Способ и система вождения транспортного средства - RU2514610C2
Код документа: RU2514610C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу вождения транспортного средства. В частности, изобретение относится к способу вождения транспортного средства, в котором коробка передач, присоединенная к двигателю внутреннего сгорания, выполнена с возможностью установки на различные другие передаточные числа в случае наличия пониженной необходимости в выходной мощности для приведения транспортного средства в движение.
Уровень техники
При вождении тяжелых автомобилей, например грузовиков, автобусов и пр., экономичность транспортного средства со временем становится все более существенным фактором рентабельности предприятия, в котором используется транспортное средство. Помимо закупочной стоимости, основные затраты на стандартную эксплуатацию тяжелого транспортного средства обычно складываются из оплаты труда водителя, стоимости ремонта и обслуживания и топлива для приведения транспортного средства в движение.
В зависимости от типа транспортного средства влияние различных факторов может изменяться, но расход топлива, в общем случае, составляет главную статью расхода, и поскольку коэффициент использования оборудования для тяжелых автомобилей часто бывает высоким, что предполагает большой общий расход топлива, любой возможный способ снижения расхода топлива положительно влияет на рентабельность.
На длинных участках пути особенно важно оптимизировать расход топлива. Для этого существуют автомобили для перевозок на большие расстояния, отличающиеся типичными номинальными оборотами двигателя для определенной крейсерской скорости транспортного средства. Типичные крейсерские скорости транспортного средства, в зависимости от региона или типа дороги, могут составлять, например, 80 км/ч, 85 км/ч или 89 км/ч.
Для тяжелых автомобилей в целом доступны различные другие конфигурации трансмиссии, но поскольку часто бывает желательно, чтобы вождение таких автомобилей было максимально комфортным для водителя, их часто оборудуют автоматическими коробками передач, так что переключения передач осуществляются под управлением системы управления, обычно встроенной в транспортное средство.
Тот факт, что системы автоматического переключения передач в тяжелых транспортных средствах обычно действуют под управлением системы управления, позволяет возможность, которая часто применяется, использовать устройство управления, благодаря которому управление двигателем и коробкой передач осуществляют частично на основании команд от водителя транспортного средства, но также в большой степени системой управления. По этой причине, система управления часто также реализует функции для улучшения расхода топлива за счет, по возможности, осуществления переключений передач и выбора передачи в максимально экономичном с точки зрения расхода топлива режиме.
Примером такой функции является функция, благодаря которой, когда транспортное средство находится на спуске, его двигатель отключается от его ведущих колес, когда сообщение крутящего момента не требуется для поддержания скорости транспортного средства. Затем соединение с трансмиссией транспортного средства возобновляется, когда, например, водитель нажимает на педаль акселератора или педаль тормоза.
Хотя выше функция отсоединения может хорошо работать во многих случаях, все же возможны ситуации, когда расход топлива автомобилей, приводимых в движение двигателем внутреннего сгорания, можно еще больше сократить.
Раскрытие изобретения
Задачей настоящего изобретения является создание способа управления коробкой передач транспортного средства, который позволяет снизить его расход топлива. Эта задача решается посредством способа по п.1.
Настоящее изобретение относится к способу вождения транспортного средства, в котором коробка передач, присоединенная к двигателю внутреннего сгорания, выполнена с возможностью установки на различные другие передаточные числа и допускает установку на низкое передаточное число, при котором обороты двигателя ниже оборотов, при которых для низкого передаточного числа достигается горизонтальный участок кривой крутящего момента. Транспортное средство выполнено с возможностью вождения в первом режиме и втором режиме при низком передаточном числе, так что в первом режиме вождение транспортного средства осуществляется без подачи топлива на указанный двигатель, а во втором режиме указанный двигатель обеспечивается подачей топлива для создания движущей силы для приведения транспортного средства в движение. Способ включает определение, следует ли вести транспортное средство согласно первому режиму или второму режиму, на основании необходимости в движущей силе.
Это обеспечивает преимущество в том, что транспортное средство можно вести на повышающей передаче двумя разными способами. В первом режиме вождение транспортного средства осуществляется с торможением двигателем, т.е. без подачи топлива в двигатель и, следовательно, без расхода топлива. Это обеспечивает преимущество в том, что транспортное средство можно вести, например, по нисходящему участку пути без расхода топлива, и при этом низкие обороты двигателя благодаря повышающей передаче приводят к тому, что к ведущим валам транспортного средства прилагается низкий тормозной момент двигателя.
В качестве альтернативы, во втором режиме двигатель может добавлять надлежащую движущую силу к (пониженной) движущей силе (выходной мощности), которую он может развивать на своих оборотах в данный момент времени, чтобы, таким образом, повысить степень использования повышающей передачи, что позволяет вести транспортное средство с включенной повышающей передачей дольше, чем с торможением двигателем, прежде чем потребуется перейти к более низкой передаче (более высокому передаточному числу). Например, транспортное средство можно вести с включенной повышающей передачей на спуске, что приводит к пониженной необходимости в выходной мощности, но на которой требуется добавление от двигателя для поддержания скорости транспортного средства, или транспортное средство можно вести как можно дольше, пока его скорость не станет слишком сильно отличаться от опорной скорости, например скорости, установленной устройством круиз-контроля, или какой-либо другой скорости, указанной в системе управления транспортного средства.
Определение, следует ли вести транспортное средство с включенной повышающей передачей согласно первому режиму или второму режиму, осуществляют путем определения необходимости в движущей силе, и переключение на низкое передаточное число может производиться на основании необходимости в движущей силе, например, когда необходимость в движущей силе снижена или будет снижена в течение первого времени. Транспортное средство, ведомое, например, на спуске, испытывает сниженную необходимость в движущей силе (выходной мощности) для приведения его в движение, поскольку сила земного притяжения добавляет прямую составляющую движущей силы, благодаря чему необходимость в движущей силе от двигателя транспортного средства для приведения транспортного средства в движение может снижаться или даже совсем исчезать.
