Система управления транспортного средства - RU2561478C1
Код документа: RU2561478C1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе управления для транспортного средства, которая выполнена с возможностью регулирования характеристики управления для управления поведением транспортного средства или определения предпочтения в вождении у водителя (т.е. поведения или намерения водителя).
УРОВЕНЬ ТЕХНИКИ
По существу, характеристика управления движущей силой, переключением скорости, рулевым управлением или подвеской задается как предварительно определенная характеристика. Тем не менее, водитель транспортного средства иногда сменяется, и окружения движения, такие как тип дороги, условие поверхности дороги и т.д., значительно различаются при вождении транспортного средства. Следовательно, предпочтительно изменять характеристики вождения транспортного средства согласно потребности водителя. С этой целью, согласно традиционной системе управления, характеристика вождения транспортного средства изменяется посредством ручного переключения характеристики крутящего момента к более высокой характеристике крутящего момента или посредством изменения карты переключения скоростей для управления автоматической трансмиссией. Например, традиционные системы управления выполнены с возможностью выбора режима вождения транспортного средства из спортивного режима, при котором повышается быстрота поведения транспортного средства, нормального режима, при котором поведение транспортного средства сдерживается в определенных рамках по сравнению со спортивным режимом, и экономичного режима, при котором повышается экономия топлива. Тем не менее, каждый раз, когда водитель переключает режим вождения, водитель обязан управлять переключателем, чтобы выбирать режим вождения. Такая операция переключения может отвлекать водителя, и операция переключения режима вождения может быть задержана за счет такого манипулирования переключателем.
Чтобы устранить вышеописанные недостатки, согласно предшествующему уровню техники, предпринята попытка отражать намерение водителя в управлении транспортным средством посредством определения намерения водителя из поведения транспортного средства. Например, в JP 10-272955 раскрыта система управления, выполненную с возможностью вычислять степень спортивности на основе поперечного ускорения, угловой скорости руля, открытия дросселя и скорости открытия/закрытия дросселя.
Между тем, в JP 2009-530166 раскрыта аппаратная система управления, выполненную с возможностью определять стиль вождения водителя. С этой целью, аппаратная система управления согласно JP 2009-530166, выполнена с возможностью вычисления так называемой "эффективности использования поверхности" посредством взвешивания поперечного ускорения и продольного ускорения по отдельности, чтобы нормализовать эти ускорения, и вычисления эффективности использования поверхности на основе нормализованного поперечного ускорения и продольного ускорения. Согласно идеям JP 2009-530166, такая нормализация выполняется для того, чтобы получать отношение определенного ускорения к максимальному ускорению. В частности, эффективность использования поверхности указывает диапазон продольного и поперечного ускорения, в котором транспортное средство может работать безопасно, и эффективность использования поверхности получается посредством возведения в квадрат нормализованных ускорений и их сложения и посредством получения квадратного корня суммы этих ускорений. Таким образом, согласно JP 2009-530166, эффективность использования поверхности указывает эффективность использования области, в которой транспортное средство может работать безопасно, т.е. стиль вождения указывается посредством эффективности использования поверхности.
Дополнительно, в JP 2004-257435 раскрыто устройство управления, выполненное с возможностью определять намерение вождения в спортивном режиме водителя. С этой целью, устройство управления согласно JP 2004-257435, выполнено с возможностью изменения программы переключения скоростей в случае, если интегрированное значение ускорения транспортного средства превышает опорное значение, и наличие намерения вождения в спортивном режиме тем самым определяется.
Помимо этого, согласно идеям JP 2004-257435, определение наличия намерения вождения в спортивном режиме упрощается посредством уменьшения опорного значения в случае, если сопротивление движению является большим. Дополнительно, в JP 2007-536479 раскрыт другой способ для управления трансмиссией посредством выполнения взвешивания. В частности, способ согласно JP 2007-536479 реализуется с возможностью оптимизирования процесса переключения в зависимости от типа транспортного средства и состояния движения. С этой целью, согласно идеям JP 2007-536479, входная переменная, влияющая на операцию переключения передач, нормализуется и взвешивается.
По существу, состояние движения транспортного средства изменяется в зависимости от окружения движения, к примеру, состояния дороги, а также изменяется посредством выполнения неожиданной операции в силу привычки водителя. Помимо этого, состояние движения транспортного средства также изменяется посредством временной операции для избегания определенного препятствия. Тем не менее, согласно идеям JP 10-272955, система управления выполнена с возможностью вычисления степени спортивности при отражении вышеуказанного окружения движения и конкретных факторов. Следовательно, степень спортивности не может быть точно вычислена.
Как описано выше, аппаратная система управления согласно JP 2009-530166 выполнена с возможностью осуществления взвешивания, чтобы получать отношение определенного ускорения к максимальному ускорению. Т.е. в случае, если определенное ускорение отклоняется от намерения водителя за счет состояния движения транспортного средства, или в случае, если отношение между ними изменяется согласно состоянию движения транспортного средства, стиль вождения не может быть точно определен.
Как также описано, устройство управления согласно JP 2004-257435 выполнено с возможностью изменения опорного значения для определения намерения вождения в спортивном режиме согласно сопротивлению движению. Следовательно, в случае, если сопротивление движению изменяется независимо от операций вручную, определение намерения вождения в спортивном режиме может удовлетворяться или не удовлетворяется попеременно посредством такого изменения сопротивления движению. В этом случае, содержимое управления может изменяться посредством такого чередования определения, и как результат, программа переключения скоростей может быть изменена без выполнения конкретных операций вручную. Следовательно, водитель может испытывать некомфортное ощущение. Т.е. хотя устройство управления выполнено с возможностью отражения намерения водителя в состоянии движения, устройство управления с такой конфигурацией может изменять состояние движения транспортного средства независимо от намерения водителя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение создано с учетом вышеописанных технических проблем, и его задачей является создание системы управления транспортного средства, допускающей точное определение предпочтения в вождении у водителя и регулирование характеристики управления транспортного средства в соответствии с намерением водителя.
Для решения заданной задачи согласно настоящему изобретению, предусмотрена система управления транспортного средства, которая выполнена с возможностью определения поведения транспортного средства или предпочтения в вождении у водителя на основе ускорения транспортного средства, включающего в себя, по меньшей мере, продольное ускорение. Согласно системе управления транспортного средства настоящего изобретения, значение ускорения, используемое для того, чтобы определять поведение транспортного средства или предпочтение при вождении, получается на основе взвешенного значения определения фактического продольного ускорения транспортного средства и взвешенного параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем. Весовой коэффициент параметра уменьшается в случае, если весовой коэффициент значения определения продольного ускорения увеличивается, и весовой коэффициент параметра увеличивается в случае, если весовой коэффициент значения определения продольного ускорения уменьшается.
Альтернативно, система управления транспортного средства настоящего изобретения также может быть выполнена с возможностью изменять характеристику управления транспортного средства. В частности, согласно другому аспекту настоящего изобретения, предусмотрена система управления транспортного средства, которая выполнена с возможностью управлять, по меньшей мере, любой из характеристик переключения скоростей, движущей силы, рулевого управления и подвески на основе значения определения продольного ускорения транспортного средства и параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем. Согласно системе управления транспортного средства с такой структурой, значение определения и параметр взвешиваются по отдельности. Весовой коэффициент параметра уменьшается в случае, если весовой коэффициент значения определения продольного ускорения увеличивается, и весовой коэффициент параметра увеличивается в случае, если весовой коэффициент значения определения продольного ускорения уменьшается.
Согласно настоящему изобретению, весовой коэффициент значения определения продольного ускорения и весовой коэффициент вышеуказанного параметра варьируются противоположным образом в зависимости от ситуации. В частности, весовой коэффициент значения определения продольного ускорения увеличивается в случае, когда продольное ускорение легко устанавливать, и весовой коэффициент параметра увеличивается в случае, когда продольное ускорение трудно устанавливать.
