Устройство переключения - RU2561667C2
Код документа: RU2561667C2
Чертежи


Описание
ОБЛАСТЬ И УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к устройству переключения для установки режима движения транспортного средства в ответ на действие переключения, выполняемое водителем.
В качестве одного типа рычагов переключения транспортных средств, таких как автомобили, присутствует рычаг переключения, который выполнен с возможностью автоматического возврата в его исходное положение в состоянии, при котором к нему со стороны водителя не прикладывается сила. Данный тип рычага переключения также именуется как рычаг-джойстик.
В некоторых транспортных средствах, оборудованных данным типом рычага переключения, вследствие этого режим движения устанавливается в нейтральный режим в том случае, когда рычаг переключения удерживается в нейтральном положении в течение более чем определенного времени (например, 1 секунды).
Методика отмены функции автопарковки в случае, когда действие переключения выполняется в соответствии с шаблоном действия, указанным в качестве кода дешифрования, раскрывается в документе JP 2010-190311 A.
В таком транспортном средстве, как описанное выше, водителю, который пытается установить режим движения в нейтральный режим, требуется непрерывно удерживать рычаг переключения в нейтральном положении против силы возврата в исходное положение. Предполагается, что данный вид действия сложно выполнить аккуратно в том случае, когда водитель волнуется, и есть вероятность того, что сложно быстро установить режим движения в нейтральный режим.
Методика, раскрываемая в документе JP 2010-190311 A, главным образом направлена на отмену функции автопарковки, если бы даже режим движения случайно устанавливался в нейтральный режим в ответ на действие переключения, выполняемое в соответствии с шаблоном действия, указанным в качестве кода дешифрования.
Кроме того, методика, раскрываемая в документе JP 2010-190311 A, разработана для решения проблемы, которая состоит в том, что функция автопарковки отрицательно влияет на работу на производственной линии, и шаблон действия, указанный в качестве кода дешифрования, выполнен в виде комбинации действий, которая не выполняется во время обычного движения. В качестве варианта осуществления, описываемого в документе JP 2010-190311 A, в качестве «шаблона действия, указанного в качестве кода дешифрования» используется шаблон действия, при котором кнопочный переключатель нажимается пороговое количество раз Nth (например, три раза) или более в период после того, как рычаг переключения удерживается в положении N-диапазона и до тех пор, пока не истекает пороговое время Tth (например, 15 секунд). Другими словами, действие переключения, выполняемое в соответствии с шаблоном переключения, который указан в качестве кода дешифрования, не может быть легко выполнено водителем, который, волнуясь, желает и пытается изменить режим движения на нейтральный режим.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Раскрываемый здесь предмет изобретения может предоставлять устройство переключения, в котором повышается возможность того, что режим движения может быть быстро установлен в нейтральный режим в ответ на действие, выполняемое волнующимся водителем.
Устройство переключения может содержать: рычаг переключения, который смонтирован на транспортном средстве и который выполнен с возможностью автоматического возврата в опорное положение из нейтрального положения; блок обнаружения положения, который выполнен с возможностью обнаружения того, что рычаг переключения помещен в нейтральное положение; и блок установки, который выполнен с возможностью установки транспортного средства в нейтральное состояние, когда рычаг переключения удерживается в нейтральном положении в течение определенного времени или более; установки транспортного средства в нейтральное состояние, когда рычаг переключения помещается в нейтральное положение несколько раз в течение предварительно определенного времени.
Опорное положение и нейтральное положения могут быть расположены на одной линии, и блок установки может быть выполнен с возможностью установки транспортного средства в нейтральное состояние, когда количество раз, которое рычаг переключения перемещается из опорного положения в нейтральное положения, составляет несколько раз или более в течение предварительно определенного времени.
