Устройство и способ для управления ременной бесcтупенчато регулируемой трансмиссией для транспортного средства - RU2503864C1
Код документа: RU2503864C1
Чертежи


















Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу для управления ременной бесступенчато регулируемой трансмиссией транспортного средства, чтобы выполнять управление проскальзыванием ремня, при котором ремень, намотанный вокруг шкивов, проскальзывает на предварительно определенной скорости проскальзывания.
Уровень техники
Известный контроллер ременной бесступенчато регулируемой трансмиссии выполнен с возможностью осуществлять управление проскальзыванием ремня, при котором фактическое вторичное гидравлическое давление уменьшается по сравнению с фактическим вторичным гидравлическим давлением во время обычного управления, чтобы плавно перемещать ремень, намотанный вокруг шкивов, на предварительно определенной скорости проскальзывания посредством следующих этапов:
(a) наложения предварительно определенного синусоидального колебания на управляющее вторичное гидравлическое давление или колебание управляющего вторичного гидравлического давления, и
(b) выполнения управления проскальзыванием ремня посредством управления фактическим вторичным гидравлическим давлением на основе коэффициента колебательного компонента вследствие колебания, включенного вследствие колебания в фактическом вторичном гидравлическом давлении, и колебательного компонента, включенного в фактическое передаточное отношение.
Это исключает необходимость непосредственного определения скорости проскальзывания ремня и тем самым упрощает управление проскальзыванием ремня (см., например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
Патентный документ 1. WO 2009/007450 A2 (PCT/EP2008/059092)
Сущность изобретения
Проблемы, разрешаемые изобретением
Тем не менее, известный контроллер ременной бесступенчато регулируемой трансмиссии не может извлекать колебательный компонент вследствие колебания из базового компонента характеристики флуктуации фактического передаточного отношения, которая соответствует состоянию движения, когда скорость работы трансмиссии в качестве скорости изменения передаточного отношения является высокой. Вследствие этого, посредством выполнения управления проскальзыванием ремня с использованием, в качестве оцененного значения состояния проскальзывания ремня, коэффициента колебательных компонентов, включенных в фактическое передаточное отношение и в фактическое вторичное гидравлическое давление, чтобы значение совпадало с предварительно определенным значением, ремень может значительно скользить в зависимости от абсолютной величины входного крутящего момента для контроллера ременной бесступенчато регулируемой трансмиссии вследствие недостаточной точности управления, вызываемой посредством погрешности в оцененном состоянии проскальзывания ремня.
С учетом вышеизложенной проблемы, настоящее изобретение направлено на предоставление устройства и способа управления ременной бесступенчато регулируемой трансмиссией транспортного средства, которые позволяют повышать преимущества снижения расхода энергии привода вследствие снижения трения ремня посредством расширения рабочего диапазона, в котором управление проскальзыванием ремня разрешается, при поддержании точности оцененного состояния проскальзывания ремня.
Средство для решения проблемы
С учетом достижения вышеуказанной цели ременная бесступенчато регулируемая трансмиссия согласно настоящему изобретению содержит первичный шкив и вторичный шкив, вокруг которых намотан ремень, чтобы управлять передаточным отношением посредством управления первичным гидравлическим давлением и вторичным гидравлическим давлением. Устройство управления, следовательно, содержит средство управления проскальзыванием ремня, средство установки ограничения и средство ограничения скорости работы трансмиссии. Средство управления проскальзыванием ремня выполнено с возможностью колебания вторичного гидравлического давления и извлечения колебательного компонента вследствие колебания из базового компонента фактического передаточного отношения, когда скорость работы трансмиссии меньше предварительно определенного значения, с тем чтобы управлять вторичным гидравлическим давлением на основе разности фаз между колебательным компонентом фактического передаточного отношения, и колебательным компонентом фактического вторичного гидравлического давления вследствие колебания, включенного в фактическое вторичное гидравлическое давление, при этом скорость работы трансмиссии является скоростью изменения передаточного отношения. Средство установки ограничения выполнено с возможностью решения, ограничивать ли ускорение транспортного средства. Средство ограничения скорости работы трансмиссии выполнено с возможностью ограничивать скорость работы трансмиссии до значения меньше предварительно определенного значения, когда средство установки ограничения решает ограничить ускорение транспортного средства. Средство управления проскальзыванием ремня выполнено с возможностью разрешения управления проскальзыванием ремня, когда средство ограничения скорости работы трансмиссии ограничивает скорость работы трансмиссии до предварительно определенного значения.
Преимущества изобретения
Средство управления проскальзыванием ремня выполнено с возможностью разрешать управление проскальзыванием ремня, когда скорость работы трансмиссии в качестве скорости изменения передаточного отношения меньше предварительно определенного значения. Тем самым, при высокой оцененной точности состояния проскальзывания ремня, потребление энергии приведения в движение может быть уменьшено посредством снижения трения ремня, в то время как при низкой оцененной точности состояния проскальзывания ремня, большое проскальзывание ремня во время управления проскальзыванием ремня может предотвращаться.
Помимо этого, когда средство установки ограничения решает, что ускорение транспортного средства может быть ограничено, средство ограничения скорости работы трансмиссии ограничивает скорость работы трансмиссии до значения меньше предварительно определенного значения и разрешает управление проскальзыванием ремня, чтобы расширить рабочий диапазон, в котором разрешается управление проскальзыванием ремня. Т.е. рабочий диапазон может быть расширен на разрешенный диапазон управления проскальзыванием ремня при условии разрешения предельного ускорения по сравнению с рабочим диапазоном при условии скорости работы трансмиссии, которое зависит от скорости изменения передаточного отношения, которое возникает в состоянии движения. Соответственно, оцененная точность состояния проскальзывания ремня может поддерживаться посредством ограничения скорости работы трансмиссии до значения меньше предварительно определенного значения в добавленном рабочем диапазоне.
Таким образом, появляется возможность эффективно уменьшать потребление энергии приведения в движение вследствие снижения трения ремня посредством расширения рабочего диапазона, в котором управление проскальзыванием ремня разрешается, при поддержании оцененной точности состояния проскальзывания ремня.
Краткое описание чертежей
Фиг.1 показывает всю систему из системы приведения в движение и системы управления транспортного средства, включающего ременную бесступенчато регулируемую трансмиссию, к которой применяется устройство и способ управления согласно первому варианту осуществления.
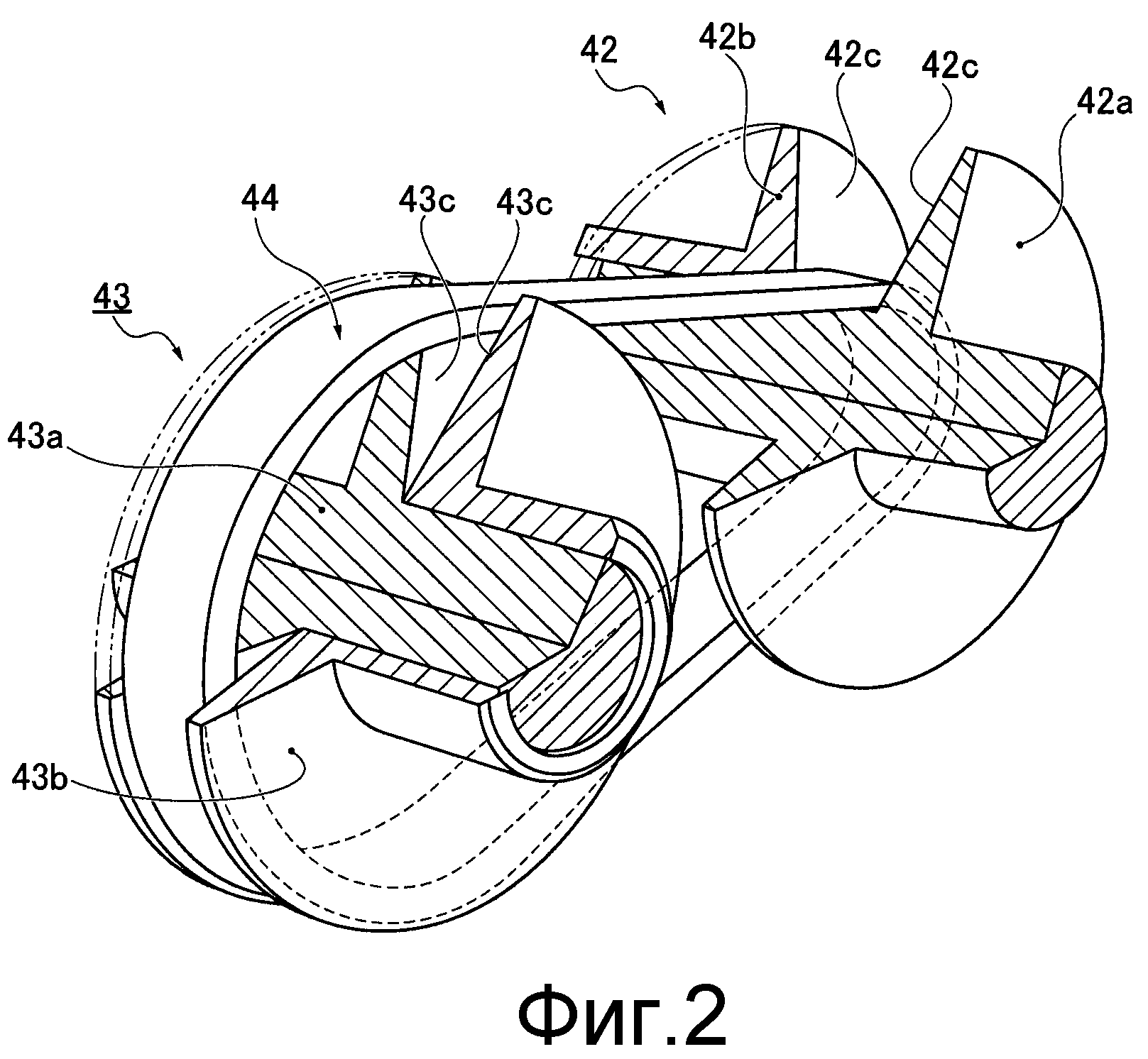
Фиг.2 является видом в перспективе механизма ременной бесступенчато регулируемой трансмиссии, к которому применяется устройство и способ управления согласно первому варианту осуществления.
Фиг.3 является видом в перспективе части ремня механизма ременной бесступенчато регулируемой трансмиссии, к которому применяется устройство и способ управления согласно первому варианту осуществления.
Фиг.4 является блок-схемой управления для управления давлением в магистрали и управления вторичным гидравлическим давлением (обычного управления/управления проскальзыванием ремня), выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.5 является блок-схемой последовательности операций способа для базового процесса переключения между обычным управлением и управлением проскальзыванием ремня (=BSC) для вторичного гидравлического давления, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.6 является блок-схемой последовательности операций способа для всего процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.7 является блок-схемой последовательности операций способа для процесса ограничения крутящего момента из процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.8 является блок-схемой последовательности операций способа для процесса колебания и коррекции вторичного гидравлического давления из процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.9 является блок-схемой последовательности операций способа для процесса возврата от управления проскальзыванием ремня к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.10 является блок-схемой последовательности операций способа для процесса ограничения крутящего момента процесса возврата к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.11 является блок-схемой последовательности операций способа для процесса ограничения для скорости работы трансмиссии для передаточного отношения, чтобы ограничивать целевую первичную частоту вращения в процессе возврата к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.12 является блок-схемой последовательности операций способа для всего процесса определения разрешения BSC, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.13 показывает пороговую характеристику в качестве порогового значения 1 для открытия дросселя, используемого, когда переключатель экономичного режима включается в процессе определения разрешения BSC, выполняемом посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.14 показывает пороговую характеристику в качестве порогового значения 2 для открытия дросселя, используемого, когда переключатель экономичного режима выключается в процессе определения разрешения BSC, выполняемом посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Фиг.15 является временной диаграммой характеристики фактического передаточного отношения и характеристики целевого передаточного отношения, когда работа трансмиссии изменяется на небольшой скорости изменения работы трансмиссии во время управления проскальзыванием ремня.
Фиг.16 является временной диаграммой характеристики фактического передаточного отношения и характеристики целевого передаточного отношения, когда работа трансмиссии изменяется на большой скорости изменения работы трансмиссии во время управления проскальзыванием ремня.
Фиг.17 является временной диаграммой для соответствующих характеристик определения ограничения, целевого передаточного отношения, флага BSC-операции (для сравнения), ограниченного целевого передаточного отношения и флага ограниченной BSC-операции, когда целевое передаточное отношение колеблется посредством незначительного изменения водителем открытия акселератора.
Фиг.18 является графиком, показывающим преимущества расширенного рабочего диапазона BSC согласно первому варианту осуществления по сравнению с целевой скоростью изменения работы трансмиссии, не ограничиваемой активно.
Фиг.19 является временной диаграммой соответствующих характеристик флага BSC-операции, флага запрещения F/B по вторичному давлению, открытия акселератора, скорости транспортного средства, крутящего момента двигателя, Ratio, вторичного гидравлического давления, величины коррекции тока SEC_SOL и разности фаз между колебанием вторичного давления и колебанием Ratio в окружении движения во время переключения управления от обычного управления, управления проскальзыванием ремня, управления возвратом к обычному управлению.