Более конкретно, случай, в котором продольное ускорение легко устанавливать, включает в себя случай, в котором транспортное средство движется на низкой скорости, а случай, в котором продольное ускорение трудно устанавливать, включает в себя случай, в котором транспортное средство движется на высокой скорости. Т.е. весовой коэффициент параметра уменьшается, и весовой коэффициент значения определения продольного ускорения увеличивается в случае, если транспортное средство движется на низкой скорости. Наоборот, весовой коэффициент параметра увеличивается, и весовой коэффициент значения определения продольного ускорения уменьшается в случае, если транспортное средство движется на высокой скорости.
Вышеуказанный параметр включает в себя: величину открытия акселератора; отношение значения определения продольного ускорения к максимальному продольному ускорению, возможному для установления в момент, когда продольное ускорение определяется; и отношение продольного ускорения, вычисленного на основе степени открытия акселератора, к максимальному продольному ускорению, возможному для установления в момент, когда продольное ускорение вычисляется.
Помимо этого, вышеуказанный параметр нормализуется в круге трения шины транспортного средства.
Таким образом, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью получать значение ускорения, используемое для того, чтобы определять поведение транспортного средства или предпочтение в вождении у водителя на основе взвешенного значения определения продольного ускорения транспортного средства и взвешенного параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем. Весовой коэффициент параметра уменьшается в случае, если весовой коэффициент значения определения увеличивается, и весовой коэффициент параметра увеличивается в случае, если весовой коэффициент значения определения уменьшается. Следовательно, предпочтение в вождении у водителя и поведение транспортного средства, которые должны достигаться, могут быть точно определены.
Согласно другому аспекту настоящего изобретения, по меньшей мере, любая из характеристик переключения скоростей, движущей силы, рулевого управления и подвески управляется на основе взвешенного значения определения продольного ускорения и взвешенного параметра, варьируемого посредством операции, чтобы увеличивать движущую силу, выполняемой водителем. Помимо этого, весовой коэффициент параметра уменьшается в случае, если весовой коэффициент значения определения увеличивается, и весовой коэффициент параметра увеличивается в случае, если весовой коэффициент значения определения уменьшается. Следовательно, характеристика управления может регулироваться в соответствии с намерением водителя.
Как описано выше, согласно настоящему изобретению, весовой коэффициент продольного ускорения увеличивается в случае, если транспортное средство движется на высокой скорости, по сравнению со случаем, в котором транспортное средство движется на низкой скорости. Следовательно, намерение водителя или поведение транспортного средства, проявляющиеся в форме продольного ускорения, могут быть точно определены. По этой причине, характеристики управления могут более точно регулироваться в соответствии с намерением водителя.
Как также описано, параметр, полученный на основе операции, чтобы увеличивать движущую силу, нормализуется в круге трения шины, который используется для того, чтобы вычислять значение ускорения для определения. Следовательно, предпочтение в вождении у водителя и поведение транспортного средства могут быть более точно определены.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - график, указывающий пример коэффициента, используемого для взвешивания;
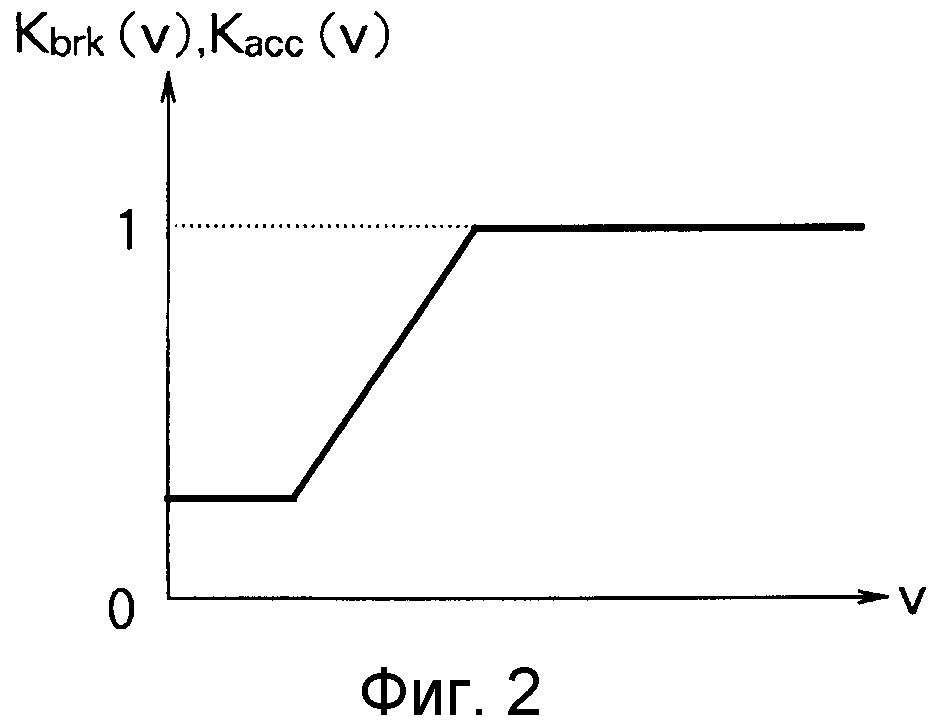
Фиг.2 - график, указывающий другой пример коэффициента, используемого для взвешивания;
Фиг.3 - блок-схема последовательности операций способа, поясняющая пример управления, чтобы вычислять характеристику управления с использованием управляющего SPI в качестве значения ускорения для определения;
Фиг.4 - вид, схематично показывающий транспортное средство, к которому применяется настоящее изобретение;
Фиг.5 - круг трения, иллюстрирующий определенное значение продольного ускорения и поперечного ускорения;
Фиг.6 - график, указывающий пример изменения управляющего SPI согласно изменению мгновенного SPI; и
Фиг.7 - график, указывающий интеграл отклонения между управляющим SPI и мгновенным SPI и сброс интеграла.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе управления транспортного средства для определения поведения транспортного средства или предпочтения в вождении у водителя, проявляющегося в поведении транспортного средства. В частности, указанное определение выполняется на основе продольного ускорения транспортного средства или синтезированного ускорения из продольного ускорения и поперечного ускорения либо на основе параметра, представляющего рабочую величину устройства для управления движущей силой, к примеру, степень открытия акселератора. Такое управление для определения состояния транспортного средства на основе синтезированного ускорения, включающего в себя продольное ускорение, известно в предшествующем уровне техники, как раскрыто, например, в JP 2009-530166. В качестве другого примера, система управления, которая поясняется далее, выполнена с возможностью использовать синтезированное ускорение, определенное последовательно, в качестве мгновенного индекса и обрабатывать мгновенный индекс, чтобы использовать обработанный индекс при определении для определения поведения транспортного средства или предпочтения при вождении (т.е. поведения или намерения водителя).
Например, система управления транспортного средства согласно настоящему изобретению может применяться к транспортному средству 1, показанному на Фиг.4. В транспортном средстве 1, вывод основного движителя, к примеру, двигателя или электромотора, операция переключения скоростей для изменения скорости и движущей силы основного движителя, рулевое управление и механизм подвески, поддерживающий транспортное средство и т.д., могут управляться электрически. Как показано на Фиг.4, транспортное средство 1 содержит пару передних колес 2 и пару задних колес 3. В частности, каждое из передних колес 2 выступает в качестве управляемого колеса, а каждое из задних колес 3 выступает в качестве ведомого колеса. Эти колеса 2 и 3 по отдельности присоединены к непоказанному кузову транспортного средства через подвеску 4. Подвеска 4 является традиционным механизмом подвески, состоящим, главным образом, из непоказанной пружины и амортизатора (т.е. демпфера) 5. Амортизатор 5, показанный на Фиг.4, выполнен с возможностью поглощать удар с использованием гидравлического сопротивления воздуха или жидкости, и гидравлическое сопротивление в нем может увеличиваться и уменьшаться посредством электромотора 6, выступающего в качестве актуатора. Например, в случае увеличения гидравлического сопротивления в амортизаторе 5, жесткость подвески 4 повышается, так что опускание транспортного средства 1 затрудняется. Как результат, ощущение при вождении транспортного средства 1 становится гораздо более спортивным, чем комфортным. Помимо этого, высота транспортного средства 1 может регулироваться посредством регулирования сжатого воздуха в амортизаторе 5.
