Тороидальный тяговый привод с регулируемой скоростью - RU2603174C2
Код документа: RU2603174C2
Чертежи










Описание
Область техники
[0001] Данное изобретение относится к непрерывно регулируемым трансмиссиям, относящимся к типу трансмиссий с полностью тороидальным тяговым приводом вращения, и, в частности, к способам и устройствам для изменения передаточного отношения путем управления роликом.
Предпосылки изобретения
[0002] Существует несколько непрерывно регулируемых трансмиссий (НРТ), которые успешно проектируются и производятся в качестве трансмиссий для транспортных средств и других машин, требующих изменения передаточных отношений.
[0003] На рынке в основном представлены гидромеханические НРТ и НРТ, работающие на тяговом усилии.
[0004] В основном используются эти два основных типа тяговых устройств, однако существует также множество других предложений. В одних используется лента, проходящая между регулируемыми шкивами, в других (обычно называемых тороидальными вариаторами) используется ролик, который проходит между двумя дисками, механически обработанными с получением в них формы, обратной тороиду.
[0005] Данное изобретение относится к тороидальным вариаторам и к управлению роликами в них.
[0006] На рынке тороидальных приводов преобладают два аналогичных типа механизмов. Один обычно называют полутороидальным вариатором с одиночным роликом (ПВОР), а другой - полностью тороидальным вариатором с одиночным роликом (ПТВОР). Было разработано новое устройство, описанное в международной заявке РСТ №PCT/AU2010/001331, озаглавленной «Полностью Тороидальный Вариатор с Двойным Роликом (ПТВДР)». В этом устройстве используются два ролика, расположенные бок о бок друг с другом.
[0007] Как в ПТВОР, так и в ПВОР приводах используются спаренные диски, противолежащие поверхности которых механически обработаны с получением формы, обратной тороиду. Между дисками расположены ролики, которые катятся по поверхности обеих тороидальных полостей и могут передавать усилие и энергию от одного диска к другому. В случае полностью тороидального привода с двойным роликом указанные ролики расположены парами, при этом один ролик расположен бок о бок с другим.
[0008] Для эффективной передачи усилия используется специальная текучая среда, называемая текучей средой тягового устройства. Эта текучая среда обладает способностью становиться чрезвычайно вязкой (почти твердой) при ее сжатии между роликами и дисками. Ее способность передавать усилие определяется ее «коэффициентом трения», который аналогичен коэффициенту статического трения.
[0009] Указанные ролики могут вращаться или регулироваться так, что они контактируют с дисками в разных местах и, таким образом, при перемещении могут изменять передаточное отношение плавным образом.
[0010] В ПТВОР приводе центр вращения роликов расположен в центре тороидальной полости. В ПВОР приводе ролики расположены со смещением от центра тороида по направлению к центру вращения тороида.
[0011] В устройствах обоих типов используются различные способы вращения роликов для обеспечения изменения передаточного отношения. Обычно в них используется регулирующее давление, действующее против усилия реактивного крутящего момента, создаваемого роликами. При этом про ролики говорят, что они управляются крутящим моментом, в отличие от управления передаточным отношением.
[0012] Если управляющее давление больше, чем реактивный крутящий момент, то оно перемещает ролики в одном направлении, если меньше - ролики перемещаются в противоположном направлении. Перемещение роликов может ограничиваться кулачком или аналогичным устройством, и, таким образом, они могут вращаться с получением нового передаточного отношения.
[0013] Такой способ управления описан в заявке на патент США №20080254933 (16 октября 2008, изобретатель Brian Joseph Dutson), в патенте США №5989150 (23 ноября 1999, заявитель Jatco Corporation) и в заявке на патент США №20080009387 (10 января 2008, заявитель NSK Ltd), описания которых включены в данную заявку посредством ссылки.
[0014] В некоторых механизмах ролики управляются по отдельности (патент США №5989150), тогда как в других (заявки №20080254933 и №20080009387) они объединены.
[0015] В большинстве случаев тороидальные диски сжаты с помощью прижимного усилия, которое пропорционально передаваемому крутящему моменту и постоянной трения, называемой коэффициентом трения. Обычно имеется две тороидальные полости, причем входная полость образована двумя наружными дисками, а выходная полость проходит от боковой поверхности и в ней используются зубчатые или цепные передачи. Таким образом, отсутствует неподдерживаемое вращающее усилие и нет упорных подшипников, предназначенных для его поддержания.