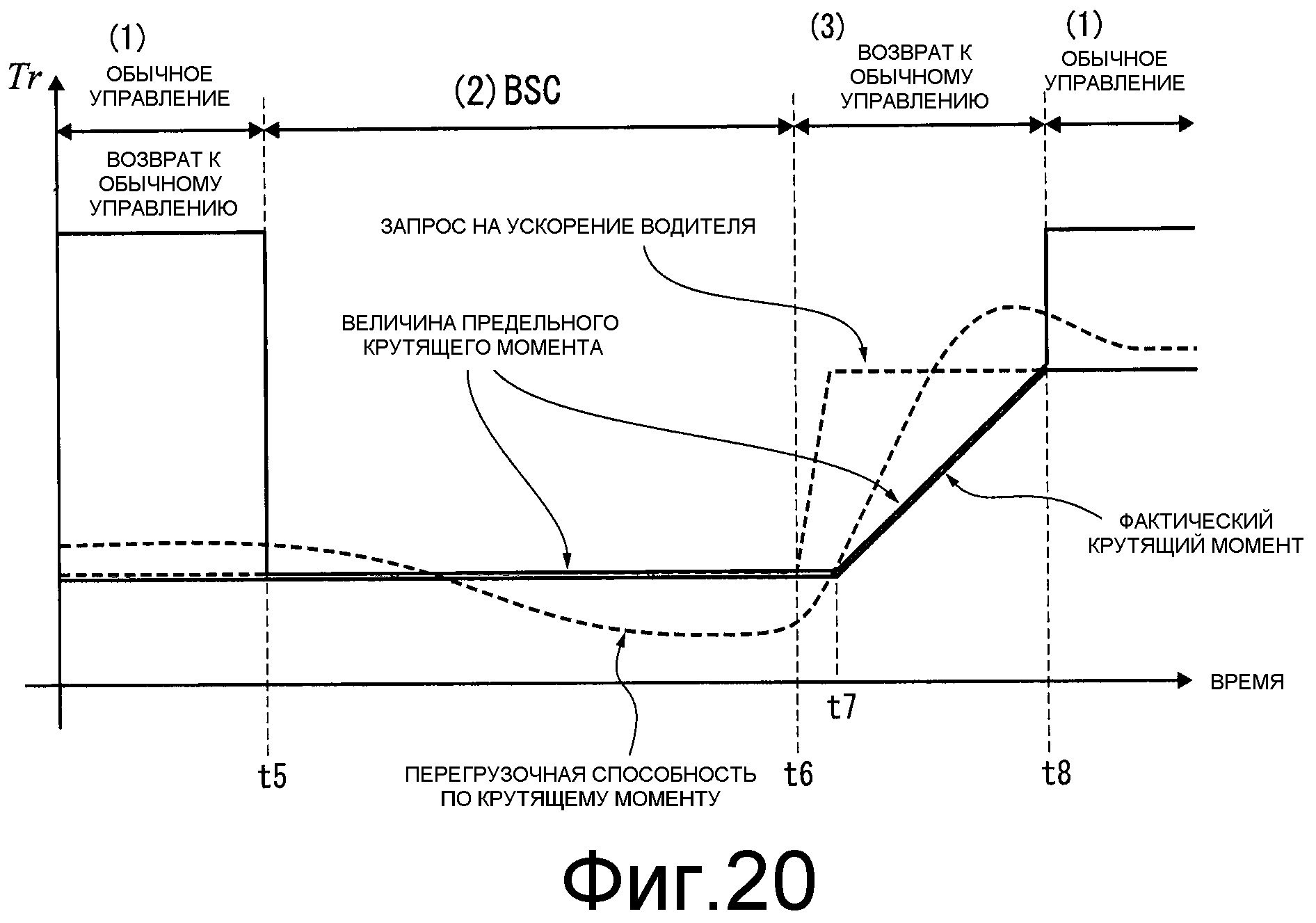
Фиг.20 является временной диаграммой характеристик запрошенного водителем крутящего момента, величины предельного крутящего момента, перегрузочной способности по крутящему моменту и фактического крутящего момента, чтобы иллюстрировать управление предельным крутящим моментом на основе задержки по крутящему моменту, используемой при управлении возвратом от управления проскальзыванием ремня к обычному управлению.
Подробное описание вариантов осуществления
В дальнейшем в этом документе, наилучший режим, чтобы выполнять устройство и способ управления для ременной бесступенчато регулируемой трансмиссии, описывается с использованием первого варианта осуществления со ссылкой на прилагаемые чертежи.
Первый вариант осуществления
Во-первых, описывается структура устройства. Фиг.1 показывает всю систему из системы приведения в движение и системы управления транспортного средства, включающего ременную бесступенчато регулируемую трансмиссию, к которой применяется устройство и способ управления согласно первому варианту осуществления. Фиг.2 является видом в перспективе механизма ременной бесступенчато регулируемой трансмиссии, к которому применяется устройство и способ управления согласно первому варианту осуществления. Фиг.3 является видом в перспективе части ремня механизма ременной бесступенчато регулируемой трансмиссии, к которому применяется устройство и способ управления согласно первому варианту осуществления. Далее структуры системы описываются со ссылкой на фиг.1-3.
На фиг.1 система приведения в движение транспортного средства, включающего ременную бесступенчато регулируемую трансмиссию, содержит двигатель 1, преобразователь 2 крутящего момента, механизм 3 переключения переднего/заднего хода, механизм 4 ременной бесступенчато регулируемой трансмиссии, конечный понижающий механизм 5 и ведущие колеса 6, 6.
Выходной крутящий момент двигателя 1 является управляемым посредством сигнала управления двигателем, подаваемого извне, в дополнение к операции ускорения водителя. Двигатель 1 включает в себя актуатор 10 управления выходным крутящим моментом, чтобы управлять выходным крутящим моментом посредством операции открытия/закрытия дроссельного клапана, операции отсечки топлива и т.д. Скорость изменения (=интенсивность изменения) входного крутящего момента в ременную бесступенчато регулируемую трансмиссию 4 управляется посредством управления выходным крутящим моментом двигателя 1.
Преобразователь 2 крутящего момента является пусковым элементом с функцией увеличения крутящего момента и включает в себя блокировочную муфту 20, чтобы иметь возможность непосредственно соединять выходной вал 11 двигателя (=входной вал преобразователя крутящего момента) и выходной вал 21 преобразователя крутящего момента. Преобразователь 2 крутящего момента состоит из рабочего колеса 23 турбины, соединенного с выходным валом 11 двигателя через кожух 22 преобразователя, центробежного насоса 24, соединенного с выходным валом 21 преобразователя крутящего момента, и статора 26, предоставляемого через одностороннюю муфту 25.
Механизм 3 переключения переднего/заднего хода должен переключать направление вращения, вводимое в механизм 4 ременной бесступенчато регулируемой трансмиссии, между обычным направлением вращения во время переднего хода и обратным направлением вращения во время заднего хода. Механизм 3 переключения переднего/заднего хода включает в себя шестерню 30 планетарной передачи с двумя сателлитами, муфту 31 переднего хода и задний тормоз 32. Солнечная шестерня из шестерни 30 планетарной передачи с двумя сателлитами соединяется с выходным валом 21 преобразователя крутящего момента, и ее водило соединяется с входным трансмиссионным валом 40. Муфта 31 переднего хода закрепляется во время заднего хода, чтобы фиксировать коронную шестерню шестерни 30 планетарной передачи с двумя сателлитами к корпусу.
Механизм 4 ременной бесступенчато регулируемой трансмиссии имеет функцию бесступенчато регулируемой трансмиссии, чтобы бесступенчато варьировать передаточное отношение посредством изменения радиуса контакта ремня. Передаточное отношение является соотношением входной частоты вращения входного трансмиссионного вала 40 и выходной частоты вращения выходного трансмиссионного вала 41. Механизм 4 ременной бесступенчато регулируемой трансмиссии включает в себя первичный шкив 42, вторичный шкив 43 и ремень 44. Первичный шкив 42 состоит из неподвижного шкива 42a и скользящего шкива 42b. Скользящий шкив 42b плавно перемещается посредством первичного гидравлического давления, введенного в камеру 45 первичного гидравлического давления. Вторичный шкив 43 состоит из неподвижного шкива 43a и скользящего шкива 43b. Скользящий шкив 43b плавно перемещается посредством первичного гидравлического давления, введенного в камеру 46 вторичного гидравлического давления. Ремень 44, как показано на фиг.2, оборачивается вокруг V-образных желобообразующих поверхностей 42c, 42d первичного шкива 42 и V-образных желобообразующих поверхностей 43c, 43d вторичного шкива 43. На фиг.3 ремень 44 формируется из двух многослойных колец 44a, 44a, из которых большое число колец располагается слоями изнутри к внешней стороне, а также большого числа элементов 44b прессованных обрезных пластин, размещенных между двумя многослойными кольцами 44a, 44a и соединенных между собой в форме кольца. Элементы 44b включают в себя, на обеих сторонах, боковые поверхности 44c, 44c, которые входят в контакт с желобообразующими поверхностями 42c, 42d первичного шкива 42 и желобообразующими поверхностями 43c, 43d вторичного шкива 43.
Конечный понижающий механизм 5 замедляет выходное вращение трансмиссии из выходного трансмиссионного вала 41 механизма 4 ременной бесступенчато регулируемой трансмиссии и предоставляет дифференциальную функцию для него, чтобы передавать на правое и левое ведущие колеса 6, 6. Конечный понижающий механизм 5 размещается между выходным трансмиссионным валом 41, промежуточным валом 50, правым и левым ведущими валами 51, 51 и включает в себя первую передачу 52, вторую передачу 53, третью передачу 54 и четвертую передачу 55 с функцией замедления и дифференциал 56 шестерни с дифференциальной функцией.
Система управления ременной бесступенчато регулируемой трансмиссией содержит модуль 7 управления гидравлическим давлением трансмиссии и модуль 8 CVT-управления, как показано на фиг.1.
Модуль 7 управления гидравлическим давлением трансмиссии является модулем управления гидравлическим давлением, чтобы формировать первичное гидравлическое давление, введенное в камеру 45 первичного гидравлического давления, и вторичное гидравлическое давление, введенное в камеру 46 вторичного гидравлического давления. Модуль 7 управления гидравлическим давлением трансмиссии содержит масляный насос 70, клапан 71 регулятора, соленоид 72 давления в магистрали, регулирующий клапан 73 трансмиссии, декомпрессионный клапан 74, соленоид 75 вторичного гидравлического давления, сервосистему 76, управляющий клапан 77 трансмиссии и шаговый электромотор 78.
Клапан 71 регулятора использует давление нагнетания из масляного насоса 70 в качестве источника давления, чтобы регулировать давление PL в магистрали. Клапан 71 регулятора включает в себя соленоид 72 давления в магистрали, чтобы регулировать давление масла из масляного насоса 70 до предварительно определенного давления PL в магистрали в ответ на команду из модуля 8 CVT-управления.
Регулирующий клапан 73 трансмиссии использует давление PL в магистрали, сформированное посредством клапана 71 регулятора, в качестве источника давления, чтобы регулировать первичное гидравлическое давление, введенное в камеру 45 первичного гидравлического давления. Золотник 73a регулирующего клапана 73 трансмиссии соединяется с сервосистемой 76, составляющей механизм механической обратной связи, и управляющий клапан 77 трансмиссии, соединенный с одним концом сервосистемы 76, приводится в действие посредством шагового электромотора 78, так что регулирующий клапан трансмиссии принимает обратную связь положения перемещения (фактическое передаточное отношение шкивов) из скользящего шкива 42b первичного шкива 42, соединенного с другим концом сервосистемы 76. Т.е. в ходе работы трансмиссии, когда шаговый электромотор 78 приводится в действие в ответ на команду из модуля 8 CVT-управления, положение золотника 73a регулирующего клапана 73 трансмиссии изменяется, чтобы подавать/сбрасывать давление PL в магистрали в/из камеры 45 первичного гидравлического давления, чтобы регулировать первичное гидравлическое давление, чтобы обнаруживать целевое передаточное отношение, управляемое в положении привода шагового электромотора 78. При завершении работы трансмиссии, золотник 73a удерживается в закрытом положении в ответ на смещение сервосистемы 76.
Декомпрессионный клапан 74 использует давление PL в магистрали, сформированное посредством клапана 71 регулятора, в качестве источника давления, чтобы регулировать вторичное гидравлическое давление, введенное в камеру 46 вторичного гидравлического давления, посредством снижения давления. Декомпрессионный клапан 74 содержит соленоид 75 вторичного гидравлического давления, чтобы уменьшать давление PL в магистрали до управляющего вторичного гидравлического давления в соответствии с командой из модуля 8 CVT-управления.
