Трубоотрезной станок - RU2739359C2
Код документа: RU2739359C2
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к трубоотрезному станку, использующемуся в качестве подвижного отрезного станка в линии производства труб, например. Более конкретно, настоящее изобретение относится к трубоотрезному станку, в котором фреза используется в качестве вращающегося ножа, и труба отрезается посредством перемещения вращающегося ножа в плоскости под прямым углом к трубы, при вращении вращающегося ножа. Здесь, трубоотрезной станок включает подвижный трубоотрезной станок и неподвижный трубоотрезной станок. В дальнейшем описании, плоскость под прямым углом к трубы, подлежащей резанию, называется плоскостью x-y.
Уровень техники
[0002] В линии производства труб, подвижный отрезной станок используется для отрезания трубы, непрерывно изготавливаемой, до постоянного размера. Подвижный отрезной станок отрезает трубу, подлежащую изготовлению, посредством перемещения вращающегося ножа в плоскости под прямым углом к трубы, при этом перемещающегося синхронно с трубой.
[0003] Отрезной станок, раскрытый в патентном документе 1 в качестве такого трубоотрезного станка, является частью системы, где множество вращающихся ножей побуждается совершать круговые движения вдоль внешней периферийной поверхности трубы, при этом вращаясь. Эта отрезная система называется оборотной системой, так как круговые движения вращающихся ножей в периферийном направлении трубы представляют собой оборотные движения. Эта оборотная система, в частности, называется системой x-y, так как положения вращающихся ножей регулируются в двух направлениях осей x-y.
[0004] Оборотная отрезная система, отличная от системы x-y, включает в себя: θ-θ систему, в которой качающиеся рычаги прикреплены во множестве положений в периферийном направлении лицевой пластины, через которую труба должна проходить, при этом вращающиеся ножи поддерживаются на концах качающихся рычагов, и углы качания качающихся рычагов и угол поворота лицевой пластины регулируются; и R-θ систему, в которой вращающиеся ножи прикреплены во множестве положений в периферийном направлении лицевой пластины, через которую труба должна проходить таким образом, чтобы быть подвижной в радиальном направлении, и положения вращающихся ножей в радиальном направлении и угол поворота лицевой пластины регулируются.
[0005] Оборотный отрезной станок имеет преимущество, заключающееся в обеспечении возможности высокоскоростного отрезания, используя вращающийся нож небольшого диаметра относительно диаметра трубы и небольшой ход перемещения вращающегося ножа. Оборотный отрезной станок, имеющий это преимущество, используется в качестве подвижного отрезного станка в линии производства труб, а также используется в качестве неподвижного отрезного станка.
Документы предшествующего уровня техники
Патентные документы
[0006] Патентный документ 1: японская рассмотренная патентная публикация No.3422576
Сущность изобретения
Проблема, решаемая изобретением
[0007] Оборотный отрезной станок имеет недостаток, заключающийся в том, что, так как положения множества вращающихся ножей требуют регулирования в двух направлениях в плоскости x-y, приводной механизм и механизм регулирования положения становятся более сложными и имеют большие размеры. Это неизбежно вызывает увеличение веса и повышение стоимости, и может повысить вероятность отказа.
[0008] Также имеется прямолинейная система (R система), отличная от оборотной системы, в которой, хотя вращается один вращающийся нож, вращающийся нож перемещается линейно в направлении диаметра трубы. Хотя эта система имеет простую конфигурацию, требуется, чтобы вращающийся нож имел радиус, существенно больший, чем диаметр трубы. Увеличенный радиус вращающегося ножа вызывает проблему понижения точности резания, и т.д.
[0009] Настоящее изобретение предназначено для обеспечения трубоотрезного станка, способного эффективно отрезать трубу даже большого диаметра с высокой точностью за короткий период времени и достигать превосходной экономической эффективности и превосходной долговечности с помощью простой, компактной и легковесной конфигурации.
Средства решения проблемы
[0010] Для достижения вышеприведенной цели, трубоотрезной станок настоящего изобретения представляет собой неподвижный или подвижный трубоотрезной станок, который отрезает трубу под прямым углом к осевой линии трубы, содержащий:
вращающиеся ножи в паре, с плоскостью под прямым углом к осевой линии трубы, подлежащей резанию, заданной в качестве плоскости x-y, и центром трубы, заданным в качестве начала координат, при этом вращающиеся ножи расположены обращенными друг к другу на обеих сторонах оси y таким образом, что режущие кромки вращающихся ножей накладываются друг на друга в направлении оси x;
механизм приведения в прямолинейное движение, который приводит вращающиеся ножи в паре в прямолинейное движение в противоположных направлениях относительно направления оси y таким образом, чтобы заставлять вращающиеся ножи в паре проходить мимо друг друга на оси x и вблизи оси x; и
приводной механизм преобразования направления, который изменяет часть прямолинейного приводного усилия в направлении оси y на усилие в направлении оси x и перемещает по меньшей мере один из вращающихся ножей в паре наружу для отдаления от оси y для исключения взаимодействия между режущими кромками, когда вращающиеся ножи в паре проходят мимо друг друга на оси x и вблизи оси x.
[0011] В трубоотрезном станке настоящего изобретения, вращающиеся ножи в паре, которые расположены на обеих сторонах оси y в плоскости x-y таким образом, что режущие кромки накладываются друг на друга в направлении оси x, приводятся в прямолинейное движение в противоположных направлениях относительно направления оси y. Когда вращающиеся ножи в паре проходят мимо друг друга на оси x и вблизи оси x, часть прямолинейного приводного усилия в направлении оси y преобразуется в усилие в направлении оси x, и вращающиеся ножи в паре перемещаются в направлениях, в которых вращающиеся ножи отдаляются от оси y, а именно, совершают направленные наружу отделяющие движения. Посредством осуществления этого, исключается взаимодействие между соответствующими режущими кромками вращающихся ножей в паре. В трубоотрезном станке настоящего изобретения, приводной механизм преобразования направления содержит: смещающий нож механизм, который прикладывает смещающее усилие к по меньшей мере одному из вращающихся ножей в паре по направлению внутрь для приближения к оси y и удерживает смещенный вращающийся нож в предельном положении внутреннего перемещения; и направляющий механизм, который побуждает по меньшей мере один из вращающихся ножей в паре совершать направленное наружу отводное движение против смещающего усилия, когда вращающиеся ножи в паре проходят мимо друг друга на оси x и вблизи оси x. Смещающий нож механизм представляет собой упругий элемент, который упруго прижимает и удерживает по меньшей мере один из вращающихся ножей в паре в предельном положении внутреннего перемещения, или механизм давления, использующий давление текучей среды, который прижимает и удерживает по меньшей мере один из вращающихся ножей в паре под действием давления текучей среды в предельном положении внутреннего перемещения. Направляющий механизм включает в себя криволинейную направляющую, выступающую наружу. Вращающиеся ножи приводятся в движение посредством гидравлического двигателя. Гидравлический двигатель непосредственно соединен с вращающимися ножами. Трубоотрезной станок настоящего изобретения дополнительно содержит передний зажим и задний зажим, расположенные на передней стороне и задней стороне, соответственно, если смотреть от плоскости резания, для отрезания с помощью вращающихся ножей в паре, и использующиеся для фиксации трубы. Задний зажим зажимает трубу в направлении оси y, соответствующем направлениям, в которых вращающиеся ножи приводятся в прямолинейное движение. Как передний зажим, так и задний зажим зажимают трубу в направлении оси y, соответствующем направлениям, в которых вращающиеся ножи приводятся в прямолинейное движение. Трубоотрезной станок настоящего изобретения дополнительно содержит ящик для сбора порошка от резания, который охватывает диапазон перемещений вращающихся ножей в паре для сбора порошка от резания, получающегося от резания трубы. Ящик для сбора порошка от резания включает в себя дверцу открывания/закрывания для открывания и закрывания открывающейся части ящика для сбора порошка от резания на передней стороне и поддерживает передний зажим, используя дверцу открывания/закрывания.