[0016] В большинстве тороидальных приводов используется способ управления роликом в рамках системы поддержания реактивного крутящего момента для обеспечения перехода роликов от одного передаточного отношения к другому. При этом для поворота роликов из одного положения в другое прикладывается по существу совсем небольшое усилие. Должно быть понятно, что, когда ролики зажаты между дисками с приложением большого усилия, является практически нецелесообразным просто продвигать их скольжением по поверхности дисков для получения нового передаточного отношения.
[0017] В ПТВОР или ПВОР этот эффект управления роликом достигается с помощью способа поддержания ролика, в котором усилие реактивного крутящего момента, создаваемое роликом, воздействует на поршень, осевая линия которого проходит в целом по касательной относительно центра тороидальной полости. Когда поршень толкает ролик вперед или ролик перемещается назад к поршню, центр вращения ролика перестает проходить через центр вращения дисков. Он немедленно оказывается подвержен воздействию боковых усилий, действующих в противоположных направлениях на каждый диск, и ролик вращается. Обычно такой процесс называется управлением роликом и отвечает за чувствительность изменения передаточного отношения в непрерывно регулируемых трансмиссиях (НРТ) такого типа.
[0018] Фиг.1 и 2 изображают три ролика 1, установленные между дисками полностью тороидального вариатора (ПТВ). Выходной диск 10 прижат (не показано) к входному диску 11. Входной диск 11 приводится во вращение входным валом 12, тогда как выходной диск 10 вращает вал 13. Ролики 1 имеют полуось 2, расположенную на подшипниках 3. Подшипники 3 удерживаются в хомутообразном держателе 4.
[0019] Хомут 4 присоединен к поршню 7 через шаровое сочленение 5, 6 и вал 9. Поршень 7 ходит внутри гидравлического цилиндра 8 (фиг.2). В две камеры 14, 15 может подаваться масло под высоким давлением для уравновешивания усилия реактивного крутящего момента, создаваемого роликом 1. Несмотря на то что диски всегда вращаются в одном и том же направлении, усилие реактивного крутящего момента может действовать в обоих направлениях в зависимости от состояния (ускорения или замедления) приводимого в действие механизма.
[0020] Цилиндр 8 установлен в таком положении, что его центральная ось проходит в целом через центр тороидальной полости и в целом по касательной к окружности, образованной центром этой полости. Однако она не лежит точно в плоскости, параллельной плоскости вращения дисков, а наклонена под углом к этой плоскости в соответствии с поворотным углом 16.
[0021] Можно видеть, что входной и выходной диски 10, 11 и соответствующие валы 12, 13 вращаются в противоположных направлениях.
[0022] Можно видеть, что при нахождении в установившемся состоянии ось вращения ролика 1 проходит через ось вращения дисков 10, 11. Если ролик 1 под влиянием усилий перемещается в направлении вперед или назад, то его ось вращения больше не проходит через центр вращения дисков 10, 11 и он подвергается влиянию управляющих усилий, которые поворачивают его в положение с новым передаточным отношением.
[0023] Такое одновременное механическое воздействие достигается с помощью поворотного угла. При вращении ролика 1 под действием управляющих усилий его шаровое сочленение 5, 6 отклоняется в направлении наружу, вызывая совпадение его оси вращения с осью вращения дисков 10, 11. Когда это происходит, управляющее воздействие прекращается и ролик 1 устанавливается в стабильное положение при условии, что реактивное усилие ролика и управляющее усилие уравновешены.
[0024] Полутороидальные конструкции работают с аналогичными устройствами, но по иным механическим причинам в них не может использоваться поворотный угол. Стабильность ролика после управляющего перемещения достигается обеспечением возможности перемещения ролика 1 назад в центральное положение путем перенастройки управляющего давления, которое противодействует реактивному усилию ролика. Шаговый двигатель и кулачок распознают, где находится ролик 1, и выполняют непрерывное регулирование управляющих давлений с помощью контура обратной связи. Контуры обратной связи всегда подвержены возникновению показателей, выходящих за заданные пределы, что приводит к вибрациям или нерегулярным колебаниям. Для устранения таких вибраций часто требуются сложные демпфирующие системы, которые неприемлемы в большинстве областях использования трансмиссионных устройств.
[0025] В этих известных примерах все ролики 1 могут свободно принимать независимые положения с различными передаточными отношениями. Однако указанные положения, которые они принимают, по существу являются положениями, в которых они все испытывают одинаковое усилие реактивного крутящего момента, так как оно уравновешено поршнями 9 равного размера, которые все подвержены воздействию одинакового гидравлического давления текучей среды. Такое уравновешенное позиционирование обеспечивает состояние, при котором все ролики 1 принимают на себя равную долю переданной мощности. Вследствие этого отсутствует теоретическая возможность нахождения роликов 1 вне положения передаточного отношения. Однако упругость, присущая гидравлическим текучим средам и каналам, по которым они проходят, может вызвать колебания, которые трудно подавить.
