Устройство управления для автоматической трансмиссии - RU2643901C2
Код документа: RU2643901C2
Чертежи
Описание
Область техники
[0001] Настоящее изобретение относится к устройству управления для автоматической трансмиссии, в которую вводятся движущие силы из источников приведения в движение, включающих в себя двигатель и электромотор.
Уровень техники
[0002] Традиционно известно устройство, в котором автоматическая трансмиссия содержится в цепи привода, и в котором момент времени, в который нагрузка электромотора-генератора, который выполняет управление числом оборотов при предварительно определенном целевом числе оборотов, увеличивается на предварительно определенную величину, определяется как момент времени, в который муфта, зацепляемая в диапазоне движения, начала зацепление (см. патентный документ 1).
[0003] В традиционном устройстве, во время переключения режима из HEV-режима, в котором движущие силы двигателя и электромотора-генератора вводятся на входной вал автоматической трансмиссии, в EV-режим, в котором только движущая сила электромотора-генератора вводится в автоматическую трансмиссию, выполняются процесс остановки двигателя и процесс разделения между двигателем и электромотором-генератором (CL1-расцепление).
[0004] Тем не менее, во время переключения из HEV-режима в EV-режим, при котором выполняются эти процессы, нагрузка электромотора-генератора во время управления числом оборотов, при котором число оборотов входного вала автоматической трансмиссии предоставляет целевое число оборотов, варьируется независимо от состояния зацепления муфты, зацепляемой в диапазоне движения. Следовательно, когда вышеописанное переключение режима возникает до определения начала зацепления муфты, варьирование нагрузки электромотора-генератора, который возникает вследствие переключения режима, ошибочно определяется в качестве начала зацепления муфты. Это представляет собой задачу настоящего изобретения.
Предварительно опубликованные документы
Патентные документы
[0005] Патентный документ 1. Публикация заявки на патент (Япония) (Tokkai) 2009-190584.
Раскрытие изобретения
[0006] Цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления для автоматической трансмиссии, которое не допускает ошибочного определения варьирования нагрузки электромотора, которое возникает вследствие переключения из HEV-режима в EV-режим, как начала зацепления фрикционного элемента зацепления.
[0007] Устройство управления для автоматической трансмиссии согласно настоящему изобретению представляет собой устройство управления для автоматической трансмиссии, в которую вводятся движущие силы из источников приведения в движение, включающих в себя двигатель и электромотор. Устройство управления для автоматической трансмиссии включает в себя: фрикционный элемент зацепления, зацепляемый в диапазоне движения; средство определения начала зацепления; и средство запрещения определения.
Средство определения начала зацепления определяет то, что фрикционный элемент зацепления начал зацепление в случае, если нагрузка электромотора увеличивается на предварительно определенную величину во время управления числом оборотов, при котором число оборотов входного вала автоматической трансмиссии управляется до предварительно определенного целевого числа оборотов, и когда выбирается диапазон движения, и зацепляется фрикционный элемент зацепления в состоянии расцепления.
Средство запрещения определения запрещает определение средством определения начала зацепления до определения того, что фрикционный элемент зацепления начал зацепление, и в случае если возникает переключение из HEV-режима, в котором движущие силы двигателя и электромотора вводятся на входной вал, в EV-режим, в котором только движущая сила электромотора вводится на входной вал.
[0008] Таким образом, до определения того, что фрикционный элемент зацепления начал зацепление, и в случае если возникает переключение режима из HEV-режима в EV-режим, средство запрещения определения запрещает определение средством определения начала зацепления.
Другими словами, средство определения начала зацепления определяет то, что фрикционный элемент зацепления начал зацепление во время управления числом оборотов входного вала автоматической трансмиссии, и в случае если нагрузка электромотора увеличивается на предварительно определенную величину, когда фрикционный элемент зацепления в состоянии расцепления зацепляется, при выбранном диапазоне движения.
Тем не менее, в случае если переключение возникает из HEV-режима в EV-режим, процесс остановки двигателя и процесс разделения между двигателем и электромотором выполняются таким образом, что нагрузка электромотора варьируется.
Таким образом, в случае когда выбирается диапазон движения, и зацепляется фрикционный элемент зацепления, вмешивается переключение из HEV-режима в EV-режим. В этом случае, варьирование нагрузки электромотора, сформированное вследствие процесса остановки двигателя и т.д., ошибочно определяется в качестве варьирования нагрузки вследствие начала зацепления фрикционного элемента зацепления. Следовательно, когда возникает переключение из HEV-режима в EV-режим, определение начала зацепления фрикционного элемента зацепления вследствие варьирования нагрузки электромотора не выполняется.
Следовательно, может не допускаться ошибочное определение варьирования нагрузки электромотора, которое возникает вследствие переключения из HEV-режима в EV-режим, как начала зацепления фрикционного элемента зацепления.
Краткое описание чертежей
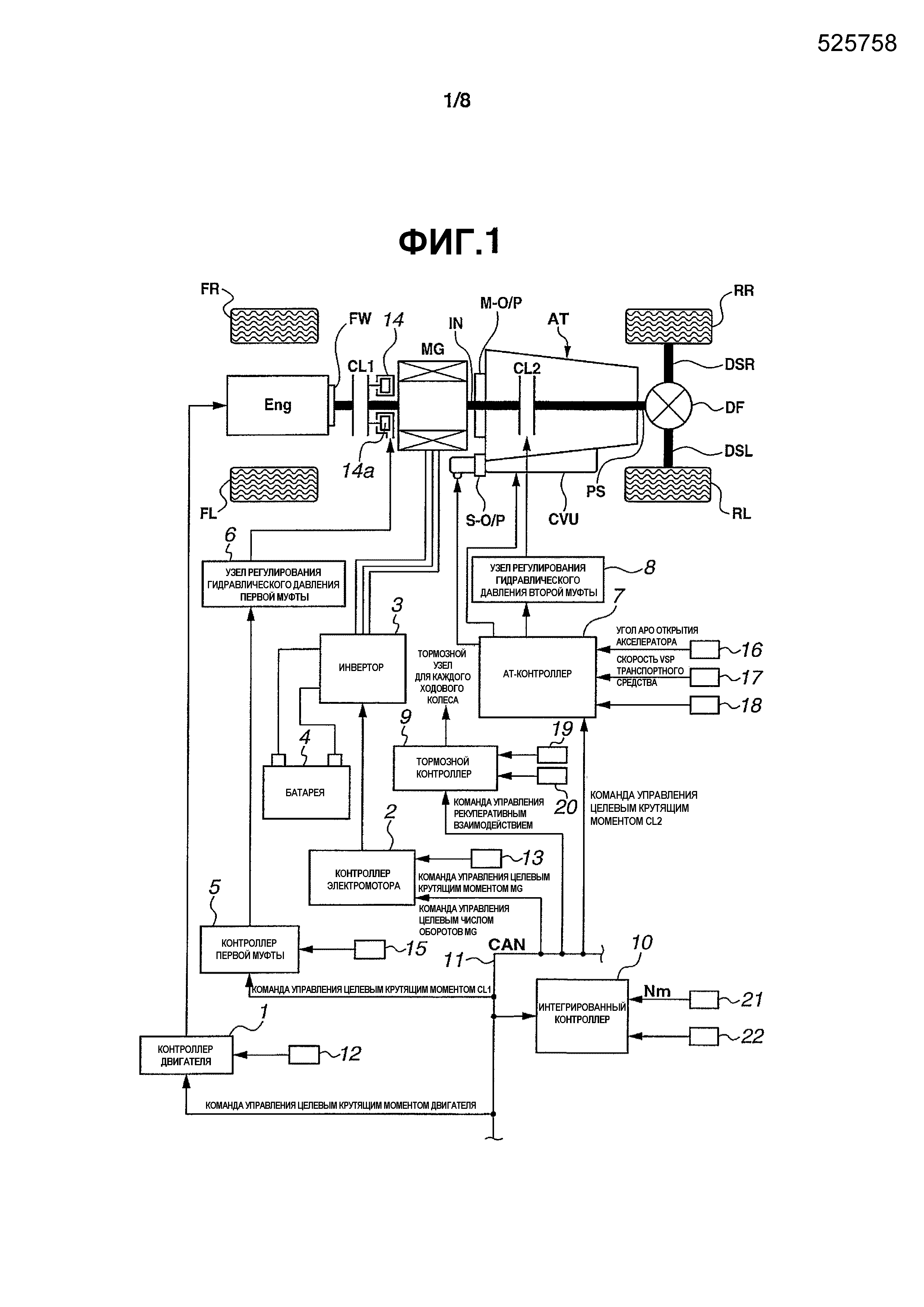
[0009] Фиг. 1 является видом общей конфигурации системы, представляющим гибридное транспортное средство FR-типа (пример транспортного средства) в системе с приводом на задние колеса, к которому применяется устройство управления для автоматической трансмиссии в первом предпочтительном варианте осуществления.
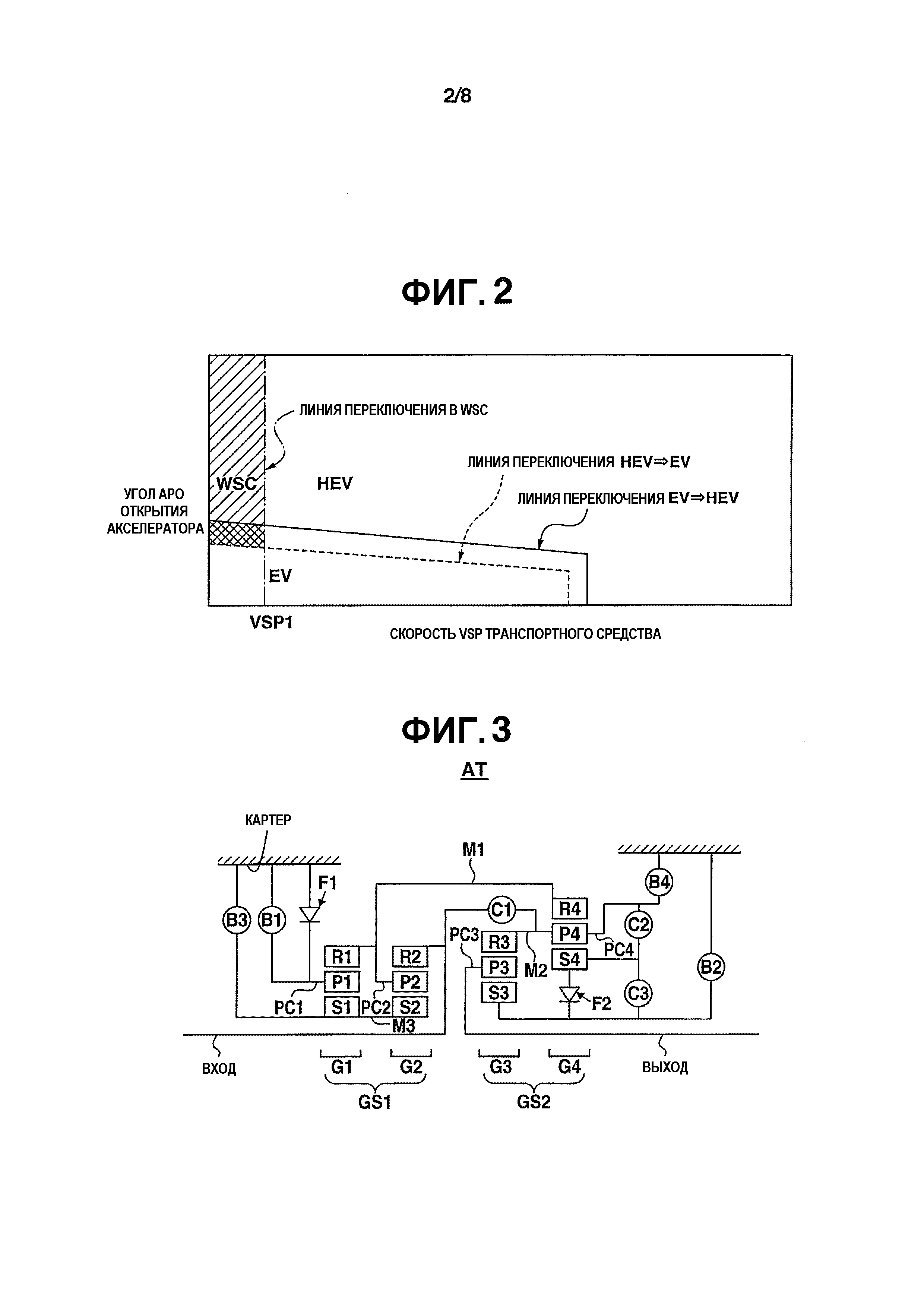
Фиг. 2 является представлением в форме карты, представляющим карту выбора EV-HEV, заданную в секции выбора режима интегрированного контроллера в первом предпочтительном варианте осуществления.
