Устройство отбора мощности для транспортного средства - RU2411406C2
Код документа: RU2411406C2
Чертежи
Описание
Настоящее изобретение относится к устройствам отбора мощности для транспортных средств.
Применяемый здесь термин «устройство отбора мощности» относится к устройствам, предназначенным для передачи приводного усилия вращения от двигателя (или другого вращательного привода, такого как электродвигатель) транспортного средства к какой-либо точке использования, иной, чем ведомые колеса транспортного средства. Сокращенно этот термин будет выражен как «РТО». Сельскохозяйственные транспортные средства, такие как трактора, обычно оборудуются РТО для соединения с ведомыми приспособлениями, такими как жатки, сенокосилки, прицепы с ведомыми колесами и тому подобное. Обычно РТО состоит из приводного вала, соединенного с двигателем передачей определенного вида, и снабжено средством для формирования разъемного соединения с валом приспособления. РТО применяют не только на сельскохозяйственных транспортных средствах. Военные транспортные средства также используют РТО для осуществления приведения в движение прицепов с ведомыми колесами и других средств, и кроме того, существуют другие области, в которых РТО находят или могут находить применение.
Обычные сельскохозяйственные РТО обычно предназначены для работы на постоянной скорости. Коробка передач с постоянным передаточным числом, обычно отделенная от передачи транспортного средства, обеспечивает одно или ряд передаточных чисел, а дизельный двигатель с регулируемыми оборотами настроен на постоянную скорость для обеспечения требуемой частоты вращения на выходе РТО. Между двигателем и РТО требуется наличие муфты зацепления для разделения их в случае, когда не требуется привода РТО.
Эти обычные технические решения РТО страдают от ряда недостатков. С одним из них сталкиваются при «запуске», т.е. при приложении мощности привода на выходе РТО для его разгона из положения простоя до требуемой рабочей скорости. Ведомое приспособление часто обладает большим моментом инерции и нуждается в разгоне в течение значительного периода времени для достижения своей рабочей скорости. Когда впервые вводится в действие муфта, несовпадение между частотой вращения двигателя и вала РТО ведет к возникновению внезапного и нежелательного резкого толчка и может вызвать остановку двигателя. Операторы научились повторять зацепление и расцепление муфты для осуществления запуска, что является грубым подходом, который может привести к повреждению оборудования. Желательным может быть более контролируемый запуск.
Другая проблема возникает в отношении прицепов с ведомыми колесами. Многие сельскохозяйственные и военные транспортные средства передают приводное усилие на колеса прицепа путем отбора мощности, что помогает транспортному средству, например, пересечь неровную местность. Скорость вращения на грунте у колес прицепа не всегда равна скорости вращения ведомых колес транспортного средства. При движении на повороте, например, различные колеса описывают пути с различными радиусами и, таким образом, пересекают грунт с различной частотой вращения. Относительная частота вращения колес, однако, является фиксированной за счет передаточных чисел, которые обеспечивает ведущая их передача (передачи), когда обычно не предусматривается наличие дифференциальной передачи. В результате неизбежным становится проскальзывание колес, которое сопровождается очень большой и нежелательной рециркуляцией мощности через передачу (передачи). Несмотря на прочность сельскохозяйственных транспортных средств, в результате происходят дорогостоящие поломки. Проблема возникает не только при повороте, но также из-за несовпадения размеров колес, неровности грунта и т.д. Было бы желательно предложить некоторые средства привода РТО, которые позволяли бы согласовывать их частоту вращения с частотой вращения ведомых колес транспортного средства, обеспечивая при этом необходимый крутящий момент колес прицепа.
Другая проблема известных вариантов РТО касается энергетического кпд. Обычно постоянные передаточные числа выбирают на основании того, что двигатель работает с большой частотой вращения, такой как позволяющая обеспечить получение максимальной мощности или близкого к ней значения. Это имеет место для того, чтобы можно было передать на ведомое приспособление необходимую высокую мощность без отклонения от требующейся приводной скорости. В результате даже в случае, когда для приспособления требуется относительно низкая мощность, двигатель должен работать с той же постоянной частотой вращения, что ведет к ненужному расходу топлива.
Конечная трудность возникает при варьировании нагрузки на РТО. Примером может служить использование силосоуборочного комбайна, приспособления, которое устанавливают на транспортное средство для сбора измельченного материала и которое потребляет большую мощность. Когда силосоуборочный комбайн оказывается на особенно плотно заросшем участке, возрастает крутящий момент, требующийся для его привода. Мощность, которая требуется для поддержания частоты вращения РТО, может превышать получаемую от двигателя. В этой ситуации желательно допустить замедление РТО вместо того, чтобы остановить двигатель. Предпочтительно при этом нужно поддерживать высокую частоту вращения двигателя для получения высокой мощности двигателя.
Ранее предлагалось использовать бесступенчато регулируемую передачу, т.е. передачу, способную выполнять бесступенчатое изменение передаточного числа, для привода РТО. Ссылка в этом отношении относится к опубликованной международной заявке на Патент US2003/0070819, заявке № 10/236589 на имя Храздера. В ней описываются преимущества, которые обеспечивают использование бесступенчато-регулируемой передачи (CVT), такие как улучшенный запуск и гибкость в частоте вращения приводного двигателя. Сохраняются проблемы, связанные с управлением. Например, обычная СVT сама по себе не защищает двигатель от остановки в случае избыточной нагрузки.
Поиски, проведенные Европейским патентным агентством в отношении настоящего изобретения, содержат ссылку на ЕР 1106870 (Kawasaki Jukogu Kabushiki Kaisha). В нем описано устройство, предназначенное для привода авиационного генератора от реактивного двигателя с постоянной частотой вращения. В устройстве для регулирования частоты вращения генератора используется частично или полностью тороидальный вариатор, но очевидно, что он является устройством с регулируемым передаточным числом. Ссылка обращена в этом отношении на фиг. 10 в соответствующем описании изобретения в параграфе 55. В том же поиске привлекли внимание к патенту США № 4186616 (Шарп), который также касается передачи, предназначенной для привода авиационного генератора переменного тока. Здесь используется вариатор тороидального типа, но не указано, является ли крутящий момент регулируемым. Конечно, привод генератора переменного тока в самолете не является устройством отбора мощности, предназначенным для транспортного средства в том смысле, в котором применяется здесь этот термин.
