Eng, который вращается с частотой вращения, равной или большей частоты вращения на холостом ходу двигателя, в областях от остановки до начала движения или областях от низкой скорости до остановки, при нахождении в "HEV-режиме" посредством зацепления с проскальзыванием CL2. "WSC-режим" требуется, поскольку приводная система не имеет стыкового узла поглощения разности частот вращения, такого как преобразователь крутящего момента.
[0026] Система управления гибридным транспортным средством
Далее описывается система управления гибридным транспортным средством.
Система управления гибридного транспортного средства содержит инвертор INV, аккумулятор BAT с высоким уровнем мощности, интегрированный контроллер 10, контроллер 11 трансмиссии, контроллер 12 муфты, контроллер 13 двигателя, контроллер 14 мотора, контроллер 15 аккумулятора и контроллер 16 переменного тока. В настоящем варианте осуществления, система управления выполнена с возможностью отдельно содержать различные контроллеры; тем не менее, система управления может быть интегрирована в один контроллер.
[0027] Система электропитания гибридного транспортного средства содержит аккумулятор BAT с высоким уровнем мощности в качестве источника мощности мотора-генератора и 12-вольтовый аккумулятор (не показан) в качестве источника мощности 12-вольтовой нагрузки.
[0028] Инвертор INV выполняет преобразование постоянного тока в переменный и формирует ток приведения в действие для мотора MG. Инвертор также инвертирует вращение выходного вала мотора MG посредством инвертирования фазы сформированного тока приведения в действие.
Аккумулятор BAT с высоким уровнем мощности представляет собой аккумуляторную батарею, смонтированную в качестве источника мощности для мотора MG, и, например, для этого используется литий-ионный аккумулятор, в котором модуль гальванических элементов, сконфигурированный с множеством гальванических элементов, задается внутри кожуха аккумуляторного источника мощности. В настоящем варианте осуществления, аккумулятор с высоким уровнем мощности не ограничен литий-ионным аккумулятором и может представлять собой такое средство накопления мощности, как никель-водородный аккумулятор.
[0029] Инвертор INV преобразует мощность постоянного тока из аккумулятора BAT с высоким уровнем мощности в трехфазный переменный ток и подает его в мотор MG, во время подачи мощности, в которое мотор MG приводится в действие посредством разряда аккумулятора BAT с высоким уровнем мощности, посредством управления подачей мощности/рекуперацией посредством контроллера 14 мотора. Помимо этого, инвертор преобразует трехфазную мощность переменного тока из мотора MG в мощность постоянного тока, во время рекуперации для заряда аккумулятора BAT с высоким уровнем мощности, посредством выработки мощности посредством мотора MG.
[0030] Интегрированный контроллер 10 сконфигурирован из электронного модуля управления (ECU), содержащего микрокомпьютер, и вычисляет целевой крутящий момент приведения в движение и т.п. из оставшейся емкости аккумулятора (SOC аккумулятора); величины APO открытия позиции педали акселератора; скорости VSP транспортного средства и т.п. После этого, на основе результата вычисления интегрированный контроллер 10 вычисляет значения команд управления для каждого из актуаторов (мотора MG, двигателя Eng, первой муфты CL1, второй муфты CL2 и бесступенчатой трансмиссии CVT), которые передаются в соответствующие контроллеры 11-15.
[0031] SOC аккумулятора вводится из контроллера 15 аккумулятора. Величина APO открытия позиции педали акселератора определяется посредством датчика 21 величины открытия позиции педали акселератора. Скорость VSP транспортного средства является значением, которое синхронизируется с частотой вращения выходного вала трансмиссии и определяется посредством датчика 22 частоты вращения выходного вала трансмиссии.
Помимо этого, интегрированный контроллер 10 управляет расходом на выходе главного масляного насоса MOP, расходом на выходе вспомогательного масляного насоса SOP и давлением PL в магистрали.
[0032] Контроллер 11 трансмиссии выполняет управление переключением передач таким образом, чтобы достигать команды управления переключением передач из интегрированного контроллера 10. Управление переключением передач выполняется посредством управления гидравлическим давлением, подаваемым в первичный шкив, и гидравлическом давлением, подаваемым во вторичный шкив бесступенчатой трансмиссии CVT, на основе управления регулирующим клапанным механизмом 113 трансмиссии, с использованием давления PL в магистрали, подаваемого через схему 110 управления гидравлическим давлением, в качестве исходного давления.
Затем избыточное давление, сформированное при создании гидравлического давления, подаваемого в первичный шкив, и гидравлического давления, подаваемого во вторичный шкив из давления PL в магистрали, передаются для охлаждения и смазки первой муфты CL1 и второй муфты CL2.
[0033] Кроме того, контроллер 11 трансмиссии выполняет управление трансмиссией посредством "режима бесступенчатой трансмиссии" и управление трансмиссией посредством "режима псевдоступенчатой трансмиссии", в качестве управления трансмиссией для бесступенчатой трансмиссии CVT.
Управление трансмиссией в "режиме бесступенчатой трансмиссии" представляет собой управление для того, чтобы изменять передаточное отношение бесступенчато в диапазоне передаточных чисел от наименьшего передаточного отношения до наибольшего передаточного отношения, которые являются возможными для бесступенчатой трансмиссии CVT.
[0034] С другой стороны, управление трансмиссией в "режиме псевдоступенчатой трансмиссии" представляет собой управление трансмиссией, которое моделирует ступенчатую трансмиссию для изменения передаточного отношения бесступенчатой трансмиссии CVT ступенчато.
Кроме того, "режим D-ступенчатого переключения передач" и "режим ручного переключения передач" предоставляются в качестве "режима псевдоступенчатой трансмиссии".
"Режим D-ступенчатого переключения передач" представляет собой режим для того, чтобы автоматически переключать "вверх" от псевдопервой скорости до псевдошестой скорости ступенчато, в соответствии с величиной APO открытия позиции педали акселератора и скоростью VSP транспортного средства, в ходе движения с ускорением таким образом, что скорость транспортного средства увеличивается в диапазоне высоких величин открытия позиции педали акселератора.
[0035] "Режим ручного переключения передач" представляет собой режим для вручную управления передаточным отношением посредством операции переключения передач водителем. Например, в этом режиме, если водитель выбирает режим ручного переключения передач, и водитель выполняет операцию переключения "вверх" или операцию переключения "вниз" в этом состоянии, ступень переключения передач (фиксированное передаточное отношение) изменяется, и передаточное отношение управляется до передаточного отношения, которое соответствует выбранной ступени переключения передач.
[0036] Как описано выше, поскольку передаточное отношение изменяется ступенчато при переключении передач согласно "режиму D-ступенчатого переключения передач" и "режиму ручного переключения передач" в "режиме псевдоступенчатой трансмиссии", изменение передаточного отношения становится относительно большим, по сравнению с переключением передач в режиме бесступенчатого переключения передач.
[0037] Контроллер 12 муфты принимает частоты вращения входного и выходного вала, температуру масла муфты и т.д. для муфты и выполняет управление первой муфтой и управление второй муфтой таким образом, чтобы достигать команды управления первой муфтой и команды управления второй муфтой из интегрированного контроллера 10.
[0038] Это управление первой муфтой выполняется посредством управления гидравлическим давлением, подаваемым в первую муфту CL1, на основе управления соленоидным клапаном 111 первой муфты, с использованием давления PL в магистрали, подаваемого через схему 110 управления гидравлическим давлением, в качестве исходного давления.