Хотя не показано конкретно на Фиг.4, передние и задние колеса 2 и 3 по отдельности содержат тормозной механизм. Эти тормозные механизмы приводятся в действие, чтобы применять тормозную силу к колесам 2 и 3 посредством нажатия педали 7 тормоза, размещаемой у сиденья водителя.
Традиционный двигатель внутреннего сгорания, электромотор, комбинация двигателя и электромотора (электродвигателя) и т.д. могут быть использованы в качестве основного движителя транспортного средства 1, и в примере, показанном на Фиг.4, двигатель внутреннего сгорания 8 используется в качестве основного движителя. Как показано на Фиг.4, дроссельный клапан 10 для управления впуском воздуха размещается во впускной трубе 9 двигателя 8. В частности, дроссельный клапан 10 является электронным дроссельным клапаном, который открывается и закрывается посредством актуатора 11, к примеру, электромотора с электрическим управлением. Актуатор 11 приводится в действие в соответствии с нажатием педали 12 акселератора, размещаемой у сиденья водителя, т.е. в соответствии со степенью открытия акселератора, тем самым регулируя степень открытия дроссельного клапана 10 до предварительно определенного угла.
Соотношение между степенью открытия акселератора и степенью открытия дроссельного клапана 10 может регулироваться произвольно, и если отношение степени открытия акселератора к степени открытия дроссельного клапана составляет приблизительно "один-к-одному", дроссельный клапан 10 реагирует непосредственно на операцию акселератора, так что спортивность поведения транспортного средства 1 повышается. Наоборот, в случае уменьшения степени открытия дроссельного клапана 10 относительно степени открытия акселератора поведение и ускорение транспортного средства 1 сдерживается в определенных рамках. В случае использования электромотора в качестве основного движителя, устройство управления током, к примеру, инвертор или преобразователь используется вместо дроссельного клапана 10. В этом случае, соотношение между степенью открытия акселератора и значением тока, т.е. характеристики поведения и ускорения транспортного средства 1 изменяются произвольно посредством регулирования тока в соответствии со степенью открытия акселератора посредством устройства управления током.
Трансмиссия 13 соединяется с выходной стороной двигателя 8. Трансмиссия 13 выполнена с возможностью произвольного изменения передаточного числа между входной частотой вращения и выходной частотой вращения. Например, традиционная автоматическая трансмиссия с зубчатой передачей, ременная бесступенчатая трансмиссия, тороидальная трансмиссия может быть использована в транспортном средстве 1. В частности, трансмиссия 13 содержит непоказанный актуатор и выполнена с возможностью изменения его передаточного числа пошагово или непрерывно посредством управления актуатором. По существу, трансмиссия 13 управляется так, что она оптимизирует передаточное число, чтобы повышать экономию топлива. С этой целью, карта переключения скоростей для определения передаточного числа согласно скорости транспортного средства 1 и степени открытия акселератора подготавливается заранее, и операция переключения скоростей трансмиссии 13 выполняется со ссылкой на карту. Альтернативно, передаточное число трансмиссии 13 оптимизируется посредством вычисления целевого вывода на основе скорости транспортного средства 1 и степени открытия акселератора, вычисления целевой частоты вращения двигателя на основе вычисленного целевого вывода и оптимальной кривой расхода топлива и выполнения операции переключения скоростей, чтобы достигать полученной целевой частоты вращения двигателя.
Режим вождения транспортного средства 1, к которому применяется система управления согласно настоящему изобретению, может выбираться из режима экономии топлива для уменьшения расхода топлива и мощностного режима для увеличения движущей силы. В частности, в режиме экономии топлива переключение коробки передач на более высокую передачу выполняется на относительно низкой скорости, и передаточное число сохраняется при относительно небольшом значении даже в случае, если транспортное средство управляется на низкой скорости. Наоборот, в мощностном режиме, переключение коробки передач на более высокую передачу выполняется на относительно высокой скорости, и передаточное число сохраняется при относительно большом значении даже в случае, если транспортное средство управляется на высокой скорости, тем самым увеличивая движущую силу и повышая ускорение. Это регулирование скорости выполняется посредством переключения карты переключения скоростей при коррекции потребности в движении или вычисленного передаточного числа. Помимо этого, трансмиссионный механизм, к примеру, преобразователь крутящего момента, имеющий блокировочную муфту, может размещаться между двигателем 8 и трансмиссией 13 согласно потребности. Выходной вал трансмиссии 13 соединяется с задними колесами 3 через дифференциал 14, используемый в качестве конечного механизма понижения.
Далее здесь поясняется механизм 15 рулевого управления для изменения ориентации передних колес 2. Механизм 15 рулевого управления содержит: руль 16; рулевой привод 17, выполненный с возможностью передавать вращение руля 16 на передние колеса 2; и усиливающий механизм 18, выполненный с возможностью усиливать угол поворота колес и силу поворота колес руля 16. Усиливающий механизм 18 содержит непоказанный актуатор и выполнен с возможностью управлять величиной усиления актуатора. Следовательно, отношение силы (или угла) поворота колес руля 16 к фактической силе (или углу) поворота передних колес 2 может быть аппроксимировано как "один-к-одному" посредством уменьшения усиливающей силы усиливающего механизма 18. Как результат, передние колеса 2 могут поворачиваться непосредственно в ответ на вращение руля 16, так что спортивность поведения транспортного средства 1 повышается.
Хотя не показано конкретно, чтобы стабилизировать поведение и ориентацию транспортного средства 1, транспортное средство 1 дополнительно содержит антиблокировочную тормозную систему (сокращенно ABS), систему управления тягой и систему управления стабильностью транспортного средства (сокращенно VSC) для совместного управления этими системами. Эти системы являются известными в данной области техники и выполнены с возможностью стабилизировать поведение транспортного средства 1 посредством предотвращения захвата и проскальзывания колес 2 и 3. С этой целью, данные системы выполнены с возможностью управлять тормозной силой, применяемой к колесам 2 и 3, на основе отклонения между скоростью транспортного средства и скоростью вращения колес при управлении крутящим моментом двигателем. Помимо этого, транспортное средство 1 может содержать навигационную систему для получения данных относительно информации дороги и рассматриваемого маршрута (т.е. данных относительно окружения движения) и переключатель выбора режима для выбора режима вождения вручную из спортивного режима, нормального режима, энергосберегающего режима (т.е. экономичного режима) и т.д. Дополнительно, механизм привода на четыре колеса (4WD), выполненный с возможностью изменять такие характеристики, как способность преодолевать подъемы, ускорение, поворачиваемость и т.д., может размещаться на транспортном средстве 1.