Модуль 8 CVT-управления выполнен с возможностью осуществлять различное управление, к примеру, управление передаточным отношением, чтобы выводить в шаговый электромотор 78 команду управления, чтобы обнаруживать целевое передаточное отношение в соответствии со скоростью транспортного средства, состоянием открытия дросселя, а также управление давлением в магистрали, чтобы выводить в соленоид 72 давления в магистрали команду управления, чтобы обнаруживать целевое давление в магистрали в соответствии с состоянием открытия дросселя и т.п., управление вторичным гидравлическим давлением, чтобы выводить в соленоид 75 вторичного гидравлического давления команду управления, чтобы обнаруживать целевое осевое усилие вторичного шкива в соответствии с входным крутящим моментом трансмиссии и т.п., управление переключением переднего и заднего хода, чтобы управлять закреплением и высвобождением муфты 31 переднего хода и заднего тормоза 32, и управление блокировкой, чтобы управлять закреплением и высвобождением блокировочной муфты 20. Модуль 8 CVT-управления принимает информацию различных датчиков и информацию переключателей из датчика 80 первичной частоты вращения, датчика 81 вторичной частоты вращения, датчика 82 вторичного гидравлического давления, датчика 83 температуры масла, переключателя 84 ингибитора, тормозного переключателя 85, датчика 86 открытия акселератора и других датчиков и переключателей 87. Дополнительно, он принимает информацию крутящего момента из модуля 88 управления двигателем и выводит запрос крутящего момента в модуль 88 управления двигателем. Помимо этого, он принимает информацию переключателей из переключателя 89 экономичного режима (переключателя), чтобы давать возможность водителю выбирать обычный режим вождения или экономичный режим вождения.
Фиг.4 является блок-схемой управления для управления давлением в магистрали и управления вторичным гидравлическим давлением (обычного управления/управления проскальзыванием ремня), выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Система управления гидравлическим давлением модуля 8 CVT-управления в первом варианте осуществления содержит модуль 90 вычисления базового гидравлического давления, контроллер 91 давления в магистрали, контроллер 92 вторичного гидравлического давления, контроллер 93 синусоидальных колебаний и модуль 94 коррекции вторичного гидравлического давления, как показано на фиг.4.
Модуль 90 вычисления базового гидравлического давления включает в себя модуль 90a вычисления входного крутящего момента, чтобы вычислять входной крутящий момент трансмиссии на основе информации крутящего момента (частоты вращения двигателя, времени впрыска топлива и т.п.) из модуля 88 управления двигателем (фиг.1), модуль 90b вычисления базового вторичного осевого усилия, чтобы вычислять базовое вторичное осевое усилие (силу зажима ремня, необходимую для вторичного шкива 43) из входного крутящего момента трансмиссии, полученного посредством модуля 90a вычисления входного крутящего момента, модуль 90c вычисления требуемой разности осевых усилий трансмиссии, чтобы вычислять разность осевых усилий, требуемую для трансмиссии (разность в силе зажима ремня между первичным и вторичным шкивами 42, 43), модуль 90d коррекции, чтобы корректировать вычисленное базовое вторичное осевое усилие на основе требуемой разности осевых усилий для трансмиссии, и преобразователь 90e вторичного гидравлического давления, чтобы преобразовывать скорректированное вторичное осевое усилие в целевое вторичное гидравлическое давление. Он дополнительно включает в себя модуль 90f вычисления базового первичного осевого усилия, чтобы вычислять базовое первичное осевое усилие (силу зажима ремня, требуемую для первичного шкива 42) из входного крутящего момента трансмиссии, вычисленного посредством модуля 90a вычисления входного крутящего момента, модуль 90g коррекции, чтобы корректировать вычисленное базовое первичное осевое усилие на основе требуемой разности осевых усилий для трансмиссии, вычисленной посредством модуля 90c вычисления требуемой разности осевых усилий трансмиссии, и преобразователь 90h первичного гидравлического давления, чтобы преобразовывать скорректированное первичное осевое усилие в целевое первичное гидравлическое давление.
Контроллер 91 давления в магистрали включает в себя модуль 91a определения целевого давления в магистрали, чтобы сравнивать вывод целевого первичного гидравлического давления из преобразователя 90h первичного гидравлического давления с выводом управляющего вторичного гидравлического давления из контроллера 92 вторичного гидравлического давления и задавать целевое давление в магистрали равным целевому первичному гидравлическому давлению, когда "целевое первичное гидравлическое давление≥управляющее вторичное гидравлическое давление", и задавать целевое давление в магистрали равным вторичному гидравлическому давлению, когда "целевое первичное гидравлическое давление<управляющее вторичное гидравлическое давление", и преобразователь 91b гидравлического давления в ток, чтобы преобразовывать целевое давление в магистрали, определенное посредством модуля 91a определения целевого давления в магистрали, в значение тока, применяемого к соленоиду, и выводить преобразованное значение управляющего тока в соленоид 72 давления в магистрали клапана 71 регулятора.
При обычном управлении контроллер 92 вторичного гидравлического давления выполняет управление с обратной связью с использованием фактического вторичного гидравлического давления, определенного посредством датчика 82 вторичного гидравлического давления, чтобы обнаруживать управляющее вторичное гидравлическое давление, в то время как при управлении проскальзыванием ремня он выполняет открытое управление без использования фактического вторичного гидравлического давления, чтобы обнаруживать управляющее вторичное гидравлическое давление. Он включает в себя фильтр 92a нижних частот, через который целевое вторичное гидравлическое давление из преобразователя 90e вторичного гидравлического давления фильтруется, модуль 92b вычисления отклонения, чтобы вычислять отклонение между фактическим вторичным гидравлическим давлением и целевым вторичным гидравлическим давлением, модуль 92c задания нулевого отклонения, чтобы обнулять отклонение, переключатель 92d отклонения, чтобы избирательно переключаться между вычисленным отклонением и нулевым отклонением, и модуль 92e определения интегрированного коэффициента усиления, чтобы определять интегрированный коэффициент усиления из температуры масла. Дополнительно, он включает в себя умножитель 92f, чтобы умножать интегрированный коэффициент усиления из модуля 92e определения интегрированного коэффициента усиления и отклонение из переключателя 92d отклонения, модуль 92g интегрирования, чтобы интегрировать FB-интегрированную величину управления из умножителя 92f, сумматор 92h, чтобы прибавлять интегрированную FB-интегрированную величину управления к целевому вторичному гидравлическому давлению из преобразователя 90e вторичного гидравлического давления, и модуль 92i ограничения, чтобы задавать верхние и нижние пределы равными суммированному значению, чтобы получать управляющее вторичное гидравлическое давление (упоминаемое как базовое вторичное гидравлическое давление при управлении проскальзыванием ремня). Дополнительно, он включает в себя сумматор 92j колебаний, чтобы прибавлять команду синусоидальных колебаний к базовому вторичному гидравлическому давлению при управлении проскальзыванием ремня, модуль 92k коррекции гидравлического давления, чтобы корректировать колеблющееся базовое вторичное гидравлическое давление посредством величины коррекции вторичного гидравлического давления до управляющего вторичного гидравлического давления, и преобразователь 92m гидравлического давления в ток, чтобы преобразовывать управляющее вторичное гидравлическое давление в значение тока, применяемого к соленоиду, чтобы выводить преобразованное значение управляющего тока в соленоид 75 вторичного гидравлического давления. Следует отметить, что переключатель 92d отклонения выполнен с возможностью выбирать вычисленное отклонение, когда флаг BSC-операции равняется 0 (во время обычного управления), и выбирать нулевое отклонение, когда флаг BSC-операции равняется 1 (во время управления проскальзыванием ремня).
Контроллер 93 синусоидальных колебаний колеблет вторичное гидравлическое давление посредством применения синусоидального колебания гидравлического давления к управляющему вторичному гидравлическому давлению во время управления проскальзыванием ремня. Он включает в себя осциллятор 93a синусоидальных колебаний, чтобы определять частоту колебаний и амплитуду колебаний, подходящую для обнаружения разности фаз между колебательным компонентом вследствие колебания, включенного в фактическое вторичное гидравлическое давление, и колебательным компонентом вследствие колебания, включенного в фактическое передаточное отношение, и применять синусоидальное колебание гидравлического давления в соответствии с определенной частотой и амплитудой, модуль 93b задания нулевого колебания, чтобы не применять синусоидальное колебание гидравлического давления, и переключатель 93c колебаний, чтобы избирательно переключаться между колебанием гидравлического давления и нулевым колебанием. Следует отметить, что переключатель 93c колебаний выполнен с возможностью выбирать нулевое колебание, когда флаг BSC-операции равняется 0 (во время обычного управления), и выбирать синусоидальное колебание гидравлического давления, когда флаг BSC-операции равняется 1 (во время управления проскальзыванием ремня).
Во время управления проскальзыванием ремня модуль 94 коррекции вторичного гидравлического давления снижает вторичное гидравлическое давление на основе разности фаз между колебательным компонентом вследствие колебания, включенного в фактическое вторичное гидравлическое давление, и колебательным компонентом, включенным в фактическое передаточное отношение. Модуль 94 коррекции вторичного гидравлического давления включает в себя модуль 94a вычисления фактического передаточного отношения, чтобы вычислять фактическое передаточное отношение Ratio из соотношения первичной частоты Npri вращения датчика 80 первичной частоты вращения и вторичной частоты Nsec вращения датчика 81 вторичной частоты вращения, первый полосовой фильтр 94b, чтобы извлекать колебательный компонент из сигнала, представляющего фактическое вторичное гидравлическое давление Psec, полученное с помощью датчика 82 вторичного гидравлического давления, и второй полосовой фильтр 94c, чтобы извлекать колебательный компонент из расчетных данных посредством модуля 94a вычисления фактического передаточного отношения. Он дополнительно включает в себя умножитель 94d, чтобы умножать колебательные компоненты, извлеченные посредством обоих полосовых фильтров 94b, 94c, фильтр 94e нижних частот, чтобы извлекать информацию разности фаз из результата умножения, модуль 94f определения величины коррекции вторичного гидравлического давления, чтобы определять величину коррекции вторичного гидравлического давления на основе информации разности фаз из фильтра 94e нижних частот, модуль 94g задания нулевой величины коррекции, чтобы обнулять величину коррекции вторичного гидравлического давления, и переключатель 94h величины коррекции, чтобы избирательно переключаться между величиной коррекции вторичного гидравлического давления и нулевой величиной коррекции. Следует отметить, что переключатель 94h величины коррекции выполнен с возможностью выбирать нулевую величину коррекции, когда флаг BSC-операции равняется 0 (во время обычного управления), и выбирать величину коррекции вторичного гидравлического давления, когда флаг BSC-операции равняется 1 (во время управления проскальзыванием ремня).
Фиг.5 является базовой блок-схемой последовательности операций способа для процесса переключения между обычным управлением и управлением проскальзыванием ремня (=BSC) для вторичного гидравлического давления, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Далее описываются соответствующие этапы на фиг.5.
На этапе S1 после запуска посредством поворота ключа зажигания, определения отсутствия разрешения BSC на этапе S2 или процесса возврата к обычному управлению на этапе S5, механизм 4 ременной бесступенчато регулируемой трансмиссии управляется обычным образом, и затем последовательность операций переходит к этапу S2. Во время обычного управления флаг BSC-операции задается равным нулю.
На этапе S2 после обычного управления на этапе S1, выполняется определение того, удовлетворяются или нет все следующие условия разрешения BSC. Если результатом является "Да" (все условия разрешения BSC удовлетворяются), последовательность операций переходит к этапу S3, выполняется управление проскальзыванием ремня (BSC). Если результатом является "Нет" (одно из условий разрешения BSC не удовлетворяется), последовательность операций возвращается к этапу S1, продолжается обычное управление. Пример условий разрешения BSC заключается в следующем.
(1) Скорость изменения перегрузочной способности по передаваемому крутящему моменту механизма 4 ременной бесступенчато регулируемой трансмиссии является стабильной и небольшой.
Это условие (1) определяется, например, посредством удовлетворения следующих двух условий.
a. "|скорость изменения управляющего крутящего момента|<предварительно определенное значение"
b. |скорость изменения управляющего передаточного отношения|<предварительно определенное значение
В данном документе, скорость изменения управляющего передаточного отношения соответствует скорости работы трансмиссии в качестве скорости изменения передаточного отношения посредством ременной бесступенчато регулируемой трансмиссии 4. Условие "|скорость изменения управляющего крутящего момента|<предварительно определенное значение" удовлетворяется не только посредством состояния движения или транспортного средства, но также и посредством принудительного ограничения ускорения транспортного средства на основе удовлетворения условия разрешения предельного ускорения.
(2) Оцененная точность входного крутящего момента в первичный шкив 42 находится в пределах надежного диапазона.
Это условие (2), например, определяется на основе информации крутящего момента (оцененного крутящего момента двигателя) из модуля 88 управления двигателем, состояния блокировки преобразователя 2 крутящего момента, рабочего состояния нажатия педали тормоза, положения в рамках диапазона и т.п.
(3) Вышеуказанные разрешенные условия (1), (2) продолжаются в течение предварительно определенного времени.
На этапе S2 определяется то, удовлетворяются или нет все вышеуказанные условия (1), (2), (3).
На этапе S3 после определения разрешения BSC на этапе S2 или определения продолжения BSC на этапе S4, управление проскальзыванием ремня (фиг.6-8) выполняется для того, чтобы уменьшать входной момент для ремня 44 механизма 4 ременной бесступенчато регулируемой трансмиссии и поддерживать ремень 44 в так называемом состоянии микропроскальзывания. Затем, последовательность операций переходит к этапу S4. Во время управления проскальзыванием ремня флаг операции задается равным 1.
На этапе S4 после управления проскальзыванием ремня на этапе S3, выполняется определение того, удовлетворяются или нет все следующие условия продолжения BSC. Если результатом является "Да" (все условия продолжения BSC удовлетворяются), последовательность операций возвращается к этапу S3, продолжается управление проскальзыванием ремня (BSC). Если результатом является "Нет" (одно из условий разрешения BSC не удовлетворяется), последовательность операций возвращается к этапу S1, продолжается обычное управление. Пример условий продолжения BSC заключается в следующем.
