Медицинские системы взвешивания - RU2740082C2
Код документа: RU2740082C2
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает приоритет по предварительной заявке на патент США № 62/313,249, поданной 25 марта 2016 года, содержание которой включено в данный документ в полном объеме в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Данное раскрытие изобретения относится к системам взвешивания для медицинских вариантов применения, включая системы взвешивания, которые включают функциональные возможности регулировки температуры.
УРОВЕНЬ ТЕХНИКИ
[0003] Хирургическая жидкость используют во множестве различных медицинских процедур. Например, физиологический раствор часто используют во время операции для орошения оперируемого участка. Физиологический раствор можно выливать на оперируемый участок, чтобы промывать кровоточащую часть тела и часть тела с другим телесным веществом, обеспечивая при этом клиницисту хорошую видимость оперируемой части тела и чистые поверхности для выполнения операции. В качестве еще одного примера хирургическая жидкость может быть заморожена в виде жижицы, которую вводят в конкретный участок тела. Жижица может обеспечить локализованную гипотермическую терапию, охлаждая участок тела или орган, вокруг которого размещают жижицу. Это может быть практичным для временного уменьшения количества оксигенированной крови, необходимой организму, например, в таких чрезвычайных ситуациях, как остановка сердечной деятельности или тяжелая травма головы.
[0004] Регулирование температуры хирургической жидкости перед введением в тело может быть практичным для обеспечения безопасной и эффективной медицинской хирургической процедуры. Например, в случае применения хирургической жижицы хирургическая жидкость может быть охлаждена до температуры, достаточной для обеспечения жижицы, но не настолько низкой, чтобы хирургическая жижица достигла уровней температуры, причиняющих повреждение органов. В качестве другого примера, в случае применения жидкостного орошения хирургическая жидкость перед введением в тело пациента может быть нагрета до уровня выше комнатной температуры.
[0005] Находящиеся под анестезией пациенты не могут регулировать температуру своего тела. Это связано с тем, что участок мозга, который регулирует температуру тела, отключается из-за применения анестезии. Если хирургическая жидкость для орошения не нагревается перед введением в тело пациента, хирургическая жидкость может охладить температуру внутренней части тела пациента. В случае процедур, которые занимают больше времени или связаны с применением больших количеств жидкости для орошения, кумулятивный эффект охлаждения может увеличить риск непреднамеренной гипотермии. По этой причине хирургическая жидкость могут нагревать приблизительно до уровня стандартной температуры тела пациента 37 градусов по Цельсию (98,6 градуса по Фаренгейту), прежде чем вводить жидкость в тело пациента. Это может содействовать сведению к минимуму риска непреднамеренной гипотермии.
[0006] Независимо от того, нагревается ли или охлаждается ли хирургическая жидкость перед введением в тело пациента, медицинский брат или сестра или другой клиницист, ответственный за введение хирургической жидкости во время процедуры, может контролировать количество жидкости, вводимой пациенту. Как правило, хирургическая жидкость поступает расфасованной в бутылки стандартного размера, и клиницист может контролировать количество бутылок, используемых во время процедуры, для определения количества вводимой в тело пациента жидкости. Клиницист может контролировать количество используемой жидкости для обеспечения того, чтобы пациенту не вводилось слишком много жидкости и/или чтобы с тела пациента выводилось пропорциональное количество жидкости с использованием аспирационной установки.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0007] В общем, настоящее раскрытие изобретения относится к устройствам, системам и методикам для контроля и/или определения количества материала в хирургической среде и, при необходимости, для регулирования температуры такого материала. В некоторых конфигурациях устройство выполнено с возможностью приема хирургической жидкости, которая должна использоваться во время медицинской процедуры, нагрева жидкости до температуры, подходящей для введения пациенту-млекопитающему, и активного отслеживания объема жидкости, удаляемого из устройства во время процедуры. Устройство может отслеживать объем жидкости, вводимой в устройство и/или удаляемой из устройства с использованием любого подходящего устройства для измерения объема. Например, устройство для измерения объема может быть реализовано путем измерения массы жидкости и дальнейшего определения объема на основании запрограммированной плотности жидкости, путем измерения уровня жидкости в раковине, путем измерения объема жидкости, отпускаемой через заполняющее впускное отверстие и/или выпускное отверстие, или еще другими устройствами для измерения объема. При настройке для измерения массы устройство может предусматривать пригодное устройство взвешивания для взвешивания объектов в хирургической среде, например, образцов, извлеченные из тела пациента. В случае этих вариантов применения взвешивания устройство может иметь или может не иметь функции регулировки температуры.