Фиг. 3 является схематичным видом, представляющим один пример автоматической трансмиссии, в которой содержится фрикционный элемент зацепления, который представляет собой объект управления с распознаванием хода в устройстве управления для автоматической трансмиссии в первом предпочтительном варианте осуществления.
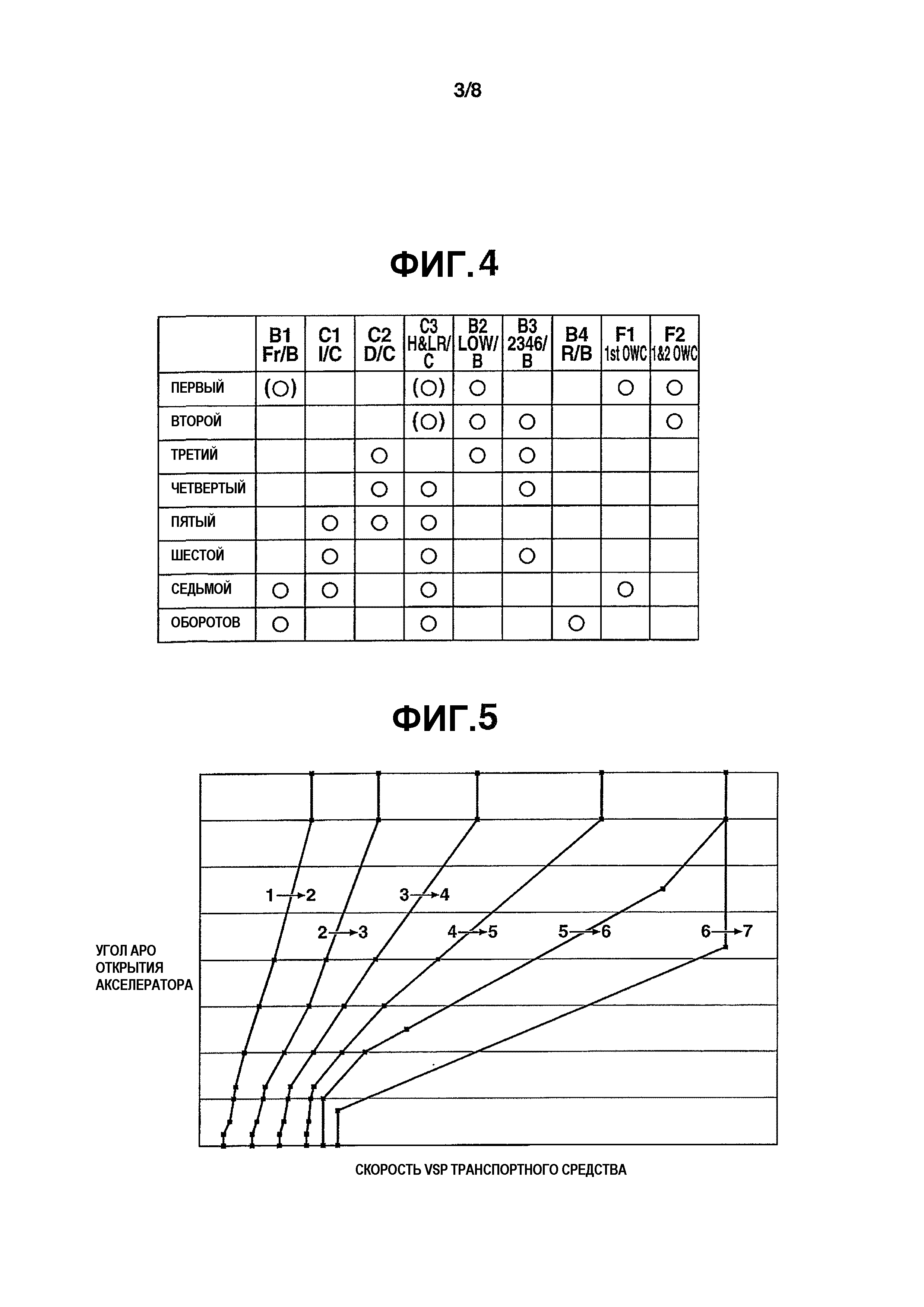
Фиг. 4 является таблицей операций зацепления, представляющей состояние зацепления каждого фрикционного элемента зацепления для каждой из ступеней переключения передач в автоматической трансмиссии в первом варианте осуществления.
Фиг. 5 является представлением в форме карты, представляющим один пример карты переключения передач автоматической трансмиссии, заданной в AT-контроллере в первом предпочтительном варианте осуществления.
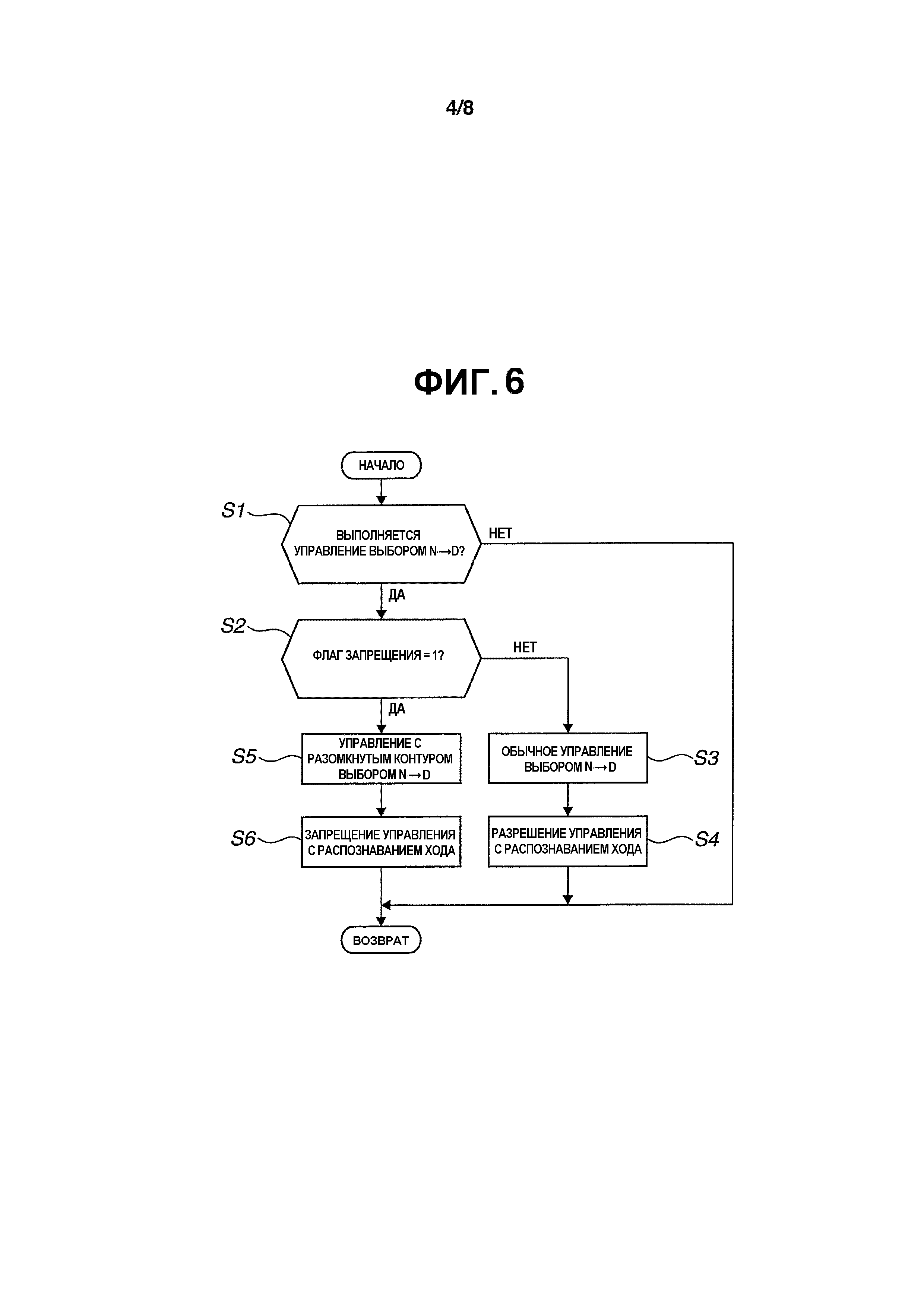
Фиг.6 является блок-схемой последовательности операций способа, представляющей последовательность операций процесса управления выбором N→D, выполняемого в AT-контроллере в первом предпочтительном варианте осуществления.
Фиг. 7 является блок-схемой последовательности операций способа, представляющей последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере в первом предпочтительном варианте осуществления.
Фиг. 8 является временной диаграммой, представляющей каждую характеристику из фазы, числа оборотов, крутящего момента входного вала, управляющего крутящего момента CL1, фактического крутящего момента CL1, регулируемого гидравлического давления CL1, таймера, флага запрещения и фрикционного элемента зацепления в случае, если переключение из HEV-режима в EV-режим вмешивается согласно управлению выбором N→D, когда остановлено гибридное транспортное средство, в котором монтируется устройство управления в первом варианте осуществления.
Фиг. 9 является блок-схемой последовательности операций способа, представляющей последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере во втором предпочтительном варианте осуществления.
Фиг. 10 является блок-схемой последовательности операций способа, представляющей последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере в третьем предпочтительном варианте осуществления.
Подробное описание вариантов осуществления изобретения
[0010] Оптимальные варианты осуществления для реализации устройства управления для автоматической трансмиссии согласно настоящему изобретению поясняются на основе первого, второго и третьего предпочтительных вариантов осуществления, показанных на чертежах.
Первый вариант осуществления
[0011] Во-первых, поясняется структура.
Устройство управления для автоматической трансмиссии в первом варианте осуществления поясняется с секционированием на разделы "Общая конфигурация системы", "Подробная конструкция автоматической трансмиссии", "Подробная структура процесса управления выбором N→D" и "Подробная структура процесса задания флагов запрещения".
[0012] Общая конфигурация системы
Фиг. 1 показывает гибридное транспортное средство FR-типа с приводом на задние ходовые колеса, к которому применяется устройство управления для автоматической трансмиссии в первом варианте осуществления. Фиг. 2 показывает пример карты выбора EV-HEV, заданной в секции выбора режима интегрированного контроллера 10. В дальнейшем в этом документе, поясняется общая конфигурация системы на основе фиг. 1 и 2.
[0013] Цепь привода гибридного транспортного средства FR-типа, как показано на фиг. 1, включает в себя: двигатель Eng; первую муфту CL1; электромотор/генератор MG (электромотор); вторую муфту CL2; автоматическую трансмиссию AT; входной трансмиссионный вал IN; карданный вал PS; дифференциал DF; левый ведущий вал DSL, правый ведущий вал DSR; левое заднее ходовое колесо RL (ведущее колесо); и правое заднее ходовое колесо RR (ведущее колесо). Следует отметить, что M-O/P обозначает механический масляный насос, S-O/P обозначает электрический масляный насос, FL обозначает переднее левое ходовое колесо, и FW обозначает маховик.
[0014] Первая муфта CL1 представляет собой элемент зацепления, размещенный между двигателем Eng и электромотором/генератором MG, и представляет собой так называемую нормально закрытую муфту типа, в котором состояние зацепления формируется посредством силы смещения диафрагменной пружины и т.п., когда гидравлическое давление CL1 не прикладывается, и состояние расцепления формируется посредством добавления гидравлического давления CL1 против этой силы смещения.
[0015] Автоматическая трансмиссия AT представляет собой многоступенчатую трансмиссию, в которой ступени переключения передач из 7 скоростей переднего хода/1 скорости заднего хода автоматически переключаются в соответствии со скоростью транспортного средства, углом открытия акселератора и т.д.
Вторая муфта CL2 располагается между электромотором/генератором MG и левым и правым задними ходовыми колесами RL, RR. В качестве второй муфты CL2 не используется добавление в качестве специальной муфты, независимой от автоматической трансмиссии, а используется один фрикционный элемент зацепления (муфта или тормоз), чтобы переключать передачи автоматической трансмиссию AT. Другими словами, из множества фрикционных элементов зацепления, зацепленных на соответствующих ступенях переключения передач автоматической трансмиссии AT, один из фрикционных элементов зацепления, который выбирается в качестве элемента, который соответствует условию зацепления и т.п., служит в качестве второй муфты CL2. Следует отметить, что узел 6 регулирования гидравлического давления первой муфты и узел 8 регулирования гидравлического давления второй муфты включены в клапанный узел CVU регулирования гидравлического давления AT, дополнительно установленный в автоматической трансмиссии AT.