Блок установки может быть выполнен с возможностью отмены количества раз, которое рычаг переключения перемещался из опорного положения в нейтральное положение, когда рычаг переключения перемещается из опорного положения в положение, отличное от нейтрального положения.
Определенное время может быть измерено таймером удержания.
Предварительно определенное время может быть измерено таймером ожидания.
Блок установки может подсчитывать количество раз, которое рычаг переключения перемещается из опорного положения в нейтральное положение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - вид, показывающий конфигурацию автомобиля в соответствии с вариантом осуществления;
Фиг. 2 - вид в перспективе, показывающий зону вокруг места монтажа рычага-джойстика внутри салона автомобиля, показанного на Фиг. 1;
Фиг. 3 - структурная схема PHEV-ECU с Фиг. 1; и
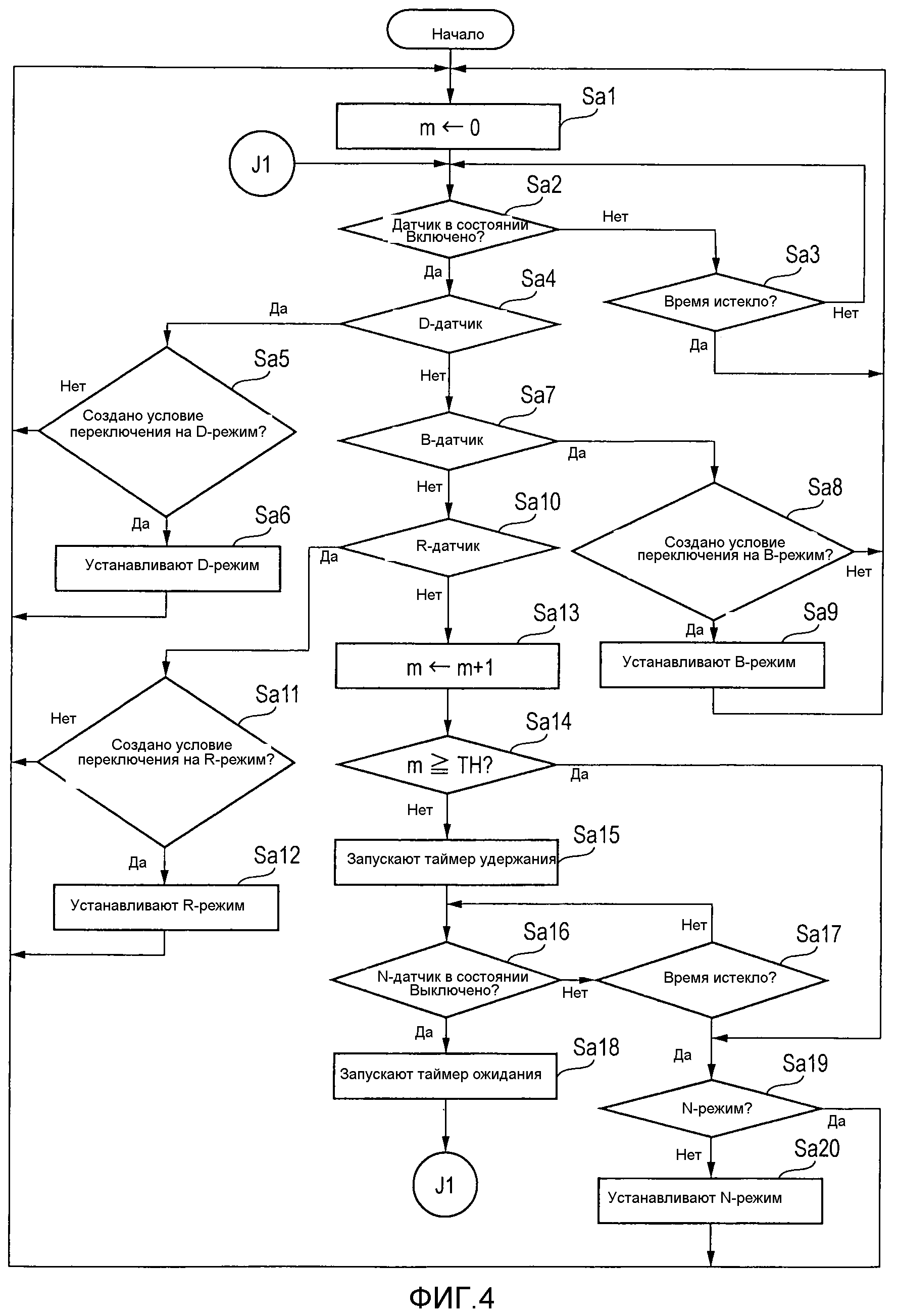
Фиг. 4 - блок-схема процесса установки режима движения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на Фиг. 1-4 будет описан автомобиль, предусмотренный с устройством переключения в соответствии с вариантом осуществления настоящего изобретения. Несмотря на то что в данном варианте осуществления в качестве примера приводится гибридный автомобиль с подзарядкой от сети, настоящее изобретение может быть аналогичным образом воплощено в других различных типах автомобилей.
Фиг. 1 является видом, показывающим конфигурацию автомобиля 100. Несмотря на то что автомобиль 100 оборудован многочисленными компонентами, аналогичными тем, что присутствуют в других существующих гибридных автомобилей с подзарядкой от сети, на Фиг. 1 показаны только некоторые компоненты.
Автомобиль 100 включает в себя: основную часть 1, передние колеса 2a и 2b, задние колеса 3a и 3b, полуоси 4a, 4b, 5a и 5b, механизмы 6 и 7 трансмиссии, двигатель 8 внутреннего сгорания, электромоторы 9 и 10, генератор 11, аккумулятор 12, инверторы 13, 14 и 15, замыкатели 16a, 16b, 16c, 17a, 17b и 17c, разъем 18 внешней подачи питания, устройство 19 зарядки, датчик 20 нейтрального положения (ниже именуемый как N-датчик), датчик положения езды (ниже именуемый как D-датчик), датчик 22 положения торможения (ниже именуемый как B-датчик), датчик 23 положения заднего хода (ниже именуемый как R-датчик), выключатель 24 питания, датчик 25 скорости автомобиля, электрический блок 26 управления запуска в одно касание (OSS-ECU), электрический блок 27 управления электрической системой управления временем и сигнализацией (ETACS-ECU), электрический блок 28 управления (ECU) двигателя и электрический блок 29 управления гибридным электрическим транспортным средством с подзарядкой от сети (PHEV-ECU).
Кроме того, автомобиль 100 включает в себя такой рычаг 30 переключения типа джойстик (ниже именуемый как рычаг-джойстик), как показанный, например, на Фиг. 2.
Фиг. 2 является видом в перспективе, показывающим зону вокруг места монтажа рычага-джойстика 30 внутри салона автомобиля 100.
Рычаг-джойстик 30 расположен в состоянии, при котором он ходит в направляющем пазу 31a, сформированном в направляющей панели 31. В дополнение, опора рычага-джойстика 30 обеспечивается посредством известного опорного механизма, не показан, таким образом, что обеспечивается возможность перемещения рычага-джойстика по направляющему пазу 31a.
Направляющий паз 31a позволяет помещать рычаг-джойстик 30 в каждое из положений: исходное положение HP (опорное положение), нейтральное положение NP, положение DP езды, положение BP торможения и положение RP заднего хода. Вышеупомянутый опорный механизм возвращает рычаг-джойстик 30 в исходное HP положение в ситуации, при которой внешняя сила, такая как воздействующая сила, прикладываемая водителем, не применяется к рычагу-джойстику 30.
Основная часть 1 включает в себя шасси, кузов транспортного средства, и т.д. и является опорой для других компонентов. В основной части 1 сформировано пространство для размещения пассажиров, включая водителя.
Передние колеса 2a и 2b прикреплены к оконечным частям полуосей 4a и 4b соответственно. Задние колеса 3a и 3b прикреплены к оконечным частям полуосей 5a и 5b соответственно. Передние колеса 2a и 2b и задние колеса 3a и 3b соответственно контактируют с землей для обеспечения опоры для основной части 1 и вращаются для перемещения основной части 1.
