Способ определения сопротивления движению транспортного средства - RU2422705C2
Код документа: RU2422705C2
Чертежи
Описание
Изобретение относится к способу определения сопротивления движению транспортного средства, который выполняется в совокупности с переключением автоматизированной коробки переключения передач с текущей передачи на результирующую передачу, при этом первое значение сопротивления движению tF_fw_1 определяется перед началом переключения, а второе значение сопротивления движению F_fw_2 определяют в более поздний момент времени для того, чтобы при большем изменении сопротивления движению ΔF_fw=F_fw_2-F_fw_1 произвести корректировку переключения.
Знание сопротивления движению транспортного средства имеет важнейшее значение для того, чтобы иметь возможность оптимально управлять характеристиками переключения автоматизированной коробки переключения передач, т.е. в соответствии с ситуацией движения. Так, на определение числа оборотов переключения, при котором осуществляется уход с текущей включенной передачи путем переключения, и определение результирующей передачи, на которую происходит переключение, существенное влияние оказывает текущее сопротивление движению транспортного средства.
Под сопротивлением движению транспортного средства F_fw, как известно, понимают сумму сопротивления подъему F_steig, сопротивления качению F_roll и сопротивления воздуху F_luft, т.е. F_fw=F_steig+F_roll+F_luft. Согласно общеизвестному уравнению для поиска сопротивления движению
F_zug=F_steig+F_roll+F_luft+F_träg=F_fw+F_träg
сопротивление движению связано с тяговым усилием F_zug приводного двигателя, приходящимся на ведущие колеса транспортного средства, и силу инерции F_träg транспортного средства, которую получают как произведение действительной массы m транспортного средства и текущего ускорения а транспортного средства с помощью уравнения F_träg=m·а. Тем самым, сопротивление движению F_fw можно определить следующим образом:
F_fw=F_zug-m·а.
В то время как определение сопротивления движению F_fw до и после переключения, т.е. при включенной передаче и включенном сцеплении двигателя, не представляет собой проблемы и может происходить известным способом посредством расчета тягового усилия F_zug исходя из крутящего момента двигателя и передаточного числа включенной передачи, а также посредством расчета силы инерции F_träg исходя из действительной массы m и текущего ускорения а транспортного средства, определение сопротивления движению F_fw во время переключения является сложным, так как в этой фазе на трансмиссию со стороны привода воздействуют в целом неизвестные или же сложно измеряемые усилия или крутящие моменты.
Например, в целом неизвестно, как быстро двигатель во время переключения уменьшает свой крутящий момент и снова увеличивает его, какая доля крутящего момента утрачивается за счет синхронизации результирующей передачи, и как могут сказаться на динамике движения транспортного средства, т.е. на текущем ускорении, крутильные колебания, которые могут возникать вследствие процесса переключения, а также выключения и включения сцепления двигателя, вследствие выключения текущей передачи и синхронизации и включения результирующей передачи или вследствие неровностей дорожного полотна. В силу этой проблематики в существующих на данный момент способах управления переключения коробки передач определение сопротивления движению во время переключения не проводится.
При в целом постоянном сопротивлении движению перед, во время и после переключения это не представляет абсолютно никаких проблем, так как выбранная заданная передача в целом оптимально согласована программой переключения при предположении приблизительно постоянного сопротивления движению F_fw в соответствии с имеющейся дорожной ситуацией.
Но если сопротивление движению F_fw во время переключения сильно изменяется, то это может приводить к проблемам, так как программа переключения устройства управления коробкой передач сначала исходит из неправильного сопротивления движению F_fw, а измененное правильное сопротивление движению F_fw может быть определено только с задержкой во времени по завершении переключения.
Например, если во время переключения на повышенную передачу транспортное средство въезжает с ровного участка на больший уклон, то по завершении переключения на повышенную передачу по причине возросшего сопротивления движению F_fw следует немедленно переключиться обратно на пониженную передачу. Но если такое переключение на пониженную передачу выполняется по причине задержки определения нового повышенного сопротивления движению F_fw слишком поздно, то транспортное средство при определенных обстоятельствах может остановиться, если образованный включенной в данный момент передачей крутящий момент двигателя больше не является достаточным для достаточного тягового усилия F_zug.