[0016] Это гибридное транспортное средство FR-типа, в качестве режимов согласно различию в форме привода, включает в себя: режим электрического автомобильного транспортного средства (в дальнейшем в этом документе, называемый "EV-режимом"); режим гибридного транспортного средства (в дальнейшем в этом документе, называемый "HEV-режимом"); и режим управления крутящим моментом приведения в движение (в дальнейшем в этом документе, называемый "WSC-режимом").
[0017] Вышеописанный "EV-режим" представляет собой режим, в котором первая муфта CL1 расцепляется, и источник приведения в движение представляет собой только электромотор/генератор MG, и включает в себя режим приведения в движение за счет электромотора (движение за счет мощности электромотора) и режим выработки электрической мощности за счет генератора (регенерация за счет генератора). Этот EV-режим выбирается, например, когда запрошенная движущая сила является низкой, и обеспечивается SOC батареи.
[0018] Вышеописанный "HEV-режим" представляет собой режим, в котором первая муфта CL1 находится в состоянии зацепления, и источники приведения в движение представляют собой двигатель Eng и электромотор/генератор MG, и включает в себя: режим движения с использованием помощи электромотора (движение за счет мощности электромотора); режим выработки электрической мощности за счет двигателя (регенерация за счет генератора); и режим выработки рекуперативной мощности при замедлении (регенерация за счет генератора). Этот "HEV-режим" выбирается, например, когда запрошенная движущая сила является высокой или когда SOC батареи является недостаточным.
[0019] Вышеописанный "WSC-режим" представляет собой "HEV-режим" в форме привода. Тем не менее, WSC-режим представляет собой режим, в котором электромотор/генератор MG подвергается такому управлению по числу оборотов, при котором, в то время как вторая муфта CL2 поддерживается в состоянии зацепления в режиме скольжения, управляется перегрузочная способность по передаче крутящего момента второй муфты CL2. Перегрузочная способность по передаче крутящего момента второй муфты CL2 управляется таким образом, что движущая сила, передаваемая через вторую муфту CL2, становится запрошенной движущей силой, возникающей в регулирующей переменной нажатия педали акселератора водителем. Этот "WSC-режим" выбирается в области, в которой число оборотов двигателя ниже числа оборотов на холостом ходу в таком случае, в котором транспортное средство начинает движение в состоянии выбора "HEV-режима".
[0020] Система управления гибридным транспортным средством FR-типа, как показано на фиг. 1, включает в себя: контроллер 1 двигателя; контроллер 2 электромотора; инвертор 3; батарея 4; контроллер 5 первой муфты; узел 6 регулирования гидравлического давления первой муфты; AT-контроллер 7; узел 8 регулирования гидравлического давления второй муфты; тормозной контроллер 9; и интегрированный контроллер 10.
[0021] Каждый контроллер 1, 2, 5, 7, 9 и интегрированный контроллер 10 соединяются через линию 11 CAN-связи, через которую возможен взаимный обмен информацией. Следует отметить, что ссылка с номером 12 обозначает датчик числа оборотов двигателя, ссылка с номером 13 обозначает круговой датчик позиции, ссылка с номером 15 обозначает датчик хода первой муфты, который определяет позицию хода поршня 14a актуатора 14 на основе гидравлического давления, ссылка с номером 19 обозначает датчик скорости ходовых колес, и ссылка с номером 20 обозначает датчик хода тормоза.
[0022] AT-контроллер 7 вводит информацию из датчика 16 угла открытия акселератора, датчика 17 скорости транспортного средства, переключателя 18 режима движения, определяющего позицию выбранного диапазона (N-диапазон, D-диапазон, R-диапазон, P-диапазон и т.д.). Затем в ходе движения с выбранным D-диапазоном, оптимальная ступень переключения передач обнаруживается из позиции точки приведения в движение, определенной согласно углу APO открытия акселератора и скорости VSP транспортного средства, присутствующей на карте переключения передач (см. фиг. 5), и команда управления для того, чтобы достигать искомой ступени переключения передач, выводится в клапанный узел CVU регулирования гидравлического давления AT. В дополнение к этому управлению переключением передач, AT-контроллер 7 выполняет управление зацеплением/скольжением/расцеплением для первой муфты CL1 и второй муфты CL2 на основе команд из интегрированного контроллера 10.
[0023] Интегрированный контроллер 10 управляет потребляемой энергией всего транспортного средства и служит для обеспечения максимально эффективной работы транспортного средства. Интегрированный контроллер 10 вводит требуемую информацию из датчика 21 числа оборотов электромотора, определяющего число Nm оборотов электромотора, и других датчиков и переключателей 22 и информацию через линию 11 CAN-связи. Этот интегрированный контроллер 10 включает в себя секцию выбора режима, которая выбирает искомый режим из позиции, в которой точка приведения в движение, определенная согласно углу APO открытия акселератора и скорости VSP транспортного средства, присутствует на карте выбора EV-HEV, показанной на фиг. 2 в качестве целевого режима. Далее, когда выполняется переключение режима из "EV-режима" в "HEV-режим", выполняется управление запуском двигателя. Помимо этого, когда выполняется переключение режима из "HEV-режима" на "EV-режим", выполняется управление остановкой двигателя. При этом управлении остановкой двигателя, выполняются процесс CL1-расцепления, в котором гидравлическое давление CL1 прикладывается к первой муфте CL1, зацепленной в "HEV-режиме", и процесс остановки двигателя, в котором отделенный двигатель Eng вследствие расцепления первой муфты CL1 останавливается.
[0024] Подробная конструкция автоматической трансмиссии
Фиг. 3 показывает схематичный вид примера автоматической трансмиссии AT в первом предпочтительном варианте осуществления.
Фиг. 4 показывает состояния зацепления соответствующих фрикционных элементов зацепления для соответствующих ступеней переключения передач в автоматической трансмиссии AT.
Фиг. 5 показывает пример карты переключения передач автоматической трансмиссии AT, заданной в AT-контроллере 7.
Подробная конструкция автоматической трансмиссии AT поясняется на основе фиг. 3-5.
[0025] Автоматическая трансмиссия AT представляет собой многоступенчатую трансмиссию с 7 скоростями переднего хода и 1 скоростью заднего хода. Как показано на фиг. 3, движущая сила, по меньшей мере, из одного из двигателя Eng и электромотора/генератора MG вводится из входного трансмиссионного вала Input, и механизм переключения передач, имеющий четыре шестерни планетарной передачи и семь фрикционных элементов зацепления, выполняет переключение передач для частоты вращения, и переключенная частота вращения выводится из выходного трансмиссионного вала Output.
[0026] В качестве механизма переключения передач, первый планетарный набор GS1 шестерен, включающий в себя первую шестерню G1 планетарной передачи и вторую шестерню G2 планетарной передачи, и второй планетарный набор GS2 шестерен, включающий в себя третью шестерню G3 планетарной передачи и четвертую шестерню G4 планетарной передачи, размещаются коаксиально в этой последовательности.
В качестве приводимых в действие гидравлическим давлением фрикционных элементов зацепления, размещаются первая муфта C1, вторая муфта C2, третья муфта C3, первый тормоз B1, второй тормоз B2, третий тормоз B3 и четвертый тормоз B4. Помимо этого, в качестве приводимых в действие механическим приводом элементов зацепления, размещаются первая односторонняя муфта F1 и вторая односторонняя муфта F2.
[0027] Каждая из первой шестерни G1 планетарной передачи, второй шестерни G2 планетарной передачи, третьей шестерни G3 планетарной передачи и четвертой шестерни G4 планетарной передачи представляет собой шестерню планетарной передачи с сателлитами одного типа, имеющую солнечную шестерню (S1-S4), коронную шестерню (R1-R4) и водила (PC1-PC4), поддерживающие сателлиты (P1-P4), зацепленные с обеими шестернями (S1-S4) и (R1-R4).
[0028] Входной трансмиссионный вал Input сцеплен со второй коронной шестерней R2, чтобы вводить вращающую движущую силу, по меньшей мере, из одного из двигателя Eng и электромотора/генератора MG. Выходной трансмиссионный вал Output сцеплен с третьим водилом PC3 и передает выходную вращающую движущую силу на ведущие колеса (левое и правое задние ходовые колеса RL, RR) через главную шестерню и т.д.
[0029] Первая коронная шестерня R1, второе водило PC2 и четвертая коронная шестерня R4 неразъемным образом сцеплены посредством первого рычажного элемента M1. Третья коронная шестерня R3 и четвертое водило PC4 неразъемным образом сцеплены посредством второго рычажного элемента M2. Первая солнечная шестерня S1 и вторая солнечная шестерня S2 неразъемным образом сцеплены посредством третьего рычажного элемента M3.
[0030] Фиг. 4 показывает таблицу операций зацепления. На фиг. 4, метка O указывает то, что соответствующий фрикционный элемент зацепления зацепляется под действием гидравлического давления в состоянии приведения в движение, метка (O) указывает то, что соответствующий фрикционный элемент зацепления зацепляется под действием гидравлического давления в состоянии движения по инерции (в состоянии приведения в движение, односторонняя муфта работает), а отсутствие метки указывает то, что соответствующий фрикционный элемент зацепления находится в расцепленном состоянии.
[0031] Посредством выполнения такого замещающего переключения передач, при котором из числа соответствующих фрикционных элементов зацепления, один фрикционный элемент зацепления, который зацеплен, расцепляется, а другой фрикционный элемент зацепления, который расцеплен, зацепляется, может быть реализована ступень переключения передач из 7 скоростей переднего хода и 1 скорости заднего хода, как показано на фиг. 4. Кроме того, когда во время остановки транспортного средства, операция выбора N→D, при которой диапазон переключается из диапазона нейтрали (N-диапазона) на диапазон приведения в движение (D-диапазона), который представляет собой диапазон движения, выполняется управление устранением свободного хода второго тормоза B2 (фрикционного элемента зацепления, зацепляемого в диапазоне движения). Следует отметить, что управление устранением свободного хода представляет собой управление, при котором прикладывается начальное гидравлическое давление для того, чтобы исключать зазор (свободный ход) тормозного диска второго тормоза B2. Это управление устранением свободного хода выполняется для того, чтобы обеспечивать характеристику отклика по началу движения транспортного средства, в состоянии немедленного зацепления под действием гидравлического давления второго тормоза B2, в ходе начала движения посредством операции нажатия педали акселератора. Следует отметить, что во время начала движения транспортного средства с помощью операции выбора N→D, "ступень первой скорости" получается посредством зацепления второго тормоза B2 и зацеплений односторонней муфты F1 и второй односторонней муфты F2. В таком случае второй тормоз B2 служит в качестве второй муфты CL2.
[0032] Фиг. 5 показывает карту переключения передач. Когда точка приведения в движение на карте, указываемая посредством скорости VSP транспортного средства и угла APO открытия акселератора, пересекает линию переключения коробки передач "вверх", выводится команда переключения коробки передач "вверх". Например, когда ступень переключения передач является ступенью первой скорости, и точка приведения в движение (VSP, APO) пересекает линию переключения коробки передач "вверх" 1→2, выводится команда переключения коробки передач "вверх" 1→2. Следует отметить, что фиг. 5 описывает только линии переключения коробки передач "вверх", но, конечно, линии переключения коробки передач "вниз" задаются с гистерезисом для каждой из отдельных линий переключения коробки передач "вверх".
[0033] Подробная структура процесса управления выбором N→D
Фиг. 6 показывает блок-схему последовательности операций способа, представляющую последовательность операций процесса управления выбором N→D, выполняемого в AT-контроллере 7 в первом предпочтительном варианте осуществления. В дальнейшем в этом документе поясняется каждый этап на фиг. 6, представляющем подробную структуру процесса управления выбором N→D.
[0034] На этапе S1, AT-контроллер 7 определяет то, указывает или нет сигнал из переключателя 18 режима движения то, что диапазон переключается из N-диапазона на D-диапазон, а именно, то, что выполняется управление выбором N→D. Если "Да" (управление выбором N→D выполняется), процедура переходит к этапу S2. Если "Нет" (без управления выбором N→D), процедура переходит к возврату.
[0035] На этапе S2, AT-контроллер 7 определяет то, равен или нет флаг запрещения 1, после определения на этапе S1 того, что выполняется управление выбором N→D. Если "Да" (флаг запрещения = 1), процедура переходит к этапу S5. Если "Нет" (флаг запрещения = 0), процедура переходит к этапу S3.
