Изобретение относится к способу, с помощью которого можно определить оптимальное
значение точки переключения ступенчатой передачи в автомобилях. Этот
способ можно использовать в автоматических коробках передачи и в механических
коробках передач с автоматическим при во- дом.
Цель изобретения - повышение эффективности путем определения оптимальной
точки переключения передач при любой нагрузке . -
На фиг. 1 представлена блок-схема линии привода автобуса; на фиг. 2 - диаграмма
число оборотов - момент двигателя; на фиг. 3 -диаграмма положение педали акселератора
- момент двигателя; на фиг. 4 - блок-схема варианта электронного блока
управления; на фиг. 5- графическое изображение условий, зависящих от числа оборотов
и нагрузки; на фиг. 6 - график сравнений положений на диаграмме число оборотов -
момент двигателя и гидродинамического преобразователя момента; на фиг. 7-15 -
блок-схема устройств, характеризующих варианты способа.
Предлагаемый способ может быть осуществлен в нескольких вариантах и может
быть использован как в автоматических коробках передач, так и в автоматизированных
механических синхронизированных коробках передач. Для реализации изобретения
создан электронный блок, работа которого осуществляется по закладываемой в
него программе в зависимости от соответствующего варианта способа и с соответствующей
коробкой передач. Далее рассматривается основной вариант, а при описании
других вариантов описываются только различия . Для более четкого понимания сначала
описываются более простые, а затем более сложные операции способа, и каждая
операция на отдельной блок-схеме. По этим соображениям блок-схемы изображены так,
чтобы их построения хорошо воспринималось и визуально.
Реализованный на практике вариант способа использован в городском автобусе,
приводимом двигателем 1, как видно на фиг.
1. Он представляет собой шестицилиндровый
дизель мощностью 140 кВт, диаграмма положение педали акселератора - момент
(М f( (/))} которого изображена на фиг. 2, а диаграмма число оборотов - момент (М f(n) на фиг. 3.
Число оборотов холостого хода составляет пд 500/550 об/мин, минимальное рабочее
число оборотов пиимин 880 об/мин, максимальное пиимзкс 1800 об/мин, максимальное
число оборотов пмакс 2200 об/мин.
Двигатель 1 приводит коробку передач
2 (фиг, 1). Она представляет собой автоматическую коробку передач с планетарной передачей
и четырьмя ступенями (четыре прямых скорости и одна обратная) Передаточное
отношение этих передач следующее: 3,43; 2,01; 1,42; 1,00. Входной вал коробки
соединен гидродинамическим преобразователем 3 момента и короткоззмыкающей
его фрикционной муфтой А с коленвалом двигателя 1. Переключение ступеней и расцепление-сцепление
фрикционной муфты укрепляется с помощью электромагнитного клапана. Теоретическое среднее значение
скорости ступеней составляет: при переключении с низшей на 2 скоростью 18 км/ч,
на 3 скорость - 25 км/ч, на 4 скорость - 40 км/ч, при переключении с высшей на 3 скорость
85 км/ч, на 2-22 км/ч, на 1-3 км/ч. Конечная скорость автобуса составляет 80 км/ч.
Выходной пал коробки 2 соединен карданным валом 5 с дифференциалом 6 заднего
моста, а дифференциал 6 соединен полуосями 7 с колесами 8. Перечисленные
агрегаты образуют известную линию привода автобуса.
Предлагаемый способ применим также в легковых автомобилях. Как известно, коробка
передач и дифференциал в легковых автомобилях с передним приводом и двигателем
задней установки в общем случае образует -блок, в котором отсутствует карданный вал.
Один из существенных видов информации с точки зрения выбора скорости состоит
в том, каким образом водитель приходит к решению переключить скорость. Для этого
служит переключатель 9 выбора ступеней, т.е. контроллер, выполненный в виде рукоятки
или кнопки. С помощью контроллера можно выдавать команды на следующие положения
переключения: коробка передач находится в холостом, или нейтральном положении
N включает не выше 1 передачи, включает не выше 2 передачи, включает не
выше 3 передачи, включает на прямую передачу D т.е. на 4 передачу, включает задний
ход R, включает в положение Р стояночного тормоза. Выходы I, II, III, D, R, P переключателя
9 подключены к соответствующим входам электронного блока управления.
Электронный блок 10 управления служит для управления электромагнитным клапаном
11, причем информация, необходимая для управления, выдается датчиками сигналов .
В действительности в предлагаемом способе не обязательно, чтобы водитель мог
запрещать в контроллером переключение одной или нескольких ступеней. Правильное
определение условий переключения на более высокую передачу исключает наличие
таких неправильных положений при переключении на более низкую передачу, которые
могут быть устранены только внешними воздействиями (I, II, и III положениями контроллера
). Таким образом, эти положения могут и не понадобиться. Однако эти положения запрета следует сохранить по единственной причине1 в случае определенных
нарушений работы управления автоматической коробки передач автомобиль при наличип
этих позиций запрета остается все же управляемым от ручного управления настолько
, что его можно доставить к месту ремонта.
