Способ определения точек переключения передач - RU2516837C2
Код документа: RU2516837C2
Чертежи





Описание
Область техники
Изобретение относится к способу определения одной или более точек переключения для коробки передач транспортного средства. В частности, изобретение относится к способу в соответствии с ограничительной частью п.1 формулы изобретения. Изобретение также относится к системе, транспортному средству, компьютерной программе и компьютерному программному продукту.
Уровень техники
На фиг.1 схематично изображены детали трансмиссии автомобиля 1, такого как легковой автомобиль или тяжелое транспортное средство, например грузовик или автобус. Трансмиссия содержит двигатель 10, механически соединенный посредством вала с первым концом коробки 20 передач через устройство 40 сцепления. На другом своем конце коробка 20 передач также механически соединена посредством карданного вала 50 с дифференциальной передачей 30, связанной с задним мостом. Задний мост содержит соответственные левый и правый приводные валы 60, которые приводят в движение приводные колеса транспортного средства (не показанные на чертеже).
При данной хорошо известной конструкции механическая работа двигателя 10 передается через различные устройства трансмиссии (например, устройство 40 сцепления, коробку 20 передач, карданный вал 50, дифференциальную передачу 30 и приводные валы 60) на приводные колеса, чтобы приводить в движение транспортное средство 1. Важным устройством в трансмиссии является коробка 20 передач, которая содержит некоторое количество шестерен переднего хода для перемещения транспортного средства 1 вперед и обычно также одну или более шестерен заднего хода. Количество шестерен переднего хода может быть разным, однако в современных грузовиках обычно предусмотрено двенадцать шестерен переднего хода.
Коробка 20 передач может быть механической или автоматической, а также может представлять собой автоматическую коробку передач с возможностью ручного переключения передач (АМТ). Автоматические коробки передач и автоматические коробки передач с возможностью ручного переключения передач представляют собой автоматизированные системы коробок передач, обычно управляемые блоком 110 управления, иногда также называемым электронным блоком управления (ЭБУ), который приспособлен для управления коробкой передач 20, например, во время переключения передач, когда выбор передач осуществляется при некоторой скорости транспортного средства при некотором сопротивлении движению. ЭБУ может измерять скорость двигателя и состояние коробки 20 передач и управлять коробкой передач посредством электромагнитных клапанов, соединенных с пневматическими устройствами. Информация о двигателе 10, например его скорость и крутящий момент, также передается из двигателя 10 в ЭБУ, например, через шину CAN.
Публикация US 20080125946 относится к способу определения изменений передаточного числа для коробки передач с электронным управлением.
Публикация US 5479345 относится к способу и устройству для выбора точек переключения передач. При определении моментов переключения передач учитывают такие факторы, как уклон дороги, скорость транспортного средства и его общий вес по отношению к мощности в лошадиных силах, требующейся для поддержания скорости движения в данный момент, и скорость двигателя и доступная мощность, предполагаемая после завершения переключения передачи.
В обычных системах переключения передач блок 110 управления использует табулированные пределы скорости двигателя, называемые также точками переключения, которые изображают скорость двигателя, при которой должно осуществляться понижение или повышение передачи в коробке 20 передач, т.е. транспортное средство 1 переключает передачу, когда скорость его двигателя 10 превышает скорость, изображаемую точкой переключения. Таким образом, точки переключения могут рассматриваться как обеспечивающие информацию не только о том, когда должно осуществляться понижение или повышение передачи, но и о количестве ступеней передачи, которые должны быть осуществлены при каждом понижении или повышении передачи. Обычно каждая точка переключения предусматривает от одной до трех ступеней передачи, однако возможно и большее количество ступеней.
