Способ и система для управления транспортным средством - RU2510474C1
Код документа: RU2510474C1
Чертежи





Описание
Область техники
Настоящее изобретение относится к способу и системе для управления транспортным средством. В частности, изобретение относится к способу и системе для управления транспортным средством в ситуациях, когда имеется или возникнет сниженная потребность в выходной мощности для управления упомянутым транспортным средством.
Уровень техники
При управлении тяжелыми транспортными средствами, например грузовиками, автобусами и т.п., экономичность транспортного средства со временем стала все более значительным фактором в рентабельности той деятельности, в которой используется транспортное средство. Помимо затрат на материально-техническое снабжение, основные затраты, включенные в повседневную работу тяжелого транспортного средства, обычно включают оплату водителя, затраты на ремонт и обслуживание и топливо для движения транспортного средства.
В зависимости от типа транспортного средства, влияние разных факторов может меняться, но расход топлива обычно является главным элементом в затратах, а поскольку коэффициент использования оборудования у тяжелых транспортных средств часто является высоким и включающим в себя большой общий расход топлива, то каждый возможный способ снижения расхода топлива имеет положительное воздействие на рентабельность.
На дальних рейсах особенно важно оптимизировать расход топлива. С этой целью существуют транспортные средства для перевозок на большие расстояния, отличающиеся типичной средней частотой вращения двигателя для некоторой средней скорости транспортного средства. Типичные средние скорости транспортного средства в зависимости от области или типа дороги могут составлять, например, 80 км/ч, 85 км/ч или 89 км/ч.
Вообще для тяжелых транспортных средств доступны различные конфигурации силового агрегата, но поскольку часто желательно, чтобы такие транспортные средства управлялись как можно комфортнее для водителя, они часто снабжаются автоматическими коробками передач, так что переключения передач управляются системой управления, которая обычно встраивается в транспортное средство.
То, что автоматическое переключение передач в тяжелых транспортных средствах обычно управляется системой управления, позволяет использовать некую структуру управления, при помощи которой управление двигателем и коробкой передач проводится частично на основе команд от водителя транспортного средства, но также во многом посредством системы управления (возможность, которая часто применяется). По этой причине система управления часто включает в себя также функции для улучшения расхода топлива путем воздействия в максимальной степени на переключения передач и выборы передач как можно более экономичным способом.
Примером такой функции является функция, при помощи которой, когда транспортное средство находится на спуске, двигатель отключается от ведущих колес, когда не требуется участие крутящего момента для поддержания скорости транспортного средства. Силовой агрегат транспортного средства впоследствии снова подключается, когда, например, водитель нажимает педаль акселератора или тормозную педаль.
Хотя вышеупомянутая отключающая функция хорошо работает во многих случаях, по-прежнему имеются ситуации, в которых можно дополнительно снизить расход топлива у транспортных средств, приводимых в движение двигателем внутреннего сгорания.
Краткое описание изобретения
Задачей настоящего изобретения является создание способа для управления транспортным средством, при помощи которого можно снизить расход топлива у последнего. Эта задача решается посредством создания способа согласно п. 1 формулы изобретения.
Настоящее изобретение относится к способу для управления транспортным средством, которое имеет коробку передач, подключенную к двигателю внутреннего сгорания и допускающую задание некоторого количества разных передаточных чисел, чтобы сообщить движущую силу, по меньшей мере, одному приводному валу для движения транспортного средства. Транспортное средство выполнено с возможностью управления в, по меньшей мере, первом режиме и втором режиме, так что в первом режиме коробка передач переключается на низкое передаточное число, а во втором режиме двигатель отключается от, по меньшей мере, одного приводного вала. Способ, когда транспортное средство управляется в ситуации, где существует или в пределах определенного времени возникнет сниженная потребность в движущей силе для транспортного средства, включает:
Определение того, следует ли управлять транспортным средством в соответствии с первым режимом или вторым режимом, например, на основе внешнего параметра для окружения транспортного средства. Внешний параметр может быть состоянием будущего окружения транспортного средства, и определение может выполняться посредством одного или нескольких блоков управления в системе управления транспортного средства.
Это предоставляет преимущество в том, что транспортное средство может управляться, например, на спусках, способом, который, например, с точки зрения расхода топлива наиболее эффективен в преобладающих условиях. Например, в некоторых случаях может быть выгоднее управлять транспортным средством с задействованной перегрузкой, тогда как в других случаях может быть выгоднее управлять им с разомкнутым силовым агрегатом, то есть с двигателем, отключенным от ведущих колес транспортного средства.
Внешний параметр может быть, например, представлением топологии дороги впереди транспортного средства и/или сопротивлением движению транспортного средства.
Дополнительные характеристики настоящего изобретения и его преимущества будут указаны с помощью подробного описания примеров вариантов осуществления, представленного ниже, и приложенных чертежей.