[0026] При такой форме управления положением ролика существуют и другие проблемы. Во-первых, поскольку ролики 1 поддерживаются усилием, создаваемым активной гидравлической системой, постоянно требуется энергия для создания гидравлического давления. Активная гидравлическая система должна быть достаточно велика для того, чтобы быстро перемещать ролики 1, и поэтому размер системы становится довольно значительным, что требует уровня энергии, который зачастую может составлять 2%-4% от энергии, проходящей через НРТ.
[0027] Имеется большое количество прецизионных элементов, связанных с системой поддержки, и гидравлических регуляторов, связанных с гидравлической системой.
[0028] Существуют механические ограничения, ограничивающие угол, на который может поворачиваться ролик 1, что, в свою очередь, ограничивает итоговый диапазон изменения передаточных отношений. Обычно максимальный диапазон изменения передаточного отношения для ПТВОР составляет 6:1. Это также ограничивает расстояние, на которое центр ролика может быть отнесен от оси вращения диска, что, в свою очередь, уменьшает его эффективность.
[0029] Другой подход к потребности «управлять» роликами с получением новых передаточных отношений описан в патенте США №6866609, применяемом к ПВОР.
[0030] Целью данного изобретения является создание управляющего механизма, который контролирует положение роликов механическим образом без необходимости в гидравлических средствах и таким способом, который обеспечивает возможность управления ими с переходом к новым передаточным отношениям без необходимости приложения большого усилия.
[0031] Еще одной целью является создание управляющего механизма, который точно объединяет вместе все ролики с обеспечением присвоения им новых передаточных отношений без какой-либо вероятности возникновения колебаний, возбуждаемых явлениями упругости.
[0032] Еще одной целью данного изобретения является уменьшение потерь энергии в приводной системе роликов.
[0033] Еще одной целью изобретения является повышение эффективности вариатора путем расположения центра ролика дальше от оси вращения диска с обеспечением уменьшения величины разности скоростей в точках контакта.
[0034] Еще одной целью изобретения является увеличение диапазона изменения передаточного отношения вариатора путем обеспечения возможности поворота ролика на больший угол с получением большей разницы в расстояниях, на которые точки контакта удалены от оси вращения дисков.
[0035] Еще одной целью изобретения является увеличение числа роликов, которые могут быть расположены в тороидальной полости, путем создания большей разницы в расстояниях, на которые точки контакта удалены от оси вращения дисков.
Сущность изобретения
[0036] В соответствии с первым аспектом данного изобретения предложен тороидальный тяговый привод с регулируемой скоростью, содержащий: ведущий диск и ведомый диск, имеющие общую ось вращения, причем внутренняя поверхность каждого диска отформована с получением формы, обратной тороиду, роликовые блоки, которые расположены между указанными дисками и каждый из которых содержит ролик, причем указанные диски совместно поджаты к расположенным между ними роликовым блокам прижимным усилием, и каждый ролик каждого блока контактирует с каждым диском в точках контакта, при этом каждый роликовый блок соединен с соответствующей поворачиваемой цапфой, каждая цапфа имеет ось поворота, которая проходит через тороидальную полость, образованную противолежащими отформованными внутренними поверхностями дисков, и при повороте цапфы вокруг ее оси поворота цапфа прикладывает управляющее усилие к соответствующему роликовому блоку в точке, относящейся к соответствующему блоку, при этом приложенное управляющее усилие обеспечивает управление роликом соответствующего блока и присвоение ему других точек контакта, причем точка, в которой приложено управляющее усилие, расположена со смещением от оси поворота цапфы на фиксированное расстояние и со смещением от линии, пересекающей точки контакта.