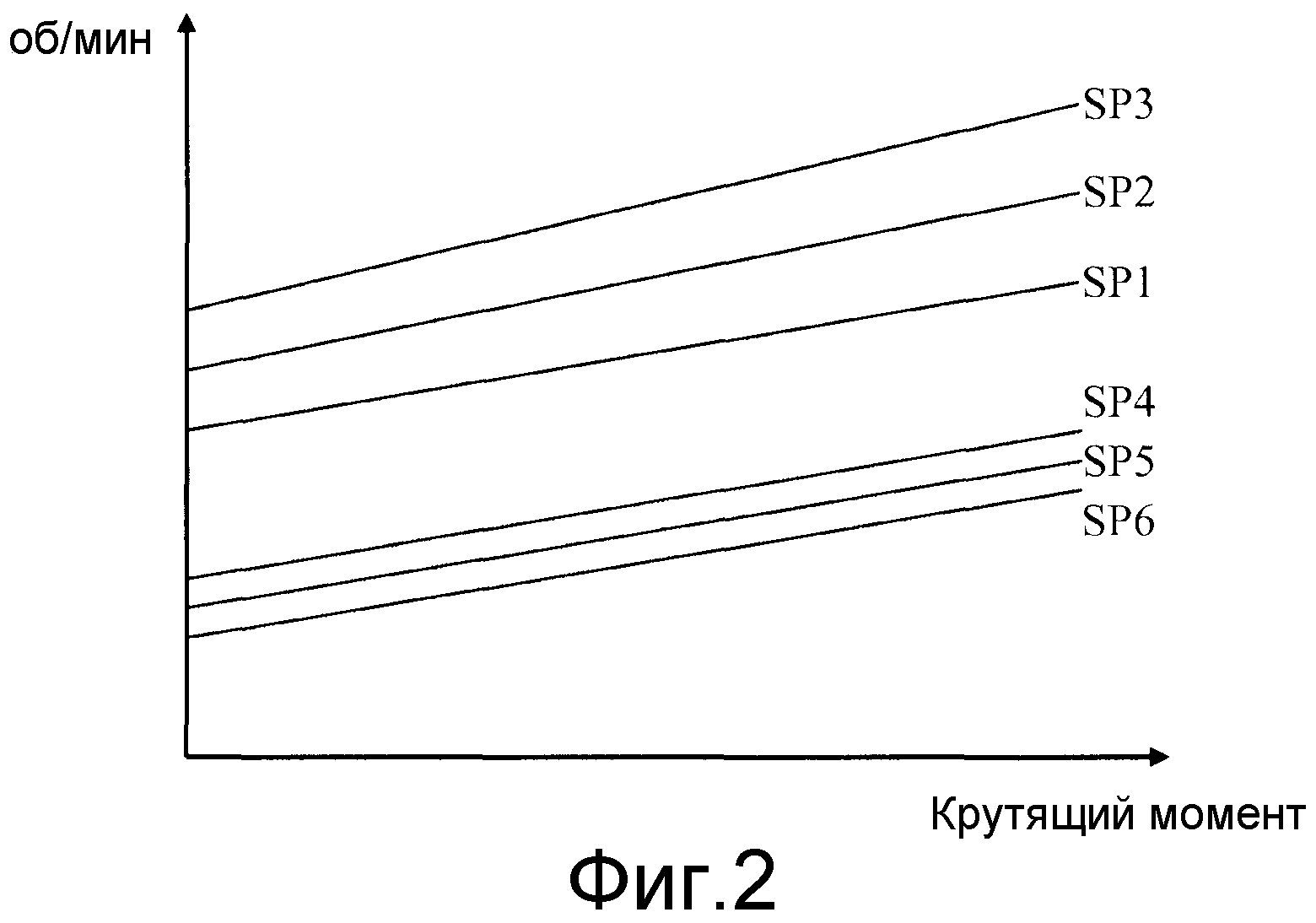
На фиг.2 схематично показан пример различных табулированных точек переключения, изображенных линиями SP1-SP6 на графике, где ось х изображает крутящий момент двигателя, а ось y - скорость двигателя 10 в оборотах в минуту (об/мин). До тех пор пока скорость двигателя находится в пределах между линиями переключения SP1 и SP4, никакого переключения передачи не происходит, однако если она поднимается выше линии повышения передачи, SP1-SP3, инициируется повышение передачи, и по аналогии, если скорость двигателя опускается ниже линии понижения передачи, SP4-SP6, инициируется понижение передачи. В приведенной ниже таблице показано количество ступеней повышения или понижения передачи для каждой из линий SP1-SP6. Например, если скорость двигателя поднимается выше линии SP1, происходит повышение передачи на одну ступень, а если скорость двигателя опускается ниже линии SP5, происходит понижение передачи на две ступени.