Определение может производиться при осуществлении вождения транспортного средства или при необходимости вождения на низком передаточном числе. Определение необходимости в движущей силе и определение, следует ли вести транспортное средство согласно первому режиму или второму режиму, может производиться средством определения, содержащим по меньшей мере один блок управления, составляющий часть системы управления транспортного средства.
Согласно варианту осуществления, необходимость в движущей силе определяется путем определения сопротивления движению для транспортного средства. Сопротивление движению является полным представлением результирующей сил, действующих на транспортное средство в ходе эксплуатации, и может вычисляться на основании известной скорости транспортного средства, движущего крутящего момента двигателя, конфигурации транспортного средства и других внешних данных. Сопротивление движению можно использовать в качестве представления уклона дороги.
Транспортное средство можно вести, например, согласно первому режиму, если абсолютная величина его сопротивления движению ниже первого значения, и согласно второму режиму, если абсолютное значение его сопротивления движению ниже второго значения, причем первое значение, возможно, ниже второго значения.
Согласно варианту осуществления, необходимость в движущей силе определяется путем определения скоростного параметра. Скоростной параметр может, например, принимать форму определения скорости, которой транспортное средство достигнет в определенной точке на спуске, или наивысшей скорости, которой он достигнет, например, на спуске. Расчет этой скорости позволяет определять подходящие режимы вождения транспортного средства. Ожидаемые скорости транспортного средства можно определить, например, на основании данных, касающихся топографии дороги перед транспортным средством.
Определение, следует ли вести транспортное средство согласно первому режиму или второму режиму, может производиться, например, при осуществлении вождения транспортного средства с активированной функцией круиз-контроля, в каковом случае настоящее изобретение можно с преимуществом использовать для вождения транспортного средства в режиме экономии топлива с активированной функцией круиз-контроля.
Дополнительные характеристики настоящего изобретения и его преимущества будут указаны в подробном описании примеров вариантов осуществления, изложенных ниже со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Фиг.1a иллюстрирует трансмиссию в автомобиле, в котором можно с преимуществом использовать настоящее изобретение.
Фиг.1b иллюстрирует пример блока управления в автомобиле система управления.
Фиг.2 представляет собой логическую блок-схему, демонстрирующую пример способа управления коробкой передач согласно примеру варианта осуществления настоящего изобретения.
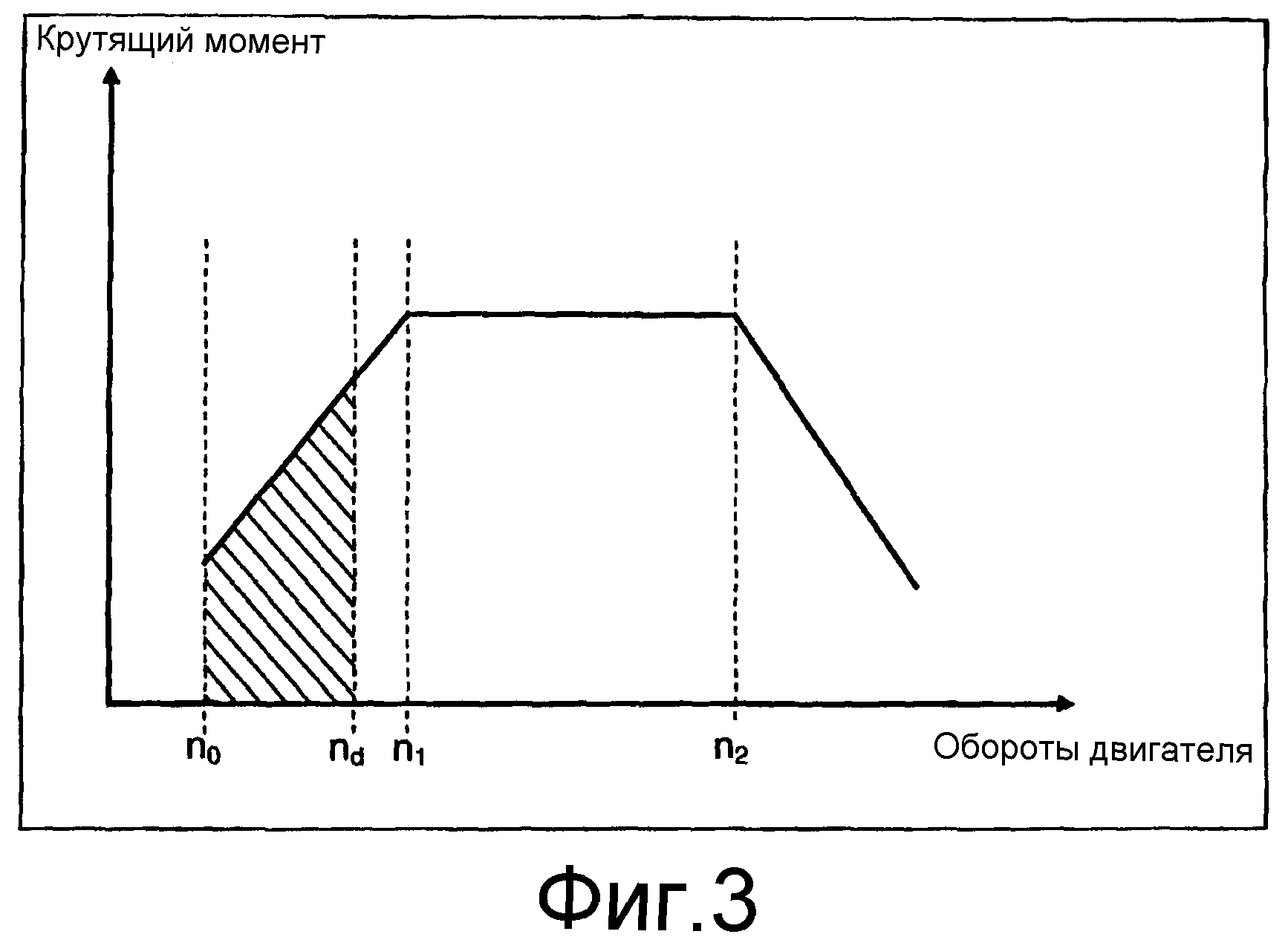
Фиг.3 иллюстрирует кривую крутящего момента для двигателя с указанными пределами рабочего диапазона повышающей передачи.