Следует отметить, что "флаг запрещения" представляет собой флаг, который запрещает определение начала зацепления, определяющее то, что ход поршня завершается, и начинается зацепление второго тормоза B2, когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", во время выбора N→D в HEV-режиме. Другими словами, определение завершения хода (средство определения начала зацепления), выполняемое посредством установления такого условия, что "величина варьирования крутящего момента MG > пороговое значение", является определением начала зацепления второго тормоза B2, которое начинает передачу крутящего момента приведения в движение через второй тормоз B2.
[0036] На этапе S3, AT-контроллер 7 выполняет обычное управление выбором N→D после определения на этапе S2 того, что флаг запрещения = 0, и процедура переходит к этапу S4.
Следует отметить, что "обычное управление выбором N→D" представляет собой управление устранением свободного хода второго тормоза B2 посредством регулируемого гидравлического давления, которое перезаписывается и сохраняется через управление с распознаванием во время выбора N→D.
[0037] На этапе S4, после обычного управления выбором N→D на этапе S3, разрешается управление с распознаванием хода, при котором распознается регулируемое гидравлическое давление второго тормоза B2, и процедура переходит к возврату.
Здесь следует отметить, что "управление с распознаванием хода" представляет собой управление, при котором распознается регулируемое гидравлическое давление второго тормоза B2, так что время управления устранением свободного хода от начала выбора N→D до завершения хода составляет целевое время. Другими словами, измеряется требуемое время от начала выбора N→D до завершения хода поршня, и регулируемое гидравлическое давление увеличивается на предварительно определенную распознаваемую величину в случае, если требуемое время превышает целевое время. Наоборот, в случае если требуемое время меньше целевого времени, регулируемое гидравлическое давление уменьшается на предварительно определенную распознаваемую величину. Управление с распознаванием представляет собой управление, при котором требуемое время от начала выбора N→D до завершения хода поршня сходится в целевое время посредством подвергания множество раз такой коррекции с распознаванием, как описано выше, независимо от дисперсии, ухудшения характеристик вследствие износа и т.д.
Дополнительно следует отметить, что "допуск управления с распознаванием хода" заключается в следующем: Выполняется определение завершения хода поршня (= начало зацепления), когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", во время выбора N→D в HEV-режиме, и измеряется требуемое время от начала выбора N→D до завершения хода поршня. Затем разрешается управление с распознаванием, которое корректирует регулируемое гидравлическое давление во время управления устранением свободного хода в зависимости от того, больше или меньше требуемое время целевого времени.
[0038] На этапе S5, после определения на этапе S2 того, что флаг запрещения = 1, выполняется управление с разомкнутым контуром выбором N→D, и процедура переходит к этапу S6 (средство задания гидравлического давления во время запрещения).
Здесь следует отметить, что "управление с разомкнутым контуром выбором N→D" представляет собой управление (управление с разомкнутым контуром) (средство запрещения определения), при котором в случае, если флаг запрещения, который запрещает определение начала зацепления, равен 1, регулируемое гидравлическое давление, посредством которого выполняется устранение свободного хода для второго тормоза B2 (=CL2), составляет регулируемое гидравлическое давление, превышающее обычное регулируемое гидравлическое давление (распознаваемое гидравлическое давление), которое не запрещается в течение предварительно определенного интервала времени посредством таймера устранения свободного хода.
[0039] На этапе S6, после управления с разомкнутым контуром выбором N→D на этапе S5, запрещается управление с распознаванием хода, при котором распознается регулируемое гидравлическое давление во время управления устранением свободного хода для второго тормоза B2, и процедура переходит к возврату.
Здесь следует отметить, что "запрещение определения начала зацепления" является запрещением для определения завершения хода поршня (= начала зацепления), когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", во время выбора N→D в HEV-режиме, и управление с распознаванием хода не выполняется. Следует отметить, что когда управление с распознаванием хода запрещается, завершение управления устранением свободного хода определяется из истечения времени таймера устранения свободного хода.
[0040] Подробная структура процесса задания флагов запрещения
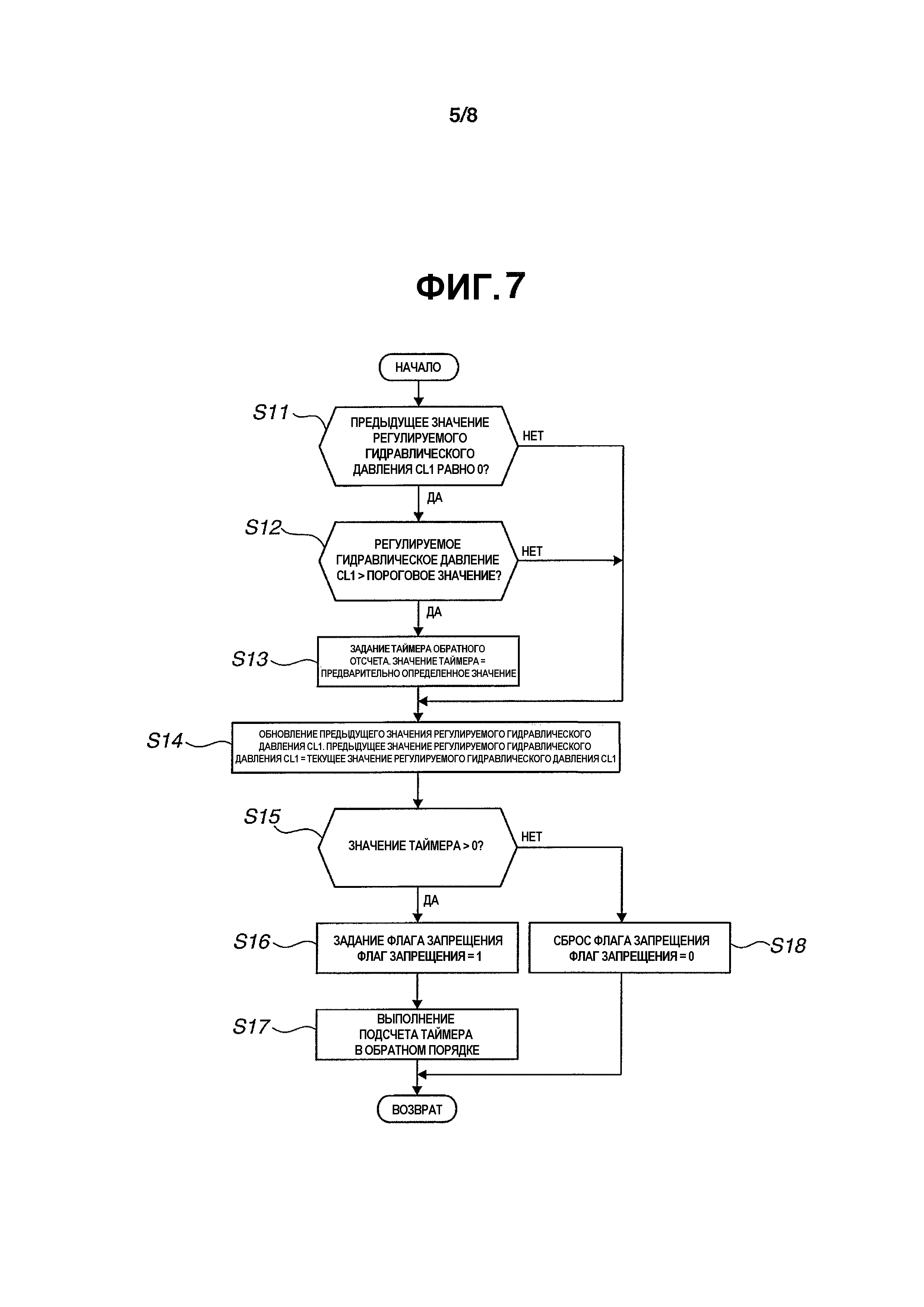
Фиг. 7 показывает блок-схему последовательности операций способа, представляющую последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере 7 в первом предпочтительном варианте осуществления. Ниже поясняется каждый этап на фиг. 7, представляющем подробную структуру процесса задания флагов запрещения.
[0041] На этапе S11, AT-контроллер 7 определяет то, равно или нет 0 предыдущее значение регулируемого гидравлического давления CL1 для первой муфты CL1 (предыдущее значение регулируемого гидравлического давления CL1 = 0). Если "Да" (предыдущее значение регулируемого гидравлического давления CL1 = 0), процедура переходит к этапу S12. Если "Нет" (предыдущее значение регулируемого гидравлического давления CL1 ≠ 0), процедура переходит к этапу S14.
[0042] На этапе S12, AT-контроллер 7 определяет то, превышает или нет регулируемое гидравлическое давление CL1 пороговое значение, после определения на этапе S11 того, что предыдущее значение регулируемого гидравлического давления CL1 = 0. Если "Да" ("регулируемое гидравлическое давление CL1 > пороговое значение"), процедура переходит к этапу S13. Если "Нет" ("регулируемое гидравлическое давление CL1 ≤ пороговое значение"), процедура переходит к этапу S14. Следует отметить, что "пороговое значение" задается равным значению регулируемого гидравлического давления, которое предоставляет гидравлическое давление, эквивалентное расцеплению первой муфты CL1 нормально закрытого типа.
[0043] На этапе S13, AT-контроллер 7 задает таймер обратного отсчета равным предварительно определенному значению после определения на этапе S12 того, что "регулируемое гидравлическое давление CL1 > пороговое значение", и процедура переходит к этапу S14.
Следует отметить, что предварительно определенное значение задается на основе времени, требуемого для определения того, что двигатель Eng не находится в режиме полной сгорания, в ходе управления остановкой двигателя, выполняемого наряду с переключением режима из HEV-режима в EV-режим.
[0044] На этапе S14, AT-контроллер 7 обновляет предыдущее значение регулируемого гидравлического давления CL1 после определения на этапе S11 того, что регулируемое гидравлическое давление CL1 ≠ 0, после определения на этапе S12 того, что "регулируемое гидравлическое давление CL1 ≤ пороговое значение", или после определения на этапе S13 того, что таймер обратного отсчета задается, и процедура переходит к этапу S15. Следует отметить, что предыдущее значение регулируемого гидравлического давления CL1 обновляется следующим образом.
Предыдущее значение регулируемого гидравлического давления CL1 = текущее значение регулируемого гидравлического давления CL1.
[0045] На этапе S15, AT-контроллер 7 определяет то, составляет или нет значение таймера, заданное на этапе S13, значение таймера > 0, после обновления предыдущего значения регулируемого гидравлического давления CL1 на этапе S14.
Если "Да" (значение таймера > 0), процедура переходит к этапу S16. Если "Нет" (значение таймера = 0), процедура переходит к этапу S18.
[0046] На этапе S16, AT-контроллер 7 задает флаг запрещения, представляющий запрещение определения начала зацепления, равным 1 после определения на этапе S15 того, что значение таймера > 0, и процедура переходит к этапу S17. Следует отметить, что "флаг запрещения" представляет собой флаг, используемый на этапе S2 на фиг.6, который запрещает определение начала зацепления, определяющее то, что ход поршня завершается, и начинается зацепление второго тормоза B2, когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение" во время выбора N→D в HEV-режиме.
[0047] На этапе S17, AT-контроллер 7 выполняет подсчет таймера в обратном порядке, при этом значение таймера снижается в течение для того из периодов процесса, после того, как флаг запрещения задан на этапе S16, и процедура переходит к возврату.
[0048] На этапе S18, AT-контроллер 7 сбрасывает флаг запрещения, представляющий запрещение определения начала зацепления (флаг запрещения = 0), после определения на этапе S15 того, что значение таймера = 0, и процедура переходит к возврату.
[0049] Далее поясняется последовательность операций.
Последовательность операций для устройства управления для автоматической трансмиссии AT в первом предпочтительном варианте осуществления поясняется с секционированием пояснения на разделы "Последовательность операций в процессе управления выбором N→D", "Последовательность операций в процессе задания флагов запрещения" и "Последовательность операций при вмешательстве в изменение режима во время управления выбором N→D".
[0050] Последовательность операций в процессе управления выбором N→D
Во время управления выбором N→D, которое зацепляет второй тормоз B2, управление переключением из HEV-режима в EV-режим вмешивается, так что соответствующие элементы управления взаимно перекрываются и выполняются. В это время, необходимо запрещать определение начала зацепления согласно постоянному условию, поскольку определение начала зацепления ошибочно определяется. В дальнейшем в этом документе поясняется последовательность операций в процессе управления выбором N→D, которая рассматривает этот вопрос.