(1) Скорость изменения перегрузочной способности по передаваемому крутящему моменту механизма 4 ременной бесступенчато регулируемой трансмиссии является небольшой и стабильной.
Это условие (1) определяется, например, посредством удовлетворения следующих двух условий.
a. "|скорость изменения управляющего крутящего момента|<предварительно определенное значение"
b. |скорость изменения управляющего передаточного отношения|<предварительно определенное значение
В данном документе, условие "|скорость изменения управляющего крутящего момента|<предварительно определенное значение" удовлетворяется не только посредством состояния вождения или транспортного средства, но также и посредством принудительного ограничения на ускорение транспортного средства на основе удовлетворения условия разрешения предельного ускорения.
(2) Оцененная точность входного крутящего момента в первичный шкив 42 находится в пределах надежного диапазона.
Это условие (2), например, определяется на основе информации крутящего момента (оцененного крутящего момента двигателя) из модуля 88 управления двигателем, состояния блокировки преобразователя 2 крутящего момента, рабочего состояния нажатия педали тормоза, положения в рамках диапазона и т.п. Определяется то, удовлетворяются или нет вышеуказанные условия (1), (2). Т.е. отличие между условиями разрешения BSC и условиями продолжения BSC заключается в том, что условия продолжения BSC исключают условие продолжения (3) из условий разрешения BSC.
На этапе S5 после определения того, что одно из условий продолжения BSC не удовлетворено, процесс возврата к обычному управлению (фиг.9-11) выполняется для того, чтобы предотвращать проскальзывание ремня 4, когда управление проскальзыванием ремня возвращается к обычному управлению. При завершении процесса, последовательность операций возвращается к этапу S1 и переключается на обычное управление.
Фиг.6 является блок-схемой последовательности операций способа для всего процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.7 является блок-схемой последовательности операций способа для процесса ограничения крутящего момента из процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.8 является блок-схемой последовательности операций способа для процесса колебания и коррекции вторичного гидравлического давления из процесса управления проскальзыванием ремня, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Во-первых, как очевидно из фиг.6, во время управления проскальзыванием ремня, при котором определение разрешения BSC и определение продолжения BSC продолжаются, процесс запрещения управления с обратной связью (этап S31), в котором управляющее вторичное гидравлическое давление получается с использованием фактического вторичного гидравлического давления, процесс ограничения крутящего момента (этап S32) в качестве подготовки к возврату к обычному управлению, и процесс колебания и коррекции вторичного гидравлического давления (этап S33) для управления проскальзыванием ремня выполняются одновременно.
На этапе S31 во время управления проскальзыванием ремня, при котором определение разрешения BSC и определение продолжения BSC продолжаются, управление с обратной связью, при котором управляющее вторичное гидравлическое давление получается с использованием фактического вторичного гидравлического давления, определенного посредством датчика 82 вторичного гидравлического давления, запрещается.
Т.е. управление гидравлическим давлением с обратной связью при обычном управлении запрещается во время управления проскальзыванием ремня, поскольку информация фактического вторичного гидравлического давления содержит колебательный компонент вследствие колебания, и переключается на управление базовым вторичным гидравлическим давлением с использованием нулевого отклонения. Управление гидравлическим давлением с обратной связью возвращается, когда управление проскальзыванием ремня переключается на обычное управление.
На этапе S32 во время управления проскальзыванием ремня, при котором определение разрешения BSC и определение продолжения BSC продолжаются, выполняется процесс ограничения крутящего момента на фиг.7. На этапе S321 блок-схемы последовательности операций способа на фиг.7 "запрос предельного крутящего момента от управления проскальзыванием ремня" задается как запрошенный водителем крутящий момент.
На этапе S33 во время управления проскальзыванием ремня, при котором определение разрешения BSC и определение продолжения BSC продолжаются, вторичное гидравлическое давление колеблется и корректируется посредством управления с обратной связью с использованием информации разности фаз на фиг.8. Далее описываются этапы блок-схемы последовательности операций способа на фиг.8.
На этапе S331 управляющее вторичное гидравлическое давление колеблется. Т.е. гидравлическое давление синусоидального колебания с предварительно определенной амплитудой и предварительно определенной частотой накладывается на управляющее вторичное гидравлическое давление. Последовательность операций переходит к этапу S332.
На этапе S332 после колебания управляющего вторичного гидравлического давления на этапе S331, фактическое вторичное гидравлическое давление определяется с помощью датчика 82 вторичного гидравлического давления, чтобы определять фактическое передаточное отношение посредством вычисления на основе информации о частотах вращения из датчика 80 первичной частоты вращения и датчика 81 вторичной частоты вращения. Последовательность операций переходит к этапу S333.
На этапе S333 после определения фактического вторичного гидравлического давления и фактического передаточного отношения на этапе S332, фактическое вторичное гидравлическое давление и передаточное отношение подвергаются процессу полосовой фильтрации, чтобы извлекать их соответствующие колебательные компоненты (синусоидальное колебание) и умножать их. Затем, умноженное значение подвергается процессу фильтрации нижних частот и преобразуется в значение, выражаемое посредством амплитуды и разности θ фаз (косинусоиды) между колебанием фактического вторичного гидравлического давления и колебанием фактического передаточного отношения. Последовательность операций переходит к этапу S334. В данном документе, если A является амплитудой фактического вторичного гидравлического давления, а B является амплитудой фактического передаточного отношения, колебание фактического вторичного гидравлического давления выражается посредством формулы (1): Asinωt. Колебание фактического передаточного отношения выражается посредством формулы (2): Bsin(ωt+θ). Формулы (1) и (2) умножаются, и с использованием следующей формулы (3) "сумма с произведением":
sinαsinβ=-1/2{cos(α+β)-cos(α-β)}
следующая формула (4):
Asinωt*Bsin(ωt+θ)=(1/2)ABcosθ-(1/2)ABcos(2ωt+θ)
получается.
В формуле (4), (1/2)ABcos(2ωt+θ) в качестве двойного компонента частоты колебаний уменьшается через фильтр нижних частот, так что формула (4) становится следующей формулой (5):
Asinωt*Bsin(ωt+θ)≈(1/2)Abcosθ
Т.е. умноженное значение колебательных компонентов, включенных в фактическое вторичное гидравлическое давление и фактическое передаточное отношение, подвергается фильтрации нижних частот и преобразуется в значение амплитуд A, B (константа), умноженных на cosθ (косинус разности θ фаз). Преобразованное значение может использоваться для управляющей информации, обозначающей разность θ фаз в колебании между фактическим вторичным гидравлическим давлением и фактическим передаточным отношением (в дальнейшем в этом документе, просто разность θ фаз).
На этапе S334 после вычисления разности θ фаз в колебании между фактическим вторичным гидравлическим давлением и фактическим передаточным отношением, выполняется определение того, является или нет разность θ фаз такой, что "0≤разность θ фаз<предварительно определенное значение в 1" (диапазон микропроскальзывания). Если результатом является "Да" ("0≤разность θ фаз<предварительно определенное значение в 1"), последовательность операций переходит к этапу S335, тогда как если результатом является "Нет" ("предварительно определенное значение в 1≤разность θ фаз"), последовательность операций переходит к этапу S336.
На этапе S335 после определения того, что "0≤разность θ фаз<предварительно определенное значение в 1" (диапазон микропроскальзывания) на этапе S334, величина коррекции вторичного гидравлического давления задается равной -Δpsec. Последовательность операций переходит к этапу S339.
На этапе S336 после определения того, что "предварительно определенное значение в 1≤разность θ фаз" на этапе S334, выполняется определение в отношении того, является или нет разность θ фаз такой, что "предварительно определенное значение в 1≤разность θ фаз<предварительно определенное значение в 2" (диапазон разности фаз, в котором скорость проскальзывания ремня попадает в целевой диапазон "микропроскальзывания"). Если результатом является "Да" ("предварительно определенное значение в 1≤разность θ фаз<предварительно определенное значение в 2"), последовательность операций переходит к этапу S337, тогда как если результатом является "Нет" ("предварительно определенное значение в 2≤разность θ фаз"), последовательность операций переходит к этапу S338.
На этапе S337 после определения того, что "предварительно определенное значение в 1≤разность θ фаз<предварительно определенное значение в 2" (целевой диапазон проскальзывания) на этапе S336, величина коррекции вторичного гидравлического давления задается равной нулю, и последовательность операций переходит к этапу S339.
На этапе S338 после определения того, что "предварительно определенное значение в 2≤разность θ фаз" (диапазон перехода между микро- и макропроскальзыванием) на этапе S336, величина коррекции вторичного гидравлического давления задается равной +ΔPsec, и последовательность операций переходит к этапу S339.
На этапе S339 после задания величин коррекции вторичного гидравлического давления на этапах S335, S337, S338, управляющее вторичное гидравлическое давление задается равным "значение базового вторичного гидравлического давления+величина коррекции вторичного гидравлического давления". Затем, последовательность операций завершается.
Фиг.9 является блок-схемой последовательности операций способа для процесса возврата от управления проскальзыванием ремня к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.10 является блок-схемой последовательности операций способа для процесса ограничения крутящего момента из процесса возврата к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.11 является блок-схемой последовательности операций способа для процесса ограничения скорости работы трансмиссии в процессе возврата к обычному управлению, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления.
Во-первых, как очевидно из фиг.9, в то время как обычное управление возвращается из управления проскальзыванием ремня из завершения продолжения BSC к началу обычного управления, процесс возврата к управлению с обратной связью (этап S51), в котором управляющее вторичное гидравлическое давление получается с использованием фактического вторичного гидравлического давления, процесс ограничения крутящего момента (этап S52) в качестве подготовки к возврату к обычному управлению, процесс сброса колебания и коррекции вторичного гидравлического давления (этап S53) для управления проскальзыванием ремня, и процесс ограничения работы трансмиссии (этап S54), в котором скорость работы трансмиссии ограничивается, выполняются одновременно.
На этапе S51, в то время как обычное управление возвращается из управления проскальзыванием ремня из завершения продолжения BSC к началу обычного управления, управление с обратной связью, в котором управляющее вторичное гидравлическое давление получается с использованием фактического вторичного гидравлического давления, определенного посредством датчика 82 вторичного гидравлического давления, возвращается.
На этапе S52, в то время как обычное управление возвращается из управления проскальзыванием ремня из завершения продолжения BSC к началу обычного управления, выполняется процесс ограничения крутящего момента в качестве подготовки к возврату к обычному управлению на фиг.10.
На этапе S53, в то время как обычное управление возвращается из управления проскальзыванием ремня из завершения продолжения BSC к началу обычного управления, колебание и коррекция вторичного гидравлического давления на фиг.8 сбрасываются, чтобы ожидать обычного управления.
На этапе S54, в то время как обычное управление возвращается из управления проскальзыванием ремня от завершения продолжения BSC к началу обычного управления, выполняется процесс ограничения работы трансмиссии, в котором скорость работы трансмиссии ограничивается на фиг.11.
Далее описываются этапы блок-схемы последовательности операций способа, показывающей процесс ограничения крутящего момента на фиг.10. Ключевой пункт этого процесса ограничения крутящего момента состоит в том, чтобы переключать средства управления на основе количественного отношения между тремя значениями из запрошенного водителем крутящего момента, запроса предельного крутящего момента из BSC и перегрузочной способности по крутящему моменту (вычисленной перегрузочной способности по крутящему моменту). В данном документе, запрошенный водителем крутящий момент означает крутящий момент двигателя, запрашиваемый водителем, запрос предельного крутящего момента из BSC означает величину предельного крутящего момента, показанную в фазах (2), (3) на фиг.20. Перегрузочная способность по крутящему моменту, в общем, является допустимой расчетной перегрузочной способностью по крутящему моменту и задается равной значению, превышающему запрошенный водителем крутящий момент, посредством допустимого запаса с учетом механического варьирования механизма 4 ременной бесступенчато регулируемой трансмиссии, в целях предотвращения проскальзывания ремня. В данном документе, фактическая перегрузочная способность по крутящему моменту управляется при управлении вторичным гидравлическим давлением. Дополнительно, вычисленная перегрузочная способность по крутящему моменту означает перегрузочную способность по крутящему моменту во время процесса возврата (фаза (3) на фиг.20) BSC (фаза (2) на фиг.20). Вычисленная перегрузочная способность по крутящему моменту является, в частности, значением на основе или вычисленным из фактического вторичного гидравлического давления и фактического передаточного отношения (перегрузочная способность по крутящему моменту одного из двух шкивов 42, 43, в который крутящий момент двигателя вводится, т.е. первичного шкива 42).
На этапе S521 выполняется определение в отношении того, превышает или нет запрошенный водителем крутящий момент запрос предельного крутящего момента из BSC. Если результатом является "Да", последовательность операций переходит к этапу S522, тогда как если результатом является "Нет", последовательность операций переходит к этапу S525.
На этапе S522 после определения того, что запрошенный водителем крутящий момент превышает запрос предельного крутящего момента из BSC на этапе S521, выполняется определение в отношении того, превышает или нет вычисленная перегрузочная способность по крутящему моменту запрос предельного крутящего момента из BSC. Если результатом является "Да", последовательность операций переходит к этапу S523, тогда как если результатом является "Нет", последовательность операций переходит к этапу S524.