Согласно первому аспекту настоящего изобретения, предлагается устройство привода для отбора мощности (РТО) транспортного средства, которое содержит вал РТО, сконструированный и выполненный с возможностью соединения с приспособлением с механическим приводом, входной вал, сконструированный и выполненный с возможностью соединения с вращательным приводом, и бесступенчато-регулируемую передачу, присоединенную между входным валом и валом РТО для передачи приводного усилия между ними при бесступенчато-регулируемом передаточном числе, отличающееся тем, что бесступенчато-регулируемая передача сконструирована и выполнена с возможностью регулирования реактивного крутящего момента и автоматического компенсирования изменения частоты вращения на валу РТО посредством изменения его передаточного числа.
Вращательным приводом может быть двигатель внутреннего сгорания, в частности дизельный двигатель, но изобретение по своему замыслу применимо к транспортным средствам, в которых вместо этого используют для обеспечения привода вращения электродвигатели, двигатели внешнего сгорания и т.д.
Особенно предпочтительным является то, что передача содержит блок изменения передаточного числа («вариатор»), который имеет вращательный вход вариатора и вращательный выход вариатора и сконструирован и выполнен с возможностью регулирования реактивного крутящего момента, который определяется как сумма крутящих моментов на его входе и выходе. Этот вид функциональных возможностей может быть обеспечен путем использования тороидального вариатора с силовыми роликами.
Предпочтительно, чтобы вариатор был связан с регулятором, предназначенным для регулирования реактивного крутящего момента для получения постоянной частоты вращения РТО при нормальной работе. Термин «нормальный», который используется в этом контексте, исключает запуск, при котором частота вращения РТО должна, конечно, последовательно изменяться, и условия, при которых нагрузка на РТО становится избыточной. Регулирование реактивного крутящего момента может основываться на обратной связи с частотой вращения вала РТО.
Настоящее изобретение обеспечивает особые преимущества при разрешении ситуаций, при которых нагрузка РТО становится избыточной, что может при известных устройствах РТО привести к перегрузке двигателя и вызвать его остановку. Естественной реакцией на такую перегрузку передачи, регулирующей крутящий момент, является обеспечение замедления вала РТО за счет изменения передаточного числа, что уменьшает потребляемую мощность двигателя (не заставляя его изменить частоту вращения, так что мощность двигателя может поддерживаться на прежнем уровне) и повышает крутящий момент на валу РТО. На практике реакция передачи является в точности такой, какая требуется для поддержания должного функционирования приспособления с приводом от РТО и двигателя. Ситуация несколько усложняется в случае, когда, например, предлагается регулятор, стремящийся поддерживать частоту вращения вала РТО. В этом случае порядок действия регулятора предпочтительно несколько изменяется в ответ на возможную перегрузку.
Регулятор предпочтительно ограничивает реактивный крутящий момент для избежания избыточной нагрузки на двигатель, так что в ответ на избыточную нагрузку, приложенную к валу РТО, регулятор ограничивает реактивный крутящий момент и замедляет вращение вала РТО за счет того, что приложенная к нему нагрузка автоматически компенсируется посредством изменения передаточного числа вариатора.
Особенно предпочтительным является то, что передача дополнительно содержит планетарную шунтирующую зубчатую передачу, функционально соединенную с вариатором и РТО.
В одном таком варианте осуществления соответствующие входы шунтирующей зубчатой передачи соединены с входным валом через вариатор и через зубчатую цепь с постоянным передаточным числом, так что при определенном передаточном числе вариатора два параллельных входа уравновешивают друг-друга и обеспечивают нейтральное положение с зацеплением, при котором вал РТО остается неподвижным несмотря на то, что он механически соединен с движущимся входным валом. В некоторых таких вариантах осуществления возможен отказ от муфты, предназначенной для отсоединения РТО от входного вала.
Без муфты желательно обеспечить определенным образом «нейтральное» состояние, при котором вал может вращаться свободно. Такой результат тоже можно получить с помощью настоящего изобретения. Предпочтительные варианты осуществления содержат средства сведения реактивного крутящего момента вариатора к нулю и обеспечения таким образом квазинейтрального состояния, при котором вал РТО может вращаться свободно несмотря на то, что он механически соединен с входным валом.
Предпочтительно предусмотрены средства регулирования запуска РТО из квазинейтрального состояния путем повышения реактивного крутящего момента вариатора для создания приводного крутящего момента на валу РТО, в то время как вариатор автоматически компенсирует последующее ускорение вала РТО за счет изменений передаточного числа.
Согласно второму варианту настоящего изобретения предложен способ регулирования отбора мощности транспортного средства, содержащего вал РТО, сконструированный и выполненный с возможностью соединения с приспособлением с механическим приводом, входной вал, сконструированный и выполненный с возможностью соединения с вращательным приводом, и бесступенчато-регулируемую передачу, присоединенную между входным валом и валом РТО для передачи приводного усилия между ними, при котором регулируют реактивный крутящий момент передачи и изменяют передаточное число передачи согласно изменениям частоты вращения на выходе, вызванным применением крутящего момента на выходе следующей передачи к инерционной нагрузке, относящейся к валу РТО.