Выбор точки переключения передачи влияет, помимо прочего, на ходовые качества, ускорение, комфорт и расход топлива для транспортного средства 1, поэтому точки переключения передач должны быть с высокой точностью откалиброваны изготовителями транспортных средств. Данная калибровка предусматривает различные стратегии переключения передач, подвергаемые испытаниям в условиях эксплуатации в различных ситуациях вождения, например, при различных величинах приложенного ускорения, различных уклонах дороги и различных весах транспортного средства с прицепом.
Сложность при выборе точки переключения заключается в требовании обеспечения их соответствия существующим условиям, когда транспортное средство находится в движении. Например, водитель обычно переключает передачу заранее на понижение, а не на повышение, поскольку это позволяет двигателю преодолеть подъем, а также водитель обычно переключает передачу при более высоких скоростях двигателя, если транспортное средство сильно нагруженное, поскольку в этом случае требуется больше мощности.
Краткое описание изобретения
Задачей настоящего изобретения является создание альтернативного способа определения одной или более точек переключения. Другой задачей изобретения является создание способа, который полностью или частично решает проблемы известного уровня техники. Дополнительной задачей изобретения является создание способа, который обеспечивает лучшее ощущение управляемости автомобиля и в то же время простой способ изменения данного ощущения.
В соответствии с одним аспектом изобретения упомянутые задачи решаются посредством создания способа определения одной или более точек переключения для коробки передач транспортного средства, содержащего двигатель, соединенный с возможностью приведения в движение с коробкой передач, при этом точка переключения представляет скорость двигателя, при которой упомянутая коробка передач приспособлена для осуществления понижения или повышения передачи, причем упомянутая одна или более точек переключения определяются на основе целевой скорости ωТ двигателя и разности ΔωТТ первой скорости двигателя, причем упомянутая целевая скорость ωТ двигателя представляет собой требуемую скорость упомянутого двигателя, а упомянутая разность ΔωТТ первой скорости двигателя представляет собой разность между первой скоростью двигателя в первый момент времени t1 и упомянутой целевой скоростью ωТ двигателя во второй момент времени t2, причем первый и второй моменты времени t1 и t2 разделены временным периодом Т.
В зависимых пунктах формулы изобретения, относящихся к упомянутому способу, указаны варианты осуществления упомянутого способа.
Изобретение также относится к компьютерной программе, содержащей программный код, которая, когда программный код выполняется в компьютере, вынуждает компьютер осуществлять способ по любому из пунктов 1-12. Изобретение также относится к компьютерному программному продукту с компьютерной программой.
В соответствии с другим аспектом изобретения упомянутые задачи решаются посредством создания системы для определения одной или более точек переключения, содержащей, по меньшей мере, один блок управления, приспособленный для управления коробкой передач транспортного средства, содержащего двигатель, соединенный с возможностью приведения в движение с упомянутой коробкой передач, при этом точка переключения представляет собой скорость двигателя, при которой упомянутая коробка передач приспособлена для осуществления понижения или повышения передачи, причем упомянутая одна или более точек переключения определяются на основе целевой скорости ωТ двигателя и разности ΔωТТ первой скорости двигателя, при этом упомянутая целевая скорость ωТ двигателя представляет собой требуемую скорость упомянутого двигателя, а упомянутая разность ΔωТТ первой скорости двигателя представляет собой разность между первой скоростью двигателя в первый момент времени t1 и упомянутой целевой скоростью ωТ двигателя во второй момент времени t2, причем первый и второй моменты времени t1 и t2 разделены временным периодом Т.
Система в соответствии с изобретением может быть также модифицирована в соответствии с различными вариантами осуществления упомянутого способа. Изобретение также относится к автомобилю, который содержит, по меньшей мере, одну упомянутую систему.
Преимущество способа и системы в соответствии с изобретением состоит в обеспечении улучшенного ощущения управляемости транспортного средства в том смысле, что точки переключения зависят от целевой скорости двигателя и разности первой скорости двигателя. Учет различных условий эксплуатации (например, изменений в уклоне дороги и веса транспортного средства) при определении точек переключения обеспечивает в результате ощущение управляемости транспортного средства, которое приспособлено к различным условиям эксплуатации. Ощущение управляемости транспортного средства также легко изменить, позволяя приспосабливать ощущение управляемости к другим требованиям, которые могут появиться. Другое преимущество изобретения состоит в том, что транспортное средство нацелено на требуемую скорость двигателя, в результате чего двигатель может работать со скоростью, при которой он работает наилучшим образом.