Другую информацию поставляет датчик
0 12 сигнала о положении педали акселератора , встроенный в эту педаль 13, регулирующую
топливоподающую систему двигателя 1, Полный угол хода этой педали 13 составляет
23° и по всем этом дипазоне от 0 до 23°
5 датчик 12 выдает электрический сигнал,
пропорциональный угловому положению педали. Датчик 14 тоже подключен к входу
электронного блока ГО управления. Наконец , нужную информацию и для управления
0 представляет и числб оборотов двигателя 1. Сигнал числа оборотов nm, выражающий
число оборотов коленвала двигателя 1 и пригодный для управления, вырабатывается
датчиком 14 сигнала о числе оборотов,
5 установленным на распределительном валу
двигателя 1 и подключенным к входу электронного блока 10 управления. Передача 1:2
распределительного вала и коленвала учитывается непосредственно после входа в
0 электронном блоке 10. Электронный блок 10, может быть выполнен в бесчисленном множестве
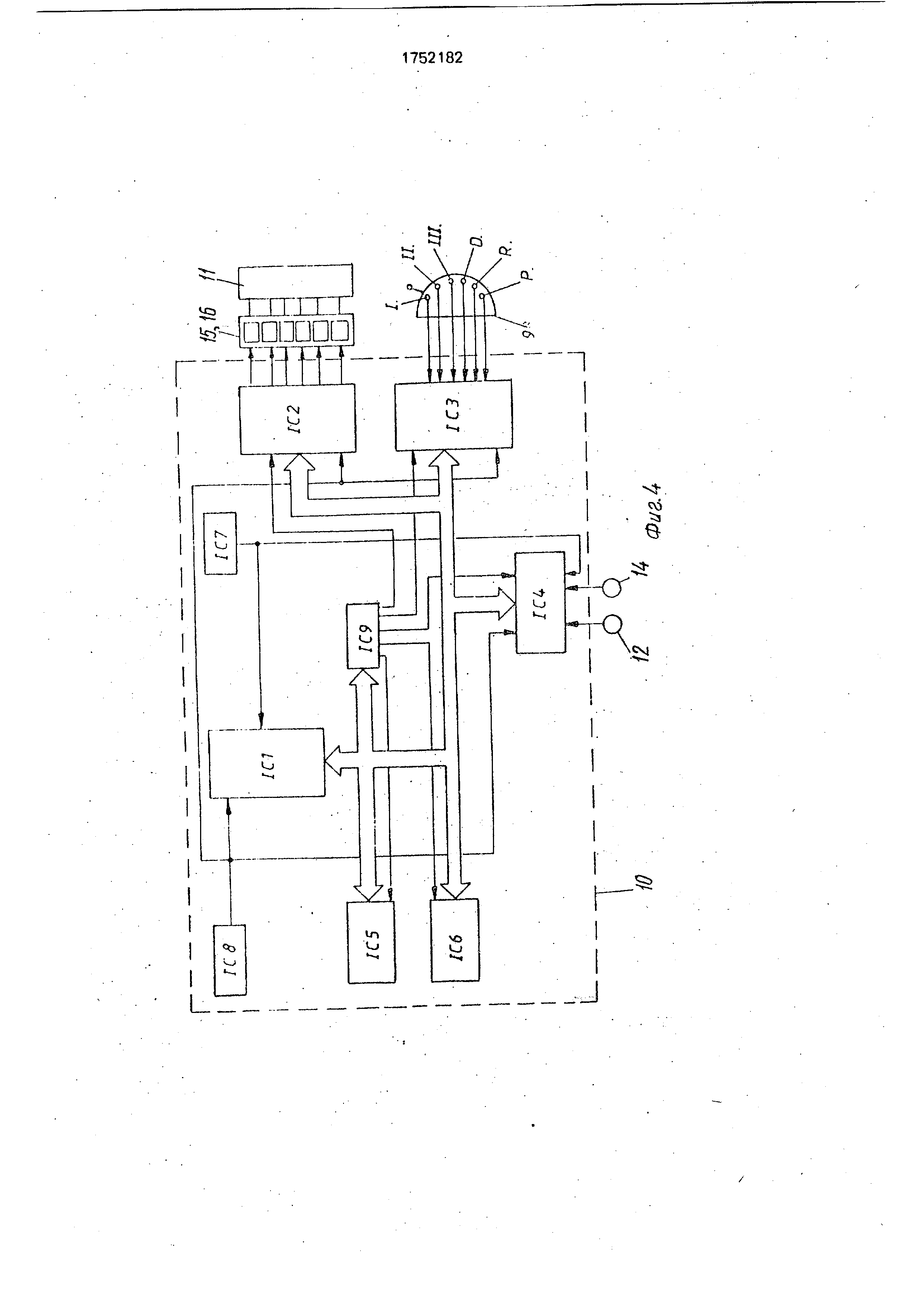
вариантов. Один из возможных вариантов приведен на фиг. 4. Электронные
элементы имеют известные типовые обоз5 начения в соответствии с каталогами интегральных схем,
Электронный блок 10 (фиг. 4) состоит из микропроцессора Z 80 A IC1, программируемого
блока ввода-вывода Р10 8255 IC2 и
0 IC3, программируемого трехканального
счетнохронирующего блока IC4 (8252), запоминающего устройства с произвольной выборкой
(ЗУПВ) С5 (4016), ПЗУ постоянного запоминающего устройства (ICG), (2732), ге5
нератора тактовых импульсов IC7 (7434), блока сброса IC8 (74 LS132) и дешифратора IC9(74LC 138).
Адресные входы, входы данных и управляющие входы одинакового назначения в
0 микропроцессоре IC1, программируемом блоке ввода-вывода IC2 п IC3, программируемом
трехканальном счетно-хранирующем блоке IC4, ЗУПВ 1С5, ПЗУ IC6 и дешифраторе 09 соединены между собой.
5 Блок 108 сброса соединен с точкой сброса микропроцессора 1С1, блоками IC2,
IC3 и IC4. Выходы дешифратора IC9 соединены каждый с соответствующим входом
блоков IC2, IC3. IC4, IC5 и IC6. Генератор тактовых импульсов IC7 соединен с тактовым входом микропроцессора IC1 и IC4.
Электронный блок 10 управления соединен
с элементами, участвующими в управлении , следующим образом.
Сигналы, поступающие с выходов переключателя 9, принимаются на входах программируемого
блока ввода-вывода IC3, сигнал с датчика 12 сигнала о положении педали акселератора и сигнал с датчика 14
числа оборотов поступают на входы программируемого трехканального счетно-хро- нирующего блока IC4,
Сигнал управления электронного блока 10 появляется на выходах программируемого
блока ввода-вывода IC2. Эти выходы подключены посредством усилителей 15 и 16
мощности к электрическому входу электромагнитного клапана 11. Усилители мощности
15 и 16 не входят в электронный блок 10,
На схеме фиг, 4 нельзя точно определить
те блоки на которые в дальнейшем делается ссылка при описании вариантов
способов и относящихся к ним блок-схем. Это объясняется тем, что электронные блоки
с элементами, соответствующими производимым операциям, можно построить и
более простым образом. Очевидно, например , что один блок памяти с большой емкостью
способен накапливать ту информацию, для которой на блок-схеме имеются отдельные блоки памяти,
В соответствии со схемой на фиг, 7 предлагаемый способ выполняется следующим
образом.
В блок 17 памяти вводится диаграмма
M(ip, показанная на фиг. 2 и выражающая зависимость между положением педали акселератора
и моментом, а в блок памяти - диаграмма (п) по фиг. 3, выражающая зависимость
между числом оборотов и моментом .
В общем случае переключение ступени
происходит так. Когда водитель хочет начать движение, он переключает переключатель
9, который находился до этого в холостом положении N, в положение I. Если
соблюдены условия полной безопасности движения автобуса, водитель прибавляет
число оборотов двигателя 1 посредством нажатия на педаль акселератора 13 и блок 19,
управляющий переключением ступеней, выдает на электромагнитный клапан 11 через
усилитель 20 мощности команду и включе- ние 1 передачи, Таким образом, автобус начинает
движение на 1 передаче.
С этого момента датчик 12 положения
педали акселератора постоянно выдает сигнал дросселирования на блок 12 памяти, а
датчик 14 числа оборотов постоянно выдает
сигнал числа оборотов на блок 18 памяти.
Блок 17 памяти выбирает из введенной в него диаграммы М( р) теоретические мгновенные
значения, относящиеся к положению педали акселерометра. Аналогичным
образом блок 18 памяти выбирает из введенной в него диаграммы М(п) мгновенные
значения, относящиеся к числу оборотов. Из сравнения этих двух мгновенных значений
можно заключить о нагрузке двигателя 1. Это выполняется блоком 21. генерирующим
сигнал нагрузки, поскольку в него поступает как сигнал блока 17 памяти, так и сигнал с
блока 18 памяти, Здесь по формуле
.