[0051] Когда выполняется управление выбором N→D, и флаг запрещения равен 0, повторяется последовательность операций с прохождением через "этап S1 → этап S2 → этап S3 → этап S4 → возврат", показанная на фиг. 6. На этапе S3, выполняется обычное управление выбором N→D, при котором управление устранением свободного хода для второго тормоза B2 выполняется согласно регулируемому гидравлическому давлению, перезаписанному и сохраненному посредством управления с распознаванием во время выбора N→D.
На этапе S4, разрешается управление с распознаванием хода для того, чтобы распознавать регулируемое гидравлическое давление второго тормоза B2.
[0052] Следовательно, когда выполняется управление выбором N→D в HEV-режиме, и флаг запрещения = 0, завершение хода поршня определяется, когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", и измеряется требуемое время (время управления устранением свободного хода) от момента, когда начинается выбор N→D, до завершения хода поршня. Затем регулируемое гидравлическое давление во время управления устранением свободного хода корректируется с распознаванием в зависимости от того, больше или меньше требуемое время целевого времени.
[0053] С другой стороны, когда выполняется управление выбором N→D, и флаг запрещения равен 1 на блок-схеме последовательности операций способа по фиг. 6, повторяется последовательность операций в виде "этап S1 → этап S2 → этап S5 → этап S6 → возврат". На этапе S5, выполняется управление с разомкнутым контуром выбором N→D, при котором регулируемое гидравлическое давление, которое выполняет устранение свободного хода для второго тормоза B2 (= CL2), выше обычного регулируемого гидравлического давления (распознаваемого гидравлического давления). На этапе S6, запрещается управление с распознаванием хода, при котором распознается регулируемое гидравлическое давление во время управления устранением свободного хода второго тормоза B2.
[0054] Следовательно, когда выполняется управление выбором N→D, и флаг запрещения = 1, запрещается определение того, что ход поршня завершается, когда устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", во время выбора N→D в HEV-режиме.
[0055] Как описано выше, в первом предпочтительном варианте осуществления, в случае если возникает переключение из HEV-режима в EV-режим, и до определения того, что второй тормоз B2 начал зацепление, запрещается определение начала зацепления согласно установлению такого условия, что "величина варьирования крутящего момента MG > пороговое значение".
[0056] Другими словами, электромотор/генератор MG подвергается такому управлению по числу оборотов, при котором входное число оборотов автоматической трансмиссии AT становится постоянным во время HEV-режима (WSC-режима) во время остановки транспортного средства. Когда, в это время, начинается зацепление второго тормоза B2, увеличивается нагрузка, прикладываемая к электромотору/генератору MG. Тем не менее, крутящий момент электромотора/генератора MG увеличивается таким образом, что управление числом оборотов поддерживается с тем, чтобы поддерживать входное число оборотов постоянным независимо от увеличения этой нагрузки. Следовательно, когда нагрузка электромотора/генератора MG увеличивается на предварительно определенную величину, и устанавливается такое условие, что "величина варьирования крутящего момента MG > пороговое значение", может выполняться определение того, что ход поршня завершается, и второй тормоз B2 начал зацепление.
[0057] Тем не менее, когда возникает переключение из HEV-режима в EV-режим, выполняется процесс остановки двигателя и процесс разделения между двигателем Eng и электромотором/генератором MG. Таким образом, нагрузка электромотора/генератора MG варьируется независимо от начала зацепления второго тормоза B2. Следовательно, когда управление устранением свободного хода для второго тормоза B2 выполняется в ответ на начало выбора N→D, вмешивается переключение из HEV-режима в EV-режим. В этом случае, варьирование нагрузки электромотора/генератора MG, которое возникает вследствие процесса остановки двигателя и т.д., ошибочно определяется в качестве варьирования нагрузки вследствие начала зацепления второго тормоза B2.
[0058] Следовательно, когда переключение режима из HEV-режима в EV-режим возникает во время управления выбором N→D, и флаг запрещения задается равным 1, определение начала зацепления для второго тормоза B2 вследствие варьирования нагрузки электромотора/генератора MG не выполняется. Следовательно, может не допускаться ошибочное определение варьирования нагрузки электромотора/генератора MG, которое образуется наряду с переключением режима из HEV-режима в EV-режим, как начала зацепления второго тормоза B2.
[0059] В первом предпочтительном варианте осуществления, когда флаг запрещения = 1 во время управления выбором N→D, процедура переходит к этапу S5. На этапе S5, приспосабливается такое управление с разомкнутым контуром выбором N→D, при котором регулируемое гидравлическое давление второго тормоза B2 выше гидравлического давления, которое не запрещается в течение предварительно определенного интервала времени посредством таймера устранения свободного хода.
Согласно этой структуре, описанной выше, в случае если запрещается определение начала зацепления для второго тормоза B2 (флаг запрещения = 1), управление устранением свободного хода для второго тормоза B2 завершается во время, меньшее целевого времени при обычном управлении выбором N→D.
Следовательно, даже в случае, если начало зацепления второго тормоза B2 не может определяться из величины варьирования нагрузки электромотора/генератора MG, может быть гарантировано состояние, в котором начинается зацепление второго тормоза B2 (состояние, в котором завершается устранение свободного хода второго тормоза B2).
[0060] Последовательность операций в процессе задания флагов запрещения
Как описано выше, когда возникает переключение из HEV-режима в EV-режим, флаг запрещения задается равным 1 вследствие конкретного условия, представляющего то, что возникает переключение режима. В дальнейшем в этом документе поясняется последовательность операций в процессе задания флагов запрещения по первому варианту осуществления с использованием условия расцепления первой муфты CL1 в качестве конкретного условия, представляющего переключение режима.
[0061] Когда устанавливается такое условие, что предыдущее значение регулируемого гидравлического давления CL1 = 0, и "регулируемое гидравлическое давление CL1 (текущее значение) > пороговое значение", на основе команды перехода из HEV-режима в EV-режим на блок-схеме последовательности операций способа по фиг. 7, процедура выполняется в последовательности "этап S11 → этап S12 → этап S13 → этап S14 → этап S15 → этап S16 → этап S17 → возврат". На этапе S13, таймер обратного отсчета задается равным предварительно определенному значению. На этапе S16, после определения на этапе S15 того, что значение таймера > 0, флаг запрещения, представляющий запрещение определения начала зацепления, задается равным 1.
[0062] Затем до тех пор, пока значение таймера не станет равным 0 от последующего периода управления, на блок-схеме последовательности операций способа на фиг. 7 повторяется последовательность операций в виде "этап S11 → этап S14 → этап S15 → этап S16 → этап S17 → возврат", так что флаг запрещения поддерживается = 1. Кроме того, когда значение таймера = 0, на блок-схеме последовательности операций способа на фиг. 7, повторяется последовательность операций в виде "этап S11 → этап S14 → этап S15 → этап S18 → возврат". На этапе S18, флаг запрещения сбрасывается до 0 (флаг запрещения = 0).
[0063] В первом предпочтительном варианте осуществления, приспосабливается такая структура, при которой в случае, если первая муфта CL1 начала расцепление до определения того, что второй тормоз B2 начал зацепление, флаг запрещения, запрещающий определение начала зацепления, задается равным 1 (флаг запрещения = 1).
Другими словами, когда выполняется переключение из HEV-режима в EV-режим, начинается управление расцеплением муфты, при котором расцепляется первая муфта CL1, размещенная между двигателем Eng и электромотором/генератором MG. Следовательно, посредством запрещения определения начала зацепления, когда первая муфта CL1 начала расцепление, варьирование нагрузки электромотора/генератора MG, которое формируется, когда может не допускаться ошибочное определение переключения из HEV-режима в EV-режим в качестве начала зацепления.
[0064] Последовательность операций при вмешательстве в изменение режима во время управления выбором N→D
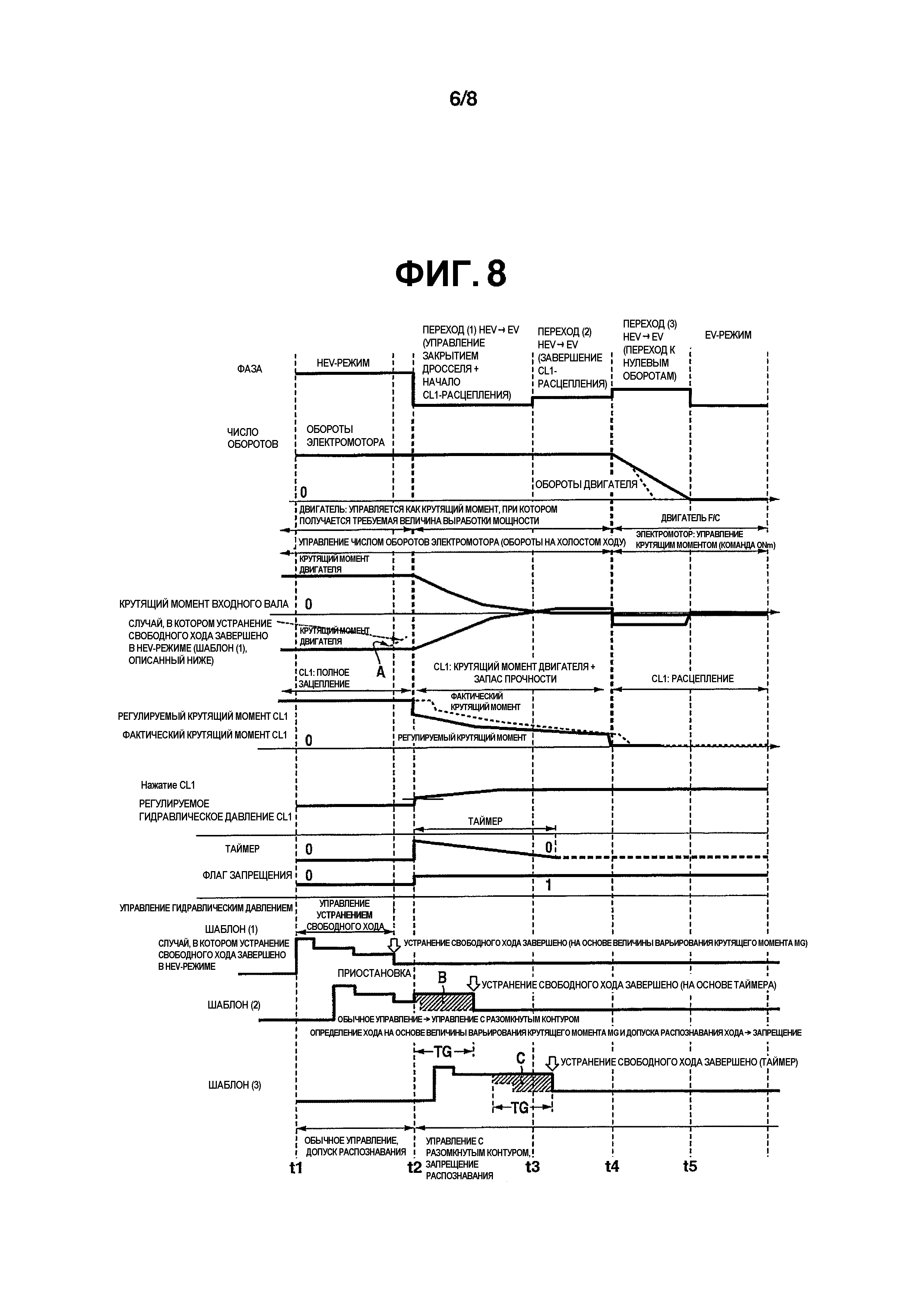
Фиг. 8 показывает временную диаграмму, представляющую каждую характеристику в случае, если переключение из HEV-режима в EV-режим вмешивается во время управления выбором N→D в случае, если остановлено гибридное транспортное средство, в котором монтируется устройство управления в первом предпочтительном варианте осуществления. В дальнейшем в этом документе, последовательность операций при вмешательстве в изменение режима во время управления выбором N→D.
[0065] На временной диаграмме по фиг. 8, t1 обозначает время, в которое начинается управление выбором N→D в шаблоне (1) в HEV-режиме; t2 обозначает время, в которое остановка двигателя и CL1-расцепление начинаются на основе команды изменения режима с HEV-режима на EV-режим; t3 обозначает время, в которое завершается переход через нуль крутящего момента двигателя и крутящего момента электромотора; t4 обозначает время, в которое начинается переход через нуль оборотов для числа оборотов двигателя и числа оборотов электромотора; t5 обозначает время, в которое завершается переход через нуль оборотов, и в которое начинается EV-режим.
