Станок для резки под углом с индикацией угла установки режущего элемента (варианты) - RU2344905C2
Код документа: RU2344905C2
Чертежи















Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к станку для резки под углом, обеспечивающему регулирование угла наклона режущего диска относительно основания станка, а также угла наклона режущего диска относительно контактной поверхности ограничителя, закрепленного на основании.
Уровень техники
Известные станки для резки под углом имеют основание, служащее опорой для обрабатываемой детали, режущий узел, несущий вращающийся пильный диск, и опорный узел, служащий опорой для поворота пильного диска вокруг оси, по существу параллельной оси пильного диска. Опорный узел можно наклонять относительно основания, изменяя угол между боковой гранью пильного диска и верхней поверхностью основания.
Далее, если станок для резки под углом вместе с основанием оборудован поворотным столом для закрепления обрабатываемой детали, то поворотный стол соединен с опорным узлом таким образом, что можно регулировать угол наклона боковой грани пильного диска относительно верхней поверхности основания.
Далее, если можно регулировать угол наклона боковой грани пильного диска относительно контактной поверхности ограничителя, закрепленного на основании, то суппорт поворота режущего узла соединен с поворотным столом, предусмотренным на поверхности основания, таким образом, что суппорт может поворачиваться вокруг оси вращения поворотного стола.
Пользователь станка может резать деталь, удерживаемую на верхней поверхности основания, в наклонном направлении, регулируя угол боковой грани пильного диска относительно верхней поверхности основания. Пользователь может также резать деталь с наклоном относительно боковой поверхности детали, противолежащей контактной поверхности ограничителя, в вертикальном направлении, регулируя угол наклона боковой грани пильного диска относительно контактной поверхности ограничителя. Пользователь выполняет эти регулировки посредством градуированных шкал, предусмотренных на опорном узле и основании или поворотном столе для указания градусов угла наклона и угла поворота. Поэтому пользователь станка такого типа может узнать угол наклона и угол поворота, глядя на градуированные шкалы. Однако быстро определить углы наклона и поворота не просто. Далее, вследствие небольшого места, количество углов, которое может быть нанесено на шкалы, ограничено. Поэтому пользователь не может быстро определить текущие значения углов наклона и поворота, если эти углы не нанесены на шкалы, что ведет к снижению производительности труда.
В публикации японской заявки №2000-254817, находящейся на стадии экспертизы, раскрыт станок для резки под углом, имеющий средства для определения угла наклона вращающегося торца пильного диска относительно основания и дисплей для отображения определенного этими средствами угла.
Станок для резки под углом, описанный в публикации японской заявки №2000-254817, имеет измерительный вал, соединенный с опорным валом вращающегося пильного диска, и определяет угол поворота измерительного вала. Таким образом, станок определяет угол поворота, вычисляя угол поворота измерительного вала, например, с помощью преобразователя угол-код, и выводит полученное значение угла поворота на дисплей.
Вышеописанный станок определяет угол наклона пильного диска относительно поверхности основания и отображает полученное значение угла на дисплее, немедленно сообщая пользователю текущее значение угла наклона. Однако выводимый на дисплей угол наклона всегда определяется на основе начального исходного положения. Угол поворота поворотного стола относительно основания также всегда определяется и отображается на дисплее на основе начального исходного положения.
Обычно станок для резки под углом сконструирован таким образом, что узел основания или поворотный стол механически сцепляются с опорным узлом для фиксации пильного диска. Поэтому стороны диска могут образовывать прямые углы с поверхностью основания (наиболее часто применяемое положение) или устанавливаться под углом 45° к поверхности основания (второе наиболее часто применяемое положение).
Далее, станок для резки под углом сконструирован таким образом, что основание и поворотный стол механически сцепляются между собой для фиксации повернутого положения поворотного стола относительно основания. Поэтому боковые грани пильного диска могут образовывать прямые углы с контактной поверхностью ограничителя (наиболее часто применяемое положение) или образовывать с контактной поверхностью ограничителя углы 15°, 30°, 45° или 60° (следующие наиболее часто применяемые положения).
Далее, даже когда для индикации измеренных углов предусмотрен дисплей, он может использоваться не всегда из-за неисправностей, различных эксплуатационных условий или предпочтений пользователя. Поэтому градуированная шкала так же часто предусматривается на опорном узле или основании для индикации обычно применяемых углов наклона и углов поворота, как и дисплей.
В станке для резки под углом вышеописанной конструкции угол наклона и угол поворота всегда измеряются относительно предварительно заданной опорной точки. Поэтому угол, отображаемый на дисплее, часто не совпадает с углом, определяемым механическим зацеплением в предварительно заданном положении, или с углом, показываемым на градуированной шкале, вследствие ошибок в определении или неточностей размеров станка.
Например, в станке с максимальным диапазоном отклонения 45° дисплей может показывать 44° или 46°, хотя пользователь наклонил опорный узел на 45°. Далее, если основание и поворотный стол сцеплены под заранее заданными углами 15°, 30°, 45° или 60°, дисплей может показывать значения, отличные от этих заданных значений. В этом случае пользователю предоставляются как бы на выбор различные значения углов, что создает путаницу, которая может привести к снижению производительности труда.
Далее, даже если опорный узел механически сцеплен с основанием или поворотным столом в предварительно заданном положении, вибрации или другие внешние силы могут привести к нежелательному изменению угла, отображаемого на дисплее.
Если углы наклона и поворота измеряются в широком диапазоне, ошибки в определении угла могут быть большими, поскольку углы всегда отсчитываются от заранее заданного исходного положения. Поэтому вывести на дисплей точные значения углов наклона и поворота затруднительно.
Раскрытие изобретения
С учетом вышеизложенного задача настоящего изобретения состоит в создании станка для резки под углом, который способен предоставить пользователю надлежащую информацию об углах.
Другая задача настоящего изобретения состоит в создании станка для резки под углом, позволяющего уменьшить ошибки в определении углов во время их регулировки.
В первом аспекте изобретение предлагает станок для резки изделия под углом, содержащий основание; подвижный элемент, установленный с опорой на основание и с возможностью перемещения относительно него; режущий элемент, перемещаемый совместно с подвижным элементом; детектор для определения по меньшей мере одного из угла поворота и угла наклона между режущим элементом и изделием, выполненный с возможностью выдачи сигнала, указывающего на по меньшей мере один определенный им угол; и цифровой контроллер, снабженный интерфейсом, выполненным с возможностью приема указанного сигнала.
Во втором аспекте изобретение предлагает станок для резки изделия под углом, содержащий основание, подвижный элемент, установленный с опорой на основание и с возможностью перемещения относительно него; режущий элемент, перемещаемый совместно с подвижным элементом; цифровой дисплей для отображения по меньшей мере одного из угла поворота и угла наклона режущего элемента относительно поддерживаемого основанием изделия; и цифровой контроллер, снабженный интерфейсом, выполненный с возможностью управления указанным дисплеем через указанный интерфейс.
В третьем аспекте изобретение предлагает станок для резки изделия под углом, содержащий основание, первый элемент, установленный с опорой на основание и с возможностью перемещения относительно него; второй элемент, отходящий от основания и перемещаемый относительно него; режущий элемент, перемещаемый совместно с первым элементом и поддерживаемый первым элементом; первый детектор и второй детектор для определения, соответственно, угла поворота и угла наклона между режущим элементом и изделием, выполненные с возможностью выдачи первого и второго сигналов, указывающих на определенные ими угол поворота и угол наклона; и цифровой контроллер, снабженный интерфейсом, выполненным с возможностью приема первого и второго сигналов, для выдачи информации о положении первого и второго элементов относительно основания.
В четвертом аспекте изобретение предлагает станок для резки изделия под углом, содержащий основание, подвижный элемент, установленный с опорой на основание и с возможностью перемещения относительно него; режущий элемент, перемещаемый совместно с подвижным элементом; детектор, выполненный с возможностью выдачи сигнала, указывающего на по меньшей мере один из угла поворота и угла наклона; память, содержащую данные о соотношении между сигналом и по меньшей мере одним из угла поворота и угла наклона; и цифровой контроллер, выполненный с возможностью получения указанного сигнала и доступа к памяти для вывода информации о величине угла.