Преимущества изобретения
[0012] В трубоотрезном станке настоящего изобретения, вращающиеся ножи в паре, которые расположены на обеих сторонах оси y в плоскости x-y таким образом, что режущие кромки накладываются друг на друга в направлении оси x, приводятся в прямолинейное движение в противоположных направлениях относительно направления оси y. Более того, взаимодействие между режущими кромками исключено посредством использования прямолинейного приводного усилия в направлении оси y. Таким образом, даже если труба имеет относительно большой диаметр, труба по-прежнему эффективно отрезается с высокой точностью за короткий период времени. Кроме того, простая конфигурация достигает компактности и легковесности, и превосходной экономической эффективности и превосходной долговечности.
Краткое описание чертежей
[0013] Фиг.1 представляет собой вид спереди трубоотрезного станка, показывающий первый вариант осуществления настоящего изобретения;
Фиг.2 представляет собой вид спереди трубоотрезного станка, показывающий второй вариант осуществления настоящего изобретения;
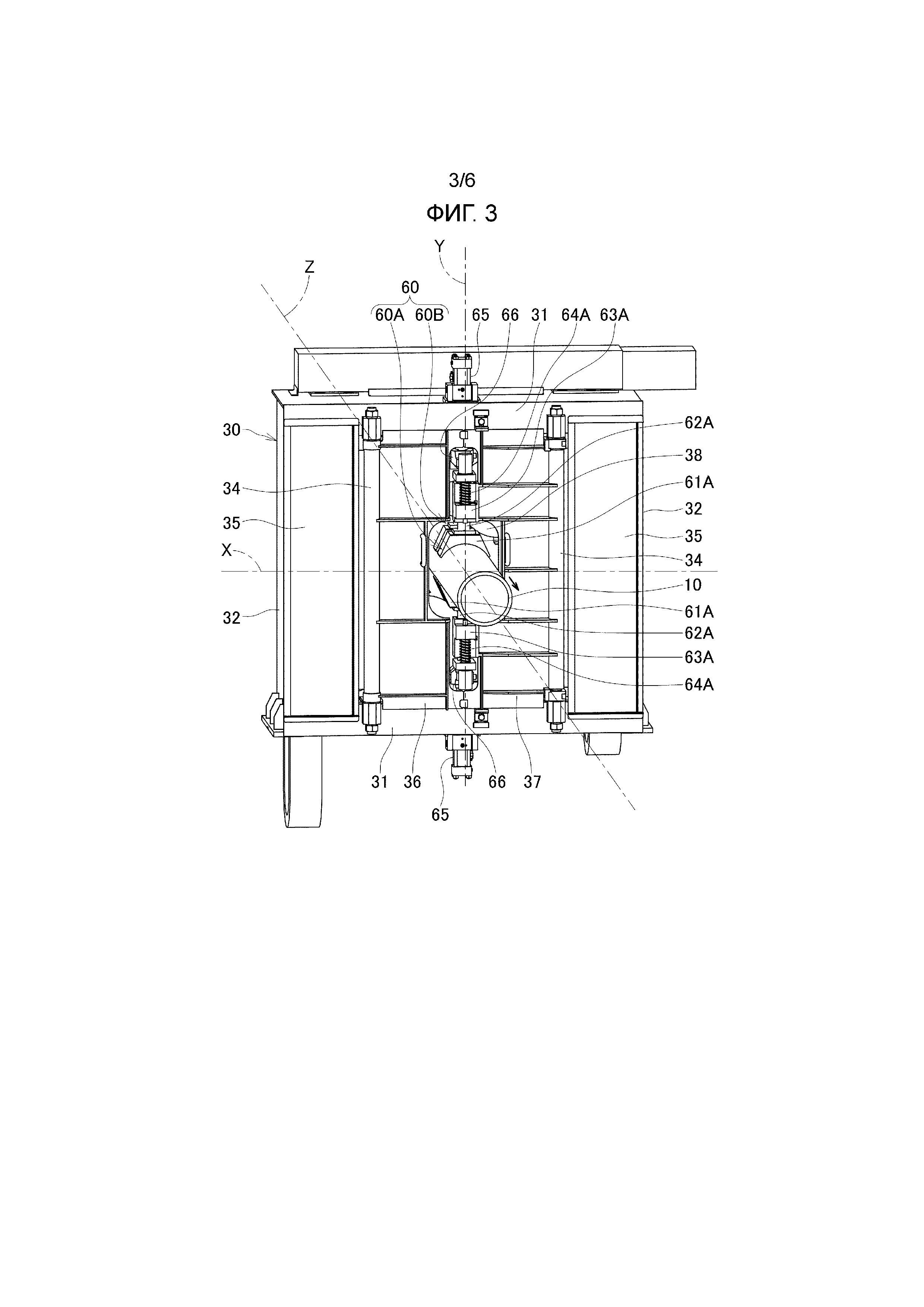
Фиг.3 представляет собой перспективный вид трубоотрезного станка, показывающий третий вариант осуществления настоящего изобретения, взятый спереди;
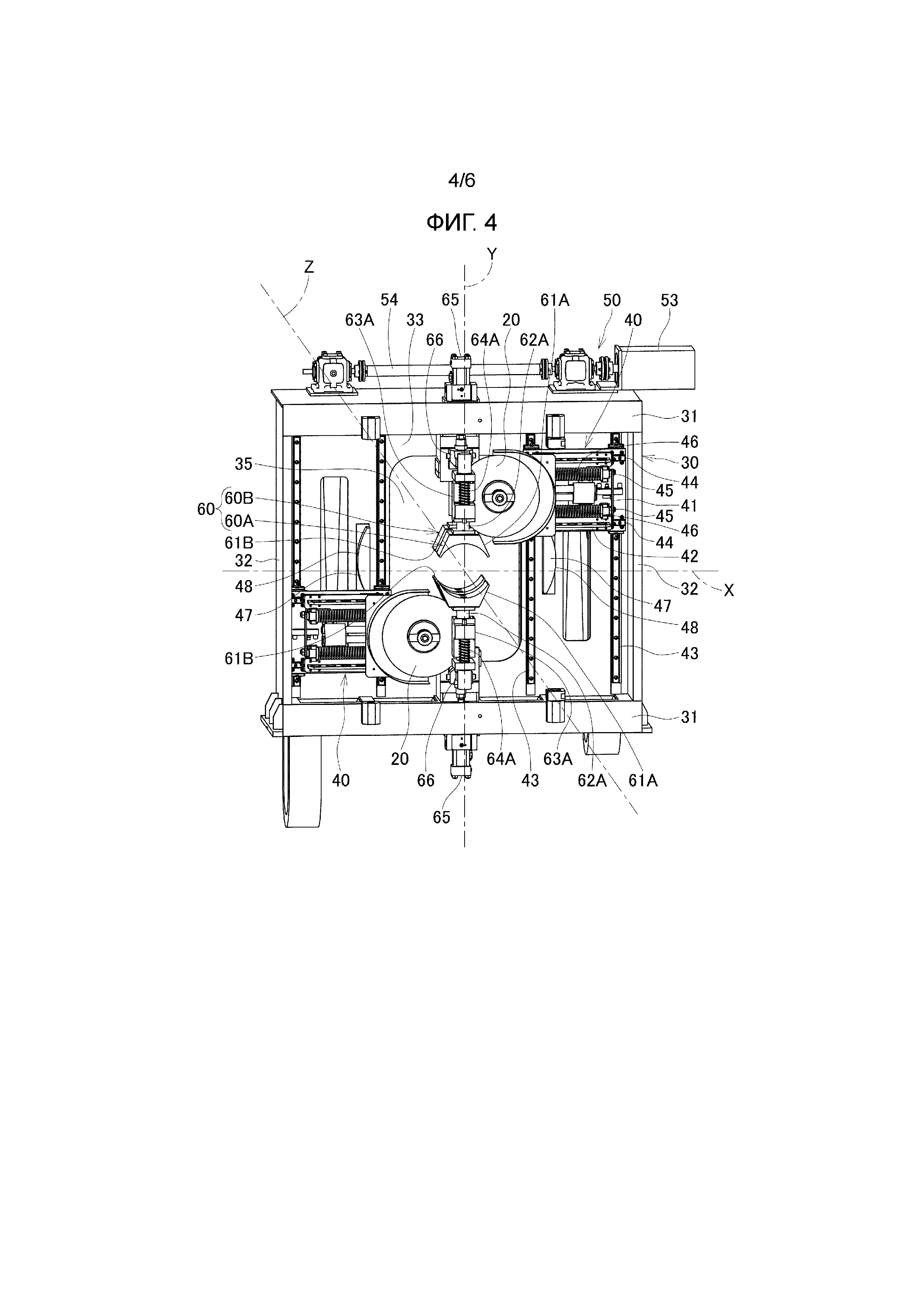
Фиг.4 представляет собой перспективный вид этого трубоотрезного станка, взятый спереди и показывающий состояние, в котором трубоотрезной станок открыт на передней стороне;
Фиг.5 представляет собой перспективный вид этого трубоотрезного станка, взятый сзади; и
Фиг.6 представляет собой перспективный вид этого трубоотрезного станка, взятый сзади и показывающий принципиальные конструкции.
Варианты осуществления изобретения
[0014] Варианты осуществления настоящего изобретения будут описываться ниже.
[0015] Трубоотрезной станок первого варианта осуществления будет описываться сначала со ссылкой на фиг.1.
[0016] Трубоотрезной станок первого варианта осуществления представляет собой трубоотрезной станок, который отрезает трубу 10 под прямым углом к осевой линии трубы 10. Трубоотрезной станок включает в себя: вращающиеся ножи 20, 20 в паре, с плоскостью под прямым углом к осевой линии трубы 10, подлежащей резанию, заданной в виде плоскости x-y, и центром трубы, заданным в виде начала системы координат, при этом вращающиеся ножи 20, 20 расположены на обеих сторонах оси y таким образом, что режущие кромки вращающихся ножей 20, 20 накладываются друг на друга в направлении оси x; механизм 50 приведения в прямолинейное движение, который приводит вращающиеся ножи 20, 20 в паре в прямолинейное движение в противоположных направлениях относительно направления оси y таким образом, чтобы заставлять вращающиеся ножи 20, 20 в паре проходить мимо друг друга на оси x и вблизи оси x; и приводной механизм 46 преобразования направления и приводной механизм 47 преобразования направления, которые изменяют часть прямолинейного приводного усилия в направлении оси y на усилие в направлении оси x и перемещают по меньшей мере один (здесь, оба) из вращающихся ножей 20, 20 в паре наружу для отдаления от оси y для исключения взаимодействия между режущими кромками, когда вращающиеся ножи 20 в паре проходят мимо друг друга на оси x и вблизи оси x.