[0039] Помимо этого, управление второй муфтой выполняется посредством управления гидравлическим давлением, подаваемым во вторую муфту CL2, на основе управления соленоидным клапаном 112 второй муфты, с использованием давления PL в магистрали, подаваемого через схему 110 управления гидравлическим давлением, в качестве исходного давления.
[0040] Затем избыточное давление, которое формируется при создании гидравлического давления, подаваемого в первую муфту CL1, и гидравлическое давление, подаваемое во вторую муфту CL2 из давления PL в магистрали, передаются для охлаждения и смазки первой муфты CL1 и второй муфты CL2.
[0041] Контроллер 13 двигателя вводит частоту вращения двигателя, определенную посредством датчика 23 частоты вращения двигателя, команды управления целевым крутящим моментом двигателя из интегрированного контроллера 10 и т.п. Затем контроллер 13 двигателя выполняет управление запуском, управление впрыском топлива, управление зажиганием, управление отсечкой топлива и т.п., чтобы управлять крутящим моментом двигателя таким образом, чтобы достигать значения команды управления целевым крутящим моментом двигателя.
[0042] Контроллер 14 мотора вводит значения команд управления целевым крутящим моментом мотора и значения команд управления частотой вращения мотора из интегрированного контроллера 10, частоту вращения мотора, определенную посредством датчика 24 частоты вращения мотора, и т.п. Затем контроллер 14 мотора выполняет такие виды управления, как управление подачей мощности и рекуперативное управление, управление оборотами мотора в режиме медленного движения и управление оборотами мотора на холостом ходу для мотора MG, с тем чтобы достигать значения команды управления целевым крутящим моментом мотора и значения команды управления частотой вращения мотора.
[0043] Контроллер 15 аккумулятора управляет температурой аккумулятора, SOC аккумулятора, которое представляет собой оставшуюся емкость аккумулятора BAT с высоким уровнем мощности, и т.п. на основе входной информации из датчика 25 напряжения аккумулятора, датчика 26 температуры аккумулятора и т.п. и передает информацию в интегрированный контроллер 10.
[0044] Контроллер 16 переменного тока управляет работой электрического кондиционера 70, на основе определения датчика (не показан), который определяет различные факторы окружающей среды, связанные с температурой в салоне. Электрический кондиционер 70 управляется посредством подачи мощности из аккумулятора BAT с высоким уровнем мощности таким образом, чтобы регулировать температуру внутри транспортного средства, и электрический компрессор 71, который сжимает хладагент, предоставляется в электрическом кондиционере 70. Электрический компрессор 71 включает инвертор (не показан), преобразует мощность постоянного тока, подаваемую из аккумулятора BAT с высоким уровнем мощности, в мощность переменного тока и приводится в действие посредством мотора (не показан). Преобразователь 80 постоянного тока соединяется с аккумулятором BAT с высоким уровнем мощности параллельно с электрическим кондиционером 70. Преобразователь 80 постоянного тока подает мощность постоянного тока в бортовые электрические устройства, такие как вспомогательный масляный насос SOP, после преобразования напряжения аккумулятора BAT с высоким уровнем мощности.
[0045] Конфигурация управления интегрального контроллера
Далее кратко описывается общая конфигурация для выполнения различных видов управления интегрированного контроллера 10.
Интегрированный контроллер 10 содержит модуль 100 вычисления целевого крутящего момента приведения в движение, модуль 200 выбора режима, модуль 300 вычисления целевой выходной мощности заряда-разряда и модуль 400 выдачи команд управления в рабочей точке, как проиллюстрировано на фиг. 2.
[0046] В модуль 100 вычисления целевого крутящего момента приведения в движение, вводятся величина APO открытия позиции педали акселератора, скорость транспортного средства и т.д., и целевой крутящий момент tTd приведения в движение (целевой полный крутящий момент транспортного средства) вычисляется из карты целевого стационарного крутящего момента (одного примера карты крутящего момента двигателя) и карты вспомогательного крутящего момента (одного примера карты крутящего момента мотора-генератора).
[0047] Модуль 200 выбора режима вычисляет то, какой режим приведения в движение должен представлять собой целевой режим приведения в движение, т.е. HEV-режим или EV-режим. Задание режима приведения в движение посредством модуля 200 выбора режима, например, может представлять собой выбор между EV-режимом и HEV-режимом согласно скорости транспортного средства и величине открытия позиции педали акселератора на основе карты выбора режима, которая задается заранее; тем не менее, подробности опускаются.
[0048] Модуль 300 вычисления целевой выходной мощности заряда-разряда увеличивает величину выработки мощности, когда SOC аккумулятора является низким, уменьшает величину выработки мощности, когда SOC аккумулятора является высоким, и вычисляет целевую мощность tP заряда-разряда, с тем чтобы повышать использование усиления мотора.
[0049] Модуль 400 выдачи команд управления в рабочей точке вычисляет целевые показатели наступления рабочей точки из величины APO открытия позиции педали акселератора, целевого крутящего момента tTd приведения в движение, режима приведения в движение, скорости VSP транспортного средства и целевой мощности заряда-разряда, которые выводятся в качестве значений команд управления. Целевой крутящий момент двигателя, целевой крутящий момент мотора, целевая перегрузочная способность по крутящему моменту CL2, целевое передаточное отношение, команда управления соленоидным током первой муфты и команда управления соленоидным током второй муфты вычисляются в качестве этих целевых показателей наступления рабочей точки. В настоящем варианте осуществления, модуль 400 выдачи команд управления в рабочей точке интегрально вычисляет целевой крутящий момент двигателя, целевой крутящий момент мотора, целевую перегрузочную способность по крутящему моменту CL2, целевое передаточное отношение, команду управления соленоидным током первой муфты и команду управления соленоидным током второй муфты; тем не менее, средства для того, чтобы вычислять значения команд управления, могут предоставляться для каждого из означенного.
[0050] Конфигурация управления демпфированием
Интегрированный контроллер 10 содержит модуль 30 вычисления крутящего момента мотора, проиллюстрированный на фиг. 3, который корректирует команду управления крутящим моментом мотора, прикладываемым к мотору MG (целевым крутящим моментом (tTm) мотора) таким образом, чтобы подавлять вибрацию транспортного средства, и выводит его в качестве конечного целевого крутящего момента мотора, в качестве конфигурации, которая выполняет управление демпфированием.
Модуль 30 вычисления крутящего момента мотора содержит модуль 31 управления с прямой связью и модуль 32 управления с обратной связью.
[0051] Модуль 31 управления с прямой связью ослабляет вибрации, вызываемые посредством возмущений, которые предполагаются заранее, и содержит модуль 31a компенсации с прямой связью, который ослабляет целевой крутящий момент tTm мотора (команду управления крутящим моментом мотора), посредством обратного фильтра (не показан) и выводит его в сумматор 33.
[0052] Модуль 32 управления с обратной связью ослабляет предварительно определенную вибрацию, вызываемую посредством фактических возмущений, и содержит модуль 32a компенсации с обратной связью, который выводит компенсационный крутящий момент Tm(F/B), который подавляет предварительно определенный компонент вибрации частоты ωm вращения мотора, выводимой из объекта 34 (приводной системы транспортного средства).
[0053] Помимо этого, модуль 32 управления с обратной связью содержит модуль 32b вычитания, который вычитает компонент (Ss) изменения частоты вращения вибрации, вызываемой посредством переключения передач, описанный позднее, из характерного компонента (Sm+Ss) вибрации посредством возмущений частоты ωm вращения мотора, которые вводятся посредством модуля 32a компенсации с обратной связью.