Такой проблематичной ситуации можно избежать не только немедленным переключением обратно на пониженную передачу, но также и изменением результирующей передачи во время переключения на повышенную меньшую передачу, например на передачу между текущей передачей и результирующей передачей (переключение на повышенную меньшую передачу), на исходную текущую передачу (результирующая передача = текущая передача, нет смены передаточного числа) или на передачу, расположенную ниже текущей передачи (переключение на повышенную передачу становится переключением на пониженную передачу). Однако подобные реакции требуют заблаговременного знания измененного, в выше приведенном примере повышенного, сопротивления движению F_fw.
Поэтому в основу настоящего изобретения положена задача разработки способа определения сопротивления движению F_tw, с помощью которого можно заблаговременно определять изменение сопротивления движению F_fw во время переключения для того, чтобы при необходимости иметь возможность своевременно внести необходимую корректировку переключения.
Решить эту задачу удается посредством способа определения сопротивления движению транспортного средства, который выполняется в совокупности с переключением автоматизированной коробки переключения передач с текущей передачи на результирующую передачу, при этом первое значение сопротивления движению tF_fw_1 определяют перед началом переключения, а второе значение сопротивления движению F_fw_2 определяют в более поздний момент времени для того, чтобы при большем изменении сопротивления движению ΔF_fw=F_fw_2-F_fw_1 произвести корректировку переключения.
При этом предусмотрено, что второе значение сопротивления движению F_fw_2 определяют во время переключения путем регистрации в течение интервала времени Δt, который включает в себя фазу переключения без тягового усилия, нескольких дискретных значений a_i текущего ускорения а транспортного средства, исходя из этих значений ускорения a_i при переключении под нагрузкой определяют минимум ускорения a_min и при переключении без нагрузки определяют максимум ускорения а_max, и с помощью этого экстремального значения ускорения (a_min или а_max) и массы транспортного средства m рассчитывают второе значение сопротивления движению (сопротивления движению во время переключения) F_fw_2 по формуле
F_fw_2=-m·a_min или же F_fw_2=-m·a_max.
Так как интервал времени Δt, в течение которого регистрируются значения ускорения a_i, включает в себя фазу переключения без тягового усилия, то при достаточном временном разрешении он соответствует по меньшей мере одному из значений ускорения a_i того ускорения транспортного средства а, которое вызывается только сопротивлением движению F_fw, так как по причине выключенной трансмиссии тяговое усилие двигателя не действует (F_zug=0).
Это значение ускорения a_i однозначно соответствует при переключении под нагрузкой (тяговом переключении) минимальному значению из значений ускорения a_i, т.е. минимуму ускорения a_min, а при переключении без нагрузки (переключении в режиме принудительного холостого хода) однозначно соответствует максимальному значению из значений ускорения a_i, т.е. максимуму ускорения а_max. Тем самым, с помощью соответствующего экстремального значения ускорения (a_min или а_max) и массы транспортного средства m по формулам
F_fw_2=-m·a_min или же F_fw_2=-m·a_max
рассчитывается относительно точное значение сопротивления движению F_fw во время переключения, которое по времени соответствует примерно середине переключения. Тем самым заблаговременно распознается изменение сопротивления движению ΔF_fw=F_fw_2-F_fw_1, поэтому при большем изменении сопротивления движению F_fw текущее переключение можно своевременно скорректировать.
Ускорение а транспортного средства, определенное во время переключения, т.е. во время фазы переключения без тягового усилия, с помощью экстремального значения из значений ускорения (a_min или а_max), также может использоваться для определения массы транспортного средства m. Но поскольку это относилось бы к другому способу, массу транспортного средства m в данном случае рассматривают как известную величину.
Если согласно предлагаемому способу во время или непосредственно после переключения определяется большее изменение сопротивления движению ΔF_fw, то реакция на это в смысле корректировки текущего переключения может выглядеть, например, следующим образом:
1. Ситуация движения:
Переключение под нагрузкой на повышенную передачу при въезде с ровного участка на подъем:
- после переключения на повышенную передачу немедленное переключение на пониженную передачу (быстрое последующее переключение);
- во время переключения корректировка результирующей передачи на ранее включенную текущую передачу (нет смены передаточного числа);
- во время переключения корректировка результирующей передачи на меньшую передачу (переключение на повышенную передачу становится переключением на пониженную передачу).
2. Ситуация движения:
Тяговое переключение на пониженную передачу при въезде с подъема на ровный участок:
- после переключения на пониженную передачу немедленное переключение на повышенную передачу (быстрое последующее переключение);
- во время переключения корректировка результирующей передачи на ранее включенную текущую передачу (нет смены передаточного числа);
- во время переключения корректировка результирующей передачи на большую передачу (переключение на пониженную передачу становится переключением на повышенную передачу).