Краткое описание чертежей
Вышеперечисленные и другие задачи, особенности и преимущества изобретения станут более очевидными из следующего описания предпочтительных реализации, сопровождаемого чертежами, где
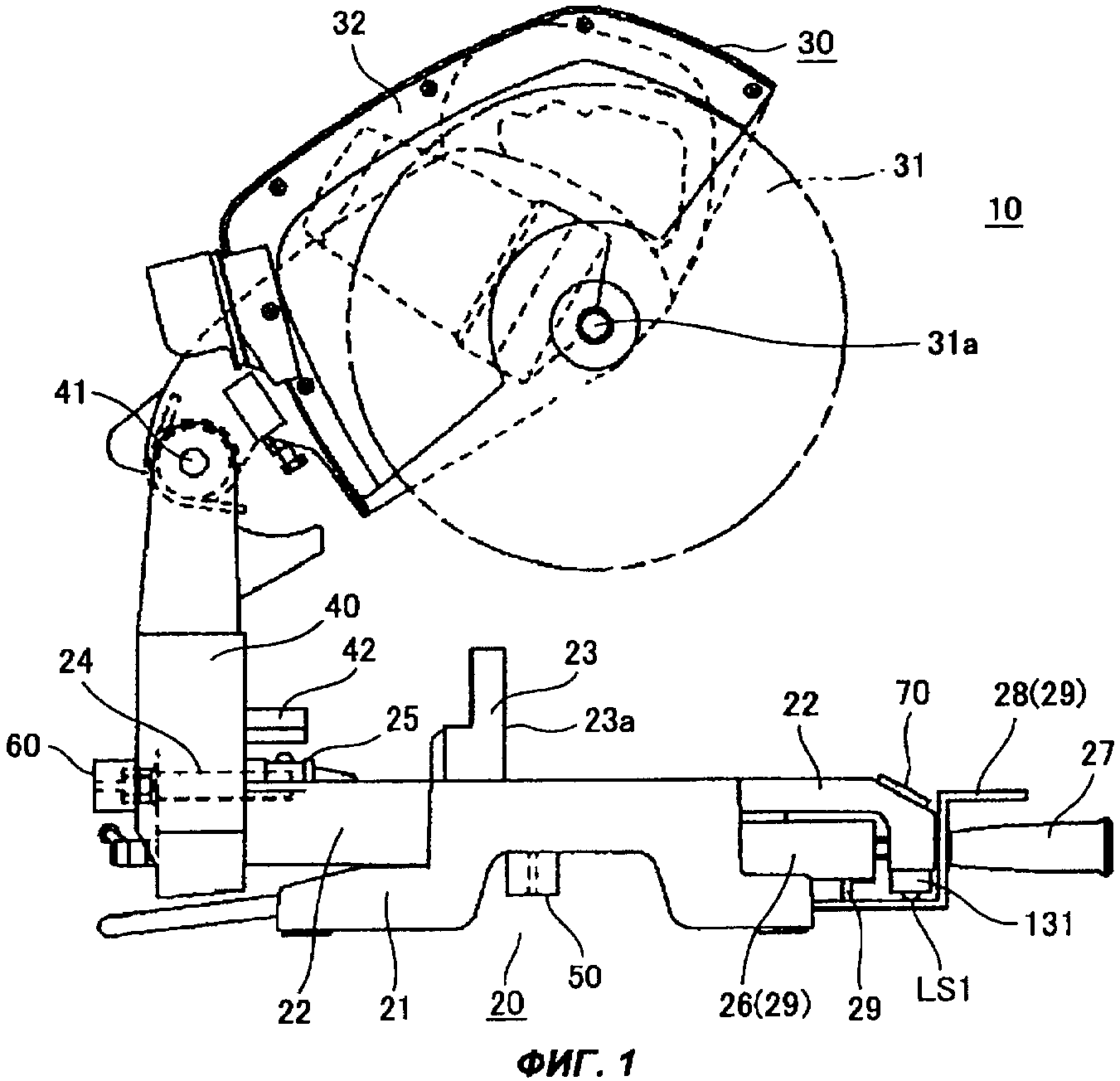
фиг.1 изображает вид сбоку станка для резки под углом в соответствии с первым вариантом изобретения;
фиг.2 изображает электрическую схему, представляющую контроллер для дисплея, используемый в предпочтительном варианте реализации станка;
фиг.3 изображает увеличенный боковой вид, показывающий первое положение наклона станка по фиг.1;
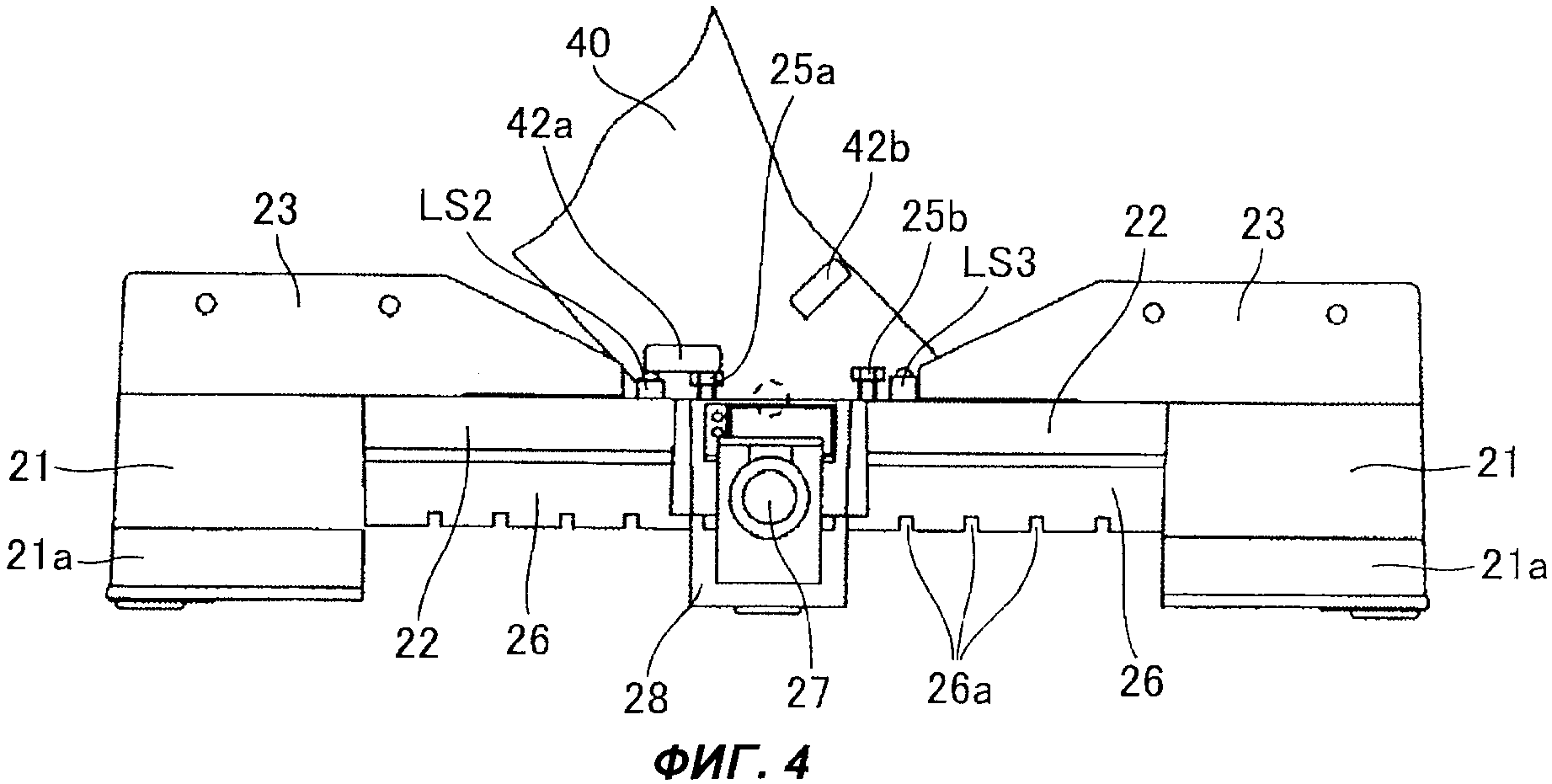
фиг.4 изображает увеличенный боковой вид справа, показывающий второе положение наклона станка по фиг.1;
фиг.5 изображает увеличенное поперечное сечение, показывающее первое положение поворота станка по фиг.1;
фиг.6 изображает увеличенное поперечное сечение, показывающее второе положение поворота станка по фиг.1;
фиг.7, 8 и 9 представляют блок-схемы, иллюстрирующие операции управления дисплеем по фиг.2;
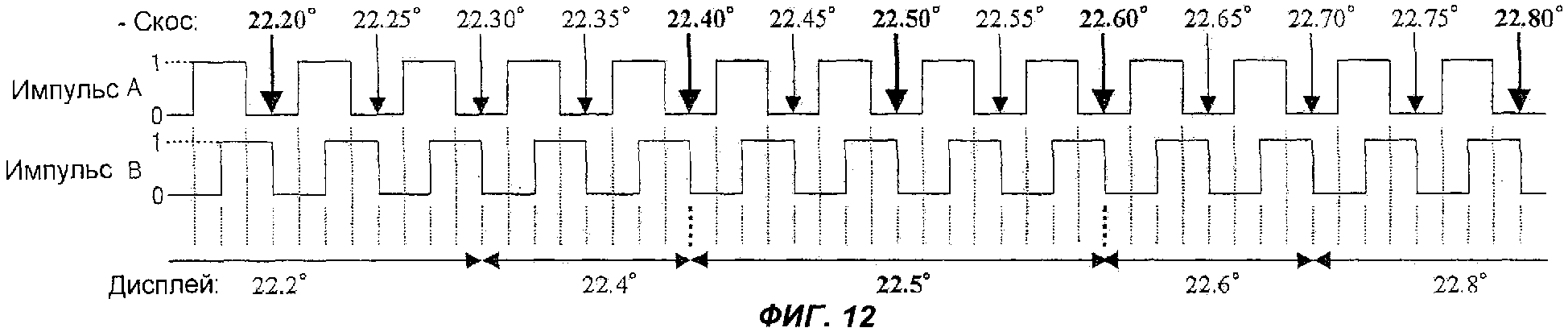
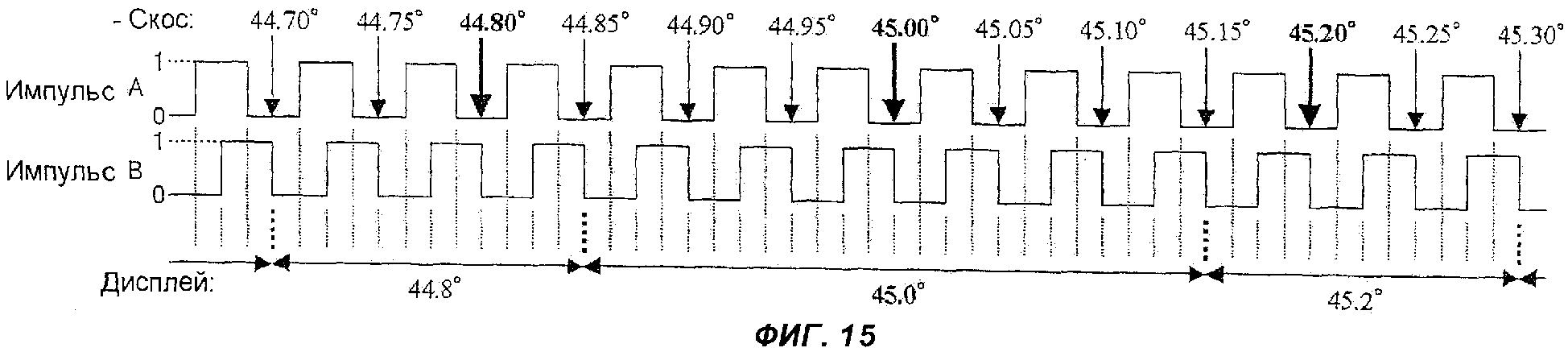
фиг.10-15 представляют диаграммы, изображающие выходные импульсы, генерируемые преобразователем угол-код, используемым в станке по фиг.1;
фиг.16 представляет вид сбоку станка в соответствии со вторым аспектом изобретения;
фиг.17 представляет вид снизу станка по фиг.16;
фиг.18 представляет частично увеличенный вид снизу станка по фиг.16;
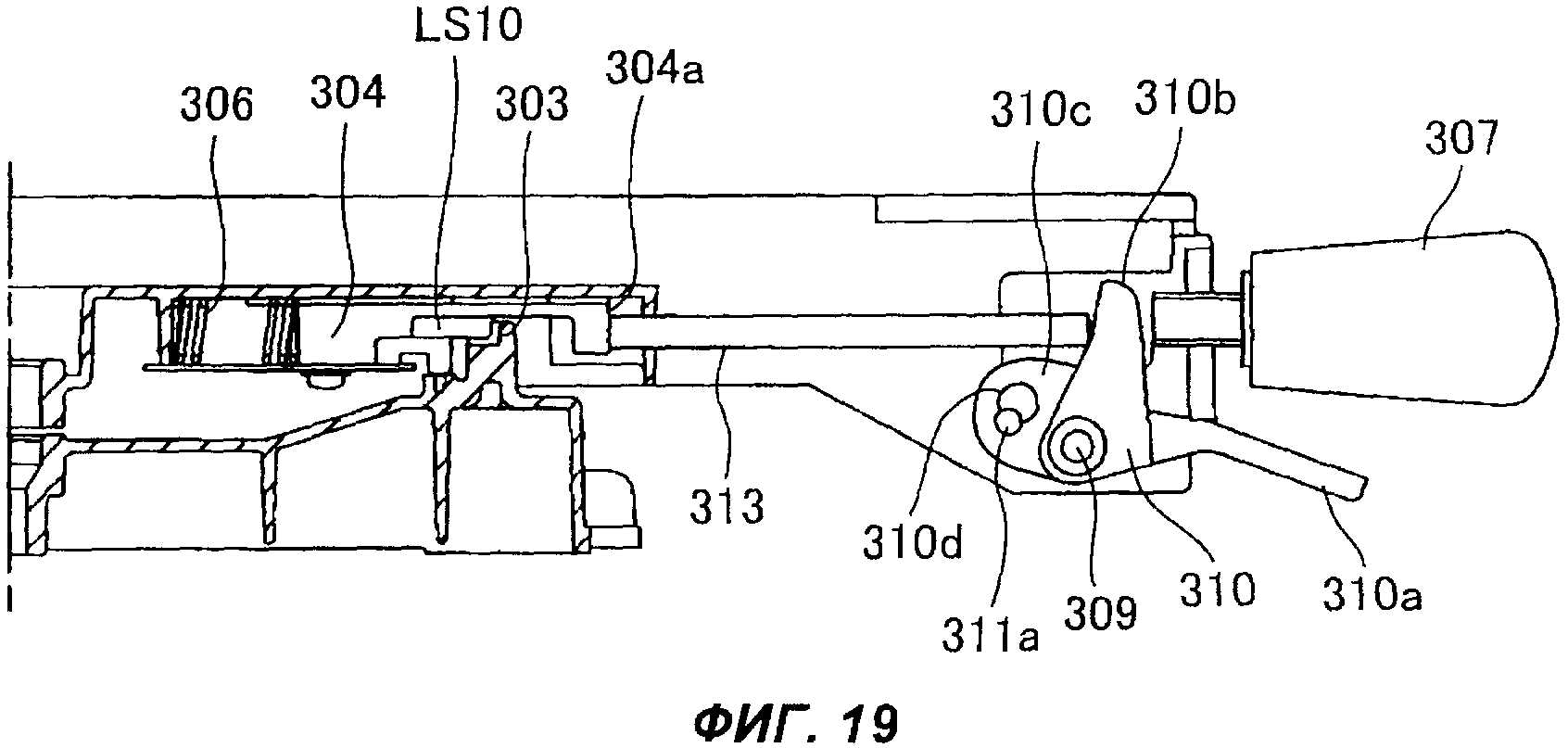
фиг.19 представляет вид сбоку станка по фиг.16, где поворотный стол сцеплен с основанием;
фиг.20 представляет увеличенный вид станка по фиг.16; и
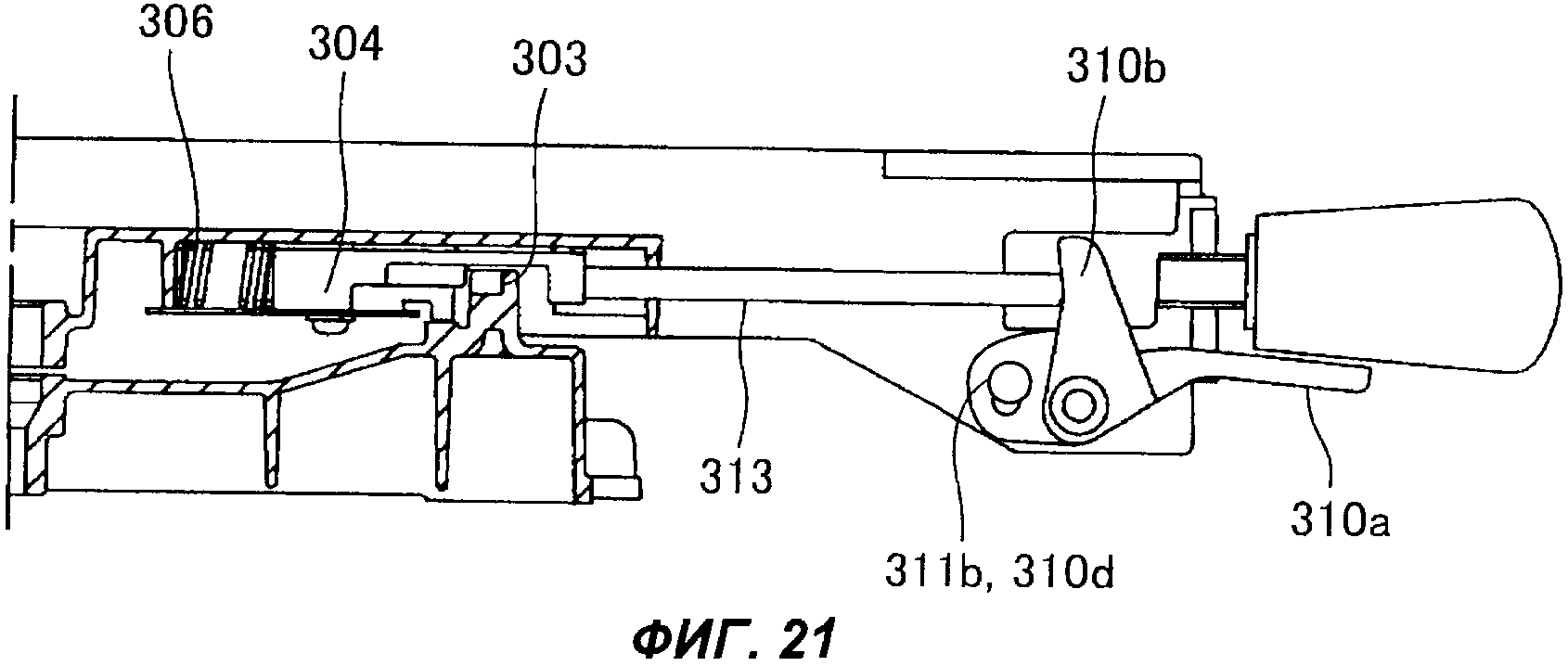
фиг.21 представляет вид сбоку станка по фиг.16, где поворотный стол перемещается относительно основания.
Осуществление изобретения
Ниже со ссылками на сопроводительные чертежи описывается станок для резки под углом в соответствии с предпочтительным вариантом изобретения. На фиг.1 изображен станок 10 в соответствии с предпочтительным вариантом изобретения.
Как видно на фиг.1, станок 10 содержит узел основания 20, который установлен на плоской поверхности и предназначен для размещения на нем обрабатываемой деревянной детали; режущий узел 30 для резки обрабатываемой детали; и опорный узел 40, поддерживающий режущий узел 30 таким образом, что режущий узел можно перемещать из верхнего положения в нижнее для резания обрабатываемой детали. Опорный узел 40 можно также наклонять относительно поверхности узла основания 20.