Q SMQ)dy)-SM(n)dn . 1ППО, ЬSM(p)dpUO/
вырабатывается в процентах сигнал S нагрузки .Этот сигнал нагрузки S изменяется
при изменении положения педали акселерометра и чиста оборотов практически постоянно .,
Сигнал нагрузки S подается из блока 20.
вырабатывающего этот сигнал, в блок 21
оценки нагрузки. Таким образом, подается сигнал датчика 14 числа оборотов в блок 22
оценки числа оборотов Оценка сигнала нагрузки S и сигнала nm числа оборотов видна
из фиг. 5. Опытным путем определены те значения нагрузки и числа оборотов, при
одновременном появлении которых можно, не уменьшая скорости автобуса, производить
переключение на более высокую передачу , Аналогично определены значения
нагрузки и числа оборотов, при достижении которых можно переключаться на более
низкую передачу, поскольку в ином случае движение автобуса необоснованно замедлится
, или двигатель заглохнет.
Из фиг. 5 видно, что коробка передачи
должна переключаться на ближайшую более высокую передачу, если величина нагрузки
понижается ниже постоянной
величины сравнения-повышения ступени-
нагрузки sf, где sf 25%, и если число оборотов двигателя превысило постоянную
величину nf сравнения-повышения ступени- числа оборотов, где nf 1200 об/мин. Из
фиг 5 видно, что переключение на более высокую ступень передачи можно осуществить в диапазоне F.
Условия переключения на более низкую передачу состоят в том, что или повышается
величина нагрузки выше постоянной величины sv сравнения-понижения ступени-нагрузки
, где sv 50%, или понижается число оборотов двигателя ниже постоянной величины
nv сравнения-понижения ступени, где
nv 870 об/мин. Эти условия обозначены на фиг 5 - область понижения ступени v.
Таким образом, блок 21 оце нки нагрузки контролирует, где находится фактически
сигнал нагрузки S в диапазоне нагрузок от 0 до теоретически 100%, и если
сигнал, выражающий величину sf срав- нения-повышения ступени-нагрузки,
уменьшается, то вырабатывается сигнал, выражающий необходимость переключения
на более высокую передачу, А если сигнал нагрузки превышает сигнал, выражающий
величину sv сравнения-повышения ступени-нагрузки, то вырабатывается
сигнал, выражающий необходимость переключения на более низкую передачу, который
и передается в блок 19, управляющий переключением передач.
Аналогично происходит оценка сигнала nm числа оборотов в блоке 22, оценивающем
число оборотов, который контролирует, где находится число оборотов в диапазоне
от 0 до 2200 об/мин. Если фактическое число оборотов находится выше величины nf
сравнония-повышения ступени-числа оборотов , вырабатывается сигнал, выражаю
щий необходимость переключения на более высокую передачу, а если фактическое число
оборотов находится ниже величины сравнения-понижения ступени-числа оборотов,
то вырабатывается сигнал, выражающий необходимость переключения на более низкую
передачу, который и передается в блок
20управления переключением передач.
Если величина нагрузки S и фактическое число оборотов попали в диапазон F,
обозначенный на фиг. 5, блок 18, управляющий переключением передач, выдает через
усилитель 15 на электромагнитный клапан
21команду на отключение 1 передачи и на
включение 2 передачи
Во время этого переключения передач
фрикционная муфта 3 по причинам, которые будут описаны, находится в большинстве
случаев во включенном положении. Поэтому и здесь возникает проблема упомянутой
асинхронности. Гидравлика обуславливает задержку срабатывания, а это приводит к
необходимости иметь в электронном блоке элемент, обеспечивающий задержку 50 мс.
Таким образом и здесь имеет место переключение с перекрытием
Блок 19 управления переключением передач выдает аналогично тому, как было
описано, команду на включение 3 и А передач , если величина нагрузки S и фактическое
число оборотов в соответствии с желанием водителя начать ускорение снова
попадают в диапазон F переключения на более высокую передачу (фиг. 5).
блок 19 управления переключением передач нуждается в наличии встроенной
памяти, в которую вводится сигнал идентификации включаемой ступени. Этим
обеспечивается то, что блок управления переключением передач наряду с оценкой
необходимости переключения на повышенную или на пониженную ступень может также
принять решение, какую передачу
0 необходимо включить. К тому же блок 19
должен обладать способностью решать, ка- кая передача соответствует фактической
скорости автомобиля при необходимости переключить коробку 2 передач во время
5 движения на холостой ход, а затем при продолжении движения снова включить на какую-либо ступень.
Хотя знание фактической скорости автомобиля не обязательно необходимо для
0 предлагаемого управления, эта задача блоком 19 совершенно не выполняется и поэтому
коробка 2 передач снабжена датчиком числа оборотов, который будет описан более
подробно при рассмотрении другого ва5 ризнтач
Для выполнения переключения передач необходимо обратить внимание на сцепление
и расцепление фрикционной муфты А В целях определения используемых при этом
0 условий необходимо предварительное; пояснение
Как известно, способность к передаче
момента гидродинамического преобразователя момента 3 отличается от момента,
5 создаваемого на коленчатом валу двигателя 1. Эти два момента равны примерно при
1000 об/мин, при меньшем числе оборотов способность гидродинамического преобразователя
к передаче момента ниже, а
0 при более высоком числе оЪоротов - выше,
диаграммы моментов (п) примененного в нашем случае гидродинамического преобразователя
момента не снимались, так что на фиг 6 изображено только соотношение
5 диаграммы моментов двигателя 1 и гидродинамического преобразователя 3. Диаграмма
двигателя 1 имеет обозначение Mmot а диаграмма гидродинамического преобразователя
- Mnct Таким образом если в диа0 пазоне менее 1000 об/мин фрикционное
сцепление 3 не короткозамкнуто, гидродинамический преобразователь момента 4
имеет проскальзывание, то двигатель 1 автобуса мохет продолжать работать на той
5 же передаче. Очевидно, что при более высоком числе оборотов небольшое проскальзывание
, создаваемое на гидродинамическом преобразователе, представляет излишние
потере, поэтому целесообразно замкнуть фрикционное сцепление 3.
Условия работы фрикционного сцепления 3 определяются, если смотреть на фиг. 5, следующим образом.
Фрикционная муфта 4 замыкается, если число оборотов превысит постоянную величину
пг сравнения-короткого замыкания-числа оборотов, где пг 1100 об/мин, и значение
нагрузки уменьшается ниже постоянной величины згсравнения-короткрого замыкания-нагрузки
, где , и размыкается, есличисло оборотов уменьшается ниже постоянной величины
, сравнения-размыкания числа оборотов, где по 900 об/мин.
Видно, что значения числа оборотов не попадают в значение 1000 об/мин, соответствующее
точкам пересечения кривых моментов , поскольку таким образом срабатывание
фрикционного сцепления более определенно.