Краткое описание чертежей
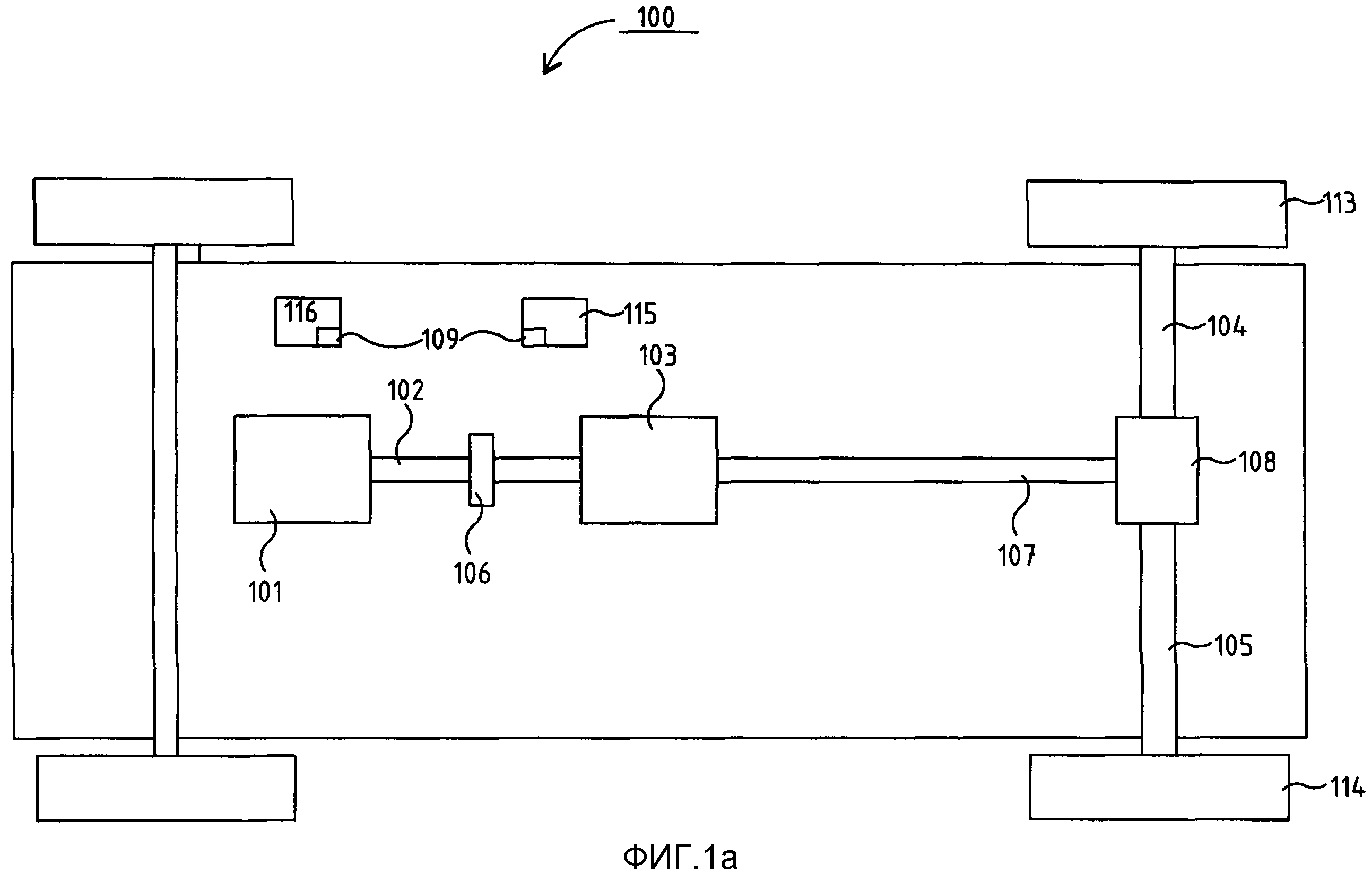
Фиг. 1a - силовой агрегат в транспортном средстве, в котором может с выгодой использоваться настоящее изобретение;
Фиг. 1b - пример блока управления в системе управления транспортным средством;
Фиг. 2 - блок-схема алгоритма, иллюстрирующая пример способа для контроля управления транспортным средством в соответствии с примером варианта осуществления настоящего изобретения;
Фиг. 3 - кривая крутящего момента для двигателя с указанными ограничениями для перегруженного рабочего диапазона;
Фиг. 4 - управление транспортным средством согласно примеру участка дороги; и
Фиг. 5 - трение двигателя в зависимости от частоты вращения двигателя в примере двигателя внутреннего сгорания.
Подробное описание примеров осуществления изобретения
Под термином "перегрузка" обычно понимают зубчатую передачу, на которой выходной вал коробки передач вращается быстрее (главного) вала двигателя.
Однако в описании и формуле изобретения, представленных ниже, термин "перегрузка" ограничивается обозначением зубчатой передачи, на которой транспортное средство на своей средней скорости управляется с частотой вращения двигателя ниже той, при которой достигается плато крутящего момента для зубчатой передачи. Это означает, что максимальный крутящий момент не будет доступен на такой зубчатой передаче, представляя ту зубчатую передачу неиспользуемой за исключением ситуаций, где потребность в движущей силе снижается.