[0017] В вышеприведенной конфигурации, вращающиеся ножи 20, 20 в паре, которые расположены на обеих сторонах оси y в плоскости x-y таким образом, что режущие кромки накладываются друг на друга в направлении оси x, приводятся в прямолинейное движение в противоположных направлениях относительно направления оси y. Когда вращающиеся ножи 20, 20 в паре проходят мимо друг друга на оси x и вблизи оси x, часть прямолинейного приводного усилия в направлении оси y преобразуется в усилие в направлении оси x, и оба вращающихся ножа 20, 20 в паре совершают направленные наружу отделяющие движения для отдаления от оси y. Посредством осуществления этого, исключается взаимодействие между соответствующими режущими кромками вращающихся ножей 20, 20 в паре.
[0018] Таким образом, труба 10 отрезается. Таким образом, даже если труба 10 имеет большой диаметр, труба 10 по-прежнему эффективно отрезается с высокой точностью за короткий период времени. Кроме того, простая конфигурация достигает компактности и легковесности станка, и предпочтительной экономической эффективности и предпочтительной долговечности.
[0019] Трубоотрезной станок второго варианта осуществления будет описываться далее со ссылкой на фиг.2.
[0020] Трубоотрезной станок второго варианта осуществления представляет собой трубоотрезной станок, который отрезает трубу 10 под прямым углом к осевой линии трубы 10. Трубоотрезной станок включает в себя: вращающиеся ножи 20, 20 в паре, с плоскостью под прямым углом к осевой линии трубы 10, подлежащей резанию, заданной в виде плоскости x-y, и центром трубы, заданным в виде начала системы координат, при этом вращающиеся ножи 20, 20 расположены на обеих сторонах оси y таким образом, что режущие кромки вращающихся ножей 20, 20 накладываются друг на друга в направлении оси x; механизм 50 приведения в прямолинейное движение, который приводит вращающиеся ножи 20, 20 в паре в прямолинейное движение в противоположных направлениях относительно направления оси y таким образом, чтобы заставлять вращающиеся ножи 20, 20 в паре проходить мимо друг друга на оси x и вблизи оси x; и приводной механизм 46 преобразования направления и приводной механизм 47 преобразования направления, которые изменяют часть прямолинейного приводного усилия в направлении оси y на усилие в направлении оси x и перемещают по меньшей мере один (здесь, один) из вращающихся ножей 20, 20 в паре наружу для отдаления от оси y для исключения взаимодействия между режущими кромками, когда вращающиеся ножи 20 в паре проходят мимо друг друга на оси x и вблизи оси x.