Для осуществления описанного, т.е. для
управления расцеплением-сцеплением фрикционной муфты 4 сигнал нагрузки, вырабатываемый
блоком 20, подается в блок 23 оценки нагрузки, а сигнал числа оборотов
nm с датчика 14 - в блок 24 оценки числа оборотов, где сравнивается с величиной sr
сравнения короткого замыкания - нагрузки или с величиной пг сравнения - короткого
замыкания - числа оборотов и величиной дпо сравнения-расцепления - числа оборотов
. Если величина s нагрузки понижается ниже величины sr сравнения - короткого
замыкания - нагрузки, а число оборотов поднимается выше величины пг сравнения
- короткого замыкания - числа оборотов, блок 23 оценки нагрузки и блок 24 оценки
числа оборотов выдают на блок 25 управления замыканием фрикционного сцепления
сигнал, выражающий необходимость этого короткого замыкания, а блок 25 управления
замыканием фрикционного сцепления выдает через усилитель 16 команду на короткое
замыкание того электромагнитного клапана 11, который управляет фрикционным
сцеплением 4. Сцепление 3 замыкается , т.е. между коленвалом двигателя 1 и
входным валом коробки 12 передач осуществляется механическое соединение.
На фиг. 5 видно, что величина згсравне- ния короткого замыкания нагрузки является
более жесткой, чем величина sf сравнения - повышения ступени-нагрузки, в то время,
как величина пг сравнения - короткого замыкания - числа оборотов мягче величины
nf сравнения - повышения ступени - числа оборотов. Т.е. пока нагрузка двигателя 1
интенсивна, т.е. необходимо гидродинамический преобразователь 8 момента, если,
например, водитель хочет повысить скорость автомобиля, то прежде произойдет повышение
ступени, а если нагрузка более
благоприятна, то сначала произойдет короткое
замыкание фрикционного сцепления.
Для понижения ступени коробки передач
могут существовать три причины: когда
водитель замедляет движение или резко ускоряется
(при обгоне), или автобус идет на подъем.
Простейший случай - когда водитель замедляет движение. Здесь он отпускает пе0
даль акселератора в исходное положение, после чего число оборотов двигателя 1 падает
. Когда число оборотов уменьшается ниже величины по сравнения-расцепления числа
оборотов, блок 24 оценки числа оборотов
5 выдает на блок 25 управления замыканием
сцепления сигнал, выражающий необходимость расцепления фрикционной муфты 4, а
блок 25 управления замыканием сцепления выдает команду на расцепление тому элек0
тромагнитному клапану, который управляет фрикционной муфтой, через усилитель 16.
Сцепление размыкается и после этого передача момента происходит через гидродинамический
преобразователь 3 момента.
5Если число оборотов двигателя 1 продолжает
уменьшаться и понижаться ниже величины nv сравнения-понижения ступени-числа
оборотов, блок 22 оценки числа оборотов вырабатывает сигнал, выража0
ющий необходимость понижения передачи , после чего усилитель 15 выдает
электромагнитному клапану 11 команду на включение 4 передачи и на включение 3 передачи.
5 Если водитель продолжает снижение скорости, блок 19 управления переключением
переда выдает при уменьшении числа оборотов двигателя 1 аналогичную команду
на дальнейшее понижение ступеней.
0При активном ускорении и при движении
на подъем положение иное. Здесь может возникнуть состояние ненадежного
переключения, которое до сих пор просто устранялось с помощью предпринимаемого
5 за один или два шага определенного ужесточения условий переключения на повышенную
ступень. В предлагаемом способе условия повышения ступени посредством
контроля состояния нагрузки перед пони0 жением ступени ужесточаются только в необходимом
масштабе плавно,
Для осуществления способа необходимо
сначала определить вид и меру такого ужесточения. Для этого опытным путем ус5
тановили,что величина sfсравнения - повышения ступени - нагрузки должна быть
ужесточена максимум до 6%, т е. скорректированная величина sfK сравнения-повышения
ступени-нагрузки должна находиться в пределах между 25 и 6%.
Мера ужесточения должна выбираться в зависимости от степени нагрузки перед понижением
ступени. Поскольку сигнал числа оборотов представляет собой одну из исходных
информационных величин значения нагрузки , достаточно проконтролировать, насколько
высоко было число оборотов двигателя 1 в момент понижения ступени, или где одно находилось
в диапазоне рабочих чисел оборотов . В использованном в данном случае
двигателе этот диапазгн составляет 880-1800 об/мин. В первом приближении между нахождением
числа оборотов в рабочем диапазоне перед понижением ступени и ужесточением условия повышения ступени
допускается линейная зависимость. Экспери- МРНТ показан, что корректировку вводить не
требуется. Однако целесообразно установить точную связь опытным путем.
В случае линейной зависимости корректировку выполняют с помощью следующих формул:
у - nzur u ck
Пимин
Пймакс Пцмин
где К - коэффициент корректировки;
Dzurtfck - число оборотов перед понижением
ступени;
пЦмин- минимальное рабочее числообо- ротов (800 об/мин);
Пимакс - максимальное рабочее число оборотов (1800 об/мин).
SK К (sf-ЗТмин),
где sK - поправочная величина;
К- упомянутый коэффициент корректировки;
sf - нормальная величина сравнения-
повышения ступени- нагрузки (25%);
sfwHH самая жесткая величина сравнения-повышения
ступени-нагрузки (6%).
Наконец
sfK sf-sK,
srK sr-sK,
где sfK - скорректированная величина сравнения-повышения
ступени-нагрузки;
srK - скорректированная величина
сравнения-короткого замыкания-нагрузки.
Число оборотов, выдаваемое датчиком
14, постоянно запоминается блоком 26 памяти . Если водитель начинает обгон, он
сильно нажимает на педаль 13 акселератора . Изменению положения педали соответствует
из функции М((р) более высокое значение, поэтому сигнал s нагрузки, вырабатываемый
блоком 20, повышается и при достижении им величины sv блок 19 управления
переключением ступеней выдаетопи- санным образом на электромагнитный
клапан 11 команду переключения на одну ступень вниз.
Одновременно с этим блок 19 управления переключением ступеней выдает на
блок 26 команду на запоминание только что поступившего сигнала числа оборотов. По
этому сигналу в блоке 27, вырабатывающем сигнал сравнения-нагрузки, генерируется
поправочная величина sK в соответствии с
приведенными формулами и подается в
блок 18 оценки нагрузки и далее в блок 23 оценки нагрузки.
С этого момента блок 21 оценки нагрузки сравнивает сигнал, поступающий
из блока 20, вырабатывающего сигнал нагрузки , с тем сигналом, который выражает
скорректированное на поправочную величину зК значение sfK сравнения-повышения
ступени-нагрузки и указывает блоку 19
управления переключением ступеней необходимость
повышения передачи на одну ступень только в случае выполнения этого строгого условия.
Аналогично этому блок 23 оценки нагрузки указывает блоку 25 управления замыканием
сцепления необходимость такого замыкания только в том случае, если сигнал
нагрузки меньше скорректированного на поправочную величину sK значения srK
срзвнения-короткого замыкания-нагрузки. При окончании обгона или ускорения
число оборотов двигателя 1 опережает положение педали газа, сигнал нагрузки s
уменьшается и, если он падает ниже скорректированной величины sfK, блок 21 оценки
нагрузки указывает блоку управления переключением ступеней необходимость
повышения передачи на одну ступень.