3. Ситуация движения:
Переключение без нагрузки на пониженную передачу при въезде с уклона на ровный участок:
- во время переключения корректировка результирующей передачи на ранее включенную текущую передачу (нет смены передаточного числа).
Предпочтительные варианты осуществления предлагаемого способа являются предметом пунктов формулы с 2 по 10.
Для регистрации оптимального экстремального значения ускорения (a_min или а_max) предусмотрено, что значения ускорения a_i соответственно предпочтительным образом определяют с временным интервалом максимум в 10 мс. За счет этого, исходя из опыта обеспечивается, что по меньшей мере одно из значений ускорения a_i соответствует экстремальному значению (a_min или а_max), на который влияет только сопротивление движению F_fw.
Для исключения ошибок измерения и помех при регистрации значений ускорения a_i они целесообразным образом фильтруются перед определением экстремального значения ускорения (a_min или а_max), для чего могут использоваться общеизвестные численные способы.
Интервал времени Δt для регистрации значений ускорения a_i может начинаться с началом выключения сцепления двигателя и заканчиваться с окончанием включения сцепления двигателя. Хотя при этом начальные и конечные значения ускорения a_i по причине еще не полностью выключенного или отчасти уже снова включенного сцепления двигателя сильно искажены. Но эти значения ускорения a_i и без того выпадают при определении экстремального значения (a_min или a_max) и тем самым не оказывают отрицательного воздействия на определение ускорения во время переключения, т.е. во время фазы качения переключения. Но временной интервал Δt для регистрации значений ускорения a_i может быть и более коротким, и начинаться с момента начала выключения текущей передачи и заканчиваться с окончанием включения результирующей передачи.
Предлагаемый способ может предпочтительно применяться только в том случае, если во время переключения имеется однозначный минимум ускорения a_min или однозначный максимум ускорения a_max. Но это имеет место только при чистом переключении под нагрузкой (тяговый режим перед и после переключения) или при чистом переключении без нагрузки (режим принудительного холостого хода перед и после переключения).
Поэтому целесообразно, если перед определением сопротивления движению F_fw_2 или определением экстремального значения (a_min или а_max) из значений ускорения a_i сначала проверяют, является ли текущее переключение чистым переключением под нагрузкой или чистым переключением без нагрузки, и что определение второго значения сопротивления движению (сопротивления движению во время переключения) F_fw_2 выполняется только, если имеет место чистое переключение под нагрузкой или чистое переключение без нагрузки.
Для определения типа переключения предпочтительно определяют крутящий момент двигателя до начала переключения M_vS и после завершения переключения M_nS, при этом чистое переключение под нагрузкой имеет место в том случае, если оба значения крутящего момента больше нуля (M_vS>0 и M_nS>0), а чистое переключение без нагрузки имеет место, если оба значения крутящего момента M_vS, M_nS меньше нуля (M_vS<0 и M_nS<0).
Крутящий момент двигателя перед переключением M_vS принимается во внимание при определении первого значения сопротивления движению F_fw_1, при этом определение этого значения крутящего момента при абсолютно малом крутящем моменте M_vS является относительно неточным. Кроме того, при абсолютном малом крутящем моменте M_vS двигателя перед переключением разница ускорения между режимом под нагрузкой или же режимом без нагрузки перед переключением, а также качением в фазе без тягового усилия во время переключения относительно мала, поэтому помехи и ошибки измерения в этом случае могли бы проявиться сверхпропорционально. Согласно этому также и определение изменения сопротивления движению ΔF_fw=F_fw_2-F_fw_1 было бы сравнительно неточным, что при определенных обстоятельствах могло бы привести к неправильной реакции управления коробки передач.
Поэтому во избежание ошибочного определения сопротивления движению F_fw целесообразным образом предусмотрено, что сначала определяется крутящий момент приводного двигателя перед началом переключения M_vS и при наличии чистого переключения под нагрузкой сравнивается с ранее определенным минимальным моментом M_Zmin, и что определение второго значения сопротивления движению (сопротивления движению во время переключения) F_fw_2 выполняется только, если крутящий момент двигателя больше или равен минимальному моменту (M_vS>=M_Zmin).
В соответствии с этим, при наличии чистого переключения без нагрузки крутящий момент приводного двигателя перед началом переключения M_vS сравнивается с заранее определенным максимальным моментом M_Smax, и определение второго значения сопротивления движению (сопротивления движению во время переключения) F_fw_2 выполняется только, если крутящий момент двигателя меньше или равен максимальному моменту (M_vS<=M_Smax).