[0008] В некоторых примерах система выполнена в качестве нагревателя хирургической жидкости, которое содержит раковину, которая принимает и удерживает хирургическую жидкость. Раковина поддерживается основанием, например, подвижным основанием, установленным на роликах, чтобы система могла легко перемещаться с одного места в другое. Система содержит нагреватель, находящийся в тепловом контакте с раковиной и выполненный с возможностью нагрева хирургической жидкости, размещенной в раковине, до целевой температуры. Кроме того, система содержит устройство для измерения объема. Устройство для измерения объема расположено для получения информации об объеме хирургической жидкости, добавленной в раковину. Например, в разных вариантах применения устройство для измерения объема может быть реализовано с использованием тензодатчика, который косвенно измеряет объем путем измерения веса раковины и ее содержимого, поплавка, который поднимается и опускается в зависимости от уровня хирургической жидкости в раковине, или другого датчика, который измеряет объем хирургической жидкости в раковине. В любой конфигурации система может также содержать дисплей, который отображает объем хирургической жидкости, используемой во время процедуры. Дисплей может обновляться, по существу, в режиме реального времени, в то время, как жидкость удаляется из раковины и вводится пациенту, предоставляя клиницисту своевременную и точную информацию для принятия решений, выносимых на клиническом уровне.
[0009] На практике контроль общего объема хирургической жидкости, выводимой из раковины нагревателя хирургической жидкости, может быть сложной задачей, поскольку раковина может пополняться во время процедуры и/или нежидкостные компоненты могут периодически добавляться в раковину и выводиться из раковины во время процедуры. Например, клиницист может поместить в раковину стерильный шприц с резиновым баллончиком и/или стерильную градуированную измерительную емкость, а затем использовать эти инструменты во время процедуры по перегонке жидкости из раковины в тело пациента. Кажущийся объем хирургической жидкости в раковине будет увеличиваться или уменьшаться в зависимости от того, находятся ли данные инструменты в раковине или вне раковины.
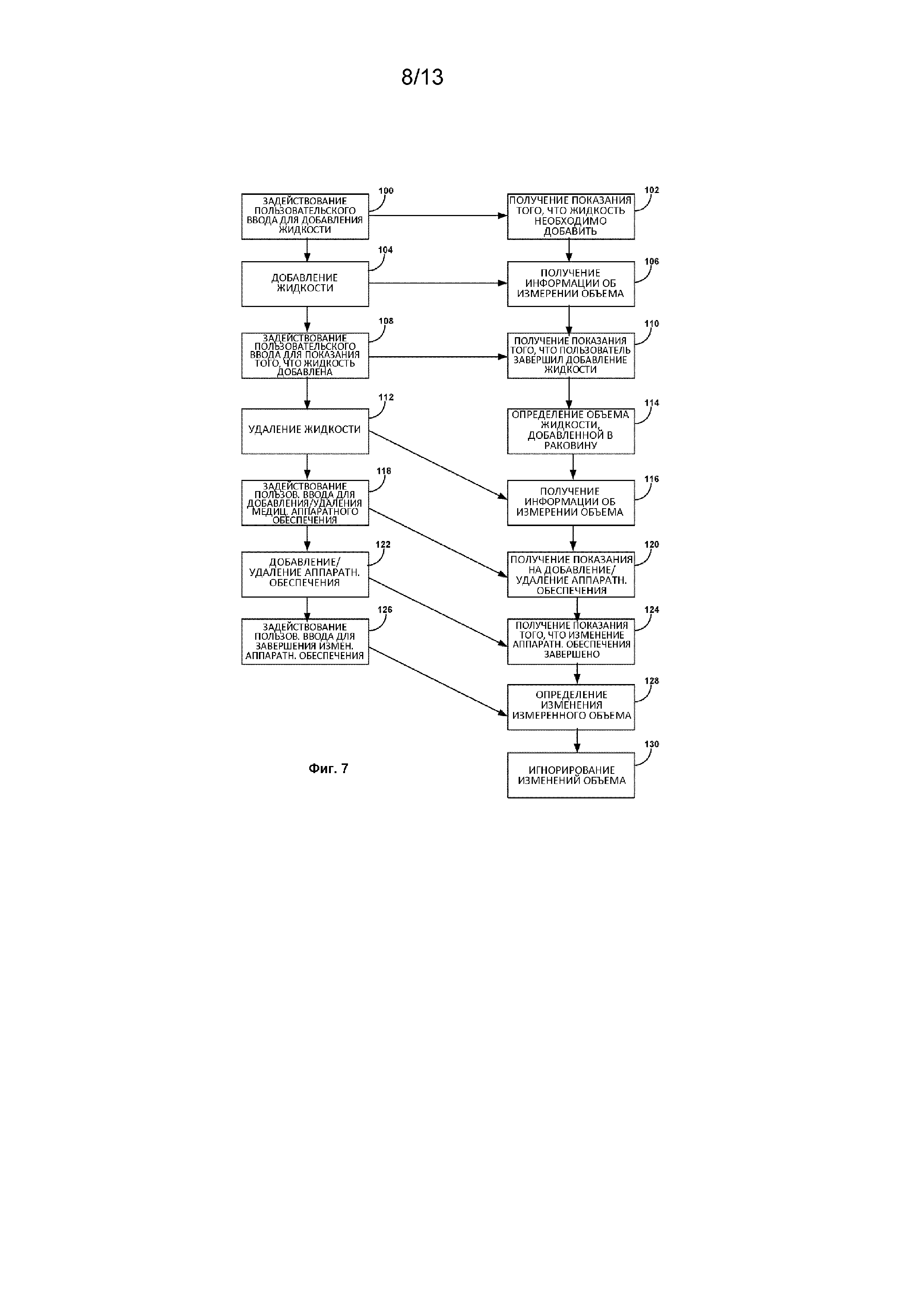
[0010] В некоторых системах в соответствии с настоящим раскрытием изобретения предусмотрен пользовательский интерфейс, с которым клиницист может взаимодействовать, чтобы сообщать системе о том, добавляется ли свежая жидкость в раковину, добавляется ли в раковину или удаляется из раковины инструмент, или тому подобное. Например, пользовательский интерфейс может содержать доступное для манипулирования пользователем средство ввода, такое как кнопка на консоли или сенсорный дисплей, или другой механизм (например, педаль), который пользователь может нажать, чтобы сообщить системе, что инструмент должен быть добавлен в раковину или удален из раковины. Пользовательский интерфейс может содержать отдельное доступное для манипулирования пользователем средство ввода, которое пользователь может нажать, чтобы сообщить системе, что в раковину необходимо добавить добавочную хирургическую жидкость. В качестве дополнительного или альтернативного варианта, система может содержать пользовательский интерфейс, который принимает звуковой входной сигнал или команды от пользователя, и/или оптический детектор, который определяет режим работы пользователя или команды для определения того, когда хирургическая жидкость или инструмент добавляются в раковину или удаляются из раковины.
