Способ управления положением исполнительного механизма коробки передач - RU2702282C2
Код документа: RU2702282C2
Чертежи
Описание
Данное изобретение относится к мониторингу коробок передач, в частности гибридных коробок передач с кулачковыми муфтами, для обеспечения различных передаточных отношений коробки передач с использованием двух первичных двигателей, таких как тепловой двигатель и электрическая тяговая машина.
Более точно, изобретение относится к способу мониторинга положения исполнительного механизма коробки передач, предназначенного для введения в зацепление передаточного отношения в конце предварительной фазы синхронизации двух валов коробки передач с помощью тяговой машины, крутящий момент которой подвергается управлению с целью приведения разницы между скоростями двух валов в диапазон, который обеспечивает возможность их механического сцепления.
Данное изобретение применимо, в частности, но не исключительно, к известным как коробки передач с кулачковыми муфтами с переключательными исполнительными механизмами типа скользящего зубчатого колеса, не имеющих механических средств синхронизации. Однако синхронизация валов коробки передач является существенной для обеспечения возможности вхождения в зацепление кулачковых муфт во время переключения передач. Это требует точного управления первичным двигателем для создания управляемой разницы скоростей, позволяющей выполнять сцепление кулачковой муфты.
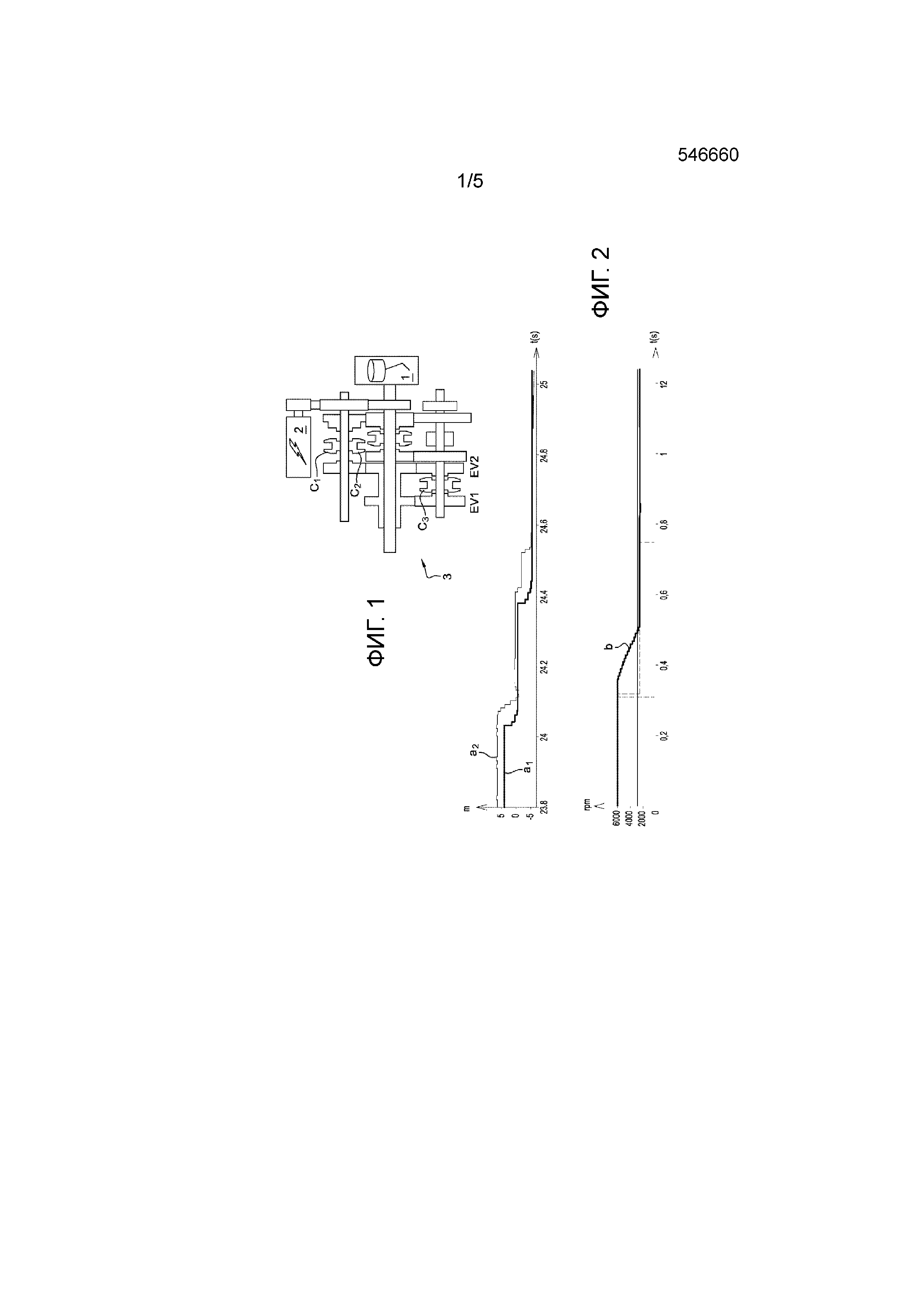
На фиг. 1 показан пример гибридной трансмиссии, состоящей из теплового двигателя 1, электрической машины 2 и коробки передач 3 с параллельными валами, снабженной тремя переключательными исполнительными механизмами С1, С2, С3 типа скользящего зубчатого колеса, без механической синхронизации. Для случая переключения передаточного отношения с EV1 (низшая передача) на EV2 (высшая передача) на фиг. 2 показаны различные стадии переключения. Кривые (а1) и (а2) показывают, соответственно, заданное положение кулачковой муфты и ее измеряемое положение. Положение свыше 5 мм означает, что включено передаточное отношение EV1. Положение меньше -5 мм означает, что включено передаточное отношение EV2. Для переключения передаточного отношения кулачковая муфта сначала переводится в нейтральное положение в точке 0 мм (передаточное отношение не включено). Затем используется контроллер электрической машины для приведения ее во вращение со скоростью, позволяющей включать передаточное отношение EV2. Кривая (b) скорости электрической машины показывает изменение с 6000 об/мин до примерно 2200 об/мин во время синхронизации. Когда скорость стабилизирована, то кулачковая муфта входит в зацепление для переключения в передаточное отношение EV2.