Чтобы получать данные для управления двигателем 8, трансмиссией 13, амортизатором 5 подвеской 4, усиливающим механизмом 18 и вышеописанными непоказанными системами, различные виды датчиков размещаются в транспортном средстве 1. Например, датчик 19 определения скорости вращения колес, выполненный с возможностью определения частоты вращения каждого колеса 2 и 3, датчик 20 акселератора, выполненный с возможностью определения степени открытия акселератора, датчик 21 дросселя, выполненный с возможностью определения степени открытия дроссельного клапана 10, датчик 22 частоты вращения двигателя, выполненный с возможностью определения частоты вращения двигателя 8, датчик 23 выходной скорости, выполненный с возможностью определения выходной скорости трансмиссии 13, датчик 24 угла поворота колес, датчик 25 продольного ускорения, выполненный с возможностью определения продольного ускорения (Gx), датчик 26 поперечного ускорения, выполненный с возможностью определения поперечного (или бокового) ускорения (Gy), датчик 27 скорости рыскания и т.д. размещаются в транспортном средстве 1. Здесь, датчики ускорения, используемые в вышеописанных системах управления поведением, таких как антиблокировочная тормозная система (ABS) и система управления стабильностью транспортного средства (VSC), могут быть использованы в качестве датчиков 25 и 26 ускорения, и если подушка безопасности размещается в транспортном средстве 1, датчики ускорения для управления приведением в действие подушки безопасности также могут быть использованы в качестве датчиков 25 и 26 ускорения. Сигналы определения (т.е. данные) этих датчиков 19-27 передаются в электронный модуль управления (сокращенно ЭМУ) 28. ЭМУ 28 выполнен с возможностью осуществлять вычисление на основе данных, введенных в него, и заранее сохраненных данных и программ и выводить результат вычисления в вышеописанные системы или их актуаторы в форме сигнала команды управления.
Синтезированное ускорение транспортного средства, т.е. мгновенный индекс (называемый "мгновенным SPI" далее), может быть вычислено на основе продольного ускорения Gx и поперечного ускорения Gy с помощью следующей формулы:
Мгновенный SPI=(Gx2+Gy2)1/2
Продольное ускорение Gx включает в себя ускорение, являющееся результатом увеличения движущей силы посредством нажатия педали 12 акселератора, и замедление, являющееся результатом увеличения тормозной силы посредством нажатия педали 7 тормоза. Таким образом, замедление изменяется согласно силе нажатия для нажатия педали 12 тормоза. Тем не менее, как описано, степень открытия акселератора электрически преобразуется в степень открытия дроссельного клапана. Следовательно, хотя ускорение увеличивается посредством нажатия педали акселератора, чтобы увеличивать выходную мощность двигателя, степень ускорения изменяется в зависимости от характеристики управления выводом, т.е. в зависимости от соотношения между степенью открытия акселератора и степенью открытия дроссельного клапана или крутящего момента двигателя. Помимо этого, поскольку движущая сила также изменяется посредством передаточного числа, степень ускорения также изменяется в зависимости от характеристики управления переключением скорости. Дополнительно, когда транспортное средство движется, операция рулевого управления выполняется не только в случае изменения направления движения, но также и в различных ситуациях, например, в случае избегания препятствия или выбоины на поверхности дороги. Т.е. продольное ускорение Gx и поперечное ускорение Gy варьируются не только посредством намеренной операции, чтобы изменять состояние движения, но также и посредством временной операции, чтобы избегать опасности, независимо от намерения водителя поддерживать текущее состояние движения.
Следовательно, чтобы точно определять важные аспекты поведения транспортного средства или намерения водителя при исключении возмущений, таких как временное изменение ускорения, предпочтительно получать управляющий индекс для определения поведения транспортного средства и намерения водителя (соответствующий значению ускорения для определения настоящего изобретения) посредством обработки мгновенного SPI. Пример получения управляющего индекса поясняется далее. Фиг.5 является кругом трения, иллюстрирующим продольное ускорение Gx и поперечное ускорение Gy или синтезированное ускорение Gx и Gy, собранное посредством вождения транспортного средства. Мгновенный SPI постоянно вычисляется на основе ускорений Gx и Gy. Пример изменения мгновенного SPI указывается на Фиг.6.
Мгновенный SPI - это так называемое значение датчика, полученное посредством различения значения ускорения, определенного посредством датчика ускорения или посредством различения значения определения датчика скорости. Следовательно, мгновенный SPI не может быть стабилизирован и всегда колеблется мгновенно. Как описано выше, такое колебание мгновенного SPI вызывается посредством некоторого рода факторов независимо от намерения водителя. Следовательно, управляющий индекс для определения (называемый управляющим SPI далее) задается равным локальному максимальному значению мгновенного SPI и удерживается до тех пор, пока мгновенный SPI не увеличивается до большего локального максимального значения (чем удерживаемый управляющий SPI). Когда мгновенный SPI тем самым увеличивается до большего локального максимального значения, управляющий SPI обновляется до большего локального максимального значения мгновенного SPI и удерживается снова. Управляющий SPI, таким образом удерживаемый, понижается в случае, если мгновенный SPI, колеблющийся ниже локального максимального значения, удовлетворяет предварительно определенному условию. Управляющий SPI, таким образом определенный, указывается посредством жирной линии на Фиг.6. В частности, управляющий SPI является индексом, который используется в управлении для изменения характеристики поведения транспортного средства, и управляющий SPI, вычисленный на основе мгновенного SPI, сразу увеличивается с увеличением мгновенного SPI, но понижается после задержки относительно снижения мгновенного SPI. Как описано выше, управляющий SPI понижается на основе удовлетворения конкретного условия. В частности, мгновенный SPI, показанный на Фиг.6, соответствует проиллюстрированным значениям, указываемым на Фиг.5. Между тем, управляющий SPI задается на основе локального максимального значения мгновенного SPI, и управляющий SPI поддерживается до удовлетворения предварительно определенного условия. Таким образом, управляющий SPI увеличивается быстро, но понижается относительно медленнее.
В частности, в течение периода T1 от начала управления, мгновенный SPI на основе ускорения транспортного средства колеблется согласно изменению ускорения. Как показано на Фиг.6, колеблющийся мгновенный SPI увеличивается локально до максимального значения перед удовлетворением предварительно определенного условия, чтобы обновлять управляющий SPI. В этом случае, управляющий SPI задается на основе каждого локального максимального значения мгновенного SPI. Следовательно, управляющий SPI увеличивается ступенчато в течение периода T1. Затем, когда условие понижать управляющий SPI удовлетворяется в момент t2 или t3 времени, управляющий SPI начинает понижаться. Т.е. управляющий SPI понижается в случае, если поддержание предыдущего большого значения управляющего SPI не считается предпочтительным. В частности, согласно настоящему изобретению, такое условие, чтобы понижать управляющий SPI, удовлетворяется согласно истекшему времени.
Более конкретно, вышеуказанное условие, в котором "поддержание предыдущего большого значения управляющего SPI не считается предпочтительным", является случаем, в котором расхождение между управляющим SPI, поддерживаемым равным текущему значению, и текущим мгновенным SPI является относительно большим, и такое расхождение между этими индексами продолжается. Т.е. управляющий SPI не понижается, даже если мгновенный SPI понижается посредством непреднамеренного замедления. Например, управляющий SPI не понижается в случае, если педаль акселератора временно возвращается в силу привычки водителя или для того, чтобы поддерживать скорость транспортного средства после ускорения транспортного средства. Между тем, в случае, если мгновенный SPI колеблется ниже управляющего SPI в течение определенного периода времени, вышеуказанное условие понижать управляющий SPI удовлетворяется. Таким образом, продолжительность, в течение которой мгновенный SPI остается ниже управляющего SPI, может быть использована в качестве условия понижать управляющий SPI. Чтобы более точно отражать фактическое состояние движения транспортного средства в управляющем SPI, временное интегрирование (или накопление) отклонения между поддерживаемым управляющим SPI и мгновенным SPI может быть использовано в качестве условия понижать управляющий SPI. В этом случае, управляющий SPI понижается, когда временное интегрирование отклонения между этими индексами достигает предварительно определенного порогового значения. С этой целью, это пороговое значение может быть определено произвольно на основе дорожных испытаний или моделирования. В случае использования временного интегрирования в качестве условия понижать управляющий SPI, управляющий SPI должен быть понижен с учетом продолжительности расхождения мгновенного SPI от управляющего SPI, в дополнение к отклонению между управляющим SPI и мгновенным SPI. Следовательно, в этом случае, фактическое состояние движения или поведение транспортного средства может отражаться в управлении, чтобы более точно изменять характеристики вождения транспортного средства.