На этапе S523 после определения того, что "вычисленная перегрузочная способность по крутящему моменту>запрос предельного крутящего момента из BSC" на этапе S522, запрос предельного крутящего момента из BSC задается равным меньшему из запроса предельного крутящего момента из BSC (предыдущего значения)+ΔT и вычисленной допустимой перегрузочной способности по крутящему моменту. Последовательность операций переходит к возврату.
На этапе S524 после определения того, что "вычисленная перегрузочная способность по крутящему моменту≤запрос предельного крутящего момента из BSC" на этапе S522, запрос предельного крутящего момента из BSC задается равным меньшему из запроса предельного крутящего момента из BSC (предыдущего значения) и запрошенного водителем крутящего момента. Последовательность операций переходит к возврату.
На этапе S525 после определения того, что "запрошенный водителем крутящий момент≤запрос предельного крутящего момента из BSC" на этапе S521, выполняется определение в отношении того, превышает или нет вычисленная перегрузочная способность по крутящему моменту запрос предельного крутящего момента из BSC. Если результатом является "Да", последовательность операций переходит к этапу S527, тогда как если результатом является "Нет", последовательность операций переходит к этапу S526.
На этапе S526 после определения того, что "вычисленная перегрузочная способность по крутящему моменту≤запрос предельного крутящего момента из BSC" на этапе S525, запрос предельного крутящего момента из BSC задается равным меньшему из запроса предельного крутящего момента из BSC (предыдущего значения) и запрошенного водителем крутящего момента. Последовательность операций переходит к возврату.
На этапе S527 после определения того, что "вычисленная перегрузочная способность по крутящему моменту>запрос предельного крутящего момента из BSC" на этапе S525, запрос предельного крутящего момента из BSC подавляется. Последовательность операций завершается.
Далее описываются этапы блок-схемы последовательности операций способа, показывающей процесс ограничения для скорости работы трансмиссии передаточного отношения, чтобы ограничивать целевую первичную частоту вращения на фиг.11.
На этапе S541 целевой инерционный крутящий момент вычисляется. Последовательность операций переходит к этапу S542.
На этапе S542 после вычисления целевого инерционного крутящего момента на этапе S541, целевая скорость изменения первичной частоты вращения вычисляется из целевого инерционного крутящего момента. Затем, последовательность операций переходит к этапу S543.
На этапе S543 после вычисления целевой скорости изменения первичной частоты вращения на этапе S542, ограниченная целевая первичная частота вращения, не превышающая целевую скорость изменения первичной частоты вращения, вычисляется, и последовательность операций переходит к этапу S544.
На этапе S544 после вычисления ограниченной целевой скорости изменения первичной частоты вращения на этапе S543, управление трансмиссией выполняется на основе ограниченной целевой первичной частоты вращения, и последовательность операций переходит к этапу S545.
На этапе S545 после управления трансмиссией на этапе S544, выполняется определение в отношении того, завершается или нет управление трансмиссией на основе ограниченной целевой первичной частоты вращения, или достигает или нет фактическая первичная частота вращения ограниченной целевой первичной частоты вращения. Если результатом является "Да" (завершение управления трансмиссией), последовательность операций завершается, тогда как если результатом является "Нет" (в середине управления трансмиссией), и последовательность операций возвращается к этапу S541.
Фиг.12 является блок-схемой последовательности операций способа для всего процесса определения разрешения BSC, выполняемого посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.13 показывает пороговую характеристику в качестве порогового значения 1 для открытия дросселя, используемого, когда переключатель экономичного режима включается в процессе определения разрешения BSC, выполняемом посредством модуля 8 CVT-управления согласно первому варианту осуществления. Фиг.14 показывает пороговую характеристику в качестве порогового значения 2 для открытия дросселя, используемого, когда переключатель экономичного режима выключается в процессе определения разрешения BSC, выполняемом посредством модуля 8 CVT-управления согласно первому варианту осуществления. Далее процесс определения разрешения BSC описывается со ссылкой на фиг.12-14.
На этапе S21 выполняется определение в отношении того, включен или нет переключатель 89 экономичного режима, чтобы давать возможность водителю выбирать обычный режим вождения или экономичный режим вождения. Если результатом является "Да" (выбран экономичный режим вождения), последовательность операций переходит к этапу S22, а если результатом является "Нет" (выбран обычный режим вождения), последовательность операций переходит к этапу S26 (средство установки ограничения). Включенное состояние переключателя 89 экономичного режима является одним из предварительно определенных условий разрешения предельного ускорения и указывает выбор водителем экономичного режима вождения, направленного на повышение экономии топлива.
На этапе S22 после того, как экономичный режим вождения выбирается на этапе S21, выполняется определение в отношении того, равняется или нет скорость открытия дросселя пороговому значению 1 или меньше. Если результатом является "Да" ("скорость открытия дросселя≤пороговое значение 1"), последовательность операций переходит к этапу S23, тогда как если результатом является "Нет" (скорость открытия дросселя>пороговое значение 1), последовательность операций переходит к этапу S25 (средство установки ограничения). Это "скорость открытия дросселя≤пороговое значение 1" является одним из предварительно определенных условий разрешения предельного ускорения и указывает, что водитель управляет акселератором безотносительно запроса на существенное ускорение во время экономичного режима вождения. Скорость открытия дросселя находится посредством дифференциальной операции определенного открытия дросселя из датчика 87 открытия дросселя во времени. Пороговое значение 1 имеет характеристики, как показано на фиг.13, остается высоким, когда открытие дросселя является низким, и чем выше открытие дросселя, тем ниже пороговое значение 1, и остается низким, когда скорость транспортного средства является высокой, и чем ниже скорость транспортного средства, тем ниже пороговое значение 1. Во время экономичного режима вождения, чтобы приоритезировать экономию топлива относительно запроса на ускорение водителя, диапазон "скорость открытия дросселя≤пороговое значение 1" задается так, что он превышает диапазон пороговой характеристики на фиг.14 "скорость открытия дросселя≤пороговое значение 2". На фиг.13, чем выше открытие дросселя, тем ниже пороговое значение 1, поскольку водитель запрашивает сильное ускорение при нажатии акселератора при значительном открытии дросселя. Кроме того, чем ниже скорость транспортного средства, тем ниже открытие дросселя 1, поскольку водитель запрашивает сильное ускорение при нажатии акселератора на низкой скорости транспортного средства.
На этапе S23 после того, как "скорость открытия дросселя≤пороговое значение 1" определяется на этапе S22, целевое передаточное отношение ограничивается предварительно определенным значением, и последовательность операций переходит к этапу S24 (средство ограничения скорости работы трансмиссии).
В данном документе, ограничение целевого передаточного отношения до предварительно определенного значения означает ограничение скорости изменения управляющего передаточного отношения так, что "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение" в качестве условия разрешения BSC-операции (условия разрешения и продолжения BSC) удовлетворяется. Т.е. предварительно определенное значение на этапе S23 является идентичным пороговому значению для "|скорость изменения управляющего передаточного отношения|" в условиях разрешения и продолжения BSC на этапах S2, S4.
На этапе S24 согласно ограничению или отсутствию ограничения на скорость изменения целевого передаточного отношения на этапе S23, S25 и S27, разрешение BSC или продолжение BSC определяется согласно условию разрешения BSC-операции. Затем, последовательность операций завершается.
На этапе S25 после того, как "скорость открытия дросселя>пороговое значение 1" определяется, скорость изменения целевого передаточного отношения не ограничивается. Последовательность операций переходит к этапу S24.
На этапе S26 после того, как выбор обычного режима вождения определяется на этапе S21, выполняется определение в отношении того, равняется или нет скорость открытия дросселя пороговому значению 2 или меньше. Если результатом является "Да" ("скорость открытия дросселя≤пороговое значение 2"), последовательность операций переходит к этапу S23. Если результатом является "Нет" ("скорость открытия дросселя>пороговое значение 2"), последовательность операций переходит к этапу S27 (средство установки ограничения). Это "скорость открытия дросселя≤пороговое значение 2" является одним из предварительно определенных условий разрешения предельного ускорения и указывает, что водитель управляет акселератором безотносительно запроса на существенное ускорение во время обычного режима вождения. Скорость открытия дросселя находится посредством дифференциальной операции определенного открытия дросселя из датчика 87 открытия дросселя во времени. Аналогично пороговому значению 1, пороговое значение 2 имеет характеристики, как показано на фиг.14, остается высоким, когда открытие дросселя является низким, и чем выше открытие дросселя, тем ниже пороговое значение 2, и остается высоким, когда скорость транспортного средства является высокой, и чем ниже скорость транспортного средства, тем ниже пороговое значение 2. Во время обычного режима вождения, чтобы приоритезировать запрос на ускорение водителя относительно экономии топлива, диапазон "скорость открытия дросселя≤пороговое значение 2" задается так, что он меньше диапазона пороговой характеристики на фиг.13 "скорость открытия дросселя≤пороговое значение 1".
На этапе S27 после того, как "скорость открытия дросселя>пороговое значение 2" определяется на этапе S26, скорость изменения целевого передаточного отношения не ограничивается. Последовательность операций переходит к этапу S24.
Далее описывается управление и работа механизма 4 ременной бесступенчато регулируемой трансмиссии согласно первому варианту осуществления. Она разделяется на шесть частей, обычное управление и управление проскальзыванием ремня, операции определения разрешения и продолжения BSC, операции определения разрешения и продолжения BSC посредством "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение", операция расширения рабочего диапазона, в которой управление проскальзыванием ремня разрешается, управление проскальзыванием ремня (BSC-операция) и операция управления возвратом от BSC к обычному управлению.
Обычное управление и управление проскальзыванием ремня
Ременная бесступенчато регулируемая трансмиссия 4 согласно первому варианту осуществления выполнена с возможностью управлять первичным и вторичным гидравлическими давлениями. Обычное управление означает управление ремнем 44, намотанным вокруг шкивов 42, 43, так что он не проскальзывает, в то время как управление проскальзыванием ремня означает управление ремнем 44 так, что он преднамеренно проскальзывает на предварительно определенной скорости проскальзывания. Далее описываются существенные условия, обычное управление и управление проскальзыванием ремня и причина применения управления разностью фаз с обратной связью.
При обычном управлении первичное и вторичное гидравлическое давление управляется так, что оно формируют силу зажима ремня (=осевое усилие ремня), достаточную для того, чтобы безусловно предотвращать проскальзывание ремня 44 даже при флуктуации входного крутящего момента от двигателя 1 в качестве источника приведения в движение. Во время обычного управления фактическое вторичное гидравлическое давление из датчика 82 вторичного гидравлического давления управляется посредством управления гидравлическим давлением с обратной связью (PI-управления) так, что оно является целевым гидравлическим давлением, вычисленным в модуле 90 вычисления базового гидравлического давления на основе входного крутящего момента или требуемой разности осевых усилий в трансмиссии (фиг.4).
Между тем, при управлении проскальзыванием ремня вторичное гидравлическое давление управляется так, чтобы поддерживать так называемое микропроскальзывание ремня 44, посредством понижения силы зажима ремня по сравнению с силой зажима ремня при обычном управлении при идентичном состоянии движения. При управлении проскальзыванием ремня вторичное гидравлическое давление колеблется, чтобы извлекать колебательный компонент, включенный в фактическое вторичное гидравлическое давление, и колебательный компонент, включенный в фактическое передаточное отношение вследствие колебания, и регулировать разность θ фаз в извлеченных колебательных компонентах так, что она попадает в целевой диапазон ("предварительно определенное значение 1≤разность фаз<предварительно определенное значение 2") посредством управления разностью фаз с обратной связью (фиг.8).
Причина использования управления разностью фаз с обратной связью при управлении проскальзыванием ремня состоит в том, что тогда как проскальзывание ремня не возникает без изменения в положениях контакта вторичного шкива 43 и ремня 44, извлеченные колебательные компоненты в фактическом вторичном гидравлическом давлении и фактическом передаточном отношении имеют синхронные формы сигнала в идентичной фазе. Тем не менее, когда проскальзывание ремня возникает вследствие изменения в положениях контакта вторичного шкива 43 и ремня 44, разность фаз в формах сигналов колебания становится большей пропорционально увеличению скорости проскальзывания ремня. Другими словами, разность фаз и скорость проскальзывания ремня близко коррелируются друг с другом так, что с использованием информации разности фаз для того, чтобы оценивать скорость проскальзывания ремня, управление проскальзыванием ремня осуществимо с высокой точностью, чтобы плавно перемещать ремень 44 в диапазоне микропроскальзывания без непосредственного определения скорости проскальзывания ремня.
Помимо этого, информация разности фаз обнаруживается из информации фактического передаточного отношения из датчиков 80, 81 первичной и вторичной частоты вращения и информации фактического вторичного гидравлического давления из датчика 82 вторичного гидравлического давления. Это исключает необходимость добавления нового датчика для обнаружения информации скорости проскальзывания при управлении проскальзыванием ремня. Управление проскальзыванием ремня выполняется с использованием существующих датчиков 80, 81, 82 для обычного управления ременной бесступенчато регулируемой трансмиссией 4.