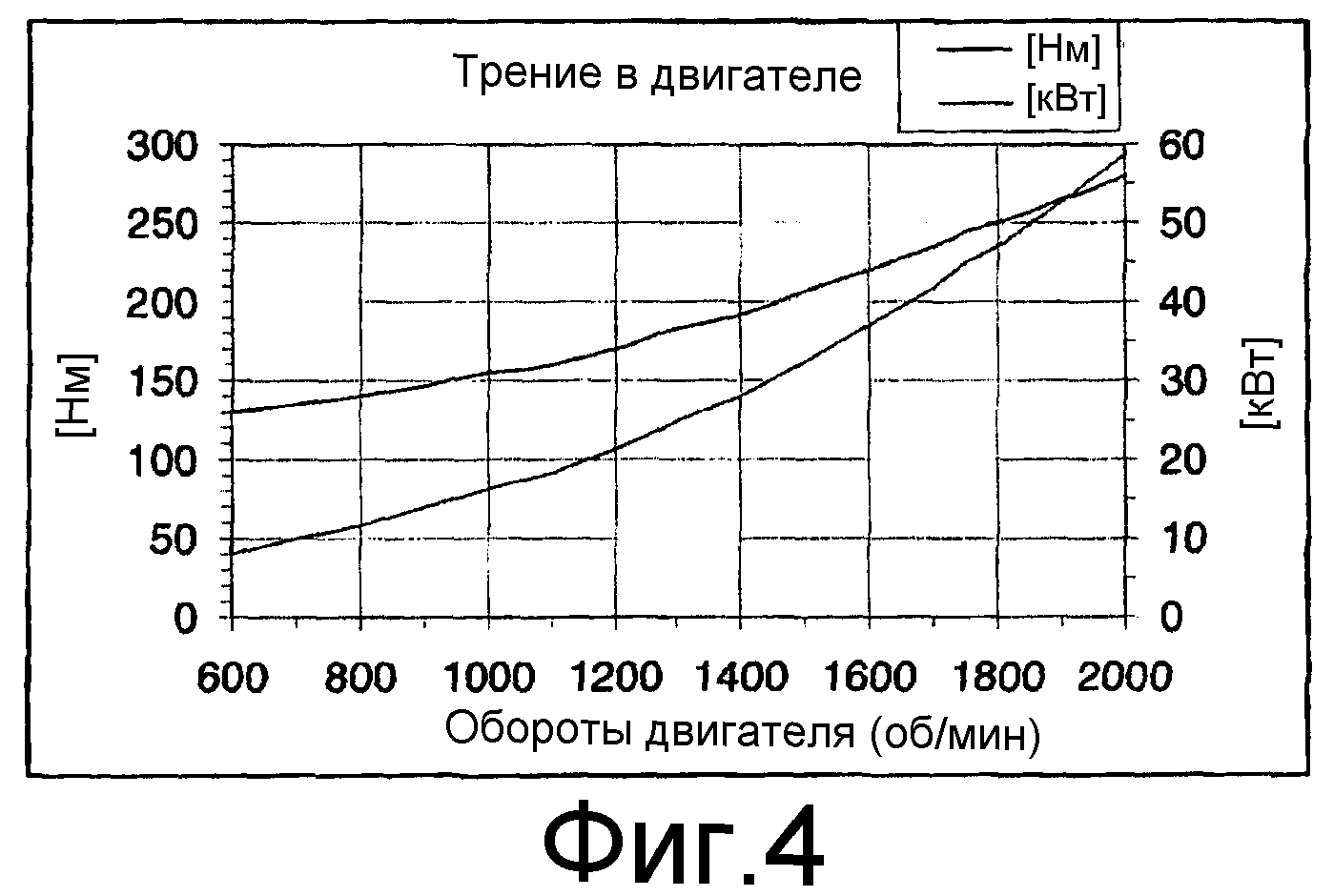
Фиг.4 иллюстрирует потери на трение в двигателе как функцию оборотов двигателя.
Подробное описание вариантов осуществления изобретения
Термин «повышающая передача» обычно понимают в значении передачи, на которой выходной вал коробки передач вращается быстрее, чем вал двигателя.
Однако в нижеследующих описании и формуле изобретения термин «повышающая передача» носит ограниченный характер, обозначая передачу, на которой транспортное средство на своей крейсерской скорости движется при оборотах двигателя, которые ниже оборотов, при которых достигается горизонтальный участок кривой крутящего момента для передачи. Это означает, что на такой передаче максимальный крутящий момент не будет доступен, что делает эту передачу бесполезной за исключением случаев, когда необходимость в движущей силе снижена.