[0054] Модуль 32 управления с обратной связью содержит модуль 32c переключения, который переключает рабочий режим модуля 32b вычитания между операцией вычитания (заданием), при которой компонент (Ss) изменения частоты вращения вычитается, и отсутствием операции вычитания (очисткой), при котором вычитаемое значение задается равным нулю, и компонент (Ss) изменения частоты вращения не вычитается.
[0055] Таким образом, операция вычитания модуля 32b вычитания выполняется не всегда, а выполняется, когда управляющая команда выводится из модуля 301 определения функционального режима в модуль 32c переключения. Хотя ниже описываются вывод и прекращение вывода управляющей команды, по существу, определяется присутствие или отсутствие переключения передач с большим передаточным отношением/ускорением, и управляющая команда для операции коррекции выводится, когда определяется то, что переключение передач присутствует.
[0056] Модуль 35 вычисления обусловленного переключением передач изменения частоты вращения вычисляет компонент Ss изменения частоты вращения посредством переключения возмущений, включенных в частоту ωm вращения мотора, на основе изменений фактического передаточного отношения RT, которое вводится из модуля 37 вычисления передаточного отношения CVT-трансмиссии, и переключения передач, вычисленного посредством модуля 38 вычисления переключения передач.
[0057] Следовательно, модуль 32a компенсации с обратной связью вводит компонент (Sm+Ss) вибрации посредством возмущений, включенных в частоту ωm вращения мотора, и выводит компенсационный крутящий момент Tm(F/B) для подавления вибрации, во время отсутствия операции вычитания модуля 32b вычитания.
С другой стороны, модуль 32a компенсации с обратной связью вводит компонент Sm вибрации, полученный посредством вычитания компонента Ss изменения частоты вращения вследствие переключения передач, во время операции вычитания модуля 32b вычитания. В это время, компенсационный крутящий момент Tm(F/B), вычисленный посредством модуля 32a компенсации с обратной связью, является значением, полученным посредством вычитания крутящего момента величины компенсации для подавления вибрации посредством компонента Ss изменения частоты вращения вследствие переключения передач.
[0058] Модуль 37 вычисления передаточного отношения CVT-трансмиссии вычисляет передаточное отношение из частоты ωpri вращения первичного шкива, которая представляет собой частоту вращения первичного шкива (не показан) бесступенчатой трансмиссии CVT, и частоты ωsec вращения вторичного шкива, которая представляет собой частоту вращения вторичного шкива (не показан). Хотя эти частоты вращения могут непосредственно определяться посредством предоставления датчика, частоты вращения также могут получаться из частоты вращения мотора, которая определяется посредством датчика 24 частоты вращения мотора, и частоты вращения выходного вала трансмиссии, которая определяется посредством датчика 22 частоты вращения выходного вала трансмиссии.
[0059] Конфигурация модуля определения функционального режима
Далее описывается модуль 301 определения функционального режима, который выводит управляющую команду в модуль 32b вычитания.
Во-первых, описывается последовательность операций определения функционального режима посредством модуля 301 определения функционального режима и процесс подавления вибрации модуля 32 управления с обратной связью, соответствующий ей, на основе блок-схемы последовательности операций способа по фиг. 4.
На этапе S01, определяется то, составляет или нет температура масла (температура масла в CVT) бесступенчатой трансмиссии CVT, которая определяется посредством датчика 27 температуры масла в CVT, предварительно определенное значение или выше; если равна или больше предварительно определенного значения, процесс переходит к этапу S02, а если меньше предварительно определенного значения, процесс переходит к этапу S05. Предварительно определенное значение определяет то, наступает или нет время после прогрева, при котором вязкость масла бесступенчатой трансмиссии CVT в некоторой степени уменьшена, т.е. состояние, в котором требуемая скорость реакции может получаться при управлении передаточным отношением бесступенчатой трансмиссии CVT. Таким образом, когда температура масла в CVT является низкой, скорость реакции фактического передаточного отношения относительно значения команды управления целевого передаточного отношения в бесступенчатую трансмиссию CVT не может получаться в достаточной степени, и затруднительно получать требуемые рабочие характеристики демпфирования посредством управления демпфированием, которое описывается ниже. Следовательно, предварительно определенное значение задается равным значению, с помощью которого можно определять то, может или нет получаться требуемая скорость реакции, описанная выше.
[0060] На этапе S02, к которому процесс переходит, когда температура масла в CVT равна или выше предварительно определенного значения, определяется то, подвергается или нет бесступенчатая трансмиссия CVT управлению синхронизацией вращения; если синхронизация вращения выполняется, процесс переходит к этапу S04, а если управление синхронизацией вращения не выполняется, процесс переходит к этапу S03. То, выполняется или нет управление синхронизацией вращения, определяется посредством определения того, что управление синхронизацией вращения выполняется, когда задается флаг синхронизации вращения, который указывает выполнение переключения передач посредством "режима D-ступенчатого переключения передач" и "режима ручного переключения передач" в "режиме псевдоступенчатой трансмиссии", на основе команды контроллера 11 трансмиссии.
[0061] На этапе S03, к которому процесс переходит, когда синхронизация вращения не выполняется, если определяется то, определено или нет то, что изменение передаточного отношения бесступенчатой трансмиссии CVT является заблаговременным; если определено как заблаговременное, процесс переходит к этапу S04, а если определено как не заблаговременное, процесс переходит к этапу S05. Определение в отношении того, является или нет изменение передаточного отношения заблаговременным, определяется из того, превышает или нет дифференциал второго порядка (передаточное отношение/ускорение) целевого передаточного отношения (значения команды управления) предварительно установленное пороговое значение, в секции 341 определения большого передаточного отношения/ускорения, описанной позднее.
[0062] На этапе S04, к которому процесс переходит, когда определяется то, что управление синхронизацией вращения выполняется на этапе S02, и определяется то, что изменение передаточного отношения является заблаговременным, на этапе S03, изменение вращения вследствие переключения передач вычитается, чтобы вычислять компенсационный крутящий момент Tm(F/B).
[0063] Таким образом, модуль 32c переключения по фиг. 3 активируется, и компонент (Ss) изменения частоты вращения вследствие переключения передач вычитается из компонента (Sm+Ss) вибрации частоты вращения мотора в модуле 32b вычитания. Следовательно, модуль 32a компенсации с обратной связью вычитает крутящий момент величины компенсации для подавления изменения вращения (вибрации) вследствие переключения передач, чтобы вычислять компенсационный крутящий момент Tm(F/B).
[0064] С другой стороны, на этапе S05, к которому процесс переходит, если температура масла в CVT меньше предварительно определенного значения ("Нет" на этапе S01), или если управление синхронизацией вращения не выполняется, и переключение передач CVT не является заблаговременным ("Нет" на этапе S03), компенсационный крутящий момент Tm(F/B) вычисляется без вычитания изменения вращения вследствие переключения передач.
[0065] Таким образом, модуль 32c переключения по фиг. 3 деактивируется, и компонент (Sm+Ss) вибрации частоты ωm вращения мотора вводится в модуль 32a компенсации с обратной связью без вычитания компонента (Ss) изменения частоты вращения вследствие переключения передач в модуле 32b вычитания. Следовательно, модуль 32a компенсации с обратной связью вычисляет компенсационный крутящий момент Tm(F/B) для подавления вибрации (Sm+Ss) частоты вращения мотора.
[0066] Подробности конфигурации модуля определения функционального режима
Далее описывается конфигурация модуля 301 определения функционального режима, проиллюстрированного на фиг. 3, на основе фиг. 5.
