Оптимизация управления автоматизированной коробкой передач, в частности автоматизированной коробкой передач грузового автомобиля - RU2539614C2
Код документа: RU2539614C2
Чертежи






Описание
Изобретение относится к способу управления автоматизированной коробкой передач, в частности автоматизированной коробкой передач грузового автомобиля (автомобиля для коммерческих перевозок). Изобретение также относится к устройству управления автоматизированной коробкой передач, в частности автоматизированной коробки передач грузового автомобиля. Изобретение также касается испытательного стенда, который пригоден для приводного двигателя, в частности приводного двигателя грузового автомобиля.
Для испытаний вновь разрабатываемых приводных двигателей, например - дизельных двигателей, обычно используют испытательные стенды для определения рабочих характеристик. Характерные состояния приводного двигателя можно моделировать и анализировать с помощью испытательных стендов такого типа для определения рабочих характеристик. В результате, некоторые испытания можно проводить на испытательном стенде, а не на дороге.
Вместе с тем перед окончательным разрешением нового приводного двигателя для серийного производства также нужно провести испытания и оптимизацию приводного двигателя на предмет совместимости с автоматизированной коробкой передач, которая подсоединена в передаточной цепи после приводного двигателя и образует неотъемлемую часть силовой передачи автомобиля, в частности грузового автомобиля. Как приводной двигатель, так и автоматизированная коробка передач имеет соответствующий электронный контроллер, причем эти контроллеры взаимодействуют посредством по меньшей мере одного интерфейса.
Интерфейс этого типа может, но не обязательно, отвечать требованиям международных стандартов, например, SAE 1939-71. Для испытаний и оптимизаций применительно к взаимодействию между приводным двигателем и коробкой передач оказываются существенными приложения, предусматривающие пробные и сравнительные поездки для реального автомобиля, которые приводят к относительно высоким затратам. Поэтому в современном уровне техники невозможно эксплуатировать автоматизированную ручную коробку передач, например - в грузовом автомобиле, без обязательного согласования коробки передач с приводным двигателем или силовой передачей автомобиля, и это усложняет ситуацию.
В документе DE 10 2005 057 809 A1 описана адаптация к соответствующей рабочей ситуации при осуществлении процесса управляемого переключения в автоматизированной ручной коробке передач автомобиля. В начале процесса переключения обнаруживают и оценивают по меньшей мере один параметр, который характеризует текущее рабочее состояние грузового автомобиля, и/или один параметр переключения, который характеризует предусматриваемый процесс переключения, а объем впрыска у приводного двигателя, связанный с крутящим моментом холостого хода, регулируемым образом согласуют с рабочим состоянием грузового автомобиля и/или с процессом переключения в виде функции результата оценки.
Поэтому задача изобретения состоит в том, чтобы упростить и усовершенствовать применение упомянутых способа и устройства между приводным двигателем и автоматизированной коробкой передач. Дополнительная цель состоит в том, чтобы конкретно описать подходящий испытательный стенд, способствующий такому применению.
Эта задача решается посредством признаков независимых пунктов формулы изобретения. Предпочтительные варианты развития и уточнения этих признаков являются объектами зависимых пунктов формулы изобретения.
В п.1 формулы изобретения предложен способ управления автоматизированной коробкой передач, которая связана с приводным двигателем, при котором данные и/или сигналы передают в контроллер автоматизированной коробки передач посредством интерфейса. В соответствии с изобретением, когда наступает заданное событие, в контроллер автоматизированной коробки передач передают прогнозируемый во времени неустойчивый профиль крутящего момента именно для этого события, вследствие чего контроллер коробки передач, то есть контроллер автоматизированной коробки передач, устанавливает и/или задает стратегию переключения передачи на основании этих переданных данных.
Ожидаемый, то есть прогнозируемый во времени профиль или ожидаемая (прогнозируемая во времени) структура крутящего момента двигателя, который или которую подают в контроллер коробки передач или контроллер автоматизированной коробки передач в соответствии с изобретением, представляет собой важное основание для процесса переключения, который надлежит осуществить оптимальным образом с помощью программного обеспечения контроллера коробки передач. Реализация решения в соответствии с изобретением между коробкой передач и приводным двигателем значительно упрощается, поскольку к коробке передач или контроллеру коробки передач в качестве основной переменной для «движущей силы автомобиля» при заданных событиях прикладывается только крутящий момент приводного двигателя, который может быть установлен или устанавливается простым способом на испытательном стенде. Вследствие этого значительную часть работы по внедрению можно провести простым способом на испытательном стенде, получая решение в соответствии с изобретением, вследствие которого можно сэкономить на дорогостоящих пробных поездках.
Неустойчивый профиль крутящего момента двигателя предпочтительно передают и задают в виде характеристических кривых, при этом установление характеристических кривых для соответствующего события происходит способом, предназначенным для конкретного двигателя, на испытательном стенде.
Событием предпочтительно считают процесс запуска. В простейшем случае, для этого события можно получать на испытательном стенде характеристические кривые по меньшей мере для крутящего момента, и поэтому, когда обнаруживают процесс запуска, прогнозируемый во времени неустойчивый профиль крутящего момента приводного двигателя можно передавать в контроллер коробки передач, и контроллер коробки передач устанавливает и/или задает стратегию переключения передачи для процесса запуска на основании упомянутого профиля крутящего момента приводного двигателя.
В этом случае, контроллер коробки передач преимущественно устанавливает скорость вращения при запуске и/или передачу при запуске на основании передаваемого профиля крутящего момента приводного двигателя.
