Способ управления коробкой передач - RU2515952C2
Код документа: RU2515952C2
Чертежи




Описание
Область техники
Настоящее изобретение относится к способу управления коробкой передач. В частности, изобретение относится к способу в соответствии с ограничительной частью пункта 1 формулы изобретения. Кроме того, изобретение относится к системе, транспортному средству, компьютерной программе и компьютерному программному продукту.
Уровень техники
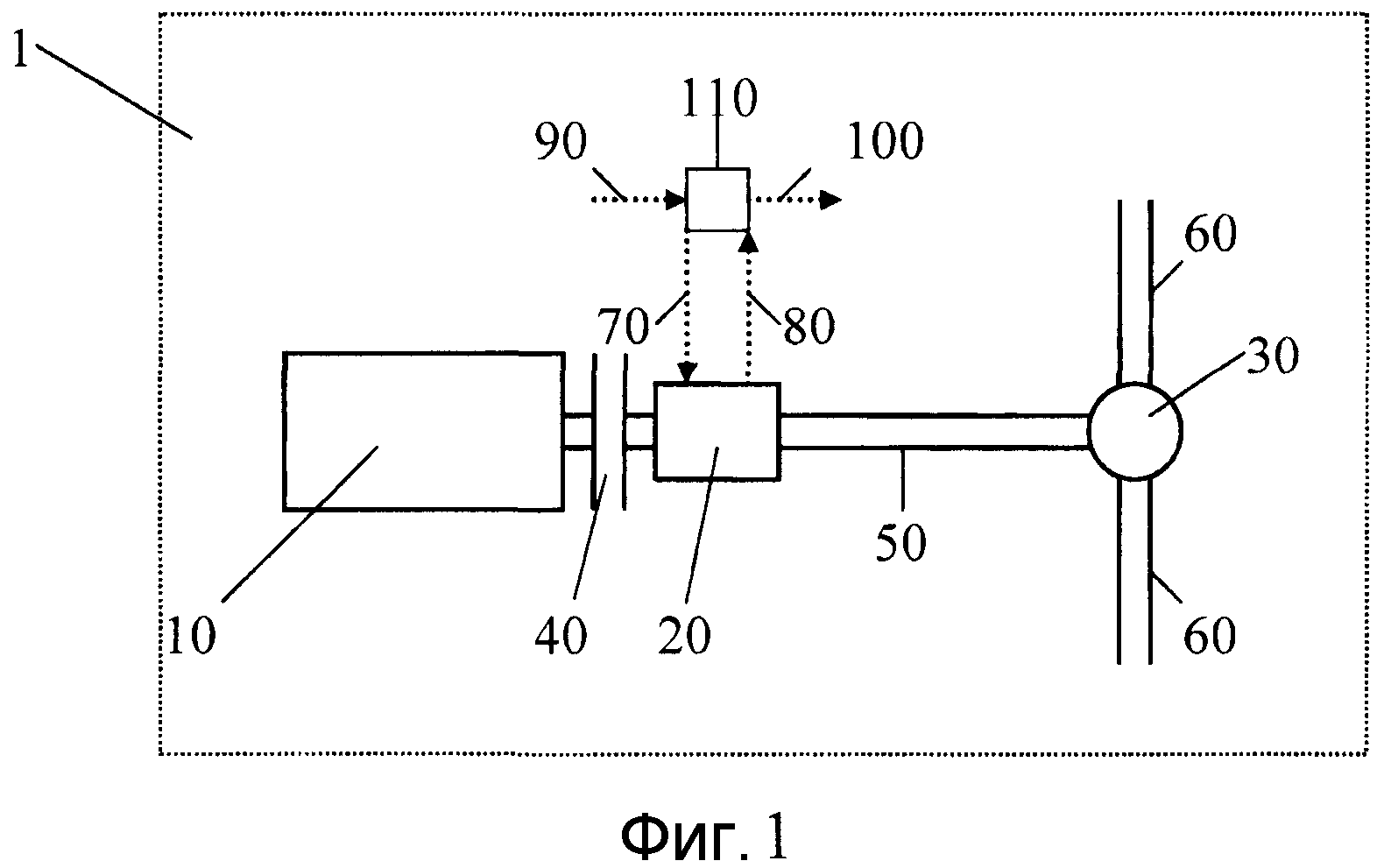
Фиг.1 схематически показывает части силовой передачи для транспортного средства 1, такого как легковой автомобиль или транспортное средство большой грузоподъемности/тяжелое транспортное средство 1, например грузовой автомобиль или автобус. Силовая цепь содержит двигатель 10, механически присоединенный посредством вала к первому концу коробки 20 передач посредством муфты 40. Коробка 20 передач также механически присоединена на ее другом конце посредством карданного вала 50 к дифференциальной передаче 30, взаимодействующей с задним мостом. Задний мост содержит соответствующие левый и правый ведущие валы 60, которые обеспечивают приведение в движение ведущих колес транспортного средства 1 (не показанных на схеме).
При данной хорошо известной конструкции механическая работа двигателя 10 передается посредством различных передаточных устройств, например посредством муфты 40, коробки 20 передач, карданного вала 50, дифференциальной передачи 30 и ведущих валов 60 ведущим колесам для перемещения транспортного средства 1. Важным устройством в силовой цепи является коробка 20 передач, которая имеет некоторое количество передач переднего хода для перемещения транспортного средства 1 вперед и обычно также одну или несколько передач заднего хода. Число передач переднего хода варьируется, но современные виды грузовых транспортных средств, например, обычно предусмотрены с двенадцатью передачами переднего хода.
Коробка 20 передач может представлять собой коробку ручного или автоматического типа (автоматическую коробку передач), но также автоматическую/механическую коробку передач (автоматическую/механическую трансмиссию, АМТ). Автоматические коробки передач и автоматические/механические коробки передач представляют собой автоматизированные системы коробок передач, обычно управляемые управляющим устройством 110, иногда также называемым электронным устройством управления (ЭУУ), которое выполнено с возможностью управления коробкой 20 передач, например, во время переключения передач для выбора передачи при определенной скорости транспортного средства с определенным сопротивлением движению. Электронное устройство управления может обеспечивать измерение частоты вращения двигателя 10 и определение состояния коробки 20 передач, и управление коробкой 20 передач посредством электромагнитных клапанов, соединенных с пневматическими устройствами. Информация о двигателе 10, например о частоте его вращения и крутящем моменте, также передается от двигателя 10 электронному устройству управления, например, посредством шины сети контроллеров (CAN), в транспортном средстве 1.