Полуоси 4a и 4b обеспечивают относительное взаимное расположение основной части 1 и передних колес 2a и 2b в предварительно определенном состоянии и передают вращающую силу, передаваемую от механизма 6 трансмиссии, к передним колесам 2a и 2b.
Полуоси 5a и 5b обеспечивают относительное взаимное расположение основной части 1 и задних колес 3a и 3b в предварительно определенном состоянии и передают вращающую силу, передаваемую от механизма 7 трансмиссии, к задним колесам 3a и 3b.
Механизм 6 трансмиссии обеспечивает опору с возможностью вращения полуосям 4a и 4b по отдельности. Соответствующие валы 8a, 9a и 11a вращения двигателя 8 внутреннего сгорания, электромотора 9 и генератора 11 по отдельности соединены с механизмом 6 трансмиссии. Механизм 6 трансмиссии выполнен посредством объединения различного вида шестерен, включая шестерню дифференциала, валы и сцепления, как известно в соответствующей области техники, и формирует с возможностью выбора: состояние, при котором вал 8a вращения соединен с полуосями 4a и 4b; состояние, при котором вал 8a вращения соединен с валом 11a вращения; состояние, при котором вращающая сила вала 8a вращения распределяется и передается полуосям 4a и 4b и валу 11a вращения; состояние, при котором вал 9a вращения соединен с полуосями 4a и 4b; состояние, при котором вал 11a вращения соединен с полуосями 4a и 4b; состояние, при котором полуоси 4a и 4b вращаются свободно; или состояние, при котором полуоси 4a и 4b заблокированы. Блокировка полуосей 4a и 4b выполняется, например, посредством механической блокировки вращения валов, предусмотренных для механизма 6 трансмиссии, используя механизм блокировщика коробки передач на стоянке, предусмотренного для механизма 6 трансмиссии.
Механизм 7 трансмиссии обеспечивает опору с возможностью вращения полуосям 5a и 5b по отдельности. Вал 10a вращения электромотора 10 соединен с механизмом 7 трансмиссии. Механизм 7 трансмиссии выполнен посредством объединения различного вида шестерен, включая шестерню дифференциала, валы и сцепление, как известно в соответствующей области техники, и формирует с возможностью выбора: состояние, при котором вал 10a вращения соединен с полуосями 5a и 5b; и состояние, при котором полуоси 5a и 5b вращаются свободно.
Двигатель 8 внутреннего сгорания использует топливо для формирования вращающей силы и вращает вал 8a вращения. Двигатель 8 внутреннего сгорания, как правило, использует бензин в качестве топлива, однако может использовать топливо, отличное от бензина, такое как легкое масло, или газ, такой как LPG (сжиженный нефтяной газ). Когда вал 8a вращения соединен с полуосями 4a и 4b через механизм 6 трансмиссии, то двигатель 8 внутреннего сгорания вращает передние колеса 2a и 2b.
Электромоторы 9 и 10 используют электрическую энергию для формирования вращающих сил и вращения валов 9a и 10a вращения. Когда вал 9a вращения соединен с полуосями 4a и 4b через механизм 6 трансмиссии, то электромотор 9 вращает передние колеса 2a и 2b. Когда вал 10a вращения соединен с полуосями 5a и 5b через механизм 7 трансмиссии, то электромотор 10 вращает задние колеса 3a и 3b.
Генератор 11 использует вращение вала 11a вращения для формирования электричества посредством электромагнитной индукции. Когда вал 8a вращения соединен с валом 11a вращения через механизм 6 трансмиссии, то генератор 11 использует вращающую силу, формируемую двигателем 8 внутреннего сгорания, для формирования электричества. Когда полуоси 4a и 4b соединены с генератором 11 через механизм 6 трансмиссии, то генератор 11 использует вращающие силы полуосей 4a и 4b для формирования электричества.
Аккумулятор 12 генерирует постоянный ток.
Каждый из инверторов 13 и 14 преобразует постоянный ток, выдаваемый аккумулятором 12, в переменный ток. Инверторы 13 и 14 могут обладать известной конфигурацией с переключающими устройствами, такими как биполярный транзистор с изолированным затвором (IGBT). Инвертор 13 направляет переменный ток к электромотору 9, чтобы подать электрическую энергию на электромотор 9. Инвертор 14 подает переменный ток на электромотор 9, для приведение в действие электромотора 10. Инверторы 13 и 14 меняют частоту переключения устройств переключения и значения тока (значения выходного тока) и частоты (выходные частоты) токов, которые будут выведены, под управлением PHEV-ECU 29.
Инвертор 15 преобразует переменный ток, сформированный генератором 11, в постоянный ток. Постоянный ток, полученный посредством инвертора 15, подается на аккумулятор 12.
Замыкатели 16a, 16b и 16с вставлены между положительной клеммой аккумулятора 12 и инверторами 13, 14 и 15 соответственно. Замыкатели 16a, 16b и 16c используются для включения/выключения электрических соединений между положительной клеммой аккумулятора 12 и инверторами 13, 14 и 15, соответственно, под управлением PHEV-ECU 29.
Замыкатели 17a, 17b и 17c вставлены между отрицательной клеммой аккумулятора 12 и инверторами 13, 14 и 15 соответственно. Замыкатели 17a, 17b и 17c используются для включения/выключения электрических соединений между отрицательной клеммой аккумулятора 12 и инверторами 13, 14 и 15, соответственно, под управлением PHEV-ECU 29.
Кабель для приема электрической энергии от внешнего источника питания может быть соединен с разъемом 18 внешней подачи питания при необходимости. Когда кабель соединен с разъемом 18 внешней подачи питания, кабель электрически соединяется с устройством 19 зарядки.
Устройство 19 зарядки заряжает аккумулятор 12, используя электрическую энергию, подаваемую от внешнего источника питания через кабель, соединенный с разъемом 18 внешней подачи питания.
N-датчик 20 обнаруживает, помещен ли рычаг-джойстик 30 в нейтральное NP положение или в положение, отличное от нейтрального NP положения, и выдает сигнал обнаружения, указывающий результат обнаружения.