Фиг.1a изображает пример трансмиссии тяжелого транспортного средства 100, например грузовика, автобуса и т.п., согласно примеру варианта осуществления настоящего изобретения. Транспортное средство 100, схематически изображенное на фиг.1a, имеет только один мост с ведущими колесами 113, 114, но изобретение также применимо к транспортным средствам, имеющим более одного моста, снабженного ведущими колесами. Трансмиссия содержит двигатель 101 внутреннего сгорания, соединенный традиционным образом, через выходной вал 102 двигателя 101, обычно через маховик (не изображен), с автоматической коробкой 103 передач через сцепление 106.
Однако тяжелые автомобили, широко используемые в сельском хозяйстве или на автострадах, обычно оборудованы не автоматическими коробками передач в традиционном смысле, а "ручными" коробками передач, в которых переключение передач осуществляется под управлением системы управления. Это частично объясняется тем, что ручные коробки передач существенно дешевле в производстве, их повышенной экономичностью и, следовательно, пониженным расходом топлива.
Сцепление 106 в изображенном варианте осуществления принимает форму сцепления с автоматическим управлением традиционного типа, например дискового типа. Включением/выключением сцепления управляет система управления транспортного средства. Это также обычно происходит в случае сцепления с ручным управлением, так что переключения передач после приведения транспортного средства в движение осуществляются при включенном сцеплении за счет надлежащего управления двигателем во время переключений передач.
Системы управления в современных транспортных средствах обычно состоят из системы шин связи, содержащей одну или более шин связи для соединения друг с другом нескольких электронных блоков управления (ECU), или контроллеров, и различных компонентов, находящихся в автомобиле. Такая система управления может содержать большое количество блоков управления, и ответственность за конкретную функцию может распределяться между двумя или более из них. Для простоты, фиг.1a изображает только два таких электронных блока 115, 116 управления, которые соответственно управляют в этом варианте осуществления двигателем 101 и сцеплением 106 (в случае сцепления с автоматическим управлением) и коробкой 103 передач (два или более из двигателя, коробки передач и сцепления в качестве альтернативы могут быть выполнены с возможностью управления только одним блоком управления). Управление двигателем, сцеплением и коробкой передач блоками 115, 116 управления обычно зависит от сигналов как друг друга, так и других блоков управления. Блоки управления изображенного типа обычно адаптированы для приема сигналов датчиков из различных частей транспортного средства, например из коробки передач, двигателя, сцепления и/или других блоков управления или компонентов транспортного средства. Блоки управления также адаптированы для подачи сигналов управления на различные части и компоненты транспортного средства, например двигатель, сцепление и коробку передач, для управления ими. Настоящее изобретение можно реализовать в любом из вышеописанных блоков управления или в каком-либо другом подходящем блоке управления в системе управления транспортного средства.
Управление различными частями и компонентами транспортного средства, например выбором передач, часто регулируется программными инструкциями. Эти программные инструкции обычно принимают форму компьютерной программы, которая при выполнении на компьютере или блоке управления предписывает компьютеру/блоку управления осуществлять нужные формы управляющего действия, например этапы способа согласно настоящему изобретению. Компьютерная программа обычно принимает форму компьютерных программных продуктов 109, которые хранятся на цифровом носителе 121 данных (см. фиг.1b), например в ПЗУ (постоянной памяти), ППЗУ (программируемой постоянной памяти), СППЗУ (стираемом ППЗУ), флэш-памяти, ЭСППЗУ (электрически стираемом ППЗУ), жестком диске и т.д., совместно с или в блоке управления, и выполняются блоком управления. Таким образом, поведение транспортного средства в конкретной ситуации можно регулировать, изменяя инструкции компьютерной программы.
Пример блока управления (блока 115 управления) схематически изображен на фиг.1b и может содержать вычислительный блок 120, который может принимать форму, по существу, любого подходящего типа процессора или микрокомпьютера, например схемы для обработки цифровых сигналов (цифрового сигнального процессора, DSP) или схемы с заранее определенной конкретной функцией (специализированной интегральной схемы, APIC). Вычислительный блок 120 подключен к блоку 121 памяти, который располагается в блоке 115 управления и откуда на вычислительный блок 120 поступает, например, сохраненный программный код и/или сохраненные данные, необходимые вычислительному блоку 120 для осуществления вычислений. Вычислительный блок 120 также адаптирован для сохранения промежуточных или окончательных результатов вычислений в блоке 121 памяти.
Блок 115 управления также снабжен устройствами 122, 123, 124, 125 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать колебательные сигналы, импульсы или другие атрибуты, которые устройства 122, 125 приема входного сигнала могут регистрировать как информацию и которые можно преобразовывать в сигналы, обрабатываемые вычислительным блоком 120. Устройства 123, 124 отправки выходного сигнала адаптированы для преобразования сигналов, принятых от вычислительного блока 120, например путем их модуляции, для создания выходных сигналов, которые можно переносить на другие части системы управления транспортного средства и/или компонент/компоненты, которым предназначены сигналы.
Каждое из соединений с устройствами для приема и отправки входных и выходных сигналов может принимать форму одного или более из кабеля, шины данных, например шины CAN (контроллерной сети), шины MOST (бортовой оптоволоконной шины транспортного средства) или некоторой другой конфигурации шины, или беспроводного соединения.
Транспортное средство 100 дополнительно содержит ведущие валы 104, 105, соединенные с его ведущими колесами 113, 114 и приводимые в действие выходным валом 107 из коробки 103 передач через конечную передачу 108, например традиционный дифференциал.
Изображенная коробка 103 передач в автомобиле 100 снабжена по меньшей мере одной повышающей передачей, адаптированной иметь рабочий диапазон под горизонтальным участком кривой крутящего момента для этой передачи на крейсерской скорости транспортного средства, как описано выше. Это означает, что транспортное средство обычно нельзя вести с включенной повышающей передачей такого типа, поскольку обороты двигателя в рабочей точке обычно будут слишком низкими, чтобы можно было развить достаточный крутящий момент, и, кроме того, с увеличением необходимости в движущей силе обороты двигателя будут падать до величины, при которой развивается еще меньшая мощность и существует опасность остановки двигателя.