В обычных системах переключения передач устройство 110 управления использует табличные предельные значения частоты вращения двигателя, также называемые точками переключения передач на графике, которые характеризуют частоту вращения двигателя, при которой переключение на более низкую передачу или переключение на более высокую передачу должны выполняться в коробке 20 передач. Это означает, что система обеспечивает переключение передачи, когда частота вращения двигателя 10 переходит через частоту вращения, представленную точкой переключения передач. Следовательно, точки переключения передач могут рассматриваться как предоставляющие информацию не только о том, когда должно происходить переключение на более низкую передачу или переключение на более высокую передачу, но также о числе ступеней передач, которые должны быть пройдены при каждом переключении на более низкую передачу или на более высокую передачу. Каждая точка переключения передач обычно содержит от одной до трех ступеней передач, хотя возможно большее число ступеней.
Фиг.2 показывает пример различных табличных точек переключения передач, показанных посредством линий SP1-SP6 на графике, на котором ось х характеризует крутящий момент двигателя и ось y - частоту вращения двигателя 10 в оборотах в минуту (об/мин). При условии, что текущая частота вращения двигателя находится между линиями SP1 и SP4, не происходит никакого переключения передач, но если текущая частота вращения двигателя переходит через линию переключения на более высокую передачу, то есть SP1-SP3, инициируется переключение на более высокую передачу, и, напротив, инициируется переключение на более низкую передачу, если текущая частота вращения двигателя падает ниже линии переключения на более низкую передачу SP4-SP6.
В нижеприведенной Таблице 1 показано некоторое число ступеней повышающих или понижающих передач для каждой из линий SP1-SP6 на фиг.2. Например, переключение на более высокую передачу на одну степень происходит, если частота вращения двигателя повышается до уровня выше линии SP1, и переключение на более низкую передачу на две ступени происходит, если частота вращения двигателя снижается ниже линии SP5.
Выбор точек переключения передач влияет, среди прочего, на характеристики движения, ускорение, комфорт и потребление топлива для транспортного средства 1, так что точки переключения передач должны быть точно откалиброваны производителями транспортных средств. Данная калибровка, как правило, предусматривает проверку различных стратегий переключения передач в условиях эксплуатации в различных ситуациях при вождении, например при разных величинах используемого ускорения, различных уклонах дороги и разных полных массах транспортных средств. Результаты испытаний должны были быть тщательно проанализированы для определения соответствующих точек переключения передач, что является очень трудоемким, поскольку существует почти бесконечное число комбинаций различных силовых цепей/передач, ситуаций при вождении и масс транспортных средств.
Краткое описание изобретения
Задача изобретения заключается в разработке способа управления коробкой передач, который позволяет полностью или частично решить проблемы, связанные с уровнем техники. Другая задача настоящего изобретения заключается в разработке альтернативного способа управления коробкой передач.
В соответствии с одним аспектом изобретения указанные задачи решаются посредством способа управления коробкой передач, предназначенной для установки в транспортном средстве, при этом способ обеспечивает выполнение переключения коробки передач на более низкую передачу с первой передачи, для которой ускорение а транспортного средства является отрицательным, на вторую передачу, для которой ускорение а является положительным или по существу равным нулю, при этом переключение на более низкую передачу включает, по меньшей мере, одну промежуточную ступень передачи между первой и второй передачами при использовании частоты ωG1 вращения двигателя при движении на первой передаче (G1) в качестве входного параметра при выполнении переключения на более низкую передачу.
Различные варианты осуществления вышеуказанного способа определены в зависимых пунктах формулы изобретения, приложенных к пункту 1 формулы изобретения.
Изобретение также относится к компьютерной программе, которая содержит программный код и которая при выполнении программного кода в компьютере обеспечивает реализацию компьютером указанного способа для управления коробкой передач. Изобретение относится также к компьютерному программному продукту, принадлежащему компьютерной программе.
В соответствии с другим аспектом изобретения указанные задачи решаются посредством системы, предназначенной для управления коробкой передач, при этом система включает в себя, по меньшей мере, одно устройство управления, предназначенное для управления коробкой передач в транспортном средстве, причем система выполнена с возможностью осуществления переключения коробки передач на более низкую передачу с первой передачи, для которой ускорение а транспортного средства является отрицательным, на вторую передачу, для которой ускорение а является положительным или равным нулю, при этом переключение на более низкую передачу включает, по меньшей мере, одну промежуточную ступень передачи между первой и второй передачами при использовании частоты ωG1 вращения двигателя при движении на первой передаче (G1) в качестве входного параметра при выполнении переключения на более низкую передачу.
Система в соответствии с изобретением также может быть модифицирована в соответствии с разными вариантами осуществления вышеуказанного способа. Изобретение также относится к транспортному средству, содержащему, по меньшей мере, одну систему, подобную вышеуказанной.
Преимущество настоящего изобретения заключается в том, что поскольку переключение на более низкую передачу в соответствии с изобретением базируется на частоте вращения двигателя, которую транспортное средство 1 имело, когда оно начало подъем, то есть частоте ωG1 вращения двигателя, которую транспортное средство имело, когда оно перешло в состояние дефицита мощности, точки переключения передач автоматически регулируются для обеспечения одинакового поведения для разных силовых цепей. По этой причине калибровка точек переключения передач не связана с разными типами двигателей или силовых цепей/передач, а связана только с разными режимами движения, например с экономичным режимом или мощностным режимом. Преимущество данной процедуры заключается в том, что время не требуется учитывать при калибровке в отношении разных типов силовых цепей или двигателей 10, что обеспечивает возможность вместо этого сконцентрироваться на калибровке общего режима для каждого типа транспортного средства 1, в результате чего экономится время и уменьшаются затраты, связанные с калибровкой.