[0037] В соответствии с еще одним аспектом данного изобретения предложен тороидальный тяговый привод с регулируемой скоростью, содержащий: ведущий диск и ведомый диск, имеющие общую ось вращения, причем внутренняя поверхность каждого диска отформована с получением формы, обратной тороиду, роликовые блоки, которые расположены между указанными дисками и каждый из которых содержит ролик, причем указанные диски совместно поджаты к расположенным между ними парам роликовых блоков прижимным усилием, а пара роликов в каждой паре роликовых блоков расположена с обеспечением качения друг по другу, при этом один ролик контактирует с ведущим диском в первой точке контакта, а другой ролик контактирует с ведомым диском во второй точке контакта, каждый роликовый блок в каждой паре блоков соединен с соответствующей поворачиваемой цапфой, причем каждая цапфа имеет ось поворота, которая проходит через тороидальную полость, образованную противолежащими отформованными внутренними поверхностями дисков, и при повороте цапфы вокруг ее оси поворота цапфа прикладывает управляющее усилие к соответствующей паре роликовых блоков в соответствующих точках, относящихся к каждому блоку в указанной паре, при этом приложенное управляющее усилие обеспечивает управление роликами в соответствующей паре блоков и присвоение ему других первой и второй точек контакта, причем каждая соответствующая точка, в которой приложено управляющее усилие, расположена со смещением от оси поворота цапфы на фиксированное расстояние и со смещением от линии, пересекающей первую и вторую точки контакта.
Краткое описание чертежей
[0038] Ниже приведено описание предпочтительных вариантов выполнения изобретения со ссылкой на чертежи, на которых:
[0039] фиг.1 изображает схематический вид сверху примера известного тороидального вариатора,
[0040] фиг.2 изображает вид сбоку известного тороидального вариатора, показанного на фиг.1,
[0041] фиг.3 изображает схематический вид сверху тороидального вариатора согласно первому варианту выполнения данного изобретения,
[0042] фиг.4 изображает схематические виды двух отдельных цапфенно-роликовых блоков вариатора, показанного на фиг.3,
[0043] фиг.5 схематически изображает вид сбоку вариатора, показанного на фиг.3,
[0044] фиг.6 изображает виды сверху и сбоку отдельного цапфенно-роликового блока вариатора, показанного на фиг.3,
[0045] фиг.7 изображает альтернативный вариант выполнения отдельного цапфенно-роликового блока,
[0046] фиг.8 изображает схематический вид сверху тороидального вариатора согласно альтернативному варианту выполнения данного изобретения, который содержит цапфенно-роликовый блок, показанный на фиг.7,
[0047] фиг.9 изображает схематический вид сбоку цапфы, показанной фиг.7,
[0048] фиг.10 изображает схематический вид альтернативного варианта выполнения вариатора, в котором используются пары роликов,
[0049] фиг.11 изображает вид сверху парных роликовых блоков вариатора, показанного на фиг.10,
[0050] фиг.12 изображает схематический вид сверху вариатора, показанного на фиг.10,
[0051] фиг.13 изображает виды устройства из цапфы и сдвоенного ролика, которое входит в состав вариатора, показанного на фиг.10,
[0052] фиг.14 изображает виды альтернативного варианта выполнения отдельного цапфенно-роликового блока.
Подробное описание изобретения
[0053] В первом отдельном варианте выполнения изобретения три одиночных ролика расположены в типовой тороидальной полости, как в рассмотренном выше уровне технике.
[0054] Фиг.3 изображает вид сверху такого устройства, в котором ролики 1 установлены на полуоси 2 на подшипниках 3 и удерживаются в хомуте 4, как и прежде. На одном конце хомута расположен шар 5, заключенный в кожух 27. Кожух шара установлен внутри одного конца цапфы 28.
[0055] На каждом конце цапфы 28 выполнена полуось 29 и 30, которая установлена в кожухе 38 корпуса так, что цапфа 28 может свободно поворачиваться. Центральная ось цапфы 28 проходит через центр тороидальной полости.
[0056] Можно легко видеть, что не имеется механических ограничений в отношении угла, на который может поворачиваться ролик 1 для получения различных передаточных отношений. Благодаря этому можно получать диапазоны передаточных отношений, превышающие 20:1. Также благодаря этому можно разместить ролики 1 на большом расстоянии от центральной оси при одновременном поддержании приемлемого передаточного отношения, что позволяет встроить в конструкцию четыре ролика, также работающих более эффективно.
[0057] Цапфы 28 имеют выступ 26, снабженный зацепляющимися шестернями 31, так что каждая цапфа 28 должна поворачиваться на своих поддерживающих полуосях 29, 30 согласованно с двумя другими цапфами.
[0058] Одна из цапф также снабжена другой шестерней 33, которая может поворачиваться с помощью реечной передачи (или аналогичного исполнительного средства), расположенной в исполнительном устройстве 32.
[0059] Фиг.4 изображает две цапфы, извлеченные из кожуха, с ясно показанными корпусом 28 цапфы, выступающими полуосями 29 и 30, шестернями 31, шаром 5 и кожухом 27 шара.