[0066] Время t1 - время t2 является фазой выработки мощности двигателя в HEV-режиме. Например, когда устанавливается такое условие завершения заряда для батареи 4 во время t2, выводится сигнал перехода фазы из HEV-режима в EV-режим. В этой фазе, с числом оборотов на холостом ходу двигателя Eng в качестве целевого числа оборотов, электромотор/генератор MG подвергается такому управлению по числу оборотов, чтобы поддерживать число оборотов на холостом ходу. Крутящий момент двигателя управляется как крутящий момент, при котором получается выработка требуемой мощности, и крутящий момент электромотора управляется как отрицательный крутящий момент (крутящий момент рекуперации), при котором крутящий момент двигателя преобразован в энергию для выработки мощности. Управляющий крутящий момент CL1 и фактический крутящий момент CL1 являются крутящим моментом, поддерживающим зацепление первой муфты CL1. Регулируемое гидравлическое давление CL1 поддерживается равным нулевому давлению. Поскольку первая муфта CL1 находится в состоянии зацепления, значение таймера и флаг запрещения задаются равными 0. Фаза выработки мощности двигателя в HEV-режиме во время t1 - время t2 является интервалом времени обычного управления и допуска распознавания.
[0067] Время t2 - время t3 является фазой для фазы (1) перехода HEV→EV. Во время t2 процесс остановки двигателя и процесс расцепления первой муфты начинаются. Если во время t3 переход через нуль крутящего момента двигателя и крутящего момента электромотора завершается, фаза переходит в последующую фазу. В этой фазе, после времени t1 - времени t2, с числом оборотов на холостом ходу двигателя Eng в качестве целевого числа оборотов, управление числом оборотов электромотора/генератора MG поддерживается с тем, чтобы поддерживать число оборотов на холостом ходу. Крутящий момент двигателя управляется таким образом, что крутящий момент постепенно уменьшается вследствие управления закрытием дросселя, и крутящий момент электромотора управляется таким образом, что крутящий момент постепенно повышается синхронно с крутящим моментом двигателя.
Регулируемый крутящий момент CL1 и фактический крутящий момент CL1 управляются таким образом, что отклик фактического крутящего момента CL1 задержан относительно регулируемого крутящего момента CL1, но управляется с возможностью уменьшаться в направлении, в котором постепенно расцепляется первая муфта CL1. Регулируемое гидравлическое давление CL1 повышается пошагово во время t2 и после этого постепенно повышается в направлении времени t3. Таймер задается равным предварительно определенному значению, когда таймер превышает пороговое значение вследствие повышения регулируемого гидравлического давления CL1, и постепенно уменьшается в направлении времени t3. Флаг запрещения задается равным 1 (флаг запрещения = 1) начиная со значения таймера > 0. Фаза (1) перехода HEV→EV для времени t2 - времени t3 предоставляет интервал времени управления с разомкнутым контуром и запрещения распознавания.
[0068] Время t3 - время t4 является фазой (2) перехода HEV→EV. Когда переход через нуль крутящего момента двигателя и крутящего момента электромотора завершается во время t3, продолжение процесса расцепления первой муфты приводит к завершению расцепления первой муфты CL1 во время t4, и фаза переходит в последующую фазу. В этой фазе, после времени t1 - времени t3, с числом оборотов на холостом ходу двигателя Eng в качестве целевого числа оборотов, управление числом оборотов для электромотора/генератора MG поддерживается с тем, чтобы поддерживать число оборотов на холостом ходу. Нулевой крутящий момент поддерживается для крутящего момента двигателя, и крутящий момент электромотора управляется как крутящий момент, соответствующий нагрузке на двигатель. Регулируемый крутящий момент CL1 и фактический крутящий момент CL1 управляются таким образом, что регулируемый крутящий момент CL1 указывает нуль во время t4, хотя отклик фактического крутящего момента CL1 задержан относительно регулируемого крутящего момента CL1. Регулируемое гидравлическое давление CL1 поддерживает гидравлическое давление во время t3. Таймер становится нулем во время немного после времени t3. Флаг запрещения на основе таймера сбрасывается в то время, когда этот таймер указывает нуль. Тем не менее, в первом предпочтительном варианте осуществления, когда выполняется такое управление (не показано), при котором определение информации флага, что в двигателе не происходит полное сгорание (флаг, указывающий то, что двигатель находится в состоянии полного сгорания, деактивируется) во время t3, флаг запрещения = 1, и после времени t3, флаг запрещения поддерживается равным 1.
[0069] Время t4 - время t5 является фазой (3) перехода HEV→EV. Когда расцепление первой муфты CL1 завершается во время t4, выполняется управление уменьшением оборотов двигателя и оборотов электромотора. Затем во время t4, переход нулевого оборота завершается, и фаза переходит в последующую фазу.
В этой фазе управление переходит от управления числом оборотов электромотора/генератора MG от времени t1 - времени t4 к управлению крутящим моментом (команда ONm) электромотора/генератора MG, и во время t5, число оборотов электромотора обнуляется. Число оборотов двигателя обнуляется раньше времени t5 вследствие управления в режиме отсечки топлива двигателя Eng. Крутящий момент двигателя предоставляет отрицательный крутящий момент вследствие управления в режиме отсечки топлива, и крутящий момент электромотора поддерживает нулевой крутящий момент, который представляет собой цель управления крутящим моментом. Регулируемый крутящий момент CL1 и фактический крутящий момент CL1 поддерживаются равными нулю, что представляет расцепленное состояние первой муфты CL1. Регулируемое гидравлическое давление CL1 поддерживает гидравлическое давление во время t4. Флаг запрещения остается равным 1 на основе такой информации, что двигатель Eng не находится в состоянии полного сгорания. Затем после времени t5 транспортное средство подготавливается к началу движения транспортного средства в ответ на операцию нажатия педали акселератора в EV-режиме. В EV-режиме после времени t5 с момента, когда транспортное средство остановлено. Таким образом, число оборотов равно нулю, и определение хода на основе величины варьирования крутящего момента MG не может выполняться (обороты не варьируются, даже если выполняется зацепление муфты).
Следовательно, определение хода задается как "запрещение".
[0070] При управлении выбором N→D, после перехода в EV-режим, чтобы подготавливаться к началу движения транспортного средства за счет операции нажатия педали акселератора, и чтобы увеличивать характеристику отклика по началу посредством зацепления второго тормоза B2 без задержки в отклике по гидравлическому давлению, выполняется управление устранением свободного хода для второго тормоза B2. В этом случае, поскольку времена начала устранения свободного хода и конца устранения свободного хода отличаются, предоставляются следующие три шаблона (шаблон (1), шаблон (2) и шаблон (3)), как показано в характеристиках управления гидравлическим давлением в нижней части фиг.8.
[0071] Шаблон (1)
В шаблоне (1), в котором времена начала устранения свободного хода и конца устранения свободного хода находятся до управления с разомкнутым контуром (запрещением распознавания), управление устранением свободного хода начинается во время t1, и управление устранением свободного хода заканчивается (завершается) во время до времени t2, а именно, управление устранением свободного хода завершается во время HEV-режима. Следовательно, обычное управление выбором N→D и управление с распознаванием хода разрешаются, и завершение устранения свободного хода (определение начала зацепления) подтверждается посредством установления условия "величина варьирования крутящего момента MG > пороговое значение", как показано посредством метки A со стрелкой на фиг. 8.
[0072] Шаблон (2)
В шаблоне (2), в котором время начала устранения свободного хода находится до управления с разомкнутым контуром (запрещением распознавания), но время завершения устранения свободного хода находится после управления с разомкнутым контуром (запрещения распознавания), управление устранением свободного хода начинается во время до времени t2, и управление устранением свободного хода завершается во время после времени t2, а именно, управление переключением режима и управление устранением свободного хода частично перекрываются. Следовательно, если определение завершения устранения свободного хода (определение начала зацепления) выполняется посредством установления такого условия, что "величина варьирования крутящего момента MG > пороговое значение", имеется вероятность ошибочного определения. Следовательно, во время t2, управление изменяется с обычного управления выбором N→D на управление с разомкнутым контуром выбором N→D, и управление с распознаванием хода запрещается. Таким образом, может не допускаться ошибочное определение определения начала зацепления.
Следует отметить, что определение завершения устранения свободного хода выполняется посредством прохождения времени таймера TG устранения свободного хода, и заштрихованная область, обозначаемая посредством B на фиг. 8, представляет собой часть, которая имеет более высокое давление по сравнению с регулируемым гидравлическим давлением при обычном управлении.
[0073] Шаблон (3)
В шаблоне (3), в котором время начала устранения свободного хода находится после управления с разомкнутым контуром (запрещения распознавания), устранение свободного хода (управление) начинается во время после времени t2, и устранение свободного хода (управление) завершается во время после времени t3, а именно, управление переключением режима и управление устранением свободного хода взаимно перекрываются. Следовательно, если определение завершения устранения свободного хода (определение начала зацепления) выполняется посредством установления такого условия, что "величина варьирования крутящего момента MG > пороговое значение", имеется вероятность ошибочного определения. Таким образом, во время t2, управление изменяется с обычного управления выбором N→D на управление с разомкнутым контуром выбором N→D, и управление с распознаванием хода запрещается. Следовательно, может не допускаться ошибочное определение как определения начала зацепления. Следует отметить, что определение завершения устранения свободного хода выполняется посредством прохождения времени таймера TG устранения свободного хода, и заштрихованная область, показанная в C по фиг. 8, представляет собой часть, которая выше регулируемого гидравлического давления при обычном управлении.
[0074] Далее поясняется преимущество устройства управления в первом варианте осуществления. Устройство управления для автоматической трансмиссии AT в первом предпочтительном варианте осуществления имеет следующие преимущества.
[0075] (1) Устройство управления для автоматической трансмиссии AT, в которую вводятся движущие силы из источников приведения в движение, включающих в себя двигатель Eng и электромотор (электромотор/генератор MG), содержит: фрикционный элемент зацепления (второй тормоз B2), зацепляемый в диапазоне движения (D-диапазоне); средство определения начала зацепления (этапы S2→S3→S4 на фиг.6) для определения того, что фрикционный элемент зацепления (второй тормоз B2) начал зацепление в случае, если нагрузка электромотора (электромотора/генератора MG) увеличивается на предварительно определенную величину во время управления числом оборотов, при котором число оборотов входного вала IN автоматической трансмиссии AT управляется как предварительно определенное целевое число оборотов, и когда выбирается диапазон движения (выбор N→D), чтобы зацеплять фрикционный элемент зацепления (второй тормоз B2) в расцепленном состоянии; и средство запрещения определения (этапы S2→S5→S6 на фиг. 6) для запрещения определения средством определения начала зацепления до определения того, что фрикционный элемент зацепления (второй тормоз B2) начал зацепление, и в случае если возникает переключение из HEV-режима, в котором движущие силы двигателя Eng и электромотора (электромотора/генератора MG) вводятся на входной вал IN, в EV-режим, в котором только движущая сила электромотора (электромотора/генератора) вводится на входной вал IN.
Следовательно, может не допускаться ошибочное определение варьирования нагрузки электромотора (электромотора/генератора MG), которое развивается вследствие переключения из HEV-режима в EV-режим, как начала зацепления фрикционного элемента зацепления (второго тормоза B2).
[0076] (2) Устройство управления для автоматической трансмиссии AT дополнительно содержит: средство задания гидравлического давления во время запрещения (этап S5 по фиг. 6) для задания регулируемого гидравлического давления в фрикционном элементе зацепления (втором тормозе B2) превышающим давление в случае незапрещения в течение предварительно определенного интервала времени (таймер TG устранения свободного хода), в случае если определение запрещается средством запрещения определения (этапы S2→S5→S6 на фиг. 6).
Следовательно, помимо преимущества, описанного в (1), даже в случае, если начало зацепления фрикционного элемента зацепления (второго тормоза B2) не может определяться из величины варьирования нагрузки электромотора/генератора MG, может быть гарантировано состояние, в котором завершено устранение свободного хода фрикционного элемента зацепления (второго тормоза B2).
[0077] (3) В устройстве управления для автоматической трансмиссии AT, средство запрещения определения (этап S2 на фиг. 6, фиг. 7) запрещает определение средством определения начала зацепления (этап S16 на фиг. 7) до определения того, что начинается зацепление фрикционного элемента зацепления (второго тормоза B2), и в случае если элемент зацепления (первая муфта CL1), размещенный между двигателем Eng и электромотором (электромотором/генератором MG), начал расцепление.
Следовательно, в дополнение к преимуществам (1) и (2), определение начала зацепления запрещается, когда элемент зацепления (первая муфта CL1) начал расцепление.
Таким образом, может не допускаться ошибочное определение варьирования нагрузки электромотора/генератора MG, которое развивается вследствие переключения режима из HEV-режима в EV-режим, как начала зацепления.