Кроме того, событием можно считать операцию включения повышающей передачи или операцию включения понижающей передачи автоматизированной коробки передач. В простейшем случае характеристические кривые по меньшей мере для крутящего момента привода при этих событиях можно получать на испытательном стенде, и поэтому, когда обнаруживают процесс переключения, можно передавать в контроллер коробки передач прогнозируемый во времени, неустойчивый профиль крутящего момента приводного двигателя, а контроллер коробки передач при этом устанавливает и/или задает стратегию переключения передачи для операции включения повышающей передачи или операции включения понижающей передачи на основании упомянутого профиля крутящего момента приводного двигателя. В частности, в целях оперативного контроля операций переключения и/или во избежание неравномерной работы зубчатой передачи выгодно, в частности, чтобы контроллер коробки передач устанавливал, следует ли инициировать операцию переключения, т.е. процесс переключения, или нет, в частности - достаточен ли имеющийся крутящий момент для инициирования операции переключения, на основании передаваемого профиля крутящего момента приводного двигателя, чтобы достичь заданного поведения двигателя, в частности - заданного ускорения автомобиля.
Кроме того, событием можно также считать переход между работой в режиме движения накатом и работой в режиме приложения движущей силы или работой в режиме буксировки. В простейшем случае, характеристические кривые по меньшей мере для крутящего момента привода при этих событиях тоже можно получать на испытательном стенде, и поэтому, когда происходит переход между работой в режиме движения накатом и работой в режиме приложения движущей силы или работой в режиме буксировки, прогнозируемый во времени неустойчивый профиль крутящего момента приводного двигателя можно передавать в контроллер коробки передач, и контроллер коробки передач при этом устанавливает и/или задает стратегию переключения передачи для соответствующего перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы или соответствующей работой в режиме буксировки на основании упомянутого профиля крутящего момента приводного двигателя. Это может происходить, например, таким образом, что контроллер коробки передач устанавливает, должен ли быть инициирован переход между работой в режиме наката и работой в режиме приложения движущей силы либо переход к операции буксировки, или нет, на основании переданного профиля крутящего момента приводного двигателя. Тогда можно дополнительно включить торможение двигателем в случае работы в режиме буксировки.
Конкретно предпочтительным усовершенствованием является такое, при котором неустойчивый крутящий момент двигателя, то есть неустойчивый профиль крутящего момента приводного двигателя, задают для контроллера коробки передач способом, обусловленным конкретным двигателем, в виде функции номинального значения для соответствующей ступени норм выбросов, в качестве лишь двух примеров которых можно привести такие, как ступень норм выбросов, предусматривающая SCR (снижение концентраций выбросов с помощью селективного катализатора), или ступень EURO-VI норм выбросов приводного двигателя, который соответственно соединен с автоматизированной коробкой передач.
В соответствии с другим предпочтительным конкретным усовершенствованием, для заданных событий предлагается посылать по меньшей мере упомянутый неустойчивый профиль крутящего момента двигателя в контроллер коробки передач посредством отдельного средства управления, которое является устройством более высокого порядка по отношению к приводному двигателю и к автоматизированной коробке передач, или посредством отдельного средства управления, которое соединено с контроллером коробки передач или контроллером двигателя, при этом по меньшей мере один связанный с событием профиль крутящего момента хранится в упомянутом средстве управления таким образом, что к нему можно обратиться.
Вместе с тем в дополнение к вышеизложенному или - главным образом - в качестве альтернативы ему, в соответствии с решением, которое характеризуется меньшим количеством компонентов и является функционально целостным, можно также предусмотреть для заданных событий хранение по меньшей мере неустойчивого профиля крутящего момента двигателя для соответствующего приводного двигателя, при этом осуществляют передачу упомянутого неустойчивого профиля крутящего момента двигателя в контроллер коробки передач посредством интерфейса при обнаружении и возникновении заданного события.
В связи с обоими вышеупомянутыми вариантами можно также предусмотреть для заданных событий применительно по меньшей мере к неустойчивому профилю крутящего момента двигателя передачу в контроллер коробки передач или контроллер для приводного двигателя посредством операции программирования в конце линии конвейера (EOL-программирование), то есть операции программирования средств управления в конце сборочной линии.
Обнаружено, что на приводном двигателе, который взаимодействует с автоматизированной коробкой передач в грузовом автомобиле, по существу, все нагрузки, возникающие во время реальной работы, можно соотнести с событиями, заданными выше (процессом запуска, операцией включения повышающей передачи и операцией включения понижающей передачи, переход от работы в режиме движения накатом к работе в режиме приложения движущей силы, работе в режиме буксировки), и можно предположить, что заданные события отображают наивысшие требования применительно к динамике двигателя. Поскольку прогнозируемые во времени профили применительно к крутящему моменту двигателя для ранее представленных событий можно сделать доступными для программного обеспечения коробки передач, это можно также использовать на практике для других ситуаций. Кроме того, также существует фундаментальная возможность подачи других прогнозируемых во времени профилей других технических переменных приводного двигателя, таких, как объемы впрыска, давления наддува или еще коэффициент рециркуляции выхлопных газов (AGR).
В случае устройства управления автоматизированной коробкой передач, которая связана с приводным двигателем того типа, который указан во вводной части описания, задача изобретения решается за счет того, что предусмотрен интерфейс, посредством которого можно передавать данные и/или сигналы в контроллер автоматизированной коробки передач. В соответствии с изобретением в средстве управления предлагаемого устройства или в средстве управления, которое соединено с предлагаемым устройством реализованы неустойчивые и/или динамические профили по меньшей мере крутящего момента двигателя по меньшей мере для одного заданного события, которые могут быть направлены в контроллер автоматизированной коробки передач.