Такая повышающая передача, напротив, призвана уменьшать паразитные потери и, следовательно, расход топлива в условиях эксплуатации, когда необходимость в выходной мощности снижена или отсутствует. Это применяется в настоящем изобретении, и пример варианта осуществления способа согласно настоящему изобретению проиллюстрирован на фиг.2.
На фиг.2 показана логическая блок-схема, демонстрирующая этапы, осуществляемые при управлении двигателем/коробкой передач согласно примеру способа 200 настоящего изобретения. На этапе 201 осуществляют определение, существует ли или предвидится ли низкая необходимость в выходной мощности. Снижение такой необходимости обычно можно определить, если выходная мощность, необходимая для приведения транспортного средства в движение на его скорости в данный момент времени, ниже порогового значения.
Если транспортное средство находится, например, на спуске, выходная мощность, необходимая для приведения его в движение, снижается, поскольку сила земного притяжения за счет гравитации на спусках (в отличие от подъемов) добавляет положительную (прямую) составляющую движущей силы, в связи с чем необходимость в выходной мощности двигателя для приведения транспортного средства в движение может заметно снижаться или даже совсем исчезать. Выходной мощности, отбираемой через повышающую передачу (доступного крутящего момента), может, таким образом, во многих случаях быть достаточно, чтобы давать возможность вести транспортное средство на неизменной или, по существу, неизменной скорости, несмотря на низкие обороты двигателя.
Если на этапе 201 определено наличие или скорое возникновение сниженной или отсутствующей необходимости в движущей силе, каковое определение может производиться различными другими способами, примеры которых приведены ниже, то процесс переходит к этапу 202, на котором определяется надлежащий режим вождения транспортного средства.
Настоящее изобретение использует возможности двух подходов к снижению расхода топлива с включенной повышающей передачей, в первом режиме за счет вождения транспортного средства с включенной повышающей передачей, но с торможением двигателем, т.е. вождения транспортного средства без подачи топлива в двигатель, или во втором режиме за счет вождения транспортного средства с подачей топлива в двигатель, что позволяет ему создавать движущую силу вплоть до максимальной, которую можно развить на низкой скорости повышающей передачи.
Таким образом, на этапе 202 осуществляют определение, является ли более предпочтительным, с точки зрения расхода топлива или с какой-либо другой точки зрения, вождение транспортного средства согласно первому режиму или согласно второму режиму.
В зависимости, например, от уклона дороги в данный момент времени и скорости транспортного средства в данный момент времени могут существовать разные степени преимущества при вождении транспортного средства согласно первому режиму или второму режиму. Переключение коробки передач на повышающую передачу также дает преимущество в том, что обороты двигателя падают до очень низкого значения, и уровень шума двигателя снижается. Определение режима может производиться, например, на основании сопротивления движению для транспортного средства и/или топологии дороги перед транспортным средством и оно может производиться, например, путем определения (расчета) скорости, которой транспортное средство достигнет в каждом режиме.
Фиг.3 изображает кривую крутящего момента и рабочий диапазон для вышеописанной повышающей передачи. Обороты двигателя nd - это обороты двигателя, при которых достигается крейсерская скорость транспортного средства или максимально допустимая скорость, с максимальным значением при n1, так что двигатель никогда не будет работать на горизонтальном участке кривой крутящего момента (в области между n1 и n2) на крейсерской скорости транспортного средства с включенной повышающей передачей, но всегда на более низких оборотах двигателя и, следовательно, более низком крутящем моменте. Таким образом, повышающая передача предназначена для использования в рабочей точке под горизонтальным участком кривой крутящего момента для кривой крутящего момента, и рабочая точка nd, в принципе, может сдвигаться в любую желаемую точку между n0 (точкой, где двигатель может развивать положительный крутящий момент) и n1.
В автомобиле с традиционным переключением передач, передаточные числа коробки передач установлены так, что обороты двигателя на крейсерской скорости транспортного средства располагаются в верхней части горизонтального участка кривой крутящего момента (т.е. ближе к n2) или, в качестве альтернативы, в середине горизонтального участка кривой крутящего момента (посередине между n1 и n2) для обеспечения хороших дорожных качеств транспортного средства. Крейсерская скорость транспортного средства может изменяться в зависимости от регионального законодательства или типа дороги, но может составлять, например, 80, 85 или 89 км/ч.
Крутящий момент T и выходная мощность P связаны друг с другом уравнением

где ω - угловая скорость коленвала двигателя, т.е. 2π60/rpm (где rpm = число оборотов двигателя в минуту), и это означает, что выходная мощность P, которую можно отбирать от двигателя в области до оборотов n1, ограничена более низким значением, чем максимальная мощность, которую может развивать двигатель, поскольку обороты двигателя и максимальный крутящий момент, развиваемый двигателем, снижены. Выходная мощность, отбираемая от двигателя, таким образом, ограничена, когда включена повышающая передача.
Если транспортное средство, например, движется на крейсерской скорости 80 км/ч и блок 115 управления (или 116) определяет наличие низкой необходимости в выходной мощности, например определяя сопротивление движению для транспортного средства, может включаться повышающая передача, приводя к экономии топлива при работе двигателя. Соответствующее сопротивление движению можно вычислять на основании известных скорости движения транспортного средства, крутящего момента на ведущем валу двигателя, конфигурации транспортного средства и других внешних данных. Сопротивление движению является полным представлением результирующей встречного ветра, попутного ветра, сопротивления качению, трения и потребителей энергии в автомобиле и силы тяжести, которая ускоряет/тормозит транспортное средство и, таким образом, может использоваться в качестве представления уклона дороги.