[0011] Во время работы контроллер, связанный с системой, может контролировать объем жидкости в раковине на основании обратной связи от устройства для измерения объема. Контроллер может отслеживать уменьшение объема жидкости и связывать эти уменьшения с удалением жидкости и введения ее пациенту. Когда через пользовательский интерфейс контроллеру поступает информация о том, что в раковину должна быть добавлена свежая жидкость, контроллер может определить, что соответствующие изменения в измеренном объеме жидкости в раковине связаны с добавлением в раковину свежей жидкости, а не жидкости, ранее отобранной из раковины и возвращаемой из раковины. Даже в случае, когда через пользовательский интерфейс в контроллер не поступает информация о том, что свежая жидкость должна быть добавлена в раковину, если контроллер обнаруживает увеличенный объем жидкости в раковине (например, выше величины, обычно связанной с возвратом в раковину инструмента или жидкости), контроллер может обозначать увеличенный объем как добавляемую свежую жидкость. В вариантах применения, в которых система также выполнена с возможностью проверки инструментов внутри и вне раковины, контроллер может быть проинформирован через пользовательский интерфейс, что инструмент должен быть добавлен в раковину или удален из раковины. При таком информировании контроллер может игнорировать соответствующие изменения в измеренном объеме жидкости в раковине как связанные с добавлением в раковину или удалением из раковины инструмента, а не хирургической жидкости.
[0012] В вариантах применения, в которых система контролирует объем жидкости, удаляемой из раковины, путем обнаружения изменений веса, система может быть выполнена с плавающей конфигурацией раковины, которая позволяет раковине перемещаться относительно одного или более тензодатчиков. Раковина может иметь возможность перемещаться вверх и вниз по отношению к земле в определённом диапазоне перемещения, по мере того, как может меняться вес содержимого, размещенного в раковине. В некоторых конфигурациях раковину крепят на крепежной плите, которая прижимается к одному или более тензодатчикам с воздушным зазором, образованным между раковиной и тензодатчиком. Этот воздушный зазор, который может быть полностью лишен материала или может быть заполнен материалом с меньшей теплопроводностью, чем сама раковина, может помочь термически изолировать раковину от тензодатчика(ов). В процессе работы раковина и ее содержимое могут нагреваться, в то время как вес раковины и ее содержимого измеряют посредством тензодатчика(ов). Создание воздушного зазора между раковиной и тензодатчиком(ами) может помочь свести к минимуму степень нагревания тензодатчиков при нагревании раковины и ее содержимого. В свою очередь, это может помочь уменьшить или устранить погрешности взвешивания, вызванные повышением температуры тензодатчика(ов).