Далее будут описаны конкретные варианты осуществления настоящего изобретения, приведенные исключительно в качестве примеров, со ссылкой на прилагаемые чертежи, на которых:
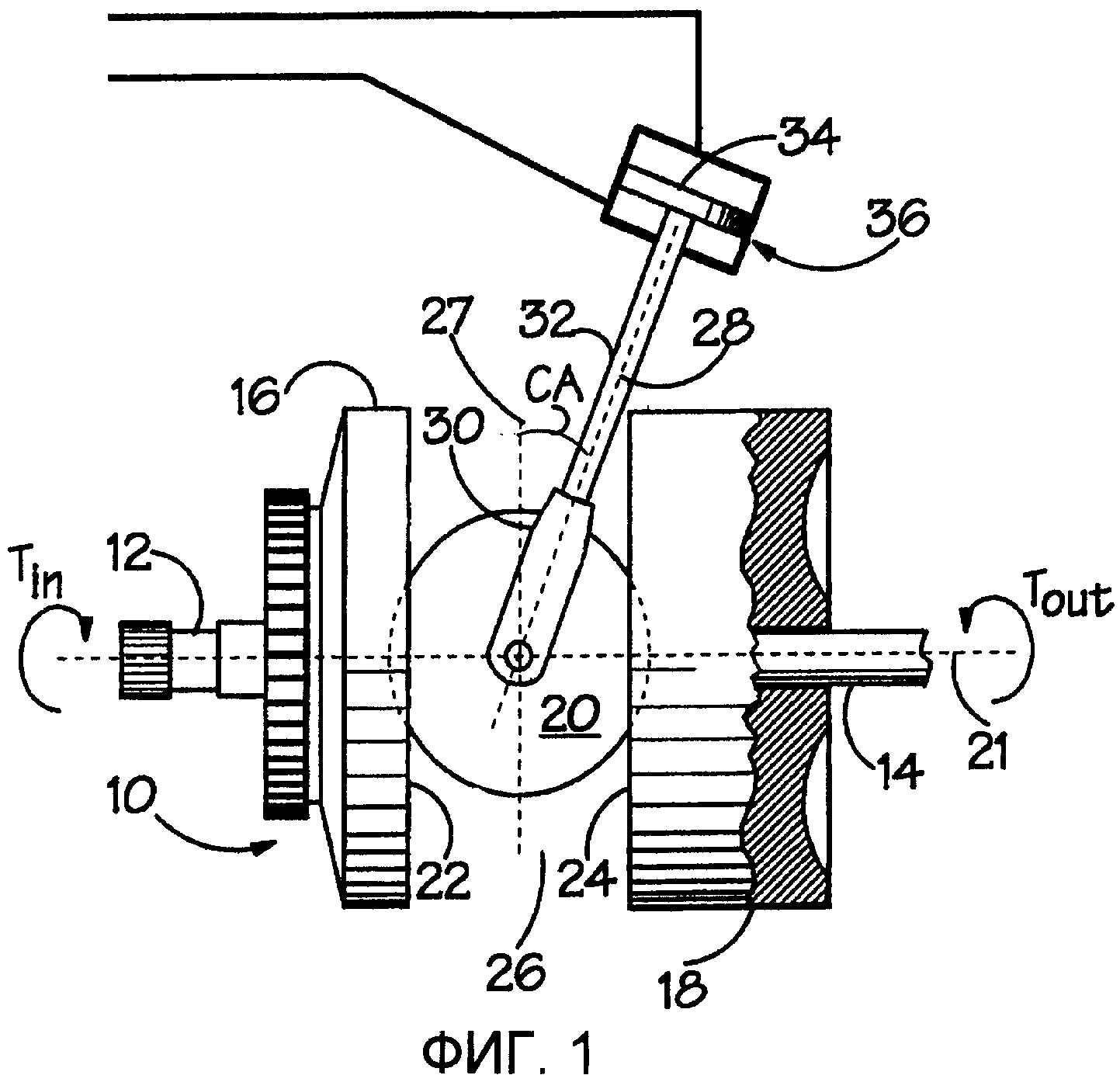
фиг.1 представляет собой схематическое и упрощенное представление части тороидального вариатора с силовыми роликами, применяемого в вариантах осуществления настоящего изобретения;
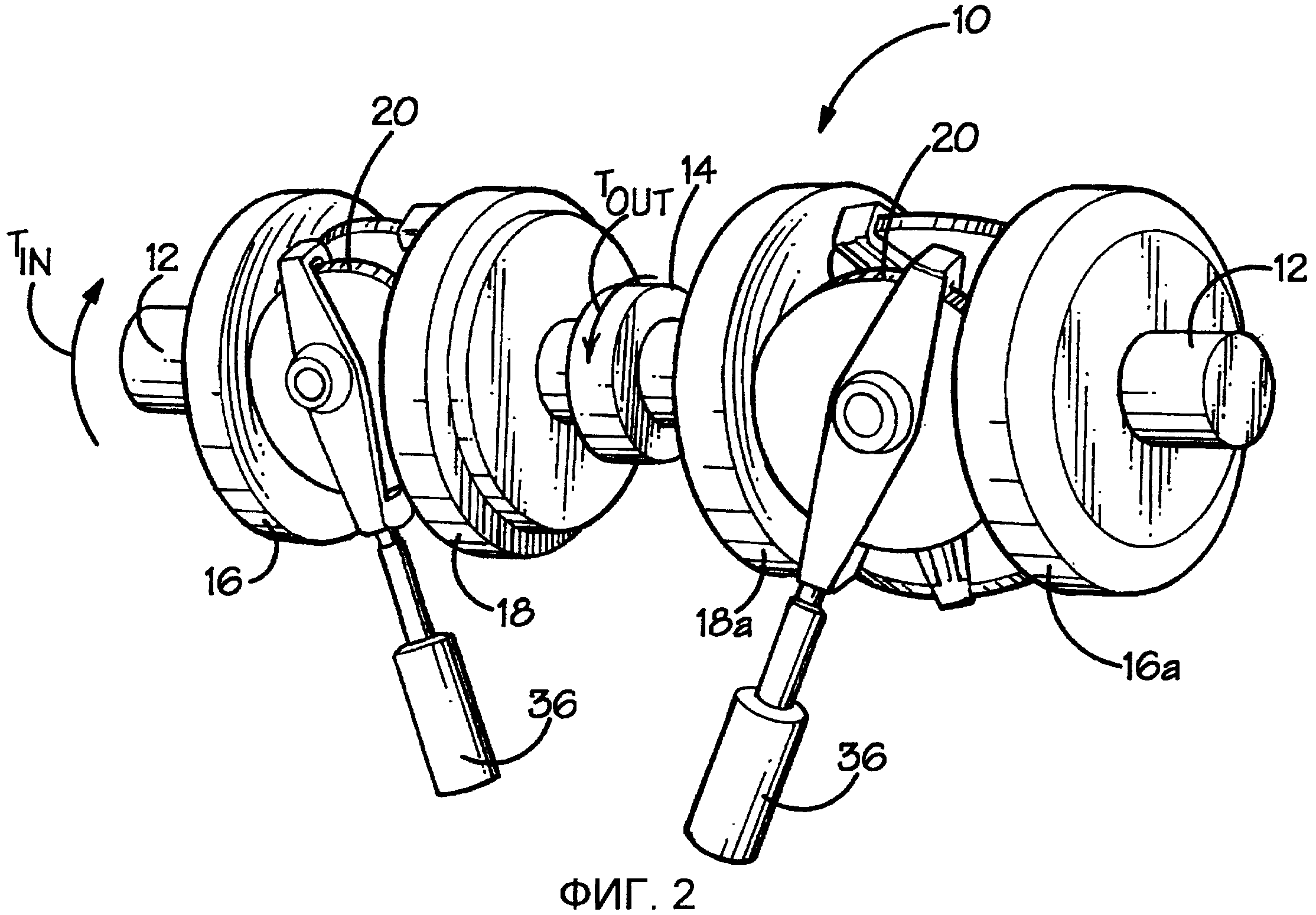
фиг.2 представляет собой вид в перспективе вариатора такого же типа;
фиг.3 представляет собой очень схематичное представление передачи, осуществляющей привод отбора мощности согласно настоящему изобретению;
фиг.4 представляет собой очень схематичное представление передачи для осуществления привода РТО, воплощающей настоящее изобретение;
фиг.5 представляет собой очень схематичное представление дополнительной передачи для осуществления привода РТО, воплощающей настоящее изобретение;
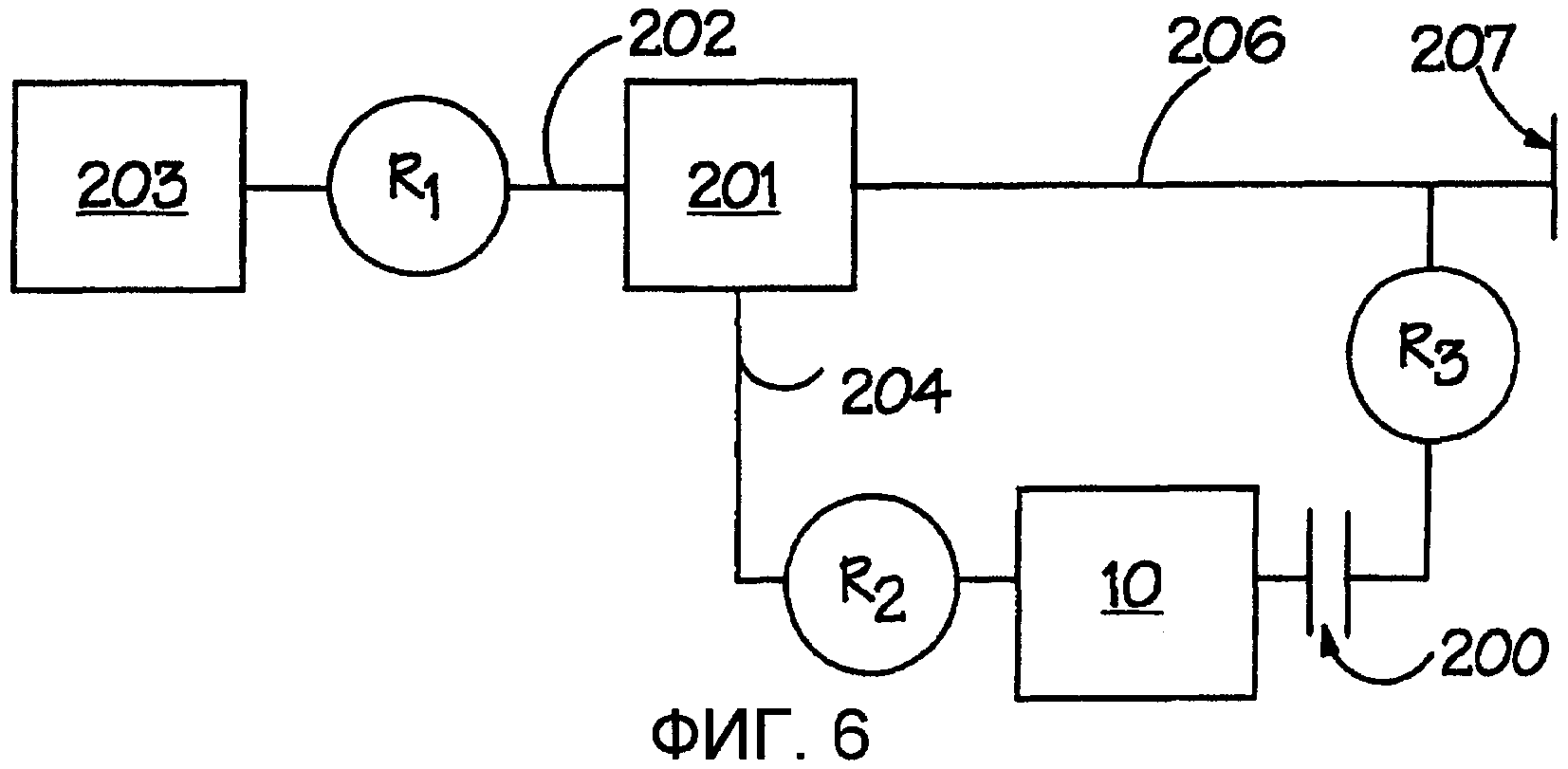
фиг.6 представляет собой очень схематичное представление еще одной дополнительной передачи для осуществления привода РТО, воплощающей настоящее изобретение.
В вариантах осуществления изобретения, которые должны быть описаны ниже, привод устройства отбора мощности осуществляется вращательным приводом (обычно это дизельный двигатель транспортного средства) через передачу и, более конкретно, устройство с бесступенчатым регулированием передаточного числа (вариатор), которое работает, регулируя скорее крутящий момент, чем передаточное число. Этот принцип известен из различных публикаций заявителя и других (включая ЕР04723989, опубликованный под № 1606135), однако кажется парадоксальным читателям, знакомым с более обычными передачами, и будет объяснен далее со