Это иллюстрируется на фиг. 3, которая изображает кривую крутящего момента с указанным рабочим диапазоном для перегрузки, как указано выше. Частота nd вращения двигателя обозначает частоту вращения двигателя, при которой достигается средняя скорость транспортного средства или максимальная допустимая скорость, так что двигатель никогда не будет работать на плато крутящего момента перегрузки (область между n1 и n2), а всегда на меньшей частоте вращения двигателя, и поэтому с меньшим крутящим моментом. Перегрузка соответственно предназначена для использования в рабочей точке ниже плато крутящего момента для кривой крутящего момента, и рабочую точку nd в принципе можно сдвинуть в любую нужную подходящую точку между n0 (точка, где частота вращения двигателя достаточно высокая, чтобы иметь возможность передать положительный крутящий момент) и n1.
Это отличается от транспортных средств с обычными зубчатыми передачами, в которых передаточные числа коробки передач организованы так, что транспортное средство управляется на частоте вращения двигателя, которая находится в середине плато крутящего момента (посередине между n1 и n2) или в верхней части плато крутящего момента (то есть n2) для наивысшей зубчатой передачи, когда транспортное средство движется со средней скоростью. Средняя скорость транспортного средства может меняться в зависимости от региональных правил или типа дороги, но может быть, например 80, 85 или 89 км/ч.
Управление транспортными средствами с использованием перегрузки также упоминается в параллельной заявке на патент Швеции "FÖRFARANDE OCH SYSTEM FÖR FRAMFÖRANDE AV ETT FORDON I" (номер заявки 0950973-8) с таким же заявителем и датой подачи, что и настоящая заявка, а также в параллельной заявке на патент Швеции "FÖRFARANDE OCH SYSTEM FÖR FRAMFÖRANDE AV ETT FORDON III" (номер заявки 0950976-1) с таким же заявителем и датой подачи, что и настоящая заявка.
Крутящий момент T и выходная мощность P связаны друг с другом уравнением
P=Tω (1)
где ω обозначает угловую скорость двигателя, то есть 2π60/rpm (где rpm - обороты двигателя в минуту), что означает, что выходная мощность P, которую можно получить от двигателя в области вплоть до скорости n1, ограничивается значением ниже максимального, которое может передать двигатель, поскольку ниже частота вращения двигателя и максимальный крутящий момент, передаваемый двигателем. Выходная мощность от двигателя соответственно ограничивается, когда задействуется перегрузка.
Фиг. 1a изображает пример силового агрегата в тяжелом транспортном средстве 100, например грузовике, автобусе или т.п., в соответствии с примером варианта осуществления настоящего изобретения. Транспортное средство 100, схематически изображенное на фиг. 1a, имеет только одну ось с ведущими колесами 113, 114, но изобретение также применимо к транспортным средствам, которые имеют более одной оси, снабженной ведущими колесами. Силовой агрегат содержит двигатель 101 внутреннего сгорания, подключенный традиционным способом через выходной вал 102 двигателя 101, обычно через маховик (не изображен), к автоматической коробке 103 передач посредством сцепления 106.
Однако тяжелые транспортные средства, используемые в основном в сельском хозяйстве или на автомагистралях, обычно снабжаются не автоматическими коробками передач в традиционном смысле, а "ручными" коробками передач, в которых переключение передач управляется системой управления. Частично причина в том, что ручные коробки передач значительно дешевле для производства, а также из-за их большей эффективности, и, следовательно, меньшего расхода топлива.
Сцепление 106 в изображенном варианте осуществления принимает форму автоматически управляемого сцепления традиционного типа, например, дискового типа. Выключение/включение сцепления управляется системой управления транспортного средства. Это также стандартно в случае вручную управляемого сцепления, так что переключения передач после того, как транспортное средство приведено в движение, происходят при включенном сцеплении с помощью подходящего управления двигателем во время переключения передач.
Системы управления в современных транспортных средствах обычно состоят из системы коммуникационных шин, содержащей одну или несколько коммуникационных шин для соединения множества электронных блоков управления (ECU), или контроллеров, и различных компонентов, расположенных в транспортном средстве. Такая система управления может содержать множество блоков управления, и ответственность за определенную функцию может делиться между двумя или более из них. Для упрощения фиг. 1a изображает только два таких электронных блока 115, 116 управления, которые в этом варианте осуществления соответственно управляют двигателем 101 и сцеплением 106 (в случае с автоматически управляемым сцеплением) и коробкой 103 передач (два или более из двигателя, коробки передач и сцепления в качестве альтернативы могут быть выполнены с возможностью управления только одним блоком управления). Управление двигателем, сцеплением и коробкой передач с помощью блоков 115, 116 управления обычно зависит от сигналов друг от друга, а также от других блоков управления. Блоки управления изображенного типа обычно приспособлены для приема сигналов датчиков от различных частей транспортного средства, например от коробки передач, двигателя, сцепления и/или других блоков управления или компонентов транспортного средства. Блоки управления дополнительно приспособлены для доставки управляющих сигналов к различным частям и компонентам транспортного средства для их управления, например двигателю, сцеплению и коробке передач. Настоящее изобретение может быть реализовано в любом из упомянутых блоков управления либо в некотором другом подходящем блоке управления в системе управления транспортного средства.