Другое преимущество изобретения заключается в том, что в том случае, если водитель сам выполняет переключение на более низкую передачу вручную перед холмом или на холме, система переключения передач в соответствии с изобретением будет воспринимать частоту вращения двигателя, увеличенную водителем, так же, как если бы сама система осуществила резкое переключение на более низкую передачу. Соответственно, система будет продолжать переключать передачи резко на всем пути вверх по холму. Это облегчает для водителя управление тем, как выполняется подъем на холм, поскольку большое значение частоты ωG1вращения двигателя для первой передачи G1 приводит к более «решительному» подъему на холм, чем при более низком значении частоты ωG1вращения двигателя для первой передачи G1.
Дополнительные преимущества и применения способа и системы в соответствии с изобретением указаны в подробном описании, приведенном ниже.
Краткое описание чертежей
Настоящее изобретение описано со ссылкой на приложенные чертежи, на которых:
фиг.1 - схематический вид части силовой цепи для транспортного средства;
фиг.2 - график, показывающий линии переключения на более низкие передачи и более высокие передачи;
фиг.3 - блок-схема варианта осуществления изобретения;
фиг.4 - пример переключения на более низкую передачу с первой передачи G1 на вторую передачу G2 в соответствии с изобретением; и
фиг.5 - устройство управления, образующее часть системы в соответствии с изобретением.
Подробное описание изобретения
Обычные системы переключения передач, описанные выше, обеспечивают выбор передач в соответствии с преобладающими условиями эксплуатации с использованием фиксированных точек переключения передач, подобных показанным на фиг.2. Если транспортное средство 1, например, начинает подъем, и используемая в данный момент передача не подходит, поскольку транспортное средство 1 теряет скорость на подъеме, система переключения передач должна будет выбрать другую передачу для движения транспортного средства 1.
Проблема в данной ситуации заключается в выборе передачи, которая обеспечивает низкий расход топлива, но также обеспечивает движение двигателя 10 со скоростью, которая обеспечивает выходную мощность, достаточную для того, чтобы водитель ощутил, что транспортное средство 1 является мощным на всей протяженности подъема на холм. Термин «мощный» в данном случае означает, что частота вращения двигателя 10 близка к частоте вращения при максимальной выходной мощности.
Поскольку транспортные средства 1 могут иметь разные технические характеристики, например передаточное число коробки передач, передаточное число заднего моста и радиус колеса, одна и та же скорость транспортного средства может быть достигнута при разных частотах вращения двигателя для транспортных средств 1 с разными техническими характеристиками. Это делает использование фиксированных точек переключения передач проблематичным вследствие того, что они могут соответствовать определенным техническим характеристикам транспортных средств, но не другим. Проблема такого же типа также может возникать, если, например, один радиус колеса транспортного средства 1 изменяется на другой, что приводит к другому общему передаточному числу.
Следовательно, ситуация, которая может возникать, когда транспортное средство 1 движется в гору, заключается в том, что переключение на более низкую передачу может происходить слишком рано или слишком поздно, поскольку фиксированные точки переключения передач не будут соответствовать определенной технической характеристике транспортного средства. Слишком раннее переключение на более низкую передачу может вызвать ощущение «нервозности» транспортного средства 1, то есть слишком частое переключение передач и нестабильность, наряду с увеличенным расходом топлива. Слишком позднее переключение на более низкую передачу означает, что выходная мощность двигателя 10 не будет использована оптимальным образом, поскольку транспортное средство 1 теряет больше скорости, чем необходимо.
Следовательно, настоящее изобретение относится к способу, который обеспечивает реализацию стратегии переключения передач для коробки 20 передач и который позволяет полностью или частично устранить недостатки уровня техники. Коробка 20 передач предпочтительно представляет собой коробку передач такого типа, которая образует часть автоматизированной системы переключения передач, управляемой устройством 110 управления (электронным устройством управления). В подобной системе операции переключения передач выполняются автоматически посредством устройства 110 управления, но также обычной практикой является то, что водитель имеет возможность выполнения ручных переключений передач в подобной автоматизированной системе переключения передач, при этом подобная ситуация известна как ручное переключение передач в автоматическом состоянии (автоматическом режиме). Коробка 20 передач также содержит множество передач, например 12 передач переднего хода и одну или несколько передач заднего хода.
Идея способа в соответствии с изобретением состоит в том, что применяется стратегия переключения на более низкую передачу, при этом система переключения передач выполняет переключение с первой передачи G1, для которой ускорение а транспортного средства 1 является отрицательным (передача при дефиците мощности), на вторую более низкую передачу G2, для которой ускорение а транспортного средства 1 является положительным или равно нулю, посредством одной или нескольких ступеней промежуточных передач. В соответствии с настоящим изобретением частота ωG1 вращения двигателя при движении на указанной первой передаче (G1) также используется в качестве входного параметра при выполнении переключения на более низкую передачу. Данная частота ωG1 вращения представляет собой частоту вращения, которую имеет двигатель 10, когда транспортное средство 1 приводится в движение при включенной первой передаче G1.
В соответствии с одним вариантом осуществления изобретения частота ωG1 вращения двигателя предпочтительно представляет собой частоту вращения, которую транспортное средство 1 имеет, когда оно переходит в состояние дефицита мощности при движении на первой передаче G1, например при начале подъема. Это означает, что в соответствии с другим вариантом осуществления изобретения самая высокая частота вращения двигателя при движении на первой передаче G1 будет представлять собой частоту ωG1 вращения, и она может рассматриваться как частота вращения двигателя, при которой соответствующая движущая сила при движении на первой передаче G1 становится меньше соответствующего сопротивления движению на той же передаче. Фиг.4 показывает пример частоты ωG1 вращения двигателя.
Выражения «отрицательное» и «положительное или равное нулю» в данном описании должны восприниматься как означающие соответственно в основном «отрицательное» и в основном «положительное или равное нулю». Причина заключается в том, что ускорение а транспортного средства 1 может мгновенно принимать значение, которое является «положительным или равным нулю» для первой передачи G1, но ускорение а, усредненное за некоторый промежуток времени, тем не менее, может быть отрицательным. Как будет понятно специалистам, то же самое также применимо в отношении ускорения а транспортного средства при движении с включенной второй передачей G2.