Другими словами, когда режим переключается из HEV-режима в EV-режим, начинается управление расцеплением элемента зацепления (первой муфты CL1), размещенного между двигателем Eng и электромотором (электромотором/генератором MG). С учетом этого аспекта, определение начала зацепления согласно величине варьирования крутящего момента MG запрещается.
Второй вариант осуществления
[0078] Во втором предпочтительном варианте осуществления, определение начала зацепления согласно величине варьирования крутящего момента MG запрещается в случае, если обнаруживается сигнал перехода фазы из HEV-режима в EV-режим.
[0079] Во-первых, поясняется структура.
Подробная структура процесса задания флагов запрещения
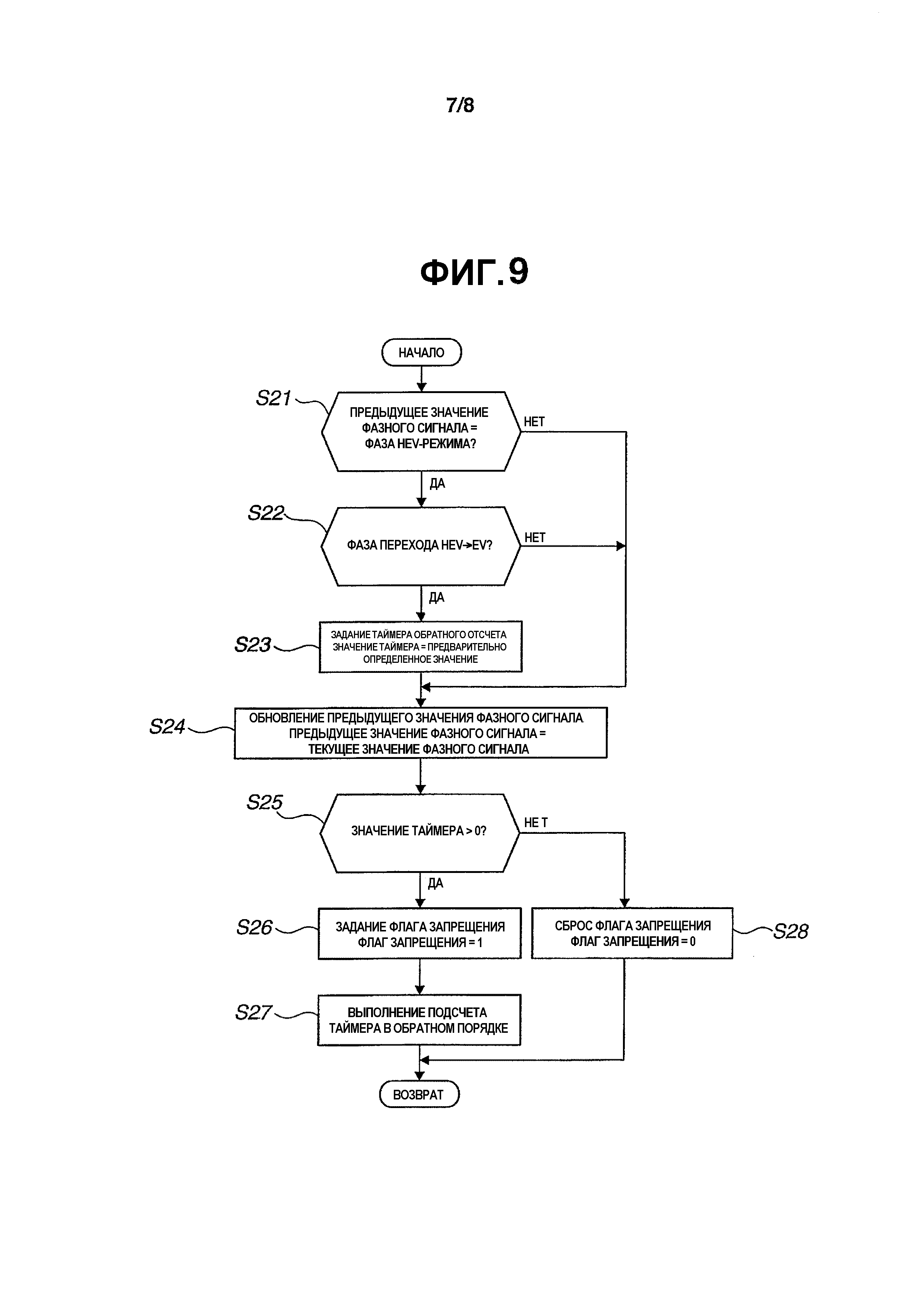
Фиг. 9 показывает блок-схему последовательности операций способа, представляющую последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере 7 во втором предпочтительном варианте осуществления.
Ниже поясняется каждый этап на фиг. 9, представляющем подробную структуру процесса задания флагов запрещения. Следует отметить, что поскольку каждый этап в отношении этапа S23 и этапов S25-S28 соответствует каждому этапу в отношении этапа S13 и этапов S15-S18 на фиг. 7, их пояснение в данном документе опускается.
[0080] На этапе S21, AT-контроллер 7 определяет то, представляет или нет предыдущее значение фазового сигнала фазу HEV-режима. Если "Да" (предыдущее значение фазового сигнала = фаза HEV-режима), процедура переходит к этапу S22. Если "Нет" (предыдущее значение фазового сигнала ≠ фаза HEV-режима), процедура переходит к этапу S24.
[0081] На этапе S22, AT-контроллер 7 определяет то, указывает или нет фазовый сигнал фазу перехода HEV→EV, после определения на этапе S21 того, что "предыдущее значение фазового сигнала = фаза HEV-режима".
Если "Да" (фаза перехода HEV→EV), процедура переходит к этапу S23. Если "Нет" (не фаза перехода HEV→EV), процедура переходит к этапу S24.
[0082] На этапе S24, после определения на этапе S21 того, что "предыдущее значение фазового сигнала ≠ фаза HEV-режима", последующего определения на этапе S22 того, что "не в фазе перехода HEV-режим → EV-режим", или после задания таймера обратного отсчета на этапе S23, AT-контроллер 7 обновляет предыдущее значение фазового сигнала, и процедура переходит к этапу S25. Следует отметить, что предыдущее значение фазового сигнала обновляется в качестве "предыдущее значение фазового сигнала = текущее значение фазового сигнала".
Следует отметить, что другая структура во втором предпочтительном варианте осуществления является идентичной структуре по фиг. 1-6 в первом предпочтительном варианте осуществления, ее пояснение и обозначение на чертежах в данном документе опускается.
[0083] Далее поясняется последовательность операций второго предпочтительного варианта осуществления.
Последовательность операций в процессе задания флагов запрещения
Как описано выше, когда возникает переключение режима из HEV-режима в EV-режим, флаг запрещения задается равным 1 в зависимости от конкретного условия, указывающего то, что режим переключается. В дальнейшем в этом документе, в качестве конкретного условия, при котором переключается режим, поясняется последовательность операций в процессе задания флагов запрещения во втором предпочтительном варианте осуществления с использованием условия определения сигнала перехода фазы HEV-режима в EV-режим.
[0084] Если такие условия, "что предыдущее значение фазового сигнала = фаза HEV-режима", и что "фаза перехода HEV→EV" устанавливаются на блок-схеме последовательности операций способа на фиг. 9, процедура выполняется следующим образом: этап S21 → этап S22 → этап S23 → этап S24 → этап S25 → этап S26 → этап S27 → возврат. На этапе S23, таймер обратного отсчета задается в качестве "значение таймера = предварительно определенное значение". На этапе S26, после определения на этапе S25 того, что "значение таймера > 0", флаг запрещения задается равным 1, что представляет запрещение определения начала зацепления.
[0085] Затем в течение временного интервала со времени, в которое начинается последующий период управления, до времени, в которое значение таймера становится нулем, на блок-схеме последовательности операций способа по фиг. 9 повторяется последовательность операций в виде "этап S21 → этап S24 → этап S25 → этап S26 → этап S27 → возврат", и поддерживается флаг запрещения = 1. Кроме того, когда "значение таймера = 0", на блок-схеме последовательности операций способа по фиг.9, повторяется последовательность операций в виде "этап S21 → этап S24 → этап S25 → этап S28 → возврат". На этапе S28, после определения на этапе S25 того, что "значение таймера = 0", флаг запрещения сбрасывается до 0 (флаг запрещения = 0).
[0086] Во втором варианте осуществления, до определения того, что начинается зацепление второго тормоза B2, и в случае если обнаруживается сигнал перехода фазы из HEV-режима в EV-режим, флаг запрещения, представляющий запрещение определения начала зацепления, задается равным 1.
Другими словами, переключение режима из HEV-режима в EV-режим возникает на основе сигнала перехода фазы из HEV-режима в EV-режим. Таким образом, когда обнаруживается сигнал перехода фазы из HEV-режима в EV-режим, определение начала зацепления запрещается. Следовательно, может не допускаться ошибочное определение варьирования нагрузки электромотора-генератора, которое развивается вследствие переключения режима из HEV-режима в EV-режим, как начала зацепления.
Следует отметить, что остальная последовательность операций второго варианта осуществления является идентичной первому варианту осуществления, и в силу этого ее пояснение в данном документе опускается.
[0087] Далее поясняется преимущество.
Устройство управления для автоматической трансмиссии AT во втором предпочтительном варианте осуществления позволяет получать следующее преимущество.
[0088] (4) Вышеописанное средство запрещения определения (этап S2 на фиг. 6, фиг. 9) запрещает определение средством определения начала зацепления (этап S26 на фиг. 9) до определения того, что начинается зацепление фрикционного элемента зацепления (второго тормоза B2), и в случае если обнаруживается сигнал перехода фазы из HEV-режима в EV-режим.
Следовательно, в дополнение к преимуществам (1) или (2) в первом предпочтительном варианте осуществления, когда обнаруживается сигнал перехода фазы из HEV-режима в EV-режим, определение начала зацепления запрещается. Таким образом, может не допускаться ошибочное определение варьирования нагрузки электромотора/генератора MG, которое развивается вследствие переключения режима из HEV-режима в EV-режим, как начала зацепления. Другими словами, на основе сигнала перехода фазы из HEV-режима в EV-режим, возникает переключение из HEV-режима в EV-режим. В свете этого аспекта, запрещается определение начала зацепления согласно величине варьирования крутящего момента MG.
Третий вариант осуществления
[0089] В третьем предпочтительном варианте осуществления, определение начала зацепления согласно величине варьирования крутящего момента MG запрещается в случае, если обнаруживается то, что начался процесс остановки двигателя.
[0090] Во-первых, поясняется структура в третьем предпочтительном варианте осуществления.