Узел основания 20 состоит из основания 21, расположенного непосредственно на плоской поверхности, поворотного стола 22, который может поворачиваться, образуя угол с основанием 21, и ограничителя 23, имеющего контактную поверхность 23а, к которой прилегает боковая грань обрабатываемой детали, лежащей на поверхности основания 21, для удержания обрабатываемой детали на месте. Поворотный стол 22 может поворачиваться вокруг оси, перпендикулярной к поверхности основания 21, и вокруг оси, лежащей в горизонтальной плоскости, включающей поверхность основания 21. Между поворотным столом 22 и основанием 21 имеется потенциометр 50 для определения угла поворота поворотного стола 22 относительно основания 21. В дальнейшем изложении термин «передняя сторона станка» относится к направлению, к которому обращена контактная поверхность 23а ограничителя 23; термин «нижняя сторона станка» относится к направлению, обращенному к плоской поверхности, на которой установлено основание, а «левая» и «правая» стороны - это стороны, между которыми установлен ограничитель 23.
Режущий узел 30 состоит из пильного диска 31 для резки обрабатываемой детали, вращающегося вокруг оси 31а; и кронштейна 32, в котором установлен пильный диск 31, вращающийся вокруг оси 31а.
Опорный узел 40 подвижно соединен с поворотным столом 22. В поворотный стол 22 встроена ось вращения 24. Один конец опорного узла 40 шарнирно соединен с осью вращения 24, чтобы вращением опорного узла 40 вокруг оси вращения 24 обеспечить его наклон относительно поворотного стола 22. На другом конце опорного узла 40 имеется шарнирная ось 41, параллельная оси вращения 31а пильного диска 31. Режущий узел 30 связан с опорным узлом 40 через ось вращения 24 таким образом, что пильный диск 31 может поворачиваться вокруг оси 41. На поворотном столе 22 и опорном узле 40 установлен потенциометр 60 для измерения угла наклона опорного узла 40 относительно поворотного стола 22.
Возле одного конца опорного узла 40 расположена направляющая наклона 42. С другой стороны вблизи опорного узла 40 на поворотном столе 22 имеется болт 25. В этой реализации направляющая наклона 42 и болт 25 возле опорного узла 40 предназначены для ограничения пределов наклона поворотной оси 302 относительно поворотного стола 22. Когда опорный узел 40 наклоняется относительно поворотного стола 22, направляющая наклона 42 соприкасается с головкой болта 25. Болт 25 и направляющая наклона 42 не дают опорному узлу 40 выйти за пределы разрешенного диапазона углов наклона.
Ниже подробно описывается узел основания 20. В состав узла основания входят также опорный узел поворота 26, ручка 27 и запорный рычаг 28. Опорный узел поворота 26 предусмотрен в основании 21; на него опирается поворотный стол 22, так что поворотный стол 22 может поворачиваться относительно основания 21. На нижней стороне опорного узла поворота 26 имеется большое количество вырезов 26а. Вырезы 26а расположены на заданных интервалах, например, через 7,5°.
В этой реализации вырезы 26а следуют через 7,5°, т.е. 0°, 7,5°, 15°, 22,5°, 30°, 37,5° и 45°. Вырезы снабжены соответствующими метками, обозначающими углы, начиная от 0°, т.е. 0°, 7,5°, 15°, 22,5°, 30°, 37,5° и 45° соответственно.