ссылками на приведенную в качестве примера тороидальную передачу с силовыми роликами. Следует отметить, однако, что могут быть изготовлены другие виды передач, действующие на принципе регулирования крутящего момента, например такие, какие можно видеть в опубликованной Европейской патентной заявке 0736153 (Torotrak (Development) Ltd.).
Вариатор 10, показанный на фиг.1 и 2, не является сам по себе новым. Чертежи в высшей степени упрощены и предназначены для того, чтобы просто показать принципы его работы. Больше подробностей о конструкции можно найти в предыдущих публикациях заявителя, включающих в себя, например, Европейские патентные заявки №№ 0894210 и 1071891 (Torotrak (Development) Ltd.). На фиг. 1 показан входной вал 12 вариатора и выходной вал 14 вариатора, между которыми осуществляется передача приводного усилия с помощью устройства, содержащего ведущий диск 16, ведомый диск 18 и комплект роликов 20, только один из которых показан на фиг.1. Ведущий и ведомый диски установлены с возможностью вращения вокруг общей оси (оси 21 вариатора) и имеют обращенные друг к другу поверхности 22, 24, имеющие такую форму, что вместе они образуют, по существу, тороидальную полость 26, вмещающую ролики 20. Ролики 20 катятся по профилированным поверхностям обоих дисков и служат для передачи приводного усилия от одного диска к другому. Между роликами и дисками сохраняется пленка стадии для уменьшения до минимума износа на поверхности раздела и приводное усилие передается за счет сдвига в этой пленке. Диски смещаются друг к другу, обычно с помощью гидравлического исполнительного механизма, не показанного здесь, для создания давления на поверхности раздела, необходимого для осуществления этой передачи приводного усилия.