Блок 19, управляющий переключением
ступеней, гасит своей командой поправочную величину sK, и исходные условия ступени
передачи и короткого замыкания фрикционного сцепления возвращаются.
Когда автобус идет на подъем, происходит , в основном, тот же процесс. Здесь сигнал
нагрузки s изменяется не из-за того, что падает число оборотов двигателя 1, блок 22
памяти выбирает из диаграммы М(п) более низкий момент и сигнал нагрузки s повышается
наряду с неизменным положением педали акселератора и, если достигается
величина sv сравнения-понижения ступени-нагрузки , блок 21 оценки нагрузки указывает
блоку 19 управления переключением
ступеней необходимость понижения ступени
, а блок управления переключением ступеней выдает команду переключиться на
более низкую ступень. Одновременно с этим начинается описанный процесс.
Изменение условия переключения ступеней , конечно, возможно не только с изменением
величины sfсравнения-повышения ступени-нагрузки, но и с изменением величины nf сравнения-повышения ступени-
числа оборотов. Это может осуществляться следующим образом.
Коэффициент корректировки тот же, как прежде, благодаря чему
nK K(nfMaKc-nf),
где пК - поправочная величина;
гамаке - наиболее жесткая величина
сравнения-повышения ступени-числа оборотов (1700 об/мин);
nf - нормальная величина сравнения- повышения ступени-числа оборотов (1000 об/мин).
Наконец
nfK nf + nK; nrK пг н пК,
где nfK- скорректированная величина сравнения-повышения ступени-числа оборотов;
nrK - скорректированная величина сравнения-короткого замыкания-числа оборотов.
Этот вариант способа поясняется схемой на фиг. 10. Здесь видно, что по команде
блока 19, управляющего переключением ступеней, с использованием сигнала числа
оборотов, введенного в блок 26 памяти, определяется блоком 27 генерирования сигнала
сравнения -числа оборотов поправочная величина пК, передаваемая дальше в блок
22 оценки числа оборотов и в блок 24 оценки числа оборотов. С этого момента способ
протекает аналогично описанному.
При ужесточении условий повышения
ступени подразумевалось, что устранение ситуаций ненадежного повышения ступени
тем вероятнее, чем сильней это ужесточение . Однако может случиться, что оно окажется
избыточным и невыполнимым. Здесь может помочь сам водитель. Сбросив на короткое
время подачу топлива, он устанавливает режим, при котором сигнал нагрузки s
надежно падает ниже 6 %. Систему можно также снабдить такой вспомогательной программой
, чтобы число оборотов двигателя 1, повышаясь выше 2050 об/мин, автоматически
снимало ужесточение условий повышения ступени.
Можно осуществить более простые варианты предлагаемого способа. Блок-схема
на фиг. 11 представляет один из простейших вариантов. Здесь переключение ступеней
происходит в нормальных условиях так же, как и в описанных вариантах. Блок 12
памяти выбирает из диаграммы М(р значение момента, относящееся к сигналу подачи
топлива сдатчика 11 положения педали акселерометра , а блок 16 памяти выбирает из
диаграммы М(п) значение момента, относящееся к сигналу числа оборотов датчика 14
числа оборотов. Блок 21 генерирования сигнала нагрузки вырабатывает из этих значений
моментов сигнал нагрузки s, причем этот сигнал посредством блока 21 оценки
нагрузки, так ж е, как и сигнал числа оборо0 тов посредством блока 22 оценки числа оборотов
, контролируются с точки зрения условия переключения ступени и блок 19
управления переключением ступени выдает сигнал о необходимости повышения или по5
ниженйя ступени, после чего блок 19 управления переключением ступени передает
соответствующую команду на электромагнитный клапан 17.
Упрощение по сравнению с описанны0 ми вариантами осуществления способа состоит
в характере ужесточения условий повышения ступени. В блоке 22 оценки числа
оборотов помимо нормальной величины nf сравнения-повышения ступени-числа
5 оборотов программируется также ужесточенная величина nfs сравнения-повышения
ступени-числа оборотов. Аналогично этому в блоке 24 оценки числа оборотов помимо
нормальном величины пг сравнения-корот0 кого замыкания-числа оборотов запоминается
также ужесточенная величина nrs сравнения-короткого замыкания-числа оборотов.
Если блок 19 управления переключени5 ем ступени передает через усилитель 15 на
электромагнитные клапаны 17 кома, ду нз переключение на пониженную скорость, он
указывает блоку 22 оценки числа оборотов, что в дальнейшем необходимо проконтро0
лировать сигнал числа оборотов с датчика 14 по сравнению с ужесточенной величиной
nfs сравнения-повышения ступени-числа оборотов. Аналогично блок 24 оценки числа
оборотов получает команду с блока 19 уп5 равления переключением ступени, чтобы в
дальнейшем существовало условие замыкания фрикционного сцепления 4-ужесточенная
величина nrs сравнения-короткого замыкания-числа оборотов.
0 Эта ужесточающая команда блока 19уп- равления переключением ступени отменяется
следующим сигналом на повышение ступени.
Ужесточенная величина nfs сравне5
ния-повышения ступени-числа оборотов и ужесточенная величина nrs сравнения-
короткого замыкания-числа оборотов могут быть равны ранее описанной наиболее
жесткой величине nfMaxc сравнения-повышения ступени-числа оборотов или наиболее жесткой величине пгмакс сравнения -короткого замыкания-числа оборотов
На блок-схеме (фиг. 12) видно, что можно осуществить такой же простой вариант
способа, если, исходя из условий переклю- чения ступени, контролировать не число
оборотов, а значение нагрузки.
В блок 21 оценки нагрузки подается также
ужесточенная величина sfs сравнения- повышения ступени-нагрузки, а в блок 22
оценки нагрузки-также ужесточенная величина сравнения-короткого замыкания-нагрузки
Они тоже могут быть равны определенной ранее ужесточенной величине srs сравнения-повышения ступени-на-
грузки или ужесточенной величине sfnMH сравнения-короткого замыкания-нагрузки.
Для использования этих ужесточенных условий аналогично формируется команда
на понижение ступени блоком 19.
Эти два упрощенных варианта способа
в определенной степени аналогичны примененным ранее решениям. Но они лучше, поскольку
основные условия переключения ступеней анализируются для поиска опти-
мальных показателей нагрузки, при которых производится переключение.
Блок-схема более сложного варианта осуществления способа показана на фиг.
18. В обычных ситуациях при движении дело происходит в соответствии с описанным
процессом. Блок 17 питания производит поиск соответствующих значений момента по
сигналу датчика 12 положения педали акселератора из диаграммы М(Ј), блок 18 памяти
производит поиск соответствующих значений момента по сигналу датчика 14 числа
оборотов из диаграммы М(п),а блок 21 вырабатывает сигнал нагрузки s по найденным
значениям моментов, который с помощью блока 21 оценки нагрузки сравнивается с
величиной sf сравнения-повышения ступени-нагрузки и с величиной sv сравнения-
понижения ступени-нагрузки. Блок 22 оценки числа оборотов сравнивает сигнал
числа оборотов с сигналом, выражающим величину nf сравнения-повышения ступени-числа
оборотов и величину nv сравнения-понижения ступени-числа оборотов.