Дополнительное преимущество изобретения состоит в том, что разность ΔωТТ первой скорости двигателя будет зависеть от того, какой крутящий момент способен обеспечить двигатель. При данной величине Т, чем более мощный двигатель, тем больше будет ΔωТТ. Таким образом, регулирование точек переключения осуществляется автоматически в соответствии с разными типами двигателей, поэтому система переключения передач не требует специального регулирования для каждого типа двигателя.
Другие преимущества и применения способа и системы в соответствии с изобретением указаны в приведенном ниже подробном описании.
Краткое описание чертежей
В приведенном ниже подробном описании настоящего изобретения варианты осуществления изобретения описаны со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - схематичный вид части трансмиссии транспортного средства;
Фиг.2 - график линий понижения и повышения передачи;
Фиг.3 - график линий понижения и повышения передачи относительно линии целевой скорости двигателя;
Фиг.4а - зависимость скорости двигателя от времени повышения передачи;
Фиг.4b - зависимость скорости двигателя от времени понижения передачи; и
Фиг.5 - блок управления, образующий часть системы в соответствии с изобретением.
Подробное описание изобретения
Настоящее изобретение относится к определению одной или более точек переключения для коробки 20 передач, предпочтительно, расположенной на транспортном средстве 1. Точка переключения изображает скорость двигателя, при которой коробка 20 передач приспособлена для осуществления соответственно понижения или повышения передачи. Скорость двигателя для точек повышения передачи выше скорости двигателя для точек понижения передачи.
В соответствии с изобретением точки переключения определяются на основе целевой скорости ωТ двигателя и разности ΔωТТ первой скорости двигателя. Целевая скорость ωТ двигателя представляет собой требуемую скорость двигателя 10 и может быть определена на основе допущений и знания о принципе работы и характеристиках двигателя 10. Двигатель 10 на одних скоростях обычно работает более эффективно и лучше, чем на других. Эффективно и лучше может означать меньший расход топлива, более низкие уровни вибрации и более тихую работу. Целевая скорость ωТ двигателя 10 может находиться в пределах 500-2500 об/мин и, предпочтительно, в пределах 1000-1400 об/мин.
На фиг.3 линия Φ целевой скорости двигателя показана в виде пунктирной линии между линиями SP1-SP3 повышения передачи и линиями SP4-SP6 понижения передачи. Стрелки на данном чертеже показывают, как линии SP1-SP3 повышения передачи и линии SP4-SP6 понижения передачи связаны с линией Φ целевой скорости двигателя. Это означает, что если линию Φ целевой скорости двигателя изменяют (посредством параллельного перемещения вверх или вниз в соответствии с пунктирными стрелками), то скорость двигателя для линий SP1-SP6 переключения будет также перемещаться параллельно. Линии SP1-SP6, например, могут перемещаться в соответствии с перемещением линии Φ целевой скорости пропорционально масштабному коэффициенту, который может быть разным соответственно для линий повышения и понижения передачи, но может быть также и одинаковым, в этом случае обеспечивается установленное взаимное соотношение между точками повышения и понижения передачи. Можно также иметь отдельный масштабный коэффициент для каждой линии SP1-SP6 переключения, т.е. в ответ на данное изменение линии Φ целевой скорости одни линии SP1-SP6 переключения могут изменяться больше или меньше, чем другие линии SP1-SP6 переключения.
Разность ΔωТТ первой скорости двигателя определяется как разность между первой скоростью двигателя и целевой скоростью ωТ двигателя, которые разделены временным периодом Т. Разность ΔωТТ первой скорости двигателя может рассматриваться как параметр управляемости автомобиля относительно требуемой скорости двигателя 10, т.е. целевой скорости ωТ.