Однако вырез 26а не всегда расположен в точном соответствии с отмеченным значением угла, отсчитанным от 0°, вследствие ошибок изготовления. Иными словами, даже если вырез 26а помечен значком 30°, он не всегда расположен точно в 30° от 0°, например, вследствие ошибок и неточностей изготовления. В соответствии с этим, даже если вырез 26а, помеченный значком 30°, находится в положении, отличном от точных 30°, например, в положении 29,5° или 30,5°, этот вырез с пометкой 30° считается расположенным в 30° от 0°, поскольку он имеет метку 30°. Это же относится к другим вырезам с помеченными углами. Вышеуказанное угловое положение выреза отнесено к предварительно заданному номинальному положению в настоящем изобретении.
Ручка 27 используется для вращения поворотного стола 22 относительно основания 21. Запорный рычаг 28 расположен на поворотном столе 22 и содержит механизм сцепления 29 для сцепления с одним из вырезов 26а (см. фиг.3). Под поворотным столом 22 и над запорным рычагом 28 находится конечный выключатель LS1. При нажатии вниз запорный рычаг 28 выводит механизм сцепления 29 из выреза 26а, позволяя поворачивать поворотный стол 22. Конечный выключатель LS1 включается, когда запорный рычаг 28 сцеплен с одним из вырезов 26а. Конечный выключатель LS1 выключается, когда запорный рычаг 28 не сцеплен ни с одним из вырезов 26а.
Дисплей 70 расположен на лицевой поверхности (с правой стороны на фиг.1) поворотного стола 22 для отображения угла поворота поворотного стола 22 относительно исходного положения и угла наклона опорного узла 40 относительно поверхности узла основания 20. В данной реализации исходная позиция определяется как начальная точка для измерения угла наклона и/или поворота подвижного элемента, такого как поворотный стол 22, и опорного узла 40 относительно основания 21. Например, если подвижным элементом является поворотный стол 22, исходным положением обычно является положение, при котором боковые грани пильного диска 31 расположены перпендикулярно к контактной поверхности 23а ограничителя 23. Если подвижным элементом является опорный узел 40, то исходным положением является вертикальное направление, параллельное нормали к поверхности поворотного стола.
Далее подробно описывается дисплей 70 со ссылками на фиг.2.
На фиг.2 изображен контроллер 100 для управления дисплеем 70. Контроллер 100 состоит из батареи 110, цепи постоянного тока 120, датчика положения поворота 130, датчика положения наклона 140, узла сброса 150, микрокомпьютера 160, памяти 170, датчика угла наклона 180 и датчика угла поворота 190.
В цепь постоянного тока 120 входят регулятор 121 с тремя выводами, переключающие элементы S1 и S2, ИС сброса 122, ключ S3, диоды D1 и D2, резисторы R1-R3, и конденсаторы С1 и С2. Когда переключающий элемент S1 включен, на выходе регулятора 121 с тремя выводами появляется постоянное напряжение Vcc от батареи 110.
Состояние ВКЛ/ОТКЛ переключающего элемента S1 изменяется в соответствии с состоянием ВКЛ/ОТКЛ ключа S3 и переключающего элемента S2. Иными словами, если при отключенном элементе S1 пользователь включает ключ S3, и выходное напряжение батареи 110 достигает заданного значения, переключающий элемент S1 включается посредством ИС сброса 122 и переключающего элемента S2. Соответственно, от сети постоянного тока 120 подается напряжение на микрокомпьютер 160. Одновременно микрокомпьютер 160 выдает сигнал для продолжения электропитания.
С другой стороны, если ключ S3 включается, когда переключающий элемент S1 включен, микрокомпьютер 160 реагирует на это выдачей сигнала на отключение переключающего элемента S1 с прекращением подачи питания на микрокомпьютер 160.
Датчик положения поворота 130 состоит из резистора R4 и конечного выключателя LS1. Датчик положения поворота 130 обнаруживает, входит ли поворотный стол 22 в один из вырезов 26а. Иными словами, датчик положения поворота 130 обнаруживает, что поворотный стол сцеплен с одним из вырезов 26а. В данной реализации вырезы 26а удалены от исходного положения шагами по 7,5°. Как правило, начальное исходное положение - это положение, при котором боковые грани пильного диска 31 расположены под прямым углом относительно контактной поверхности 23а ограничителя 23.
Датчик положения наклона 140 состоит из резисторов R5 и R6 и конечных выключателей LS2 и LS3. Датчик положения наклона 140 определяет, находятся ли боковые грани пильного диска 31 под предварительно заданным углом к поверхности основания 21. Иными словами, датчик положения наклона 140 определяет, установлены ли направляющая наклона 42 и болты 25 в положение, соответствующее максимальному углу наклона.
Узел сброса 150 состоит из резисторов R7 и R8 и конечных выключателей LS4 и LS5. Узел сброса 150 предназначен для сброса отображаемых на дисплее углов наклона и/или поворота на ноль. С помощью узла сброса пользователь может выбрать любое угловое положение в качестве исходного для измерения углов в желаемом положении. Поэтому дисплей 70 отображает значение угла для любого отклонения от исходного положения, выбранного пользователем.
Микрокомпьютер 160 состоит из ЦПУ 161, ПЗУ 162, ОЗУ 163, таймера 164, АЦП 165, порта ввода 166а, портов вывода 166b и 166с, входного порта 167 сигнала сброса и портов памяти 168а и 168b. Микрокомпьютер 160 использует таймер 164 для получения через фиксированные промежутки времени преобразованных в АЦП 165 сигналов от датчика угла наклона 180 и датчика угла поворота 190; для получения сигналов от датчика положения поворота 130, датчика положения наклона 140 и узла сброса 150 через порт памяти 168а; и для получения сигнала из памяти 170 через порт памяти 168b. Микрокомпьютер 160 вычисляет углы наклона и поворота на основании сигналов, получаемых отдатчиков 130, 140, 150, 180, и 190, и выводит вычисленные значения углов на дисплей 70 через порт вывода 166 с.Микрокомпьютер 160 также выдает сигнал на отключение переключающего элемента S1 при получении выходного сигнала от ИС сброса 122 для управления подачей питания от батареи 110. Микрокомпьютер 160 также передает вычисленные значения углов поворота и наклона в память 170.
В качестве памяти 170 может использоваться, например, запоминающее устройство ЭСППЗУ, предназначенное для хранения значений угла наклона и угла поворота, полученных из микрокомпьютера 160, и соответствующих выходных значений датчиков углов наклона и поворота 180 и 190. Помимо этого в памяти 170 хранится таблица, включающая соотношения между каждым из вырезов 26а и соответствующими значениями сигналов отдатчиков 180 и 190 углов наклона и поворота. Память обновляет таблицу в соответствии с выходными сигналами микрокомпьютера 160.
ИС сброса 123 расположена между выходным выводом регулятора 121 с тремя выводами и микрокомпьютером 160 для передачи на микрокомпьютер 160 сигнала сброса низкого уровня через входной порт 167 сигнала сброса в зависимости от выходного напряжения регулятора 121 с тремя выводами для перезагрузки микрокомпьютера 160.
Датчик угла наклона 180 состоит из резистора R9 и потенциометра 60. Потенциометр 60 предназначен для определения отклонения опорного узла 40 от вертикального направления, которое в основном перпендикулярно поверхности поворотного стола 22.
Датчик угла поворота 190 состоит из резистора R10 и потенциометра 50. Потенциометр 50 предназначен для определения значения поворота поворотного стола 22 относительно основания 21. В данной реализации потенциометр 50 определяет значение поворота поворотного стола 22 из исходного положения.
Поскольку значения сопротивления потенциометра 60 и потенциометра 50 изменяются линейно по мере приращений углов, выходные напряжения потенциометров 60 и 50 изменяются по мере приращений углов также линейно.
Далее, если опорный узел 40 установлен в одном из предварительно заданных углов наклона или углов поворота, то память 170 сохраняет таблицу соответствий между напряжениями на выходах потенциометров 60 и 50 и каждым из предварительно заданных углов наклона и углов поворота. В данной реализации вырезы 26а следуют друг за другом на основании 21 с интервалом 7,5°. Каждый из вырезов 26а соответствует одному из предварительно заданных углов поворота. Предварительно заданные углы наклона 0°, 15°, 30° и 45° определяются опорным блоком 40 и нормалью к поверхности поворотного стола 22.
В качестве дисплея 70 может использоваться, например, жидкокристаллический дисплей; он предназначен для индикации углов наклона и углов поворота, вычисленных микрокомпьютером 160.
Далее описываются состояния наклона станка 10 со ссылками на фиг.3 и 4.
На фиг.3 опорный узел 40 расположен под прямым углом к поверхности основания 21, а боковые грани пильного диска 31 также ориентированы под прямым углом к поверхности основания 21. В данной реализации указанная ориентация опорного узла 40 соответствует исходной позиции. На фиг.4 опорный узел 40 отклонен на максимальный угол от исходного положения, так что боковые грани пильного диска расположены под углом 45° к нормали к поверхности основания 21.
Как видно на фиг.3 и 4, ножки 21а прикреплены к дну основания 21. В опорном узле поворота 26 предусмотрены вырезы 26а в количестве, соответствующем количеству предварительно заданных углов. Механизм сцепления 29 введен в один из вырезов 26а. Болты 25 препятствуют отклонению боковых граней пильного диска 31 от исходного положения (вертикального в данном варианте) на угол, превышающий 45°. В частности, болты 25 могут соприкасаться с направляющими наклона 42 опорного узла 40 для ограничения наклона опорного блока 40. Как показано на фиг.3, направляющая наклона 42 и болт 25b с одной стороны соприкасаются друг с другом, когда боковые грани пильного диска 31 ориентированы под прямым углом к вертикальному исходному направлению Z. Как показано на фиг.4, направляющая наклона 42 и болт 25а с другой стороны соприкасаются друг с другом, когда опорный узел 40 отклонен на максимальный угол от вертикального исходного положения Z, и боковые грани пильного диска 31 наклонены под углом 45° к поверхности поворотного стола 22.
Как показано на фиг.3 и 4, для обнаружения положения максимального наклона на поворотном столе 22 вблизи болтов 25 расположены конечные выключатели LS2 и LS3, слегка выступающие над головками болтов 25. Конечный выключатель LS2 включается направляющей наклона 42а, когда направляющая наклона 42а соприкасается с соответствующим болтом 25а, как показано на фиг.4. Конечный выключатель LS3 включается направляющей наклона 42b, когда направляющая наклона 42b соприкасается с соответствующим болтом 25b, как показано на фиг.3. В частности, конечный выключатель LS3 включен, когда опорный узел находится в вертикальном исходном положении, показанном на фиг.3. Конечный выключатель LS2 включен, когда опорный узел 40 отклонен на максимальный угол 45°, как показано на фиг.4.