По результатам сравнения блок 21 оценки нагрузки и блок 22 оценки числа оборотов
вырабатывают соответствующий сигнал, на основе которого блок 19 управления переключением
ступеней выдает команду электромагнитному клапану 17 через усилитель
15 на включение соответствующей ступени.
Аналогично блок 23 оценки нагрузки и
блок 24 оценки числа оборотов выдают сигнал блоку 25 управления замыканием сцепления
. На основе этого сигнала блок 25
выдает через усилитель 1 б команду на замыкание
или размыкание сцепления.
Перед пояснением модификации переключения
ступеней целесообразно рассмотреть , по каким причинам, из-за какого
изменения характеристик рабочего состояния происходит переключение на более низкую ступень.
Переключение на более низкую ступень может происходить в трех ситуациях, а
именно: при обычном снижении скорости, при обгоне и движении на подъем,
При обычном замедлении уменьшаются как сигнал с акселерометра, так и число оборотов
двигателя 1, однако здесь уменьшение сигнала акселерометра интенсивнее
(может дать упасть до нуля), поэтому уменьшается и сигнал нагрузки s. Понижение ступени
произойдет также, если число оборотов упадет ниже величины nv сравнения-понижения
ступени. Проконтролировав изменение характеристик, можно увидеть, что, образовав по изменению числа
оборотов сигнал vr изменения числа оборотов , по изменению нагрузки сигнал vs изменения
нагрузки и приняв уменьшение характеристик отрицательным изменением,
при обычном замедлении получаем отрицательный сигнал vn изменения числа оборотов
и сигнал vs изменения нагрузки.
При обгоне увеличиваются как сигнал
акселератора, так и число оборотов, но поскольку число оборотов может повышаться
медленее, сигнал нагрузки s увеличивается. Понижение ступени последует в результате
увеличения сигнала нагрузки s при повышенном числе оборотов. Как сигнал vn изменения
числа оборотов, так и сигнал vs изменения нагрузки будут положительными .
При движении на подаем сигнал акселератора не изменяется или увеличивается,
число оборотов падает, поэтому сигнал нагрузки снова возрастает. Понижение ступени
произойдет и здесь вследствие увеличения сигнала нагрузки s. Сигнал vn
изменения числа оборотов станет отрицательным , а сигнал vs изменения нагрузки - положительным.
Состояние характеристик перед понижением ступени приведено в следующей
таблица.
Видно, что имеются характеристики, которые
при анализе в паре однозначно указывают необходимость понижения ступени,
Есла аналогично применявшимся решениям удовлетвориться ужесточением условий
повышения ступени на одну-две, можно выбрать правильное ужесточение на основе
анализа изменения известных характеристик или безо всякой дополнительной информации
.
Этот вариант способа осуществляется следующим образом.
Сигнал s, вырабатываемый блоком 21, подается в блок 28 оценки изменения нагрузки
, где по этому изменению в единицу времени вырабатывается сигнал vs изменения
нагрузки. Он подается в блок 29, вырабатывающий сигнал сравнения-нагрузки.
Сигнал числа оборотов с датчика 14 подается в блок 30 оценки изменения числа
оборотов и по его изменению в единицу времени вырабатывается сигнал vn изменения
числа оборотов. Этот сигнал подается в блок 29, вырабатывающий сигнал сравнения-нагрузки .
В блоке 29 с помощью команды с блока 19 управления переключением ступени на
включение более низкой ступени контролируется , какой знак имели в момент такого
понижения ступени сигнал vn изменения числа оборотов и сигнал vs изменения нагрузки
. Если и тот и другой сигнал были отрицательными, то понижению ступени
предшествовало движение с равномерной скоростью или обычное замедление. В этом
случае блок 29, вырабатывающий сигнал сравнения-нагрузки, оставляет услбвия повышения
ступени неизменными, т.е. в блок 21 оценки нагрузки подается поправочная
величина, равная нулю. Если и тот и другой сигнал были положительными, то понижению
ступени предшествовало энергичное ускорение, В этом случае блок 29, вырабатывающий
сигнал сравнения-нагрузки, ужесточает величину сравнения-повышения
ступени-нагрузки на небольшую поправочную величину и в блоке 21 оценки
нагрузки вырабатывается сигнал, выражающий постоянную величину обгона - сравнения
нагрузки, Наконец, если сигнал vn изменения числа оборотов был отрицательным
, а сигнал vs изменения нагрузки - положительным , то понижение ступени вызвано
движением на подъем. На этом основании блок29, вырабатывающий сигнал сравнения-
нагрузки, ужесточает команду сравнения-по- вышения ступени-нагрузки на более
значительную поправочную величину и в блоке 21 оценки нагрузки вырабатывается сигнал
, выражающий постоянную величину движения на подъем-сравненил-нагрузки.
Для осуществления способа условия по- сышения ступени или их ужесточения определяются
в автобусе с приведенными параметрами опытным путем следующим образом.
Нормальная величина сравнения-повышения ступени-нагрузки составляет
25%, величина обгонэ-сравнения-нагрузки 18 %, величина движения на подъем-сравнения-нагрузки
б %. Эти величины, в основном , равны значениям, определенным в
описанных вариантах выполнения способа. Эти варианты могут осуществляться и без
контроля изменения нагрузки. В этом случае нужно определить, какую величину имел
сигнал числа оборотов датчика 14 при пере0 ключении на более низкую ступень. Если
сигнал числа оборотов был ниже величины nv сравнения-понижения ступени-числа
оборотов, а сигнал изменения числа оборотов был отрицательным, то блок 29, выраба5
тывающий сигнал сравнения-нагрузки, оценит это как обычное замедление, связанное
с дорожной ситуацией, и не изменит величину сравнения-повышения ступени-
нагрузки, вводимую в блок 21 оценки на0 грузки. Если сигнал числа оборотов выше,
чем прежде, а сигнал vn изменения числа оборотов был положительным, блок 29 квалифицирует
это как энергетичное ускорение и определит для блока 21 оценки нагрузки
5 описанную величину обгона-сравнения нагрузки ,
Если сигнал числа оборотов имел одинаковую величину с предшествующим и сигнал
vn изменения числа оборотов был
0 отрицательным, блок оценит это как движение
на подъем и определит для блока 21 оценки нагрузки величину движения на подъем-сравнения-нагрузки.
Описанные варианты выполнения спо5 соба можно еще упростить, если не депать
различия между обычным замедлением и энергетичным ускорением. В этом случае
водитель должен активно подавать топливо для вытягивания двигателя 1 на более дли0
тельный срок. Другое упрощение относится исключительно к управлению фрикционным
сцеплением и может применяться в любом из описанных вариантов. Простейшее применение
представлено на блок-схеме по
5 фиг 14.