Когда включена вышеописанная повышающая передача, двигатель будет работать на низких оборотах в диапазоне под горизонтальным участком кривой крутящего момента, изображенной на фиг.2, т.е. на оборотах ниже n1. Например, необходимую выходную мощность можно считать низкой, если она ниже определенного порогового значения. Пороговое значение может составлять, например, долю, например 10-15%, максимальной выходной мощности или долю максимально доступной выходной мощности при езде на повышающей передаче.
В зависимости от выходной мощности, необходимой в данный момент времени для приведения его в движение, вождение транспортного средства, таким образом, осуществляется согласно первому режиму или второму режиму. Если он находится (или будет находиться) на спуске, благодаря чему его скорость возрастает, или поддерживается, или, по существу, поддерживается без подачи топлива в двигатель, может происходить торможение двигателем при отключении инжекции топлива согласно первому режиму.
Если вождение транспортного средства осуществляется с включенной повышающей передачей на спуске, что приводит к пониженной необходимости в выходной мощности, но спуск недостаточно крут, чтобы обеспечивать ускорение/поддержание скорости исключительно за счет силы тяжести, может производиться определение, является ли более предпочтительным вождение транспортного средства с торможением двигателем, которое может приводить к снижению скорости, или предпочтительнее подавать топливо. Например, для поддержания скорости транспортного средства постоянной или по существу постоянной может потребоваться определенный вклад двигателя, например 10-50 кВт.
Какую выходную мощность может вырабатывать двигатель при включенной повышающей передаче, зависит от того, где в области между n0 и n1 располагается рабочая точка nd, поскольку крутящий момент (и, следовательно, вышеописанная выходная мощность) сильно меняется с оборотами двигателя в соответствующем рабочем диапазоне.
Торможение двигателем на низких оборотах двигателя также обеспечивает преимущество в том, что тормозной момент, сообщаемый двигателем ведущим валам при включенной трансмиссии, будет гораздо меньше, чем при торможении на более высоких оборотах двигателя. Это иллюстрирует фиг.4 для примера двигателя внутреннего сгорания, где изображен график зависимости трения в двигателе от оборотов двигателя. Трение в двигателе, по меньшей мере частично, зависит от трения в подшипниках и между скользящими поверхностями и от энергии, расходуемой при прокачке воздуха, масла и воды через двигатель.
Из чертежа можно видеть, что тормозной момент, развиваемый двигателем, почти вдвое больше на оборотах 1800 об/мин (250 Н·м), чем на оборотах 600 об/мин (130 Н·м). Поскольку выходная мощность двигателя зависит от его крутящего момента и его оборотов, различие в тормозной мощности двигателя будет еще больше (47 кВт против 8 кВт). Таким образом, торможение двигателем на более низких оборотах двигателя позволяет вести транспортное средство без расхода топлива с более низким тормозящим усилием и, таким образом, проехать накатом большее расстояние, прежде чем для приведения транспортного средства в движение снова потребуется положительный крутящий момент.
Как упомянуто выше, альтернативное решение в такой ситуации состоит в полном отключении двигателя от ведущих валов, чтобы двигатель не прилагал никакого тормозного момента и сопротивление качению было еще меньше. Однако это решение страдает тем недостатком, что топливо постоянно расходуется для поддержания работы двигателя.
Возвращаясь к фиг.2, когда подходящий режим определен, способ переходит к этапу 203 или 204 для активации применимого режима, после чего процесс переходит к этапу 205, на котором осуществляется определение, удовлетворяет ли скоростной параметр транспортного средства первому критерию. Это может, например, принимать форму определения, отклоняется ли скорость движения транспортного средства в данный момент времени от опорной скорости Href. Это может производиться, например, путем определения, действительно ли изменение скорости относительно опорной скорости Href больше или равно пороговому значению Hthres. Hthres может составлять, например, долю, например 1, 2 или 5%, опорной скорости Href.
Пороговое значение может быть абсолютным, т.е. не зависеть от того, является ли изменение скорости увеличением или уменьшением, или оно может быть, например, только уменьшением. Пороговое значение также может быть, например, фактическим изменением скорости, например 1, 2 или 5 км/ч.
В качестве альтернативы, скоростной параметр может быть, например, производной от скорости движения транспортного средства, в каковом случае изменение (производная) скорости можно сравнивать с пороговым значением или опорным значением.
Если скорость транспортного средства не отличается от опорной скорости Href более чем на упомянутую разность или если, например, абсолютная величина производной не превышает пороговое значение или не отклоняется от опорного значения более чем на определенную величину, то процесс переходит к этапу 206.
На этапе 206 осуществляется определение, существует ли какая-либо другая причина, чтобы больше не вести транспортное средство с включенной повышающей передачей. Если это не так, то процесс возвращается к этапу 205, иначе он переходит к этапу 207.
Напротив, если изменение скорости на этапе 205 превышает пороговое значение Hthres или если производная превышает пороговое значение или отклоняется от опорного значения более чем на определенную величину, то процесс переходит к этапу 207, на котором коробка передач переключается на более низкую передачу (более высокое передаточное число) для обеспечения более значительной движущей силы и, таким образом, возможности снова ускорить транспортное средство до более высокой скорости, или в качестве альтернативы, целиком согласно фиг.4, понижение передачи приводит к увеличению тормозного сопротивления, которое можно использовать для торможения транспортного средства двигателем.
Снижение скорости может быть вызвано, например, выравниванием спуска или даже смены его подъемом. Затем процесс возвращается к этапу 201 для повторного обеспечения возможности перехода к повышающей передаче при повторном возникновении сниженной необходимости в движущей силе.