Далее описываются состояния поворота поворотного стола 22 станка 10 в данной реализации со ссылками на фиг.5 и 6.
На фиг.5 показан механизм сцепления 29 запорного рычага 28, сцепленный с одним из вырезов 26а в основании 21. На фиг.6 показан механизм сцепления 29, выведенный из зацепления с вырезом 26а при нажатии на запорный рычаг 28 вниз.
Как показано на фиг.5 и 6, на нижней стороне поворотного стола 22 вблизи его переднего конца (справа на чертеже) расположен конечный выключатель LS1, выступающий вниз. Как показано на фиг.5, конечный выключатель LS1 включен, когда запорный рычаг 28 под действием собственной упругости обращен вверх, а встроенный в запорный рычаг 28 механизм сцепления сцеплен с одним из вырезов 26а, образованных в опорном узле поворота 26 основания 21 (см. фиг.3 и 4). Конечный выключатель LS1 размыкается, когда механизм зацепления 29 выходит из выреза 26а при нажатии на запорный рычаг 28 вниз, как показано на фиг.6. В данной реализации конечный выключатель LS1 выключается, когда запорный рычаг 28 не сцеплен с одним из вырезов 26а. Например, это условие означает, что поворотный стол 22 выведен из предварительно заданного положения на основании 21.
Вырезы 26а расположены с интервалами 7,5°, например, по направлению вращения поворотного стола 22. Поворот стола 22 невозможен, если механизм сцепления 29 сцеплен с одним из вырезов 26а. В данной реализации поворотный стол 22 может быть просто закреплен в одном из наиболее часто применяемых углов поворота 15°, 30° и 45° от исходного положения.
Для поворота поворотного стола 22 относительно основания 21 пользователь должен взяться за ручку 27 и той же рукой нажать на запорный рычаг 28, чтобы вывести механизм 29 из зацепления с вырезом 26а, как показано на фиг.6. В этом положении пользователь может ручкой 27 поворачивать поворотный стол в желаемое положение относительно основания 21.
Вследствие действия силы тяжести поворотный стол 22 не так легко повернуть относительно основания 21, даже когда механизм сцепления 29 не сцеплен ни с одним из вырезов 26а. Поэтому операции резания можно выполнять и в том случае, когда механизм сцепления 29 не сцеплен ни с одним из вырезов 26а. Однако при резке обрабатываемой детали в случае, когда механизм сцепления 29 не сцеплен ни с одним из вырезов 26а, может применяться другой механизм для фиксации поворотного стола 22 относительно основания 21.
Далее будет изложен процесс индикации угла наклона и угла поворота станка 10 со ссылками на фиг.7.
Когда пользователь включает ключ S3, ИС сброса 122 включает переключающий элемент S1, после того, как напряжение батареи 110 достигнет заданного значения. Заданное постоянное напряжение подается на микрокомпьютер 160. После этого микрокомпьютер 160 выдает сигнал на продолжение подачи питания с порта вывода 166b, поддерживая тем самым включенное состояние переключающего элемента S1 и способность дисплея 70 к индикации (S101).
Затем микрокомпьютер 160 с порта вывода 166 с выдает сигнал для отображения на дисплее 70 демонстрационного экрана (S102). Возможными вариантами такого демонстрационного экрана могут быть наименование модели станка для резки под углом или приветствие. Такой экран может увеличить привлекательность для пользователя станка 10. Следует заметить, что индикация демонстрационного экрана может быть опущена в зависимости от применения станка 10. Одновременно микрокомпьютер 160 запускает таймер 164 (S103).
После индикации демонстрационного экрана на S102 микрокомпьютер 160 определяет, истекло ли заданное время t1 с начала отсчета времени таймером 164 (S103). Если время t1 не истекло, на дисплее 70 продолжает отображаться демонстрационный экран (S104:HET). Когда на этапе S104 обнаружится, что время t1 истекло (S104:AA), микрокомпьютер 160 запускает таймер взятия выборки для получения данных для индикации углов (S105). Затем микрокомпьютер 160 определяет, истекло ли время t2 после запуска таймера взятия выборки (S106). Если микрокомпьютер 160 обнаруживает, что время t2 истекло (S106:AA), то таймер взятия выборки сбрасывается на ноль и запускается снова (S107). Однако, если микрокомпьютер 160 обнаруживает на этапе S106, что время t2 не истекло, процесс возвращается назад на этап S106, пока не истечет время t2.
Затем микрокомпьютер 160 обнаруживает выходной сигнал от ИС сброса 122 на порту ввода 1б6а и определяет, оперировал ли пользователь ключом S3 для отключения дисплея 70 (S108). Если да, то на порт ввода 166а поступает сигнал высокого уровня. В соответствии с этим микрокомпьютер 160 определяет, что пользователь выдал ключом S3 команду на отключение дисплея 70 (S108:ДА), и микрокомпьютер 160 с порта вывода 166 с выдает сигнал на отключение дисплея 70. Одновременно микрокомпьютер 160 через порт вывода 166b выдает сигнал на сохранение питания на микрокомпьютере 160, отключая для этого переключающий элемент S1 (S109).
Если на этапе S108 на порте ввода 166а обнаруживается сигнал низкого уровня, то микрокомпьютер 160 устанавливает, что пользователь не оперировал ключом S3 для отключения дисплея 70. Тогда микрокомпьютер 160 поочередно переходит к процедуре индикации угла поворота (S110) и процедуре индикации угла наклона (S111). Если микрокомпьютер 160 обнаруживает, что ключ S3 отключен (S108:HET), то микрокомпьютер 160 переходит к процедуре индикации угла поворота (S110). Процедура индикации угла поворота (S110) состоит в том, чтобы вычислить и вывести на дисплей значение угла поворота поворотного стола из исходного положения, то есть угол от исходного положения до текущего углового положения поворотного стола относительно основания 21. Процедура индикации угла наклона (S111) состоит в том, чтобы вычислить и вывести на дисплей значение отклонения опорного узла 40 от вертикального исходного положения, то есть угол от вертикального исходного положения до положения, наклонного относительно поворотного стола 22.
Подробности процедуры индикации угла поворота будут описаны применительно к фиг.8. В соответствии с фиг.8 на микрокомпьютер 160 поступают данные о напряжении на датчике угла поворота 190, получаемые с выхода потенциометра 50 через АЦП 165 (S201).
Затем данные о напряжении датчика угла поворота 190, соответствующие вырезу 26а, считываются из памяти 170 (S202). Через порт ввода 166а считывается выход датчика положения поворота 130 для определения, включен ли конечный выключатель LS1. Другими словами, микрокомпьютер определяет, входит ли механизм сцепления 29 в один из вырезов 26а, на основании выходного сигнала датчика положения поворота 130 (S203).
Здесь предварительно заданные угловые данные, соответствующие вырезам 26а, хранящиеся в памяти 170, представляют собой выходные данные датчика угла поворота 190 для углов 7.5°, 15°, 22.5°,..., соответственно.
Микрокомпьютер 160 устанавливает, что механизм сцепления не входит ни в один из вырезов 26а, если конечный выключатель LS1 не включен на этапе S203 (S203:НЕТ). Тогда микрокомпьютер 160 использует соотношения между значениями выходного напряжения датчика угла поворота 190 и предварительно заданными углами поворота, такими как 7.5°, 15°, 22.5°,..., хранящимися в памяти 170, а затем вычисляет угол поворота, исходя из значения напряжения на выходе датчика угла поворота 190. Микрокомпьютер 160 отображает этот угол поворота на дисплее 70.
Вышеописанный расчет угла поворота будет описан здесь более подробно. Для вычисления угла поворота микрокомпьютер 160 сравнивает различные значения напряжения в памяти 170 с выходным напряжением датчика угла поворота 190 и выбирает две предварительно заданные позиции из памяти 170 (S204). Предварительно выбранные позиции удовлетворяют следующим условиям. Одна из них должна быть ближайшим к напряжению датчика угла поворота 190 и меньшим значением напряжения и соответствующим первым угловым положением. Другая должна быть ближайшим к напряжению датчика угла поворота 190 и большим значением напряжения и соответствующим вторым угловым положением. Затем микрокомпьютер 160, используя метод линейной аппроксимации, из этих двух значений вычисляет значение угла поворота поворотного стола 22 (S205). Следует заметить, что наряду с методом линейной аппроксимации микропроцессор 160 мог бы использовать любой другой способ аппроксимации для вычисления значения угла поворота поворотного стола 22. Затем микрокомпьютер 160 пересылает вычисленное значение угла поворота поворотного стола 22 на дисплей 70 (S206). После этого микрокомпьютер 160 переходит на этап S110.
Однако, если на этапе S203 конечный выключатель LS1 включен, то микрокомпьютер 160 устанавливает, что механизм сцепления введен в один из вырезов 26а, соответствующих заранее определенным углам поворота. В этом случае микрокомпьютер 160 выбирает предварительно заданный угол поворота среди данных, считываемых из памяти 170, и отображает выбранный угол поворота на дисплее 70 (S208).
Для вычисления угла поворота в этом случае микрокомпьютер 160 сравнивает различные значения напряжения в памяти 170 с выходным напряжением датчика угла поворота 190. Микрокомпьютер 160 выбирает из предварительно заданных значений угла в памяти 170 ближайшее к выходному напряжению датчика угла поворота 190 и выводит на дисплей это предварительно заданное значение в качестве угла поворота (S208).
После завершения процесса на этапе S208 микрокомпьютер 160 посылает значение выходного напряжения датчика угла поворота 190 и соответствующее ему предварительно определенное положение в память 170 через порт памяти 168а (S209). Иными словами, микропроцессор 160 обновляет таблицу, включая соответствия между предварительно заданными положениями и соответствующими выходными напряжениями датчика угла поворота 190 (S209). Затем микропроцессор 160 переходит на этап S111 (см. фиг.7).
Далее подробно описывается процедура индикации угла наклона со ссылками на фиг.9. При этой процедуре микрокомпьютер 160 вычисляет и выводит на дисплей угол наклона станка 10. Микрокомпьютер 160 получает значения напряжения отдатчика угла наклона 180 (S301).
Затем микрокомпьютер 160 считывает из памяти 170 значения угла наклона, соответствующие положениям, при которых конечные выключатели LS2 и LS3 включены, когда направляющая наклона 42 и болт 25 соприкасаются (S302). Выходной сигнал датчика положения наклона 140, указывающий, включены ли конечные выключатели LS2 и LS3, поступает через порт ввода 166а. Микрокомпьютер 160 определяет, соединяется ли направляющая наклона 42 с болтом 25 и включен ли конечный выключатель LS2 или конечный выключатель LS3 (S303).