Модуль 301 определения функционального режима выполняет процесс этапов S01-S03 на блок-схеме последовательности операций способа по фиг. 4 и содержит секцию 310 определения температурного режима масла в CVT, секцию 320 определения функциональных запросов в ходе управления синхронизацией вращения и секцию 330 определения запросов на ускорение/передаточное отношение.
[0067] Секция 310 определения температурного режима масла в CVT вводит температуру масла в CVT и выводит флаг функционального режима в модуль 32c переключения (см. фиг. 3), если температура масла в CVT равна или выше предварительно определенного значения, и сигнал активации, указывающий то, что функциональный запрос вводится из секции 320 определения функциональных запросов в ходе управления синхронизацией вращения.
[0068] Секция 320 определения функциональных запросов в ходе управления синхронизацией вращения выводит сигнал активации, указывающий функциональный запрос в секцию 310 определения температурного режима масла в CVT, когда одно из ввода флага выполнения управления синхронизацией вращения и ввода секции 330 определения запросов на ускорение/передаточное отношение указывает флаг функционального режима.
Флаг выполнения управления синхронизацией вращения представляет собой флаг, задаваемый при переключении передач посредством одного из "режима D-ступенчатого переключения передач" и "режима ручного переключения передач" с относительно большим изменением передаточного отношения в вышеописанном "режиме псевдоступенчатой трансмиссии".
[0069] Секция 330 определения запросов на ускорение/передаточное отношение выводит сигнал активации, указывающий функциональный запрос при выполнении переключения передач с относительно большим изменением передаточного отношения, за счет чего передаточное отношение/ускорение равно или выше порогового значения, описанного позднее. Таким образом, переключение передач с большим изменением передаточного отношения определяется в ходе переключения передач посредством режима, отличного от "режима D-ступенчатого переключения передач" и "режима ручного переключения передач" в секции 330 определения запросов на ускорение/передаточное отношение.
[0070] Ниже описывается конфигурация секции 330 определения запросов на ускорение/передаточное отношение на основе фиг. 6.
Секция 330 определения запросов на ускорение/передаточное отношение содержит секцию 340 задания функциональных запросов, секцию 350 очистки функциональных запросов и секцию 360 вывода запросов на ускорение/передаточное отношение.
Секция 340 задания функциональных запросов выводит сигнал задания, который указывает функциональный запрос при определении переключения передач с большим изменением передаточного отношения, в котором передаточное отношение/ускорение составляет предварительно определенное значение или больше. Эта секция 340 задания функциональных запросов содержит секцию 341 определения большого передаточного отношения/ускорения, первый дифференциатор 342, второй дифференциатор 343, фильтр 344 нижних частот, секцию 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении и секцию 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении, как проиллюстрировано на фиг. 6.
[0071] Секция 341 определения большого передаточного отношения/ускорения выводит сигнал задания, когда определяется переключение передач с большим передаточным отношением/ускорением, которое представляет собой условие для выполнения операции вычитания, чтобы вычитать компонент (Ss) изменения частоты вращения вследствие переключения передач. Таким образом, определение "Да" выполняется на этапе S03 на блок-схеме последовательности операций способа по фиг. 4.
[0072] В частности, секция 341 определения большого передаточного отношения/ускорения вводит целевое передаточное отношение/ускорение, полученное посредством подвергания целевого передаточного отношения (значения команды управления), которое вводится из контроллера 11 трансмиссии, дифференцированию второго порядка в первом дифференциаторе 342 и втором дифференциаторе 343 и удаления шума из него посредством процесса фильтрации фильтра 344 нижних частот.
Кроме того, секция 341 определения большого передаточного отношения/ускорения вводит пороговое значение переключения трансмиссии "вверх" при ускорении из секции 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении и вводит пороговое значение переключения трансмиссии "вниз" при ускорении из секции 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении.
Затем секция 341 определения большого передаточного отношения/ускорения выводит сигнал задания, если передаточное отношение/ускорение указывает быстрое ускорение, которое превышает пороговое значение переключения трансмиссии "вверх" при ускорении в ходе переключения "вверх", или указывает быстрое ускорение, которое превышает пороговое значение переключения трансмиссии "вниз" при ускорении в ходе переключения "вниз".
[0073] Секция 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении задает пороговое значение для определения того, имеет или нет переключение передач большое передаточное отношение/ускорение в ходе переключения "вверх" (когда передаточное отношение уменьшается).
Секция 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении задает пороговое значение для определения того, имеет или нет переключение передач большое передаточное отношение/ускорение в ходе переключения "вниз" (когда передаточное отношение увеличивается).
Затем секция 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении и секция 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении, соответственно, вводят скорость VSP транспортного средства и передаточное отношение до переключения передач и задают абсолютное значение каждого порогового значения равным меньшему значению по мере того, как скорость VSP транспортного средства увеличивается, и передаточное отношение увеличивается (сторона низких ступеней переключения передач). Как результат, скорость реакции (чувствительность) при определении переключения передач с большим передаточным отношением/ускорением увеличивается по мере того, как скорость VSP транспортного средства увеличивается, и по мере того, как передаточное отношение до переключения передач увеличивается (сторона низких ступеней переключения передач).
[0074] Когда сигнал задания вводится из секции 341 определения большого передаточного отношения/ускорения, секция 360 вывода запросов на ускорение/передаточное отношение выводит сигнал активации, указывающий функциональный запрос, в секцию 320 определения функциональных запросов в ходе управления синхронизацией вращения (см. фиг. 5).
С другой стороны, когда сигнал очистки вводится из секции 350 очистки функциональных запросов, секция 360 вывода запросов на ускорение/передаточное отношение прекращает (деактивирует) вывод сигнала активации, указывающего функциональный запрос.
[0075] Секция 350 очистки функциональных запросов определяет условие для прекращения вывода функционального запроса секции 330 определения запросов на ускорение/передаточное отношение и содержит логическую схему 351 "И", логическую схему 352 "ИЛИ" и таймер 353.
[0076] Логическая схема 351 "И" определяет условие очистки для функционального запроса на основе передаточного отношения/ускорения, которое основано на изменении передаточного отношения, и выводит сигнал активации, указывающий очистку для логической схемы 352 "ИЛИ" то, когда условие очистки удовлетворяется.
Таймер 353 определяет условие очистки для функционального запроса на основе передаточного отношения/ускорения, которое основано на истекшем времени, и выводит сигнал активации, указывающий очистку для логической схемы 352 "ИЛИ" то, когда условие очистки удовлетворяется.
Логическая схема 352 "ИЛИ" выводит сигнал очистки в секцию 360 вывода запросов на ускорение/передаточное отношение, когда сигнал активации вводится из любого из логической схемы 351 "И" и таймера 353.
[0077] Здесь добавляются описания относительно условия очистки для запроса на ускорение/передаточное отношение на основе изменения передаточного отношения посредством логической схемы 351 "И" секции 350 очистки функциональных запросов и условия очистки для функционального запроса на основе истекшего времени посредством таймера 353.
[0078] Условие очистки для функционального запроса на основе передаточного отношения/ускорения логической схемы 351 "И" удовлетворяется, когда определяется то, что переключение передач с большим передаточным отношением/ускорением завершено. Это определение завершения переключения передач выполняется, когда фактическое передаточное отношение соответствует целевому передаточному отношению (значению команды управления), темп изменения целевого передаточного отношения (значения команды управления) опускается ниже предварительно определенного значения и достигает достигаемого передаточного отношения, которое представляет собой передаточное отношение, которого целевое передаточное отношение (значение команды управления) достигает после переключения передач.