Тем не менее, если базовый компонент фактического вторичного гидравлического давления находится с использованием отклонения, вычисленного из информации фактического вторичного гидравлического давления, содержащей колебательный компонент, из датчика 82 вторичного гидравлического давления, вторичное гидравлическое давление не может стабильно управляться вследствие флуктуации в вычисленном отклонении, вызываемой посредством колебаний. Вследствие этого, при управлении проскальзыванием ремня базовый компонент фактического вторичного гидравлического давления находится посредством нулевого отклонения.
Операции определения разрешения и продолжения BSC
В начале движения транспортного средства, последовательность операций переходит к этапу S2 от этапа S1 на блок-схеме последовательности операций способа на фиг.5. Если все условия определения разрешения BSC не удовлетворяются на этапе S2, последовательность операций от этапа S1 до этапа S2 повторяется, чтобы продолжать обычное управление. Т.е. удовлетворение всех условий определения разрешения BSC на этапе S2 задается как условие начала BSC-управления.
Условия разрешения BSC в первом варианте осуществления заключаются в следующем:
(1) Скорость изменения перегрузочной способности по передаваемому крутящему моменту механизма 4 ременной бесступенчато регулируемой трансмиссии является стабильной и небольшой.
(2) Оцененная точность входного крутящего момента в первичный шкив 42 находится в пределах надежного диапазона.
(3) Вышеуказанные разрешенные условия (1), (2) продолжаются в течение предварительно определенного времени. На этапе S2 определяется то, удовлетворяются или нет все вышеуказанные условия (1), (2), (3).
Таким образом, управлению проскальзыванием ремня разрешается начинаться, если скорость изменения перегрузочной способности по передаваемому крутящему моменту механизма 4 ременной бесступенчато регулируемой трансмиссии продолжает быть стабильно небольшой, и оцененная точность входного крутящего момента в первичный шкив 42 непрерывно находится в пределах надежного диапазона в течение предварительно определенного времени во время обычного управления. Как описано выше, управлению проскальзыванием ремня разрешается начинаться при удовлетворении всех условий разрешения BSC так, что есть возможность начинать управление проскальзыванием ремня в предпочтительном состоянии движения транспортного средства с гарантированной высокой точностью управления.
После того, как разрешение BSC определяется на этапе S2, на этапе S3 управление проскальзыванием ремня выполняется для того, чтобы уменьшать входной момент для ремня 44 механизма 4 ременной бесступенчато регулируемой трансмиссии и поддерживать ремень 44 в целевом состоянии микропроскальзывания. Затем, на этапе S4 после управления проскальзыванием ремня на этапе S3, выполняется определение в отношении того, удовлетворяются или нет все условия продолжения BSC. При условии, что все условия продолжения BSC удовлетворяются, последовательность операций от этапа S3 до этапа S4 повторяется, чтобы продолжать управление проскальзыванием ремня (BSC).
Здесь, условия продолжения BSC являются условиями разрешения BSC (1), (2) и исключают условие продолжения в течение предварительно определенного времени (3) из условий разрешения BSC. Это обусловлено тем, что управление проскальзыванием ремня сразу прекращено и возвращено к обычному управлению, если одно из условий (1), (2) не удовлетворено во время управления проскальзыванием ремня. Соответственно, появляется возможность не допускать продолжения управления проскальзыванием ремня в состоянии движения транспортного средства с неопределенной точностью управления.
Операции определения разрешения и продолжения BSC посредством "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение"
При определении разрешения управления проскальзыванием ремня согласно первому варианту осуществления управление проскальзыванием ремня разрешается при одном из условий (1), что скорость изменения управляющего передаточного отношения, указывающая скорость изменения передаточного отношения ременной бесступенчато регулируемой трансмиссии 4, меньше предварительно определенного значения.
В частности, на небольшой скорости изменения работы трансмиссии (диапазон изменения передаточного отношения в единицу времени=скорость работы трансмиссии), колебательный компонент возникает вследствие колебания в ходе работы трансмиссии, как показано в характеристике фактического передаточного отношения относительно характеристики целевого передаточного отношения на фиг.15, но он может быть отделен от колебательного компонента вследствие изменения в передаточном отношении. Таким образом, состояние проскальзывания ремня может быть оценено с высокой точностью посредством мониторинга разности фаз в колебательных компонентах фактического передаточного отношения.
Между тем, на большой скорости изменения работы трансмиссии, колебательный компонент, включенный в фактическое передаточное отношение, исчезает, как показано в области C на фиг.16, таким образом, он не может быть отделен от колебательного компонента вследствие изменения передаточного отношения. Таким образом, состояние проскальзывания ремня не может быть точно оценено посредством мониторинга разности фаз в колебательных компонентах фактического передаточного отношения.
Согласно первому варианту осуществления, тем не менее, разрешается управление проскальзыванием ремня, когда "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение", и состояние проскальзывания ремня оценивается с высокой точностью. Вследствие этого, уменьшение вторичного гидравлического давления уменьшает трение ремня, тем самым понижая нагрузку при вождении на трансмиссию. Соответственно, применяемая экономия топлива двигателя 1 может быть повышена.
Между тем, управление проскальзыванием ремня не разрешается, когда "|скорость изменения управляющего передаточного отношения|≥предварительно определенное значение", и состояние проскальзывания ремня не оценивается точно. Следовательно, можно не допускать перехода ремня в состояние макропроскальзывания или значительного проскальзывания ремня во время управления проскальзыванием ремня, которое в противном случае возникает, когда управление проскальзыванием ремня разрешается, например, без учета условия скорости работы трансмиссии. Т.е. состояние микропроскальзывания ремня поддерживается посредством уменьшения вторичного гидравлического давления и силы зажима ремня во время управления проскальзыванием ремня по сравнению с вторичным гидравлическим давлением и силой зажима ремня во время обычного управления. Увеличение входного крутящего момента в ременную бесступенчато регулируемую трансмиссию 4 в этом состоянии может приводить к тому, что ремень 44, поддерживаемый при низкой силе зажима, сильно скользит (макропроскальзывание).
Относительно условия разрешения BSC "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение", предварительно определенное значение в качестве порогового значения для определения абсолютной величины скорости изменения управляющего передаточного отношения задается равным значению, которое дает возможность извлечения колебательного компонента, включенного в фактическое передаточное отношение Ratio. Например, предварительно определенное значение задается равным значению, полученному посредством вычитания допустимого запаса варьирования в качестве продукта из скорости изменения верхнего предельного передаточного отношения, которая определяется как ограничение для того, чтобы иметь возможность извлекать колебательный компонент в фактическом передаточном отношении Ratio при постепенном увеличении скорости работы трансмиссии ременной бесступенчато регулируемой трансмиссии 4.
Система управления проскальзыванием ремня выполнена так, что контроллер 93 синусоидальных колебаний на фиг.4 накладывает синусоидальное колебание гидравлического давления на управляющее вторичное гидравлическое давление для колебания, чтобы оценивать состояние проскальзывания ремня с использованием колебательных компонентов вследствие колебания, включенных в фактическое вторичное гидравлическое давление и в передаточное отношение Ratio. Другими словами, извлечение колебательного компонента вследствие колебания из фактического передаточного отношения Ratio является существенным условием для выполнения управления проскальзыванием ремня при поддержании оцененной точности состояния проскальзывания ремня.
Таким образом, при условии определения разрешения управления проскальзыванием ремня "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение", можно поддерживать оцененную точность состояния проскальзывания ремня на основе двух извлеченных колебательных компонентов. Помимо этого, появляется возможность расширять рабочий диапазон, при котором условие разрешения управления проскальзыванием ремня на скорости изменения передаточного отношения удовлетворяется, посредством предоставления возможности нахождения увеличения скорости изменения передаточного отношения в предельном диапазоне, чтобы иметь возможность извлекать колебательный компонент в фактическом передаточном отношении Ratio, по сравнению с управлением проскальзыванием ремня, разрешенным только при условии, что скорость изменения передаточного отношения является константой.
Первый вариант осуществления выполнен так, что управление проскальзыванием ремня разрешается не на основе скорости изменения фактического передаточного отношения ременной бесступенчато регулируемой трансмиссии 4, а когда скорость изменения управляющего передаточного отношения в качестве команды управления меньше предварительно определенного значения. Следовательно, начало и продолжение управления проскальзыванием ремня определяется в момент, когда целевое передаточное отношение находится посредством операции, чтобы вычислять скорость изменения управляющего передаточного отношения из текущего передаточного отношения и целевого передаточного отношения. Соответственно, начало и продолжение управления проскальзыванием ремня может быть определено на основе прогностической информации в качестве скорости изменения управляющего передаточного отношения до того, как передаточное отношение ременной бесступенчато регулируемой трансмиссии 4 фактически изменяется.
Операция расширения рабочего диапазона, чтобы разрешать управление проскальзыванием ремня
Во время движения транспортного средства, когда переключатель 89 экономичного режима включен, и скорость открытия дросселя имеет пороговое значение 1 или меньше, последовательность операций на фиг.12 переходит к этапу S21, S22, S23-S24. Т.е. условие выбора экономичного режима вождения как включения переключателя 89 экономичного режима и условие скорости открытия дросселя как "скорость открытия дросселя≤пороговое значение 1" удовлетворяется ("Да" на этапах S21, S22), и ограничение на ускорение транспортного средства разрешается при условии разрешения предельного ускорения. После этого разрешения, на этапе S23 скорость изменения целевого передаточного отношения ограничивается предварительно определенным значением так, что оно удовлетворяет "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение", и на этапе S24 разрешение и продолжение BSC, чтобы начинать и продолжать управление проскальзыванием ремня, определяется в соответствии с условием разрешения BSC-операции.
Во время движения транспортного средства, когда переключатель 89 экономичного режима включен, и скорость открытия дросселя превышает пороговое значение 1, последовательность операций на фиг.12 переходит к этапу S21, S22, S25-S24. Т.е. условие выбора экономичного режима вождения как включения переключателя 89 экономичного режима удовлетворяется ("Да" на этапе S21), а условие скорости открытия дросселя как "скорость открытия дросселя>пороговое значение 1" не удовлетворяется ("Нет" на этапе S22), так что ускорение транспортного средства на основе запроса на ускорение разрешается. После этого разрешения, на этапе S25 скорость изменения целевого передаточного отношения не ограничивается, и на этапе S24, по существу, поддержание обычного управления и возврат к обычному управлению определяется в соответствии с условием разрешения BSC-операции.
Во время движения транспортного средства, когда переключатель 89 экономичного режима выключен, и скорость открытия дросселя равна или ниже порогового значения 2, последовательность операций на фиг.12 переходит к этапу S21, S26, S23-S24. Т.е. даже в обычном режиме вождения с выключенным переключателем 89 экономичного режима, при удовлетворении условия "скорость открытия дросселя≤пороговое значение 2" ("Да" на этапе S26), ограничение на ускорение транспортного средства разрешается. На этапе S23, после этого разрешения, скорость изменения целевого передаточного отношения ограничивается предварительно определенным значением так, что оно удовлетворяет "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение". На этапе S24 разрешение и продолжение BSC, чтобы начинать и продолжать управление проскальзыванием ремня, определяется в соответствии с условием разрешения BSC-операции.
Во время движения транспортного средства, когда переключатель 89 экономичного режима выключен, и скорость открытия дросселя превышает пороговое значение 2, последовательность операций на фиг.12 переходит к этапу S21, S26, S27-S24. Т.е. условие выбора обычного режима вождения удовлетворяется посредством выключения переключателя 89 экономичного режима ("Да" на этапе S21), а условие скорости открытия дросселя как "скорость открытия дросселя>пороговое значение 2" ("Нет" на этапе S26) не удовлетворяется, так что ускорение транспортного средства на основе запроса на ускорение разрешается. После разрешения, скорость изменения целевого передаточного отношения не ограничивается на этапе S27, и на этапе S24, по существу, поддержание обычного управления и возврат к обычному управлению определяется в соответствии с условием разрешения BSC-операции.
Как описано выше, при определении разрешения управления проскальзыванием ремня согласно первому варианту осуществления, одно из условий для разрешения управления проскальзыванием ремня состоит в том, что скорость изменения управляющего передаточного отношения, указывающая скорость работы трансмиссии ременной бесступенчато регулируемой трансмиссии 4, меньше предварительно определенного значения. Кроме того, управление проскальзыванием ремня активно выполняется посредством принудительного ограничения скорости изменения целевого передаточного отношения, когда ограничение на ускорение транспортного средства определяется как разрешающее согласно условию разрешения предельного ускорения.
Фиг.17 является временной диаграммой для характеристик определения ограничения, целевого передаточного отношения, флага BSC-операции (сравнение), ограниченного целевого передаточного отношения и флага ограниченной BSC-операции. Фиг.18 является графиком, показывающим преимущества расширенного рабочего диапазона BSC согласно первому варианту осуществления по сравнению со случаем, в котором целевая скорость изменения работы трансмиссии (целевая скорость работы трансмиссии) активно не ограничивается. Далее операция расширения рабочего диапазона, чтобы разрешать управление проскальзыванием ремня, описывается с фиг.17, 18.
Во-первых, управление проскальзыванием ремня направлено на повышение эффективности передачи энергии ременной бесступенчато регулируемой трансмиссии 4 посредством уменьшения трения ремня и потерь на трение и повышение экономии топлива транспортного средства с двигателем или гибридного транспортного средства. Чтобы повышать экономию топлива, для реализации эффективного управления проскальзыванием ремня важно расширять рабочий диапазон, в котором управление проскальзыванием ремня выполняется, в максимально возможной степени.