Выражение «передача при дефиците мощности» в данном описании означает передачу с таким передаточным отношением, при котором транспортное средство 1 не имеет мощности привода, достаточной для поддержания постоянной скорости при движении на данной передаче. Выражение «передача при равновесии мощности» означает самую высокую передачу, при которой транспортное средство 1 может сохранить постоянную скорость, то есть транспортное средство 1 находится в состоянии равновесия мощности. Следует отметить, что отрицательное ускорение а при движении на первой передаче G1 обусловлено тем, что двигатель 10 не может обеспечить достаточную мощность при движении на первой передаче G1, что приводит к дефициту мощности.
В соответствии с одним вариантом осуществления изобретения самая высокая частота вращения двигателя при каждой промежуточной ступени такая же высокая, как самая высокая частота вращения двигателя при предыдущей промежуточной ступени/передаче, или выше, чем самая высокая частота вращения двигателя при предыдущей промежуточной ступени/передаче. Частота вращения двигателя для каждой промежуточной ступени/передачи находится, например, в диапазоне 1000-2500 об/мин для грузовых транспортных средств и автобусов.
В соответствии с дополнительным вариантом осуществления изобретения самая высокая частота вращения двигателя при каждой промежуточной ступени/передаче такая же высокая, как самая высокая частота вращения двигателя при предыдущей промежуточной ступени/передаче, или выше, чем самая высокая частота вращения двигателя при предыдущей промежуточной ступени/передаче.
В соответствии с другим вариантом осуществления изобретения самая высокая частота вращения двигателя при каждой промежуточной ступени передачи увеличивается на значение pi параметра. Взаимосвязь между самой высокой частотой вращения двигателя при промежуточной ступени и самой высокой частотой вращения двигателя при предыдущей промежуточной ступени предпочтительно такова ωi+1T=ωiT+pi, где ωi+1T - самая высокая частота вращения двигателя при промежуточной ступени и ωiT - самая высокая частота вращения двигателя при предыдущей промежуточной ступени.
Таким образом, частота ωiT вращения двигателя при промежуточной ступени передачи представляет собой самую высокую частоту вращения двигателя, которую имело транспортное средство 1 с того момента, как ускорение а стало отрицательным, то есть самую высокую частоту вращения двигателя, которую имело транспортное средство 1 с того момента, как он перешел в состояние дефицита мощности. Частота ωiT вращения двигателя может рассматриваться как заданная частота вращения, которую система переключения передач пытается достичь после каждой промежуточной ступени при переключении на более низкую передачу в соответствии с данным вариантом осуществления изобретения.
Значение pi параметра также можно рассматривать как значение допуска, поскольку частота вращения двигателя после каждого переключения передач может отклоняться от смоделированной частоты вращения. Абсолютная величина значения pi допуска также может варьироваться для установления того, как быстро указанная частота ωiT вращения двигателя должна увеличиваться, например, для разных режимов движения, таких как экономичный режим или мощностный режим. Также следует отметить, что значение pi параметра необязательно должно быть постоянным, но может быть переменным и может принимать разные значения для разных передач.
В соответствии с дополнительным вариантом осуществления изобретения ускорение а является нулевым или по существу нулевым для второй передачи G2. Ускорение а, выраженное, например, в м/с2 или об/мин/с, для второй передачи G2 можно сравнить с пороговым значением А для проверки того, выполняется ли условие, в соответствии с которым ускорение а является положительным или равным нулю. Ускорение а также может сравниваться с данным пороговым значением А во время определенного промежутка времени для избежания мгновенных отклонений ускорения а, которые могут приводить к некорректности при сравнении. Проверка значения ускорения а для второй передачи также может быть выполнена посредством сравнения рассчитанного сопротивления движению с рассчитанной движущей силой для того, чтобы решить, будет ли ускорение а больше нуля или равно нулю при второй передаче G2.
Что касается промежуточных ступеней передач в способе по настоящему изобретению, существует возможность того, что одна или несколько из них будут предусмотрены между первой передачей G1 и второй передачей G2 в соответствии с одним вариантом осуществления изобретения. Кроме того, число ступеней между первой передачей G1 и промежуточной ступенью и/или между двумя следующими друг за другом промежуточными ступенями, и/или между промежуточной ступенью и второй передачей G2 может быть равно единице или может быть большим.
В соответствии с предпочтительным вариантом осуществления изобретения время, в течение которого сохраняется/длится каждая промежуточная ступень передачи, больше порогового значения Ti. Время, в течение которого транспортное средство 1 может двигаться на определенной промежуточной передаче, предпочтительно можно сравнить со специфическим для передачи, калиброванным пороговым значением Ti. Это означает, что если в соответствии с одним вариантом осуществления изобретения промежуточная передача должна рассматриваться как допустимая промежуточная передача между первой передачей G1 и второй передачей G2, транспортное средство 1 должно обладать способностью двигаться на ней в течение времени, по меньшей мере, более продолжительного, чем пороговое значение Ti для данной конкретной передачи.
Причина, по которой нецелесообразно движение транспортного средства 1 в течение слишком короткого времени на промежуточной передаче, заключается в том, что когда происходит переключение передачи в транспортном средстве, в нем происходит потеря мощности, передаваемой от силовой цепи, и, следовательно, транспортное средство будет терять скорость во время реального процесса переключения передач. По этой причине предпочтительно избежание подобной ситуации, поскольку транспортное средство 1 может терять больше скорости, если система переключения передач выберет переключение передачи через посредство промежуточной передачи, чем в том случае, если она пропустит указанную промежуточную передачу и вместо этого включит понижающую передачу через дополнительную одну или несколько ступеней во время переключения на более низкую передачу.
Выполнение переключения на более низкую передачу и последующее движение на получающейся в результате передаче в течение слишком короткого времени также вызывают дискомфорт у водителя и каких-либо пассажиров, так что система переключения передач может использовать специфические для передачи, калиброванные значения Ti, как описано выше. Данные калиброванные пороговые значения Ti также определяют, насколько вероятно то, что система пропустит или не пропустит промежуточную передачу при расчете переключения на более низкую передачу с первой передачи G1 на вторую передачу G2. Чем больше значение, принятое в качестве специфического для передачи, калиброванного порогового значения Ti, тем более вероятно то, что система пропустит промежуточную передачу, в то время как чем меньше значение, принятое в качестве порогового значения Ti, тем менее вероятно то, что система пропустит промежуточную передачу. Соответственно, пороговое значение Ti может быть использовано в качестве параметра для определения числа ступеней передач при каждой промежуточной ступени и/или для определения числа промежуточных ступеней между первой передачей G1 и второй передачей G2 в соответствии с разными вариантами осуществления изобретения.