[0013] Независимо от конкретной конфигурации раковины по отношению к тензодатчику(ам), в вариантах применения, в которых система выполнена с возможностью измерения количества материала в раковине, а также нагрева материала, система может использовать измерения количества и температуры для контроля нагрева. Например, система может получать информацию от системы относительно количества материала в раковине, а также относительно измеренной температуры материала в раковине. В случае, когда система определяет, что количество материала в раковине сравнительно невелико (например, ниже порогового значения), система может управлять нагревателем, чтобы обеспечивать иную скорость нагрева, чем в случае, когда система определяет, что материала в раковине больше. Система может управлять нагревателем для нагрева материала в раковине до тех пор, пока температура материала не достигнет заданной измеренной температуры. В некоторых примерах система изменяет и уменьшает скорость, с которой нагреватель подает тепло, когда материал в раковине приближается (например, попадает в пороговый диапазон) к целевой температуре. Регулирование скорости нагрева в зависимости от количества материала в раковине и/или измеренной температуры материала может быть полезно для предотвращения перегрева материала, например, во время запуска, когда материал нагревается, начиная от температуры окружающей среды.
[0014] Система термической обработки в соответствии с настоящим раскрытием изобретения может иметь множество других характерных признаков помимо или вместо функциональных возможностей измерения объема и отслеживания. Например, система может содержать раковину, которая выполнена с возможностью приема одноразовой хирургической простыни. Хирургическая простыня может соответствовать форме раковины и иметь подол, который свисает через боковой край раковины. Размещение хирургической простыни в раковине может создать стерильное поле для последующего введения стерильной хирургической жидкости и/или инструментов в раковину и содержащиеся в ней хирургическую простыню.
[0015] Для содействия тому, чтобы хирургическая простыня, размещенная в раковине, подходила и была совместима с системой, например, могла переносить термические условия, создаваемые системой, без ухудшения ее свойств, система управления температурой может содержать бесконтактное устройство считывания. Бесконтактное устройство считывания может быть выполнено как часть системы, предназначенная для работы с соответствующими одноразовыми хирургическими простынями, содержащими бесконтактные метки. В процессе работы, когда клиницист размещает хирургическую простыню в раковине, бесконтактное устройство считывания может посылать сигнал для поиска соответствующей метки на хирургической простыне. Если система считывает идентификационную информацию с бесконтактной метки на хирургической простыне и подтверждает, что использование хирургической простыни разрешено, система может продолжить работу. С другой стороны, в случае, когда система определяет, что на хирургической простыне отсутствует бесконтактная метка или что идентификационная информация на метке не является разрешенной, система может запретить дальнейшую работу. В одном примере бесконтактное устройство считывания и соответствующая метка могут быть выполнены с использованием технологии коммуникации ближнего поля (NFC). Система в соответствии с настоящим раскрытием изобретения может иметь дополнительные или отличные характерные признаки, как описано в настоящем документе.
[0016] В одном примере описывается система термической обработки хирургической жидкости, которая содержит раковину, устройство для термической обработки, устройство для измерения объема и контроллер. Раковина выполнена с возможностью приема и удержания хирургической жидкости. Устройство для термической обработки находится в тепловом контакте с раковиной и выполнено с возможностью регулирования температуры хирургической жидкости в раковине. Устройство для измерения объема расположено для получения информации об объеме хирургической жидкости в раковине. В соответствии с примером, контроллер выполнен с возможностью приема информации об измерении объема от устройства для измерения объема относительно объема хирургической жидкости в раковине в ходе процедуры. Контроллер дополнительно выполнен с возможностью определения объема хирургической жидкости, удаленной из раковины во время процедуры.
[0017] В другом примере описан способ, который включает задействование пользовательского интерфейса на устройстве для термической обработки хирургической жидкости, что тем самым информирует устройство о том, что в устройство должна быть добавлена хирургическая жидкость. Способ дополнительно включает добавление хирургической жидкости в раковину устройства и задействование пользовательского интерфейса устройства, что тем самым информирует устройство о том, что в устройство была добавлена хирургическая жидкость. Способ включает удаление хирургической жидкости из раковины и отображение устройством объема хирургической жидкости, удаленной из раковины.
[0018] В другом примере описана система для нагрева хирургической жидкости. Система содержит основание, установленную на колесах, и раковину, поддерживаемую и вертикально поднятую над основанием, при этом раковина выполнена с возможностью приема и удерживания хирургической жидкости. Система также содержит нагреватель, находящийся в тепловом контакте с раковиной и выполненный с возможностью повышения температуры хирургической жидкости в раковине, и устройство взвешивания, расположенное для получения информации о весе, касающейся веса раковины и ее содержимого. Система дополнительно содержит пользовательский интерфейс, выполненный с возможностью приема показания пользователя относительно того, что в раковину должна быть добавлена хирургическая жидкость. Контроллер выполнен с возможностью приема информации об измерении веса от устройства для измерения веса относительно веса хирургической жидкости в раковине в ходе процедуры получения через пользовательский интерфейс по меньшей мере одного показания о том, что во время процедуры в раковину должен быть добавлен или из раковины должен быть удален медицинский инструмент, и определения объема хирургической жидкости, используемой во время процедуры, на основании полученной информации об измерении веса и по меньшей мере одного полученного показания.