[0079] Следовательно, логическая схема 351 "И" вводит сигнал из секции 351a определения первых небольших отклонений, которая определяет следующее от фактического передаточного отношения до целевого передаточного отношения, когда отклонение между фактическим передаточным отношением и целевым передаточным отношением (значением команды управления) становится меньше предварительно определенного значения.
Помимо этого, логическая схема 351 "И" вводит сигнал из секции 351b определения небольших темпов изменения, которая определяет уменьшение темпа изменения целевого передаточного отношения, меньшее предварительно определенного значения.
Кроме того, логическая схема 351 "И" вводит сигнал из секции 351c определения вторых небольших отклонений, которая определяет то, что отклонение между целевым передаточным отношением и достигаемым передаточным отношением становится меньше предварительно определенного значения.
После этого, когда сигналы определения, которые удовлетворяют условиям, вводятся из всего из секции 351a определения первых небольших отклонений, секции 351b определения небольших темпов изменения и секции 351c определения вторых небольших отклонений, логическая схема 351 "И" выводит сигнал активации, указывающий установление условия очистки, в логическую схему 352 "ИЛИ".
[0080] Помимо этого, когда истекшее время со времени, когда секция 341 определения большого передаточного отношения/ускорения выводит сигнал задания, превышает предварительно установленное верхнее предельное время функционального режима, таймер 353 выводит сигнал, указывающий то, что верхнее предельное время функционального режима превышено, в логическую схему 352 "ИЛИ", сигнал активации, который указывает условие очистки. Верхнее предельное время функционального режима задается равным времени, в которое можно завершать переключение передач, чтобы выполнять изменение передаточного отношения, что является идентичным управлению синхронизацией вращения. Помимо этого, верхнее предельное время функционального режима по существу задает верхний предел времени от начала операции вычитания модуля 32b вычитания, и начало подсчета таймера 353 может быть временем, в которое задается флаг функционального режима модуля 301 определения функционального режима.
[0081] Операции первого варианта осуществления
Далее описываются операции первого варианта осуществления.
Во-первых, кратко описывается работа модуля 32 управления с обратной связью в первом варианте осуществления.
Нормальное время
В нормальное время, при отсутствии переключения передач либо при переключении передач с относительно небольшим изменением передаточного отношения, за исключением выполнения переключения передач с относительно большим изменением передаточного отношения, модуль 32a компенсации с обратной связью вводит компонент (Sm+Ss) вибрации частоты ωm вращения мотора, которая выводится из объекта 34, проиллюстрированного на фиг. 3. Из компонентов вибрации, Sm указывает компонент вибрации мотора MG, а Ss указывает компонент изменения частоты вращения вследствие переключения передач бесступенчатой трансмиссии CVT.
[0082] В этом случае, модуль 32a компенсации с обратной связью выводит компенсационный крутящий момент Tm(F/B) обратного крутящего момента, чтобы демпфировать компоненты (Sm+Ss) вибрации, в сумматор 33, чтобы получать требуемые рабочие характеристики демпфирования. Следовательно, можно подавлять вибрацию посредством компонента возмущений, который действует на транспортное средство, включающего в себя переключение передач. Следовательно, если возникает вибрация, вызываемая посредством переключения передач бесступенчатой трансмиссии CVT, модуль 32a компенсации с обратной связью также выводит компенсационный крутящий момент Tm(F/B), который демпфирует эти вибрационные возмущения.
[0083] При переключении передач с большим передаточным отношением/ускорением
В ходе переключения передач с относительно большим изменением передаточного отношения, для которого секция 341 определения большого передаточного отношения/ускорения выводит сигнал задания, модуль 32b вычитания вычитает компонент (Ss) изменения частоты вращения из компонента (Sm+Ss) вибрации частоты ωm вращения мотора, которая выводится из объекта 34, проиллюстрированного на фиг. 3. Компонент (Ss) изменения частоты вращения представляет собой изменение частоты вращения, которое вычисляется посредством модуля 35 вычисления обусловленного переключением передач изменения частоты вращения, на основе изменения фактического передаточного отношения.
[0084] Следовательно, модуль 32a компенсации с обратной связью вычитает компонент компенсационного крутящего момента для подавления компонента (Ss) изменения частоты вращения из компенсационного крутящего момента Tm(F/B), который должен вычисляться.
За счет этого можно уменьшать толчок в силу возникновения тяги посредством компонента компенсационного крутящего момента для подавления компонента (Ss) изменения частоты вращения и повышать скорость реакции при переключении передач.
[0085] Ниже описываются рабочие характеристики уменьшения толчка в силу возникновения тяги на основе фиг. 7A и фиг. 7B.
[0086] Фиг. 7A указывает пример работы в ходе ручного переключения "вверх" согласно сравнительному примеру, в котором компонент (Ss) изменения частоты вращения, вызываемый посредством изменения передаточного отношения, не вычитается.
Помимо этого, фиг. 7B иллюстрирует пример работы в ходе ручного переключения "вверх" в настоящем варианте осуществления, в котором компонент (Ss) изменения частоты вращения, вызываемый посредством изменения передаточного отношения, вычитается.
Помимо этого, на фиг. 7A и фиг. 7B, DRa1 указывает целевое передаточное отношение до переключения передач, DRa2 указывает целевое передаточное отношение после переключения передач, Ra0 указывает значение команды управления переключением передач, и DRa2 указывает целевое передаточное отношение в конце переключения передач.
[0087] В примере работы, проиллюстрированном на фиг. 7A, компенсационный крутящий момент Tm(F/B), вычисленный посредством модуля 32a компенсации с обратной связью, включает в себя компенсационный крутящий момент для подавления уменьшения частоты вращения выходного вала вследствие переключения передач. Соответственно, крутящий момент мотора (после управления демпфированием) включает в себя компонент обратного крутящего момента (компонент увеличения частоты вращения), соответствующий компенсационному крутящему моменту для демпфирования компонента (Ss) изменения частоты вращения вследствие изменения передаточного отношения.
[0088] Следовательно, компонент обратного крутящего момента компонента увеличения частоты вращения выходного вала в этом компенсационном крутящем моменте Tm(F/B) становится толчком в силу возникновения тяги, и возникает варьирование ΔG1 продольного ускорения транспортного средства, что также требует времени для восстановления в нормальное состояние. Поскольку этот толчок в силу возникновения тяги увеличивается по абсолютной величине, когда скорость реакции при переключении передач увеличивается, и изменение частоты вращения увеличивается, необходимо также ограничивать скорость реакции при переключении передач, и становится затруднительным выполнять быстрое переключение передач.
[0089] Напротив, в первом варианте осуществления, модуль 32a компенсации с обратной связью вычисляет компенсационный крутящий момент Tm(F/B) после вычитания компонента (Ss) изменения частоты вращения вследствие переключения передач. Следовательно, крутящий момент мотора, проиллюстрированный на фиг. 7B, не включает в себя компонент компенсационного крутящего момента для подавления компонента (Ss) изменения частоты вращения вследствие изменения передаточного отношения.
[0090] Соответственно, толчок в силу возникновения тяги, вызываемый посредством обратного крутящего момента для подавления изменения вращения вследствие переключения передач, подавляется, и варьирование ΔG2 продольного ускорения транспортного средства становится меньшим значением, чем варьирование ΔG1 продольного ускорения на фиг. 7A. Дополнительно, сокращается время, требуемое для возврата варьирования ΔG2 продольного ускорения транспортного средства в нормальное состояние, повышается скорость реакции при переключении передач, и появляется возможность выполнять быстрое переключение передач.