[0021] В вышеприведенной конфигурации, вращающиеся ножи 20, 20 в паре, которые расположены на обеих сторонах оси y в плоскости x-y таким образом, что режущие кромки вращающихся ножи 20, 20 накладываются друг на друга в направлении оси x, приводятся в прямолинейное движение в противоположных направлениях относительно направления оси y. Когда вращающиеся ножи 20, 20 в паре проходят мимо друг друга на оси x и вблизи оси x, часть прямолинейного приводного усилия в направлении оси y преобразуется в усилие в направлении оси x, и один из вращающихся ножей 20, 20 в паре совершает направленное наружу отделяющее движение для отдаления от оси y. Посредством осуществления этого, исключается взаимодействие между соответствующими режущими кромками вращающихся ножей 20, 20 в паре.
[0022] Таким образом, труба 10 отрезается. Таким образом, даже если труба 10 имеет большой диаметр, труба 10 по-прежнему эффективно отрезается с высокой точностью за короткий период времени. Кроме того, простая конфигурация достигает компактности и легковесности станка, и предпочтительной экономической эффективности и предпочтительной долговечности.
[0023] Трубоотрезной станок третьего варианта осуществления будет описываться далее со ссылкой на фиг.3-6. На фиг.1 показаны принципиальные конструкции трубоотрезного станка, показанного на фиг.3-6.
[0024] Трубоотрезной станок третьего варианта осуществления используется в качестве подвижного отрезного станка, который отрезает трубу на выходе производственной линии свариваемых электросваркой сопротивлением труб, например, выпускаемую непрерывно из этой линии, при этом перемещаясь вместе с трубой.
[0025] Как показано на фиг.3-6, трубоотрезной станок этого варианта осуществления предназначен для отрезания трубы 10 с помощью вращающихся ножей 20, 20, расположенных обращенными друг к другу на обеих сторонах проходного центра (а именно, осевой линии) трубы 10. В описании, приведенном ниже, плоскость под прямым углом к проходного центра (а именно, осевой линии) трубы 10 представляет собой плоскость x-y, при этом ось x представляет собой горизонтальную линию, ось y представляет собой вертикальную линию, перпендикулярную относительно горизонтальной линии, и ось z представляет собой проходной центр (а именно, осевую линию) трубы 10. На каждой из фиг.3 и 4, ближняя сторона называется стороной выхода линии, конкретно, стороной выпуска трубы 10 и передней стороной. Более того, дальняя сторона называется стороной входа линии, конкретно, стороной входа трубы 10 и задней стороной.
[0026] Этот трубоотрезной станок включает в себя: вращающиеся ножи 20, 20, расположенные обращенными друг к другу в плоскости x-y, в частности на обеих сторонах оси y, таким образом, что режущие кромки вращающихся ножей 20, 20 накладываются друг на друга в направлении оси x; механизм 50 приведения в прямолинейное движение, который приводит вращающиеся ножи 20, 20 на обеих сторонах в прямолинейное движение в противоположных направлениях относительно направления оси y таким образом, чтобы заставлять вращающиеся ножи 20, 20 на обеих сторонах проходить мимо друг друга на оси x и вблизи оси x; приводной механизм преобразования направления, который изменяет часть прямолинейного приводного усилия в направлении оси y на усилие в направлении оси x и заставляет вращающиеся ножи 20, 20 в паре совершать отделяющие движения в направлениях, в которых вращающиеся ножи 20, 20 отдаляются от оси y (а именно, наружу), когда вращающиеся ножи 20, 20 на обеих сторонах проходят мимо друг друга на оси x и вблизи оси x; и зажимной механизм 60, который фиксирует трубу 10, подлежащую резанию.
[0027] Вращающиеся ножи 20, 20 на обеих сторонах расположены в прямоугольной раме 30, окружающей проходной центр (а именно, ось z) трубы 10. Более конкретно, вращающиеся ножи 20, 20 на обеих сторонах смонтированы на ножевых узлах 40, 40 на обеих сторонах, расположенных в раме 30, таким образом, что режущие кромки накладываются друг на друга в направлении оси x.
[0028] Рама 30 включает в себя верхний и нижний горизонтальные элементы 31, 31 в паре, между которыми ось z удерживается сверху и снизу, правый и левый перпендикулярные элементы 32, 32 в паре, между которыми ось z удерживается с обеих сторон, прямоугольную перпендикулярную заднюю пластину 33, прикрепленную внутри этих элементов, и соединительные стержни 34, 34 на обеих сторонах для соединения верхнего и нижнего горизонтальных элементов 31, 31 на передней стороне. Задняя пластина 33 имеет центральный участок, где отверстие 35 предусмотрено для побуждения прохода трубы 10 через него.
[0029] Открывающаяся часть рамы 30 на передней стороне закрывается блокирующими пластинами 36, 36 на обеих сторонах, расположенными снаружи соединительных стержней 34, 34 на обеих сторонах, и двойными шарнирными дверцами 37, 37 открывания/закрывания, расположенными внутри соединительных стержней 34, 34. Дверцы 37, 37 открывания/закрывания, имеющие двойную шарнирную конструкцию, закрывают открывающуюся часть рамы 30 на передней стороне, при этом оставляя незакрытым отверстие 38 для побуждения прохода трубы 10 через него и пространство для зажимного механизма 60, в частности для переднего зажима 60A зажимного механизма 60, описанного позже, и совершают открывающие и закрывающие движения на соединительных стержнях 34, 34 на обеих сторонах в качестве шарнирных осей.
[0030] Рама 30 образует ящик для сбора порошка от резания вместе с задней пластиной 33 на задней стороне, блокировочными пластинами 36, 36 на передней стороне и двойными шарнирными дверцами 37, 37 открывания/закрывания. Одна из дверец 37, 37 открывания/закрывания функционирует в качестве поддерживающего элемента для переднего зажима 60A, как описано подробно позже.
[0031] Ножевые узлы 40, 40 на обеих сторонах расположены обращенными друг к другу на противоположных сторонах оси z в качестве проходного центра. Конфигурация каждого из ножевых узлов 40, 40 включает в себя комбинацию первого подвижного тела 41, подвижного в направлении оси y, и второго подвижного тела 42, подвижного в направлении оси x.
[0032] Первое подвижное тело 41 располагается на стороне выхода линии, а именно, на передней стороне, если смотреть от задней пластины 33, в раме 30. Первое подвижное тело 41 поддерживается таким образом, чтобы быть свободно подвижным в направлении оси y посредством двух линейных направляющих 43 в направлении оси y, прикрепленных к поверхности задней пластины 33 на передней стороне. Первые подвижные тела 41 синхронно приводятся в движение в противоположных направлениях относительно направления оси y и симметричным образом посредством механизма 50 приведения в прямолинейное движение.
[0033] Механизм 50 приведения в прямолинейное движение переходит из положения на задней стороне, если смотреть от задней пластины 33, в раме 30, в положение выше рамы 30, и синхронно приводит в движение ножевые узлы 40, 40 на обеих сторонах, в частности, первые подвижные тела 41, 41, в противоположных направлениях относительно направления оси y и симметричным образом.