Преимущество изобретения состоит в том, что можно осуществлять переключения передач в соответствии с условиями эксплуатации, поскольку изобретение обеспечивает решение, предусматривающее динамический параметр управляемости в виде разности ΔωТТ первой скорости двигателя, которая определяет диапазон скорости двигателя. Это означает, что точки переключения автоматически повышаются, если увеличивается вес транспортного средства 1 (например, в результате загрузки), транспортное средство 1 начинает подъем, двигатель 10 маломощный или переключение передачи транспортного средства 1 является быстрым и другое, и наоборот, точки переключения автоматически снижаются в том случае, если возникают противоположные условия.
Для того чтобы решения в соответствии с изобретением считались интеллектуальными и динамичными, скорость двигателя, когда включается передача, т.е. ωТ-ΔωТТ, вычисляется в зависимости от того, насколько транспортное средство 1 способно ускорить после переключения передачи ωТ, представляющую собой целевую скорость, при которой желательно, чтобы двигатель 10 работал. Когда скорость двигателя после переключения передачи, ωТ-ΔωТТ, установлена, тогда точка переключения может быть вычислена посредством воображаемого переключения передачи при обратном моделировании, т.е. начиная от достижения требуемой скорости ωТ-ΔωТТ после переключения передачи, и осуществляя обратное моделирование переключения передачи от воображаемой передачи, после переключения передачи, до передачи в данный момент, причем передача в данный момент представляет собой передачу, в которой коробка 20 передач находится в данный момент времени, таким образом достигая точки переключения для воображаемого переключения передачи. Это означает, что в предпочтительном варианте осуществления точки переключения, вычисляемые в реальном времени посредством моделирования, как описано выше, вычисляются, когда транспортное средство 1 находится в движении.
Исходя из соотношений в уравнениях (1)-(3)


где М - ускоряющий момент, J - инерция транспортного средства, ω - скорость двигателя, Me - крутящий момент маховика двигателя, Fres - сопротивление движению, r - радиус колеса, i - общее передаточное отношение, m - вес транспортного средства, и Ie - момент инерции двигателя,
эти соотношения выражаются уравнением (4)

которое означает, что разница в скорости двигателя между скоростью в момент времени t1 и целевой скоростью ΔωТТ в момент времени t2 выражается уравнением (5) в соответствии с вариантом осуществления изобретения

В соответствии с другим вариантом осуществления можно также учитывать разность скорости двигателя за время повышения передачи ΔωS, т.е. время, которое занимает вся операция повышения передачи (от инициации повышения передачи до ее завершения), которая в случае повышения передачи обычно принимает отрицательное значение (например, -300 об/мин для повышения передачи на одну ступень). В соответствии с данным вариантом осуществления скорость ωUS двигателя во время повышения передачи определяется по формуле
ωUS = ωT- ΔωTTus-ΔωS (6)
где ΔωTTus- разность первой скорости двигателя для точек повышения передачи, а скорость двигателя во время понижений передачи определяется по формуле
ωDS = ωT - ΔωTTds (7)
где ΔωTTds- разность первой скорости двигателя для точек понижения передачи.
Данный вариант осуществления позволяет также гарантировать, что ситуация опускания точки понижения передачи после повышения передачи никогда не возникает, если известно, что член ΔωTTdsв уравнении (7) больше, чем член ΔωTTusв уравнении (6), условие, которое удовлетворяется, если Т для понижения передачи больше чем Т для повышения передачи. Последнее условие удовлетворяется, если параметр Т для понижения передачи вычисляют с коэффициентом больше 1 по сравнению с параметром Т для повышения передачи. Необходимо отметить, что последний член в уравнении (6) требуется для того, чтобы точка переключения для повышения передачи была связана со скоростью двигателя после переключения передачи. Это означает, что переключение передачи должно быть подвергнуто обратному моделированию, чтобы достигнуть требуемой точки переключения. При понижениях передачи нет необходимости связывать точку переключения со скоростью двигателя после переключения передачи, а предпочтительнее со скоростью двигателя перед переключением передачи, поэтому последний член в уравнении (6) не требуется для определения точек понижения передачи.