В примере, показанном на Фиг.6, продолжительность, чтобы поддерживать управляющий SPI перед моментом t2 времени превышает продолжительность, чтобы поддерживать управляющий SPI перед моментом t3 времени. Эти продолжительности для того, чтобы поддерживать управляющий SPI, определяются посредством управления, которое должно поясняться далее. В частности, как указано на Фиг.6, управляющий SPI увеличивается до предварительно определенного значения в конце вышеуказанного периода T1 и поддерживается. В этом случае, мгновенный SPI повышается мгновенно в момент t1 времени до того, как условие понижать управляющий SPI должно удовлетворяться в момент t2 времени. Следовательно, отклонение между управляющим SPI и мгновенным SPI в этом случае меньше предварительно определенного значения, и управляющий SPI, следовательно, поддерживается до момента t2 времени. Здесь, это предварительно определенное значение, чтобы понижать управляющий SPI, может быть определено произвольно на основе дорожных испытаний или моделирования с учетом ошибки в вычислении мгновенного SPI. В случае, если мгновенный SPI таким образом повышается близко к управляющему SPI, это означает то, что фактическое состояние движения транспортного средства является аналогичным состояниям ускорения и поворота, на которых основан поддерживаемый текущий управляющий SPI. Т.е. хотя определенный период времени истек с момента времени, в который сохраненный текущий управляющий SPI задан, фактическое состояние движения транспортного средства по-прежнему является аналогичным состоянию в момент времени, когда поддерживаемый текущий управляющий SPI задается. Следовательно, в этом случае, начало понижения управляющего SPI задерживается, даже если мгновенный SPI колеблется ниже поддерживаемого текущего управляющего SPI. Например, начало понижения управляющего SPI может быть задержано посредством сброса истекшего времени (т.е. времени накопления) или интеграла отклонения с момента времени, в который текущий управляющий SPI задан, и повторного начала накопления истекшего времени или интегрирования отклонения. Альтернативно, начало понижения управляющего SPI также может быть задержано посредством вычитания предварительно определенного значения из истекшего времени управляющего SPI или интеграла отклонения между индексами либо прерывания накопления истекшего времени или интегрирования отклонения в течение предварительно определенного периода времени.
Фиг.7 является графиком, указывающим вышеуказанный интеграл отклонения между управляющим SPI и мгновенным SPI и сброс интеграла. На Фиг.7, затененная область представляет интеграл отклонения между управляющим SPI и мгновенным SPI. В примере, указываемом на Фиг.7, сброс интеграла отклонения выполняется в момент t1 времени, в который расхождение между управляющим SPI и мгновенным SPI становится меньше предварительно определенного значения Δd, и интегрирование отклонения между этими индексами повторно начинается с момента t1 времени. Следовательно, даже если текущий управляющий SPI поддерживается в течение длительного времени, не допускается удовлетворение условия понижать управляющий SPI в момент t1 времени, так что управляющий SPI поддерживается равным предыдущему значению. Затем, когда мгновенный SPI превышает управляющий SPI после повторного начала интегрирования отклонения между этими индексами, управляющий SPI обновляется до локального максимального значения мгновенного SPI и поддерживается снова.
Помимо этого, в примере, показанном на Фиг.6, управляющий SPI поддерживается равным постоянному значению после момента t4 времени. Это обусловлено тем, что неожиданная ситуация исключается из рассмотрения в качестве изменения состояния движения после момента t4 времени. В частности, неожиданная ситуация может иллюстрироваться посредством выполнения операции временного замедления или рулевого управления, чтобы избегать препятствия на дороге. Мгновенный SPI понижается значительно посредством такой временной операции. Тем не менее, такое опускание мгновенного SPI является только временным изменением, и оно не должно рассматриваться как потребность водителя изменять характеристику поведения транспортного средства. Следовательно, в случае, если такая временная операция выполняется, предпочтительнее поддерживать текущую характеристику поведения транспортного средства, чтобы достигать ощущения при вождении, ожидаемого водителем.
В случае выполнения операции, чтобы увеличивать движущую силу, например, в случае нажатия педали 12 акселератора, степень формируемого продольного ускорения может отличаться в зависимости от состояния движения, такого как скорость транспортного средства и градиент дороги. В частности, в случае ускорения движения транспортного средства посредством небольшого открытия акселератора, т.е. движения на низкой скорости, доступная движущая сила до максимального запаса (т.е. доступный запас) является большой, и сопротивление движению является небольшим. В этом случае, следовательно, высокое продольное ускорение может устанавливаться посредством нажатия педали 12 акселератора. Наоборот, в случае ускорения транспортного средства, управляемого на высокой скорости, посредством глубокого нажатия педали 12 акселератора, доступный запас движущей силы является небольшим, и сопротивление движению является высоким. В этом случае, следовательно, продольное ускорение, устанавливаемое посредством нажатия педали 12 акселератора, меньше по сравнению с продольным ускорением для случая, в котором транспортное средство движется на низкой скорости. Это справедливо и для градиента дороги. В частности, в случае, если транспортное средство преодолевает подъем, на котором градиент является большим, продольное ускорение, устанавливаемое посредством нажатия педали 12 акселератора, уменьшается по сравнению с продольным ускорением для случая, в котором транспортное средство движется по ровной дороге. Согласно настоящему изобретению, система управления транспортного средства выполнена с возможностью получения значения ускорения для определения с учетом такого изменения продольного ускорения в зависимости от состояния движения. В частности, система управления транспортного средства выполнена с возможностью получения значения ускорения для определения посредством взвешивания значения определения продольного ускорения, и весового коэффициента значения определения продольного ускорения различается в зависимости от случая, в котором продольное ускорение легко устанавливать, и случая, в котором продольное ускорение трудно устанавливать.
В примере, поясненном со ссылкой на Фиг.5-7, значение ускорения, т.е. управляющий SPI вычисляется на основе мгновенного SPI в качестве синтезированного ускорения, включающего в себя значение определения продольного ускорения. Управляющий SPI, таким образом вычисленный, используется для того, чтобы определять предпочтение в вождении у водителя или вычислять значение определения для определения поведения транспортного средства. Аналогично, аппаратная система управления согласно JP 2009-530166, выполнена с возможностью вычисления "эффективности использования поверхности" с использованием нормализованного продольного ускорения. Согласно настоящему изобретению, система управления транспортного средства выполнена с возможностью взвешивания (или корректировки) значения определения продольного ускорения Gx и получения синтезированного ускорения с использованием взвешенного значения (ориентировочно называемого вычисляемым значением) продольного ускорения Gx. Вычисляемое значение, которое используется для того, чтобы получать мгновенный SPI, может быть получено с помощью следующей формулы:
Gx'=Kacc2(v)·(фактическое ускорение Gx) (0≤Kacc2(v)≤1),
где Gx' представляет вычисляемое значение, Kacc2(v) представляет весовой коэффициент (т.е. поправочный коэффициент). Весовой коэффициент Kacc2(v) определяется заранее на основе дорожных испытаний или моделирования. Пример весового коэффициента Kacc2(v) показывается на Фиг.1.