Если скорость транспортного средства превышает опорную скорость (более чем на пороговое значение Hthres), процесс может перейти к этапу (не изображен), на котором прилагается тормозной момент, например с использованием рабочего тормоза транспортного средства или с использованием, например, горного тормоза, тормоза-замедлителя и т.д., после чего процесс возвращается к этапу 205, на котором скорость транспортного средства снова сравнивается с опорной скоростью.
Вместо использования вышеописанного скоростного параметра на этапе 205 для определения, требуется ли понижение передачи (при переходе к этапу 207), необходимость в движущей силе транспортного средства можно определять любым из способов, описанных или упомянутых в этом описании, благодаря которому понижение передачи может иметь место после увеличения необходимости в движущей силе. После этого процесс может возвратиться к этапу 201 для нового определения необходимости в движущей силе.
Настоящее изобретение также можно использовать для комбинирования стратегий во время спуска, например транспортное средство можно вести на первом участке спуска в любом из упомянутых режимов, а затем вести его в другом режиме. Схема процесса, представленная на фиг.2, таким образом, может содержать, например, стрелки от этапа 206 к этапу 203 или 204.
Уже на этапе 202 можно определить, что смена режима должна происходить в определенном местоположении или спустя определенное время, но смена также может осуществляться в зависимости от других факторов. Например, можно предусмотреть, что смена режима должна происходить, например, в случае определения, что скорость транспортного средства в данный момент времени отклоняется от опорной скорости Href на пороговое значение Hthres.
Если скорость транспортного средства ниже, т.е. если она отклоняется в сторону снижения более чем на пороговое значение Hthres, можно произвести определение (на необозначенном этапе), можно ли отбирать от двигателя увеличенную выходную мощность, либо путем переключения в указанный второй режим из первого режима, либо путем увеличения выходной мощности, отбираемой во втором режиме со все еще включенной повышающей передачей.
Процесс, изображенный на фиг.2, содержит также вышестоящий процесс, этап 206. Это позволяет непрерывно отслеживать, существует ли какая-либо другая причина существования увеличенной необходимости в выходной мощности двигателя. Например, переход к более низкой передаче (более высокому передаточному числу) может происходить, например, в случае удовлетворения любого из следующих критериев: скорость транспортного средства увеличивается до уровня, заданного для функции круиз-контроля, водитель транспортного средства нажимает педаль акселератора или педаль тормоза, транспортное средство ускоряется свыше установленной скорости.
Сопротивление движению использовалось выше для определения наличия сниженной необходимости в движущей силе. Согласно примеру варианта осуществления, в качестве альтернативы, данные о дороге перед транспортным средством используются для определения, достаточно ли сниженной выходной мощности для приведения транспортного средства в движение. Например, данные из функции прогнозирования (LA) можно использовать для определения, требуется ли сниженная выходная мощность.
Например, функция LA может содержать базу данных уклонов дороги, обеспеченную в автомобиле, либо для всех дорог в географической области, например регионе, стране, континенте и т.д., либо для участков дорог, по которым обычно ездит транспортное средство. Объединение этих данных с местоположением транспортного средства, которое можно получать, например с помощью приемника GPS, позволяет системе управления транспортного средства знать характер дороги перед транспортным средством и затем использовать эти данные тем или иным образом, например, для функций круиз-контроля. В качестве альтернативы, вместо того, чтобы хранить данные уклона дороги в базе данных в автомобиле, можно организовать их передачу, непрерывную или с определенными интервалами, на транспортное средство по любой подходящей беспроводной линии связи, что позволяет корректировать передаваемые данные, например, в соответствии с местоположением транспортного средства в данный момент времени.
Помимо топографической информации, данные дороги также могут содержать информацию о скоростных ограничениях, поворотах дороги и т.д.
Эти данные также можно использовать, например, при определении согласно настоящему изобретению, что избавляет от опасности превышения скоростных ограничений или от вхождения транспортного средства в поворот с недопустимо высокой скоростью.
Эта функция LA нередко уже реализована в современных транспортных средствах, и ее данные могут поступать на блок 115 и/или 116 управления для использования при определении ожидаемых потребностей в движущей силе и/или потерь энергии.
Пример варианта осуществления настоящего изобретения использует эти данные о дороге перед транспортным средством совместно с данными транспортного средства для определения наличия сниженной необходимости в движущей силе и для определения, следует ли вести транспортное средство согласно первому режиму или второму режиму, например, путем вычисления скорости транспортного средства на нисходящих участках, где имеет место сниженная или отсутствующая необходимость в движущей силе, что позволяет затем использовать эту скорость для выбора надлежащего режима вождения транспортного средства.
Таким образом, на основании данных из упомянутой функции LA, блок 115 и/или 116 управления может заранее определить, до вершины холма, в точке, где существует сравнительно большая необходимость в движущей силе, что скоро возникнет сниженная необходимость в движущей силе, и также может достаточно точно вычислить наивысшую скорость, которой достигнет транспортное средство, зная его скорость в данный момент времени, уклон предстоящего спуска и совокупные потери энергии транспортного средства на предстоящем спуске.
Пример того, как может производиться это вычисление, приведен в параллельной шведской патентной заявке "FORFARANDE OCH ANORDNING FOR FRAMFORANDE AV ETT FORDON II" (номер заявки 0950971-2) с той же датой подачи и с тем же заявителем, что и у настоящей заявки.
При определении необходимости в движущей силе можно также использовать способ и систему для прибытия при параметре, который содержит и учитывает дорожную ситуацию транспортного средства при определении его предельной движущей силы. Определение таких параметров подробно описано в параллельной шведской патентной заявке "METOD FOR BESTAMNING AV DRIVKRAFTKAPACITET HOS ETT MOTORFORDON" (номер заявки 0950970-4) с теми же заявителем и датой подачи, что и у настоящей заявки.