Как уже описано выше, контроллер этого типа предпочтительно может выдавать ожидаемые профили или те профили, которые соответствуют прогнозу, по меньшей мере крутящего момента двигателя посредством хранимых характеристических кривых типичных неустойчивых и/или динамических профилей крутящего момента двигателя в случае отдельных событий (например, процесса запуска, операции включения повышающей передачи или операции включения понижающей передачи, перехода от работы в режиме движения накатом к работе в режиме приложения движущей силы, работе в режиме буксировки) посредством, например, обычно используемой сети зоны управления (CAN) контроллера автоматизированной коробки передач. В каждом случае это сопровождается оптимизацией процесса переключения автоматизированной коробки передач. В рамках объема притязаний изобретения также находится способность выдавать другие переменные двигателя для прогноза с помощью контроллера коробки передач или программного обеспечения упомянутого контроллера коробки передач. Реализацию таких профилей можно вызывать в зависимости от времени, например, с помощью программного счетчика в виде отдельных наборов данных, которые хранятся в одномерной или многомерной форме. Вместе с тем можно также вызывать и выдавать полученное правило формирования, например формулу с временной зависимостью.
Изобретение также включает в себя испытательный стенд для приводного двигателя, применяемый для определения технических переменных упомянутого приводного двигателя, которые могут быть связаны с ним, а также быть связанными с его динамикой. Для моделирования реальных нагрузок на грузовом автомобиле вместе с его автоматизированной коробкой передач, связанной с приводным двигателем, и для создания возможности хранения и считывания по меньшей мере изменяющегося во времени профиля крутящего момента двигателя в связи с моделируемыми событиями нагружения, на испытательном стенде предусмотрена по меньшей мере одна программа испытаний.
С помощью этого испытательного стенда можно моделировать события, предпочтительно процесс запуска, операция включения повышающей передачи или операция включения понижающей передачи, переход от работы в режиме движения накатом к работе в режиме приложения движущей силы или работе в режиме буксировки. С испытательным стендом связан только приводной двигатель, который подлежит проверке, в случае грузового автомобиля это обычно дизельный двигатель. Выходной вал приводного двигателя соединен с возможностью фиксированного вращения с электрической машиной, например трехфазным асинхронным электродвигателем, который может работать в режиме генератора и/или режиме двигателя. Сеть грузового автомобиля заменяется соответствующей сетью испытательного стенда. Контроллер приводного двигателя осуществляет связь с сетью испытательного стенда. Зависимые от времени профили технических переменных приводного двигателя можно обнаруживать и хранить с каждым событием, которое моделируется на испытательном стенде. Следовательно, эти обнаруженные технические переменные, в частности крутящий момент двигателя, в частности - применительно к его изменяющемуся во времени профилю, можно выдавать для крутящего момента двигателя таким образом, что их можно считывать в целях реализации.
Ниже, посредством примера, не носящего сколько-нибудь ограничительный характер, будет приведено более подробное описание изобретения со ссылками на прилагаемые чертежи, при этом:
на фиг. 1 представлена схематическая иллюстрация грузового автомобиля, содержащего узлы силовой передачи;
на фиг. 2 схематически показана комбинация средства управления двигателя вместе со средством управления коробки передач и другими устройствами базового грузового автомобиля;
на фиг. 3 представлена схематическая иллюстрация испытательного стенда, который используется в рамках объема притязаний изобретения;
на фиг. 4 показаны циклы, которые осуществляются с помощью испытательного стенда в связи с составляющей цикла запуска, в связи с составляющей цикла операции включения повышающей передачи, в связи с составляющей цикла, которая касается перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы, а также в связи с операцией включения понижающей передачи; и
на фиг. 5 показаны зависимые от времени характеристические кривые крутящего момента двигателя, в частности, для запуска, для операций включения повышающей передачи, для перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы, а также для операций включения понижающей передачи.
В документе DE 198 02 736 A1 описан пример взаимодействия между приводным двигателем и автоматизированной ручной коробкой передач.
Кроме того, на фиг. 1 представлен в упрощенном виде схематический чертеж грузового автомобиля, на котором в качестве основных узлов силовой передачи изображены двигатель 1, сцепление 2, автоматизированная коробка 3 передач, карданные валы 4, шестерня 5 полуоси и шестерня 6 ступицы.
В данном случае средство EDC управления связано с двигателем 1, а средство TCU управления связано с коробкой 3 передач, включая сцепление 2. Управляющий компьютер FFR автомобиля, подсоединенный между упомянутыми средствами управления, соединен со средством EDC управления и со средством TCU управления посредством сети CAN, как можно увидеть также на фиг. 2. Вместе с тем другие блоки, которые показаны пунктирными линиями на фиг. 2 и не снабжены представлением в виде сокращенных обозначений, например другие устройства грузового автомобиля, не представляют дополнительный интерес для поясняемого изобретения.
Обмен данными между средством EDC управления и средством TCU управления происходит посредством многочисленных элементов данных и/или сигналов, которые определены в специальной области, например протоколе интерфейса, соответствующем стандарту SAE 1939-71.
Вместе с тем можно добавить дополнительные сигналы или можно оставить не используемыми отдельные сигналы, задающие конкретную связь между средством EDC управления конкретного приводного двигателя и средством TCU управления конкретной автоматизированной коробки передач.