Как указано на Фиг.1, весовой коэффициент Kacc2(v) увеличивается согласно увеличению скорости v транспортного средства. Как описано выше, весовой коэффициент Kacc2(v) может быть получен посредством выполнения дорожных испытаний или моделирования на каждой скорости или области скоростей. Следовательно, весовой коэффициент Kacc2(v) также может быть увеличен линейно или криволинейно согласно увеличению скорости транспортного средства вместо увеличения способом, указываемым посредством ломаной линии на Фиг.1. Причина для того, чтобы таким образом увеличивать весовой коэффициент Kacc2(v) согласно скорости транспортного средства, поясняется далее.
Как описано выше, в случае, если транспортное средство движется на низкой скорости, сопротивление движению, к примеру, сопротивление воздуха меньше по сравнению с сопротивлением движению для случая, в котором транспортное средство движется на высокой скорости, и педаль акселератора не нажимается глубоко (т.е. дроссельный клапан не открывается в значительной степени). В этом случае, следовательно, доступная движущая сила до максимального запаса (т.е. для максимального крутящего момента) является большой. Т.е. продольное ускорение может устанавливаться легко в этом случае. Следовательно, в случае, если транспортное средство движется на низкой скорости, считается, что фактическое продольное ускорение Gx, определенное посредством датчика или вычисленное на основе значения определения, относительно точно представляет поведение транспортного средства или намерение водителя (т.е. предпочтение при вождении). По этой причине, весовой коэффициент Kacc2(v) является небольшим в случае, если скорость транспортного средства является низкой. Наоборот, в случае, если транспортное средство движется на высокой скорости, сопротивление движению, к примеру, сопротивление воздуха больше по сравнению с сопротивлением движению для случая, в котором транспортное средство движется на низкой скорости, и педаль акселератора нажимается глубоко (т.е. дроссельный клапан открывается в значительной степени). В этом случае, следовательно, доступная движущая сила до максимального запаса (т.е. до максимального крутящего момента) является небольшой. Т.е. продольное ускорение трудно устанавливать в этом случае. Следовательно, в случае, если транспортное средство движется на высокой скорости, считается, что фактическое продольное ускорение Gx, определенное посредством датчика или вычисленное на основе значения определения, не представляет точно поведение транспортного средства или намерение водителя (т.е. предпочтение при вождении). Следовательно, весовой коэффициент Kacc2(v) для случая, в котором скорость транспортного средства является высокой, превышает весовой коэффициент Kacc2(v) для случая, в котором скорость транспортного средства является низкой. Таким образом, согласно примеру, показанному на Фиг.1, весовой коэффициент Kacc2(v), который должен применяться при фактическом продольном ускорении, чтобы определять (или оценивать) поведение транспортного средства или предпочтение в вождении у водителя, уменьшается в случае, когда продольное ускорение легко устанавливать. Наоборот, весовой коэффициент Kacc2(v) увеличивается в случае, когда продольное ускорение трудно устанавливать.
Между тем, степень замедления, ощущаемого водителем в случае торможения транспортного средства, может отличаться в зависимости от скорости транспортного средства. Следовательно, фактическое продольное ускорение Gx также может быть скорректировано в случае поломки транспортного средства. В случае торможения транспортного средства вычисляемое значение Gx', которое должно быть использовано для того, чтобы получать мгновенный SPI, может быть вычислено с помощью следующей формулы:
Gx'=Kbrk·(фактическое ускорение Gx) (0 Коэффициент Kbrk в вышеприведенной формуле также может быть определен на основе дорожных испытаний или моделирования. Например, как показано на Фиг.2, коэффициент Kbrk увеличивается согласно увеличению скорости транспортного средства после того, как скорость транспортного средства превышает предварительно определенное значение. В случае применения настоящего изобретения к системе, выполненной с возможностью определения поведения транспортного средства или предпочтения в вождении у водителя на основе управляющего SPI, мгновенный SPI вычисляется с помощью следующей формулы: Мгновенный SPI={Gx'2+(Ky·Gy)2}1/2, где Gy представляет поперечное ускорение, определенное посредством датчика или полученное на основе значения определения, и Ky является приростом поперечного ускорения Gy. Здесь, влияние продольного ускорения Gx на поведение транспортного средства отличается от влияния поперечного ускорения Gy. В частности, поперечное ускорение Gy более заметно проявляется в поведении транспортного средства по сравнению с продольным ускорением Gx. Следовательно, поперечное ускорение Gy корректируется посредством прироста Ky. С этой целью, прирост Ky задается равным "0 Как поясняется со ссылкой на Фиг.6 и 7, управляющий SPI вычисляется на основе мгновенного SPI. Управляющий SPI, таким образом вычисленный, представляет поведение транспортного средства в момент, когда водитель выполняет операцию, или сразу после выполнения операции. Другими словами, управляющий SPI представляет предпочтение в вождении у водителя. Следовательно, считается, что сам управляющий SPI представляет результат определения (или оценки) поведения транспортного средства и предпочтения в вождении у водителя. Поведение транспортного средства и предпочтение в вождении у водителя могут классифицироваться на следующие режимы, такие как спортивный режим, при котором транспортное средство поворачивается и ускоряется быстро и резко, умеренный режим, при котором поведение транспортного средства становится менее резким, и нормальный режим, в котором поведение транспортного средства находится между спортивным режимом и умеренным режимом. В каждом из режимов вождения различные варианты управления требуются, чтобы регулировать характеристики вождения транспортного средства. Следовательно, после того, как поведение транспортного средства или предпочтения в вождении у водителя определяется так, как пояснено выше, характеристики ходовой части (включающей в себя подвеску), движущая сила, рулевое управление, операция переключения скоростей и т.д. вычисляются и управляются на основе результата определения (т.е. на основе управляющего SPI). В частности, характеристика ходовой части определяется, главным образом, посредством характеристики подвески, поддерживающей транспортное средство. Например, жесткость амортизатора 5 повышается, и высота транспортного средства понижается в спортивном режиме. Наоборот, жесткость амортизатора 5 уменьшается, и высота транспортного средства повышается в умеренном режиме. Чтобы вычислять характеристику ходовой части, величина управления амортизатора 5 в соответствии с управляющим SPI определяется по карте, и величина управления амортизатора 5 вычисляется со ссылкой на карту. Затем, характеристика движущей силы поясняется далее. Движущая сила варьируется согласно выходной мощности двигателя 8 и передаточному числу, заданному посредством трансмиссии 13. Следовательно, характеристика движущей силы может регулироваться произвольно посредством регулирования соотношения между степенью открытия акселератора и степенью открытия дроссельного клапана и посредством регулирования передаточного числа относительно степени открытия акселератора и скорости транспортного средства. В частности, в спортивном режиме крутящий момент двигателя увеличивается практически пропорционально увеличению степени открытия акселератора. Между тем, в умеренном режиме крутящий момент двигателя уменьшается по сравнению со спортивным режимом. Помимо этого, в спортивном режиме передаточное число придерживается относительно большого значения даже в случае, если транспортное средство управляется на высокой скорости. Наоборот, в умеренном режиме, передаточное число придерживается относительно небольшого значения в большинстве случаев. Дополнительно, характеристика рулевого управления поясняется для справки. В спортивном режиме величина, чтобы усиливать рулевое управление посредством актуатора, уменьшается, чтобы повышать непосредственное ощущение. Наоборот, в умеренном режиме, величина, чтобы усиливать рулевое управление посредством актуатора, увеличивается. Здесь, продольное ускорение транспортного средства варьируется посредством управления акселератором водителем. Т.