Способ раскряжевки хлыстов на сортименты на установках с продольной подачей - SU1025324A3
Код документа: SU1025324A3
Чертежи
Описание
фиг.1
Изобретение относится к лесной и деревообрабатывающей промьниленносТи и может быть использовано на автоматических раскряжевочных линиях.
Известен способ раскряжевки хлыстов на сортименты на раскряжёвочных установках с продольной подачей, включакйций разгон хлыста, движение с установившейся скоростью, снижение скорости и включение торможения, не доходя определенных расстояний до позиции останова, останов хлыста, надвигание и отвод режущего инструмента и последующее перемещение хлыста 1,
Недостатком данного способа является то, что тормозной путь определяется установкой датчика положения и является неизменным в каждом ра-. бочем цикле, независимо от размерных и количественных параметров :лыста, причем этот тормозной путь должен выбираться в расчете на самый тяжелый хлыст и самый малый тормозной момент, т.е. должен выбираться максимально большим. Это, в свою очередь ведет к потерям в производительности при разделке хлыстов с меньшей массой , т.е. в пзда вля юще м бол ьши нет ве
рабочих циклов.
Известен также способ раскрйжевки хлыстов на сфртименты, включающий измерение размерных и качественных параметров хлыста, составление на ЭВМ оптимальной программы раскроя хлыста, разгон хлыста, движение с становившейся скоростью, вычисление на ЭВМ и последующую отработку оптимального режима торможения хлыста, останов хлыста, надвигание и отвод режущего органа в исходное положение и последующее перемещение хлыста JJZ .
Недостатком известного способа является недостаточно высокая производительность вследствие того, что надвигание режущего органа начинается только после полной остановки хлыс а, а перемещение хлыста после черёдного цикла резания начинается ишь после останова режущего органа
8 его исходном положении.
Цель изобретения - повышение прозводительности .
Цель достигается тем, что на осноании данных ЭВМ программируют вторую ВМ, на которой вычисляют с учетом араметров хлыста и скорости надвигаия режущего органа оптимальные ускорения при разгоне и торможении.
надвигание режущего органа начинают до останова хлыста, разгон хлыста для его последующего перемещения начинают при отводе режущего органа в исходное положение в момент его выхода из пропила.
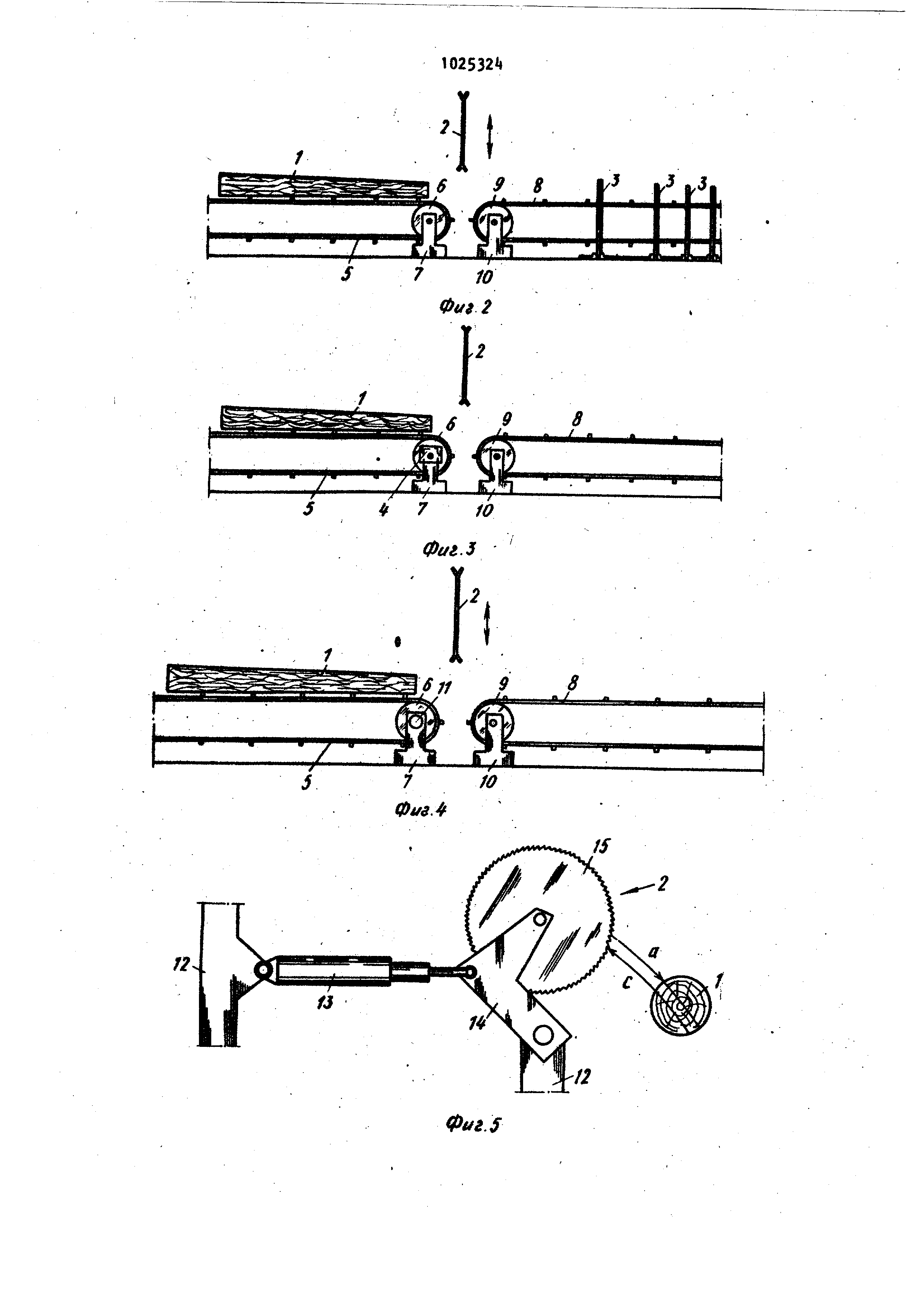
На фиг. 1 изображена схема раскряжевки с поперечной подачей; на фиг. 2 - раскряжевочная устанс«вка