D-датчик 21 обнаруживает, помещен ли рычаг-джойстик 30 в положение DP езды или положение, отличное от положения DP езды, и выдает сигнал обнаружения, указывающий результат обнаружения.
N-датчик 22 обнаруживает, помещен ли рычаг-джойстик 30 в положение BP торможения или в положение, отличное от положения BP торможения, и выдает сигнал обнаружения, указывающий результат обнаружения.
R-датчик 23 обнаруживает, помещен ли рычаг-джойстик 30 в положение RP заднего хода или в положение, отличное от положения RP заднего хода, и выдает сигнал обнаружения, указывающий результат обнаружения.
H-датчик может быть предусмотрен отдельно для обнаружения того, помещен ли рычаг-джойстик 30 в исходное положение HP или в положение, отличное от исходного положения HP, и для вывода сигнала обнаружения, указывающего результат обнаружения.
Выключатель 24 питания является выключателем, который управляется пользователем, для выдачи инструкций на запуск и остановку автомобиля 100.
Датчик 25 скорости транспортного средства определяет скорость движения автомобиля 100 на основании скорости вращения полуоси 5b, например.
Когда пользователь приводит в действие выключатель 24 питания, OSS-ECU 26 осуществляет связь для аутентификации и затем управляет источниками питания соответствующих секций, например.
ETACS-ECU 27 управляет различными электрическими компонентами, смонтированными на автомобиле 100, но не показанными на Фиг. 1. Электрические компоненты, которыми управляет ETACS-ECU 27, являются: фары, наружные зеркала заднего вида, стеклоочистители, механизм запирания дверей, приборы внутрисалонного освещения и противоугонная сигнализация, например. При осуществлении связи с OSS-ECU 26 и ECU 28 двигателя и PHEV-ECU 29, при необходимости, и получении требуемой информации, ETACS-ECU 27 управляет различными электрическими компонентами для выполнения предварительно определенных действий. В качестве одного примера управления, если наружные зеркала заднего вида находятся в убранном состоянии, то, когда скорость транспортного средства становится равной указанному значению или выше, ETACS-ECU 27 автоматически раскрывает наружные зеркала заднего вида.
ECU 28 двигателя управляет работой двигателя 8 внутреннего сгорания. При осуществлении связи с ETACS-ECU 27 и PHEV-ECU 29 при необходимости ECU 28 двигателя получает информацию, требуемую для различных процессов управления.
PHEV-ECU 29 выполняет различные процессы управления, которые относятся к движению автомобиля 100. Например, PHEV-ECU 29 управляет состоянием механизмов 6 и 7 трансмиссии, в зависимости от состояния движения автомобиля 100. Кроме того, PHEV-ECU 29 управляет состояниями инвертеров 13 и 14 и замыкателями 16a, 16b, 16c, 17a, 17b и 17c. В качестве одного примера управления, в состоянии действия подачи питания режима EV (электрического транспортного средства) автомобиля, PHEV-ECU 29 устанавливает механизм 6 трансмиссии в состояние, при котором вал 9a вращения электромотора 9 соединен с полуосями 4a и 4b, устанавливает механизм 7 трансмиссии в состояние, при котором вал 10a вращения электромотора 10 соединен с полуосями 5a и 5b, и включает все замыкатели 16a, 16b, 16c, 17a, 17b и 17c. В рабочем состоянии, PHEV-ECU 29 вычисляет требуемую выходную мощность движения в зависимости от открытия акселератора, которое обнаруживается датчиком открытия акселератора, не показан, и управляет выходами инверторов 13 и 14 таким образом, чтобы приводить в движение электромоторы 9 и 10 для получения выходной мощности движения. В дополнение, PHEV-ECU 29 управляет состояниями механизмов 6 и 7 трансмиссии, инверторами 13 и 14 и замыкателями 16a, 16b, 16c, 17a, 17b и 17c таким образом, что различные рабочие состояния, выполняемые другими существующими гибридными транспортными средствами, могут быть сформированы при необходимости. При осуществлении связи с ETACS-ECU 27 и ECU 28 двигателя при необходимости PHEV-ECU 29 получает требуемую информацию для различных процессов управления.
В качестве основных режимов движения автомобиля 100 под управлением PHEV-ECU 29, с возможностью выбора применяются нейтральный режим, режим езды, режим торможения и режим заднего хода. В нейтральном режиме, приводная мощность не передается к полуосям 4a, 4b, 5a и 5b и не применяется торможение. В режиме езды мощность передается, по меньшей мере, к одной из полуосей 4a, 4b, 5a и 5b для перемещения вперед автомобиля 100. В режиме торможения, сопротивление вращению двигателя 8 внутреннего сгорания или электромоторов 9 и 10 прилагается в качестве сопротивления движению автомобиля 100. В режиме заднего хода, приводная мощность передается, по меньшей мере, к одной из полуосей 4a, 4b, 5a и 5b для перемещения автомобиля 100 в обратном направлении.
Фиг. 3 является структурной схемой PHEV-ECU 29. На Фиг. 3, компоненты, которые являются одинаковыми с компонентами, показанными на Фиг. 1, обозначены одинаковыми ссылочными кодами.
PHEV-ECU 29 включает в себя центральный блок 29a обработки (ЦБО), постоянное запоминающее устройство 29b (ПЗУ), оперативное запоминающее устройство 29c (ОЗУ), электрически стираемое программируемое постоянное запоминающее устройство 29d (ЭСППЗУ), блок 29e интерфейса (блок I/F) и блок 29f связи. Эти компоненты соответственно соединены с шиной 29g.
На основании операционной системы и прикладных программ, хранящихся в ПЗУ 29b и ОЗУ 29c, ЦБО 29a выполняет обработку информации для управления действиями соответствующих компонентов, управление которыми осуществляется PHEV-ECU 29.