Таким образом, повышающую передачу можно включать в надлежащих режимах без необходимости регистрировать сигналы двигателя для определения наличия низкой необходимости в выходной мощности.
Аналогично, понижение передачи может происходить до фактического увеличения необходимости в выходной мощности, если с использованием функции прогнозирования транспортного средства определено, что оно приближается к подъему.
Настоящее изобретение описано выше применительно к традиционной коробке передач. Однако изобретение также применимо в случае других типов коробки передач, например коробок передач CVT (бесступенчатая коробка передач), при условии, что транспортное средство может ехать с передаточным числом, при котором, в случае использования круиз-контроля, обороты его двигателя ниже наименьших оборотов для горизонтального участка кривой крутящего момента для соответствующего передаточного числа.
Помимо вышеописанных преимуществ, настоящее изобретение имеет еще одно значительное преимущество. Автомобили вышеозначенного типа обычно имеют систему очистки выхлопных газов для сокращения выбросов двигателя. Однако для нормальной работы этих систем очистки выхлопных газов обычно требуется определенная минимальная температура, например 200°C. Двигатель, используемый в режиме торможения, т.е. не снабжаемый топливом, не сможет обеспечить теплые выхлопные газы для поддержания температуры в системе очистки выхлопных газов. Напротив, через двигатель будет постоянно прокачиваться воздух, и этот сравнительно холодный воздух будет охлаждать систему очистки выхлопных газов.
Это охлаждение непосредственно связано с количеством воздуха, проходящего через двигатель. Использование упомянутой повышающей передачи для обеспечения вращения коленвала двигателя на максимально низких оборотах также сокращает количество воздуха, прокачиваемого в режиме торможения двигателем, и, следовательно, также ослабляет охлаждение системы очистки выхлопных газов, снижая необходимость в дополнительном подогреве системы очистки выхлопных газов.
Однако настоящее изобретение обеспечивает дополнительное преимущество. Как объяснено выше, для очистки выхлопных газов важно поддерживать температуру в системе очистки выхлопных газов, по меньшей мере, на определенном уровне для обеспечения нормальной работы системы. Хотя в результате вышеописанного торможения двигателем на повышающей передаче через двигатель проходит меньше холодного воздуха и, таким образом, охлаждение замедляется, все же может произойти так, что, например, на длинном нисходящем участке пути температура системы очистки выхлопных газов упадет до недопустимо низкого уровня и, таким образом, возникнет необходимость в ее повышении. Этого повышения температуры легко достигнуть при езде на повышающей передаче согласно настоящему изобретению.
Как объяснено выше, Ρ=Τω. Это означает, что для выработки определенной выходной мощности необходимо развивать более высокий крутящий момент на более низких оборотах двигателя. Следовательно, увеличивается количество топлива, которое необходимо впрыскивать для достижения нужного крутящего момента, и, следовательно, выходная мощность, по сравнению с более высокими оборотами. Это увеличение количества топлива приводит к повышению температуры выхлопных газов, а значит и температуры в системе очистки выхлопных газов, что способствует более эффективной последующей обработке. Это особенно преимущественно в случаях, когда для езды на повышающей передаче все же требуется определенная выходная мощность, чтобы транспортное средство не теряло импульс.
Тот факт, что низкие обороты двигателя приводят к уменьшению расхода бензина, также означает повышение экономичности двигателя, одновременно позволяя экономично подогревать систему очистки выхлопных газов. Таким образом, согласно варианту осуществления настоящего изобретения, выходная мощность, развиваемая при езде на повышающей передаче, может определяться не только необходимостью в движущей силе, но и необходимостью в подогреве системы очистки выхлопных газов транспортного средства, что избавляет от необходимости в других, менее экономичных, средствах подогрева.
Скорость транспортного средства была описана выше в абсолютных величинах, но следует отметить, что ее также можно описывать иначе, например, путем определения полной кинетической энергии транспортного средства, которое может производиться системой управления транспортного средства. Считается, что такого рода представление скорости содержится в термине "скорость (движения) (транспортного средства)" в настоящем описании и формуле изобретения и, таким образом, также входит в объем нижеследующей формулы изобретения.
Как упомянуто выше, на спусках двигатель транспортного средства можно отключать от его ведущих колес, когда сообщение крутящего момента не требуется для поддержания скорости транспортного средства. Настоящее изобретение также можно сочетать с подобной процедурой, в каковом случае вождение транспортного средства осуществляется, либо на вышеописанной повышающей передаче, либо с двигателем, отключенным от ведущих колес транспортного средства, в зависимости от того, что считается более предпочтительным.
Это решение подробно описано в параллельной шведской патентной заявке "FORFARANDE OCH ANORDNING FOR FRAMFORANDE AV ETT FORDON II" (номер заявки 0950971-2) с теми же заявителем и датой подачи, что и у настоящей заявки.
Реферат
Группа изобретений относится к способу и системе вождения транспортного средства, а также к транспортному средству. Способ заключается в том, что определяют, следует ли вести транспортное средство при низком передаточном числе согласно первому или второму режимам на основании необходимости в движущей силе. В первом режиме вождение транспортного средства осуществляется без подачи топлива на указанный двигатель. Во втором режиме двигатель обеспечивается подачей топлива для создания движущей силы для приведения транспортного средства в движение. Система содержит средство определения, которое определяет, следует ли вести транспортное средство при низком передаточном числе. Низкое передаточное число является таким, что обороты двигателя ниже оборотов, при которых для низкого передаточного числа достигается горизонтальный участок кривой крутящего момента, согласно первому или второму режимам. Транспортное средство содержит вышеуказанную систему. Технический результат заключается в снижении расхода топлива. 3 н. и 19 з.п. ф-лы, 5 ил.
Комментарии