[0060] Хомут 4, поддерживающий ролик 1, может свободно поворачиваться на шаре 5 и кожухе 27, так что ролик 1 может управлять своим перемещением в тороидальной полости. Другими словами, может происходить переориентация роликового блока по отношению к цапфе вокруг шара 5. В цапфе, изображенной в правой части фиг.4, ролик 1 повернут на 1,2 градуса.
[0061] Фиг.5 изображает схематический разрез через тороидальную полость. В левой части чертежа разрез проходит через центр ролика 1 и корпус 28 цапфы, при этом ролик 1 находится в среднем положении или положении 1:1 и удерживается между входным и выходным дисками 10, 11.
[0062] В правой части чертежа показан схематический вид с торца цапфы 28, изображающий конец полуоси 30, вид сбоку шестерен 31, корпус 28 цапфы и положение шара 5, смещенное от полуоси 30 вследствие поворотного смещения 35.
[0063] При повороте цапфы 28 вокруг ее оси центр шара 5 описывает дугу 37. Кожух 27, присоединенный к хомуту 4, вынужден следовать за шаром 5 и, таким образом, поворачивает ролик 1, что приводит к управлению им. Степень управления зависит от угла поворота цапфы 28 и относительной величины поворотного смещения 35 и управляющего смещения 36.
[0064] Если поворот цапфы 28 происходит по часовой стрелке (как видно на фиг.4) и входной диск 11 вращается так, как показано на чертеже, то ролик 1 поджимается по направлению к положению с более низким передаточным отношением, при этом входная точка контакта перемещается ближе к центральной оси вращения. Будучи поджатым в этом направлении, он поворачивается вследствие перемещения шара 5 под влиянием поворотного смещения 35 и управляющего смещения 36 с обеспечением направления к центру. В выходной точке контакта управляемое перемещение направлено наружу, поскольку вращение диска 10 происходит в противоположном направлении.
[0065] Когда вращение ролика «синхронизируется» с вращением цапфы, управляющее действие сокращается до нуля, и ролик 1 опять оказывается в положении, в котором его ось вращения проходит через главную ось.
[0066] При повороте цапфы 28 в противоположном направлении происходит обратное перемещение.
[0067] Теперь управляющее действие связано непосредственно с поворотом цапфы 28. Ролик 1 не переводится принудительно в положение с новым передаточным отношением, что требует приложения большого крутящего усилия к ролику 1, а управляемо направляется к этому положению.
[0068] Фиг.6 показывает взаимосвязь между поворотным смещением 35 и поворотным сдвигом 36 с другой точки зрения.
[0069] Точки 38, 39 на ролике 1 представляют собой входную и выходную точки контакта. Несмотря на то что диски 10, 11 и ролики 1 вращаются, эти точки фиксированы в пространстве, и ролик 1 не может быть смещен от них без приложения некоторого усилия. Однако если ролик поворачивается (происходит его управляемое перемещение), то точка 38 сместится в одном направлении, а точка 39 - в другом.
[0070] В конфигурации такого типа, в типовом приводе с внутренним диаметром 100 мм, вращающимся со скоростью 1000 об/мин на входе, управляющий угол величиной 2 градуса приведет к повороту ролика с переходом от большого передаточного отношения к малому передаточному отношению менее чем за 0,25 секунды.
[0071] Фиг.7, 8 и 9 изображают другую конфигурацию поворотного смещения и поворотного сдвига, при которой поворотный сдвиг 36а сведен внутрь и его величина определяется относительно поворотного смещения 35а.
[0072] Теперь ролик 1 установлен на подшипнике большего диаметра, в котором заключен корпус с размещенными в нем шаром 5 и кожухом 27 шара.
[0073] Шар 5 теперь установлен непосредственно на цапфе 28.
[0074] Это более компактный механизм, но он требует большей механической точности для обеспечения поддержания ролика 1 внутри тороидальной полости в том же относительном положении, что и другие ролики.
[0075] Фиг.14 изображает еще одну альтернативную конфигурацию. В этой альтернативной конфигурации цапфа 28 содержит двусторонний смещенный управляющий кулачок 60, который воздействует непосредственно на наружный край ролика 1 при повороте цапфы 28. В этом случае ролик 1 установлен с возможностью вращения на подшипнике 63. Подшипник 63 установлен на своей оси вращения на шаровом сочленении 62. Шаровое сочленение 62 неподвижно прикреплено к цапфе 28 на выступе 61. Как и прежде, роликовый блок может изменять ориентацию по отношению к цапфе 28 вследствие поворота вокруг шарового сочленения 62. При повороте цапфы 28 относительно ее оси 64, управляющий кулачок 60 контактирует с роликом 1 в точке, которая смещена (управляющее смещение 36) от линии, пересекающей точки 38, 39 контакта, и смещена от оси 64 вращения цапфы (поворотное смещение 35) с обеспечением, таким образом, управления роликом 1.