Для сравнения показывается пример, в котором единственное условие разрешения управления проскальзыванием ремня состоит в том, что скорость изменения управляющего передаточного отношения задается согласно состоянию транспортного средства (открытие акселератора, скорость транспортного средства и т.п.) так, что она равна или меньше предварительно определенного значения или меньше. Хотя целевое передаточное отношение колеблется посредством незначительного изменения водителем открытия акселератора и т.п., как показано в характеристике T на фиг.17, флаг BSC-операции активируется в небольших разделенных рабочих диапазонах во время t2-t3, t4-t5, t6-t7, t8-t9, t10-t11 и после t13, и управление проскальзыванием ремня выполняется в эти периоды. Т.е. в этом примере рабочий диапазон, в котором условие "|скорость изменения управляющего передаточного отношения|≤предварительно определенное значение" удовлетворяется, ограничивается, поскольку то, разрешать или нет управление проскальзыванием ремня, определяется пассивно в зависимости от действия с акселератором водителя или состояния транспортного средства в качестве скорости транспортного средства. В частности, если водитель склонен немного нажимать и отпускать акселератор многократно во время движения на постоянной скорости, то рабочий диапазон, в котором выполняется управление проскальзыванием ремня, очень ограничен.
Между тем, в первом варианте осуществления скорость изменения целевого передаточного отношения принудительно ограничивается при удовлетворении условия разрешения предельного ускорения. Тем самым управление проскальзыванием ремня активно выполняется не в зависимости от действия с акселератором водителя или состояния транспортного средства, а в зависимости от удовлетворения условия "|скорость изменения управляющего передаточного отношения|≤предварительно определенное значение".
В частности, в то время как целевое передаточное отношение колеблется посредством незначительного изменения водителем открытия акселератора или незначительного изменения в скорости транспортного средства на уклоне, как показано в характеристике T на фиг.17, во время t1 скорость изменения целевого передаточного отношения (целевая скорость работы трансмиссии) ограничивается предварительно определенным значением так, что она удовлетворяет "|скорость изменения управляющего передаточного отношения|<предварительно определенное значение" при удовлетворении обоих из условия разрешения предельного ускорения как выбора экономичного режима вождения и условия скорости открытия дросселя как "скорость открытия дросселя≤пороговое значение 1". Затем, флаг BSC-операции задается так, чтобы начинать управление проскальзыванием ремня. До тех пор, пока условие разрешения предельного ускорения и условие скорости открытия дросселя удовлетворяются, скорость изменения целевого передаточного отношения непрерывно ограничивается при заданном флаге BSC-операции. Когда во время t12 скорость открытия дросселя становится больше порогового значения 1, и условие скорости открытия дросселя не удовлетворено, ограничение на скорость изменения целевого передаточного отношения прекращается с помощью деактивации флага BSC-операции, чтобы завершать управление проскальзыванием ремня. Как показано в характеристике T' ограниченного целевого передаточного отношения на фиг.17, скорость изменения целевого передаточного отношения (=скорость работы трансмиссии) непрерывно ограничивается, чтобы поддерживать управление проскальзыванием ремня в периоде G от точки FS во время t1 до точки FE во время t12.
По сравнению с этим примером период, в который управление проскальзыванием ремня выполняется согласно первому варианту осуществления, является суммой периода в примере и периодов t1-t2, t3-t4, t5-t6, t7-t8, t9-t10 и t11-t12, во время которых "|управляющая скорость изменения передаточного отношения|≤предварительно определенное значение" не удовлетворяется.
Т.е. на фиг.18 рабочий диапазон BSC расширяется, как указано посредством стрелки W, посредством добавления рабочего диапазона BE2 BSC, в котором условие разрешения предельного ускорения транспортного средства удовлетворяется, к рабочему диапазону BE1 BSC в сравниваемом примере. Дополнительно, оцененная точность состояния проскальзывания ремня может поддерживаться посредством ограничения скорости изменения целевого передаточного отношения до значения меньше скорости изменения предельного передаточного отношения BSC-операции (=предварительно определенное значение) в добавленном рабочем диапазоне BE2 BSC из скорости изменения целевого передаточного отношения, определенной посредством запроса на ускорение и рабочих характеристик транспортного средства, как указано посредством стрелки L на фиг.18.
Таким образом, в таком состоянии движения, как включение переключателя 89 экономичного режима, в котором ограничение на ускорение транспортного средства разрешается, можно повышать эффективность использования топлива посредством принудительного ограничения скорости изменения передаточного отношения BSC-управляемой скоростью изменения передаточного отношения, чтобы активно выполнять управление проскальзыванием ремня и расширять рабочий диапазон BSC.
Операция управления проскальзыванием ремня (BSC-операция)
В начале управления проскальзыванием ремня вторичное гидравлическое давление задается равным такому значению, чтобы обнаруживать силу зажима, которое не вызывает проскальзывание ремня с оцененной безопасностью, так что такое условие, что разность θ фаз ниже предварительно определенного значения 1, удовлетворяется. На блок-схеме последовательности операций способа на фиг.8, последовательность операций от этапа S331-->этап S332-->этап S333-->этап S334-->этап S335 до этапа S339 повторяется, и каждый раз, когда последовательность операций повторяется, управляющее вторичное гидравлическое давление снижается в ответ на коррекцию посредством -Δpsec. Затем, до тех пор, пока разность θ фаз в 1 или более не достигает предварительно определенного значения в 2, последовательность операций переходит от этапа S331-->этап S332-->этап S333-->этап S334-->этап S336-->этап S337 до этапа S339 на фиг.8, чтобы поддерживать управляющее вторичное гидравлическое давление. Когда разность θ фаз составляет предварительно определенное значение в 2 или более, последовательность операций переходит от этапа S331-->этап S332-->этап S333-->этап S334-->этап S336-->этап S338 до этапа S339, чтобы увеличивать управляющее вторичное гидравлическое давление в ответ на коррекцию посредством +Δpsec. При управлении проскальзыванием ремня скорость проскальзывания поддерживается в диапазоне микропроскальзывания посредством управления разностью фаз с обратной связью так, что разность θ фаз попадает в диапазон от предварительно определенного значения 1 или более до меньше предварительно определенного значения 2.
Управление проскальзыванием ремня описывается в отношении временной диаграммы на фиг.19. Во время t1 вышеуказанные условия разрешения BSC (1), (2) удовлетворяются и продолжаются (условие разрешения BSC (3)). От времени t2 до времени t3, по меньшей мере, одно из вышеуказанных условий продолжения BSC (1), (2) становится не удовлетворенным, и флаг BSC-операции и флаг запрещения F/B по вторичному давлению (флаг запрещения обратной связи по вторичному давлению) задаются для управления проскальзыванием ремня. Непосредственно перед временем t3 акселератор нажимается, так что, по меньшей мере, одно из условий продолжения BSC становится не удовлетворенным, и управление для того, чтобы возвращаться к обычному управлению, выполняется от времени t3 до времени t4. После времени t4 выполняется обычное управление.
Таким образом, как очевидно из характеристики открытия акселератора, характеристики скорости транспортного средства и характеристики крутящего момента двигателя, а также характеристики величины коррекции соленоидного тока соленоида 75 вторичного гидравлического давления во время определения равномерного хода, указанного посредством стрелки E на фиг.19, при управлении проскальзыванием ремня разность θ фаз между колебательными компонентами вторичного гидравлического давления вследствие колебания и передаточного отношения отслеживается, чтобы увеличивать или уменьшать значение тока. Следует отметить, что соленоид 75 вторичного гидравлического давления обычно является открытым (всегда открытым) и снижает вторичное гидравлическое давление вместе с повышением значения тока.
Фактическое передаточное отношение поддерживается практически постоянным посредством управления проскальзыванием ремня, хотя он колеблется с небольшой амплитудой, как показано в характеристике фактического передаточного отношения (Ratio) на фиг.19. Разность θ фаз, как показано в характеристиках разности фаз колебания вторичного давления и колебания Ratio на фиг.19, постепенно увеличивается во времени от времени t2, когда скорость проскальзывания является приблизительно нулевой, и достигает целевого значения (целевой скорости проскальзывания). Вторичное гидравлическое давление, как показано в характеристике вторичного гидравлического давления на фиг.19, снижается во времени от времени t2, когда безопасность обеспечивается, как указано посредством стрелки F, и достигает значения расчетного минимального давления, дополненного амплитудой гидравлического давления на конце, который находится в условии гидравлического давления с допустимым запасом для фактического минимального давления. Хотя управление проскальзыванием ремня продолжается в течение длительного времени, фактическое вторичное гидравлическое давление поддерживается в амплитудном диапазоне расчетного гидравлического давления плюс минимального давления, чтобы поддерживать целевое значение разности θ фаз (скорости проскальзывания).
Таким образом, снижение вторичного гидравлического давления посредством управления проскальзыванием ремня приводит к уменьшению трения ремня, действующего на ремень 44, и уменьшению нагрузки при вождении на механизм 4 ременной бесступенчато регулируемой трансмиссии посредством уменьшения трения ремня. Как результат, можно повышать применяемую экономию топлива двигателя 1 без влияния на рабочие характеристики движения во время управления проскальзыванием ремня на основе определения разрешения BSC.
Управление возвратом от BSC к обычному управлению
Во время управления проскальзыванием ремня, в то время как определения разрешения и продолжения BSC продолжаются, процесс ограничения крутящего момента на этапе S32 на фиг.6 выполняется посредством задания "запроса предельного крутящего момента от управления проскальзыванием ремня" в качестве запрошенного водителем крутящего момента на этапе S321 на фиг.7. Далее операция ограничения крутящего момента для возврата к обычному управлению описывается со ссылкой на фиг.10 и фиг.20.
Модуль 88 управления двигателем имеет величину предельного крутящего момента в качестве верхнего предельного управляющего крутящего момента двигателя и управляет фактическим крутящим моментом двигателя 1, чтобы не превышать величину предельного крутящего момента. Эта величина предельного крутящего момента определяется согласно различным запросам. Например, верхний предельный входной крутящий момент для механизма 4 ременной бесступенчато регулируемой трансмиссии задается равным запросу предельного крутящего момента во время обычного управления (фаза (1) на фиг.20), и модуль 8 CVT-управления отправляет запрос предельного крутящего момента во время обычного управления в модуль 88 управления двигателем. Модуль 88 управления двигателем выбирает минимальный из запросов предельного крутящего момента из различных контроллеров в качестве величины предельного крутящего момента.
В частности, во время t5 фаза (1) обычного управления переключается на управление проскальзыванием ремня, и запрос предельного крутящего момента из BSC отправляется в модуль 88 управления двигателем в фазе (2), как показано в характеристике величины предельного крутящего момента на фиг.20. Тем не менее, запрос предельного крутящего момента из BSC во время BSC (фаза (2) на фиг.20) предназначен для подготовки заранее к ограничению крутящего момента на фиг.10 и фактически не выступает в качестве предельного крутящего момента во время BSC (фаза (2) на фиг.20).
Затем, во время t6 продолжение BSC прерывается и переключается на управление для того, чтобы возвращаться к обычному управлению. Во время t6 запрос предельного крутящего момента выдается вследствие "запрошенный водителем крутящий момент>запрос предельного крутящего момента из BSC" и "вычисленная перегрузочная способность по крутящему моменту≤запрос предельного крутящего момента из BSC". Следовательно, последовательность операций от этапа S521-->этап S522-->этап S524 до возврата на блок-схеме последовательности операций способа на фиг.10 повторяется, чтобы поддерживать запрос предельного крутящего момента из BSC (предыдущее значение) на этапе S524.
После этого, во время t7 "запрошенный водителем крутящий момент>запрос предельного крутящего момента из BSC" и "вычисленная перегрузочная способность по крутящему моменту>запрос предельного крутящего момента из BSC". Последовательность операций от этапа S521-->этап S522-->этап S523 до возврата на фиг.10 повторяется, чтобы постепенно увеличивать запрос предельного крутящего момента из BSC до (предыдущее значение+ΔT). Наряду с этим градиентом повышения, фактический крутящий момент постепенно повышается.
Вследствие повышения запроса предельного крутящего момента из BSC начиная со времени t7, во время t8 "запрошенный водителем крутящий момент≤запрос предельного крутящего момента из BSC" и "вычисленная перегрузочная способность по крутящему моменту>запрос предельного крутящего момента из BSC". Последовательность операций переходит от этапа S521-->этап S525-->этап S527 к завершению на блок-схеме последовательности операций способа на фиг.10. На этапе S527 предельный крутящий момент от BSC подавляется.
В этом примере последовательность операций пропускает этап S526, который выполняется, когда производится действие с акселератором, такое как нажатие или возврат (отпускание) в течение короткого периода времени. В частности, этап S526 пропускается, когда управление проскальзыванием ремня подавляется посредством нажатия акселератора, и акселератор отпускается, как только управление возвратом начинается.
При возврате от управления проскальзыванием ремня к обычному управлению, посредством ограничения скорости изменения входного крутящего момента в ременную бесступенчато регулируемую трансмиссию 4, появляется возможность предотвращать чрезмерное увеличение входного крутящего момента относительно силы зажима ремня и предотвращать большое проскальзывание ремня вследствие внезапного увеличения скорости проскальзывания ремня от микропроскальзывания до макропроскальзывания.