Управление различными частями и компонентами транспортного средства, например, выбором передач (передаточных чисел), часто определяется запрограммированными командами. Эти запрограммированные команды обычно принимают форму компьютерной программы, которая при исполнении на компьютере или в блоке управления побуждает компьютер/блок управления осуществлять нужные формы управляющего воздействия, например этапы способа в соответствии с настоящим изобретением. Компьютерная программа обычно принимает форму компьютерных программных продуктов 109, которые хранятся на цифровом носителе 121 информации (см. фиг. 1b), например ПЗУ (постоянное запоминающее устройство), ППЗУ (программируемое постоянное запоминающее устройство), СППЗУ (стираемое ППЗУ), флэш-память, ЭСППЗУ (электрически стираемое СППЗУ), жесткий диск и т.д., в сочетании с блоком управления или в нем, и исполняются блоком управления. Поведение транспортного средства в определенной ситуации соответственно может регулироваться путем изменения команд компьютерной программы.
Пример блока управления (блока 115 управления) изображается схематически на фиг. 1b и может содержать блок 120 вычисления, который может принимать форму практически любого подходящего типа процессора или микрокомпьютера, например схемы для цифровой обработки сигналов (Цифровой процессор сигналов, DSP) или схемы с заранее установленной конкретной функцией (Специализированная интегральная схема, ASIC). Блок 120 вычисления подключается к запоминающему устройству 121, которое расположено в блоке 115 управления и которое снабжает блок 120 вычисления, например, сохраненным программным кодом и/или сохраненными данными, которые нужны блоку 120 вычисления, чтобы иметь возможность выполнять вычисления. Блок 120 вычисления также приспособлен для хранения частичных или конечных результатов вычислений в запоминающем устройстве 121.
Блок 115 управления дополнительно снабжается устройствами 122, 123, 124, 125 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать формы волны, импульсы или другие атрибуты, которые устройства 122, 125 приема входных сигналов могут обнаружить в качестве информации и которые могут быть преобразованы в сигналы, обрабатываемые блоком 120 вычисления. Устройства 123, 124 отправки выходных сигналов приспособлены для преобразования сигналов, принятых от блока 120 вычисления, чтобы путем, например, их модулирования, создать выходные сигналы, которые можно передать другим частям системы управления транспортного средства и/или компоненту/компонентам, для которых они предназначены.
Каждое из соединений с устройствами для приема и отправки входных и выходных сигналов может принимать форму одного или нескольких из кабеля, шины данных, например шины CAN (Сеть контроллеров), шины MOST (Транспорт для мультимедийных систем) или некоторой другой конфигурации шины, или беспроводного соединения.
Транспортное средство 100 дополнительно содержит приводные валы 104, 105, подключенные к ведущим колесам 113, 114 и приводимые в движение выходным валом 107 от коробки 103 передач через конечную передачу 108, например, традиционный дифференциал.
Изображенная коробка 103 передач в транспортном средстве 100 снабжается, по меньшей мере, одной повышающей передачей, приспособленной иметь рабочий диапазон ниже плато крутящего момента для той зубчатой передачи на средней скорости транспортного средства, как описано выше. Это означает, как и выше, что транспортным средством обычно нельзя управлять при таком типе задействованной перегрузки, поскольку частота вращения двигателя в рабочей точке обычно будет слишком низкая, чтобы смочь передать достаточный крутящий момент. К тому же, как только увеличивается потребность в движущей силе, двигатель перейдет на меньшую скорость, на которой доступно еще меньше мощности, и существует опасность остановки двигателя.
Цель такой перегрузки - минимизировать паразитные потери, а отсюда и расход топлива в рабочих условиях, где имеется сниженная потребность или отсутствие потребности в выходной мощности.
Альтернативный способ снижения расхода топлива в некоторых ситуациях принимает форму, как и выше, функции, при помощи которой двигатель отключается от ведущих колес транспортного средства, например, путем выключения сцепления или перевода коробки передач в нейтральное положение, когда транспортное средство находится на спуске, где не требуется участие крутящего момента от двигателя для поддержания или существенного поддержания скорости транспортного средства.
Настоящее изобретение использует возможности обоих этих способов снижения расхода топлива путем управления транспортным средством с задействованной перегрузкой в первом режиме или управления транспортным средством с отключенным двигателем во втором режиме.
Пример варианта осуществления способа для управления транспортным средством в соответствии с настоящим изобретением иллюстрируется на фиг. 2.
Этап 201 определяет, имеется ли сниженная потребность в выходной мощности. Низкая потребность в выходной мощности обычно может определяться, если выходная мощность, нужная для продвижения транспортного средства с его скоростью на тот момент, ниже порогового значения.
Если транспортное средство управляется, например, на спуске, то уменьшается выходная мощность, нужная для его продвижения, потому что сила притяжения земли из-за гравитации на спусках (в отличие от подъемов) вносит положительную (направленную вперед) составляющую движущей силы, так что потребность в выходной мощности от двигателя для продвижения транспортного средства можно заметно уменьшить или даже вообще устранить, поэтому отключение двигателя от ведущих колес, то есть размыкание силового агрегата путем, например, перевода коробки передач в нейтральное положение или выключения сцепления, может привести к тому, что транспортное средство, которому содействует сила тяжести на спуске, поддерживает нужную скорость или даже набирает скорость. В качестве альтернативы потребность в выходной мощности может оставаться, но на сниженном уровне относительно максимальной мощности двигателя, так что пониженная мощность (доступный крутящий момент), получаемая с использованием перегрузки, достаточна для возможности управления транспортным средством с неизменившейся или практически неизменившейся скоростью, несмотря на низкую частоту вращения двигателя, привлеченную как и выше.