е. операция акселератора и продольное ускорение связаны друг с другом. Следовательно, в случае получения вычисляемого значения продольного ускорения при взвешивании продольного ускорения, как описано выше, прежде всего, другой параметр, который варьируется согласно операции ускорения или замедления водителя, взвешивается. Затем, вычисляемое значение Gx' продольного ускорения Gx вычисляется с использованием вычисляемого значения упомянутого другого параметра, таким образом полученного, и взвешенного значения продольного ускорения. Как результат, мгновенный SPI и управляющий SPI могут быть получены при более точном отражении поведения транспортного средства и предпочтения в вождении у водителя. Следовательно, поведение транспортного средства и предпочтение в вождении у водителя могут быть более точно определены (или оценены). Например, отношение фактического продольного ускорения Gx к максимальному ускорению Gmax(v) (т.е. величина фактического продольного ускорения) может быть использовано в качестве вышеуказанного другого параметра. В частности, максимальное ускорение Gmax(v) является максимальным ускорением, возможным для установления в момент, когда фактическое продольное ускорение Gx устанавливается. Максимальное ускорение Gmax(v) может быть получено на основе: максимального крутящего момента, возможного для формирования посредством двигателя 8 (т.е. максимального крутящего момента, сформированного посредством полного открытия акселератора), и передаточных отношений трансмиссии 13 и привода на ведущие колеса в момент, когда фактическое продольное ускорение Gx устанавливается; и весового коэффициента транспортного средства. Альтернативно, максимальное ускорение Gmax(v) может быть определено по карте. В этом случае, в частности, вычисляемое значение Gx' продольного ускорения Gx может быть вычислено с помощью следующей формулы: Gx'=Kacc(v)·(Gx/Gmax(v))·|круг трения|+(1-Kacc(v))·Gx. В вышеприведенной формуле Kacc является весовым коэффициентом, и, как описано, весовой коэффициент Kacc может быть определен, как показано на Фиг.2, посредством выполнения дорожных испытаний или моделирования. Здесь, Kacc и коэффициент Kbrk, используемые в случае торможения транспортного средства, не обязательно являются идентичными друг другу, и значения этих коэффициентов по существу отличаются друг от друга. Между тем, в вышеприведенной формуле, член (Gx/Gmax(v)) является величиной фактического продольного ускорения (т.е. отношением фактического продольного ускорения Gx к максимальному ускорению Gmax(v)). Дополнительно, в вышеприведенной формуле, |круг трения| является членом для нормализации величины фактического продольного ускорения в круге трения транспортного средства. В частности, значение, которое должно подставляться в член |круг трения|, получается посредством адаптации единицы радиуса круга трения шины для случая, в котором транспортное средство движется по дороге, на которой коэффициент µ трения является высоким, к единице фактического продольного ускорения Gx. Например, значение между 9,8 и 10,0 подставляется в член |круг трения|. Тем не менее, в случае, если рабочий объем двигателя транспортного средства является небольшим, предварительно определенное постоянное значение может подставляться в него. Таким образом, мгновенный SPI или управляющий SPI могут быть получены с использованием вычисляемого значения Gx' продольного ускорения Gx, вычисленного с использованием вышеуказанного другого параметра, варьируемого согласно операции ускорения или замедления водителя. В этом случае, если транспортное средство движется на низкой скорости, так что продольное ускорение легко устанавливать, весовой коэффициент фактического продольного ускорения Gx увеличивается, и весовой коэффициент параметра, варьируемого согласно операции ускорения или замедления водителя, уменьшается. Это обусловлено тем, что намерение водителя очевидно проявляется в поведении транспортного средства в этом случае. Наоборот, если транспортное средство движется на высокой скорости, так что продольное ускорение трудно устанавливать, весовой коэффициент параметра, варьируемого согласно операции ускорения или замедления водителя, увеличивается, и весовой коэффициент фактического продольного ускорения Gx уменьшается. Это обусловлено тем, что намерение водителя не проявляется очевидно в поведении транспортного средства в случае, если продольное ускорение тем самым трудно устанавливать. Альтернативно, величина целевого продольного ускорения может быть использована вместо вышеуказанной величины фактического продольного ускорения. В частности, величина целевого продольного ускорения является отношением целевого продольного ускорения Gx* к максимальному ускорению Gmax(v), возможному для установления в текущей ситуации (Gx*/Gmax(v)). По существу, целевое продольное ускорение Gx* вычисляется на основе степени открытия акселератора. Альтернативно, целевое продольное ускорение Gx* также может быть вычислено посредством: получения коэффициента открытия акселератора согласно скорости транспортного средства на основе ускорения для случая, в котором степень открытия акселератора является константой, минимального ускорения, постоянной степени открытия акселератора и дроби Вебера (т.е. соотношения согласно закону Вебера); и посредством вычисления на основе полученного коэффициента открытия акселератора, степени открытия акселератора, дроби Вебера и минимального ускорения. Соответственно, в случае вычисления вычисляемого значения Gx' продольного ускорения Gx с использованием целевого продольного ускорения Gx*, вычисляемое значение Gx' вычисляется посредством следующей формулы: Gx'=Kacc(v)·(Gx*/Gmax(v))·|круг трения|+(1-Kacc(v))·Gx. Фактическое продольное ускорение Gx и целевое продольное ускорение Gx* управляются посредством степени открытия акселератора, и максимальное ускорение Gmax(v) устанавливается посредством полного открытия акселератора. Следовательно, можно заменять величиной открытия акселератора вышеуказанную величину фактического продольного ускорения и величину целевого продольного ускорения. В частности, величина открытия акселератора является процентным отношением от фактической величины нажатия педали 12 акселератора при условии, что степень открытия акселератора для случая, в котором педаль 12 акселератора полностью нажимается, выражается как "100" или "8/8". В случае вычисления вычисляемого значения Gx' продольного ускорения Gx с использованием величины PA открытия акселератора, вычисляемое значение Gx' вычисляется посредством следующей формулы: Gx'=Kacc(v)·PA·|круг трения|+(1-Kacc(v))·Gx. Таким образом, вычисляемое значение Gx' продольного ускорения Gx может быть вычислено с использованием величины фактического продольного ускорения, величины целевого продольного ускорения или величины открытия акселератора. Помимо этого, весовой коэффициент любого из продольного ускорения Gx и упомянутого другого параметра, варьируемого согласно операции водителя, в котором более очевидно проявляется намерение водителя, увеличивается. 1Как результат, намерение водителя может более очевидно отражаться в вычисляемом значении Gx' продольного ускорения Gx либо в мгновенном SPI или управляющем SPI. Следовательно, поведение транспортного средства и предпочтение в вождении у водителя могут быть более точно определены с учетом не только продольного ускорения транспортного средства, но также и намерения водителя. Затем, здесь поясняется пример определения поведения транспортного средства и предпочтения в вождении у водителя с использованием управляющего SPI и задания характеристики управления на основе управляющего SPI. Фиг.3 является блок-схемой последовательности операций способа, поясняющей вышеуказанное управление. Прежде всего, значение Iin мгновенного SPI, т.е. синтезированное ускорение (т.е. синтезированное G) вычисляется (на этапе S1). Как описано выше, мгновенный SPI вычисляется с помощью следующей формулы: Мгновенный SPI={Gx'2+(Ky·Gy)2}1/2, и вычисляемое значение Gx' продольного ускорения Gx для случая, в котором педаль 12 акселератора нажимается, чтобы ускорять транспортное средство, может быть вычислено с использованием любой из следующих формул: Gx'=Kacc2(v)·(фактическое ускорение Gx); Gx'=Kacc(v)·(Gx/Gmax(v))*|круг трения|+(1-Kacc(v))·Gx; Gx'=Kacc(v)·(Gx*/Gmax(v))*круг трения|+(1-Kacc(v))·Gx; и Gx'=Kacc(v)·PA·|круг трения|+(1-Kacc(v))·Gx. Затем, значение Iin сравнивается со значением Iout удерживаемого управляющего SPI (на этапе S2). В случае, если значение Iin мгновенного SPI превышает значение Iout управляющего SPI, так что ответом этапа S2 является "Да", значение Ioutуправляющего SPI обновляется до значения Iin мгновенного SPI, как пояснено выше (на этапе S3). В течение периода поддержания управляющего SPI равным текущему значению Iout, отклонение между Iin и Iout накапливается. Тем не менее, когда значение Iout управляющего SPI обновляется, сброс интеграла отклонения D выполняется (на этапе S4). В частности, интеграл отклонения D сбрасывается до 0. D=0 Наоборот, в случае, если ответом этапа S2 является "Нет", т.