При описании управления сцеплением указано, что приоритет повышения ступени
можно гарантировать соответствующим выбором условий короткого замыкания и пере0
ключения на более высокую ступень. Это можно осуществить следующим образом.
Величина sf сравнения-повышения ступени-нагрузки и величина srсравнения-ко-
роткого замыкания-нагрузки выбраны
5 одинаково, но командой блока 19 управления
переключением ступеней переключиться на более высокую ступень в блок 25
управления замыканием сцепления подается сигнал запрета, Если таким образом выполняются
условия повышения ступени,
блок 25 управления замыканием сцепления
не может выдать команду на замыкание.
В описанных ранее вариантах в качестве
условия переключения контролировалось число оборотов двигателя. Указывалось на то, что на выходном валу
коробки 2 передач встроен датчик 30 числа оборотов, сигнал с которого также подается
на блок 10 управления Вместо числа оборотов двигателя 1 можно контролировать в
качестве условия переключения число оборотов эточго вала.
На блок-схеме по фиг. 15 видно, что число оборотов двигателя 1, выдаваемое
датчиком 14, используется только для определения величины нагрузки s.
Поскольку сигнал числа оборотов датчика 30 выражает истинную скорость, а не
число оборотов двигателя 1, он корректируется в блоке 31 корректировки ступени в
пропорцию, соответствующую включаемой ступени, и вырабатывается сигнал nseb скорости-числа
оборотов подаваемый в блок 22 оценки числа оборотов, где он сравнивается
с теми же значениями числа оборотов, которые были использованы в описанных
вариантах. Этот вариант имеет то преимущество , что в нем учитывается также действие
гидродинамического преобразователя момента 3 Этот вариант можно комбинировать
со всеми другими вариантами.
В описанных вариантах данные, например
, задавались в каждом случае так, что условия переключения ступеней при наличии
двигателя, например, с автоматической четырехступенчатой коробкой передач и
планетарной передачей могли достаточно сильно отклоняться друг от друга, особенно,
если число ступеней составляет не четыре, поэтому целесообразно определять эти условия
в каждом случае опытным путем.
Особо следует сказать о таких вариантах
способа, где необходимо управлять синхронизированной механической коробкой передач.
Поскольку в таких автомобилях нельзя решить проблему асинхронное™ перекрывающимся
переключением ступеней, необходимо подобрать другой вариант. Такой
вариант заключается, например, в контроле положения синхронности Поскольку число
оборотов двигателя, как и число оборотов приводного вала коробки передач, измеряется
постоянно, положение синхронности можно контролировать, например, С помощью
пробуксовывания сцепления. Коробку передач можно беречь также, управляя вилками переключения передач с
помощью пневматических цилиндров.
Все варианты способа можно осущест-
влять на механических синхронизированных коробках передач.
При создании системы для осущестоления способа отсутствие в линии привода
гидродинамического преобразователя момента и необходимости контроля условий
короткого замыкания могут создавать значительное облегчение.
0Формула изобретения
1. Способ переключения ступеней автоматической
или автоматизированной механической синхронизированной коробки передач автомобиля, имеющего приводную
5 линию, состоящую из двигателя внутреннего сгорания, кинематически связанного через
гидродинамический преобразователь, выполненный с возможностью блокировки
последнего посредством сухой фрикцион0 ной муфты сцепления со ступенчатой автоматической
коробкой передач или связанного через сухую муфту с механической синхронизированной коробкой передач
, к которой через карданный вал
5 присоединен дифференциальный механизм
, связанный по меньшей мере одной парой полуосей с колесами, при этом источник
вспомогательной энергии выполнен с возможностью сообщения посредством
0 электромагнитныхуправляющмх клапанов с управляющими элементами включения муфты
сцепления и ступеней автоматической коробки передач и подачи топлива осуществляется
путем перемещения педали акселе5 ратора, при котором с помощью датчика
частоты вращения измеряют частоту вращения коленчатого вала двигателя или другой
вращающейся детали, число оборотов которой пропорционально числу оборотов ко0
ленчатого вала двигателя, и сигнал на включение передачи формируют с помощью
датчика положения педали акселератора, отличающийся тем, что, с целью
повышения эффективности путем определе5 ния оптимальной точки переключения передач
при любой нагрузке, определяют зависимость между моментом двигателя и
положением педали акселератора и зависимость между моментом двигателя и числом
0 оборотов двигателя и запоминают в электронном блоке памяти, измеряют сигналы,
пропорциональные текущему значению частоты вращение коленчатого вала двигателя
и степени открытия дроссельной заслонки
5 путем сравнения с записанными в блоке
памяти зависимостями, определяют значения моментов, соответствующих текущим
теоретическим значениям степени открытия дроссельной заслонки и частоты вращения
коленчатого вала двигателя, путем
сравнения значений моментов определяют сигнал нагрузки, сигнал нагрузки сравнивают
посредством блока оценки нагрузки с сигналами постоянной величйньгсравнения
повышения ступени и сравнения понижения ступени, сигнал частоты вращения срав-
ниоают посредством блока оценки числа оборотов с сигналом постоянной величины
сравнения-повышения ступени и сравнения- понижения ступени и при уменьшении значения
сигнала нагрузки ниже значения сигнала величины сравнения-повышения ступени и
при увеличении значения сигнала числа оборотов ЁЫше сигнала величины сравнения
повышения ступени формируют с помощью блока переключения скорости
сигнал на включение более высокой передачи и при увеличении значения сигнала нагрузки
выше значения сигнала величины сравнения понижения ступени и при уменьшении
значения сигнала числа оборотов ниже значения сигнала величины сравнения
понижения ступени формируют с помощью блока переключения скорости сигнал переключения
на низшую передачу.
2. Способ по п. 1,о Tvt и чающийся
тем, что определяют зависимость между моментом двигателя и положением педали акселератора
и зависимости между моментом двигателя и числом оборотов двигателя и
запоминают в электронном блоке памяти, измеряют сигналы, пропорциональные текущему
значению частоты вращения коленчатого вала двигателя и степени открытия
дроссельной заслонки путем сравнения с записанными в блоке памяти зависимостями
определяют значения моментов, соответствующих текущим теоретическим
Значениям степени открытия дроссельной заслонки и частоты вращения коленчатого
вала двигателя, путем сравнения значений моментов определяют сигнал нагрузки, дополнительно
определяют сигнал скорости автомобиля с помощью датчика скорости по
числу оборотов любой конструктивной детали или по среднему числу оборотов любой
пары конструктивных деталей участка линии привода автомобиля, начинающегося
входным валом коробки передач и оканчивающегося колесами, преимущественно с
помощью блока корректировки ступени, модифицирующего передачу в соответствии с
включаемой ступенью, сигнал нагрузки сравнивают посредством блока оценки нагрузки
с сигналами постоянной величины сравнения повышения ступени и сравнения
понижения ступени, сигнал скорости сравнивают посредством блока оценки скорости
с сигналом, выражающим постоянную величину сравнения - повышения ступени и
сравнения понижения ступени, и при уменьшении сигнала нагрузки ниже значения, выражающего
величину сравнения повышения ступени, и при увеличении сигнала скорости
выше значения сигнала, выражающего величину сравнения повышения ступени, посредством
блока переключения ступеней формируют сигнал переключения на высшую
ступень и при увеличении сигнала нагрузки
0 выше значения сигнала, выражающего вели-
чину сравнения понижения ступени, и при уменьшении сигнала скорости ниже сигнала,
выражающего величину сравнения понижения ступени, посредством блока управления
5 переключением ступеней формируют сигнал переключения на низшую ступень.