Для выполнения требований надежности для механизма, должно обеспечиваться выведение из зацепления кулачковых муфт из исходного передаточного отношения; в противном случае невозможна синхронизация электрической машины 2. Это обусловлено тем, что если выведение из зацепления не происходит, то алгоритм синхронизации машины будет прикладывать очень большой крутящий момент к коробке передач, с целью попытки согласования скорости двигателя для обеспечения синхронизации. В указанном выше примере переключения передаточного отношения, машина создает свой минимальный крутящий момент, который составляет примерно -220 Нм (крутящий момент торможения). Если выведение из зацепления не состоялось, и машина может создавать этот крутящий момент, то это приведет к не желательному замедлению, поскольку тормозящий крутящий момент машины передается на колесо. В случае обратного переключения (например, с EV2 на EV1), отказ выведения из зацепления приводит к не желательному ускорению.
В публикации FR 2 917 479 раскрыт датчик положения коробки передач для подтверждения информации о включенном передаточном отношении в системе управления. Этот датчик содержит щуп, взаимодействующий с мишенью, соединенной с внутренним исполнительным элементом коробки передач, таким как скользящее зубчатое колесо, для создания аналогового сигнала, преобразуемого в цифровой сигнал, поставляющий периодическую информацию, находится или нет исполнительный элемент в своем положении нулевой точки. Способ мониторинга, описание которого приведено в этой публикации, имеет тот недостаток, что требуется включение специальной системы датчика положения внутрь коробки передач на переключательном исполнительном механизме.
Данное изобретение имеет задачей обеспечения нейтрального положения гибридной коробки передач без физического датчика.
С этой целью предлагается обеспечение схождения измеряемой скорости одного из двух валов со скоростью, наблюдаемой в виде функции силы инерции, наблюдаемой на этом валу, относительно ожидаемой величины в виде функции исполнительного механизма коробки передач и оценочного значения крутящего момента машины. Предпочтительно, выполняются следующие операции:
- вычисления оценочного значения фактического крутящего момента, поставляемого машиной;
- уточнения величины наблюдаемой скорости с использованием последней наблюдаемой величины силы инерции;
- уточнения величины наблюдаемой силы инерции в виде функции разницы между измеряемой скоростью и наблюдаемой скоростью.