[0019] В другом примере описана система термической обработки, которая содержит раковину для жидкости, устройство для термической обработки, крепежную плиту и устройство для измерения веса. Раковина для жидкости имеет дно и по меньшей мере одну боковую стенку, которые выполнены с возможностью приема и удержания материала. Устройство для термической обработки находится в тепловом контакте с раковиной для жидкости и выполнено с возможностью регулирования температуры материала в раковине для жидкости. Крепежная плита имеет первую сторону и вторую сторону, расположенную напротив первой стороны. Крепежная плита прикреплена к раковине для жидкости с воздушным зазором, образованным между первой стороной крепежной плиты и дном раковины для жидкости. Устройство для измерения веса расположено на второй стороне крепежной плиты, которая выполнена с возможностью измерения веса раковины для жидкости и ее содержимого.
[0020] В следующем примере описана система термической обработки. Система термической обработки содержит раковину, выполненную с возможностью приема и удержания подлежащего нагреву материала, устройство для термической обработки, находящееся в тепловом контакте с раковиной и выполненное с возможностью регулирования температуры материала, подлежащего нагреванию в раковине, устройство для измерения веса, расположенное для измерения веса раковины и материала в ней, пользовательский интерфейс и контроллер. Контроллер сообщается с пользовательским интерфейсом, устройством для термической обработки и устройством для измерения веса. В этом примере указывается, что контроллер выполнен с возможностью получения через пользовательский интерфейс целевой температуры, до которой необходимо нагревать материал в раковине, получения информации об измерении веса от устройства для измерения веса относительно веса раковины и материала в ней и получения информации об измерении температуры от