[0091] С другой стороны, если вычитание компонента (Ss) изменения частоты вращения вследствие изменения передаточного отношения всегда выполняется, если вибрация формируется в бесступенчатой трансмиссии CVT, эта вибрация не может подавляться.
Следовательно, в первом варианте осуществления, вычитание компонента (Ss) изменения частоты вращения вследствие изменения передаточного отношения посредством модуля 32b вычитания, описанного выше, выполняется только во время резкого изменения передаточного отношения, при котором передаточное отношение/ускорение равно или выше порогового значения, при котором толчок в силу возникновения тяги является значительным.
Как результат, в то время как демпфирование компонента (Ss) изменения частоты вращения посредством бесступенчатой трансмиссии CVT выполняется в пределах нормального времени, можно подавлять формирование толчка в силу возникновения тяги посредством компенсационного крутящего момента Tm(F/B) для подавления компонента (Ss) изменения частоты вращения во время резкого изменения передаточного отношения.
[0092] Определение резкого изменения передаточного отношения
Далее описываются рабочие характеристики определения переключения передач (резкого изменения передаточного отношения) с передаточным отношением/ускорением, которое превышает пороговое значение (пороговое значение переключения трансмиссии "вверх" при ускорении, пороговое значение переключения трансмиссии "вниз" при ускорении) первого варианта осуществления.
В первом варианте осуществления, в дополнение к определению (S02) переключение передач с большим изменением передаточного отношения посредством ввода флага выполнения управления синхронизацией вращения из контроллера 11 трансмиссии, присутствие или отсутствие переключения передач с большим изменением передаточного отношения определяется на основе целевого передаточного отношения (значения команды управления) (S03).
[0093] Такое переключение передач с большим изменением передаточного отношения (резким изменением передаточного отношения) возникает, например, когда нога водителя резко снимается с педали акселератора при быстром ускорении при том, что педаль акселератора (не показана) сильно нажата.
[0094] Работа в таком случае описывается посредством сравнения работы согласно сравнительному примеру на фиг. 8A, на котором операция вычитания посредством модуля 32b вычитания не выполняется, и примером работы первого варианта осуществления на фиг. 8B, на котором операция вычитания посредством модуля 32b вычитания выполняется.
Как проиллюстрировано на фиг. 8A и 8B, после поддержания состояния, в котором величина APO открытия позиции педали акселератора является большой, целевой крутящий момент мотора (значение TTMG команды управления крутящим моментом мотора) быстро снижается (время t8a, t8b) в ответ на быстрое снижение величины APO открытия позиции педали акселератора до 0.
[0095] В ответ, целевое передаточное отношение Ra0 (значение команды управления) изменяется таким образом, что оно демонстрирует выпуклый вверх пик, и передаточное отношение резко изменяется. Изменения целевого передаточного отношения DRa (до переключения передач, после переключения передач), целевого передаточного отношения Ra0 (значения команды управления) и фактического передаточного отношения RaT проиллюстрированы на фиг. 9A.
Таким образом, даже при таком движении, как описано выше, целевое передаточное отношение DRa (до переключения передач, после переключения передач), целевое передаточное отношение Ra0 (значение команды управления) и фактическое передаточное отношение RaT показывают изменения, идентичные изменениям в ходе управления синхронизацией вращения.
[0096] Следовательно, когда операция коррекции посредством модуля 32b вычитания не выполняется, как описано выше, компенсационный крутящий момент Tm(F/B) включает в себя крутящий момент для демпфирования компонента Ss изменения частоты вращения; за счет этого возникает толчок в силу возникновения тяги, и скорость реакции ухудшается.
Таким образом, значение TTMG команды управления крутящим моментом мотора и логически выведенный фактический крутящий момент STMG мотора отклоняются, как проиллюстрировано на чертеже, и формируется изменение ΔGa продольного ускорения транспортного средства, как проиллюстрировано на фиг. 8A.
Напротив, в примере, проиллюстрированном на фиг. 8B, отклонение между значением TTMG команды управления крутящим моментом мотора и логически выведенным фактическим крутящим моментом STMG мотора подавляется, и изменение ΔGb продольного ускорения транспортного средства подавляется в большей степени, чем изменение ΔGa продольного ускорения транспортного средства на фиг. 8A.
[0097] Следовательно, необходимо точно определять такое резкое изменение передаточного отношения и выполнять вычитание посредством модуля 32b вычитания, как описано выше, чтобы подавлять изменение продольного ускорения G.
[0098] Соответственно, в первом варианте осуществления, дифференцирование второго порядка выполняется посредством первого дифференциатора 342 и второго дифференциатора 343 в секции 340 задания функциональных запросов, чтобы определять переключение передач с большим передаточным отношением/ускорением.
[0099] Фиг. 9B иллюстрирует дифференциальное значение первого порядка целевого передаточного отношения Ra0 (значения команды управления), показанного на фиг. 9A, и фиг. 9C иллюстрирует дифференциальное значение второго порядка целевого передаточного отношения Ra0 (значения команды управления), показанного на фиг. 9A.
Дифференциальное значение первого порядка, показанное на фиг. 9B, постепенно изменяется до и после переключения передач и становится изменением, которое превышает 0; в силу этого сравнение с пороговым значением является сложным, и затруднительно точно определять время ts переключения передач. Следовательно, затруднительно выполнять вычитание компонента (Ss) изменения частоты вращения, вызываемого посредством переключения передач посредством модуля 32b вычитания, в точное время.
[0100] Напротив, дифференциальное значение второго порядка целевого передаточного отношения Ra0 (значения команды управления), показанного на фиг. 9C, изменяется с быстрым наклоном во время изменения передаточного отношения вокруг вершины крышевидной формы целевого передаточного отношения Ra0 (значения команды управления), как проиллюстрировано, и величина изменения также является большой. Следовательно, определение времени ts переключения передач по сравнению с предварительно определенным пороговым значением (пороговым значением переключения трансмиссии "вверх" при ускорении, пороговым значением переключения трансмиссии "вниз" при ускорении) становится простым и высокоточным.
[0101] Следовательно, операция вычитания посредством модуля 32b вычитания выполняется, на основе определения того, что изменение передаточного отношения является большим (заблаговременным) на основе дифференциала второго порядка и, как проиллюстрировано на фиг. 8B, повышается скорость реакции логически выведенного фактического крутящего момента STMG мотора относительно значения TTMG команды управления крутящим моментом мотора, и также могут подавляться изменения в продольном ускорении.
Определение окончания
Далее описывается определение при окончании операции вычитания для компонента (Ss) изменения частоты вращения посредством модуля 32b вычитания.
Фиг. 10 является временной диаграммой, иллюстрирующей взаимосвязь между функциональным запросом (заданием) и нефункциональным запросом (сбросом) в модуле 301 определения функционального режима, иллюстрирующей примеры работы для функционального запроса, выводимого посредством секции 340 задания функциональных запросов, и очистки функционального запроса (нефункционального запроса) секции 350 очистки функциональных запросов.
[0102] Как описано выше, задание функционального запроса выполняется во время t1, когда передаточное отношение/ускорение превышает одно из двух пороговых значений в секции 341 определения большого передаточного отношения/ускорения.
Модуль 32b вычитания за счет этого начинает операцию вычитания, и определение окончания этой операции вычитания модуля 32b вычитания выполняется на основе определения очистки посредством секции 350 очистки функциональных запросов по фиг. 5.