[0034] Более конкретно, механизм 50 приведения в прямолинейное движение включает в себя винтовые стержни 51, 51 на обеих сторонах, поддерживаемые перпендикулярно и свободно вращаемыми на задней стороне, если смотреть от задней пластины 33, и шариковые винты 52, 52 на обеих сторонах, сцепляемые посредством резьбы с винтовыми стержнями 51, 51 на обеих сторонах. Шариковые винты 52, 52 на обеих сторонах соединены с первыми подвижными телами 41, 41, поддерживаемыми на передней стороне, если смотреть от задней пластины 33. Винтовые стержни 51, 51 на обеих сторонах синхронно приводятся во вращение в противоположных направлениях посредством двигателя 53 и соединительного вала 54, размещенного на раме 30. В результате, первые подвижные тела 41, 41 на обеих сторонах синхронно приводятся в движение в противоположных направлениях относительно направления оси y и симметричным образом, как описано выше.
[0015] Более конкретно, когда одно из первых подвижных тел 41, 41 перемещается вниз из верхнего положения готовности в нижнее положение готовности в раме 30, другое первое подвижное тело 41 перемещается вверх из нижнего положения готовности в верхнее положение готовности в раме 30. Посредством осуществления этого, ножевые узлы 40, 40 на обеих сторонах приводятся в прямолинейное движение вместе с вращающимися ножами 20, 20 в противоположных направлениях относительно направления оси y и симметричным образом, чтобы проходить мимо друг друга на оси x и вблизи оси x.
[0036] Второе подвижное тело 42 размещается на передней стороне, если смотреть от первого подвижного тела 41. Второе подвижное тело 42 имеет внутренний участок рядом с осью y, на котором вращающийся нож 20 и вращающийся привод 21 для вращающегося ножа 20 поддерживаются вместе. Здесь, вращающийся привод 21 представляет собой гидравлический двигатель. Вращающийся нож 20, который находится на передней стороне, если смотреть от вращающегося привода 21, соединен без задействования механизма замедления (а именно, непосредственно соединен) с вращающимся приводом 21.
[0037] Второе подвижное тело 42 прикрепляется посредством упругого элемента 46 в качестве смещающего нож механизма к первому подвижному телу 41 на передней стороне, если смотреть от первого подвижного тела 41. Более конкретно, второе подвижное тело 42 поддерживается свободно подвижным в направлении оси x посредством двух линейных направляющих 44, проходящих в направлении оси x, прикрепленных к поверхности первого подвижного тела 41 на передней стороне, и смещается внутрь посредством упругих элементов 46, подобных цилиндрическим винтовым пружинам, размещенных на двух стержнях 45, также проходящих в направлении оси x. Когда второе подвижное тело 42 упруго удерживается посредством смещающего усилия во внутреннем крайнем положении в диапазоне подвижности, вращающиеся ножи 20, 20 на ножевых узлах 40, 40 побуждают их режущие кромки накладываться друг на друга в направлении оси x.
[0038] Криволинейные направляющие 47, 47 в качестве направляющих механизмов, выступают от поверхности задней пластины 23 на передней стороне симметричным образом поперек оси z в качестве проходного центра. Каждая из криволинейных направляющих 47 находится на оси x и включает в себя дугообразную направляющую поверхность 48, выступающую наружу.
[0039] Это будет описано подробно. Часть второго подвижного тела 42 проходит через первое подвижное тело 41 на задней стороне, если смотреть от второго подвижного тела 42, чтобы равномерно выступать по направлению к задней стороне, если смотреть от первого подвижного тела 41, и поддерживает контактный элемент 49, размещенный на задней стороне, если смотреть от первого подвижного тела 41. Контактный элемент 49 представляет собой ролик, прилегающий к направляющей поверхности 48 криволинейной направляющей 47 в качестве направляющего механизма. Контактный элемент 49 направляется вдоль направляющей поверхности 48, когда ножевой узел 40 проходит по оси x и вблизи оси x, таким образом, чтобы смещаться наружу.
[0040] В результате этого направленного наружу смещения второго подвижного тела 42, ножевой узел 40 совершает направленное наружу отводное движение дугообразным образом против смещающего усилия упругого элемента 46, когда ножевой узел 40 проходит по оси x и вблизи оси x, тем самым исключая возникновение взаимодействия между вращающимися ножами 20, 20 на обеих сторонах.
[0041] Как понятно из вышеуказанного, вышеприведенный приводной механизм преобразования направления предназначен для исключения взаимодействия между режущими кромками, возникающего, когда вращающиеся ножи 20, 20 на обеих сторонах проходят мимо друг друга на оси x и вблизи оси x, посредством преобразования части прямолинейного приводного усилия в направлении оси y в усилие в направлении оси x и побуждения вторых подвижных тел 42, 42 в ножевых узлах 40, 40 совершать направленные наружу отделяющие движения, когда вращающиеся ножи 20, 20 проходят мимо друг друга на оси x и вблизи оси x. С другой стороны, конфигурация приводного механизма преобразования направления включает в себя комбинацию упругого элемента 46, предусмотренного в качестве смещающего нож механизма в ножевом узле 40, и криволинейной направляющей 47, предусмотренной в качестве направляющего механизма на поверхности задней пластины 23 на передней стороне.
[0042] Зажимной механизм 60 включает в себя передний зажим 60A и задний зажим 60B в качестве передней-задней пары, предусмотренной на передней стороне, если смотреть от задней пластины 33, в раме 30. Передний зажим 60A и задний зажим 60B в качестве передней-задней пары расположены спереди и сзади плоскости x-y в качестве плоскости для размещения вращающихся ножей 20, 20 и в качестве плоскости резания (а именно, на передней стороне и задней стороне, если смотреть от плоскости x-y), соответственно.
[0043] Передний зажим 60A на передней стороне предназначен для неподвижного удерживания трубы 10 сверху и снизу на передней стороне, если смотреть от плоскости резания, для отрезания с помощью вращающихся ножей 20, 20, в частности, в положении рядом с плоскостью резания. Более конкретно, передний зажим 60A включает в себя: верхнюю и нижнюю зажимные головки 61A, 61A для удерживания; перпендикулярные стержнеобразные поддерживающие элементы 62A, 62A, которые поддерживают верхнюю и нижнюю зажимные головки 61A, 61A сверху и снизу; верхний и нижний направляющие элементы 63A, 63A, которые направляют поддерживающие элементы 62A, 62A в перпендикулярном направлении; и верхнюю и нижнюю пружины 64A, 64A, которые смещают поддерживающие элементы 62A, 62A вверх и вниз относительно верхнего и нижнего направляющих элементов 63A, 63A.
[0044] Передний зажим 60A, в частности, направляющие элементы 63A, 63A переднего зажима 60A прикреплены к внутреннему краевому участку одной из двойных шарнирных дверец 37, 37 открывания/закрывания, здесь, правой дверце 37 открывания/закрывания, от смотрящего. Таким образом, когда правая дверца 37 открывания/закрывания изменяет закрытое состояние на открытое состояние, передний зажим 60A совершает круговое движение по направлению к передней стороне вокруг правого соединительного стержня 34 для открывания вращающихся ножей 20, 20 на передней стороне.