ПЗУ 29b хранит вышеупомянутую операционную систему. ПЗУ 29b может хранить вышеупомянутые прикладные программы. Кроме того, ПЗУ 29b может хранить данные, к которым может осуществлять обращение, при выполнении ЦБО 29a различных процессов.
ОЗУ 29с используется в качестве так называемой рабочей зоны для хранения данных, которые будут использоваться временно, при выполнении ЦБО 29a различных процессов.
ЭСППЗУ 29d хранит данные, которые будут использоваться, при выполнении ЦБО 29a различных процессов, а также хранит данные, созданные обработкой ЦБО 29a. Кроме того, ЭСППЗУ 29d может хранить прикладные программы.
Прикладные программы, хранящиеся в ПЗУ 29b или ЭСППЗУ 29d, включают в себя программу установки режима движения, написанную в отношении описываемого позже процесса установки режима движения. В случае, когда программа установки режима движения хранится в ЭСППЗУ 29d, то перенос PHEV-ECU 29, блока, включающего в себя PHEV-ECU 29, или автомобиля 100, как правило, выполняется в состоянии, при котором вышеупомянутая программа установки режима движения хранится в ЭСППЗУ 29d. Тем не менее, PHEV-ECU 29, блок, включающий в себя PHEV-ECU 29, или автомобиль 100 могут быть перенесены в состоянии, при котором вышеупомянутая программа установки режима движения не хранится в ЭСППЗУ 29d, и программа установки режима движения может быть записана на съемный носитель для записи данных, такой как магнитный диск, магнитооптический диск, оптический диск или полупроводниковая память, и перенесен, или программа установки режима движения может быть перенесена через сеть, и программа установки режима движения может быть записана в PHEV-ECU 29, блок, включающий в себя PHEV-ECU 29 или ЭСППЗУ 29b автомобиля 100, будучи перенесенной отдельно, как описано выше.
Блок 29e интерфейса используется для физического соединения соответствующих компонентов, управление которыми должно выполняться посредством PHEV-ECU 29. Другими словами, к блоку 29e подсоединены аккумулятор 12, инверторы 13 и 14, замыкатели 16a, 16b, 16c, 17a, 17b и 17c, N-датчик 20, D-датчик 21, B-датчик 22, R-датчик 23 и датчик 25 скорости транспортного средства. Блок 29e интерфейса используется для координации передачи и приема данных между соответствующими соединенными компонентами и ЦБО 29a. Другими словами, блока 29e интерфейса имеет функцию, при которой он выступает в роли блока для приема сигнала обнаружения, выдаваемого N-датчиком 20.
Блок 29f связи осуществляет связь с OSS-ECU 26, ETACS-ECU 27 и ECU 28 двигателя.
Как описано выше, блок 29e интерфейса имеет функцию, при которой он выступает в роли блока для приема сигнала обнаружения. Кроме того, ЦБО 29a функционирует, выступая в роли блока установки посредством исполнения процесса установки режима движения, описываемого позже.
Далее, ниже будет описано функционирование автомобиля 100, выполненного в соответствии с тем, что описано выше. Несмотря на то что автомобиль 100 имеет различные функции, аналогичные тем, что имеются у других существующих автомобилей, то поскольку действия, которые относятся к функциям, аналогичны тем, что имеются у других существующих автомобилей, их подробные описания опущены. В нижеследующих описаниях подробно будет описана установка режима движения.
Фиг. 4 является блок-схемой процесса установки режима движения.
Когда запускается PHEV-ECU 29, например, посредством управления источниками питания соответствующих секций, исполняемых OSS-ECU 26 в ответ на приведение в действие выключателя 24 питания, то ЦБО 29a начинает процесс установки режима движения, показанный на Фиг. 4 в соответствии с программой установки режима движения. Содержимое описываемого ниже процесса является одним примером, и должным образом могут быть использованы различные процессы, выполненные с возможностью получения аналогичных результатов.
На этапе Sa1, ЦБО 29a сбрасывает переменную m на 0. Переменная m используется для подсчета количества раз, которое рычаг-джойстик 30 последовательно перемещен в нейтрально положение NP.
На этапе Sa2, ЦБО 29a проверяет, обнаружил ли вновь любой из датчиков: N-датчик 20, D-датчик 21, B-датчик 22 и R-датчик 23, рычаг-джойстик 30. В нижеследующих описаниях, что касается состояний N-датчика 20, D-датчика 21, B-датчика 22 и R-датчика 23, то состояние, при котором рычаг-джойстик 30 был обнаружен, именуется как Включено, а состояние отсутствия обнаружения именуется как Выключено.
Когда рычаг-джойстик 30 приводится в действие водителем и перемещается в любое одно из положений: нейтральное положение NP, положение DP езды, положение BP торможения и положение RP заднего хода, то датчик, соответствующий положению, меняет состояние своего сигнала обнаружения. ЦБО 29a принимает сигналы обнаружения, соответственно выдаваемые от N-датчика 20, D-датчика 21, B-датчика 22 и R-датчика 23, через блок 29e интерфейса и отслеживает состояния сигналов. Если оценкой на этапе Sa2 является НЕТ, так как ни один из датчиков: N-датчик 20, D-датчик 21, B-датчик 22 и R-датчик 23 не был вновь приведен в состояние Включено, то управление ЦБО 29a переходит к этапу Sa3.
На этапе Sa3, ЦБО 29a проверяет, истек ли таймер ожидания. Таймер ожидания будет описан позже. Если оценкой является Нет, так как таймер ожидания не истек, управление ЦБО 29a переходит к этапу Sa2. Существует случай, при котором таймер ожидания не запускается. В данном случае ЦБО 29a оценивает условие как Нет.
Следовательно, ЦБО 29a ожидает на этапах Sa2 и Sa3 до тех пор, пока не будет вновь приведен в состояние Включено любой из датчиков: N-датчик 20, D-датчик 21, B-датчик 22 и R-датчик 23, или до тех пор, пока не истечет таймер ожидания.