Для лучшего понимания данного изобретения ниже приводится описание не имеющего ограничительного характера варианта осуществления изобретения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 изображает упрощенную схему гибридной коробки передач;
фиг. 2 - кривые синхронизации переключения коробки передач;
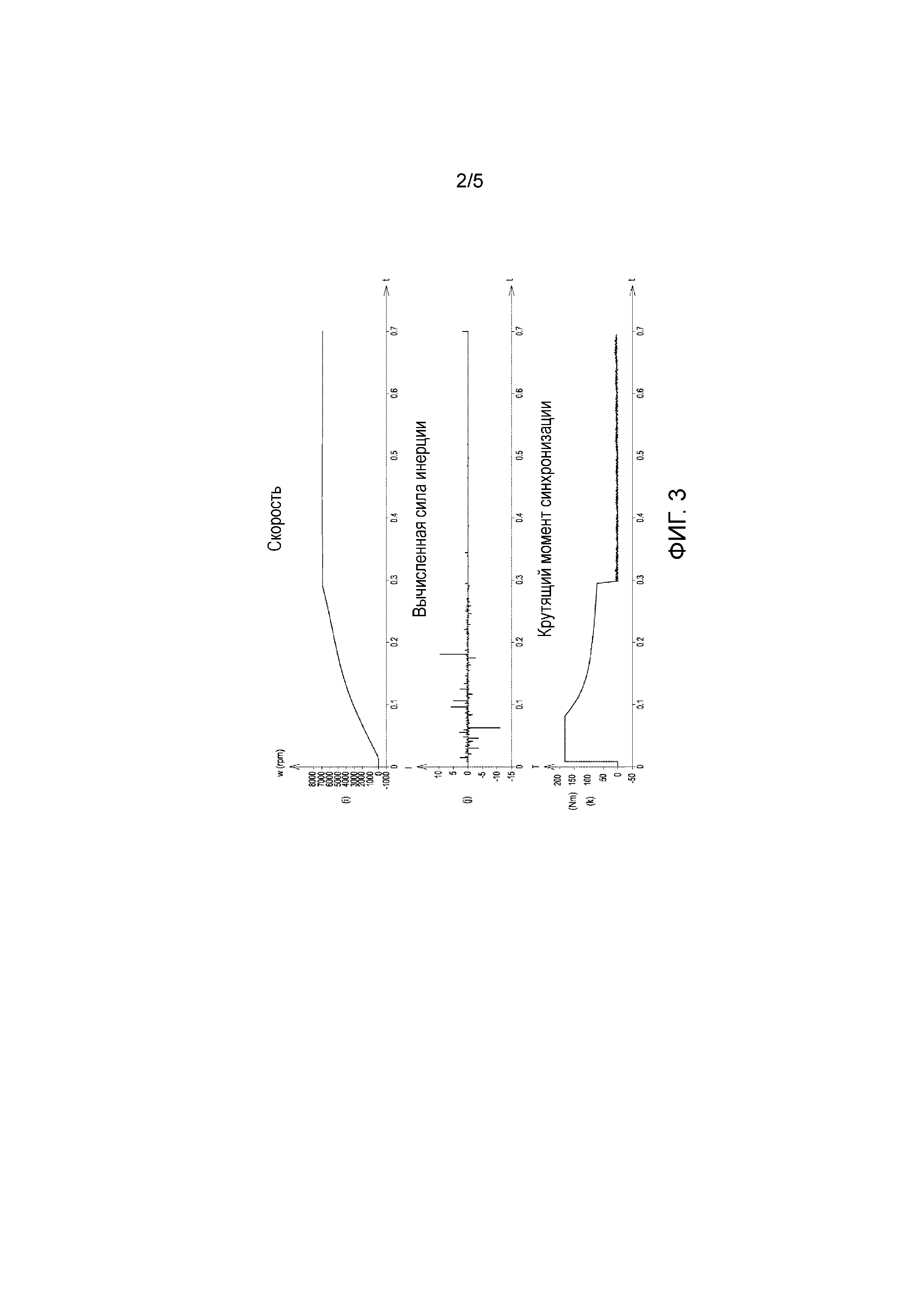
фиг. 3 - результаты первого способа вычисления;
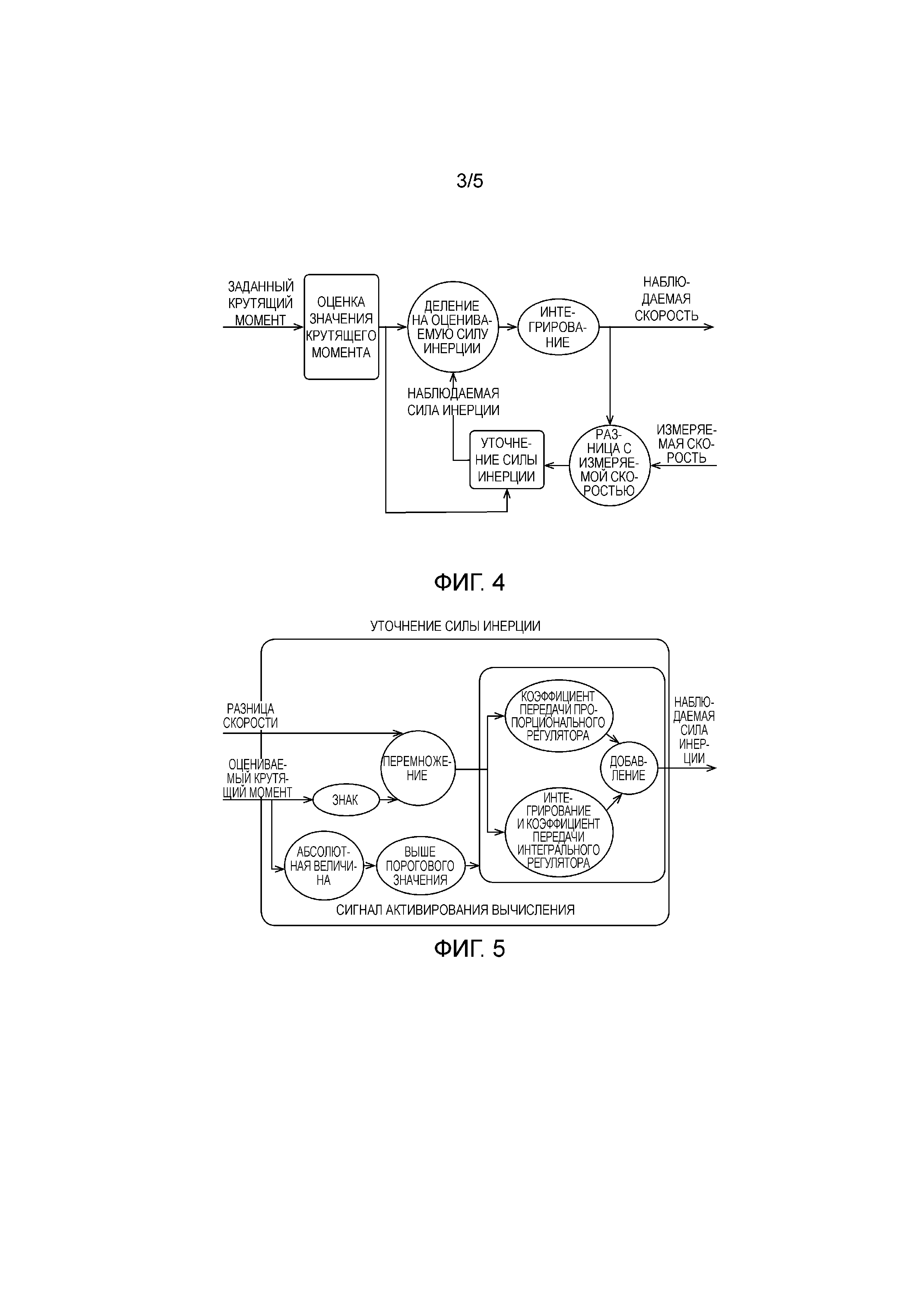