Сигналы, которые относятся к крутящему моменту, фактически генерируемому двигателем, и фактической скорости вращения, имеют первостепенную важность для обмена данными между средством EDC управления и средством TCU управления. Эти сигналы посылаются средством TCU управления двигателя. Средство управления коробки передач может использовать эти данные для вычисления и обработки переменных, которые важны для работы средства управления коробки передач.
И наоборот, средство TCU управления коробки передач может посылать сообщения в средство управления двигателя и в процессе этого оказывать влияние на уменьшение или увеличение крутящего момента двигателя, а также включение и выключение торможения двигателем. В случае операций переключения автоматизированной коробки передач, необходимо как можно быстрее уменьшать крутящий момент двигателя, после того, как изменение передачи произошло, увеличивать крутящий момент определенным образом в соответствии с желаемой динамикой переключения. В случае операций включения повышающей передачи может понадобиться включение торможения двигателем, если момент инерции массы слишком велик, чтобы как можно быстрее достичь скорости вращения, которая требуется для синхронизации. Коробка передач может влиять на крутящий момент посредством сигнала запрашиваемого крутящего момента и/или сигнала ограничения крутящего момента в сообщении «Управление скоростью и/или крутящим моментом». Выраженное в процентах значение посылается к эталонному крутящему моменту двигателя, но оно сначала проверяется управляющим компьютером автомобиля перед тем, как направляется в двигатель или в средство управления упомянутого двигателя в качестве запрашиваемого крутящего момента.
На фиг. 3 изображен используемый испытательный стенд. В качестве объекта, подлежащего испытаниям на этом испытательном стенде, проверяется только приводной двигатель вместе с его контроллером EDC. Запросы крутящего момента, делаемые в процессе практической работы, генерируются в связи с валом двигателя посредством электродвигателя с характеристиками параллельного возбуждения, такого как трехфазный асинхронный электродвигатель, который, в конце концов, может работать и в режиме генератора и который соединен с компьютером испытательного стенда и средством EDC управления двигателя. Сообщения или сигналы, фактически посылаемые во время практической эксплуатации средства управления коробки передач, надлежащим образом имитируются самим компьютером испытательного стенда или дополнительными меньшими компьютерами, такими, как персональные компьютеры PC I и PC II, и посылаются в средство EDC управления посредством такой сети, как Ethernet, которая имитирует сеть CAN, используемую на практике. Сообщения и сигналы из средства EDC управления также посылаются посредством сети Ethernet с целью дополнительной оценки компьютером испытательного стенда.
В рамках объема притязаний изобретения, описываемый испытательный стенд имеет конкретную важность, в частности, для «динамического» режима работы (цикла). Поэтому можно проверять динамическое поведение приводного двигателя, обычно - дизельного двигателя. Процессы, которые подлежат моделированию, в ходе которого динамическое поведение оказывается релевантным, включают в себя, в частности, процессы запуска, операции включения повышающей передачи и операции включения понижающей передачи, а также переход от работы в режиме движения накатом к работе в режиме приложения движущей силы. Цель моделируемых процессов во время пробной или испытательной эксплуатации состоит в том, чтобы получить информацию о том, как крутящий момент обычно ведет себя с точки зрения коробки передач в случае типичных функций коробки передач. Тогда программное обеспечение, которое воплощено, в частности в средстве TCU управления коробки передач, может использовать эту информацию, чтобы проконтролировать, достаточен ли профиль и уровень крутящего момента на заранее выбранной шестерне для того, чтобы избежать неправильных операций переключения до того, как упомянутое средство инициирует операцию переключения или выбирает первую передачу.
Цикл «динамических» испытаний основан на реальных измерениях, проводимых на автомобиле. Следовательно, чтобы еще раз пояснить это, отметим, что выбираются репрезентативные процессы переключения, которые и адаптируются для проведения экспериментов на испытательном стенде с помощью технических программ, которые предназначены для этой цели. Цикл испытаний содержит четыре последовательных отдельных цикла. Этими циклами являются, в частности, четыре процесса запуска, шесть операций включения повышающей передачи, два перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы, а также пять операций включения понижающей передачи.
В зависимости от режима работы, испытательный стенд моделирует заранее заданные профили крутящего момента и заранее заданные профили скорости вращения до и после срабатывания сцепления. Квадранты профилей скорости вращения аналогичным образом берутся из измерений с использованием реального автомобиля.
Процессы запуска представляют собой компромисс между наивысшей возможной первой передачей и износом сцепления. В процессе запуска приходится выбирать подходящую передачу, чтоб автомобиль смог начать движение, в частности, по склону, с учетом повышения динамической нагрузки.
В течение процесса запуска сигнал «Запрашиваемый крутящий момент двигателя и/или предел крутящего момента» запрашивается посредством программного обеспечения коробки передач.