[0076] В другом предпочтительном варианте выполнения комбинация из цапфы, хомута и смещенного шарового сочленения применяется в полностью тороидальном вариаторе со сдвоенными роликами, как описано в международной заявке РСТ №PCT/AU2010/001331, описание которой включено в данный документ посредством ссылки.
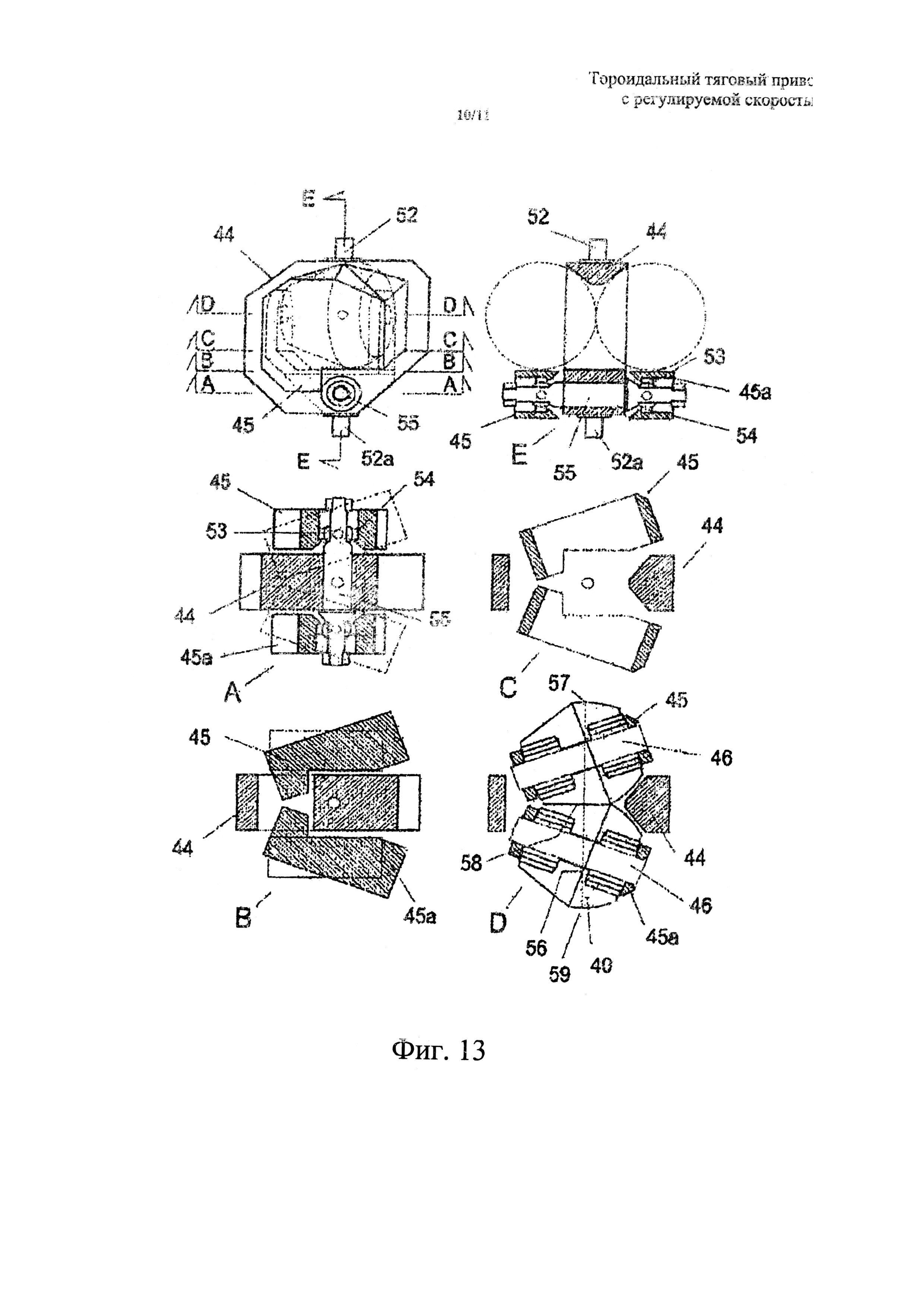
[0077] В этом устройстве внутри тороидальной полости расположена пара роликов 40, имеющих тороидальную поверхность, на которой они катятся по тороидальной поверхности дисков, и коническую поверхность, на которой они катятся друг по другу.