Было также обнаружено, что длительность временного периода Т также влияет на управляемость транспортного средства 1, поэтому данный временной период Т может быть использован как параметр, когда необходимо регулировать управляемость. По этой причине в одном варианте осуществления изобретения временной период Т используется как входной параметр, поскольку временной период Т может рассматриваться как время реагирования, тем самым, помимо прочего, влияя на ощущение управления для водителя. В другом варианте осуществления изобретения данный параметр Т может быть прокалиброван для определения пригодной величины параметра Т.
В соответствии с другим дополнительным вариантом осуществления изобретения временной период Т длиннее для точки понижения передачи, чем для точки повышения передачи. Цель этого состоит в том, чтобы обеспечить более устойчивую систему переключения передач, как описано выше.
На фиг.4а показано, как можно вычислить точку повышения передачи в соответствии с вариантом осуществления посредством целевой скорости ωTдвигателя и разности ΔωTTus скорости двигателя для точки повышения передачи, при этом разность ΔωTTusскорости вычисляется от момента времени, когда передача началась (момента времени t1 на фиг.4а) до момента времени, когда двигатель достигает целевой скорости ωT(момента времени t2 на чертеже). Период времени между t1 и t2 представляет собой временной период Т. Временной период TSна фиг.4а только показывает, что выполняется повышение передачи, но не используется для вычисления точки повышения передачи.
Разность ΔωTTdsскорости двигателя представляет собой максимальную разность скорости двигателя, допустимую между скоростью двигателя и целевой скоростью ωT, когда скорость двигателя ниже целевой скорости ωT. Скорость двигателя никогда не может опуститься ниже ωT- ΔωTTds. Таким образом, точка понижения передачи определяется как ωDS = ωT-ΔωTTds, как показано на фиг.4b. При вычислении точек понижения передачи, Т представляет собой максимальное время, предусмотренное для ускорения, чтобы достигнуть целевой скорости ωTбез необходимости осуществлять понижение передачи. Для того чтобы система была устойчивой, ΔωTTdsдолжно быть больше, чем ΔωTTus, т.е. скорость двигателя после переключения передачи никогда не может быть ниже точки понижения передачи. На фиг.4b показана скорость двигателя, снижающаяся до точки понижения передачи. В момент времени t1 нажимают педаль акселератора, и транспортное средство 1 начинает ускоряться. При этом за временной период Т скорость двигателя повысится до целевой скорости. Если бы период Т был бы короче, это означало бы, что переключение передачи инициировалось бы до момента времени t1.
Коробка 20 передач, предпочтительно, образует часть автоматизированной системы переключения передач, управляемой посредством блока 110 управления, например ECU. В такой системе переключения передач осуществляются автоматически посредством блока 110 управления, однако в такой системе водитель обычно также может осуществлять переключения передач вручную, то есть переключение передачи вручную в автоматическом состоянии (автоматическом режиме). Коробка 20 передач также содержит множество шестерен, например, в современных грузовиках обычно предусмотрено двенадцать шестерен переднего хода и одна или более шестерен заднего хода.
Для специалистов будет понятно, что способ определения одной или более точек переключения в соответствии с настоящим изобретением может быть также реализован в компьютерной программе, которая, когда она выполняется в компьютере, вынуждает компьютер осуществлять данный способ. Компьютерная программа содержится в машиночитаемом носителе компьютерного программного продукта, который представляет собой пригодную память, например, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), флэш-память, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), накопитель на жестком диске и т.д.
Изобретение также относится к системе для определения одной или более точек понижения и повышения передач. Система содержит по меньшей мере, один блок управления (например, ЭБУ для коробки 20 передач), приспособленный для управления коробкой 20 передач в автомобиле 1. Коробка 20 передач соединена с двигателем 10, который приводит в движение коробку 20 передач и другие детали трансмиссии. В соответствии с концепцией изобретения система приспособлена для определения упомянутой одной или более точек переключения на основе целевой скорости ωT двигателя и разности ΔωTT первой скорости двигателя. Целевая скорость ωT двигателя представляет собой требуемую скорость двигателя 10, а разность ΔωTT первой скорости двигателя представляет собой разность между первой скоростью двигателя и целевой скоростью ωT, которые разделены временным периодом Т.