Если оценкой на этапе Sa2 является Да, так как любой один из датчиков: N-датчик 20, D-датчик 21, B-датчик 22 и R-датчик 23, был вновь приведен в состояние Включено, то управление ЦБО 29a переходит к этапу Sa4.
На этапе Sa4, ЦБО 29a проверяет, является ли датчиком, который был вновь приведен в состояние Включено, D-датчик 21. Если оценкой является Да, то управление ЦБО 29a переходит к этапу Sa5.
На этапе Sa5, ЦБО 29a проверяет, было ли создано предварительно определенное условие (условие переключения на D-режим), которое должно быть удовлетворено для переключения на режим езды. Условие переключения в D-режим может быть определено, например, по желанию разработчика автомобиля 100. Если оценкой является Да, так как условие переключения на D-режим было создано, управление ЦБО 29a переходит к этапу Sa6.
На Этапе Sa6, ЦБО 29a устанавливает режим езды в качестве режима движения.
Затем, управление ЦБО 29a переходит обратно к этапу Sa1. Если оценкой на этапе Sa5 является Нет, так как не было создано условия переключения на D-режим, то управление ЦБО 29a переходит назад к этапу Sa1, без перехода к этапу Sa6.
Если оценкой на этапе Sa4 является Нет, так как датчиком, который оценен как вновь приведенный в состояние Включено на этапе Sa2, не является D-датчик 21, управление ЦБО 29a переходит к этапу Sa7.
На этапе Sa7, ЦБО 29a проверяет, является ли датчиком, который был вновь приведен в состояние Включено, B-датчик 22. Если оценкой является Да, то управление ЦБО 29a переходит к этапу Sa8.
На этапе Sa8, ЦБО 29a проверяет, было ли создано предварительно определенное условие (условие переключения на B-режим), которое должно быть удовлетворено для переключения на режим торможения. Условие переключения в B-режим может быть определено, например, по желанию разработчика автомобиля 100. Если оценкой является Да, так как условие переключения на B-режим было создано, управление ЦБО 29a переходит к этапу Sa9.
На Этапе Sa9, ЦБО 29a устанавливает режим торможения в качестве режима движения.
Затем, управление ЦБО 29a переходит обратно к этапу Sa1. Если оценкой на этапе Sa8 является Нет, так как не было создано условия переключения в B-режим, то управление ЦБО 29a переходит назад к этапу Sa1, без перехода к этапу Sa9.
Если оценкой на этапе Sa7 является Нет, так как датчиком, который оценен как вновь приведенный в состояние Включено на этапе Sa2, не является B-датчик 22, управление ЦБО 29a переходит к этапу Sa10.
На этапе Sa10, ЦБО 29a проверяет, является ли датчиком, который был вновь приведен в состояние Включено, R-датчик 23. Если оценкой является Да, то управление ЦБО 29a переходит к этапу Sa11.
На этапе Sa11, ЦБО 29a проверяет, было ли создано предварительно определенное условие (условие переключения на R-режим), которое должно быть удовлетворено для переключения на режим заднего хода. Условие переключения в R-режим может быть определено, например, по желанию разработчика автомобиля 100. Если оценкой является Да, так как условие переключения на R-режим было создано, управление ЦБО 29a переходит к этапу Sa12.
На Этапе Sa12, ЦБО 29a устанавливает режим заднего хода в качестве режима движения.
Затем, управление ЦБО 29a переходит обратно к этапу Sa1. Если оценкой на этапе Sa11 является Нет, так как не было создано условия переключения в R-режим, то управление ЦБО 29a переходит назад к этапу Sa1, без перехода к этапу Sa12.
Если оценкой на этапе Sa10 является Нет, так как датчиком, который оценен как вновь приведенный в состояние Включено на этапе Sa2, не является R-датчик 22, управление ЦБО 29a переходит к этапу Sa13. Другими словами, если датчиком, который был оценен как вновь приведенный в состояние Включено на этапе Sa2, является N-датчик 20, то управление ЦБО 29a переходит к этапу Sa13.
На этапе Sa13, ЦБО 29a увеличивает переменную m на единицу. Другими словами, переменная m увеличивается на единицу всякий раз, когда N-датчик 20 вновь приводится в состояние Включено.
На этапе Sa14, ЦБО 29a проверяет, достигла ли переменная m предварительно определенного порогового значения TH или больше. Пороговое значение TH может быть определено в качестве значения, равного 2 или более, по желанию, например, разработчика автомобиля 100. В качестве одного примера, предполагается, что пороговым значением является «3». Если оценкой является Нет, так как переменная m меньше порогового значения, то управление ЦБО 29a переходит к этапу Sa15.
На этапе Sa15, ЦБО 29a запускает таймер удержания. Таймер удержания используется для измерения предварительно определенного необходимого времени удержания. Необходимое время удержания может быть определено по желанию, например, разработчика автомобиля 100. В качестве одного примера, предполагается, что необходимое время удержания составляет одну секунду. Тем не менее, таймер удержания может быть реализован в качестве программного таймера посредством использования процесса задачи отличного от процесса установки режима движения, выполняемого ЦБО 29a. Кроме того, в качестве таймера удержания также может быть использован программный таймер или аппаратный таймер, управляемый процессором, отличным от ЦБО 29a.
На этапе Sa16, ЦБО 29a проверяет, был ли N-датчик 20 приведен в состояние Выключено. Если оценкой является Нет, так как N-датчик 20 остается в состоянии Включено, управление ЦБО 29a переходит к этапу Sa17.
На этапе Sa17, ЦБО 29a проверяет, истек ли таймер удержания. Если оценкой является Нет, так как таймер удержания не истек, то управление ЦБО 29a переходит назад к этапу Sa16.
Следовательно, ЦБО 29a ожидает на этапах Sa16 и Sa17 до тех пор, пока N-датчик 20 не будет приведен в состояние Выключено, или до тех пор, пока не истечет таймер удержания.