Также и приведение в действие тормозящих устройств, таких как рабочий тормоз, стояночный тормоз или гидро - или электродинамический тормоз - замедлитель, во время переключения привело бы к определению ошибочного экстремального значения ускорения (a_min или a_max), а тем самым и второго значения сопротивления движению F_fw_2, так как транспортное средство во время фазы без тягового усилия катится не свободно. При этом, например, приведение в действие рабочего тормоза, то есть колесных тормозов, может выполняться как водителем с помощью педали тормоза, так и автоматически с помощью управляющего устройства, например ESP или ASR. Во избежание неправильного по этой причине определения сопротивления движению F_fw целесообразным образом во время переключения регистрируется состояние приведения в действие тормозящих устройств транспортного средства, и при приведении в действие по меньшей мере одного из задерживающих устройств определение второго значения сопротивления движению (сопротивления движению во время переключения) F_fw_2 прерывается.
В целях пояснения изобретения к описанию прилагаются чертежи.
На чертежах показаны:
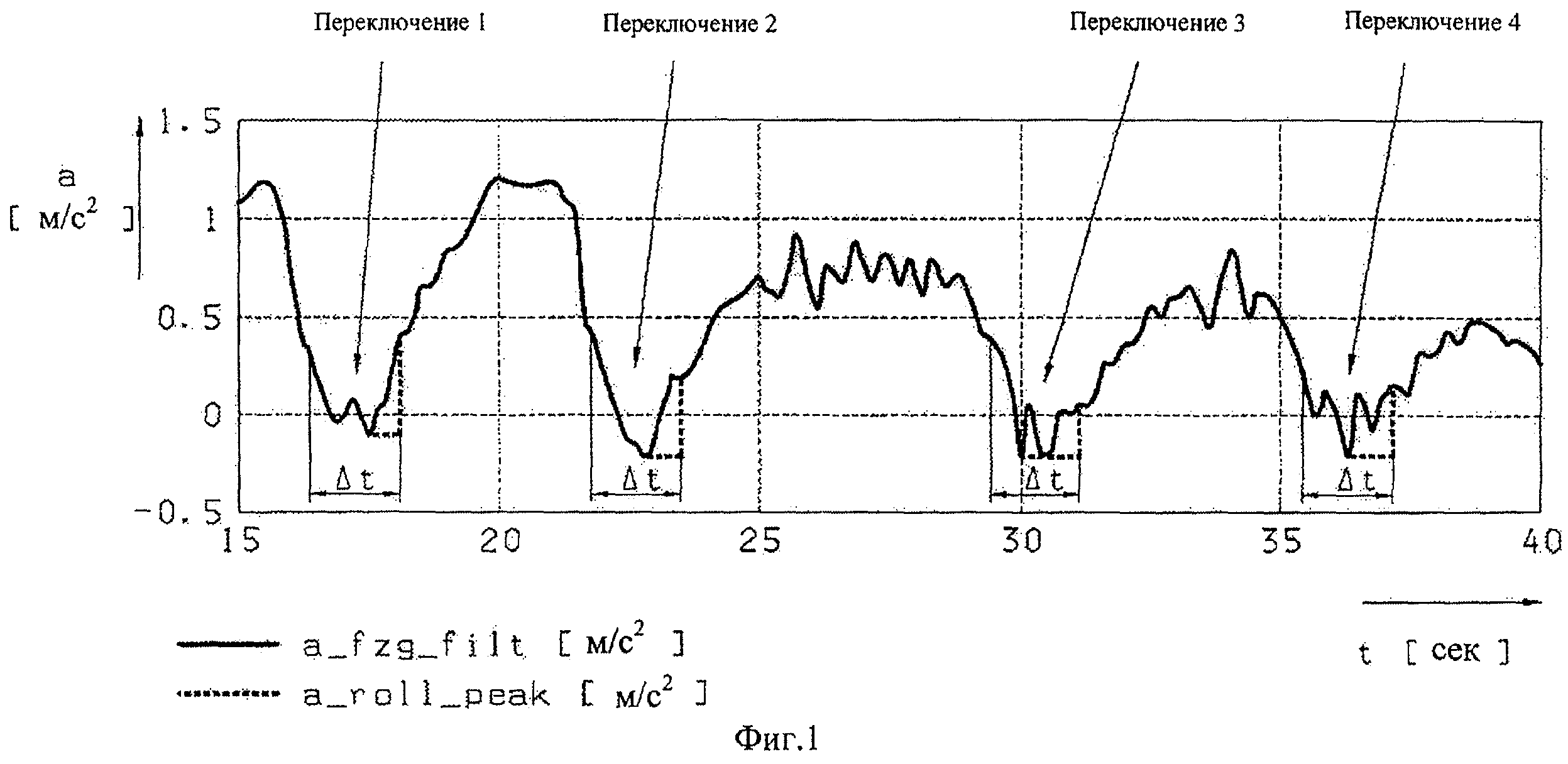
Фиг.1 - измеренная временная характеристика ускорения транспортного средства а при нескольких переключениях под нагрузкой, и
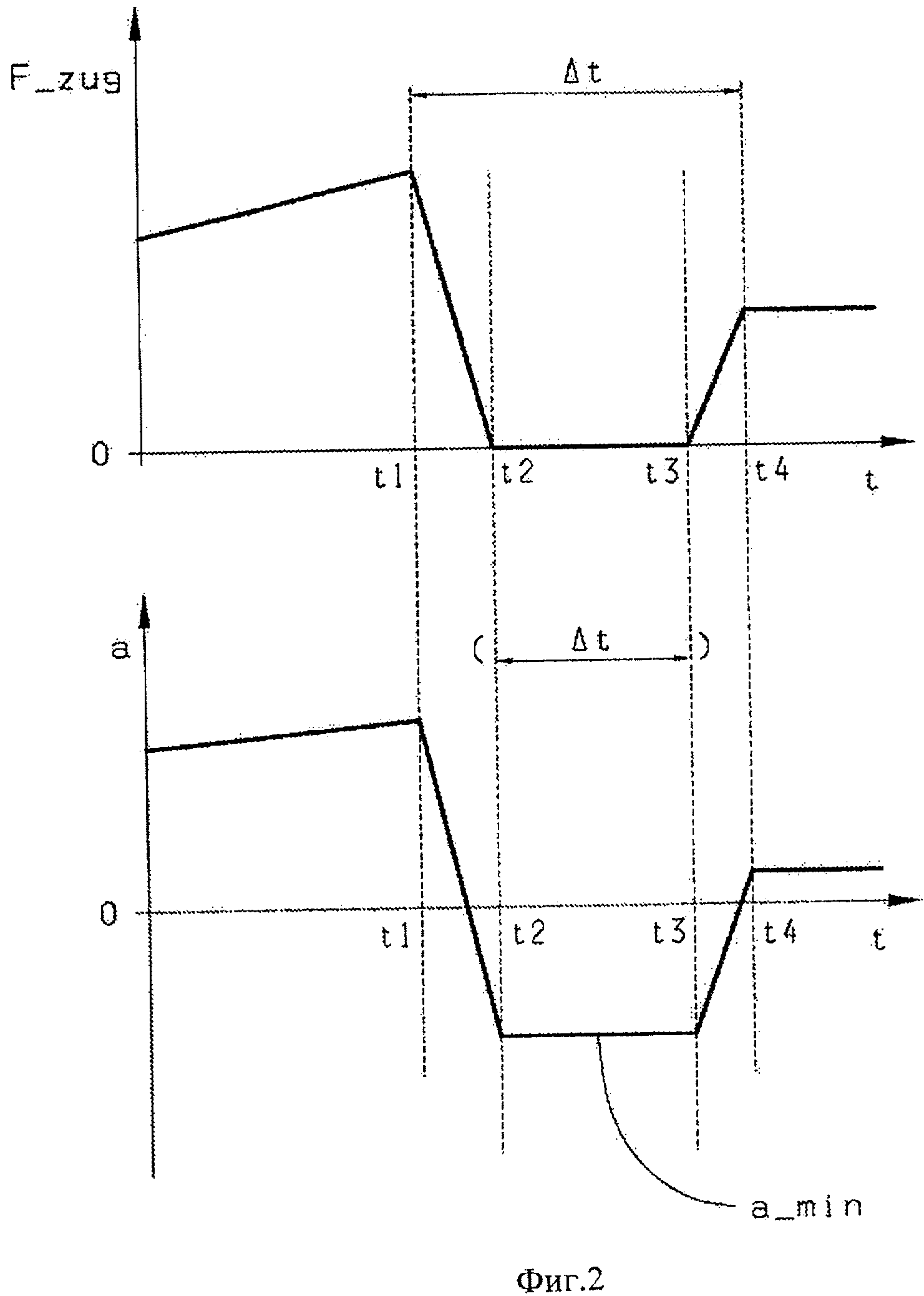
Фиг.2 - упрощенная временная характеристика тягового усилия F_zug и ускорения а при единственном переключении под нагрузкой на высшую передачу.