[0103] Одно из определений очистки выполняется посредством изменения передаточного отношения, возвращающегося к нормальному.
Таким образом, как проиллюстрировано посредством времени t2 на фиг. 10, когда фактическое передаточное отношение соответствует целевому передаточному отношению, и отклонение между ними уменьшается, и целевое передаточное отношение достигает достигаемого передаточного отношения, и отклонение между ними уменьшается, и темп изменения целевого передаточного отношения уменьшается, определяется то, что операция вычитания завершена.
Эти определения выполняются на основе того факта, что отклонение, вычисленное посредством секции 351a определения первых небольших отклонений, проиллюстрированной на фиг. 6, отклонение, вычисленное посредством секции 351b определения небольших темпов изменения, и отклонение, вычисленное посредством секции 351c определения вторых небольших отклонений, становятся меньше соответствующих предварительно определенных значений.
[0104] Другое определение очистки выполняется, когда истекшее время от момента времени, в который передаточное отношение/ускорение превышает пороговое значение, превышает верхнее предельное время функционального запроса. Верхнее предельное время задается равным времени, за которое может надежно завершаться переключение передач с резким изменением передаточного отношения; когда истекшее время превышает это время, операция вычитания модуля 32b вычитания завершается.
[0105] Таким образом, в первом варианте осуществления, условие очистки для операции вычитания модуля 32b вычитания выполнено с возможностью удовлетворять всему из следующего: целевое передаточное отношение придерживается фактического передаточного отношения, целевое передаточное отношение достигает достигаемого передаточного отношения, и уменьшение темпа изменения целевого передаточного отношения. Соответственно, операция коррекции вычитания надежно выполняется в ходе переключения передач; в силу этого может подавляться возникновение тяги, описанное выше.
Помимо этого, можно выполнять операцию коррекции вычитания за пределами этого резкого переключения передач и подавлять проблему демпфирования компонента вибрации бесступенчатой трансмиссии CVT.
[0106] Помимо этого, посредством задания верхнего предельного времени функционального запроса, если первое условие определения очистки, описанное выше, не удовлетворяется, можно продолжать управление для того, чтобы подавлять проблему демпфирования компонента вибрации бесступенчатой трансмиссии CVT.
[0107] Преимущества первого варианта осуществления
Ниже упоминаются преимущества устройства управления демпфированием для электрического транспортного средства согласно первому варианту осуществления.
1) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления имеет бесступенчатую трансмиссию CVT, предоставленную между мотором MG и левым и правым передними колесами FL и FR в качестве ведущих колес; и модуль 32 управления с обратной связью в качестве средства подавления вибрации при переключении передач, которое вычитает величину компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B) для подавления вибрации, вызываемой посредством возмущений частоты вращения мотора MG, чтобы управлять выходным крутящим моментом мотора MG, содержащий: первый дифференциатор 342 и второй дифференциатор 343 в качестве средства вычисления дифференцирования второго порядка передаточного отношения, которое вычисляет дифференциал второго порядка передаточного отношения бесступенчатой трансмиссии CVT, при этом когда абсолютное значение дифференциала второго порядка передаточного отношения равно или выше порогового значения переключения трансмиссии "вверх" при ускорении и порогового значения переключения трансмиссии "вниз" при ускорении, в качестве предварительно определенных значений, модуль 32 управления с обратной связью управляет выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Посредством сравнения абсолютного значения дифференциала второго порядка передаточного отношения с каждым пороговым значением, появляется возможность точно определять переключение передач и предотвращать ошибочное определение переключения передач.
Следовательно, появляется возможность проводить операцию для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента посредством модуля 32 управления с обратной связью в точное время.
Помимо этого, появляется возможность подавлять толчок в силу возникновения тяги, вызываемый посредством обратного крутящего момента, при этом компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач с большим изменением передаточного отношения, включен в компенсационный крутящий момент, и за счет этого сокращать время переключения передач.
Помимо этого, в первом варианте осуществления, поскольку передаточное отношение/ускорение вычисляется из целевого передаточного отношения Ra0 (значения команды управления), по сравнению с вычислением из фактического передаточного отношения RaT, существует превосходная скорость реакции при определении присутствия или отсутствия изменения передаточного отношения, и компонент шума не включен; в силу этого может получаться высокая точность определения присутствия или отсутствия изменения передаточного отношения.
С другой стороны, поскольку вибрация, вызываемая посредством переключения передач, которая должна вычитаться посредством модуля 32b вычитания, вычисляется в модуле 35 вычисления обусловленного переключением передач изменения частоты вращения на основе фактического передаточного отношения RaT, компонент (Ss) изменения частоты вращения вследствие переключения передач может точно вычитаться из компонента (Sm+Ss) вибрации частоты вращения мотора.
[0108] 2) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления содержит: модуль 301 определения функционального режима в качестве средства определения переключения передач, которое определяет присутствие или отсутствие изменения передаточного отношения на основе дифференциала второго порядка, при этом когда модуль 301 определения функционального режима определяет то, что существует изменение передаточного отношения, модуль 32 управления с обратной связью управляет выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Посредством определения присутствия или отсутствия изменения передаточного отношения на основе дифференциала второго порядка целевого передаточного отношения (значения команды управления), можно точно определять присутствие или отсутствие изменения передаточного отношения, с тем чтобы управлять выходным крутящим моментом мотора MG в точное время.
[0109] 3) Устройство управления демпфированием для электрического транспортного средства, согласно первому варианту осуществления дополнительно содержит: секцию 320 определения функциональных запросов в ходе управления синхронизацией вращения в качестве средства определения режима ручного переключения передач, которое определяет то, представляет он собой или нет режим ручного переключения передач, в котором передаточное отношение изменяется ступенчато на основе запроса на переключение передач водителя, при этом при переключении передач посредством режима ручного переключения передач, модуль 32 управления с обратной связью управляет выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B), независимо от значения дифференциала второго порядка.
Поскольку передаточное отношение варьируется ступенчато в режиме ручного переключения передач, изменение передаточного отношения является относительно большим.
Следовательно, при переключении передач посредством режима ручного переключения передач, посредством выполнения управления для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента независимо от значения дифференциала второго порядка, можно уменьшать толчок в силу возникновения тяги, вызываемый посредством обратного крутящего момента.
[0110] 4) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления дополнительно содержит датчик 27 температуры масла в CVT в качестве средства определения температуры рабочей жидкости, которое определяет температуру масла бесступенчатой трансмиссии CVT, при этом когда температура масла в CVT равна или выше предварительно определенной температуры, модуль 32 управления с обратной связью управляет выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Когда температура масла бесступенчатой трансмиссии CVT уменьшается, бесступенчатая трансмиссия CVT не работает нормально; в силу этого значение команды управления передаточного отношения и фактическое передаточное отношение отклоняются, и возникают случаи, в которых модуль 32 управления с обратной связью не работает надлежащим образом.
Тем не менее, здесь, управление для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, не выполняется, если температура масла в CVT не равна или выше предварительно определенной температуры; в силу этого не допускается становление нестабильным управление движущей силой транспортного средства.
[0111] 5) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления содержит секцию 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении и секцию 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении, которые задают пороговое значение переключения трансмиссии "вверх" при ускорении и пороговое значение переключения трансмиссии "вниз" при ускорении в качестве меньших предварительно определенных значений по мере того, как скорость VSP транспортного средства увеличивается.