датчика температуры относительно измеренной температуры материала в раковине. Контроллер дополнительно выполнен с возможностью управления устройством для термической обработки для нагрева раковины и материала в ней на основании информации об измерении веса, полученной от устройства для измерения веса, и информации об измерении температуры, полученной от датчика температуры, для нагрева материала в раковине до целевой температуры.
[0021] В дополнительном примере описано устройство для измерения веса, которое содержит основание и раковину, поддерживаемую основанием. Раковина выполнена с возможностью приема и удержания материала, подлежащего взвешиванию. Раковина содержит дно и наклонную боковую стенку, проходящую вертикально вверх от дна, причем дно и наклонная боковая стенка вместе образуют ограниченную полость с открытой верхней поверхностью, которая принимает и удерживает материал, подлежащий взвешиванию. Устройство также содержит устройство взвешивания, расположенное для получения информации о весе относительно веса раковины и материала в ней, пользовательский интерфейс и контроллер. Контроллер выполнен с возможностью приема информации об измерении веса от устройства для измерения веса относительно веса раковины и материала, подлежащего взвешиванию, и отображения веса материала, подлежащего взвешиванию, на пользовательском интерфейсе.
[0022] Подробности одного или более примеров приведены на прилагаемых графических материалах и в описании ниже. Другие характерные признаки, объекты и преимущества будут очевидны из описания и графических материалов, а также из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
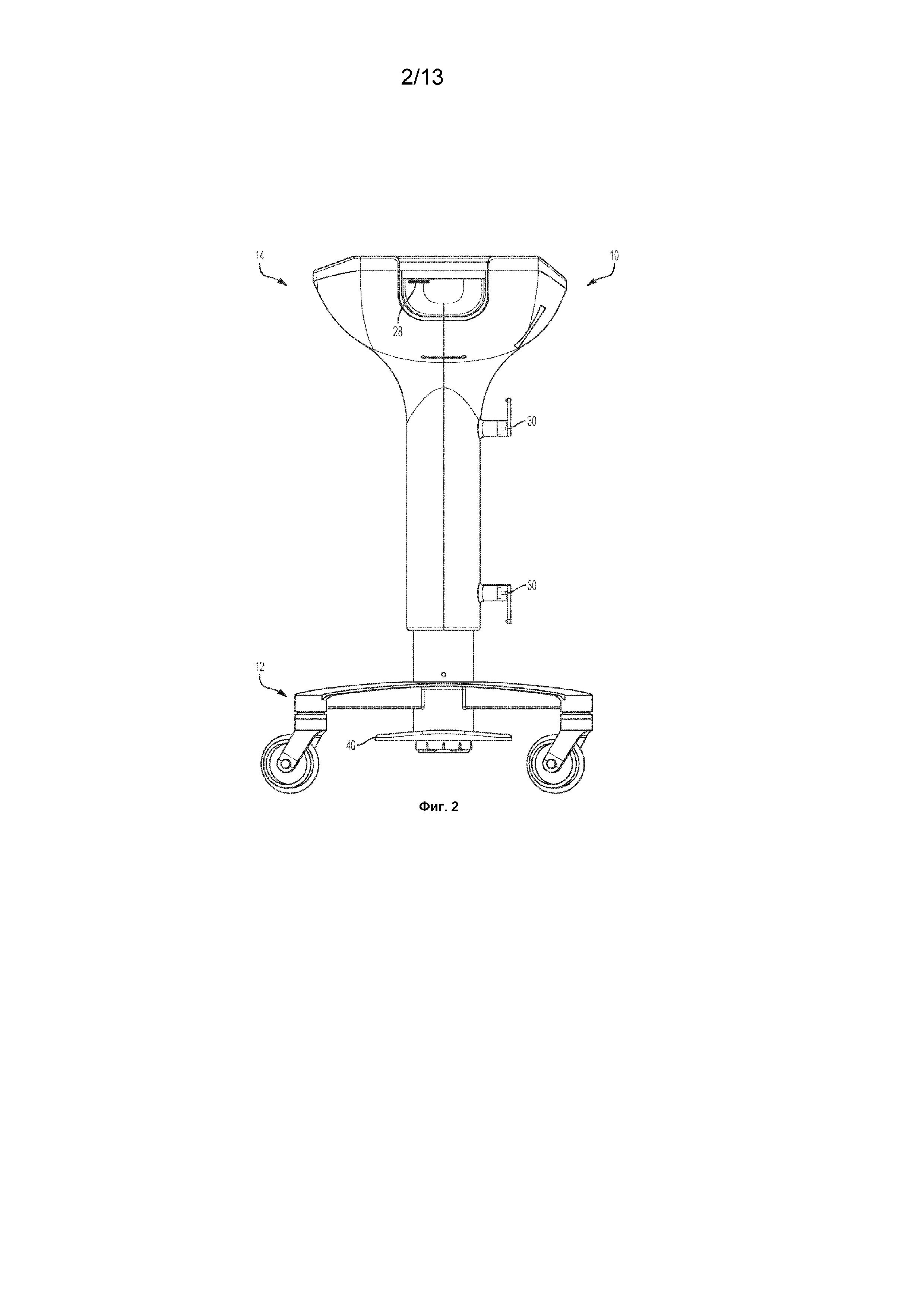
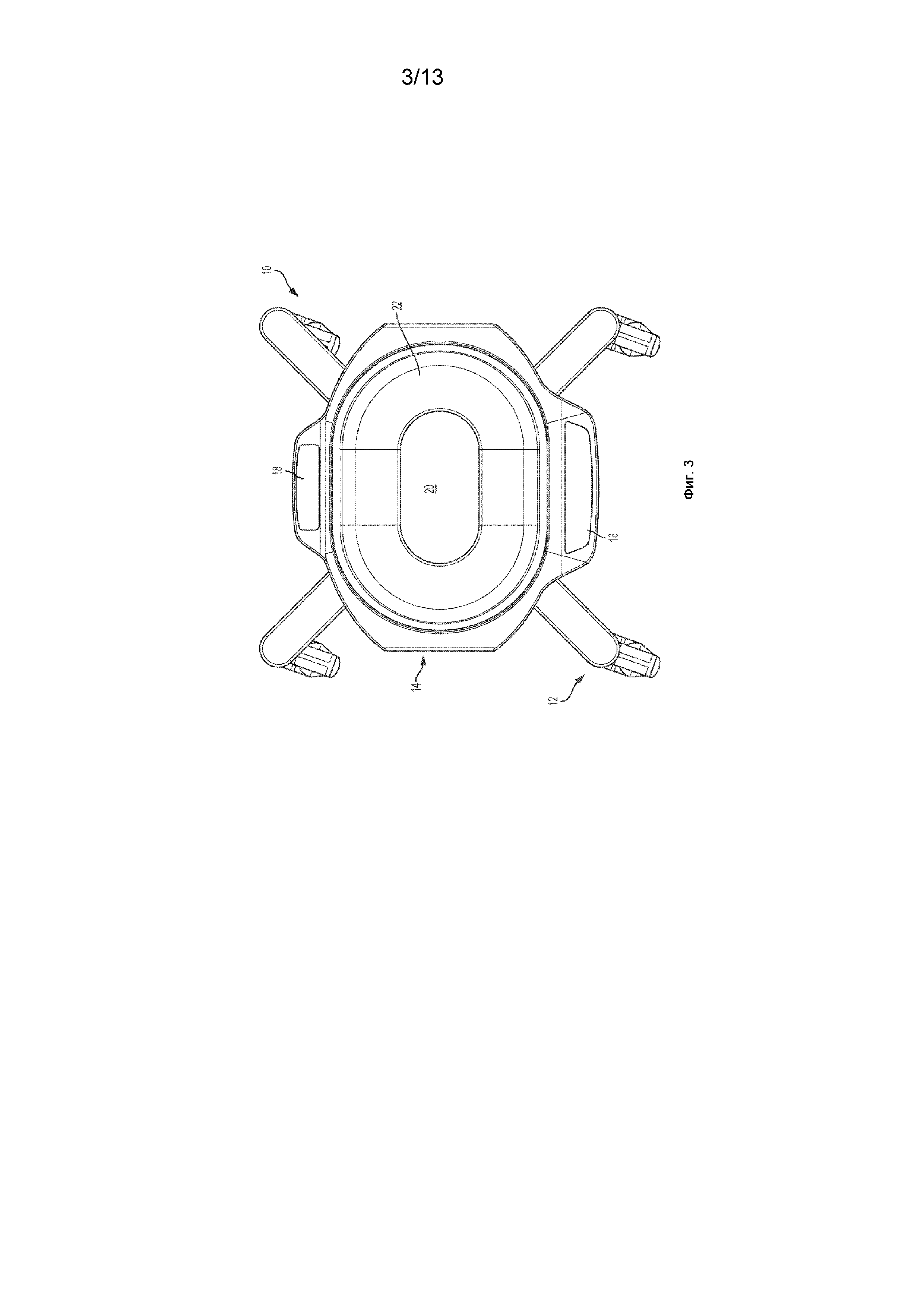
[0023] На фиг. 1-3 проиллюстрированы соответственно вид в перспективе, вид спереди и вид сверху приведенной в качестве примера системы термической обработки хирургической жидкости.