3.Способ по п. 1 или 2, о т л и ч а ю щ и й- с я тем, что сигнал нагрузки дополнительно
сравнивают посредством блока оценки сиг0 нала нагрузки с сигналом сравнения - замыкания
сухой фрикционной муфты сцепления блокировки гидродинамического преобразователя
, сигнал частоты вращения двига е- ля при скорости транспортного средства
5 сравнивают посредством блока оценки числа оборотов с сигналом, выражающим величину
сравнения-расцепления, и при увеличении сигнала частоты вращения двигателя
или скорости транспортного средст0 ва выше значения сигнала, выражающего
величину сравнения-замыкания, и при уменьшении сигнала нагрузки ниже значения
сигнала, выражающего величину сравнения-замыкания , посредством блока
5 управления формируют сигнал на замыкание муфты сцепления гидродинамического
преобразователя, а при уменьшении сигнала частоты вращения двигателя или скорости
движения транспортного средства ниже
0 сигнала, выражающего величину сравнения-расцепления
, формируют сигнал на выключение муфты сцепления.
4.Способ по пп,1-3, отличающийся тем, что измеряют сигнал числа оборотов
5 коленчатого вала двигателя или сигнал скорости транспортного средства, вводят упомянутый
сигнал в блок памяти с учетом сигнала блока управления переключением
ступеней на понижение ступени, затем по0 средством блока вырабатывающего сигнал
сравнения-нагрузки, уменьшают сигнал, выражающий величину сравнения-повышения
ступени, или/и сигнал, выражающий величину сравнения короткого замыкания на
5 величину сигнала частоты вращения коленчатого вала или скорости движения.
5 Способ по пп. 1-3, отличающий- с я тем, что измеряют сигнал числа оборотов
коленчатого вала двигателя или сигнал скорости движения транспортного средства,
вводят упомянутый сигнал в блок памяти с учетом сигнала блока управления переключения
ступеней на понижение ступени, затем посредством блока, вырабатывающего
сигнал сравнения - числа оборотов, увели- чиваютсигнал, выражающий величинусрав-
нения - повышение ступени, и/или сигнал, выражающий величину сравнения короткого
замыкания на поправочную величину, зависящую от величины сигнала частоты
вращения коленчатого вала или скорости движения,
6.Способ по пп. 1-3, отличающий-
с я тем, что с помощью сигнала на понижение ступени блока управления переключе-
нием передач повышают на определенную величину сигнал, выражающий величину
сравнения повышения ступени и/или сигнал , выражающий величину сравнения - короткого
замыкания, или уменьшают на определенную величину сигнал, выражающий
величину сравнения-повышения ступени , и/или возможно сигнал, выражающий
величину сравнения-короткого замыкания.
7.Способ по п 1 или 2, от л и ч а ю щи й-
с я тем, что по сигналу числа оборотов, выражающему число оборотов коленчатого вала
двигателя, или по сигналу скорости при числе оборотов в блоке оценки изменения
числа оборотов вырабатывают сигнал изме- нения числа оборотов и возможно по сигналу
нагрузки в блоке оценки изменения нагрузки вырабатывают сигнал изменения
нагрузки и посредством команды на понижение ступени блока управления переклю-
чением ступеней по мгновенным значениям при отрицательном сигнале изменения числа
оборотов и при сигнале числа оборотов, выражающем число оборотов коленвала
двигателя, имеющем величину ниже порого- вого значения, или при отрицательном сигнале
изменения нагрузки вырабатывают сигнал, выражающий постоянную нормальную
величину сравнения-нагрузки, а при положительном сигнале изменения числа
оборотов и при сигнале числа оборотов, выражающем число оборотов коленвала
двигателя и превышающем пороговое зна
Обычное замедление Ниже nv
Уменьшается
чение, или при попожительном сигнале изменения нагрузки вырабатывают меньший
по сравнению с предыдущим сигналом, выражающим постоянную величину движения
на обгон-сраонениЯ-нагруэки, в то время как при отрицательном сигнале изменения
числа оборотов и при сигнале числа оборотов , выражающем число оборотов коленвала
двигателя и превышающем пороговое значение, или при положительном сигнале
изменения нагрузки вырабатывают очень малый сигнал, выражающий постоянную величину
движения на подъем-сравнения-нз- грузкй и выработанные таким образом
сигналы вводят в блок оценки нагрузки.
8Способ по пп,1,2 или 7, о т л и ч a torn
, и и с я тем, ято посредством команды блока управления переключением ступеней
на понижение ступени при отрицательном сигнале изменения числа оборотов и при
сигнале числа оборотов, выражающем число оборотов коленвзла двигателя и превышающем
пороговое значение, или при положительном сигнале изменения нагрузки
вырабатывается очень малый сигнал, выражающий постоянную величину движения
на подьем-сравнения-нагрузки, а в любом ином случае вырабатывают сигнал, выражающий
постоянную нормальную величину сравнения-нагрузки.
9Способ по одному мз пп, 1-8, о т л и- чающийся тем, что сигнал, выражающий
величину сравнения-повышения ступени- нагрузки, и сигнал, выражающий величину
сравнения-короткого замыкания-нагрузки, равны между собой, а при уменьшении сигнала
нагрузки ниже значения сигнала, выражающего величину сравнения-повышения
ступени-нагрузки, и при увеличении значения сигнала числа оборотов, выбранного
для блока оценки числа оборотов, вьчше значения сигнала, выражающего величину
сравнения-повышения ступени-числа оборотов , в блок управления замыканием сцепления
одновременно с командой на повышение ступени блока управления переключением
ступеней подают сигнал запрета .
Движение на подъем Выше nv
Возрастает
MM Nm
675 -I
0
Mini Nm
675j4 1
ФигЗ
Фиг 2
f(J
2200 n f/PJ
L-Г
Л tf/p
2200
nf 1200
Лг 1ЮО
п0 900 nvzd70
M(n) ii NmJ
675
WOO Фиг 6
2200 n f/pj
12 г:-М
I
I ..
.фиг.7
-Г
/г
io
..-.ч :„ - ., O
//
.
6
Г
//г/70
W.
Ql Мф
w
w
Z21ZSLI
У
Ж
Фиг. 15
Составитель О. Богословский
Техред М.МоргентзлКорректор М. Демчик
1752182

















Комментарии