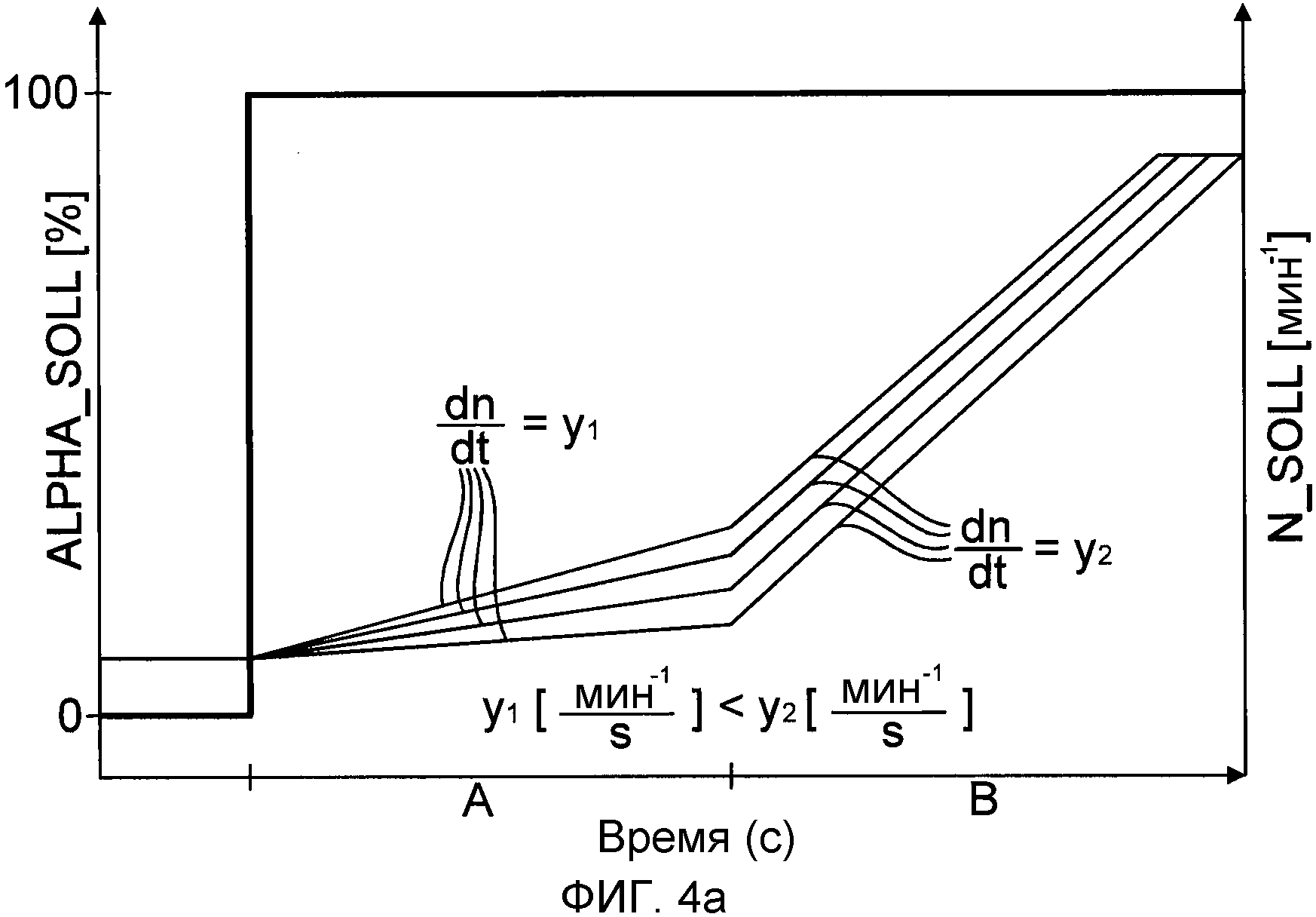
В других отношениях отметим, что на фиг. 4a изображена составляющая цикла «запуска». Абсцисса разделена на участки, причем участок A иллюстрирует увеличение крутящего момента и моделируемого процесса запуска. Участок В иллюстрирует возможное срабатывание сцепления и моделируемый режим движения. Ордината на левой стороне иллюстрирует заранее заданный, нормализованный крутящий момент, обозначенный как «ALPHA_SET». По ординате на правой стороне отложены скорости вращения, обозначенные как «N_SET».
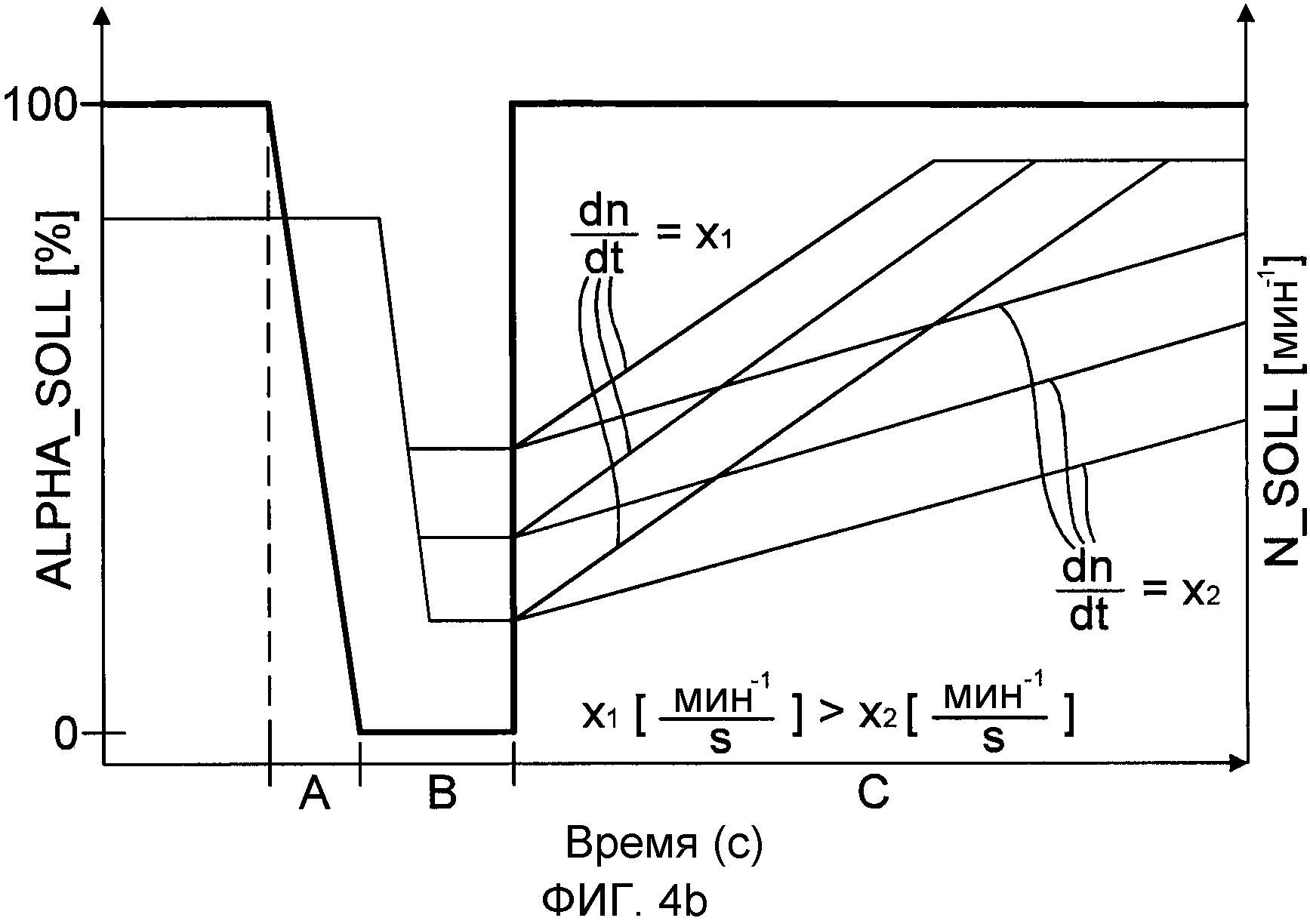
Операции включения повышающей передачи отличаются тем, что, начиная с высокого уровня скорости вращения, коробка передач переключается на более низкий уровень скорости вращения с учетом изменения передаточного отношения коробки передач посредством переброса шестерен. В других отношениях отметим, что на фиг. 4b изображен цикл «операции включения повышающей передачи». Абсцисса разделена на участки. Участок А иллюстрирует снижение нагрузки. Участок В иллюстрирует синхронизацию и изменение передачи. Участок С иллюстрирует увеличение крутящего момента и моделируемый режим движения.
В составляющей цикла, касающейся «перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы», определенная скорость вращения принимается за базис, а затем заранее заданное значение крутящего момента уменьшается до заранее заданного значения, а потом снова увеличивается до другого значения крутящего момента, например 100%, то есть делается переключение на работу в режиме приложения движущей силы. В этой связи обратимся к фиг. 4c. Абсцисса разделена на участки. Участок А иллюстрирует работу в режиме приложения движущей силы. Участок В иллюстрирует работу в режиме наката. Участок С иллюстрирует работу в режиме приложения движущей силы.