Если оценкой является Да на этапе Sa16, так как N-датчик был приведен в состояние Выключено до того как истек таймер удержания, то управление ЦБО 29a переходит к этапу Sa18.
На этапе Sa18, ЦБО 29a запускает таймер ожидания. В случае, когда действие приведения в состояние Включено N-датчика 20 вновь выполняется непрерывно, таймер ожидания используется для измерения времени ожидания, которое служит в качестве времени, допустимого для интервала между действиями. Время ожидания может быть определено по желанию, например, разработчика автомобиля 100. В качестве одного примера, предполагается, что время ожидания составляет 0,5 секунды. Тем не менее, таймер ожидания может быть реализован в качестве программного таймера посредством использования процесса задачи, отличного от процесса установки режима движения, выполняемого ЦБО 29a. Кроме того, в качестве таймера ожидания также может быть использован программный таймер или аппаратный таймер, управляемый процессором отличным от ЦБО 29a.
Затем, управление ЦБО 29a возвращается к этапам Sa2 и Sa3, на которых ЦБО 29a находится в состоянии ожидания. Следовательно, в состоянии ожидания на этапах Sa2 и Sa3, ЦБО 29a проверяет, является ли N-датчик 20 вновь приведенным в состояние Включено в период после того, как N-датчик 20 был приведен в состояние Выключено однажды, и до того, как не истекло время ожидания. Если оценкой на этапе Sa3 является Да, так как таймер ожидания истек до того, как N-датчик 20 вновь приведен в состояние Включено, то управление ЦБО 29a возвращается к этапу Sa1. Другими словами, в данном случае, переменная m сбрасывается и вышеупомянутый процесс повторяется.
Если N-датчик 20 был вновь приведен в состояние Включено в период после того, как N-датчик 20 был приведен в состояние Выключено однажды, и до того, как истекло время ожидания, то ЦБО 29a увеличивает переменную m на единицу на этапе Sa13, не сбрасывая переменную m. Как описано выше, в случае, когда любой один из датчиков: D-датчик 21, B-датчик 22 и R-датчик 23, были приведены в состояние Включено, то управление ЦБО 29a возвращается из любого одного из этапов Sa5, Sa6, Sa9, Sa11 и Sa12 к этапу Sa1, и ЦБО 29a сбрасывает переменную m на 0. В результате, переменная m используется для представления количества раз, которое N-датчик 20 приводится в состояние Включено в течение интервала, не превышающего время ожидания, и в состоянии, при котором ни один из датчиков: D-датчик 21, B-датчик 22 и R-датчик 23, не приводится в состояние Включено, а N-датчик 20 приводится в состояние Включено/Выключено неоднократно в середине интервала.
Если оценкой на этапе Sa14 является Да, так как переменная m достигла порогового значения TH или стала больше, то управление ЦБО 29a переходит к этапу Sa19. Кроме того, в состоянии ожидания на этапах Sa16 и Sa17, если оценкой на этапе Sa17 является Да, так как таймер удержания истек до того, как N-датчик 20 приведен в состояние Выключено, то управление ЦБО 29a переходит к этапу Sa19.
Другими словами, в состоянии, при котором N-датчик 20 приводится в состояние Включено/Выключено неоднократно в течение интервала, не превышающего время ожидания, количество раз, которое действия приведения в состояние Включено N-датчика 20, достигло указанного значения, соответствующего пороговому значению TH, или большего значения, или N-датчик непрерывно находится в состоянии Включено в течение периода, превышающего необходимое время удержания, то управление ЦБО 29a переходит к этапу Sa19.
На этапе Sa19, ЦБО 29a проверяет, был ли установлен текущий режим движения в нейтральный режим. Если на данном этапе оценкой является Нет, то управление ЦБО 29a переходит к этапу Sa20.
На этапе Sa20, ЦБО 29a устанавливает нейтральный режим в качестве режима движения.
Затем, управление ЦБО 29a возвращается к этапу Sa1. Если оценкой на этапе Sa19 является Да, так как нейтральный режим уже был установлен в качестве режима движения, то управление ЦБО 29a возвращается в этапу Sa1 не переходя в этапу Sa20.
Как описано выше, в автомобиле 100, в состоянии, при котором режим движения был установлен в режим, отличный от нейтрального режима, если водитель приводит в действие рычаг-джойстик 30 таким образом, что состояние, при котором рычаг-джойстик 30, помещенный в нейтральное положение NP, сохраняется в течение периода, превышающего необходимое время удержания, то режим движения меняется на нейтральный режим.
Если к рычагу-джойстику 30 не прикладывается никакой силы со стороны водителя, то рычаг возвращается в исходное положение HP. Следовательно, в случае, когда водитель, желающий изменить режим движения на нейтральный режим, прикладывает силу и перемещает рычаг-джойстик 30 в нейтральное положение NP один раз, но уменьшает силу во время волнения, до того как истекает необходимое время удержания, то со временем рычаг-джойстик 30 возвращается в исходное положение HP, и режим движения не переключается на нейтральный режим. Волнующийся водитель в данном виде ситуации имеет тенденцию повторить действие, аналогичное тому, что описано выше. Другими словами, в данном виде ситуации, управление рычагом-джойстиком 30 выполняется таким образом, что он совершает быстрое возвратно-поступательное движение между исходным положением HP и нейтральным положением NP.
В данном случае, состояние, при котором рычаг-джойстик 30 помещается в нейтральное положение NP, не сохраняется в течение периода, превышающего необходимое время удержания, но режим движения меняется на нейтральный режим. Следовательно, с помощью автомобиля 100 можно повысить возможность того, что режим движения может быть быстро установлен в нейтральный режим в ответ на действие, выполняемое волнующимся водителем.
Тем не менее, в случае, когда N-датчик 20 приводится в состояние Включено часто до такой степени, что N-датчик 20 приводится в состояние включено свыше указанного количества раз в то время, как интервал действий приведения в состояние Включено N-датчика 20 не превышает времени ожидания (предварительно определенного времени), то режим движения устанавливается в нейтральный режим. По этой причине в случае, когда вышеупомянутое действие выполняется с частотой ниже указанной частоты, режим движения не устанавливается в нейтральный режим в ответ на действие, тем самым режим движения без надобности не устанавливается в нейтральный режим.