Значения времени для специфических для передачи пороговых значений Ti предпочтительно могут принимать значение от 1 до 15 секунд для тяжелых транспортных средств 1, например грузовых транспортных средств и автобусов, в зависимости от поведения, желательного во время переключения на более низкую передачу, например, от скорости переключения на более низкую передачу и ритма переключения на более низкую передачу. Следовательно, пороговые значения Ti могут быть использованы в качестве расчетных параметров при конфигурировании различных вариантов поведения системы переключения передач при переключении на более низкую передачу, поскольку пороговые значения Ti будут определять число промежуточных ступеней и число ступеней передачи при каждой промежуточной ступени, как описано выше.
В соответствии с еще одним вариантом осуществления изобретения текущая промежуточная ступень передачи длится/сохраняется в течение того же времени, что и непосредственно следующая за ней промежуточная ступень, поскольку в этом случае переключение на более низкую передачу будет ощущаться большинством водителей как последовательное и четкое. Причина состоит в том, что водители, как правило, не хотят, чтобы система переключения передач выполняла произвольные переключения передач по типу «немного сюда и немного туда», которые он/она может счесть «нервными» и произвольными. «То же время» в данном контексте означает, что соответствующие времена имеют приблизительно одинаковую продолжительность.
В соответствии с еще одним предпочтительным вариантом осуществления изобретения переключение передачи при промежуточной ступени передачи происходит при более высокой частоте вращения двигателя, чем при предыдущей промежуточной ступени, что означает, что частота вращения двигателя при переключениях передач увеличивается для каждой промежуточной ступени. При использовании данного варианта осуществления водитель ощущает, что транспортное средство 1 является мощным и что он «принимается за дело» решительно, например на подъеме, поскольку он будет двигаться больше при максимальной выходной мощности двигателя 10 при каждой последующей промежуточной передаче во время переключения на более низкую передачу. При условии, что его скорость при максимальной выходной мощности не будет превышена (часто приблизительно 1800 об/мин для грузовых транспортных средств), более высокая частота вращения двигателя будет означать, что двигатель 10 будет выдавать большую выходную мощность. Таким образом, двигатель 10 становится тем более мощным и ощущается как тем более мощный, чем выше частота вращения двигателя, при которой транспортное средство 1 приводится в движение.
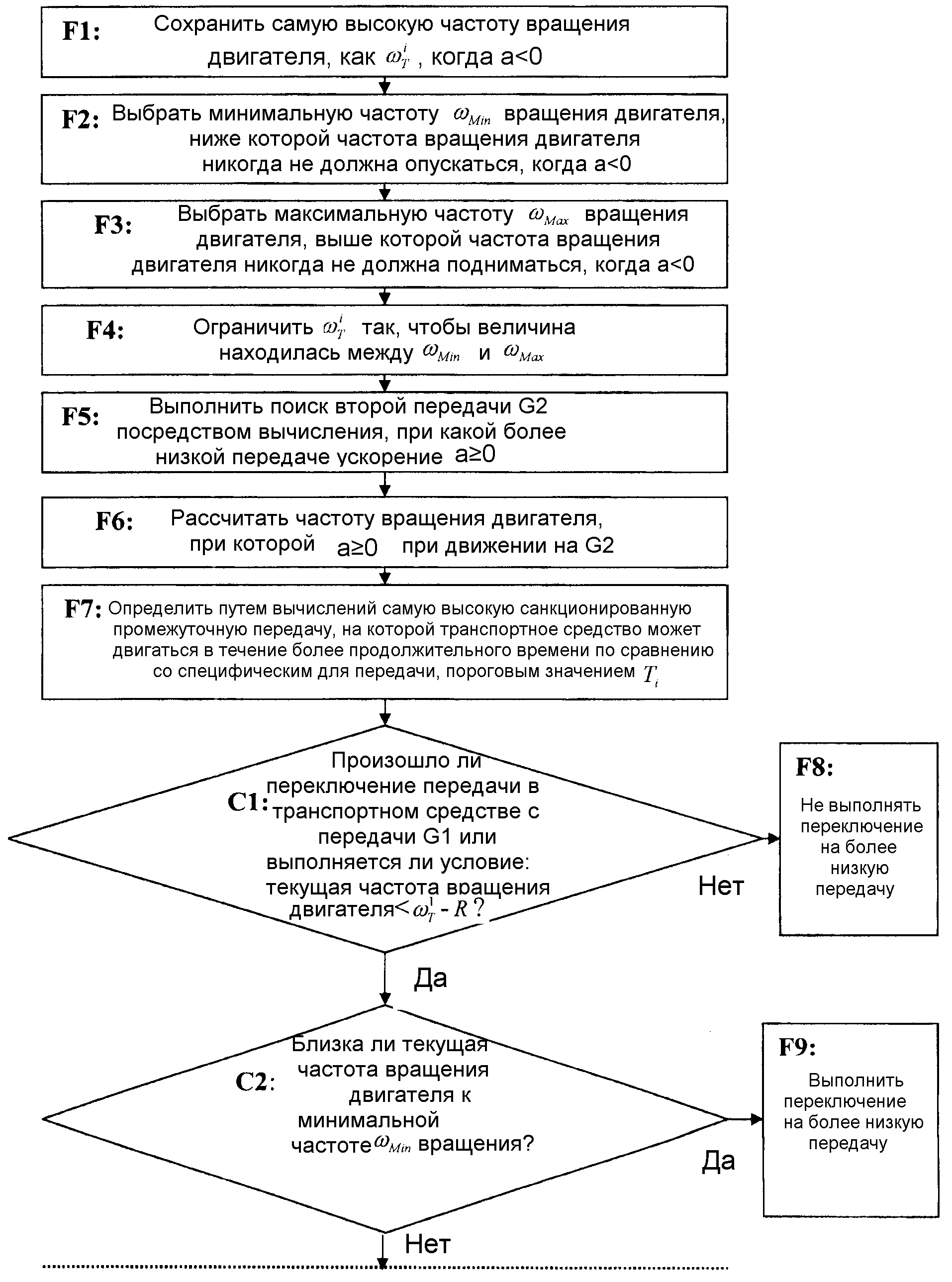
Фиг.3 представляет собой блок-схему приведенного в качестве примера варианта осуществления способа в соответствии с настоящим изобретением. Предполагается, что данный процесс непрерывно оценивается системой переключения передач всякий раз, когда транспортное средство 1 оказывается в состоянии дефицита мощности, что означает, что система оценивает, должно ли быть выполнено переключение передач или нет, начиная от шага F1 через заданные промежутки времени.