[0078] Фиг.10 изображает разрез такого варианта выполнения.
[0079] Сдвоенные ролики имеют тороидальную поверхность, катящуюся по входным дискам 41 и 42 и спаренным выходным дискам 43, и коническую поверхность, катящуюся одна по другой. Ролики опираются на полуоси 46, проходящие через хомуты 45, которые соединены с цапфами 44 шарнирным сочленением.
[0080] К каждой цапфе 44 прикреплено червячное зубчатое колесо 47, взаимодействующее с четырехходовым червячным винтом 48 трубчатой формы, который проходит из одной тороидальной полости в следующую с получением коаксиальной конструкции с другой трубой 49, действующей в качестве опоры для пластины, которая поддерживает полуось 52 цапфы, изображенную на фиг.12 и 13.
[0081] Ролик и наклонное средство 50 действуют с обеспечением сжатия дисков вместе при передаче крутящего момента, создаваемого входным валом 51 и передаваемого к внутреннему валу 51а.
[0082] Крутящий момент передается от диска 43 к куполообразному кожуху 52, а затем к выходному валу 52а.
[0083] Фиг.11 изображает вид сверху сдвоенных роликов, установленных в соответствующих хомутах 45 на полуосях 46. Цапфы не показаны. На данном чертеже ролики установлены в таком положении, что при вращении они обеспечивают либо высокое, либо низкое передаточное отношение на выходе НРТ.
[0084] Фиг.12 изображает вид цапф 44, используемых для поддержания хомутов (не показаны) на шаровых сочленениях, прикрепленных к валам 55. Цапфы закреплены на месте на полуосях 52, которые обеспечивают возможность их поворота на соответствующих осях. Поддерживающий диск вал 51а показан проходящим через центр и окружен опорной трубой 49 и четырехходовым червячным винтом 48. Указанный винт взаимодействует с червячным колесом 47, обеспечивая синхронный поворот всех четырех цапф 44.
[0085] На фиг.13 подробно показаны цапфа, хомут и шаровое сочленение, относящиеся к полностью тороидальному вариатору со сдвоенными роликами, показанному на фиг.10, 11 и 12.
[0086] Вид сверху цапфы 44 изображен в разрезах в положениях А-А, В-В, С-С, D-D, и Е-Е. Полуоси 52 и 52а цапфы выступают из обоих концов и поддерживаются внутри корпуса собранной НРТ. Опора 55 шарикового подшипника проходит через цапфу 44 с обеспечением поддержания обоих хомутов 45.
[0087] Разрез Е показывает расположение сдвоенных роликов относительно цапфы 44 и ее полуосей 52 и 52а. Шариковые подшипники 53 и их кожух 54 закреплены в хомутах 45 и 45а.
[0088] Разрез А проходит через те же компоненты и в том же положении, но в другом направлении по сравнению с разрезом Е. Форма хомутов 45 и 45а имеет одну часть, в целом совмещенную с цапфой 44, и разветвленную часть, выровненную относительно полуосей ролика.
[0089] Разрез В проходит через цапфу 44 и два хомута 45 и 45а в местоположении, в котором хомут представляет собой целую часть и еще не разветвляется ввиду необходимости поддержки ролика.
[0090] Разрез С проходит через хомуты в местоположении, в котором они имеют разветвленную форму.
[0091] Разрез D проходит через центр роликов и изображает полуоси роликов 46 и 46а, которые закреплены в хомутах 45 и 45а. Пунктирная линия 56 представляет линию силы, которая проходит от одного контакта 57 ролика с диском через конический контакт 58 к другому контакту 59 ролика с диском.
[0092] Можно видеть, что при повороте цапфы 44 сдвоенные ролики вращаются вокруг линии 56, один в одном направлении, а другой - в противоположном, при этом хомут поворачивается на шариковом подшипнике. Ось вращения роликов больше не проходит через ось вращения дисков, и ролики начинают устанавливаться поперек поверхности дисков. Так как оба диска вращаются в одном и том же направлении, это приводит к тому, что один ролик управляемо перемещается поперек входного диска в одном направлении, а другой управляемо перемещается поперек выходного диска в другом направлении. Управление прекращается после того, как хомуты повернутся обратно на шариковом подшипнике в достаточной степени для того, чтобы ось вращения ролика снова проходила через ось вращения диска.