Если определяется, что имеется или скоро возникнет сниженная потребность или отсутствие потребности в движущей силе, что можно сделать различными способами, как проиллюстрировано ниже, то процесс переходит к этапу 202, где определяется подходящий режим для управления транспортным средством.
Этап 202 соответственно выполняет определение с точки зрения расхода топлива или некоторой другой точки зрения, выгоднее ли переключить коробку передач на перегрузку (режим 1) или отключить двигатель от (одного или нескольких) приводных валов транспортного средства (разомкнуть силовой агрегат) (режим 2), чтобы снизить сопротивление качению транспортного средства, не применяя крутящий момент двигателя, или следует ли вообще поддерживать частоту вращения двигателя с некоторой другой целью.
Переключение на перегрузку дает преимущество в снижении потребности двигателя в топливе, посредством этого добиваясь экономии топлива, в то же время частота вращения двигателя опускается до очень низкого значения, и уровень шума от двигателя падает.
В зависимости, например, от уклона дороги в тот момент и скорости транспортного средства в тот момент могут быть разные уровни преимущества при задействовании перегрузки или отключении двигателя.
Определение режима выполняется с использованием внешнего параметра, который представляет состояние окружения транспортного средства, например, сопротивление движению транспортного средства или топология дороги впереди транспортного средства, и может выполняться, например, путем определения (вычисления) наивысшей скорости, которую достигнет транспортное средство в каждом режиме.
Фиг. 4 иллюстрирует пример транспортного средства, движущегося по холмистому отрезку дороги. В местоположении p1транспортное средство 400 находится в конце подъема и приближается к вершине холма. Определение в соответствии с этапом 202 в зависимости от того, как оно выполняется, может происходить либо уже в точке p1, либо в точке p2, или после того, как транспортное средство прошло вершину.
Первый пример варианта осуществления использует функцию упреждения (LA) при определении на этапе 202 стратегии для того, как лучше всего разобраться со спуском с точки зрения, например, расхода топлива.
Функция LA может содержать, например, базу данных уклона дороги, предоставленную в транспортном средстве либо для всех дорог в некой географической территории, например области, стране, континенте и т.д., либо для участков дороги, по которым обычно движется транспортное средство. Объединение этих данных с местоположением транспортного средства, которое можно получить, например, с помощью приемника GPS, позволяет системе управления транспортного средства быть осведомленной о характере дороге впереди транспортного средства, а затем использовать эти данные различными способами, например, для функций автоматического поддержания скорости. В качестве альтернативы вместо сохранения в базе данных в транспортном средстве данные об уклоне дороги могут быть выполнены с возможностью отправки постоянно или с некоторыми интервалами на транспортное средство посредством любого подходящего радиоканала, так что переданные данные могут управляться, например, местоположением транспортного средства в тот момент. В дополнение к топографической информации данные о дороге также могут содержать информацию об ограничениях скорости, поворотах дороги и т.д. Эти данные также могут использоваться при определении в соответствии с настоящим изобретением, например, чтобы не было опасности превышения ограничений скорости или вхождения транспортного средства в поворот с нежелательно высокой скоростью.
Эта функция LA часто уже реализована в современных транспортных средствах, и данные от нее могут отправляться в блок 115 и/или 116 управления для использования в определении будущих потребностей в движущей силе и/или энергетических потерь.
Первый пример варианта осуществления настоящего изобретения использует эти данные о дороге впереди транспортного средства в сочетании с данными транспортного средства для определения на этапе 201, что имеется сниженная потребность в движущей силе, и для вычисления скорости транспортного средства на спусках, когда имеется сниженная потребность или отсутствие потребности в движущей силе, чтобы эта скорость затем использовалась для выбора подходящей стратегии переключения передач.
Таким образом, на основе данных от упомянутой функции LA блок 115 и/или 116 управления может уже определить в точке p1, где имеется относительно большая потребность в движущей силе, что скоро возникнет сниженная потребность в движущей силе, и он также может относительно точно вычислить наивысшую скорость, которую достигнет транспортное средство, зная его скорость в тот момент, уклон будущего спуска и совокупные энергетические потери транспортного средства на будущем спуске.
Таким образом, можно задействовать перегрузку или отключить двигатель в оптимальный момент времени без необходимости обнаружения сигналов двигателя, чтобы определить, что имеется низкая потребность в выходной мощности.
Например, потребность в выходной мощности может считаться низкой, если эта мощность ниже некоторого порогового значения, которое может быть долей, например, 10-15%, от максимальной выходной мощности.
Определение может основываться, например, на затратах энергии. Изменение потенциальной энергии между вершиной холма p2 и точкой на спуске, например самой нижней точкой p3 или любой другой точкой на спуске, например точкой p1, или точкой, где скорость транспортного средства наибольшая (которая может быть, например, точкой p3), можно записать в виде E=mgh, где h обозначает разницу в высоте между p2 и выбранной точкой (в этом случае p3), а m - вес транспортного средства.