На шаге F1 выполняется проверка того, превышает ли текущая частота вращения двигателя самую высокую частоту вращения двигателя, которую транспортное средство 1 имело с того момента, когда он оказался в состоянии дефицита мощности, то есть а<0. Если это так, данная текущая частота вращения двигателя сохраняется как первая самая высокая частота ωiT, предназначенная для использования в качестве базисной частоты вращения в процессе переключения передач.
На шаге F2 выбирается соответствующая минимальная частота ωMin вращения двигателя, ниже которой частота вращения двигателя не должна опускаться, когда ускорение а является отрицательным (то есть когда транспортное средство 1 находится в состоянии дефицита мощности), в зависимости, среди прочего, от того, как быстро транспортное средство 1 теряет скорость, от производной уклона дороги и режима движения, используемого транспортного средства 1. Например, более низкая минимальная частота ωMin вращения двигателя выбирается, если производная уклона дороги уменьшается, то есть когда транспортное средство приближается к вершине холма. Минимальная частота ωMin вращения предпочтительно также выбирается такой, что текущая частота вращения двигателя никогда не будет опускаться ниже кривой максимального крутящего момента двигателя 10 для гарантирования того, что двигатель будет обеспечивать достаточную выходную мощность в течение всего процесса переключения на более низкую передачу, и такой, чтобы избежать некомфортных вибраций, вызываемых силовой цепью.
На шаге F3 выбирается соответствующая максимальная частота ωMax вращения двигателя, определяемая как частота вращения, которая не должна быть превышена во время процесса переключения передач, когда а<0. Данная максимальная частота ωMax вращения может быть связана, например, с расходом топлива и/или заданной выходной мощностью. Для тяжелых транспортных средств 1/транспортных средств 1 большой грузоподъемности данная максимальная частота ωMax вращения может составлять, например, 1600 об/мин для гарантирования того, что расход топлива не будет слишком большим, или 2100 об/мин, если в качестве приоритета выбрана максимальная выходная мощность. Таким образом, следует понимать, что указанная максимальная частота ωMax вращения может зависеть от режима, в котором движется транспортное средство.
На шаге F4 осуществляется ограничение частоты ωiT вращения двигателя так, чтобы она принимала значение в пределах диапазона, ограниченного минимальной частотой ωMin вращения и максимальной частотой ωMax вращения. Таким образом, частота ωiT вращения может быть задана равной минимальной частоте ωMin вращения (ωiT=ωMin), если ωiT принимает значение ниже указанного диапазона, и равной максимальной частоте ωMax вращения (ωiT=ωMax), если ωiT принимает значение вышеуказанного диапазона.
На шаге F5 выполняется поиск второй передачи G2 посредством вычисления того, на какую из возможных имеющихся более низких передач транспортное средство 1 должно переключиться для гарантирования того, что ускорение а будет больше или равно нулю при движении на данной передаче, то есть а≥0. Определение второй передачи G2 путем расчета осуществляется системой переключения передач, проверяющей, при какой более низкой передаче мощность транспортного средства 1, расходуемая на движение, превысит рассчитанное сопротивление движению, то есть суммарное усилие, действующее на транспортное средство 1 в направлении, противоположном направлению его движения. По чисто практическим соображениям вторая передача G2 может быть определена путем вычислений системой, выполняющей пошаговое вычисление максимальной движущей силы транспортного средства для передач, более низких, чем первая передача G1, и выбирающей первую более низкую передачу - если вычисление выполняется пошагово от самой высокой до самой низкой передачи - которая обеспечивает максимальную движущую силу, такую же, как рассчитанное сопротивление движению транспортного средства 1, или превышающую рассчитанное сопротивление движению транспортного средства 1.
На шаге F6 после этого рассчитывается частота вращения двигателя на второй передаче G2, при которой движущая сила транспортного средства 1 будет больше или равна сопротивлению его движению (а≥0), чтобы обеспечить возможность принятия решения относительно того, когда переключение на более низкую вторую передачу G2 должно быть выполнено, чтобы гарантировать то, что частота вращения двигателя после переключения на более низкую вторую передачу G2 будет близка к равновесной частоте вращения непосредственно после переключения на более низкую передачу, при этом равновесная частота вращения - это та частота, при которой ускорение транспортного средства 1 по существу нулевое.
На шаге F7 выполняется вычисление того, как долго транспортное средство 1 может двигаться на каждой из промежуточных передач, если имеется их некоторое число между первой передачей G1 и второй передачей G2. Время, в течение которого транспортное средство 1 может двигаться на каждой промежуточной передаче, сравнивается со специфическим для передачи калиброванным значением времени, то есть с пороговым значением Ti для каждой промежуточной передачи. Данные сравнения обеспечивают основу для выбора самой высокой промежуточной передачи из допустимых промежуточных передач, то есть передач, которые имеют рассчитанное значение времени, превышающее соответствующее им пороговое значение Ti. Следует отметить, что передача, выбранная на шаге F7, представляет собой вторую передачу G2, если никакая более высокая передача не удовлетворяет вышеуказанным требованиям.
Кроме того, на шаге С1 выполняется проверка при переключениях передач с первой передачи G1, чтобы установить, снизилась ли частота вращения двигателя 10 больше чем на калиброванное предельное значение R с самой высокой частоты ωG1 вращения двигателя, которую транспортное средство 1 имело, когда оно перешло в состояние дефицита мощности. Предельное значение R может варьироваться в зависимости от режима движения, например, экономичного режима или мощностного режима. Только в том случае, если частота вращения двигателя снизится больше чем на калиброванное предельное значение R (предпочтительно 1-100 об/мин), переключение на более низкую передачу будет допустимым. Данное предельное значение R используется в процессе так, что транспортное средство 1 не будет восприниматься как «нервное» или неустойчивое, например при начале подъема на холм, поскольку в противном случае переключение на более низкую передачу могло бы быть выполнено, как только это позволит уклон дороги. Данную проверку на шаге С1 необязательно выполнять с промежуточных передач, поскольку в этом случае транспортное средство уже будет на холме, что означает, что проверка на шаге С1 уместна только при переключении с первой передачи G1.