Реферат
Изобретение относится к непрерывно регулируемым трансмиссиям. Тороидальный тяговый привод с регулируемой скоростью содержит ведущий диск (11) и ведомый диск (10). Диски (10, 11) имеют общую ось вращения. Внутренняя поверхность каждого диска (10, 11) отформована с получением формы, обратной тороиду. Кроме того, привод содержит роликовые блоки, которые расположены между дисками (10, 11) и каждый из которых содержит ролик (1). Диски (10,11) совместно поджаты к расположенным между ними роликовым блокам прижимным усилием. Каждый блок соединен с соответствующей поворачиваемой цапфой (28). При повороте цапфы (28) вокруг ее оси поворота цапфа (28) прикладывает управляющее усилие к соответствующему роликовому блоку в точке (38, 39), относящейся к соответствующему блоку. Приложенное управляющее усилие обеспечивает управление роликом (1) соответствующего блока и присвоение ему других точек (38, 39) контакта, причем точка, в которой приложено управляющее усилие, расположена со смещением от оси поворота цапфы на фиксированное расстояние и со смещением от линии, пересекающей точки (38, 39) контакта. Достигается увеличение диапазона изменения передаточного отношения. 2 н. и 14 з.п. ф-лы, 14 ил.
Формула
ведущий диск (11) и ведомый диск (10), которые имеют общую ось вращения и внутренняя поверхность каждого из которых отформована с получением формы, обратной тороиду, так что противолежащие внутренние поверхности дисков (10, 11) образуют между собой тороидальную полость,
роликовые блоки, которые расположены между указанными дисками (10, 11) и каждый из которых содержит ролик (1), причем указанные диски (10, 11) совместно поджаты к расположенным между ними роликовым блокам прижимным усилием, и каждый ролик (1) каждого блока контактирует с каждым диском (10, 11) в точках (38, 39) контакта, при этом передача усилия обеспечивается благодаря использованию текучей среды тягового устройства, причем указанная текучая среда сжимается между роликами роликовых блоков и дисками в точках контакта,
при этом каждый роликовый блок соединен с соответствующей поворачиваемой цапфой (28), каждая цапфа (28) имеет ось поворота, которая проходит через тороидальную полость, и при повороте цапфы (28) вокруг ее оси поворота цапфа (28) прикладывает управляющее усилие к соответствующему роликовому блоку в точке, относящейся к соответствующему блоку, при этом приложенное управляющее усилие обеспечивает управление роликом (1) соответствующего блока и присвоение ему других точек контакта (38, 39), причем точка, в которой приложено управляющее усилие, расположена со смещением от оси поворота цапфы на фиксированное расстояние и со смещением от линии, пересекающей точки контакта.
ведущий диск (41, 42) и ведомый диск (43), которые имеют общую ось вращения и внутренняя поверхность каждого из которых (41, 42, 43) отформована с получением формы, обратной тороиду, так что внутренние поверхности дисков (41, 42, 43) образуют между собой тороидальную полость,
роликовые блоки, которые расположены между указанными дисками и каждый из которых содержит ролик (40), причем указанные диски (41, 42, 43) совместно поджаты к расположенным между ними парам роликовых блоков прижимным усилием, и пара роликов (40) в каждой паре роликовых блоков расположена с обеспечением качения друг по другу, при этом один ролик контактирует с ведущим диском (41, 42) в первой точке (38) контакта, а другой ролик контактирует с ведомым диском (43) во второй точке (39) контакта, при этом передача усилия обеспечивается благодаря использованию текучей среды тягового устройства, причем указанная текучая среда сжимается между роликами роликовых блоков и дисками в точках контакта,
при этом каждый роликовый блок в каждой паре блоков соединен с соответствующей поворачиваемой цапфой (44), каждая цапфа (44) имеет ось поворота, которая проходит через тороидальную полость, образованную противолежащими отформованными внутренними поверхностями дисков (41, 42, 43), и при повороте цапфы (44) вокруг ее оси поворота цапфа (44) прикладывает управляющее усилие к соответствующей паре роликовых блоков в соответствующих точках, относящихся к каждому блоку в указанной паре, при этом приложенное управляющее усилие обеспечивает управление роликами (40) в соответствующей паре блоков и присвоение ему других первой и второй точек контакта, причем каждая соответствующая точка, в которой приложено управляющее усилие, расположена со смещением от оси поворота цапфы на фиксированное расстояние и со смещением от линии, пересекающей первую и вторую точки контакта.
Документы, цитированные в отчёте о поиске
Приводной механизм для бесступенчатой коробки передач
Комментарии