фиг. 4 - схематичное пояснение действия изобретения;
фиг. 5 - схему метода уточнения силы инерции;
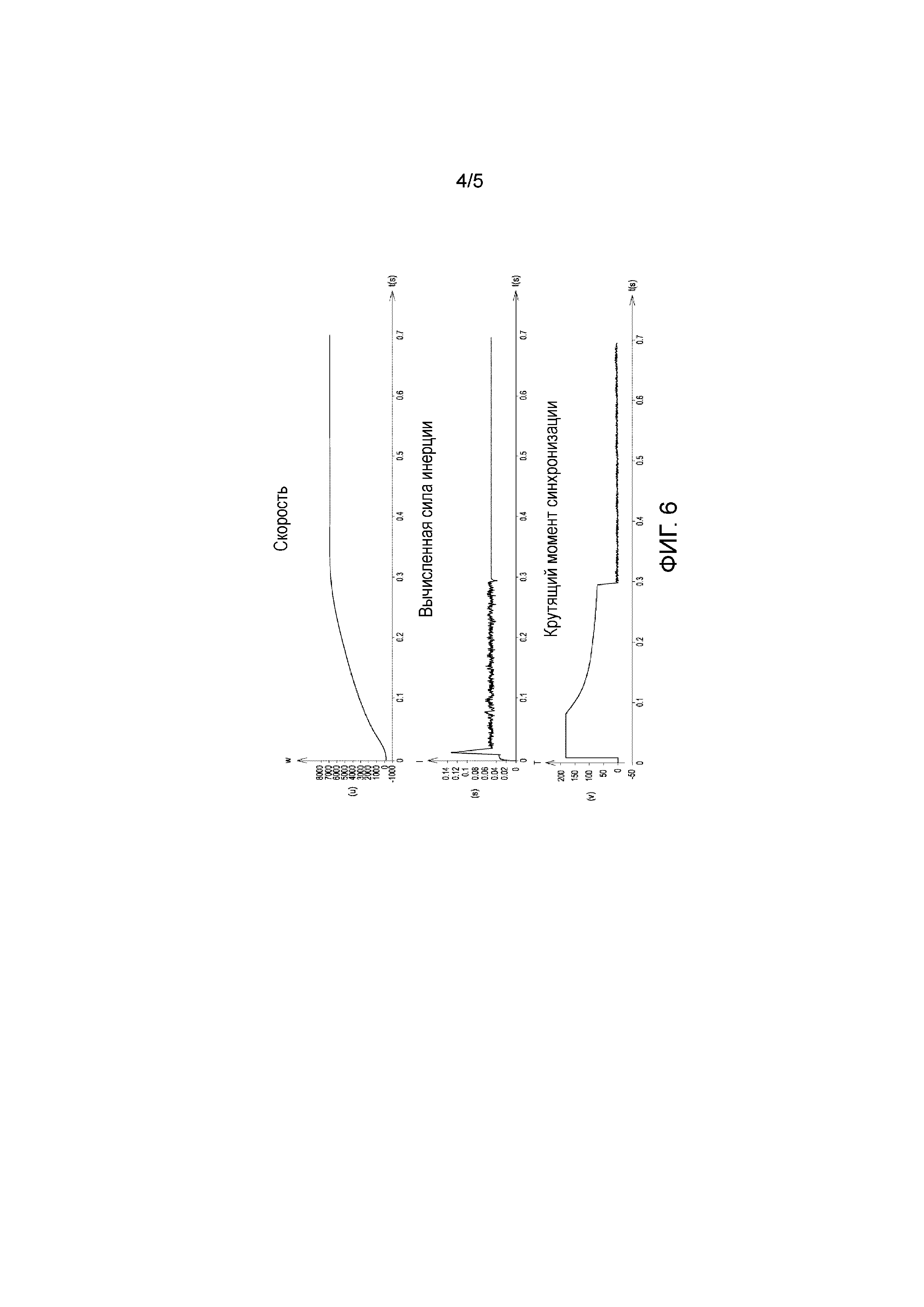
Фиг. 6 и 7 - результаты использования изобретения в номинальном случае и в случае отказа выхода из зацепления.