Каждый ролик 20 установлен так, что обеспечивается для него три степени свободы: (1) он способен вращаться вокруг собственной оси под воздействием дисков; (2) он способен перемещаться назад и вперед по окружности 27 вокруг оси 21 вариатора; и (3) он способен «прецессировать», т.е. вращаться вокруг оси прецессии 28, не являющейся параллельной ни относительно оси ролика, ни относительно оси вариатора, изменяя таким образом наклон ролика. Этого достигают в показанном на иллюстрации вариаторе путем ведения ролика в держателе 30, соединенном посредством поршневого штока 32 с поршнем 34. Поршень 34 заключен в цилиндре 36, образуя гидравлический исполнительный механизм, предназначенный для приложения к ролику контролируемого следующего усилия с составляющей вдоль его кругового направления перемещения 27.
Следует отметить, что ось прецессии 28 не является перпендикулярной оси 21 вариатора, но наклонена относительно перпендикуляра под продольным углом СА оси поворота. Кроме того, ролик подвержен управляющему воздействию со стороны дисков, по которым он катится, стремящемуся гарантировать, что движение ролика и прилегающего диска является параллельным на их поверхности раздела. Это равнозначно тому, чтобы сказать, что управляющее воздействие стремится поддерживать пересечение оси ролика с осью 21 вариатора. В результате существует взаимозависимость между положением ролика на окружности и его наклоном. При перемещении ролика назад и вперед он также прецессирует, т.е. изменяет свой наклон.
Ролики имеют тенденцию к согласованному движению, и наклон ролика соответствует передаточному числу вариатора. При изменении наклона роликов радиус пути, который они проходят по одному диску, уменьшается, в то время как радиус пути, пройденного по другому диску, увеличивается, изменяя таким образом относительные скорости двух дисков, т.е. изменяя передаточное число.
Рассмотрим теперь крутящие моменты, действующие относительно оси 21 вариатора. Двигатель осуществляет привод ведущего диска 16, прикладывая к нему входной крутящий момент Tin. Ролик приводится во вращение ведущим диском 16 и, в свою очередь, осуществляет привод ведомого диска 18, прилагая к нему выходной крутящий момент Tout. Сам ролик подвергается воздействию реактивного крутящего момента, направляющего его по круговой дорожке и определяемого суммой входного и выходного крутящих моментов (которые действуют в противоположных направлениях). Реактивный крутящий момент зависит также от имеющего место в настоящий момент наклона ролика. Для сохранения положения ролика необходимо противодействовать этому реактивному крутящему моменту, и в показанном на иллюстрации варианте осуществления противодействующий крутящий момент развивается гидравлическим исполнительным механизмом 8, 34, 36.
Следует отметить, что хотя выше рассматривается один ролик, те же доводы применимы совместно ко всему комплекту роликов. Диски стремятся вести их по кругу вокруг оси вариатора. Этому противодействует эффективный крутящий момент, приложенный к роликам соответствующими исполнительными механизмами. Если пренебречь любым крутящим моментом, который принимает участие в разгоне роликовых узлов, реактивный крутящий момент Tin+Tout должен быть равен эффективному крутящему моменту, приложенному исполнительными механизмами. Регулирование эффективного крутящего момента (или равнозначно можно говорить о круговом усилии, приложенном каждым исполнительным механизмом) обеспечивает регулирование реактивного крутящего момента. В показанном примере с использованием гидравлических исполнительных механизмов давление рабочей жидкости совместно прикладывается к противоположным сторонам каждого исполнительного механизма, а разница между двумя значениями давления рабочей жидкости определяет реактивный крутящий момент вариатора.
В то время как на фиг.1 показана только пара дисков, образующих одну тороидальную полость, на практике вариаторы обычно имеют две пары дисков, образующих две полости, каждая из которых содержит соответствующий комплект роликов. На фиг.2 показано такое устройство, в котором большинство компонентов являются прямыми копиями варианта, показанного на фиг.1, и обозначены такими же ссылочными позициями, хотя дополнительные ведущий и ведомый диски обозначаются соответственно как 16а и 18а. Следует отметить, что выходной вал 14 расположен между двумя ведомыми дисками 18, 18а. Приводное усилие от этого вала может быть отобрано, как хорошо известно, через цепь на промежуточный вал или через определенное соосное устройство.