На шаге F8 не происходит никакого переключения на более низкую передачу, если проверка на шаге С1 покажет, что частота вращения двигателя не снизилась больше чем на предельное значение R. Это делается для того, чтобы предотвратить переключение передачи системой, когда сопротивление движению временно возрастает, например на коротких холмах, что заставило бы транспортное средство 1 «нервничать».
На шаге С2 выполняется проверка того, близка ли текущая частота вращения двигателя к минимальной частоте ωMin вращения, и если это условие выполняется, на шаге F9 выполняется немедленное переключение на более низкую передачу, выбранную на шаге F7, поскольку в этом случае будет существовать риск того, что частота вращения двигателя снизится ниже минимальной частоты ωMin вращения.
Если указанное условие не выполняется, на шаге F10 выполняется прогнозирование частоты вращения двигателя, которую транспортное средство 1 будет иметь после переключения на более низкую передачу, выбранную на шаге F7, то есть ωi+1T, если текущая частота вращения двигателя на шаге С2 не ниже минимальной частоты ωMin вращения.
После этого на шаге С3 проверяется, меньше ли текущая частота ωi+1T вращения двигателя, спрогнозированная на шаге F10, величины ωiT+pi, которая представляет собой самую высокую частоту вращения, которую имел двигатель 10 с того момента, как он перешел в состояние дефицита мощности, и величину pi допуска в соответствии с ωi+1T=ωiT+pi, i=1, 2, 3…, как описано выше. Следует отметить, что в соответствии с данным вариантом осуществления изобретения первая самая высокая частота ω1T вращения двигателя такая же, как самая высокая частота вращения при движении на первой передаче G1, то есть ω1T=ωG1 (см. шаг F1). Следовательно, самая высокая частота вращения двигателя при движении на первой передаче G1 будет влиять на весь процесс переключения на более низкую передачу и, таким образом, служить в качестве входного параметра для него.
На шаге F11 выполняется переключение на более низкую передачу, выбранную на шаге F7, если проверка на шаге С3 показывает, что текущая частота вращения двигателя находится в пределах диапазона I.
Если это условие не выполняется, на шаге F12 выполняется расчет времени, в течение которого коробка 20 передач может работать на передаче, выбранной на шаге F7. При практическом применении система переключения передач рассчитывает, сколько времени транспортное средство 1 может двигаться на каждой промежуточной передаче от первой передачи G1 до второй передачи G2, и после этого выбирает самую высокую из данных промежуточных передач, которая соответствует требованию, заключающемуся в том, что рассчитанное для нее значение времени должно быть больше, чем специфическое для данной передачи калиброванное пороговое значение Ti.
При расчете времени, в течение которого транспортное средство 1 может двигаться на промежуточной передаче, система может использовать минимальную частоту ωMin вращения, которая представляет собой самую низкую частоту вращения двигателя, ниже которой частота вращения двигателя не должна опускаться в транспортном средстве 1, так что, если текущая частота вращения снизится до величины, которая ниже, например, ωMin=1100 об/мин, система должна выполнить переключение на более низкую передачу. В этом случае система вычисляет время, в течение которого транспортное средство 1 может двигаться на промежуточной передаче, исходя из частоты вращения двигателя, при которой система находится после переключения передачи, до тех пор пока система не достигнет минимальной частоты вращения, то есть ωMin=1100 об/мин. Следовательно, система вычисляет, сколько времени транспортное средство 1 сможет двигаться на промежуточной передаче посредством вычисления того, насколько быстро двигатель 10 будет терять частоту вращения на промежуточной передаче, исходя из информации о его минимальной частоте ωMin вращения и о том, какой будет его частота вращения после переключения передачи.
В завершение, на шаге С4 проверяется, является ли время, рассчитанное на шаге F12, таким же продолжительным, как время, в течение которого транспортное средство 1 двигалось на текущей передаче с того момента, как ускорение а стало отрицательным. На шаге F14 выполняется переключение на более низкую передачу, выбранную на шаге F7, если проверка на шаге С4 показывает, что ответ положительный. Если ответ на шаге С4 отрицательный, на шаге F13 не происходит никакого переключения на более низкую передачу.
Фиг.4 показывает пример переключения на более низкую передачу транспортного средства 1 в соответствии с изобретением на графике, на котором ось х характеризует время, а ось y характеризует частоту вращения двигателя 10 в об/мин. В момент времени t1 при движении с включенной первой передачей G1 транспортное средство 1 начинает подъем, так что возникает дефицит мощности и ускорение а двигателя 1 становится отрицательным. В этот момент времени t1 определяется частота ωG1 вращения двигателя при движении на первой передаче G1, и она может быть использована в качестве входного параметра во время переключения на более низкую передачу в соответствии с одним вариантом осуществления изобретения.
Поскольку транспортное средство 1 находится в состоянии дефицита мощности, частота вращения двигателя уменьшается, и первое переключение на более низкую передачу происходит в момент времени t2, что вызывает возврат частоты вращения двигателя к большему значению в момент времени t3. При данной следующей передаче (первой промежуточной передаче) также возникает дефицит мощности, и дополнительное переключение на более низкую передачу, необходимое для обеспечения возможности подъема транспортного средства 1 на холм, происходит в момент времени t4. Таким образом, переключение на более низкую передачу включает одну или несколько промежуточных ступеней передач до тех пор, пока коробка 20 передач не «дойдет» до передачи, соответствующей равновесной мощности, то есть второй передачи G2, в момент времени t7 на фиг.4. При данной второй передаче G2 (от момента времени t8) ускорение а является в основном нулевым, так что транспортное средство 1 может сохранять свою скорость на данной передаче.