Уравнение движения вала, подлежащего синхронизации, имеет следующий вид:
J

где
- J - сила инерции вала, подлежащего синхронизации,
-
- T - крутящий момент, создаваемый валом с помощью электрической машины.
В вычислительный блок трансмиссии подается измеренная величина скорости ω вращения вала и крутящего момента Т в точке синхронизации. Эти данные используются для мониторинга положения исполнительного механизма коробки передач, предназначенного для включения передаточного отношения в конце предварительной фазы синхронизации двух валов коробки передач с помощью тяговой машины, управление крутящим моментом которой осуществляется с целью приведения разницы между скоростями двух валов в диапазон, который обеспечивает возможность их механического сцепления.
Как указывалось выше, предлагаемое решение для обеспечения нейтрального положения гибридной коробки передач основывается на оценке силы инерции вала коробки передач, подлежащего защите. Первый метод мониторинга силы инерции вала состоит в вычислении его ускорения посредством дифференцирования измеренной скорости, затем оценки силы инерции посредством деления заданного значения крутящего момента на полученное так ускорение. На фиг. 3 показаны результаты, полученные с помощью этого метода для специального примера. Изображенные кривые означают следующее:
- изменение скорости ω вдоль кривой (кривая i),
- непосредственное вычисление силы инерции J с помощью метода (кривая j), и
- заданное значение крутящего момента Т синхронизации на самой нижней кривой (кривая k).
За счет шума при измерении скорости, операция дифференцирования приводит к таким большим ошибкам, что этот метод не может обеспечивать точную оценку силы инерции, даже при добавлении фильтров нижних частот с целью сглаживания оценки. Для оценки силы инерции характеристики этого простого метода не достаточно высоки, чтобы быть приемлемыми.
Согласно изобретению, предлагается другой метод обеспечения точной оценки силы инерции, на который не оказывает влияния уровень шума при измерении, поскольку в нем не используется операция дифференцирования, которая может усиливать шум, а лишь операции интегрирования, которые отфильтровывают шум. Метод состоит в использовании наблюдателя скорости вала во время регулирования величины силы инерции для обеспечения совпадения измеряемой скорости с наблюдаемой скоростью. Согласно изобретению, обеспечивается, что измеряемая скорость двух валов сходится с наблюдаемой скоростью в виде функции наблюдаемой силы инерции на этом валу относительно ожидаемой величины в виде функции исполнительного механизма коробки передач и оценочного значения крутящего момента машины. Этот метод особенно пригоден для мониторинга переключения в нейтральное положение исполнительного механизма коробки передач во время изменения передаточного отношения, но может также использоваться в аналогичных условиях для мониторинга других положений исполнительного механизма, без выхода за объем изобретения.
Схема действия показана на фиг. 4. Блок для оценки реального крутящего момента является простым фильтром нижних частот при заданном значении крутящего момента, представляющего инерционность управления крутящим моментом электрической машины. Оценочное значение реального крутящего момента делится на оценочное значение силы инерции, и «наблюдаемая скорость» является интегрированным понятием этого отношения. Сила инерции уточняется на основе разницы между величиной «наблюдаемой скорости» и измеряемой скорости и на основе оценки реального крутящего момента, в блоке уточнения силы инерции.
Сила инерции уточняется в этом блоке в соответствии со схемой на фиг. 5, в контроллере силы инерции, в ответ на сигнал активирования. Этот сигнал подается, если абсолютная величина оценочного значения крутящего момента выше порогового значения. «Наблюдаемая сила инерции» вычисляется в контроллере на основе произведения разницы скорости и оценочного значения крутящего момента. Это является суммой коэффициента передачи пропорционального регулятора и коэффициента передачи интегрального регулятора (определяемого посредством интегрирования) этого произведения.
Для этого выполняются следующие стадии вычисления:
- вычисления оценочного значения крутящего момента, фактически поставляемого машиной, например, посредством фильтрации заданного значения, полученного из алгоритма синхронизации,
- уточнения наблюдаемой скорости с использованием последней наблюдаемой величины силы инерции,
- уточнения величины наблюдаемой силы инерции в виде функции разницы между измеряемой скоростью и наблюдаемой скоростью.