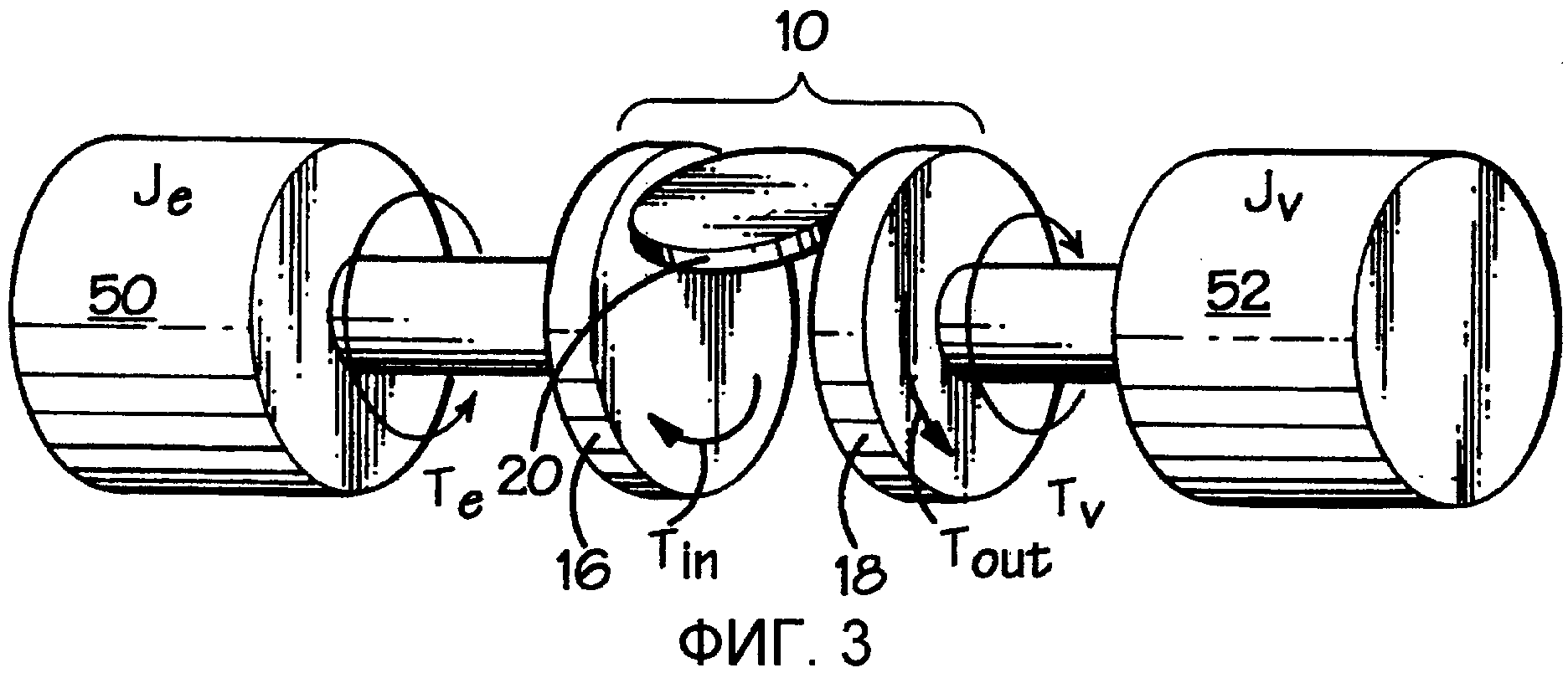
Обычно предполагается, что передача будет настроена на получение определенного передаточного числа и соответственно будет самонастраиваться в режиме работы, который может быть обозначен как «контроль передаточного числа». Дело обстоит не так в случае использования в передаче описанного выше вариатора с регулированием крутящего момента. Вместо этого вариатор регулирует крутящий момент (в частности, реактивный крутящий момент) и автоматически самонастраивается для компенсации последующих изменений передаточного числа. На фиг.3 сделана попытка проиллюстрировать принцип, на котором он основан. И в этом случае вариатор 10 показан очень схематично, когда показаны только ведущий и ведомый диски 16 и 18 и единственный ролик 20. Вход вариатора соединяется посредством зубчатой передачи с двигателем, а на чертеже зубчатая передача и двигатель показаны просто в виде блока 50, обладающего моментом инерции Je (который создается двигателем, зубчатой передачей и деталями самого вариатора), и прилагает к вариатору ведущий крутящий момент двигателя Те. Выход вариатора соединяется посредством зубчатой передачи с валом устройства отбора мощности и, таким образом, с определенным внешним рабочим средством. Блок 52 представляет и результирующий момент инерции Jv, относящийся к выходу вариатора (связанный с инерцией зубчатой передачи, деталей вариатора и движущихся деталей рабочим средством), и тормозной момент Tv, приложенный к выходу вариатора благодаря работе, выполняемой рабочим средством, а также потерям из-за трения. Напомним, что реактивный крутящий момент Tin+Tout регулируется вариатором. Отношение Tin/Tout определяется действующим передаточным числом вариатора. Поэтому значения Tin и Tout (если пренебречь недостатками вариатора) определяются реактивным крутящим моментом вариатора и действующим передаточным числом вариатора. На выходе вариатора получаем эффективный крутящий момент Tin-Tout, позволяющий разгонять инерцию на выходе Jv. Если этот эффективный крутящий момент не равен нулю, частота вращения на выходе изменится. Вариатор автоматически компенсирует это изменение посредством изменения своего передаточного числа (благодаря перемещению и прецессированию роликов), и изменение частоты вращения на выходе и передаточного числа вариатора продолжается вплоть до достижения равновесия, при котором Tout равно Tin. В принципе то же самое относится, с соответствующими изменениями, к входной стороне вариатора: любой дисбаланс между крутящим моментом двигателя Те и крутящим моментом Tin, созданным вариатором на его входе, должен привести к изменению частоты вращения на входе вариатора, направленному на восстановление равновесия. Однако привод РТО часто осуществляется дизельным двигателем с регулированием скорости, который автоматически регулирует свой крутящий момент на выходе для поддержания выбранного числа оборотов двигателя, так что на практике двигатель сам может регулировать свой крутящий момент Те для достижения по существу постоянной частоты вращения на входе вариатора.
Вариатор регулирует крутящие моменты на своем входе и выходе и сам автоматически настраивается на передаточное число, получаемое за счет воздействия этих крутящих моментов на инерцию на входе и выходе, вместо того чтобы регулировать свое передаточное число (как в большинстве других CVT), и создает крутящие моменты на входе и выходе, необходимые для достижения этого передаточного числа.
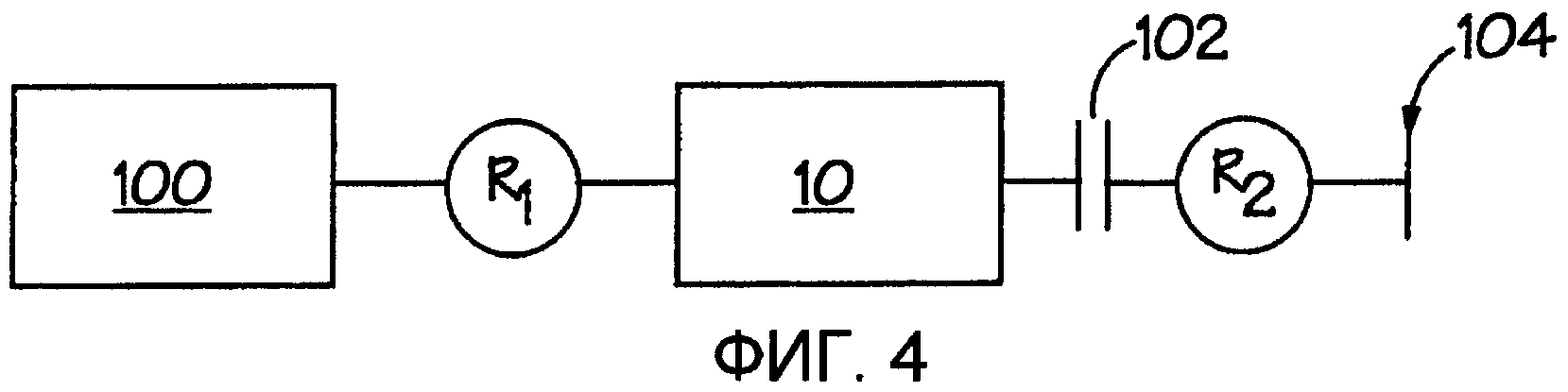
Как было отмечено выше, для подключения вариатора между двигателем и валом отбора мощности предусмотрена зубчатая передача. На фиг.4 представлено очень простое устройство, на котором привод вариатора 10 осуществляется через ступенчатую зубчатую передачу R1 от двигателя 100 и соединяется посредством муфты сцепления 102 и зубчатой передачи R2 с устройством отбора мощности 104. Муфта сцепления 102 используется для отсоединения в случае необходимости двигателя от РТО 104 и для осуществления запуска.