[0045] Задний зажим 60B на задней стороне предназначен для неподвижного удерживания трубы 10 сверху и снизу на задней стороне, если смотреть от плоскости резания, для отрезания с помощью вращающихся ножей 20, 20, в частности, в положении рядом с плоскостью резания. Задний зажим 60B расположен между вращающимися приводами 21, 21 для приведения в движение вращающихся ножей 20, 20. Задний зажим 60B включает в себя: верхнюю и нижнюю зажимные головки 61B, 61B; перпендикулярные стержнеобразные поддерживающие элементы 62B, 62B, которые поддерживают верхнюю и нижнюю зажимные головки 61B, 61B сверху и снизу; и верхний и нижний направляющие элементы 63B, 63B, которые направляют поддерживающие элементы 62B, 62B в перпендикулярном направлении. Верхний и нижний направляющие элементы 63B, 63B поддерживаются рамой 30.
[0046] Цилиндры 65, 65, предусмотренные сверху и снизу рамы 30 и использующиеся совместно между передней стороной и задней стороной, прижимают поддерживающие элементы 62A, 62A переднего зажима 60A и поддерживающие элементы 62B, 62B заднего зажима 60B сверху и снизу посредством перемещающихся вверх-вниз головок 66, 66, также использующихся совместно между передней стороной и задней стороной. Посредством осуществления этого, труба 10 неподвижно удерживается сверху и снизу в каждом из положения на передней стороне, если смотреть от плоскости резания и рядом с плоскостью резания, и положения на задней стороне, если смотреть от плоскости резания и рядом с плоскостью резания, посредством зажимных головок 61A, 61A переднего зажима 60A и зажимных головок 61B, 61B заднего зажима 60B.
[0047] Верхний и нижний поддерживающие элементы 62B, 62B заднего зажима 60B соединяются с верхней и нижней перемещающимися вверх-вниз головками 66, 66. При этом, верхний и нижний поддерживающие элементы 62A, 62A переднего зажима 60A отсоединяются от (расцепляются с) верхней и нижней перемещающимися вверх-вниз головками 66, 66 для обеспечения возможности совершения передним зажимом 60A кругового движения по направлению к передней стороне.
[0048] В результате этих соединенного состояния и отсоединенного состояния, когда верхняя и нижняя перемещающиеся вверх-вниз головки 66, 66 возвращаются в их начальные положения, верхний и нижний поддерживающие элементы 62B, 62B заднего зажима 60B приводятся в движение для возврата в их начальные положения. При этом, верхний и нижний поддерживающие элементы 62A, 62A переднего зажима 60A не приводятся в движения для возврата в их начальные положения посредством верхней и нижней перемещающихся вверх-вниз головок 66, 66. В качестве альтернативы этому, верхний и нижний поддерживающие элементы 62A, 62A совершают движения для возврата в их начальные положения в ответ на смещающее усилие, прикладываемое от верхней и нижней пружин 64A, 64A.
[0049] Движение резания трубы посредством трубоотрезного станка третьего варианта осуществления будет описано далее.
[0050] В состоянии готовности, один из ножевых узлов 40, 40 на обеих сторонах находится в верхнем положении готовности, а другой ножевой узел 40 находится в нижнем положении готовности. Верхняя и нижняя зажимные головки 61A, 61A переднего зажима 60A и верхняя и нижняя зажимные головки 61B, 61B заднего зажима 60B - обе открываются вертикально. Более того, двойные шарнирные дверцы 37, 37 открывания/закрывания закрыты.
[0051] Когда труба 10, подлежащая резанию, проходит через отрезной станок, верхний и нижний цилиндры 65, 65 активируются для приведения в движение верхней и нижней зажимных головок 61A, 61A переднего зажима 60A и верхних и нижних зажимных головок 61B, 61B заднего зажима 60B в направлениях закрывания этих зажимных головок. Посредством осуществления этого, труба 10 удерживается сверху и снизу и фиксируется спереди и сзади плоскости резания.
[0052] После того как труба зафиксирована, вращающиеся ножи 20, 20 на обеих сторонах начинают вращаться. Вместе с этими вращениями, ножевые узлы 40, 40 на обеих сторонах начинают прямолинейно перемещаться из их положений готовности в их противоположные положения готовности. Более конкретно, один из ножевых узлов 40, 40 начинает перемещаться вниз из верхнего положения готовности в нижнее положение готовности, а другой ножевой узел 40 начинает перемещаться вверх из нижнего положения готовности в верхнее положение готовности.
[0053] Посредством осуществления этого, вращающиеся ножи 20, 20 на обеих сторонах, смонтированные на соответствующих одних из ножевых узлов 40, 40 на обеих сторонах, прямолинейно перемещаются из симметричных положений поперек оси x (а именно, верхнего положения готовности и нижнего положения готовности) к оси x, проходят мимо друг друга на оси x и вблизи оси x, и перемещаются в противоположные симметричные положения (а именно, нижнее положение готовности и верхнее положение готовности). Вращающиеся ножи 20, 20 на обеих сторонах размещены в положениях, где их режущие кромки накладываются друг на друга в направлении оси x. Таким образом, труба 10 эффективно отрезается за короткий период времени посредством прямолинейных движений двух вращающихся ножей 20, 20 в направлении оси y.
[0054] Когда вращающиеся ножи 20, 20 на обеих сторонах должны проходить мимо друг друга на оси x и вблизи оси x, режущие кромки взаимодействуют друг с другом без какого-либо действия. В противоположность, вторые подвижные тела 42, 42 на обеих сторонах направляются посредством криволинейных направляющих 47, 47 на обеих сторонах, при этом смещаясь внутрь посредством упругих элементов 46, 46, подобных цилиндрическим винтовым пружинам, в ножевых узлах 40, 40. Это вызывает направленные наружу отводные движения против смещающего усилия, тем самым исключая взаимодействие.
[0055] в результате, труба 10 отрезается с помощью вращающихся ножей 20, 20 на обеих сторонах. Порошок от резания, возникающий вследствие резания трубы 10, собирается в раме 30 в качестве ящика для сбора порошка от резания для препятствования разлетания порошка от резания на периферию. Отверстие 35, предусмотренное на задней пластине 33, предпочтительно, закрывается затворной пластиной, например, при этом, проход, обеспечивающий возможность прохождения трубы 10 максимального диаметра, остается незакрытым. В случае трубы малого диаметра, по-прежнему является предпочтительным, что элемент для закрывания зазора с помощью затворной пластины, например, предусмотрен на внешней периферийной части зажимной головки, подлежащей замене. Это предотвращает разлетание порошка от резания, образованного во время резания, в положение ближе по ходу. Это работает совместно с дверцей 37 открывания/закрывания в положении дальше по ходу для повышения эффективности сбора порошка от резания в раме 30, тем самым повышая эффективность мер для сбора порошка от резания.
[0056] Признаки трубоотрезного станка этого варианта осуществления с точки зрения конфигурации и работы будут описаны ниже.
[0057] Вращающиеся ножи 20, 20 на обеих сторонах совершают движения для отвода наружу в направлении оси x посредством использования прямолинейного приводного усилия в направлении оси y, а именно, посредством преобразования прямолинейного приводного усилия в усилие в направлении оси x. Таким образом, эти отводные движения не требуют новой мощности или нового приводного источника. Более конкретно, требуемая мощность по существу включает только вращательное приводное усилие для вращения вращающихся ножей 20, 20 на обеих сторонах и прямолинейное приводное усилие в направлении оси y. Таким образом, хотя вращающиеся ножи 20, 20 приводятся в движение в двух направлениях в плоскости x-y, механизм для приведения в движение упрощен.