Если на этапе S216 не включен ни конечный выключатель LS2, ни конечный выключатель LS3, то микрокомпьютер делает вывод, что направляющая наклона 42 и болт 25 не соприкасаются. Микрокомпьютер 160 использует таблицу соответствующих напряжений и углов наклона, хранящуюся в памяти 170, и выходные напряжения датчика угла наклона 180 для вычисления угла наклона опорного узла (S304) и вывода значения этого угла наклона на дисплей 70 (S305). Затем микропроцессор 160 переходит на этап S 112.
На этапе S304 микрокомпьютер 160 сравнивает набор значений напряжения, хранящийся в памяти 170, с выходным напряжением датчика угла наклона 180 для выбора из множества значений напряжения, хранящихся в памяти 170, двух значений, наиболее близко подходящих к выходному значению датчика сверху и снизу. Пользуясь линейной аппроксимацией между углами, соответствующими двум выбранным напряжениям, микрокомпьютер 160 вычисляет угол наклона, эквивалентный выходному напряжению датчика угла наклона 180 (S304) и выводит вычисленное значение угла наклона на дисплей в качестве угла наклона опорного узла 40 (S305).
Если на этапе S303 включен либо конечный выключатель LS2, либо конечный выключатель LS3, то микрокомпьютер делает вывод, что направляющая наклона 42 и болт 25 соприкасаются. Микрокомпьютер 160 ищет в памяти 170 угол наклона, соответствующий напряжению на выходе датчика угла наклона 180 (S306), и выводит этот угол наклона на дисплей 70 (S307).
Для вычисления угла наклона в этом случае микрокомпьютер 160 сравнивает различные значения напряжения, хранящиеся в памяти 170, с выходным напряжением датчика угла наклона 180. Микрокомпьютер 160 из данных, хранящихся в памяти 170 (S306), выбирает угол наклона, которому соответствует напряжение, наиболее близкое к напряжению на выходе датчика угла наклона 180, и выводит этот угол наклона на дисплей (S307).
После завершения этапа S307 микрокомпьютер 160 посылает угол наклона, соответствующий выходному напряжению датчика угла наклона 180, в память 170 через порт памяти 168а для обновления таблицы в памяти 170 (S308). Затем микрокомпьютер 160 переходит на этап S112.
Затем микрокомпьютер 160 через порт ввода 166а проверяет состояние выхода узла сброса 150, чтобы установить, включен ли конечный выключатель LS5 для сброса отображаемого на дисплее угла поворота (S112). Если конечный выключатель LS5 не включен, микрокомпьютер 160 переходит на этап S116. Если же конечный выключатель LS5 включен, микрокомпьютер 160 через порт вывода 166 с (S113) сбрасывает угол поворота, отображаемый на дисплее, на 0° и переключает исходное положение на другое исходное положение, соответствующее отображаемому углу поворота (S114). Микрокомпьютер 160 вычисляет новое значение предварительно заданного угла для выреза 26а, соответствующего углу поворота в точке сброса, и сохраняет этот новый угол в памяти 170 (S115).
Затем микрокомпьютер 160 определяет, включен ли конечный выключатель LS4 для сброса отображаемого угла наклона (S116). Если конечный выключатель LS4 не включен, микрокомпьютер 160 переходит на этап S120. Если же конечный выключатель LS4 включен, микрокомпьютер 160 сбрасывает выведенный угол наклона на ноль (S117) и переключает исходное вертикальное положение на другое исходное положение, соответствующее углу, отображаемому на дисплее 70 при включенном конечном выключателе LS4 (S118). Микрокомпьютер 160 вычисляет новый угол наклона, соответствующий положению, при котором направляющая наклона 42 и болт 25 соприкасаются, исходя из угла наклона в точке сброса, и сохраняет это новое значение в памяти 170 (S119).
На этапах S115 и S119 память 170 размещена в других областях, отличных от первоначальной области, и предназначенных для хранения данных, переданных микрокомпьютером 160 после активизации узла сброса 150 при срабатывании конечных выключателей LS4 или LS5. В соответствии с этим в памяти 170 могут храниться два рода таблиц соответствия между предварительно заданными положениями и напряжениями датчиков поворота и наклона 180 и 190 после включения по меньшей мере одного из конечных выключателей LS4 или LS5.
В памяти 170 могут продолжать храниться две таблицы, начальная и новая таблица, полученная при сбросе дисплея 70 после отключения питания микрокомпьютера 160. Таким образом, это создает дополнительное удобство, благодаря которому микрокомпьютер 160 может использовать две таблицы в зависимости от предпочтений пользователя, после того, как питание отключено и включено снова. Можно также предусмотреть другой ключ для возвращения первоначальной таблицы расчета угла без стирания новой таблицы, сохраняемой в памяти 170, когда питание отключается и снова включается после активизации узла сброса 150. При такой конфигурации устройством индикации углов, предлагаемым в данном изобретении, пользователь может управлять по своему желанию.
По завершении сброса дисплея микрокомпьютер 160 определяет, сохранился ли прежний выходной сигнал датчика угла поворота 190 по меньшей мере в течение заданного интервала времени (S120). Если в течение заданного интервала времени произошли какие-либо изменения, микрокомпьютер 160 возвращается на этап S106.
Если же выходной сигнал датчика угла поворота 190 не изменился в течение заданного интервала времени на этапе S120, то микрокомпьютер 160 определяет, не изменился ли выходной сигнал датчика угла наклона 180 в течение заданного интервала времени (S121). Если в течение заданного интервала времени произошли какие-либо изменения, микрокомпьютер 160 возвращается на этап S106.
Если же в течение заданного интервала времени на этапе S121 не произошло никаких изменений, то на этапе S109 микрокомпьютер 160 выдает сигнал на отключение дисплея 70 через порт вывода 166с. Одновременно микрокомпьютер 160 выдает сигнал для сохранения питания на микрокомпьютере 160 через порт вывода 166b.
Таким образом, если в течение заданного интервала времени никаких изменений не произошло, микрокомпьютер 160 переходит на этап S109, выдает сигнал через порт вывода 166 с на отключение дисплея 70 и выдает сигнал через порт вывода 166b на сохранение питания на микрокомпьютере 160.
Такая схема позволяет станку 10 снизить потребление энергии от батареи 110, которая является источником энергии для устройства индикации углов 70.
В описанном выше варианте станок 10 имеет функцию наклона, осуществляемую опорным узлом 40, и функцию поворота, осуществляемую поворотным столом 22; однако станок 10 может обладать только одной из этих функций.
Датчики угла в данном варианте реализованы на потенциометрах 50 и 60, но необязательно ограничены этими устройствами. Например, в качестве датчиков угла могут использоваться преобразователи углового положения оси в код (преобразователи угол-код). Ниже описывается процесс определения угла поворота поворотного стола 22 с использованием преобразователя угол-код.
При использовании для определения угла поворота поворотного стола 22 преобразователя угол-код на каждый градус поворота поворотного стола 22 генерируются двадцать импульсов двух типов А и В, смещенных по фазе относительно друг друга на 90°. Эти импульсы используются для определения угла поворота поворотного стола 22. Использование двух типов импульсов А и В, смещенных по фазе на 90°, позволяет установить, поворачивается ли поворотный стол 22 по часовой или против часовой стрелки.
На фиг.10 приведен конкретный пример, где "1" означает импульс высокого уровня, а "0" - импульс низкого уровня. Если импульс А равен 0 и импульс В тоже равен 0, а следующий импульс А становится 1, тогда как импульс В остается 0, то это может быть интерпретировано как вращение поворотного стола на фиг.10 вправо, то есть по часовой стрелке. Если же импульсы А и В равны 0, а следующий импульс В становится 1, тогда как импульс А остается 0, то это может быть интерпретировано как вращение поворотного стола на фиг.10 влево, то есть против часовой стрелки.
Далее, двадцать импульсов каждого типа А и В генерируются при повороте поворотного стола 22 на 1°. Таким образом, при повороте поворотного стола 22 на 0,05° генерируется по одному импульсу каждого типа А и В, как показано на фиг.10. Если, например, поворотный стол 22 из положения 0° поворачивается в положение 45°, то генерируются 900 импульсов каждого типа А и В.
Микрокомпьютер 160 отображает угол поворота поворотного стола 22 в единицах по 0,2°. Иными словами, угол поворота поворотного стола 22, отображаемый на дисплее 70, становится больше или меньше на 0,2° всякий раз, когда поворотный стол 22 поворачивается на 0,2° по или против часовой стрелки.
В данном случае предположим, что на дисплей 70 выведен 0°, и что угол поворота поворотного стола 22 также в точности равен 0°. Когда поворотный стол 22 поворачивается вправо на фиг.10, угол поворота, отображаемый на дисплее 70, остается на 0°, даже если микрокомпьютер 160 обнаруживает импульсы, указывающие, что поворотный стол 22 повернулся в положение 0,05°. Если поворотный стол 22 продолжает поворачиваться, и микрокомпьютер 160 обнаруживает импульсы, указывающие, что поворотный стол 22 повернулся на 0,20°, микрокомпьютер 160 добавляет 0,2° к значению, отображенному на дисплее, и изменяет это значение на 0,2°. Если поворотный стол 22 продолжает поворачиваться, и микрокомпьютер 160 обнаруживает импульсы, указывающие, что поворотный стол 22 повернулся на 0,30°, микрокомпьютер 160 добавляет 0,2° к значению, отображенному на дисплее, и изменяет это значение на 0,4°.
Предположим теперь, что дисплей 70 показывает 0,4°, и поворотный стол 22 вращается против часовой стрелки из положения, в точности равного 0,4°. В данном случае дисплей 70 будет продолжать показывать 0,4°, даже если микрокомпьютер 160 обнаружит импульс, указывающий, что поворотный стол повернулся в положение 0,35°. Если поворотный стол 22 продолжает поворачиваться против часовой стрелки, и микрокомпьютер 160 обнаруживает импульсы, указывающие, что поворотный стол 22 повернулся на 0,30°, микрокомпьютер 160 вычитает 0,2° из значения, отображенного на дисплее, и изменяет это значение на 0,2°. Если поворотный стол 22 продолжает поворачиваться против часовой стрелки, и микрокомпьютер 160 обнаруживает импульсы, указывающие, что поворотный стол 22 повернулся на 0,20°, микрокомпьютер 160 снова вычитает 0,2° из значения, отображенного на дисплее 70, и изменяет это значение на 0°.
Теперь предположим, что на дисплей 70 выведено значение 14,8°, и что угол поворота поворотного стола 22 также в точности равен 14,8°. Поворотный стол 22 вращается по часовой стрелке, то есть вправо по фиг.11. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 14,85°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 15,0°.