е. в случае, если значение Iin мгновенного SPI меньше значения Iout управляющего SPI, отклонение Δd между значением Iout управляющего SPI и значением Iin мгновенного SPI вычисляется (на этапе S5). В частности, отклонение Δd вычисляется с помощью следующей формулы: Δd = Iout - Iin Затем, интеграл отклонения D между значением Iout управляющего SPI и значением Iin мгновенного SPI вычисляется (на этапе S6) с помощью следующей формулы: D = D + отклонение Δd. Затем, определяется то, меньше или нет интеграл отклонения D между значением Iout управляющего SPI и значением Iin мгновенного SPI порогового значения DO начала уменьшения, предварительно заданного (на этапе S7). В частности, пороговое значение DO начала уменьшения используется для того, чтобы определять момент времени, чтобы начинать понижение значения Iout поддерживаемого управляющего SPI, другими словами, пороговое значение DO начала уменьшения используется для того, чтобы задавать продолжительность для поддержания текущего значения Iout управляющего SPI. Следовательно, когда интеграл отклонения D превышает пороговое значение DO начала уменьшения, определение, чтобы начинать понижение значения Iout управляющего SPI, выполняется. В случае, если интеграл отклонения D между значением Iout управляющего SPI и значением Iin мгновенного SPI меньше порогового значения DO начала уменьшения, так что ответом этапа S7 является "Да", значение Iout управляющего SPI поддерживается равным текущему значению (на этапе S8). Наоборот, в случае, если интеграл отклонения D между значением Iout управляющего SPI и значением Iin мгновенного SPI превышает пороговое значение DO начала уменьшения, так что ответом этапа S7 является "Нет", процедура переходит к этапу S9, чтобы понижать значение Iout управляющего SPI. Чтобы уменьшать некомфортное ощущение водителя, способ, чтобы понижать значение Iout управляющего SPI, может регулироваться произвольно. После того, как значение Iout управляющего SPI тем самым определяется на этапе S4, S8 или S9, характеристика ходовой части (т.е. характеристика подвески) вычисляется на основе вычисленного значения Iout управляющего SPI (на этапе S10), и затем характеристика движущей силы вычисляется на основе вычисленного значения Iout управляющего SPI (на этапе S11). Варианты управления заданием этих характеристик управления выполняются так, как пояснено выше. В дополнение к подвеске и движущей силе, характеристика рулевого управления также может вычисляться и управляться на основе вычисленного значения Iout управляющего SPI. Настоящее изобретение может применяться не только к системе, выполненной с возможностью определения поведения транспортного средства и предпочтения при вождении, на основе управляющего SPI, но также и к аппаратной системе управления согласно JP 2009-530166, выполненной с возможностью определения стиля вождения водителя посредством вычисления состояния транспортного средства, к примеру, эффективности использования поверхности на основе продольного ускорения. Таким образом, система управления транспортного средства согласно настоящему изобретению выполнена с возможностью осуществлять вышеописанные варианты управления с использованием, главным образом, электронного модуля управления. Т.е. система управления транспортного средства настоящего изобретения выполнена с возможностью определения поведения транспортного средства или предпочтения в вождении у водителя на основе ускорения транспортного средства, включающего в себя, по меньшей мере, продольное ускорение, и содержит следующие функциональные средства для выполнения вышеописанных вариантов управления. В частности, система управления транспортного средства настоящего изобретения содержит: средство вычисления ускорения, которое выполнено с возможностью вычисления значения ускорения, используемое для того, чтобы определять поведение транспортного средства или предпочтение при вождении на основе взвешенного значения определения фактического продольного ускорения транспортного средства и взвешенного параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем; и средство взвешивания, которое выполнено с возможностью уменьшения весового коэффициента параметра в случае, если весовой коэффициент значения определения продольного ускорения увеличивается, и увеличения весового коэффициента параметра в случае, если весовой коэффициент значения определения продольного ускорения уменьшается. Согласно другому аспекту настоящего изобретения, система управления транспортного средства выполнена с возможностью управления, по меньшей мере, любой из характеристик переключения скоростей, движущей силы, рулевого управления и подвески на основе значения определения продольного ускорения транспортного средства и параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем. Система управления транспортного средства с такой структурой содержит средство взвешивания, которое выполнено с возможностью взвешивания значения определения и параметр. В частности, средство взвешивания выполнено с возможностью уменьшения весового коэффициента параметра в случае, если весовой коэффициент значения определения продольного ускорения увеличивается, и увеличения весового коэффициента параметра в случае, если весовой коэффициент значения определения продольного ускорения уменьшается.
Реферат
Предложена система управления транспортного средства, которая выполнена с возможностью определения поведения транспортного средства или предпочтения в вождении у водителя. В системе управления значение ускорения, используемое для того, чтобы определять поведение транспортного средства или предпочтение при вождении, получается на основе взвешенного значения определения фактического продольного ускорения транспортного средства и взвешенного параметра. Параметр варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем. Весовой коэффициент параметра уменьшается в случае, когда весовой коэффициент значения определения продольного ускорения увеличивается, и весовой коэффициент параметра увеличивается в случае, когда весовой коэффициент значения определения продольного ускорения уменьшается. Система выполнена с возможностью управления, любой из характеристик переключения скоростей, движущей силы, рулевого управления и подвески. Достигается определение предпочтения в вождении у водителя и регулирование характеристики управления в соответствии с намерением водителя. 2 н. и 4 з.п. ф-лы, 7 ил.
Формула
значение ускорения, используемое для того, чтобы определять поведение транспортного средства или предпочтение при вождении, получается на основе взвешенного значения определения фактического продольного ускорения транспортного средства и взвешенного параметра, который варьируется за счет операции увеличения движущей силы транспортного средства, выполняемой водителем; и
весовой коэффициент параметра уменьшается в случае, когда весовой коэффициент значения определения продольного ускорения увеличивается, и весовой коэффициент параметра увеличивается в случае, когда весовой коэффициент значения определения продольного ускорения уменьшается.
значение определения и параметр взвешиваются по отдельности; и
весовой коэффициент параметра уменьшается в случае, когда весовой коэффициент значения определения продольного ускорения увеличивается, и весовой коэффициент параметра увеличивается в случае, когда весовой коэффициент значения определения продольного ускорения уменьшается.
весовой коэффициент значения определения продольного ускорения увеличивается в случае, когда продольное ускорение легко устанавливать; и
весовой коэффициент параметра увеличивается в случае, когда продольное ускорение трудно устанавливать.
случай, в котором продольное ускорение легко устанавливать, включает в себя случай, в котором транспортное средство движется на низкой скорости;
случай, в котором продольное ускорение трудно устанавливать, включает в себя случай, в котором транспортное средство движется на высокой скорости;
весовой коэффициент параметра уменьшается, и весовой коэффициент значения определения продольного ускорения увеличивается в случае, когда транспортное средство движется на низкой скорости; и
весовой коэффициент параметра увеличивается, и весовой коэффициент значения определения продольного ускорения уменьшается в случае, когда транспортное средство движется на высокой скорости.
(i) величина открытия акселератора;
(ii) отношение значения определения продольного ускорения к максимальному продольному ускорению, возможному для установления в момент, когда определяется продольное ускорение; и
(iii) отношение продольного ускорения, вычисленного на основе степени открытия акселератора, к максимальному продольному ускорению, возможному для установления в момент, когда вычисляется продольное ускорение.
Комментарии