Также следует отметить, что самая высокая частота вращения двигателя для каждой промежуточной передачи больше или равна самой высокой частоте вращения с того момента, как транспортное средство 1 перешло в состояние дефицита мощности, то есть с того момента, когда ускорение а стало отрицательным, как показано в моменты времени t3, t4 и t7 на фиг.4. Это выполняется так, что транспортное средство 1 будет сохранять свою скорость при движении в гору настолько хорошо, насколько это возможно, за счет того, что оно будет двигаться на скорости, близкой к той, которая соответствует частоте вращения двигателя 10 при максимальной выходной мощности при движении на промежуточных передачах. Это также означает то, что транспортное средство 1 будет ощущаться/восприниматься как «агрессивное» и мощное на, например, длинных крутых подъемах, если оно движется на высокой скорости, поскольку частота вращения двигателя будет повышаться при каждой ступени переключения на более низкую передачу и, таким образом, приближаться к максимальной частоте вращения двигателя, которую транспортное средство может поддерживать при движении на второй передаче G2. Лучшее поддержание скорости транспортного средства в начале подъема также обеспечивает возможность уменьшения числа ступеней переключения на более низкие передачи, если холм закончится до того, как транспортное средство 1 «достигнет» второй передачи G1.
Также следует отметить, что различные шаги вычислений в способе в соответствии с изобретением выполняются в реальном времени, как будет понятно специалистам. Им также будет понятно то, что способ управления коробкой передач в соответствии с настоящим изобретением также может быть реализован в компьютерной программе, которая при выполнении ее в компьютере обеспечит реализацию способа посредством компьютера. Компьютерная программа содержится на машиночитаемом носителе компьютерного программного продукта, который принимает форму соответствующего запоминающего устройства, например ПЗУ (постоянного запоминающего устройства), ППЗУ (программируемого постоянного запоминающего устройства), СППЗУ (стираемого ППЗУ), флэш-памяти, ЭСППЗУ (электрически стираемого ППЗУ), жесткого диска и т.д.
Настоящее изобретение также относится к системе управления коробкой передач. Система включает в себя, по меньшей мере, одно устройство 110 управления, предназначенное для управления коробкой 20 передач в транспортном средстве 1, и выполнена с возможностью осуществления переключения на более низкую передачу с первой передачи G1, для которой ускорение а является отрицательным, на вторую передачу G2, для которой ускорение а является положительным или равным нулю. Переключение на более низкую передачу включает, по меньшей мере, одну промежуточную ступень передачи между первой передачей G1 и второй передачей G2, и частота ωG1 вращения двигателя при движении на указанной первой передаче (G1) используется в качестве входного параметра при выполнении переключения на более низкую передачу.
Система, описанная выше, также может быть модифицирована в соответствии с различными вариантами осуществления вышеуказанного способа. Настоящее изобретение также относится к транспортному средству 1, например к грузовому транспортному средству или автобусу, которое содержит, по меньшей мере, одну систему, подобную описанной выше.
Фиг.5 схематически показывает устройство 110 управления, образующее часть системы в соответствии с изобретением. Устройство 110 управления содержит вычислительный блок 111, который может принимать форму процессора или микрокомпьютера по существу любого пригодного типа, например, схемы для цифровой обработки сигналов (процессора для цифровой обработки сигналов, ЦОС) или схемы с заданной определенной функцией (проблемно-ориентированной (специализированной) интегральной микросхемы, ASIC). Вычислительный блок 111 соединен с запоминающим устройством 112, которое включено в устройство 110 управления и которое передает в вычислительный блок 111, например, хранимый программный код и/или хранимые данные, которые необходимы вычислительному блоку 111 для обеспечения возможности выполнения вычислений. Вычислительный блок 111 также выполнен с возможностью сохранения частичных или конечных результатов вычислений в запоминающем устройстве 112.
Кроме того, устройство 110 управления предусмотрено с устройствами 113, 114, 115, 116, соответственно предназначенными для приема входных сигналов и передачи выходных сигналов. Данные входные и выходные сигналы могут содержать колебательные сигналы, импульсы или другие атрибуты, которые устройства 113, 116 для приема сигналов могут определять как информацию и которые могут быть преобразованы в сигналы, которые могут быть обработаны вычислительным блоком 111. При этом данные сигналы могут подаваться в вычислительный блок 111. Устройства 114, 115 для передачи сигналов выполнены с возможностью преобразования сигналов, принятых из вычислительного блока 111, для формирования, например посредством модуляции сигналов, выходных сигналов, которые могут быть переданы другим частям системы для определения моментов переключения на более низкую передачу и переключения на более высокую передачу. Специалисту в данной области техники будет понятно, что вышеуказанный компьютер может принимать вид вычислительного блока 111 и что вышеуказанное запоминающее устройство может принимать вид запоминающего устройства 112.
Каждое из соединений с устройствами, соответственно предназначенными для приема выходных сигналов и передачи выходных сигналов, может принимать форму одного или нескольких из нижеперечисленных устройств: кабеля, шины данных, например шины CAN (шины сети локальных контроллеров), шины MOST (шины передачи медийных данных) или некоторых других конфигураций шин, или беспроводного соединения. Соединения 70, 80, 90, 100 на фиг.1 также могут принимать форму одного или нескольких данных кабелей, шин или беспроводных соединений.
В завершение, настоящее изобретение не ограничено вариантами его осуществления, описанными выше, а относится ко всем вариантам осуществления и включает в себя все варианты осуществления в пределах объема защиты приложенных независимых пунктов формулы изобретения.
Реферат
Группа изобретений относится к способу и системе управления коробкой передач, предназначенной для установки на транспортном средстве, а также к транспортному средству. Способ обеспечивает выполнение переключения коробки передач на более низкую передачу с первой передачи на вторую передачу. Для первой передачи ускорение транспортного средства является отрицательным. Для второй передачи ускорение является положительным или равным нулю. Переключение на более низкую передачу включает промежуточную ступень передачи между первой передачей и второй передачей при использовании частоты вращения двигателя при первой передаче в качестве входного параметра при выполнении переключения на более низкую передачу. Частота вращения двигателя при первой передаче представляет собой частоту вращения двигателя, которую транспортное средство приобретает, когда ускорение становится отрицательным при первой передаче. Система содержит устройство управления, предназначенное для управления коробкой передач на транспортном средстве. Транспортное средство, такое как грузовое транспортное средство или автобус, содержит вышеуказанную систему. Технический результат заключается в оптимальном использовании мощности двигателя при переключении передач. 3 н. и 12 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ управления коробкой передач транспортного средства
Комментарии