[0058] Каждый из вращающихся ножей 20, 20 используется не для полного отрезания трубы 10, а для отрезания около половины трубы 10. Это уменьшает время для отрезания, по сравнению со временем для полного отрезания трубы 10. Более того, радиус каждого из вращающихся ножей 20, 20 уменьшается, и это также способствует упрощению конфигурации.
[0059] Вращающиеся ножи 20, 20 на обеих сторонах не совершают круговые движения вокруг трубы 10, а они приводятся в прямолинейное движение в направлении оси y, означая, что каждый из вращающихся ножей 20, 20 должен перемещаться в узком диапазоне. Это способствует уменьшению размера и уменьшению веса трубоотрезного станка во взаимосвязи с вышеприведенным упрощением приводного механизма.
[0060] Один из вращающихся ножей 20, 20 перемещается вниз из верхнего положения готовности в нижнее положение готовности, а другой вращающийся нож 20 перемещается вверх из нижнего положения готовности в верхнее положение готовности. Затем, в последующем отрезании, один из вращающихся ножей 20, 20 перемещается вверх из нижнего положения готовности в верхнее положение готовности, а другой вращающийся нож 20 перемещается вниз из верхнего положения готовности в нижнее положение готовности. Таким образом, становится необязательным для вращающихся ножей 20, 20 совершать движения для возврата в их начальные положения при подготовке к последующему отрезанию для обеспечения возможности уменьшения продолжительности этапа отрезания.
[0061] Вращающиеся ножи 20, 20 на обеих сторонах совершают направленные наружу отводные движения при прохождении мимо друг друга на оси x и вблизи оси x. В этом отношении, охват трубы 10 является максимальным на оси x, таким образом возникновение отделения вращающихся ножей 20, 20 на обеих сторонах от трубы 10 эффективно исключается. Это увеличивает диапазон диаметров труб, в котором вращающиеся ножи 20, 20 могут использоваться, делая возможным уменьшение вариативности диаметров, в конце концов, типов вращающихся ножей 20, 20. Более конкретно, один из признаков этого трубоотрезного станка заключается в обеспечении возможности отрезания труб 10, имеющих различные типы диаметров. Широкий совместно используемый диапазон может задаваться посредством оптимизации наружных диаметров вращающихся ножей 20, 20, форм направляющей поверхности криволинейных направляющих 47, 47, форм контактной поверхности верхней и нижней зажимных головок 61A, 61A переднего зажима 60A, форм контактной поверхности верхней и нижней зажимных головок 61B, 61B заднего зажима 60B и т.д.
[0062] Взаимодействие с другим узлом не должно возникать на передней стороне, если смотреть от плоскости резания для резания с помощью вращающихся ножей 20, 20. Это обеспечивает возможность фиксации трубы 10 с помощью переднего зажима 60A в положении рядом с плоскостью резания. В противоположность, существует риск взаимодействия с ножевыми узлами 40, 40, удерживающими вращающиеся ножи 20, 20, на задней стороне, если смотреть от плоскости резания. Следовательно, труба 10 не может легко фиксироваться с помощью заднего зажима 60B в положении рядом с плоскостью резания.
[0063] В этом отношении, в трубоотрезном станке этого варианта осуществления, вращающиеся ножи 20, 20 на обеих сторонах не совершают круговые движения вокруг трубы 10, а они приводятся в прямолинейное движение в направлении оси y и совершают направленные наружу отводные движения в направлении оси x. Это обеспечивает возможность образования линейного пространства, проходящего в направлении оси y между ножевыми узлами 40, 40 на обеих сторонах. При этом, направления зажимания посредством переднего зажима 60A и заднего зажима 60B представляют собой направление оси y, таким образом передний зажим 60A и задний зажим 60B выполнены с возможностью прохождения вдоль направления оси y. Это обеспечивает возможность расположения зажимного механизма 60, в частности расположения заднего зажима 60B между ножевыми узлами 40, 40 на обеих сторонах, таким образом труба 10 может фиксироваться как в положении спереди и рядом с плоскостью резания, так и в положении сзади и рядом с плоскостью резания.
[0064] Более конкретно, каждый из ножевых узлов 40, 40 на обеих сторонах приводится в линейное движение в таком же направлении (соответствующем направлению, в котором каждый из вращающихся ножей 20, 20 на обеих сторонах приводится в линейное движение), что и направление зажатия посредством заднего зажима 60B. Таким образом труба 10 может фиксироваться как в положении спереди и рядом с плоскостью резания, так и в положении сзади и рядом с плоскостью резания. В результате, труба 10 жестко фиксируется. Это повышает эффективность отрезания трубы 10 и продлевает срок службы вращающихся ножей 20, 20.
[0065] Кроме того, в трубоотрезном станке этого варианта осуществления, направление зажатия посредством переднего зажима 60A также представляет собой направлении оси y, которое является таким же, что и направление зажатия посредством заднего зажима 60B. Таким образом, передний зажим 60A и задний зажим 60B открываются и закрываются посредством верхнего и нижнего цилиндров 65, 65 и верхней и нижней перемещающихся вверх-вниз головок 66, 66, использующихся совместно между передней стороной и задней стороной. В результате, механизм для приведения в движение зажимного механизма 60 упрощается.
[0066] Передний зажим 60A прикреплен к одной из дверец 37, 37 открывания/закрывания (здесь, к правой дверце 37 открывания/закрывания, от смотрящего). Таким образом, когда дверцы 37, 37 открывания/закрывания изменяют закрытое состояние на открытое состояние, передний зажим 60A совершает круговое движение по направлению к передней стороне вокруг правого соединительного стержня 34 для открывания вращающихся ножей 20, 20 на передней стороне. Это делает возможным замену вращающихся ножей 20, 20 без необходимости частичного демонтажа рамы 30. В результате, замена вращающихся ножей 20, 20 облегчается.
[0067] В раме 30 на передней стороне, зажимной механизм 60 активируется для создания силы реакции, действующей на верхний и нижний горизонтальные элементы 31, 31 в направлениях отделения горизонтальных элементов 31, 31 друг от друга. В этом отношении, верхний и нижний горизонтальные элементы 31, 31 соединяются посредством соединительных валов 34, 34. Это обеспечивает требуемую прочность, при этом сохраняя легкий вес. Соединительные валы 34, 34 на обеих сторонах также работают в качестве шарнирных валов для дверец 37, 37 открывания/закрывания, и это также способствует уменьшению веса рамы 30.
[0068] Кроме того, вращающиеся приводы 21, 21 для вращающихся ножей 20, 20, описанных здесь, представляют собой гидравлические двигатели. Кроме того, что являются легковесными, гидравлические двигатели создают постоянные крутящие моменты. Таким образом, гидравлические двигатели могут приводить в движение вращающиеся ножи 20, 20 напрямую без задействования механизма замедления. Это достигает уменьшения размеров для увеличения пространства, образованного между ножевыми узлами 40, 40 на обеих сторонах, и облегчает размещение заднего зажима 60B. Уменьшение размеров и уменьшение веса станка также достигаются с этой точки зрения.