На фиг.5 схематично показан блок 110 управления. Блок 110 управления содержит вычислительное устройство 111, которое может представлять собой по существу любой пригодный тип процессора или микрокомпьютера, например схему цифровой обработки сигналов (цифровой процессор сигналов (DSP) или схему с заданной конкретной функцией (специализированную интегральную схему (ASIC)). Вычислительное устройство 111 соединено с запоминающим устройством 112, которое включено в блок 110 управления и которое обеспечивает вычислительное устройство 111, например, хранимым программным кодом и/или хранимыми данными 111, которые необходимы вычислительному устройству 111 для обеспечения выполнения вычислений. Вычислительное устройство 111 также приспособлено для хранения промежуточных или конечных результатов вычислений в запоминающем устройстве 112.
Блок 110 управления дополнительно содержит устройства 113, 114, 115, 116 соответственно для приема входных сигналов и передачи выходных сигналов. Данные входные и выходные сигналы могут представлять собой формы волн, импульсы или другие признаки, которые устройства 113, 116, принимающие сигналы, способны воспринимать как информацию и которые могут быть преобразованы в сигналы, которые могут быть обработаны вычислительным устройством 111. При этом вычислительное устройство 111 содержит данные сигналы. Устройства 114, 115, передающие сигналы, приспособлены для преобразования сигналов, принимаемых из вычислительного устройства 111, с возможностью образования, например, посредством модуляции сигналов, выходных сигналов, которые могут быть переданы в другие части системы для определения точек понижения и повышения передачи. Специалисту в данной области техники будет понятно, что вышеупомянутый компьютер может представлять собой вычислительное устройство 111 и что вышеупомянутая память может представлять собой запоминающее устройство 112.
Каждое из соединений с соответствующими устройствами для соответственно приема входных сигналов или передачи выходных сигналов может представлять собой одно или более из нижеперечисленного: кабель, шину данных, например, шину CAN, шину MOST или какую-либо другую конфигурацию шин или беспроводное соединение. Соединения 70, 80, 90, 100 на фиг.1 могут также представлять собой одно или более из данных кабелей, шин или беспроводных соединений.
Специалистам будет также понятно, что упомянутая система может быть модифицирована в соответствии с различными вариантами осуществления способа определения точек переключения передач в соответствии с изобретением. Изобретение относится также к автомобилю 1, который содержит по меньшей мере одну систему для определения одной или более точек понижения и повышения передачи в соответствии с изобретением.
Наконец, настоящее изобретение не ограничено вышеописанными вариантами осуществления, а относится к и включает все варианты осуществления, находящиеся в пределах объема охраны прилагаемых независимых пунктов формулы изобретения.
Реферат
Группа изобретений относится к способу определения точек переключения для коробки передач транспортного средства, к способу использования точек переключения, к системе определения точек переключения и к транспортному средству. Способ определения точек переключения заключается в том, что одну или более точек переключения определяют на основе целевой скорости двигателя и разности первой скорости двигателя. Целевая скорость двигателя представляет собой требуемую скорость двигателя. Разность первой скорости двигателя представляет собой разность между первой скоростью двигателя в первый момент времени и целевой скоростью двигателя во второй момент времени. Первый и второй моменты времени разделены временным периодом. Точка переключения представляет собой скорость двигателя, при которой коробка передач осуществляет понижение или повышение передачи. Способ использования точек переключения во время переключения передач в коробке передач транспортного средства заключается в том, что одну или более точек переключения определяют в соответствии с вышеуказанным способом. Система содержит блок управления, выполненный с возможностью управления коробкой передач транспортного средства в соответствии с вышеуказанным способом. Транспортное средство, например грузовик или автобус, содержит вышеуказанную систему. Технический результат заключается в улучшении управляемости транспортным средством. 4 н. и 11 з.п. ф-лы, 6 ил., 1 табл.
Формула
ωUS = ωT- ΔωTTus-ΔωS
где ΔωTTus- разность первой скорости двигателя для точки повышения передачи, а одну или более точек переключения во время понижения передачи определяют по формуле
ωDS = ωT- ΔωTTds
где ΔωTTds- разность первой скорости двигателя для точки понижения передачи.
где Ме - крутящий момент маховика двигателя (10), Ie - момент инерции двигателя (10) и Fres, r, i и m - соответственно сопротивления движению, радиус колеса, общее передаточное отношение и вес транспортного средства (1).
Комментарии