В способе согласно изобретению определение изменения сопротивления движению F_fw во время переключения передачи основывается на точном определении ускорения а транспортного средства в фазе качения переключения без тягового усилия. Определение этого значения ускорения в качестве примера наглядно представлено на диаграмме фиг.1, на которой представлена динамика ускорения а транспортного средства в течение нескольких связанных с прерыванием тягового усилия переключений. На ней непрерывная линия указывает отфильтрованные значения a_fzg_filt непрерывно, т.е. в заданном интервале в примерно 10-20 мс, определенных значений ускорения a_i. При переключениях речь идет в каждом случае о переключении под нагрузкой.
В соответствии с этим каждое из переключений приводит к резкому падению ускорения а, которое во время каждого из переключений принимает отрицательные значения <0 м/с2. Т.е. транспортное средство во время каждого из переключений притормаживается эффективным сопротивлением движению F_fw, так как трансмиссия временно выключена и на ведущие колеса не передается приводной момент в форме тягового усилия (F_zug=0).
Для определения ускорения а в фазе переключения без тягового усилия теперь при каждом переключении в течение интервала времени Δt, который включает в себя фазу без тягового усилия, определяют экстремальное значение зарегистрированных в этом интервале времени значений ускорения a_i. Так как в данном случае речь идет о переключениях под нагрузкой, то в каждом случае определяется минимум ускорения a_min.
Характеристика этого экстремального значения a_roll_peak представлена на фиг.1 соответственно прерывистой линией. Таким образом становится ясно, что благодаря способу, несмотря на сильные помехи в начале и в конце соответствующего переключения, достоверно определяют соответствующий минимум ускорения a_min. Каждый из этих минимумов ускорения a_min возможно однозначно соотнести с сопротивлением движению F_fw_2 в данный момент так, что таким образом можно относительно точно рассчитать сопротивления движению во время переключения F_fw_2.
На участках временной характеристики t, на которых прохождение a_roll_peak нельзя отличить от a_fzg_filt, в частности вне участков Δt, обе характеристики a_roll_peak и a_fzg_filt накладываются друг на друга.
Для дальнейшего наглядного представления способа на фиг.2 представлено переключение под нагрузкой на высшую передачу с упрощенными временными характеристиками ускорения а и соотнесенного с ведущими колесами тягового усилия F_zug приводного двигателя с большим временным разрешением. Переключение начинается в момент t1 и заканчивается в момент t4. Между моментами t1 и t2 сцепление двигателя выключается, и крутящий момент приводного двигателя понижается; при необходимости также уже выключается включенная текущая передача. Непосредственно перед моментом t3 происходит синхронизация подлежащей включению результирующей передачи и последующее ее включение. Включение сцепления двигателя и увеличения крутящего момента двигателя происходит между моментами t3 и t4.
Тем самым, фаза переключения без тягового усилия простирается примерно между моментом t2 и моментом t3, при этом в начале и конце этого интервала времени могут действовать как известно еще сильные помехи. Однако в середине фазы без тягового усилия в ускорении а в целом отсутствуют помехи, и оно соответствует искомому минимальному значению a_min.
Для надежного определения минимума ускорения a_min интервал времени Δt, в котором из текущих значений ускорения a_i или же a_fzg_filt определяется минимум ускорения a_min, выбирается таким образом, что фаза без тягового усилия достоверно располагается в нем. Интервал времени Δt может, например, как показано в верхней части фиг.2, проходить от момента t1 до момента t4 или, как показано в нижней части фиг.2, проходить от момента t2 до момента t3.
Реферат
Изобретение относится к способу определения сопротивления движению транспортного средства. Способ включает определение первого и второго значения сопротивления движению, значения экстремальных ускорений. Первое значение сопротивления движению определяют перед началом переключения. Второе значение сопротивления движению определяют во время переключения на основании экстремальных значений ускорений и массы транспортного средства. Технический результат заключается в обеспечении своевременной корректировки переключения. 9 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для управления ступенчатой коробкой передач с автоматическим переключением передач и электронной системой управления
Комментарии