Когда поворотный стол 22 продолжает поворот из этого положения, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 15,15°, микрокомпьютер 160 выведет на дисплей 15,2°.
Теперь, напротив, предположим, что на дисплей 70 выведено значение 15,2°, и что угол поворота поворотного стола 22 в точности равен 15,2°. Поворотный стол 22 вращается против часовой стрелки, то есть влево по фиг.11. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 15,15°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 15,0°.
Когда поворотный стол 22 продолжает поворот из этого положения, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 14,85°, микрокомпьютер 160 выведет на дисплей 14,8°.
Теперь предположим, что на дисплей 70 выведено значение 22,4°, но угол поворота поворотного стола 22 равен 22,35°. Поворотный стол 22 вращается по часовой стрелке, то есть вправо по фиг.12. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 22,40°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 22,5°.
Когда поворотный стол 22 продолжает поворот из этого положения, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 22,60°, микрокомпьютер 160 выведет на дисплей 22,6°.
Теперь, напротив, предположим, что на дисплей 70 выведено значение 22,6°, а угол поворота поворотного стола 22 равен 22,65° при условии, что поворотный стол 22 вращается против часовой стрелки, то есть влево по фиг.12. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 22,60°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 22,5°.
Когда поворотный стол 22 продолжает поворот из этого положения, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 22,40°, микрокомпьютер 160 выведет на дисплей 22,4°.
Далее, предположим, что на дисплей 70 выведено значение 31,4°, а угол поворота поворотного стола 22 равен 31,40° при условии, что поворотный стол 22 вращается по часовой стрелке, то есть вправо по фиг.13. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 31,45°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 31,6°.
Когда поворотный стол 22 продолжает поворот из этого положения, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 31,75°, микрокомпьютер 160 выведет на дисплей 31,8°.
Теперь, напротив, предположим, что на дисплей 70 выведено значение 31,8°, а угол поворота поворотного стола 22 равен 31,80° при условии, что поворотный стол 22 вращается против часовой стрелки, то есть влево по фиг.13. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 31,75°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 31,6°.
Когда поворотный стол 22 продолжает поворот, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 31,45°, микрокомпьютер 160 выведет на дисплей 31,4°.
Теперь предположим, что на дисплей 70 выведено значение 35,2°, а угол поворота поворотного стола 22 в точности равен 35,20°, как показано на фиг.14. Поворотный стол 22 вращается по часовой стрелке, то есть вправо по фиг.14. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 35,25°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 35,3°.
Когда поворотный стол 22 продолжает поворот, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 35,35°, микрокомпьютер 160 выведет на дисплей 35,4°.
Теперь, напротив, предположим, что на дисплей 70 выведено значение 35,4°, а угол поворота поворотного стола 22 в точности равен 35,40°. Поворотный стол 22 вращается против часовой стрелки, то есть влево по фиг.14. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 35,35°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 35,3°.
Когда поворотный стол 22 продолжает поворот, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 35,25°, микрокомпьютер 160 выведет на дисплей 35,2°.
Теперь предположим, что на дисплей 70 выведено значение 44,8°, а угол поворота поворотного стола 22 также равен 44,80°. Поворотный стол 22 вращается по часовой стрелке, то есть вправо по фиг.15. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 44,85°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 45,0°.
Когда поворотный стол 22 продолжает поворот, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 45,15°, микрокомпьютер 160 выведет на дисплей 45,2°.
Теперь, напротив, предположим, что на дисплей 70 выведено значение 45,2°, а угол поворота поворотного стола 22 равен 45,20°. Поворотный стол 22 вращается против часовой стрелки, то есть влево по фиг.15. Если микрокомпьютер 160 обнаруживает импульс, показывающий, что поворотный стол 22 повернулся в положение 45,15°, то микрокомпьютер 160 выводит на дисплей 70 специальный угол поворота 45,0°.
Когда поворотный стол 22 продолжает поворот, и микрокомпьютер 160 обнаруживает импульс, указывающий, что поворотный стол 22 повернулся на 44,85°, микрокомпьютер 160 выведет на дисплей 44,8°.
В этом методе, когда импульс, обнаруженный датчиком угла поворота, оказывается в зоне специальных углов поворота, таких как зоны в области 0, 15, 22,5, 31,6, и 45, микрокомпьютер 160 может выводить на дисплей 70 специальные углы поворота. В соответствии с этим пользователь может распознать, когда поворотный стол 22 повернулся на предварительно заданный угол, такой как 0, 15, 22,5, 31,6, или 45. Угол наклона опорного узла 40 может определяться аналогичным образом с использованием преобразователя угол-код.
Поскольку в варианте, описанном выше, наклон опорного узла 40 может осуществляться только в одну сторону, функция наклона может быть конфигурирована для наклона как вправо, так и влево с использованием в качестве исходной точки вертикального положения.
В варианте, описанном выше, направляющая наклона 42 и болт 25 расположены так, что они соприкасаются, когда опорный узел 40 находится в вертикальном положении или отклонен на максимальный угол. Однако эти соприкасающиеся элементы могут быть отрегулированы таким образом, что они будут соприкасаться в других положениях между вертикальным положением и положением максимального отклонения. В этом случае целесообразно предусмотреть функцию выдачи сигнала при соприкосновении элементов.
В варианте, описанном выше, станок 10 оснащен поворотным столом 22, который может поворачиваться относительно основания 21, а опорный узел 40 связан с основанием 21 через поворотный стол 22. Однако станок 10 может не иметь поворотного стола 22, и тогда опорный узел 40 соединен с основанием 21 непосредственно.
В варианте, описанном выше, кронштейн 32 установлен с шарнирной опорой на опорный узел 40. Однако опорный узел 40 может быть выполнен в виде разделенной конструкции, в которой часть, поддерживающая шарнирную ось 41 и кронштейн 32, может скользить по части, соединенной с поворотным столом 22 или основанием 21, оставаясь параллельной боковым граням пильного диска 31.
Станок 10, описанный выше, обладает следующими преимуществами.
Станок 10 может отображать угол, не вводя в заблуждение пользователя. Станок 10 может резать обрабатываемую деталь в наклонном положении относительно боковой грани обрабатываемой детали.
Углы, под которыми установлены опорный узел 40 или основание 21 и поворотный стол 22, отображаются не на основе сигналов датчиков угла поворота и наклона 180 и 190, а на основе данных таблицы предварительно заданных углов, хранящейся в памяти 170. Поэтому углы, отображаемые на дисплее, совпадают с углами, указанными для каждого выреза 26а. Благодаря этому система не выдает пользователю различные значения углов, которые могут ввести в заблуждение и привести к снижению эффективности.
Когда опорный узел или основание и поворотный стол установлены под предварительно заданными углами, можно откорректировать углы, определяемые датчиками и выводимые на дисплей, всегда, когда опорный узел или основание и поворотный стол установлены под предварительно заданными углами. Поэтому, если значения углов, определяемые датчиками угла, отклоняются от значений, определяемых механическим сцеплением в заданном положении, эти отклонения отображаемых на дисплее углов, вызванные ошибками измерения, можно подавить.
Соприкосновением направляющей наклона на опорном узле с болтом, установленным на основании или поворотном столе, определяются положения, при которых боковые грани пильного диска или перпендикулярны к поверхности основания (наиболее часто используемое положение), или наклонены под максимальным углом (45°). Далее, снабдив станок датчиком угла наклона, выдающим на контроллер сигнал, когда боковые грани пильного диска расположены под прямым или под максимальным углом к поверхности основания, можно устранить несоответствие между значением угла, выведенным на дисплей, и значением угла, определяемым установкой в наиболее употребительные положения резания.
Если значение угла, установленное для точки соприкосновения направляющей наклона опорного узла с головкой болта, отличается от угла, измеренного датчиком угла наклона, когда узел сцепления соприкасается с головкой болта, можно откорректировать значение угла в соответствии с измеренным значением. Поэтому при обнаружении расхождений в положении, соответствующем заданному значению угла, можно откорректировать это положение.
Станок сбрасывает отображаемый на дисплее угол на ноль в желаемом положении, при последующих операциях отсчитывая углы наклона и углы поворота от нового исходного положения, соответствующего положению, при котором было сброшено значение угла. Такое устройство позволяет пользователю обозначать в качестве исходного положения 0° любое желаемое положение, повышая тем самым эффективность.
При сбросе отображаемого угла на ноль в памяти может сохраняться новая таблица отношений между вырезами и выходом датчиков. Таким образом, пользователь может выбрать из памяти одну из двух таблиц, показывающих соотношение после сброса дисплея на ноль. Это дает возможность легко вернуть исходный угол к первоначальному 0°, благодаря чему повышается эффективность.
Наличие источника постоянного напряжения позволяет подавить ухудшение точности измерения.
Дисплей расположен на лицевой поверхности поворотного стола, что делает его легко обозримым для пользователя во время работы.
Если отображаемый угол не изменился в течение предварительно заданного периода, электропитание временно отключается. Таким образом, можно сократить потребление электроэнергии, что особенно эффективно, если источником электроэнергии является батарея.
При использовании батареи в качестве источника электроэнергии дисплей может быть установлен почти в любом месте без ограничения. Использование источника питания, которым снабжен узел резания, требует сложной системы проводов, тогда как батарея позволяет легко установить дисплей на основании или поворотном столе, что повышает удобство обозрения дисплея.
Вывод на заданное время после подачи питания демонстрационного экрана, не имеющего отношения к индикации углов, например, с изображением наименования модели или с приветствием, может повысить в глазах пользователя привлекательность изделия.
Конфигурирование поворотного стола и основания так, чтобы положением 0° было наиболее часто употребляемое положение, может способствовать повышению эффективности.
Более частое размещение вырезов в заданных угловых положениях может способствовать повышению производительности. Далее, можно отображать углы без вариаций, если установлено, что рычаг и вырез сцеплены; это препятствует снижению производительности.
Интервалы между вырезами 26а не обязательно должны быть одинаковыми. Далее описывается другой вариант реализации станка 10. В этом варианте от вышеописанной конструкции отличается только конструкция станка 10. Поэтому описание дисплея 70 и контроллера 100 опускается.
Как видно на фиг.16, станок 10 имеет основание 301 и поворотный стол 302, врезанный в центр основания 301, так что поверхность поворотного стола 302 лежит в одной плоскости с поверхностью основания 301, как показано на фиг.16, и может вращаться в горизонтальной плоскости. Деревянное обрабатываемое изделие Р лежит на поверхности основания 301 и поворотного стола 302.