Более сложное решение представлено на фиг.5, в котором используется планетарный зубчатый механизм, обозначенный здесь как «шунт» 150. Она является общим типом устройств, известных в связи с передачами, предназначенными для осуществления привода колес транспортного средства. Основной принцип устройства планетарной зубчатой передачи очень хорошо известен и не будет описан здесь подробно. Она содержит три входных вала, соединенных соответственно с (1) солнечным зубчатым колесом, (2) кольцевым зубчатым колесом, и (3) водилом, на котором установлены планетарные зубчатые колеса, находящиеся в зацеплении с солнечным зубчатым колесом и кольцевым зубчатым колесом. В показанном устройстве один из валов шунта 152 соединен посредством зубчатой передачи R1 с двигателем 153. Другой вал шунта 154 соединен с двигателем через вариатор 10 и зубчатые передачи R2, R3. Третий вал шунта 156 соединен посредством конечной зубчатой передачи R4 с РТО 158. Устройство такого типа иногда описывают как устройство с рециркуляцией мощности, поскольку мощность циркулирует по замкнутому контуру, образуемому шунтом и вариатором. Оно обладает важным преимуществом, поскольку предоставляет средство для бесконечного снижения скорости или «нейтрального зубчатого зацепления». При определенном передаточном числе вариатора входы 152, 154 в шунт уравновешивают друг-друга, так что выход 156 является неподвижным несмотря на том, что физически он соединен с движущимся двигателем. Благодаря этому средству нейтрального зубчатого зацепления устройству не требуется муфта сцепления для отсоединения РТО от двигателя.
Конечно, для пользователя является привычной возможность отсоединения такой муфты для того, чтобы добиться «нейтрального» положения, при котором РТО вращается свободно. Однако такого же состояния можно легко достичь в показанном устройстве за счет использования вариатора с регулируемым крутящим моментом, путем настройки вариатора на получение нулевого реактивного крутящего момента. В этом случае, если пренебречь потерями на трение, крутящие моменты на входе и выходе вариатора равны соответственно нулю. Выход находится в состоянии свободного вращения, в то время как передаточное число вариатора меняется так, как это требуется для компенсации последующих изменений в частоте вращения РТО. Так, например, если устройство оказывается в этом квазинейтральном состоянии, в то время как РТО соединяется с движущейся нагрузкой, такой как пресс-подборщик, приводное усилие не подается больше на нагрузку, которая, естественно, останавливается, в то время как передаточное число вариатора автоматически переходит на нейтральное зубчатое зацепление, позволяя двигателю продолжать работать. В описанном выше вариаторе с гидравлическим управлением квазинейтральное состояние достигается путем выравнивания давления с двух сторон поршня 34.
Альтернативное устройство, проиллюстрированное на фиг.6, не образует нейтрального зубчатого зацепления и поэтому нуждается в муфте сцепления 200. Его преимущество заключается в том, что оно позволяет уменьшить долю мощности, пропускаемую через вариатор. Поступающие на РТО крутящий момент и мощность могут быть большими. Желательно пропустить как можно большую мощность через зубчатую передачу и как можно меньшую через сам вариатор, причем и то, и другое способствует повышению кпд и позволяет уменьшить вес и объем вариатора. В этом устройстве шунт 201 имеет первый вал 202, соединенный посредством зубчатой передачи R1 с двигателем; второй вал 204, соединенный посредством зубчатой передачи R2 со стороной входа вариатора 10; и третий вал 206, соединенный с РТО 207 зубчатой передачей R3. Третий вал 206 дополнительно может быть соединен со стороной выхода вариатора путем зацепления муфты сцепления 200. Когда муфта 200 расщепляется, вариатор и второй вал 204 переходят на свободный ход. В результате шунт как целое также может перейти на свободный ход. Никакой мощности привода с его первого вала 202 на третий вал 206 не передается, и устройство таким образом становится нейтральным. При зацеплении муфты сцепления вариатор определяет общее передаточное число и определенная мощность обязательно должна рециркулировать через вариатор, но при должном выборе передаточных чисел можно гарантировать, что на ее долю придется лишь небольшая часть всей передаваемой мощности.
Управление устройством РТО вероятно может быть обеспечено с помощью исключительно механического или гидравлического устройства, но предпочтительный способ управления предполагает использование микропроцессора, принимающего входные сигналы, указывающие мгновенные значения частоты вращения на входе и выходе и других рабочих переменных, и выдающего команды на гидравлические клапаны, управляющие вариатором и, там где нужно, связанную с ним муфту сцепления. Клапаны управления вариатором регулируют давление, приложенное с двух сторон поршней 34 вариатора, и определяют таким образом реактивный крутящий момент вариатора.
Средства управления, находящиеся в распоряжении пользователя, являются простыми. Типичный вариант осуществления предполагает использование управления «включено-выключено» для переключения между нейтральным и рабочим положением, а вариатор (и, в случае наличия, муфта сцепления) соответственно управляется микропроцессором. Чаще всего требуется, чтобы сельскохозяйственные РТО работали с постоянной частотой вращения, такой как 1000 об/мин. Пользователь может получить возможность выбора частоты оборотов из определенного диапазона или из набора отдельных альтернативных значений. И, наконец, возможно обеспечение средства управления, позволяющего пользователю регулировать уровень крутящего момента на выходе при запуске - в сущности для управления быстротой запуска.