[0069] Кроме того, если вышеприведенные гидравлические двигатели приводят в движение вращающиеся ножи 20, 20 с постоянными частотами вращения, и механизм 50 приведения в прямолинейное движение управляет скоростями перемещения вверх и вниз вращающихся ножей 20, 20 переменным образом, срок службы режущих кромок вращающихся ножей 20, 20 может продлеваться.
[0070] Таким образом, даже если труба 10 имеет большой диаметр, труба 10 по-прежнему может эффективно отрезается за короткий период времени также посредством трубоотрезного станка третьего варианта осуществления. Кроме того, простая конфигурация достигает компактности и легковесности, и превосходной экономической эффективности и превосходной долговечности.
[0071] В вариантах осуществления, ось x в плоскости x-y представляет собой горизонтальную линию, а ось y в плоскости x-y представляет собой вертикальную линию, перпендикулярную относительно горизонтальной линии. Однако, это не исключительный случай. Ось y может представлять собой горизонтальную линию, а ось x может представлять собой вертикальную линию, перпендикулярную относительно горизонтальной линии. Направления двух осей означают два направления под прямым углом к друг друга в плоскости x-y.
[0072] В вариантах осуществления, конфигурация приводного механизма преобразования направления включает в себя комбинацию упругого элемента 46, предусмотренного в качестве смещающего нож механизма в ножевом узле 40, и криволинейной направляющей 47, предусмотренной в качестве направляющего механизма на поверхности задней пластины 23 на передней стороне. Однако, приводной механизм преобразования направления не ограничен на комбинации смещающего нож механизма и направляющего механизма, а может быть выполнен с использованием направляющего рельса.
[0073] Касательно приводного механизма преобразования направления, во втором варианте осуществления, показанном на фиг.2, упругий элемент 46 в качестве смещающего нож механизма показан предусмотренным также для вращающегося ножа 20, принадлежащего вращающимся ножам 20, 20 в паре и не совершающим направленное наружу отделяющее движение. Однако, этот смещающий нож механизм может быть опущен вместе с направляющим механизмом, и этот вращающийся нож 20 может определенно фиксироваться в направлении оси x.
[0074] Если конфигурация приводного механизма преобразования направления включает в себя комбинацию смещающего нож механизма и направляющего механизма, смещающий нож механизм вышеприведенных вариантов осуществления представляет собой упругий элемент 46, который упруго удерживает по меньшей мере один из вращающихся ножей 20, 20 в паре в предельном положении внутреннего перемещения. В качестве альтернативы, смещающий нож механизм может представлять собой механизм давления, такой как гидроцилиндр или пневмоцилиндр, использующий давление текучей среды. Более конкретно, смещающее усилие, прикладываемое для удерживания по меньшей мере одного из вращающихся ножей 20, 20 в паре в предельном положении внутреннего перемещения, может представлять собой давление пружины или давление текучей среды, такое как гидравлическое давление.
[0075] Если смещающий нож механизм представляет собой механизм давления, использующий давление текучей среды, давление текучей среды прикладывается, чтобы удерживать по меньшей мере один из вращающихся ножей 20, 20 в паре в предельном положении внутреннего перемещения при заданном давлении. Когда вращающиеся ножи 20, 20 на обеих сторонах проходят мимо друг друга на оси x и вблизи оси x, по меньшей мере один из вращающихся ножей 20, 20 в паре отжимается наружу посредством направляющего механизма под действием давления, превышающего заданное давление, для совершения отводного движения. В результате, как и в случае использования упругого элемента 46, взаимодействие между вращающимися ножами 20, 20 в паре исключается. Предпочтительно относительно случая, использующего упругий элемент 46, механизм давления, использующий давление текучей среды, может легко увеличивать прижимающее усилие (заданное давление), тем самым способствуя уменьшению размеров смещающего нож механизма. Это прижимающее усилие (заданное давление) является легко регулируемым. Таким образом, посредством прикладывания прижимающего усилия, большего, чем заданное значение, во время начального резания и уменьшения прижимающего усилия до заданного значения непосредственно после резания, например, становится возможным совершать движение резания более стабильно.
[0076] Кроме того, если диаметр трубы 10 увеличивается, криволинейная направляющая 47 в качестве направляющего механизма требует замены. Это увеличивает расстояние, на которое вращающийся нож 20 перемещается в направлении оси x, таким образом упругий элемент 46 также может становиться целевым элементом замены. Если механизм давления, использующий давление текучей среды, такой как гидроцилиндр, используется вместо упругого элемента 46 для получения смещающего усилия, могут достигаться варьируемый рабочий ход и варьируемое смещающее усилие. Это работает, предпочтительно, для резания группы продуктов с широким диапазоном диаметров труб 10, делая возможным расширение области применения отрезного станка.
Перечень ссылочных позиций
[0077] 10 Труба
20 Вращающийся нож
21 Вращающийся привод
30 Рама
31 Горизонтальный элемент
32 Перпендикулярный элемент
33 Задняя пластина
34 Соединительный стержень
35 Отверстие
36 Блокировочная пластина
37 дверца открывания/закрывания
40 Ножевой узел
41 Первое подвижное тело
42 Второе подвижное тело
43, 44 Линейная направляющая
45 Стержень
46 Упругий элемент (смещающий нож механизм)
47 Криволинейная направляющая (направляющий механизм)
48 Направляющая поверхность
49 Контактный элемент
50 Механизм приведения в прямолинейное движение
51 Винтовой стержень
52 Колоколообразная пружина
53 Двигатель
54 Соединительный вал
60 Зажимной механизм
60A Передний зажим
60B Задний зажим
61A, 61B Зажимная головка
62A, 62B Поддерживающий элемент
63A, 63B Направляющий элемент
64A Пружина
65 Цилиндр
66 Перемещающаяся верх-вниз головка
Реферат
Изобретение относится к трубоотрезному станку. Трубоотрезной станок содержит вращающиеся ножи в паре, расположенные в плоскости под прямым углом к осевой линии трубы, подлежащей резанию, заданной в качестве плоскости x-y, и центром трубы, заданным в качестве начала координат. Вращающиеся ножи расположены обращенными друг к другу на обеих сторонах оси y таким образом, что режущие кромки вращающихся ножей накладываются друг на друга в направлении оси x. Станок содержит механизм приведения в прямолинейное движение, который приводит вращающиеся ножи в паре в прямолинейное движение в противоположных направлениях относительно направления оси y таким образом, чтобы заставлять вращающиеся ножи в паре проходить мимо друг друга на оси x и вблизи оси x. Также он содержит приводной механизм преобразования направления и приводной механизм преобразования направления, которые изменяют часть прямолинейного приводного усилия в направлении оси y на усилие в направлении оси x и перемещают вращающиеся ножи в паре наружу для отдаления от оси y для исключения взаимодействия между режущими кромками, когда вращающиеся ножи в паре проходят мимо друг друга на оси x и вблизи оси x. В результате обеспечивается эффективное отрезание трубы, повышение долговечности с помощью простой, компактной и легковесной конфигурации. 10 з.п. ф-лы, 6 ил.
Комментарии