В случае операций включения понижающей передачи коробка передач коробка передач переключается с более низкой скорости вращения двигателя на более высокий уровень скорости вращения. Обратимся к фиг. 4d. Абсцисса разделена на участки. Участок А иллюстрирует снижение нагрузки. Участок В иллюстрирует синхронизацию и изменение передачи. Участок С иллюстрирует увеличение крутящего момента и моделируемый режим движения.
С учетом экспериментов на испытательном стенде обнаружено, что увеличение крутящего момента со временем, как бывает в случае типичных функций коробки передач, неизвестно для коробки передач, а также не учитывается программным обеспечением средства управления двигателя. Однако для работы коробки передач или контроллера упомянутой коробки передач важно знать, например с целью вычисления скорости вращения при запуске, какой крутящий момент при какой скорость вращения может выдать двигатель. Кроме того, чтобы также учесть движущую силу автомобиля для оперативного контроля операций переключения, контроллеру также должны быть известны профили скорости вращения и профили крутящего момента, которые возникают при событии операций переключения.
Поэтому проводились проверки, чтобы определить, какие профили крутящих моментов получаются для циклов вышеописанных составляющих, в частности, моделируемого «процесса запуска», моделируемой «операции включения повышающей передачи», моделируемой «операции включения понижающей передачи» и моделируемого «перехода между работой в режиме движения накатом и операцией приложения движущей силы», для конкретных двигателей в испытываемых узлах. В этом случае, дополнительно регистрировались другие переменные, такие, как подводимый крутящий момент, объемы впрыска, давления наддува, коэффициент рециркуляции выхлопных газов (AGR).