Последнее уточнение может выполняться в зависимости от условия, что заданное значение крутящего момента является достаточно большим для вызывания изменения скорости. Приемлемое пороговое крутящего момента составляет, например, примерно 5 Н⋅м для машины, которая может поставлять до 220 Н⋅м. Наблюдаемая скорость предпочтительно определяется посредством интегрирования оценочного реального крутящего момента, поделенного на последнюю величину наблюдаемой силы инерции.
Эта последовательность операций может воспроизводиться при каждом уточнении измерения скорости и крутящего момента синхронизации. В этом процессе мониторинг силы инерции коробки передач, подлежащей синхронизации, осуществляется посредством обеспечения схождения измеренной скорости одного из двух валов со скоростью, наблюдаемой в виде функции величины силы инерции, наблюдаемой на этом валу, и оценочного значения крутящего момента машины.
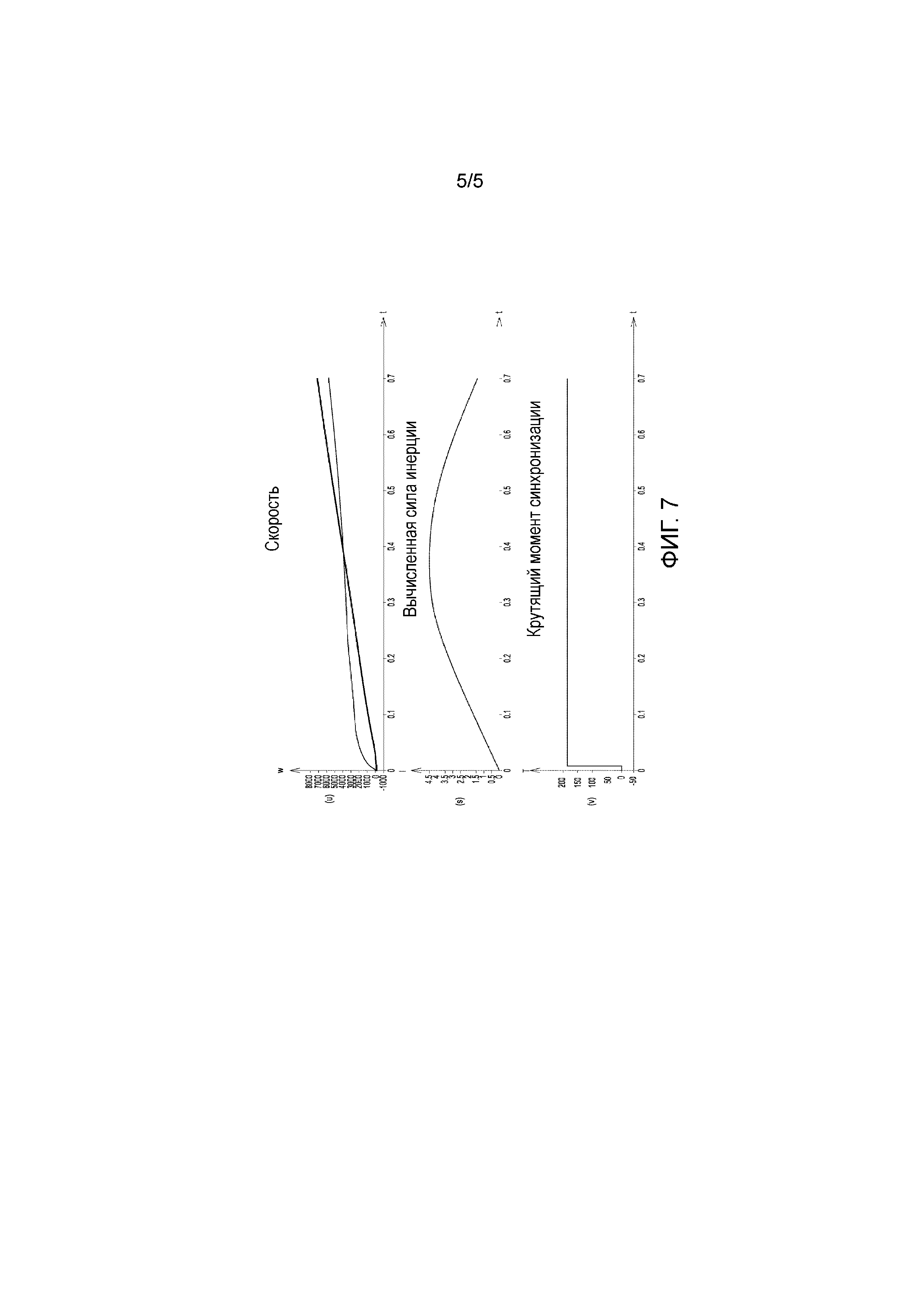
Результаты, полученные при использовании метода, показаны с помощью кривых на фиг. 6 и 7. На фиг. 6 показано применение метода при нормальной работе переключательного исполнительного механизма (без отказа сцепления кулачковой муфты). Первая кривая (u) показывает наложение измеряемой и наблюдаемой скоростей, при этом наблюдатель обеспечивает схождение наблюдаемой скорости в направлении измеряемой скорости. Вторая кривая (s) показывает изменение наблюдаемой силы инерции J. Последняя кривая (t) показывает изменение заданного значения крутящего момента Т синхронизации.