Как правило, преобразованную работу (энергию), когда тело перемещается на расстояние s, можно записать в виде

Таким образом, эту потенциальную энергию можно переписать в следующем виде (следует отметить, что это уравнение упрощено, и что на транспортное средство на практике может влиять больше факторов, которые необходимо учитывать в ситуациях, где они важны):

где:
пределы интеграла задаются 0, который представляет точку, где выполняется вычисление, а s представляет расстояние, которое пройдет транспортное средство перед достижением выбранной точки,
v1 обозначает скорость транспортного средства на вершине p2 холма,
v2 обозначает скорость транспортного средства в нижней точке p3,
Fair обозначает сопротивление воздуха у транспортного средства и может вычисляться системой управления в соответствии с уравнениями, которые хорошо описаны в известном уровне техники, среди прочего на основе скорости транспортного средства и площади поперечного сечения в направлении перемещения,
Frr обозначает сопротивление качению транспортного средства, которое также вычисляется в соответствии с известными уравнениями на основе веса транспортного средства, коэффициента сопротивления качению и уклона дороги,
Feng обозначает движущую силу, приложенную двигателем к ведущим колесам транспортного средства. В вышеприведенном уравнении эта движущая сила описывается как сила торможения, что верно в случае тянущего двигателя, который прикладывает направленную вперед движущую силу отрицательно с помощью трения двигателя. В случае толкающей (положительной) движущей силы знак в уравнении изменяется, и Feng=0 в случае отключенного двигателя (режим 2, как и выше),
Fgb обозначает трение коробки передач, которое может оцениваться системой управления транспортного средства на основе знания положения передачи и температуры коробки передач (более высокая температура обычно означает меньшее трение), Faxle/nav обозначает трение в задней оси/уплотнениях/подшипниках колес и может зависеть от скорости и храниться в системе управления,
F1 обозначает другие силы, которые необходимо учитывать в некоторых случаях, где они важны, например нагружающее двигатель вспомогательное оборудование, такое как компрессор кондиционера, генератор, воздушный компрессор и рулевое управление с усилителем. Также может быть важно учесть мощность торможения и/или момент инерции. В других случаях этот фактор можно оценить как ноль, и
s обозначает расстояние, пройденное транспортным средством, в этом случае расстояние от точки p2 до точки p3.
Уравнение (2) выше и сведения о характере дороги впереди транспортного средства могут соответственно использоваться для определения наиболее подходящей стратегии для применения на спуске с точки зрения расхода топлива. То, насколько выгодны могут быть разные стратегии в разных ситуациях, будет зависеть, например, от того, насколько крутым является спуск, и характера дороги после спуска.
В примере, изображенном на фиг. 4, предполагаемую скорость транспортного средства в точке p3 или некоторой другой точке на спуске можно соответственно оценить в точке p1, например, для движения по спуску на перегрузке (для тянущего двигателя и для толкающего двигателя) или с отключенным от ведущих колес двигателем, и также для разных моментов переключения передач (то есть должно ли отключение/задействование перегрузки происходить до, во время или после вершины p2 холма), чтобы лучше всего оптимизировать движение транспортного средства, например, с точки зрения расхода топлива.
Например, переключение на перегрузку/отключение двигателя может быть выполнено с возможностью происходить уже до того, как транспортное средство достигает вершины холма, например, если уже можно заранее решить, что транспортное средство в противном случае ускорялось бы до максимальной допустимой скорости на будущем спуске.
Аналогичным образом, переключение на пониженную передачу может происходить до того, как фактически возникнет потребность в выходной мощности, если определяется, что транспортное средство приближается к подъему.
Также возможно оценить скорость транспортного средства на последующем подъеме, в этом случае определение стратегии переключения передач может учитывать вероятность того, что транспортное средство может ускоряться на спуске до такой скорости, что короткий последующий подъем, за которым следует дальнейший спуск, можно преодолеть без предоставления ненужной движущей силы.
Если обнаруживается, например, что сопротивление движению у транспортного средства отрицательное, то есть спуск таков, что отключение двигателя от ведущих колес транспортного средства приведет к увеличению скорости, что вызывает необходимость торможения транспортного средства до того, как оно достигает точки p3, то лучше задействовать перегрузку с замкнутым силовым агрегатом, чтобы посредством этого увеличить сопротивление движению с использованием трения двигателя. В этой ситуации никакой энергии не передается от двигателя, который вместо этого "тянется" с выключенным впрыском топлива и, следовательно, без расхода топлива.
Трение двигателя, по меньшей мере, частично зависит от трения в подшипниках и скользящих поверхностях и от энергии, потребленной при нагнетании воздуха, масла и воды через двигатель. Фиг. 5 иллюстрирует трение двигателя в зависимости от частоты вращения двигателя в примере двигателя внутреннего сгорания.
На схеме можно увидеть, что тормозной момент, приложенный двигателем, почти в два раза больше примерно на 1800 об/мин (250 Нм) чем на 600 об/мин (130 Нм). Поскольку выходная мощность двигателя зависит от его крутящего момента и его частоты вращения, то разница в выходной мощности торможения будет еще больше (47 кВт по сравнению с 8 кВт). Вытягивание двигателя на различных частотах вращения двигателя соответственно позволяет управлять транспортным средством без расхода топлива с различными тормозными сопротивлениями.