Подробная структура процесса задания флагов запрещения
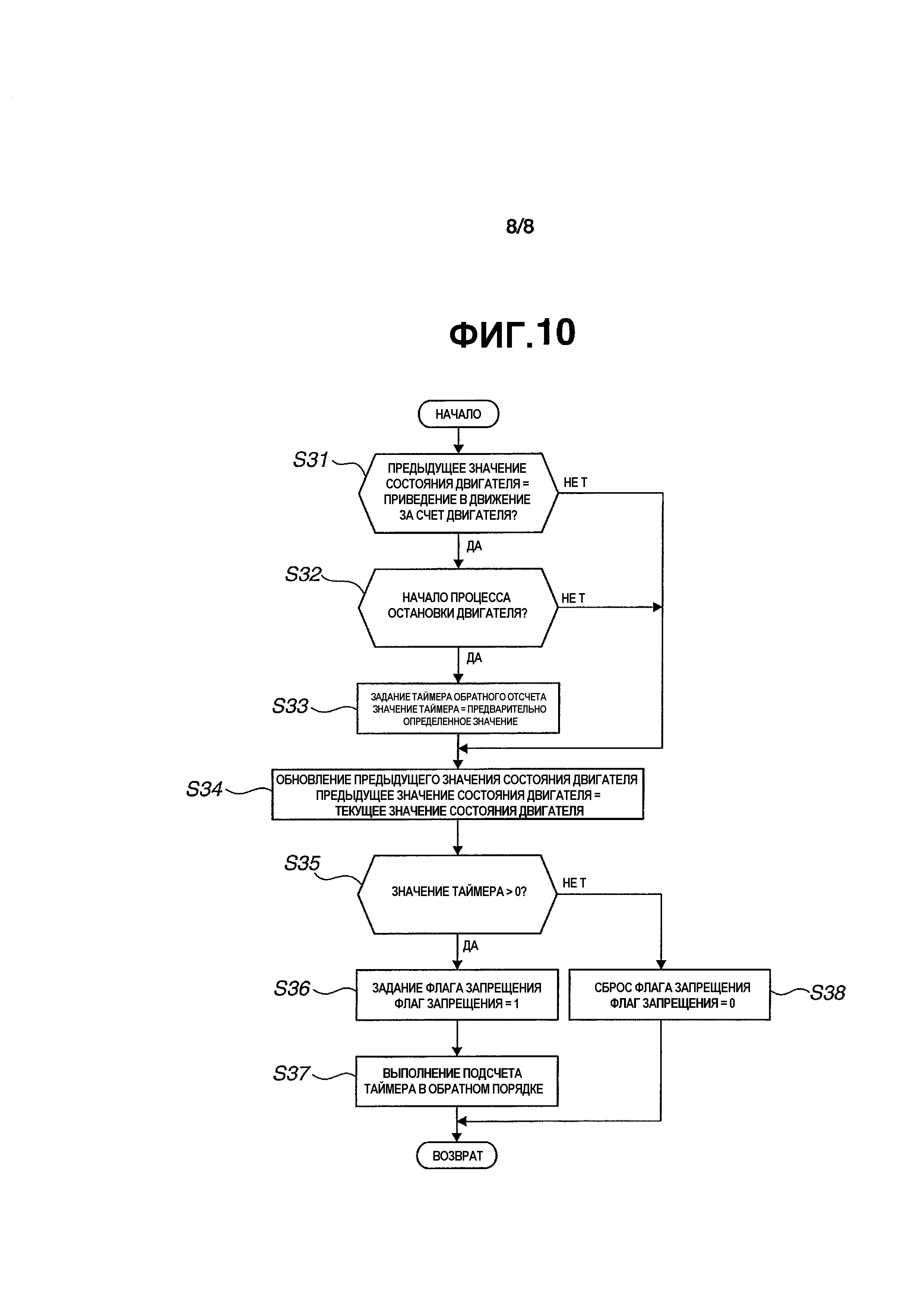
Фиг. 10 показывает блок-схему последовательности операций способа, представляющую последовательность операций процесса задания флагов запрещения, выполняемого в AT-контроллере 7 в третьем предпочтительном варианте осуществления. Ниже поясняется каждый этап на фиг. 10, представляющем подробную структуру процесса задания флагов запрещения. Следует отметить, что поскольку каждый этап в отношении этапа S33 и этапов S35-S38 соответствует этапу S13 и этапам S15-S18 на фиг. 7, их пояснение в данном документе опускается.
[0091] На этапе S31, AT-контроллер 7 определяет то, представляет собой или нет предыдущее значение состояния двигателя состояние во время приведения в движение за счет двигателя. Если "Да" ("предыдущее значение состояния двигателя = во время приведения в движение за счет двигателя"), процедура переходит к этапу S32. Если "Нет" ("предыдущее значение состояния двигателя ≠ во время приведения в движение за счет двигателя"), процедура переходит к этапу S34.
[0092] На этапе S32, AT-контроллер 7 определяет то, обнаружен или нет сигнал начала процесса остановки двигателя, после определения на этапе S31 того, что "предыдущее значение состояния двигателя = во время приведения в движение за счет двигателя". Если "Да" (обнаружение сигнала начала процесса остановки двигателя), процедура переходит к этапу S33. Если "Нет" (отсутствует обнаружение сигнала начала процесса остановки двигателя), процедура переходит к этапу S34.
[0093] На этапе S34, после определения на этапе S31 того, что "предыдущее значение состояния двигателя ≠ во время приведения в движение за счет двигателя", определения на этапе S32 того, что сигнал начала процесса остановки двигателя не обнаруживается, или задания на этапе S33 таймера обратного отсчета, предыдущее значение состояния двигателя обновляется, и процедура переходит к этапу S35.
Здесь следует отметить, что предыдущее значение состояния двигателя обновляется следующим образом: предыдущее значение состояния двигателя = текущее значение состояния двигателя.
Поскольку другие структуры являются идентичными структурам по фиг. 1-6 в первом варианте осуществления, их обозначение на чертежах и пояснение в данном документе опускаются.
[0094] Далее поясняется последовательность операций третьего предпочтительного варианта осуществления.
Последовательность операций в процессе задания флагов запрещения
Как описано выше, когда возникает переключение режима из HEV-режима в EV-режим, флаг запрещения задается равным 1 согласно конкретному условию, указывающему возникновение переключения режима. Ниже поясняется последовательность операций в процессе задания флагов запрещения в третьем предпочтительном варианте осуществления с использованием условия определения сигнала начала процесса остановки двигателя в качестве конкретного условия, представляющего переключение режима.
[0095] На основе переключения режима из HEV-режима в EV-режим, когда устанавливается такое условие, что "предыдущее значение состояния двигателя = приведение в движение за счет двигателя" и" определение сигнала начала процесса остановки двигателя", на блок-схеме последовательности операций способа на фиг. 10, формируется следующая последовательность операций: этап S31 → этап S32 → этап S33 → этап S34 → этап S35 → этап S36 → этап S37 → возврат.
На этапе S33, таймер обратного отсчета задается равным предварительно определенному значению ("значение таймера = предварительно определенное значение"). На этапе S36, после определения на этапе S35 того, что "значение таймера > 0", флаг запрещения задается равным 1, что представляет запрещение определения начала зацепления.
[0096] Затем до тех пор, пока значение таймера не укажет 0 от последующего периода управления, на блок-схеме последовательности операций способа по фиг. 10 повторяется последовательность операций в виде "этап S31 → этап S34 → этап S35 → этап S36 → этап S37 → возврат", и поддерживается флаг запрещения = 1. Кроме того, когда значение таймера = 0, на блок-схеме последовательности операций способа по фиг. 10, повторяется последовательность операций в виде "этап S31 → этап S34 → этап S35 → этап S38 → возврат". На этапе S38, после определения на этапе S35 того, что значение таймера = 0, флаг запрещения сбрасывается до 0 (флаг запрещения = 0).
[0097] В третьем предпочтительном варианте осуществления, до определения того, что второй тормоз B2 начал зацепление, и в случае если обнаруживается сигнал начала процесса остановки двигателя, флаг запрещения, запрещающий определение начала зацепления, задается равным 1 (флаг запрещения = 1).
Другими словами, когда режим переключается из HEV-режима в EV-режим, начинается процесс остановки двигателя Eng. Следовательно, когда обнаруживается сигнал начала процесса остановки двигателя, определение начала зацепления запрещается. Таким образом, может не допускаться ошибочное определение варьирования нагрузки электромотора/генератора MG, которое возникает вследствие изменения режима из HEV-режима в EV-режим, как начала зацепления.
Следует отметить, что поскольку остальная последовательность операций является идентичной первому предпочтительному варианту осуществления, ее пояснение опускается.
[0098] Далее поясняется преимущество. Устройство управления для автоматической трансмиссии AT в третьем предпочтительном варианте осуществления имеет следующее преимущество.
[0099] (5) Средство запрещения определения (этап S2 на фиг. 6, фиг. 10) запрещает (этап S36 на фиг. 10) определение средством определения начала зацепления до определения того, что фрикционный элемент зацепления (второй тормоз B2) начал зацепление, и в случае обнаружения того, что начался процесс остановки двигателя Eng.
Следовательно, помимо преимущества (1) или (2), когда обнаруживается то, что начался процесс остановки двигателя для двигателя Eng, определение начала зацепления запрещается. Таким образом, может не допускаться ошибочное определение варьирования нагрузки электромотора/генератора MG, которое возникает вследствие изменения режима из HEV-режима в EV-режим, как начала зацепления. Другими словами, когда возникает изменение режима из HEV-режима на EV-режим, начинается процесс остановки двигателя Eng. С учетом этого аспекта, определение начала зацепления согласно величине варьирования крутящего момента MG запрещается.
[0100] Как описано выше, устройство управления для автоматической трансмиссии согласно настоящему изобретению пояснено на основе первого, второго и третьего предпочтительных вариантов осуществления. Тем не менее, конкретная структура не ограничена этими предпочтительными вариантами осуществления. Конструктивные модификации и добавления разрешаются без отступления из сущности изобретения, связанной с соответствующей формулой изобретения.
[0101] В первом предпочтительном варианте осуществления, в качестве средства запрещения определения, проиллюстрировано определение задания флага запрещения на основе регулируемого гидравлического давления для первой муфты CL1. Тем не менее, в качестве средства запрещения определения, определяется фактическое гидравлическое давление первой муфты CL1, и задание флага запрещения может определяться на основе фактического гидравлического давления первой муфты CL1.
[0102] В третьем предпочтительном варианте осуществления, в качестве средства запрещения определения, флаг запрещения задается равным 1 (флаг запрещения = 1), когда обнаруживается сигнал начала процесса остановки двигателя. Тем не менее, в качестве средства запрещения определения, определение того, что процесс остановки двигателя для двигателя начинается, может быть основано на том, когда определяется то, что крутящий момент двигателя уменьшается.
[0103] В первом, втором и третьем предпочтительных вариантах осуществления, в качестве элемента зацепления, размещенного между двигателем и электромотором, проиллюстрирован нормально закрытый тип первой муфты CL1, которая расцепляется согласно повышению гидравлического давления. Тем не менее, в качестве элемента зацепления, размещенного между двигателем и электромотором, может использоваться нормально открытая первая муфта, которая расцепляется за счет сброса гидравлического давления.
[0104] В первом, втором и третьем предпочтительных вариантах осуществления настоящее изобретение является применимым к гибридному транспортному средству, в котором содержится масляный насос S-O/P с электроприводом, и показан пример, в котором масляный насос M-O/P с механическим приводом, который приводится в действие посредством входного вала автоматической трансмиссии, не приводится в действие во время EV-режима и остановки транспортного средства. Тем не менее, настоящее изобретение не ограничено этим. Например, в транспортном средстве, в котором не установлен масляный насос с электроприводом, и в котором число оборотов входного вала поддерживается равным постоянному числу оборотов посредством электромотора, приводящего в действие механический масляный насос даже в EV-режиме и при остановке транспортного средства, и настоящее изобретение является применимым к переходу из HEV-режима в EV-режим.
[0105] В первом, втором и третьем предпочтительных вариантах осуществления, в качестве таймера для флага запрещения, достаточная продолжительность обеспечивается в течение промежутка времени со времени, в которое начинается процесс остановки двигателя, до времени, в которое деактивируется флаг п полного сгорания (фаза (1) перехода HEV→EV). Тем не менее, в качестве таймера для флага запрещения, продолжительность таймера может задаваться равной такой продолжительности таймера, при которой определение хода и управление с распознаванием хода на основе величины варьирования крутящего момента MG запрещаются во время переключения режима из HEV-режима в EV-режим.
[0106] В первом, втором и третьем предпочтительных вариантах осуществления, устройство управления для автоматической трансмиссии согласно настоящему изобретению применяется к гибридному транспортному средству FR-типа с одним электромотором и двумя муфтами. Тем не менее, устройство управления для автоматической трансмиссии является применимым к гибридному транспортному средству FF с одним электромотором и двумя муфтами либо применимым к гибридному транспортному средству другого типа, отличного от типа с одним электромотором и двумя муфтами, например, к гибридному транспортному средству параллельного типа, имеющему механизм разделения потоков мощности. В общих словах, настоящее изобретение является применимым к транспортному средству с электроприводом, в котором автоматическая трансмиссия, в которую вводятся движущие силы из источников приведения в движение, включающих в себя двигатель и электромотор, содержится в цепи привода.
Реферат
Изобретение относится к области транспорта, а именно к системам и устройствам управления для автоматической трансмиссии. Устройство содержит: фрикционный элемент зацепления, средство определения начала зацепления, средство запрещения определения для запрещения определения средством определения начала зацепления. Средство определения начала зацепления для определения того, что фрикционный элемент зацепления начал зацепление. В случае если нагрузка электромотора увеличивается на предварительно определенную величину, во время управления числом оборотов, при котором число оборотов входного вала автоматической трансмиссии управляется до предварительно определенного целевого числа оборотов, и когда выбирается диапазон движения, и фрикционный элемент зацепления в состоянии расцепления зацепляется. Средство запрещения определения для запрещения определения средством определения начала зацепления до определения того, что фрикционный элемент зацепления начал зацепление. В случае если возникает переключение из HEV-режима, в котором движущие силы из двигателя и электромотора вводятся на входной вал, в EV-режим, в котором только движущая сила электромотора вводится на входной вал. Достигается безошибочное определение варьирования нагрузки электромотора, которое возникает вследствие переключения из HEV-режима в EV-режим. 4 з.п. ф-лы, 10 ил.
Комментарии