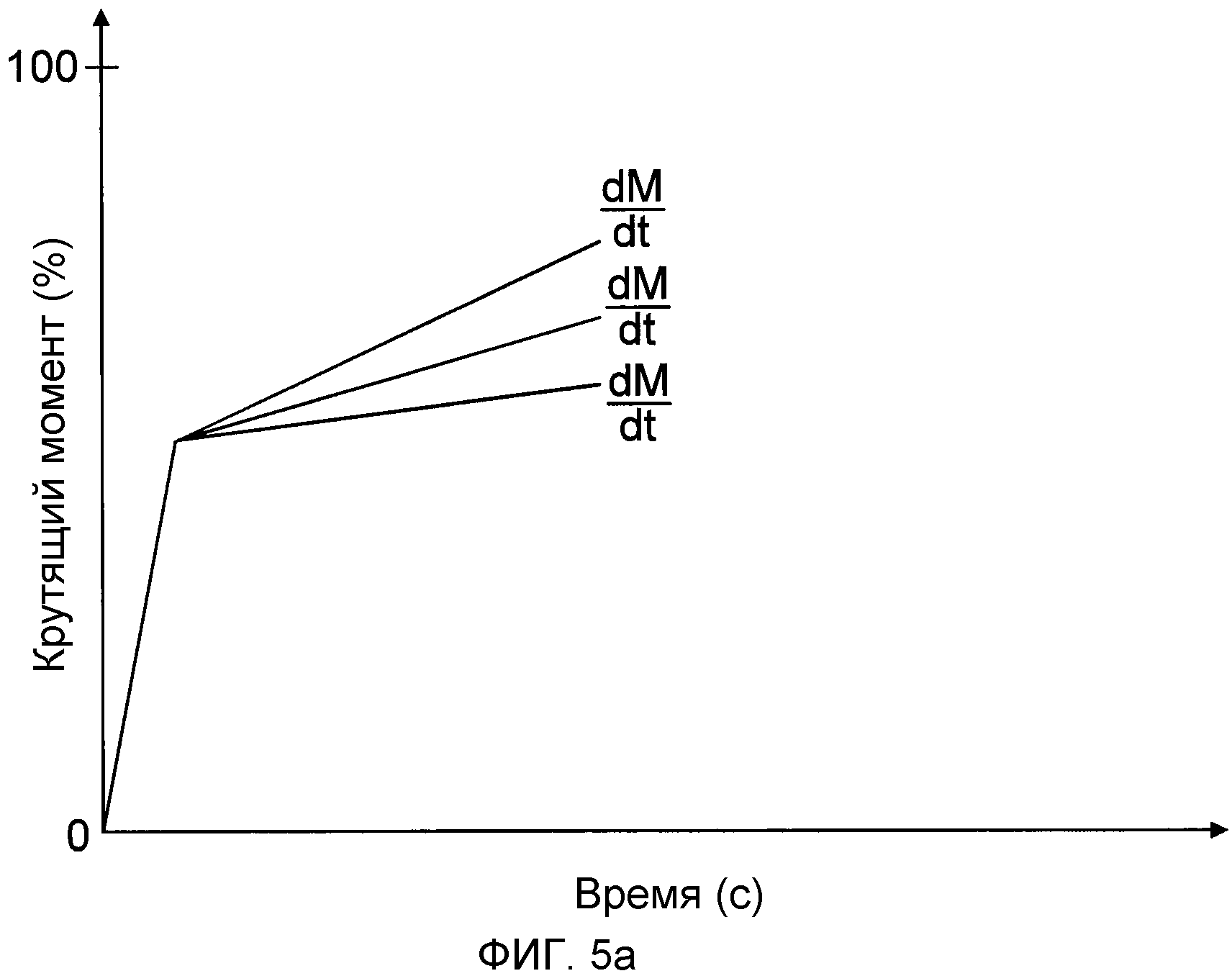
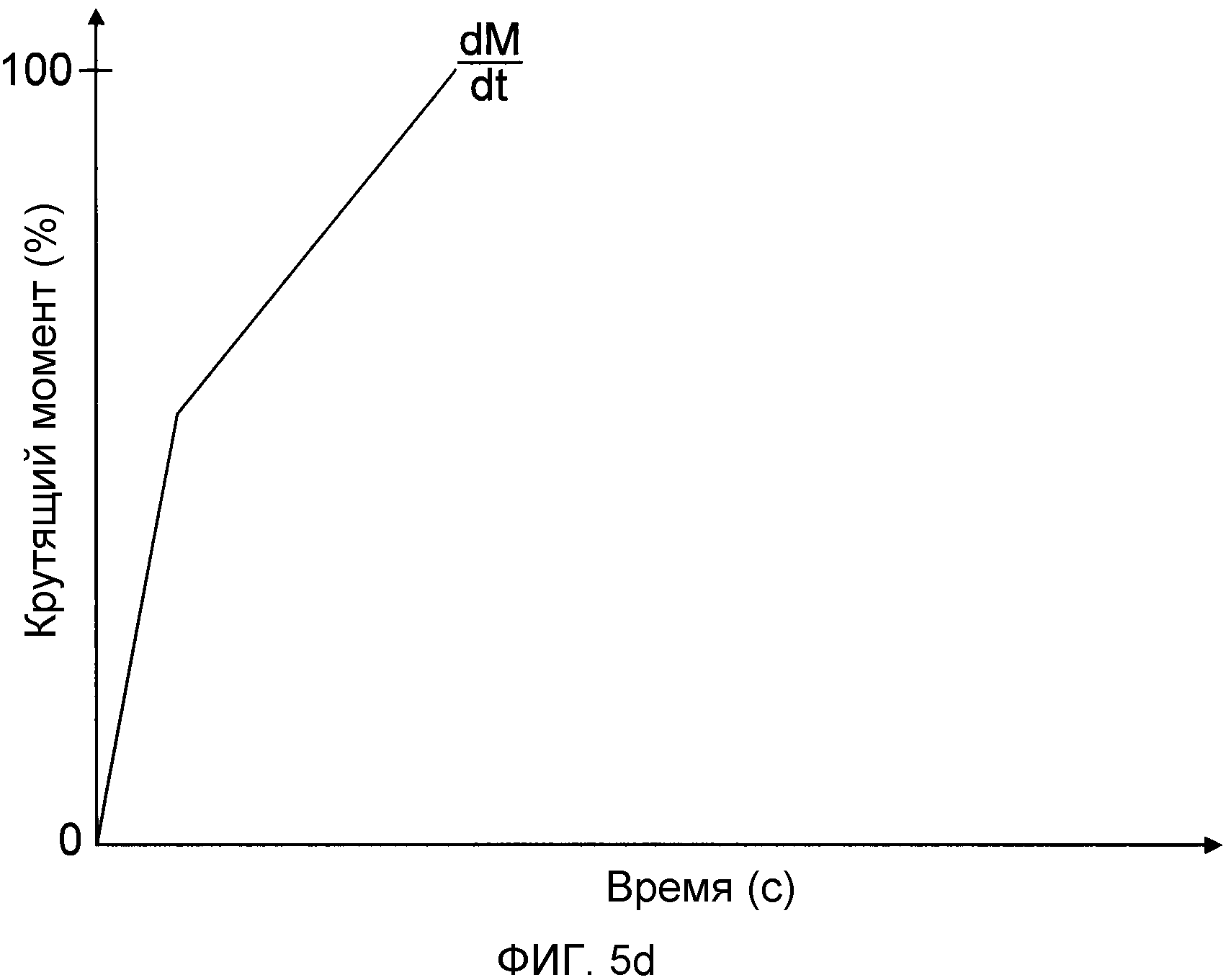
В результате появилась возможность установить, что существует доказуемая временная задержка между запросом крутящего момента и увеличением крутящего момента. В этом случае оказалось возможным идентифицировать воспроизводимый характер увеличения крутящего момента. Увеличение крутящего момента можно описать как происходящее до тех пор, пока по градиенту не достигается полная нагрузка, начиная от подводимого крутящего момента, то есть крутящего момента двигателя без наддува, даже если уровень крутящего момента при полной нагрузке может изменяться во время эксплуатации автомобиля. А такие пределы, наоборот, не влияют на градиент крутящего момента, и он сохраняет свою достоверность. В других отношениях отметим, что сравнительный пример полученных характеристических кривых, связанных с профилем крутящего момента в случае запуска, приведен на фиг. 5a, сравнительный пример в случае операций включения повышающей передачи приведен на фиг. 5b, сравнительный пример в случае перехода между работой в режиме движения накатом и работой в режиме приложения движущей силы приведен на фиг. 5c, сравнительный пример в случае операций включения понижающей передачи приведен на фиг. 5d, и они совместно задают конкретный тип двигателя как испытуемого узла.
На фиг. 5а изображен градиент увеличения крутящего момента для различных скоростей вращения. На фиг. 5b показано, что градиент увеличения скорости вращения является конкретным значением для всех проверенных операций включения повышающей передачи вплоть до крутящего момента при полной нагрузке. На фиг. 5c показано, что увеличение скорости вращения тоже является конкретным значением для всех переходов между работой в режиме движения накатом и работой в режиме приложения движущей силы вплоть до крутящего момента при полной нагрузке. Наконец, на фиг. 5d показано, что увеличение скорости вращения опять является конкретным значением для всех операций включения понижающей передачи вплоть до крутящего момента при полной нагрузке.
Исходя из результатов, которые безошибочно привели к описанию динамики двигателя, следует отметить, что увеличение скорости вращения (в связи с подводимым крутящим моментом) зависит от давления наддува перед переключением автоматизированной коробки передач, от времени переключения, стратегии впрыска, целевой скорости вращения и градиента скорости вращения. Даже если эти зависимости дополнительно расширяются во время реального режима движения, изобретение дает характеристические кривые, которые делают возможным предоставление заложенных в их основу зависимостей в средство управления коробки передач. Сохраненные значения, которые можно также хранить в многомерной форме в области памяти, по существу, любого желаемого средства управления или запоминающего устройства, можно считывать зависимым от времени способом, например, посредством функции подсчета, подавать в контроллер коробки передач в качестве сообщения в рамках смысла прогноза.