Вытягивание двигателя на низкой частоте вращения двигателя, то есть с задействованной перегрузкой, соответственно дает преимущество, что тормозной момент, который двигатель прикладывает к приводным валам, когда силовой агрегат замкнут, будет гораздо меньше, чем при вытягивании на более высоких частотах, как выше, что во многих случаях может позволить тянуть двигатель, при этом скорость транспортного средства поддерживается или, по меньшей мере, не уменьшается больше, чем на некоторое значение, без расхода топлива во время вытягивания.
В отличие от этого, если определяется, что транспортному средству не потребуется торможение на спуске, то может быть предпочтительно совсем отключить двигатель от приводных валов, то есть разомкнуть силовой агрегат, в этом случае никакой тормозной момент от двигателя вообще не прикладывается, с недостатком в том, что топливо потребляется все время для поддержания двигателя работающим, но с преимуществом в том, что транспортное средство запасает больше кинетической энергии, например, перед непосредственно следующим подъемом.
В качестве альтернативы может быть выгодно двигаться на перегрузке с как можно большей выходной мощностью, чтобы запасти наибольшее возможное количество энергии перед последующим подъемом, например, после точки p3 на фиг. 4.
Спуск также может быть таким, что приведет к сниженной потребности в выходной мощности, но не достаточно крутым, чтобы дать транспортному средству возможность ускоряться/поддерживать скорость исключительно за счет гравитации, в этом случае необходимо некоторое участие от двигателя, например, 10-50 кВт, чтобы поддерживать или существенно поддерживать скорость транспортного средства, но необходимое участие по-прежнему достаточно небольшое для возможности передачи при движении на перегрузке.
То, сколько выходной мощности может доставляться двигателем с задействованной перегрузкой, зависит от того, где в области между n0 и n1 находится рабочая точка nd, поскольку крутящий момент (а отсюда выходная мощность, как и выше) значительно меняется с частотой вращения двигателя в рабочем диапазоне в тот момент (см. фиг. 3).
Определение подходящих режимов для управления транспортным средством также может управляться характером дороги после спуска. Если спуск сопровождается, например, длинным прямым отрезком, то может быть выгодно катиться с разомкнутым силовым агрегатом как можно дольше, прежде чем положительный крутящий момент снова потребуется для продвижения транспортного средства, и поэтому силовой агрегат снова замыкается.
В соответствии с настоящим изобретением, можно соответственно выполнить определение подходящей стратегии для того, как лучше всего управлять транспортным средством на спуске.
Если этап 202 определяет, что перегрузку следует задействовать, то процесс переходит к этапу 203, на котором перегрузка также задействуется, либо для вытягивания или торможения двигателем, либо для формирования толкающего крутящего момента.
В других случаях процесс переходит к этапу 204 для размыкания силового агрегата.
Настоящее изобретение также может использоваться для объединений стратегий во время спуска, например, транспортное средство, может управляться в первой части спуска, например, вплоть до точки p1 на фиг. 4 с задействованной перегрузкой, но в точке p1 двигатель специально отключается, чтобы позволить транспортному средству ускориться под собственным количеством движения до максимальной разрешенной скорости (с помощью системы управления), чтобы в точке p3 оно находилось в лучшем возможном состоянии для наиболее экономного управления на последующем подъеме. Процесс в соответствии с фиг. 2, поэтому переходит с этапа 203 или 204 соответственно на этап 205, который устанавливает, должна ли происходить смена режима.
На этапе 202 уже может быть определено, что смена режима в соответствии с этапом 205 должна произойти в некотором местоположении или после некоторого времени, но смена также может управляться другими факторами. Например, смена режима может быть выполнена с возможностью происходить, например, если определяется, что скорость транспортного средства в тот момент отклоняется от эталона Href скорости на пороговое значение Hthres. Hthres может быть процентом, например, 1, 2 или 5% от эталона Href, или быть абсолютным значением, то есть независимым от того, является ли разница в скорости увеличением или уменьшением, или может быть, например, только уменьшением. До тех пор, пока скорость транспортного средства не отличается от эталона Href скорости более, чем на упомянутую разницу, процесс остается на этапе 205.
В отличие от этого, если разница в скорости отклоняется от порогового значения Hthres, то происходит смена режима. Если скорость транспортного средства ниже эталонного значения, то есть отклоняется вниз более, чем на пороговое значение Hthres, то процесс может содержать определение, можно ли получить больше выходной мощности от двигателя с все еще задействованной перегрузкой. Если это так, то выходная мощность увеличивается.
Однако, если дополнительная выходная мощность не доступна при задействованной перегрузке, или если по некоторой другой причине необходимо переключение на пониженную передачу, то процесс переходит к этапу 206, где в соответствии с третьим режимом коробка передач переключается на более низкую передачу (более высокое передаточное число), чтобы предоставить больше выходной мощности и посредством этого позволить ускорить транспортное средство до более высокой скорости и/или сформировать большую движущую силу на будущем подъеме.