Кривые (u), (s), (y) на фиг. 7 соответствуют кривым на фиг. 6 и представляют отказ выхода из зацепления, поскольку наблюдаемая сила инерции превышает пороговое значение 900 гм2 примерно в течение 50 мс. В этом состоянии, если последовательность синхронизации останавливается лишь после 50 мс, то водитель не ощущает крутящий момент, подаваемый в колесо в этот небольшой интервал времени. За счет остановки последовательности можно исключать не желательные ускорения и замедления, которые обычно ощутимы при отказе выхода из зацепления.
Для обеспечения выполнения синхронизации при нормальных условиях, согласно изобретению предлагается введение «наблюдателя силы инерции» машины, который выполняет синхронизацию, в контроллер. Во время процесса управления в нормальных условиях, сила инерции на валу должна обычно ограничиваться силой инерции машины (поскольку кулачковая муфта находится в нейтральном положении), что составляет примерно 50 гм2. Однако, если происходит отказ выхода из зацепления, то сила инерции транспортного средства, преобразованная в силу инерции машины, приводит к эквивалентной силе инерции примерно 1 кгм2. Если сила инерции оперативно оценивается в соответствии с изобретением, то синхронизацию можно останавливать, как только наблюдаемая сила инерции превышает пороговое значение (например, 900 кгм2 в указанном примере).
Таким образом, предлагаемый способ состоит из последовательности операций для надежного обнаружения любых отказов исполнительного механизма коробки передач и для обеспечения переключения скоростей, если происходит отказ выхода из зацепления, за счет использовании виртуального «контроллера силы инерции», который добавляет коэффициент передачи пропорционального регулятора и коэффициент передачи интегрального регулятора к произведению разницы скорости и оценочного крутящего момента. Эта операция обеспечивает, что коробка передач имеет высокий уровень характеристик. В указанном примере выполнения контроллер может обнаруживать отказ исполнительного механизма в случае изменения отношения, равного 20, между прогнозируемой силой инерции и наблюдаемой силой инерции.
Также установлено, что точность оценки является достаточной для обеспечения других функций, таких как:
- контролирование выхода из зацепления тепловой машины посредством наблюдения уменьшения силы инерции, или
- обеспечения вхождения в зацепление новой передачи на основе изменения силы инерции транспортного средства, преобразованной в силу инерции двигателя.
Реферат
Изобретение относится к трансмиссиям транспортных средств. Способ контроля положения исполнительного механизма коробки передач, предназначенного для введения в зацепление передаточного отношения в конце предварительной фазы синхронизации двух валов коробки передач с помощью тяговой машины, заключается в том, что мониторинг переключения исполнительного механизма в нейтральное положение выполняется во время изменения передаточного отношения посредством обеспечения схождения измеряемой скорости одного из двух валов со скоростью, наблюдаемой в виде функции величины силы инерции, наблюдаемой на этом валу, относительно ожидаемой величины в виде функции исполнительного механизма коробки передач и оценочного значения крутящего момента машины. Способ подразумевает отсутствие датчика положения. 6 з.п. ф-лы, 7 ил.
Комментарии