0 с продольной подачей, имеющая упоры для останова хлыста; на фиг. 3 - то же, но с датчиком перемещения хлыста и без упоров; на . k - раскряжевочная установка для осуществления
5 предлагаемого способа, общий вид; на фиг. 5 - режущий орган раскряжевочной установки; на фиг. 6 - диаграмма , поясняющая последовательность операций при осуществлении предлагае0 мого способа.
Раскряжевочные установки для поперечной , разделки хлыста 1 во всех случаях содержат режущий орган 2. Раскряжевочные установки с продоль5 . ной подачей могут иметь силовые упоры 3 (фиг. 2) или же датчик перемещения подающего механизма и, соответственно , хлыста 1. Датчик перемещения может быть выполнен, например, в
0 виде преобразователя Перемещение число импульсов, или Перемещение код . Подающий механизм 9 может быть выполнен в виде транспортера, имеющего тяговый орган (цепь, ленту) 5t установленный на звездочках (шкивах)
5 6, которые смонтированы на раме 7.
Раскряжевочные установки содержат также приемный транспортер, состоящий из тягового органа 8 и его звезгдочек (шкивов), установленных на ра0 ме 10. Подающий механизм (транспортер ) имеет привод П, в качестве которого может, например, использоват ься электрический или гидравлический шаговый двигатель или серводвигатель.
5
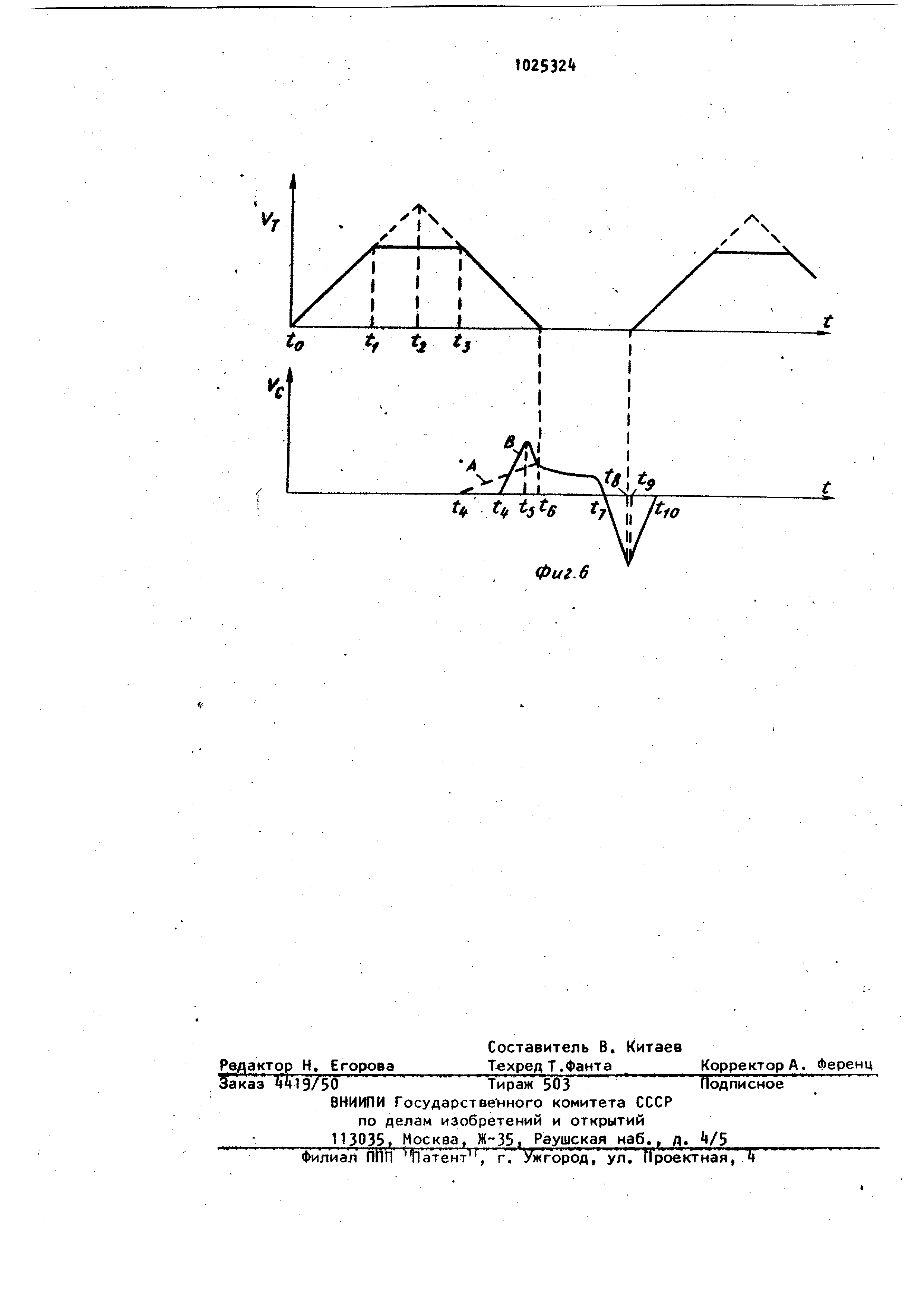
Режущий орган может быть выполнен, в виде установленной на раме 12 и приводимой в движение гидроцн линдром 13 посредством держателя Т круглой пилы 15. На диаграммах (фиг. 6) представлено изменение скорости V«. хлыста 1 (транспортера) и скоростиV пилы 15 в течение времени цикла.
Способ осуществляется следующим образом, .
5
В отличие от широко распространенных существующих способов раскряжевки хлыстов на сортименты, например с поперечной подачей хлыстов (фиг. 1)
или с продольной подачей на установках с силовыми упорами 3 (фиг. 2), предлагаемый способ для своего осуществления не требует ни большого количества пил, ни наличия металлоемких и энергоемких силовых упоров, необходимых для точного останова движущегося хлыста. Предлагаемый способ может осуществляться на безупорных раскряжевочных установках с продольной подачей, в которых точный останов хлыста обеспечивается остановом подающего механизма, например ленты 5 транспортера. Оператор (или ЭВМ), оценив размерные и качественные параметры хлыста, производит заказ на последовательную выпиловку нескольких определенных сортиментов. 8 момент времени tg включается привод 11 и начинается разгон подающего механизма -вместе с хлыстом 1; допустимое ускорение для хлыста на подающем механизме (АИГ..З и i) определяется минимально возможным коэффициентом трения между хлыстом 1 и лентой (цепью ) 5.