В альтернативном варианте осуществления процесс также может содержать возможность выбора, с этапа 203, переключения коробки передач на более высокое передаточное число в соответствии с режимом 3, соответственно там есть три альтернативы, которые нужно учитывать при определении подходящих стратегий для управления транспортным средством.
Изобретение описывается выше в отношении функции LA. В альтернативном варианте осуществления определенным внешним параметром вместо этого является сопротивление движению в тот момент, которое используется для определения, что имеется низкая потребность в выходной мощности. Сопротивление движению может вычисляться с помощью Fair+Frr+Feng+Fgb+Faxle/nav+F1 в уравнении (2) выше. В этом случае нельзя вычислить скорость, которую достигнет транспортное средство на спуске, поскольку длина спуска неизвестна. Вместо этого возможно, например, сделать первый выбор на основе сопротивления движению, с последующим непрерывным вычислением сопротивления движению (и/или определением скорости транспортного средства), чтобы сменить на спуске режим для управления транспортным средством, где это необходимо.
Упомянутый внешний параметр также может содержать встречный ветер или попутный ветер (который может вычисляться с использованием анемометра, установленного на транспортном средстве, или географических параметров ветра, переданных транспортному средству, например, по радиоканалу) или выпадение осадков (которое может определяться, например датчиком дождя или по использованию стеклоочистителя), в этом случае крупные осадки могут привести к тому, что транспортное средство должно достигать только нижней максимальной скорости на спуске.
При определении потребности в движущей силе также возможно использовать способ и систему для достижения параметра, который содержит и принимает во внимание рабочую обстановку транспортного средства при определении его возможности движущей силы. Определение таких параметров подробно описывается в параллельной заявке на патент Швеции "METOD FÖR BESTÄMNING AV DRIVKRAFTKAPACITET HOS ETT MOTORFORDON" (номер заявки 0950970-4) с таким же заявителем и датой подачи, что и настоящая заявка.
Процесс, изображенный на фиг. 2, также может зависеть от процесса высшего уровня, который непрерывно контролирует, есть ли какая-нибудь другая причина для увеличенной потребности в выходной мощности от двигателя. Например, переключение на более низкую передачу (более высокое передаточное число), режим 3, может быть выполнено, например, с возможностью происходить всегда, когда выполняется любой из следующих критериев: скорость транспортного средства увеличивается до уровня, заданного для функции автоматического поддержания скорости, водитель перемещает педаль акселератора или тормозную педаль, транспортное средство ускоряется свыше заданной скорости. Процесс тогда может вернуться к этапу 201 для нового определения потребности в движущей силе.
Настоящее изобретение описывается выше в отношении традиционной коробки передач. Однако изобретение также применимо в случае других типов коробки передач, например к коробкам передач CVT (Бесступенчатая трансмиссия), при условии, что коробку передач CVT можно установить в передаточное число, при котором транспортное средство на средней скорости движется при частоте вращения двигателя, которая ниже наименьшей скорости для плато крутящего момента у того числа.
Смена режима, как и выше, также может быть выполнена с возможностью управляться другими факторами. Транспортные средства вышеупомянутого типа обычно содержат систему очистки выхлопных газов для уменьшения выбросов от двигателя. Однако эти системы очистки выхлопных газов обычно требуют некоторой минимальной температуры, например 200°C, для их заданного функционирования. Также двигатель, который "тянется", то есть не снабжается топливом, не будет передавать теплые выхлопные газы для поддержания температуры в системе очистки выхлопных газов. Наоборот, воздух будет все время прокачиваться через двигатель, и этот относительно холодный воздух будет остужать систему очистки выхлопных газов.
Хотя вытягивание на перегрузке, как и выше, приводит к менее холодному воздуху, проходящему через двигатель, и поэтому к более медленному охлаждению, по-прежнему может происходить, например, на длинном спуске, что температура системы очистки выхлопных газов опускается до нежелательного низкого уровня и поэтому требует повышения. Это повышение температуры может достигаться, например, путем формирования толкающего крутящего момента при движении на перегрузке в соответствии с настоящим изобретением, поскольку более низкая передача означает более холодные выхлопные газы, чем при использовании перегрузки. Таким образом, температура системы очистки выхлопных газов и потребность в подогреве также может влиять на выбор подходящего режима.
Реферат
Группа изобретений относится к способу и устройству для управления транспортным средством, а также транспортному средству. Способ заключается в том, что при управлении транспортным средством в ситуации, когда существует или в пределах определенного времени возникнет сниженная потребность в движущей силе, определяют, следует ли управлять транспортным средством в соответствии с первым режимом или вторым режимом. Причем в первом режиме коробка передач переключается на низкое передаточное число, а во втором режиме двигатель внутреннего сгорания отключается от приводного вала. Система содержит средство для определения того, следует ли управлять транспортным средством в соответствии с первым режимом или вторым режимом, на основе внешнего параметра. Транспортное средство содержит вышеуказанную систему. Технический результат заключается в снижении расхода топлива. 3 н. и 16 з.п. ф-лы, 6 ил.
Формула
определяют, следует ли управлять транспортным средством в соответствии с первым режимом или вторым режимом.
Документы, цитированные в отчёте о поиске
Способ и система автоматического переключения режима свободного хода транспортного средства
Комментарии