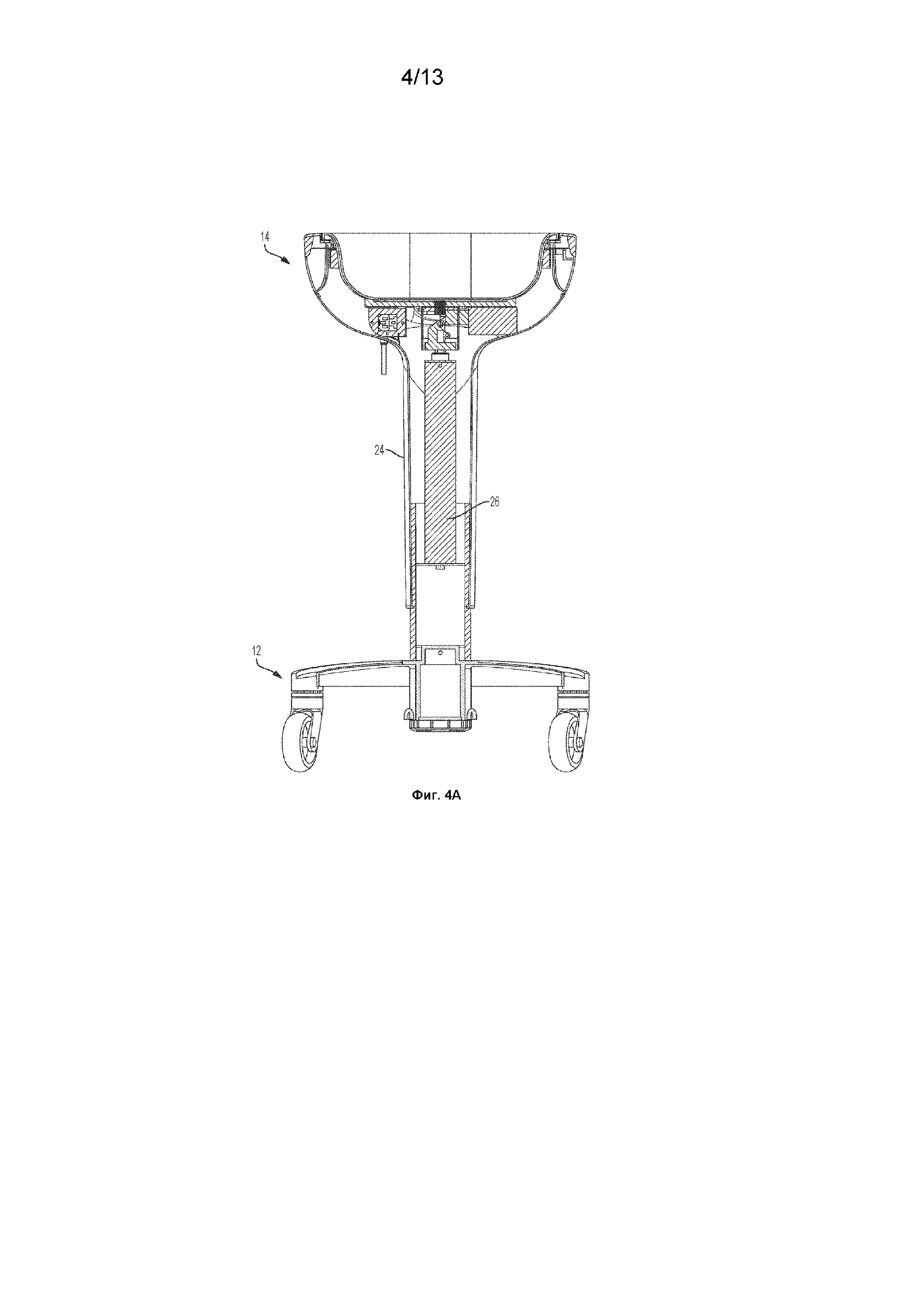
[0024] На фиг. 4А проиллюстрирован вид в сечении приведенной в качестве примера системы, проиллюстрированной на фиг. 1-3, по линии сечения A-A, проиллюстрированной на фиг. 1.