При возврате от управления проскальзыванием ремня к обычному управлению, при изменении передаточного отношения на обычной скорости работы трансмиссии в то время, когда скорость изменения входного крутящего момента для механизма 4 ременной бесступенчато регулируемой трансмиссии подавляется посредством вышеуказанного управления предельным крутящим моментом, входной крутящий момент значительно уменьшается согласно изменению инерции вращения. Это заставляет водителя ощущать необязательное воздействие (замедление). С учетом этого, скорость изменения передаточного отношения ограничивается вместе с ограничением скорости изменения входного крутящего момента.
Т.е. после завершения продолжения BSC и переключения на управление, чтобы возвращаться к обычному управлению, последовательность операций от этапа S541-->этап S542-->этап S543-->этап S544 до этапа S545 на блок-схеме последовательности операций способа на фиг.11 повторяется до завершения управления трансмиссией. Управление трансмиссией осуществляется на основе ограниченной целевой первичной частоты вращения.
Как описано выше, ограничение скорости изменения первичной частоты вращения или понижение скорости работы трансмиссии позволяет уменьшать изменение инерции вращения и предотвратить уменьшение входного крутящего момента для трансмиссии. Как результат, можно не допустить ощущения водителем необязательного воздействия (замедления) при возврате к обычному управлению.
Затем, преимущества устройства и способа управления для механизма 4 ременной бесступенчато регулируемой трансмиссии согласно первому варианту осуществления описаны далее.
(1) Устройство управления для ременной бесступенчато регулируемой трансмиссии транспортного средства, которая включает в себя первичный шкив 42 и вторичный шкив 43, вокруг которых намотан ремень 44, чтобы управлять передаточным отношением посредством управления первичным гидравлическим давлением и вторичным гидравлическим давлением. Оно включает в себя средство управления проскальзыванием ремня (фиг.8), выполненное с возможностью колебания вторичного гидравлического давления и извлечения колебательного компонента вследствие колебания из базового компонента фактического передаточного отношения, когда скорость работы трансмиссии меньше предварительно определенного значения, с тем чтобы управлять вторичным гидравлическим давлением на основе разности фаз между колебательным компонентом фактического передаточного отношения, и колебательным компонентом вторичного гидравлического давления вследствие колебания, при этом скорость работы трансмиссии является скоростью изменения передаточного отношения, средство установки ограничения (этапы S21, S22 и S26 на фиг.12), выполненное с возможностью решения ограничивать ли ускорение транспортного средства, и средство ограничения скорости работы трансмиссии (этап S23 на фиг.12), выполненное с возможностью ограничивать скорость работы трансмиссии до значения меньше предварительно определенного значения, когда средство установки ограничения решает ограничить ускорение транспортного средства. Средство управления проскальзыванием ремня выполнено с возможностью разрешать управление проскальзыванием ремня, в то время как средство ограничения скорости работы трансмиссии ограничивает скорость работы трансмиссии до предварительно определенного значения.
(2) Средство установки ограничения выполнено с возможностью решения ограничить ускорение транспортного средства, когда выбран экономичный режим вождения в качестве предварительно определенного условия разрешения предельного ускорения из обычного режима вождения и экономичного режима вождения (этап S21 на фиг.12).
Таким образом, в дополнение к преимуществам пункта (1), можно расширить рабочий диапазон, в котором управление проскальзыванием ремня разрешается, в ответ на намерение водителя по выбору экономичного режима вождения.
(3) Устройство дополнительно включает в себя переключатель (переключатель 89 экономичного режима), выполненный с возможностью обеспечения водителю возможности выбора обычного режима вождения или экономичного режима вождения. Это позволяет быстро и безусловно отразить, при управлении проскальзыванием ремня, намерение водителя предпочесть экономичный режим вождения посредством простого действия переключения, в дополнение к преимуществам пункта (2).
(4) Средство установки ограничения выполнено с возможностью решения ограничить ускорение транспортного средства, когда скорость увеличения открытия акселератора либо открытия дросселя равна или меньше предварительно определенной скорости (этапы S22 и S26 на фиг.12, фиг.13, 14).
В дополнение к преимуществам пунктов (1) и (3), можно задавать рабочий диапазон с низким уровнем запроса на ускорение в качестве рабочего диапазона, в котором управление проскальзыванием ремня разрешается, в соответствии с запросом на ускорение водителя, представленным посредством скорости увеличения открытия акселератора или открытия дросселя.
В комбинации с выбором режима вождения, например, когда водитель выбирает экономичный режим вождения, рабочий диапазон, в котором разрешается управление проскальзыванием ремня, может задаваться равным расширенному диапазону с высоким уровнем запроса на ускорение, когда предпочтительно учитывается (фиг.13) экономия топлива. Дополнительно, когда выбранный режим водителя является обычным режимом вождения, рабочий диапазон, в котором разрешается управление проскальзыванием ремня, может задаваться равным диапазону с низким уровнем запроса на ускорение во время обычного вождения, когда рабочие характеристики ускорения предпочтительно учитываются (фиг.14).
(5) Способ управления для ременной бесступенчато регулируемой трансмиссии транспортного средства, которая содержит пару шкивов 42, 43, вокруг которых намотан ремень 44, чтобы управлять передаточным отношением посредством управления гидравлическими давлениями шкивов 42, 43, причем способ содержит этапы, на которых, когда скорость работы трансмиссии меньше предварительно определенного значения, осуществляют колебание гидравлического давления и извлекают колебательный компонент вследствие колебания из базового компонента фактического передаточного отношения, чтобы разрешать управление проскальзыванием ремня по гидравлическим давлениям на основе разности фаз между колебательным компонентом фактического передаточного отношения и колебательным компонентом фактического вторичного гидравлического давления вследствие колебания, когда скорость работы трансмиссии ниже предварительно определенного значения, при этом скорость работы трансмиссии является скоростью изменения передаточного отношения; и ограничивают скорость работы трансмиссии до значения меньше предварительно определенного значения при решении ограничить ускорение транспортного средства.
Таким образом, можно создать способ управления для ременной бесступенчато регулируемой трансмиссии транспортного средства, которая позволяет расширять рабочий диапазон, в котором управление проскальзыванием ремня разрешается, при поддержании оцененной точности состояния проскальзывания ремня, чтобы тем самым повышать преимущества снижения потребления энергии приведения в движение посредством снижения трения ремня.
Хотя устройство и способ управления для ременной бесступенчато регулируемой трансмиссии транспортного средства описаны с точки зрения примерного первого варианта осуществления, они не ограничены ими. Следовательно, следует понимать, что специалистами в данной области техники могут быть сделаны изменения в раскрытых вариантах осуществления без отступления от цели настоящего изобретения, как определено прилагаемой формулой изобретения.
Согласно первому варианту осуществления, предварительно определенное значение, которым средство ограничения скорости работы трансмиссии ограничивает скорость изменения передаточного отношения, задается равным значению, идентичному пороговому значению для условий разрешения и продолжения BSC "|скорость изменения управляющего передаточного отношения|". Тем не менее, оно не должно быть ограничено им. Альтернативно, оно может задаваться равным меньшему значению, чем пороговое значение.
Первый вариант осуществления описывает пример, в котором обычный и экономичный режимы вождения определяются из включения/выключения переключателя 89 экономичного режима (этап S21 на фиг.12). Тем не менее, оно не должно быть ограничено им. Альтернативно, обычный режим вождения или экономичный режим вождения могут быть определены независимо от действия переключения водителя, например, посредством мониторинга состояния движения (операция ускорения или торможения) или посредством результата определения режима вождения или включения системы автоматического переключения режима вождения.
Первый вариант осуществления описывает пример, в котором ограничение на ускорение транспортного средства разрешается даже во время обычного режима вождения при удовлетворении такого условия разрешения предельного ускорения, что скорость открытия дросселя равна или ниже порогового значения 2 (этап S26 на фиг.12). Это служит для повышения экономии топлива во время обычного режима вождения посредством расширения рабочего диапазона, в котором выполняется управление проскальзыванием ремня. Тем не менее, настоящее изобретение не должно быть ограничено таким примером. Альтернативно, ограничение на ускорение транспортного средства может запрещаться во время обычного режима вождения независимо от скорости открытия дросселя. Соответственно, на блок-схеме последовательности операций способа на фиг.12, последовательность операций опускает этап S26 и переходит к этапу S27, когда обычный режим вождения определяется на этапе S21 (когда результатом является "Нет"), и к этапу S24 без ограничения скорости изменения целевого передаточного отношения.
Первый вариант осуществления описывает пример, в котором ограничение на ускорение транспортного средства разрешается при удовлетворении такого условия разрешения предельного ускорения, что скорость открытия дросселя равна или ниже порогового значения 1 во время экономичного режима вождения, и что она равна или ниже порогового значения 1 во время обычного режима вождения. Вместо скорости открытия дросселя в качестве скорости раскрытия значения дросселя, ограничение на ускорение транспортного средства может быть определено посредством скорости открытия акселератора в качестве скорости нажатия педали акселератора.
Первый вариант осуществления описывает пример, в котором схема гидравлического давления с односторонним регулированием, управляемая посредством шагового электромотора, используется для модуля 7 управления гидравлическим давлением трансмиссии. Тем не менее, другой модуль управления гидравлическим давлением трансмиссии с односторонним или с двусторонним регулированием также может быть использован.
Первый вариант осуществления описывает пример, в котором колеблется только вторичное гидравлическое давление. Тем не менее, например, первичное гидравлическое давление вместе со вторичным гидравлическим давлением может одновременно колебаться в идентичной фазе посредством системы управления с прямым действием. Альтернативно, первичное гидравлическое давление вместе со вторичным гидравлическим давлением может колебаться в идентичной фазе посредством колебания давления в магистрали.
Первый вариант осуществления описывает пример средства колебания, в котором сигнал колебательного компонента накладывается на сигнал управляющего вторичного гидравлического давления во время арифметической операции. Альтернативно, выходной сигнал колебательного компонента может быть наложен на выходное значение соленоидного тока.
Первый вариант осуществления описывает пример варианта применения транспортного средства с двигателем, включающего ременную бесступенчато регулируемую трансмиссию. Настоящее изобретение также является применимым к гибридному транспортному средству, включающему ременную бесступенчато регулируемую трансмиссию, электромобилю, включающему ременную бесступенчато регулируемую трансмиссию, и т.п. Вкратце, оно является применимым к любому транспортному средству, включающему ременную бесступенчато регулируемую трансмиссию, которая выполняет управление трансмиссией на основе гидравлического давления.
Реферат
Группа изобретений относится к устройству и способу управления ременной бесступенчато регулируемой трансмиссией транспортного средства. Устройство содержит средство управления проскальзыванием ремня, средство установки ограничения, средство ограничения скорости работы трансмиссии. Средство управления проскальзыванием ремня выполнено с возможностью разрешать управление проскальзыванием ремня, когда средство ограничения скорости работы трансмиссии ограничивает скорость работы трансмиссии до предварительно определенного значения. Способ заключается в том, что задают колебание гидравлических давлений, когда скорость работы трансмиссии меньше предварительно определенного значения, извлекают колебательный компонент вследствие колебания из базового компонента фактического передаточного отношения, ограничивают скорость работы трансмиссии до значения меньше предварительно определенного значения, разрешают управление проскальзыванием ремня при решении ограничить ускорение транспортного средства. Технический результат заключается в снижении энергопотребления привода. 2 н. и 3 з.п. ф-лы, 20 ил.
Формула
- средство управления проскальзыванием ремня, выполненное с возможностью колебания вторичного гидравлического давления и извлечения колебательного компонента вследствие колебания из базового компонента фактического передаточного отношения, когда скорость работы трансмиссии меньше предварительно определенного значения, чтобы управлять вторичным гидравлическим давлением на основе разности (θ) фаз между колебательным компонентом фактического передаточного отношения и колебательным компонентом фактического вторичного гидравлического давления вследствие колебания, при этом скорость трансмиссии является скоростью изменения передаточного отношения;
- средство установки ограничения, выполненное с возможностью разрешения ограничивать ли ускорение транспортного средства; и
- средство ограничения скорости работы трансмиссии, выполненное с возможностью ограничивать скорость работы трансмиссии до значения меньше предварительно определенного значения, когда средство установки ограничения решает ограничить ускорение транспортного средства, при этом
- средство управления проскальзыванием ремня выполнено с возможностью разрешать управление проскальзыванием ремня, когда средство ограничения скорости работы трансмиссии ограничивает скорость работы трансмиссии до предварительно определенного значения.
- когда скорость работы трансмиссии меньше предварительно определенного значения, задают колебание гидравлических давлений и извлекают колебательный компонент вследствие колебания из базового компонента фактического передаточного отношения, с тем чтобы разрешать управление проскальзыванием ремня по гидравлическому давлению на основе разности (θ) фаз между колебательным компонентом фактического передаточного отношения и колебательным компонентом фактического вторичного гидравлического давления вследствие колебания, при этом скорость работы трансмиссии является скоростью изменения передаточного отношения; и
- ограничивают скорость работы трансмиссии до значения меньше предварительно определенного значения и разрешают управление проскальзыванием ремня при решении ограничить ускорение транспортного средства.
Документы, цитированные в отчёте о поиске
Бесступенчатая трансмиссия с возможностью управления крутящим моментом
Комментарии