Кроме того, рычаг-джойстик 30 автоматически возвращается в исходное положение HP, и исходное положение HP и нейтральное положение NP находятся на одной линии. Следовательно, в чрезвычайной ситуации при вождении вероятно, что водитель перемещает рычаг-джойстик 30 линейно и быстро несколько раз между нейтральным положением NP и исходным положением HP, пытаясь при этом переключить рычаг-джойстик 30 в нейтральное положение HP. Даже в данном виде ситуации режим движения транспортного средства может быть безопасно установлен в нейтральный режим.
Более того, когда рычаг-джойстик 30 помещается в положение, отличное от нейтрального положения NP, например положение DP езды, в то время как водитель перемещает рычаг-джойстик 30 между исходным положением HP и нейтральным положением NP, то намерение водителя, пытающегося переключить рычаг-джойстик 30 в положение, отличное от нейтрального положения NP, может быть отражено посредством сброса (отмены) количества раз, которое рычаг-джойстик 30 помещался в нейтральное положение NP.
Данный вариант осуществления может быть по-разному модифицирован, как описано ниже.
Время ожидания, измеряемое таймером ожидания, может меняться динамически в зависимости от значения переменной m. В частности, например, в случае, когда водитель перемещает рычаг-джойстик 30 неоднократно в нейтральное положение NP, то скорость перемещения, вероятно, имеет тенденцию к тому, чтобы постепенно становиться медленнее. Следовательно, модификация, при которой время ожидания делается длиннее, по мере увеличения значения переменной m может быть использована применительно к вышеупомянутой тенденции.
Процесс оценки того, превышает ли частота, с которой N-датчик 20 вновь приводится в состояние Включено, указанную частоту, может быть по-разному модифицирован, например, как в случае процесса для проверки того, достигло ли количество раз, которое N-датчик 20 вновь приводится в состояние Включено, указанного количество раз в период до тех пор, пока не истекло определенное время.
Несмотря на то что переменная m сбрасывается на 0 в случае, когда любой один из датчиков: D-датчик 21, B-датчик 22 и R-датчик 23, был приведен в состояние Включено, может не потребоваться выполнения данного сброса. Другими словами, даже если рычаг-джойстик 30 перемещается в положение DP езды, положение BP торможения или положение RP заднего хода в середине действия переключения, если частота, с которой N-датчик 20 вновь приводится в состояние Включено, превышает указанную частоту, то режим движения может быть установлен в нейтральный режим. При данной конфигурации, например, в случае, когда водитель переместил рычаг-джойстик 30 в положение DP езды или положение RP заднего хода из-за чрезмерного импульса, то переменная m не возвращается в исходное состояние, тем самым может быть разрешено выполнение такого действия и рычаг-джойстик 30 может быть быстро перемещен в нейтральный режим. Тем не менее, в случае, когда вышеупомянутая модификация выполняется, когда соответствующие положения рычага-джойстика 30 расположены так, как показано на Фиг. 2, то пороговое значение TH должно быть установлено равным 3 или более.
Несмотря на то что PHEV-ECU 29 имеет функции управления применительно к устройству переключения в соответствии с вышеупомянутым вариантом осуществления настоящего изобретения, функциями управления может обладать ECU, отличный от PHEV-ECU.
Настоящее изобретение не ограничивается конкретной конфигурацией вышеупомянутого варианта осуществления, и его компоненты могут модифицироваться и воплощаться в диапазоне, не отступающем от сущности настоящего изобретения на этапе реализации. Кроме того, различные изобретения могут быть выполнены посредством должного объединения нескольких компонентов, раскрытых в вышеупомянутом варианте осуществления. Например, некоторые из всех компонентов, используемых в вышеупомянутом варианте осуществления, могут быть удалены. Более того, компоненты в пределах разных вариантов осуществления могут быть должным образом объединены.
В соответствии с аспектом изобретения можно повысить возможность того, что режим движения может быть быстро установлен в нейтральный режим в ответ на действие, выполняемое волнующимся водителем.
Реферат
Устройство переключения для установки режима движения транспортного средства содержит рычаг-джойстик переключения (30), выполненный с возможностью автоматического возврата в опорное положение из нейтрального положения, блок обнаружения положения, блок установки. Блок обнаружения определяет, что рычаг-джойстик переключения (30) помещен в нейтральное положение. Блок установки устанавливает транспортное средство в нейтральное состояние, когда рычаг-джойстик переключения (30) удерживается в нейтральном положении в течение определенного времени или дольше; и устанавливает транспортное средство в нейтральное состояние, когда рычаг-джойстик переключения (30) помещается в нейтральное положение несколько раз в течение предварительно определенного времени. Достигается повышение возможности того, что режим движения может быть быстро установлен в нейтральный режим в ответ на действие, выполняемое волнующимся водителем. 5 з.п. ф-лы, 4 ил.
Формула
рычаг переключения, который смонтирован на транспортном средстве и который выполнен с возможностью автоматического возврата в опорное положение из нейтрального положения;
блок обнаружения положения, который выполнен с возможностью обнаружения того, что рычаг переключения помещен в нейтральное положение; и
блок установки, который выполнен с возможностью:
установки транспортного средства в нейтральное состояние, когда рычаг переключения удерживается в нейтральном положении в течение определенного времени или дольше, и
установки транспортного средства в нейтральное состояние, когда рычаг переключения помещается в нейтральное положение несколько раз в течение предварительно определенного времени.
опорное положение и нейтральное положение расположены на одной линии, и
блок установки выполнен с возможностью установки транспортного средства в нейтральное состояние, когда количество раз, которое рычаг переключения перемещается из опорного положения в нейтральное положение, составляет несколько раз или более в течение предварительно определенного времени.
Комментарии