В общем, вибрация, вызываемая посредством переключения передач, становится большей по мере того, как скорость VSP транспортного средства увеличивается. Здесь, поскольку предварительно определенное значение для определения присутствия или отсутствия изменения передаточного отношения уменьшается по мере того, как скорость VSP транспортного средства увеличивается, можно повышать скорость реакции (чувствительность) при определении относительно присутствия или отсутствия изменения передаточного отношения. За счет этого можно также увеличивать скорость реакции подавления относительно толчка в силу возникновения тяги, вызываемого посредством обратного крутящего момента, как описано в 1) выше.
[0112] 6) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления содержит секцию 345 вычисления пороговых значений переключения трансмиссии "вверх" при ускорении и секцию 346 вычисления пороговых значений переключения трансмиссии "вниз" при ускорении, которые задают пороговое значение переключения трансмиссии "вверх" при ускорении и пороговое значение переключения трансмиссии "вниз" при ускорении, в качестве предварительно определенных значений, меньшими по мере того, как ступень переключения передач уменьшается.
В общем, вибрация, сопровождающая переключение передач, увеличивается по мере того, как ступень переключения передач снижается (передаточное отношение становится больше). Здесь, поскольку предварительно определенное значение для определения низшей ступени переключения передач (большое передаточное отношение) и присутствия или отсутствия изменения передаточного отношения задается небольшим, можно повышать скорость реакции (чувствительность) при определении относительно присутствия или отсутствия изменения передаточного отношения. За счет этого можно также увеличивать скорость реакции подавления относительно толчка в силу возникновения тяги, вызываемого посредством обратного крутящего момента, как описано в 1) выше.
[0113] 7) В устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления, модуль 32 управления с обратной связью прекращает управление выходным крутящим моментом после того, как верхнее предельное время функционального режима истекло в качестве предварительно определенного времени от начала управления выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Следовательно, можно продолжать операцию для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, даже после того, как переключение передач завершено, чтобы предотвращать ухудшение рабочих характеристик подавления вибрации, относительно компонента вибрации бесступенчатой трансмиссии CVT.
[0114] 8) Устройство управления демпфированием для электрического транспортного средства согласно первому варианту осуществления содержит контроллер 11 трансмиссии, который задает целевое передаточное отношение бесступенчатой трансмиссии CVT, и когда отклонение между фактическим передаточным отношением, определенным посредством модуля 37 вычисления передаточного отношения CVT-трансмиссии в качестве средства определения передаточного отношения, и целевым передаточным отношением меньше предварительно определенного значения, модуль 32 управления с обратной связью прекращает управление для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач.
Следовательно, можно продолжать операцию для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, даже после того, как переключение передач завершено, чтобы предотвращать ухудшение рабочих характеристик подавления вибрации, относительно компонента вибрации бесступенчатой трансмиссии CVT.
[0115] 9) В устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления, когда темп изменения целевого передаточного отношения меньше предварительно определенного значения, модуль 32 управления с обратной связью прекращает управление выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Следовательно, можно продолжать операцию для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, даже после того, как переключение передач завершено, чтобы предотвращать ухудшение рабочих характеристик подавления вибрации, относительно компонента вибрации бесступенчатой трансмиссии CVT.
[0116] 10) В устройстве управления демпфированием для электрического транспортного средства согласно первому варианту осуществления, когда отклонение между целевым передаточным отношением и достигаемым передаточным отношением меньше предварительно определенного значения, модуль 32 управления с обратной связью прекращает управление выходным крутящим моментом мотора MG, который вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента Tm(F/B).
Следовательно, можно продолжать операцию для того, чтобы вычитать компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, даже после того, как переключение передач завершено, чтобы предотвращать ухудшение рабочих характеристик подавления вибрации.
[0117] Устройство управления демпфирования для электрического транспортного средства настоящего изобретения описано выше на основе варианта осуществления, но его конкретные конфигурации не ограничены этим вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0118] Например, в варианте осуществления, мотор-генератор, который допускает подачу мощности и рекуперацию, показан как мотор, но ограничения на это не накладываются, и также может использоваться мотор, который допускает только подачу мощности.
Помимо этого, в варианте осуществления, гибридное транспортное средство, содержащее двигатель и мотор в качестве источников приведения в движение, показано как электрическое транспортное средство, но изобретение может применяться к электрическому транспортному средству, имеющему только мотор в качестве источника приведения в движение.
Помимо этого, в варианте осуществления, показаны примеры, в которых бесступенчатая трансмиссия используется в качестве трансмиссии; тем не менее, трансмиссия не ограничена бесступенчатой трансмиссией, и также может использоваться другая механическая трансмиссия с ручным управлением или автоматическая трансмиссия.
Дополнительно, в варианте осуществления, условие очистки в 0 для запроса операции вычитания на основе передаточного отношения/ускорения задано в качестве всего из следующего: небольшое отклонение между фактическим передаточным отношением и целевым передаточным отношением (значением команды управления), темп изменения целевого передаточного отношения (значения команды управления) меньше предварительно определенного значения и отклонения между целевым передаточным отношением (значением команды управления), и достигаемое передаточное отношение является небольшим, но ограничения на это не накладываются. Таким образом, любое одно или любые два из этих условий могут использоваться в качестве условия очистки.
Помимо этого, в варианте осуществления, предварительно определенное управление демпфированием выполняется, когда определяется то, что дифференциал второго порядка передаточного отношения превышает пороговое значение, но ограничения на это не накладываются; операция определения в отношении того, превышает или нет дифференциал второго порядка передаточного отношения пороговое значение, не обязательно требуется при условии, что компенсационный крутящий момент, соответствующий переключению передач, вычитается, и ограничена только тем, когда дифференциал второго порядка передаточного отношения превышает пороговое значение.
Помимо этого, в варианте осуществления, определение выполняется с использованием целевого передаточного отношения Ra0 в секции 330 определения запросов на ускорение/передаточное отношение; тем не менее, абсолютное значение целевого передаточного отношения Ra0 может вычисляться, и определение может выполняться на основе абсолютного значения и порогового значения.
Помимо этого, в варианте осуществления, определение выполняется с использованием целевого передаточного отношения Ra0 в секции 330 определения запросов на ускорение/передаточное отношение; тем не менее, это служит для того, чтобы выполнять более точное определение, чем использование фактического передаточного отношения RaT. Таким образом, если используется фактическое передаточное отношение RaT, требуется определение на основе значения, включающего в себя возмущения; в силу этого целевое передаточное отношение Ra0 используется в секции 330 определения запросов на ускорение/передаточное отношение. Тем не менее, тогда как целевое передаточное отношение Ra0 используется для определения в настоящем варианте осуществления, ограничения на это не накладываются, и также можно выполнять определение с использованием фактического передаточного отношения RaT.
Реферат
Изобретение относится к электромобилям. Устройство управления демпфированием для электрического транспортного средства, имеющего трансмиссию между мотором и ведущими колесами, причем устройство управления демпфированием содержит средство подавления вибрации при переключении передач. Это средство вычитает компонент компенсационного крутящего момента для подавления вибрации, вызываемой посредством переключения передач, из компенсационного крутящего момента для подавления вибрации, вызываемой посредством возмущений частоты вращения мотора, чтобы управлять выходным крутящим моментом мотора. Также имеется средство вычисления дифференциала второго порядка передаточного отношения трансмиссии. Средство подавления вибрации при переключении передач выполняет управление выходным крутящим моментом мотора, когда абсолютное значение дифференциала второго порядка равно или выше предварительно определенного значения. Повышается точность определения изменения передаточного отношения. 9 з.п. ф-лы, 10 ил.
Комментарии