Как показано на фиг.17, основание 301 имеет боковые стенки 301а и 301b. Вырезы 303 дугообразной формы прорезаны с внутренней стороны боковой стенки 301а. Стопор 304 вставлен в один из вырезов 303. Стопор 304 опирается на крышку 305, как показано на фиг.18. Стопор 304 имеет конечный выключатель LS 10, помещенный на его конце. Конечный выключатель LS 10 соединен с контроллером 100 (не показан). Пружина 306 стопора толкает стопор 304 наружу от центра вращения поворотного стола 302, так что стопор входит в один из вырезов 303. Как показано на фиг.18 и 19, ручка 307 навинчена на выступающий конец поворотного стола 302 и может осью 308, расположенной на конце ручки 307, нажимать на стенку 301b основания 301. Вращение поворотного стола 302 относительно основания 301 ограничено затяжкой ручки 307, давящей осью 308 на стенку 301b.
Поворотный управляющий элемент 310 прикреплен к поворотному столу 302 около ручки 307 на оси 309, перпендикулярной оси ручки 307. Управляющий элемент 310 имеет рычажок 310а, расположенный рядом с ручкой 307. Пользователь воздействует на рычажок 310а той же рукой, которой он держит ручку 307.
Выступающая деталь 310 с расположена на управляющем элементе 310 напротив рычажка 310а симметрично относительно оси 309. В выступающей детали 310 с проделано продолговатое отверстие 310d, состоящее из отверстия малого диаметра и отверстия большого диаметра; эти отверстия расположены рядом и сливаются между собой. Штифт 311, вставленный в отверстие 310d, входит в поворотный стол 302 и может скользить в направлении его оси. Штифт 311 состоит из участка малого диаметра 311а и участка большого диаметра 311b. Пружина 312 нажимает на штифт 311, так что участок малого диаметра 311а располагается в выступающей детали 310 с управляющего элемента 310 и удерживается там, тогда как по меньшей мере конец участка большого диаметра 311b выступает наружу из поворотного стола 302.
Ось 313 также удерживается в поворотном столе 302 и может скользить вдоль его оси. Один конец оси 313 может соприкасаться с выступающей деталью 310b управляющего элемента 310, а другой конец соприкасается с выступающей частью 304а стопора 304. При вращении управляющего элемента 310 стопор 304 движется вперед и назад вдоль оси 313.
Ограничитель 333 закреплен на поверхности основания 301 и служит опорой для боковой грани обрабатываемого изделия Р, как показано на фиг.16. В центре поворотного стола 302 расположена приемная пластина (не показана) с пазом для пильного диска 334. При резании обрабатываемого изделия Р пильный диск 334 вставляется в паз, выполненный в этой приемной пластине, так что нижний конец пильного диска 334 опущен ниже поверхности поворотного стола 302. Таким образом, приемная пластина для диска позволяет избежать образования заусенцев и шероховатостей на нижней отделанной поверхности обрабатываемого изделия Р. На заднем конце поворотного стола 302 на оси 314 установлен кронштейн 315. При расположении центра оси 314 кронштейна заподлицо с поверхностью поворотного стола 302 кронштейн 315 можно наклонять влево и вправо над поверхностью поворотного стола 302, используя ось 314 кронштейна в качестве оси поворота.
Как показано на фиг.20, в задней части поворотного стола 302 имеется удлиненная щель 302а, расположенная по центру над осью 314 кронштейна. Зажимной рычаг 316 проходит сквозь щель 302а, а резьбовая часть (не показана) на конце зажимного рычага 316 ввинчивается в резьбовое отверстие на задней стороне кронштейна 315. Если ослабить зажимной рычаг 316, кронштейн 315 можно наклонять относительно оси 314 в пределах щели 302а. Когда зажимной рычаг 316 затянут, поворотный стол 302 зажат между зажимным рычагом 316 и кронштейном 315, и кронштейн 315 закреплен в требуемом положении. Размер щели 302а позволяет наклонять кронштейн 315 приблизительно на 45° как вправо, так и влево.
Когда кронштейн 315 установлен под прямым углом к поворотному столу 302, сквозные отверстия 315а, проходящие в двух местах через верх кронштейна 315, расположены параллельно поверхности поворотного стола 302. В этих сквозных отверстиях 315а имеются держатели ползунов (не показаны), и через отверстия 315а проходят параллельно друг другу слева направо два направляющих стержня 317. Направляющие стержни 317 могут скользить взад и вперед параллельно поверхности поворотного стола 302 в держателях ползунов. На переднем конце направляющих стержней 317 установлен держатель 318 пильного диска, а на заднем конце направляющих стержней 317 расположен упор 319, препятствующий выходу направляющих стержней 317 из сквозных отверстий 315а. Круглая ручка 320, расположенная на кронштейне 315 сбоку, стопорит скольжение направляющих стержней 317.
Секция 322 пильного диска шарнирно установлена поверх держателя 318 пильного диска и может поворачиваться вверх и вниз на оси 321 над поверхностью основания 301. Между держателем 318 пильного диска и секцией 322 пильного диска расположена пружина 323, оттягивающая секцию 322 пильного диска вверх.
Секция 322 пильного диска удерживает вал 324, на котором вращается пильный диск 334. В секции 322 пильного диска расположен также блок двигателя 325, сцепленный с валом 324 пильного диска, и ручка 326.
На передней поверхности кронштейна 315 предусмотрены стопоры 315b и 315 с для фиксации кронштейна 315 в наклонном положении. Стопорные болты 327 и 328 ввинчиваются вертикально сверху в заднюю часть поворотного стола 302 вдоль траектории стопоров 315b и 315с. Если кронштейн 315 наклонен, то стопор 315b или стопор 315 с соприкасается с головкой соответствующего стопорного болта 327 или стопорного болта 328 при заданном угле наклона, определяющем наклонное положение секции 322 пильного диска. Стопорный болт 327 расположен с возможностью соприкосновения со стопором 315b, когда кронштейн 315 наклонен влево на 45°. Стопорный болт 328 расположен с возможностью соприкосновения со стопором 315с, когда кронштейн 315 наклонен вправо на 45°. Штифт 329 предусмотрен в поворотном столе 302 для фиксации кронштейна 315 под прямым углом к поворотному столу 302 и может перемещаться в горизонтальном направлении вперед и назад. Когда кронштейн 315 установлен так, как показано на фиг.20, стопорный болт 330 ввинчен горизонтально в кронштейн 315 в направлении траектории штифта 329. Когда кронштейн 315 установлен для резания под прямым углом, конец стопорного болта 330 соприкасается с периферийной частью штифта 329.
Далее действие стопорных устройств, используемых в станке для резки под углом в соответствии с изобретением будет описано со ссылками на фиг.17 и 18.
Как показано на фиг.17 и 18 стопор 304 соприкасается с внутренней стороной боковой стенки 301а под нажимом пружины 306 стопора. Когда поворотный стол 302 вращается, стопор 304 входит в одну из прорезей 303, как показано на фиг.17, не давая поворотному столу 302 поворачиваться дальше. Кроме того, когда стопор 304 входит в одну из прорезей 303, включается конечный выключатель LS10 на конце стопора 304, чтобы контроллер 100 мог определить, что стопор 304 вошел в прорезь 303. Чтобы поворачивать поворотный стол 302 дальше, пользователь должен потянуть рычажок 310а вверх. При этой операции поворачивается управляющий элемент 310, так что выступающая деталь 310с толкает ось 313 к центру вращения поворотного стола 302. Ось 313 в свою очередь толкает выступающую часть 304а стопора 304, и стопор 304, преодолевая сопротивление пружины 306, выходит из прорези 303, снимая этим блокировку вращения поворотного стола 302. Поворотный стол 302 можно вращать, пока поддерживается это состояние.
Чтобы снова заблокировать вращение поворотного стола 302, пользователь отпускает ручку управляющего элемента 310, давая пружине 306 ввести стопор 304 обратно в одну из прорезей 303, прекращая, таким образом, вращение поворотного стола 302. Соответственно, чтобы повернуть поворотный стол 302, нужно потянуть вверх управляющий элемент 310.
Опишем теперь операции, требующиеся для свободного вращения поворотного стола 302. Как показано на фиг.21, пользователь поднимает вверх рычажок 310а и перемещает штифт 311 против действия пружины 312, чтобы участок большого диаметра 311b вошел в участок большого диаметра отверстия 310d. При отпускании управляющего элемента 310 в этом положении пружина 306 стопора прижимает участок большого диаметра 311b штифта 311 к внутренней стенке отверстия 310d. Сила трения препятствует движению штифта 311, так что управляющий элемент 310 остается во включенном поднятом вверх положении (штифт 311 находится в зацепленном положении). Поскольку в этом состоянии стопор 304 не входит в прорези 303, стопорные устройства поворотного стола 302 сохраняются в освобожденном, не заблокированном положении.
За счет увеличения силы трения между наружной поверхностью участка большого диаметра 311b и внутренней поверхностью отверстия 310d путем придания шероховатости одной из этих поверхностей разблокированное состояние может поддерживаться более надежно, с меньшей вероятностью выхода из этого состояния.
Чтобы зафиксировать поворотный стол 302 в желаемом положении поворота, можно затянуть ручку 307, прижав боковую стенку 301b осью 308.
Чтобы снова ввести в действие стопорное устройство для ограничения вращения поворотного стола 302, то есть вывести его из разблокированного положения, нужно временно приподнять вверх управляющий элемент 310, чтобы образовался зазор между штифтом 311 и отверстием большого диаметра в отверстии 310d, а штифт 311 мог под действием пружины 312 переместиться так, чтобы участок малого диаметра 311а вошел в отверстие 310d, образованное в выступающей части 310с. Теперь управляющий элемент 310 может снова поворачиваться, и стопорное устройство нормально функционировать, как описано выше (штифт 311 находится в незацепленном положении).
После того, как изобретение было подробно описано со ссылками на его конкретные варианты реализации, специалистам в данной области должно быть ясно, что могут быть осуществлены различные модификации, не выходящие за рамки изобретения, определенные в формуле.
Реферат
Изобретение относится к области станкостроения. Технический результат - уменьшение ошибки при определении углов резки. Станок содержит основание; подвижный элемент, установленный с опорой на основание и с возможностью перемещения относительно него, режущий элемент, перемещаемый совместно с подвижным элементом, и детектор для определения, по меньшей мере, одного из углов поворота и углов наклона между режущим элементом и изделием. Детектор выполнен с возможностью выдачи сигнала, указывающего на, по меньшей мере, один определенный им угол. Станок также содержит цифровой контроллер, снабженный аналого-цифровым преобразователем, выполненным с возможностью приема указанного сигнала. 4 н. и 24 з.п. ф-лы, 21 ил.
Комментарии