В общем и целом обнаружено, что операции переключения и операции перехода из режима движения накатом являются экстремальными состояниями, а управление упомянутыми состояниями также дает возможность управлять другими рабочими состояниями в режиме реального движения. Операции включения повышающей передачи инициируются, начиная с очень высокого уровня давления наддува, и обнаружено также, что время переключения является очень коротким. Это означает, что характеристическая кривая, которая получена на основании операций включения повышающей передачи, отображает максимальную возможную динамику увеличения крутящего момента. В отличие от этого переходы от работы в режиме движения накатом к работе в режиме приложения движущей силы, которые характеризуются низким давлением наддува, отображают случай минимальной возможной динамики увеличения крутящего момента. То есть все профили крутящего момента должны лежать между этими двумя характеристическими кривыми. Средний уровень давления наддува, а значит - и средний подводимый крутящий момент, и градиенты увеличения скорости вращения отображаются характеристическими кривыми, основанными на операциях включения понижающей передачи.
Реферат
Изобретение относится к способу управления автоматизированной коробкой передач, в частности автоматизированной коробкой передач грузового автомобиля, которая соединена с приводным двигателем, при котором данные и/или сигналы передают в контроллер автоматизированной коробки передач посредством интерфейса. При наступлении заданного события в контроллер автоматизированной коробки передач передают прогнозируемый во времени неустойчивый профиль крутящего момента приводного двигателя для этого события. Контроллер коробки передач устанавливает и/или задает стратегию переключения передачи на основании этих переданных данных. В целях контроля операций переключения передач и/или во избежание неравномерной работы зубчатой передачи контроллер коробки передач на основании переданного профиля крутящего момента приводного двигателя устанавливает, должна ли быть инициирована операция переключения или нет, в частности достаточен ли имеющийся крутящий момент для инициирования операции переключения, чтобы достичь заданного поведения двигателя. Изобретение направлено на упрощение и усовершенствование способа. 9 з.п. ф-лы, 11 ил.
Комментарии