В мймент времени t подающий механизм с лежащим на нем хлыстом достигает значения установившейся (номинальной ) скорости и далее продолжает двигаться с этой скоростью. Если длина заказанного сортимента достаг точно мала, то подающий механизм с хлыстом не успевает достичь установившейся скорости. В этом случае команда на торможение должна подаваться системой управления (ЭВМ) в момент времени t. При движениис установившейся скоростью по достижении рассчитанной ЭВМ позиции, в момент tv подается команда на торможение, и в момент tg падающий механизм с хлыстом останавливается. До момента tj ЭВМ определяет, исходя из результатов обмера хлыста и программы раскряжевки , момент времени, в который необходимо подать команду на надвигание режущего органа 2.
В момент . начинается перемещение раскряжевочного устройства. При
этом движение режущего органа может осуществляться по нескольким законам. Так, кривая А характеризует закон, при котором скорость равномерно нарастает до момента врезания пилы в древесину; кривая В - закон, по которому режущий орган сначала разгоняется с максимально возможным ускорением , а затем, пока он еще не достиг
поверхности древесины, подается команда на замедление скорости (в момент времени t), в момент врезания скорость движения подающего механизма была равна нулю. Допустимое ускорение при торможении подающего механизма, как и при разгоне, определяется минимально возможным коэффициентом трения между хлыстом и подающим механизмом.
При заходе пильного диска в ствол скорость надвигания уменьшается, затем после перерезания ствола в момент времени t становится равной нулю, после чего подается команда на ревере пилы с максимальной скоростью, В момент времени tg диск 15 полн9стью выходит из пропила в стволе и в этот же момент ЭВМ подает команду на запуск подающего механизма для отмера длины следующего сортимента; в момент t(j скорость отвода режущего органа начинает замедляться; в момент режущий орган возвращается в исходное положение и подается команда на его останов. При распилке хлыст 1 может также дополнительно фиксироваться каким-либо.механизмом, например рычагами зьхвата, которые двигаются совместно с режущим органом таким образом, чтобы вмомент врезания пилы в хлыст последний был зафиксирован .
Предлагаемый способ позволяет повысить производительность раскряже45 вочных установок с продольной пода- , чей за счет частичного совмещения во времени двух основных циклов процесса раскряжевки - цикла подачи и цикла пиления.
Реферат
Комментарии