Как было отмечено выше, применяемый для привода РТО двигатель во многих случаях будет двигателем с регулируемой скоростью, т.е. он будет способен сохранять заданное число оборотов. Кроме того, во многих случаях на выходе РТО будет требоваться постоянная частота вращения. При обычной передаче требуемая частота вращения на выходе получается в зависимости от выбора частоты вращения на входе и передаточного числа. Следует отметить, однако, что описанный здесь вариатор с регулированием крутящего момента не обеспечивает возможности непосредственного регулирования передаточного числа. Поэтому для того, чтобы поддерживать требуемую частоту вращения на выходе, требуется средство управления, позволяющее регулировать реактивный крутящий момент вариатора в соответствии с необходимостью поддержания частоты вращения РТО на выходе. Это может быть, например, достигнуто с помощью центробежного регулятора, но и в этом случае предпочтительным решением является выполнение этой задачи микропроцессором. Самым простым решением является регулирование реактивного крутящего момента на основании обратной связи с частотой вращения на выходе, с использованием, например, пропорционально-интегрально-дифференцированного (PID) контроллера. Обычной альтернативой регулированию постоянной частоты вращения РТО является связь частоты вращения РТО со скоростью транспортного средства относительно земли. Этого можно достичь, посылая информацию о скорости относительно земли на контроллер, или путем привода РТО и колес транспортного средства от одной и той же передачи.
Использование вариатора с регулируемым крутящим моментом позволяет придерживаться удобной методики при запуске РТО. Простая методика управления устройством типа, показанного на фиг.5, заключается в простом переключении при запуске с нулевого реактивного крутящего момента на определенное фиксированное значение реактивного крутящего момента, установленное с использованием клапанов управления вариатором. Следует отметить, что это не равнозначно внезапному зацеплению муфты в обычном устройстве РТО, где существует опасность остановки двигателя из-за несоответствия скоростей двигателя и РТО. Повышение реактивного крутящего момента создает крутящий момент на выходе РТО и ведет к приложению соответствующего крутящего момента к двигателю, но не требует какого-либо резкого изменения передаточного числа. Вместо этого нагрузка РТО способна разгоняться из положения покоя с интенсивностью, определяемой ее инерцией, в то время как двигатель продолжает работать с заданным числом оборотов, а вариатор автоматически компенсирует последующее постепенное изменение передаточного числа. Кроме того, устройство, показанное на фиг.5, автоматически обеспечивает «мягкий старт», при котором нагрузка, приложенная к двигателю, возрастает постепенно. Для того чтобы понять, почему это происходит, напомним, что нейтральное зубчатое зацепление имеет результатом бесконечное уменьшение скорости при передаче от двигателя на РТО. При нейтральном зубчатом зацеплении (пренебрегая эффектом трения) нагрузка, приложенная к двигателю, является нулевой вне зависимости от крутящего момента, созданного на выходе РТО. При возрастании частоты вращения на выходе вариатор поддерживает постоянное значение реактивного крутящего момента, но отношение крутящего момента нагрузки двигателя к крутящему моменту на выходе РТО постепенно растет. Более сложная методика запуска, предусматривающая контроль за разгоном нагрузки, может быть легко реализована с использованием микропроцессора. В случае, когда РТО содержит муфту сцепления, возможно применение отдельной гидравлической системы для регулирования давления, приложенного к муфте, и значений давления управления вариатором. С другой стороны, и к вариатору, и к муфте может быть приложено одинаковое гидравлическое давление, которое постепенно повышается при запуске для того, чтобы получить мягкий старт.
Проблемы остановки двигателя при обычной работе, в отличие от запуска, также легко решаются с помощью настоящего изобретения. Нагрузки на приводимые в действие с помощью РТО рабочие средства могут варьироваться в широких пределах, например, из-за сцепления свойств материала, подвергаемого обработке. Например, встречающийся силосоуборочным комбайном участок с особенно влажной или густой травой может (при обычном устройстве РТО с использованием постоянного передаточного числа) вызвать перегрузку двигателя, который, обладая недостаточной мощностью для поддержания своего количества оборотов, глохнет. Посмотрим, что происходит в такой ситуации с устройством РТО с регулируемым крутящим моментом. Нагрузка на РТО возрастает. Если реактивный крутящий момент вариатора не регулируется, это ведет к тому, что нагрузка на РТО превышает доступный для осуществления привода крутящий момент. Поэтому РТО замедляется, а вариатор автоматически компенсирует последующее изменение передаточного числа, поддерживая заданный реактивный крутящий момент. Количество оборотов двигателя может сохраняться. Уменьшение передаточного числа ведет к увеличению крутящего момента на выходе РТО, так что в определенный момент может быть достигнуто равновесие, при котором двигатель способен осуществлять привод РТО с постоянным, хотя и уменьшенным, количеством оборотов. Ситуация несколько усложняется за счет применения контроллера, который стремится сохранять постоянство на выходе РТО, но в этом контексте происходит прямое применение методики, которая просто ограничивает реактивный крутящий момент на основании максимальной нагрузки, которая может быть приложена к двигателю, позволяя вариатору при необходимости работать так, как описано.
Выше упоминались проблемы, связанные с РТО, используемыми для привода колес прицепов или шарнирно-сочлененных транспортных средств в случае несовпадения частоты вращения колес. Эти проблемы легко решаются с помощью РТО типа, описанного здесь, поскольку отсутствует необходимость задавать частоту вращения РТО и, следовательно, колес, привод которых осуществляется им. Вместо этого установка реактивного крутящего момента определяет (при данном передаточном числе) крутящий момент, приложенный к колесам. Их частота вращения может свободно изменяться так, как необходимо для согласования с общей скоростью транспортного средства, когда последующие изменения передаточного числа автоматически компенсируются вариатором. Возможно применение усложненной методики, которая предусматривает регулирование крутящего момента колес в соответствии с рельефом, требованиями привода и т.д.
Что касается кпд двигателя, то возможно внесение улучшений по сравнению с обычными устройствами привода РТО путем координированного управления двигателем и передачей, осуществляющей привод РТО. Таким образом, например, можно уменьшить количество оборотов двигателя в случае, когда необходимость в мощности мала, с вариатором, настроенным на поддержание частоты вращения на выходе, что позволяет снизить расход топлива.
Реферат
Изобретение относится к устройствам отбора мощности для транспортных средств. Устройство привода для отбора мощности (РТО) транспортного средства содержит вал РТО, предназначенный для соединения с приспособлением с механическим приводом. Входной вал выполнен с возможностью соединения с вращательным приводом, таким как двигатель. Бесступенчато-регулируемая передача (10) присоединена между входным валом и валом для передачи приводного усилия между ними при бесступенчато-регулируемом передаточном числе. Бесступенчато-регулируемая передача сконструирована и выполнена с возможностью регулирования крутящего момента и автоматического компенсирования изменения частоты вращения на валу РТО посредством изменения его передаточного числа. Достигается повышение надежности устройства. 2 н. и 15 з.п. ф-лы, 6 ил.
Комментарии