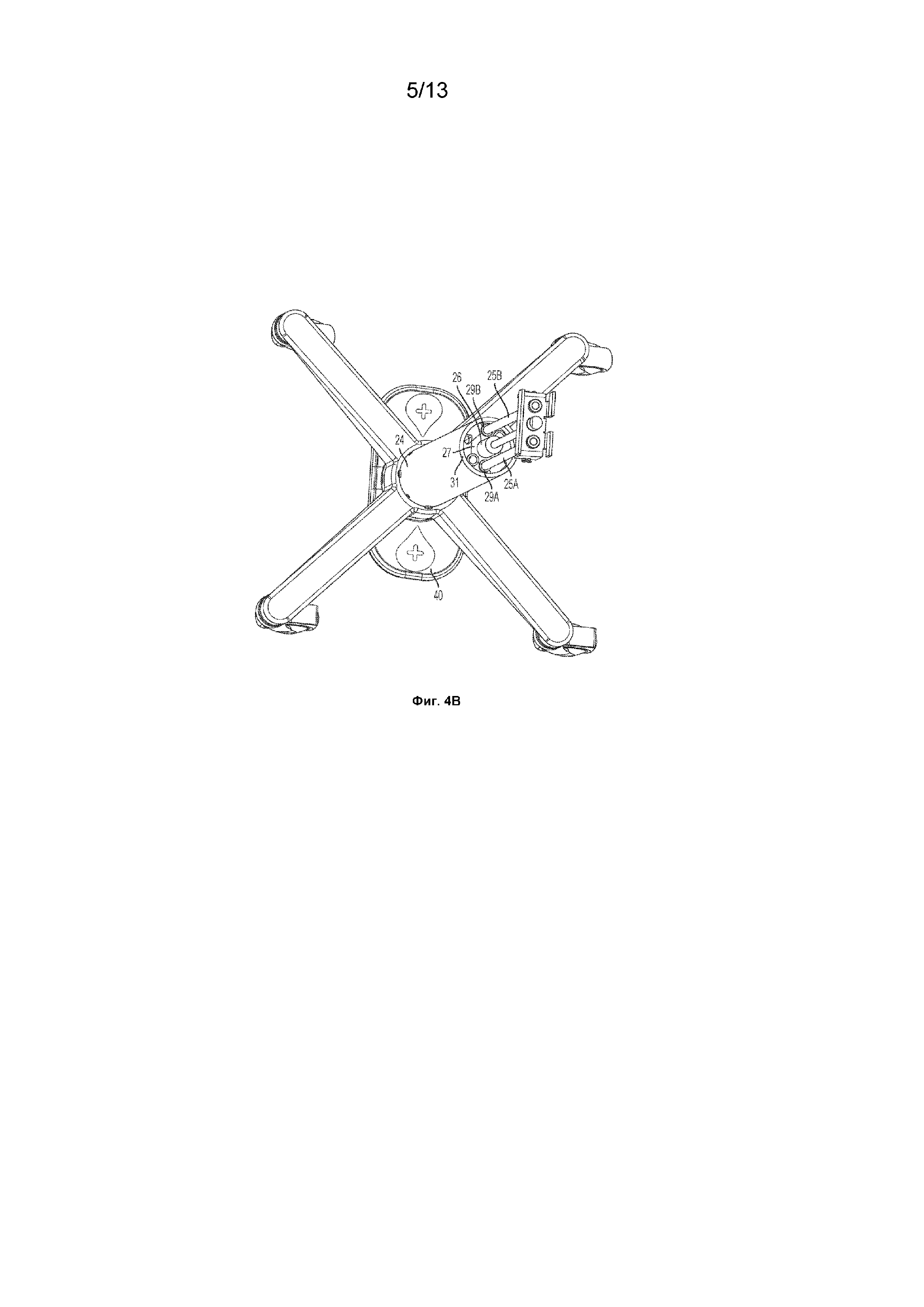
[0025] На фиг. 4В проиллюстрирован вид сверху в перспективе приведенной в качестве примера системы, проиллюстрированной по фиг. 1, показанный с убранной раковиной, с целью иллюстрирования приведенной в качестве примера конфигурации механизма регулирования высоты.
[0026] На фиг. 5 проиллюстрирована приведенная в качестве примера хирургическая простыня, которая может использоваться с системой, проиллюстрированной на фиг. 1-3.
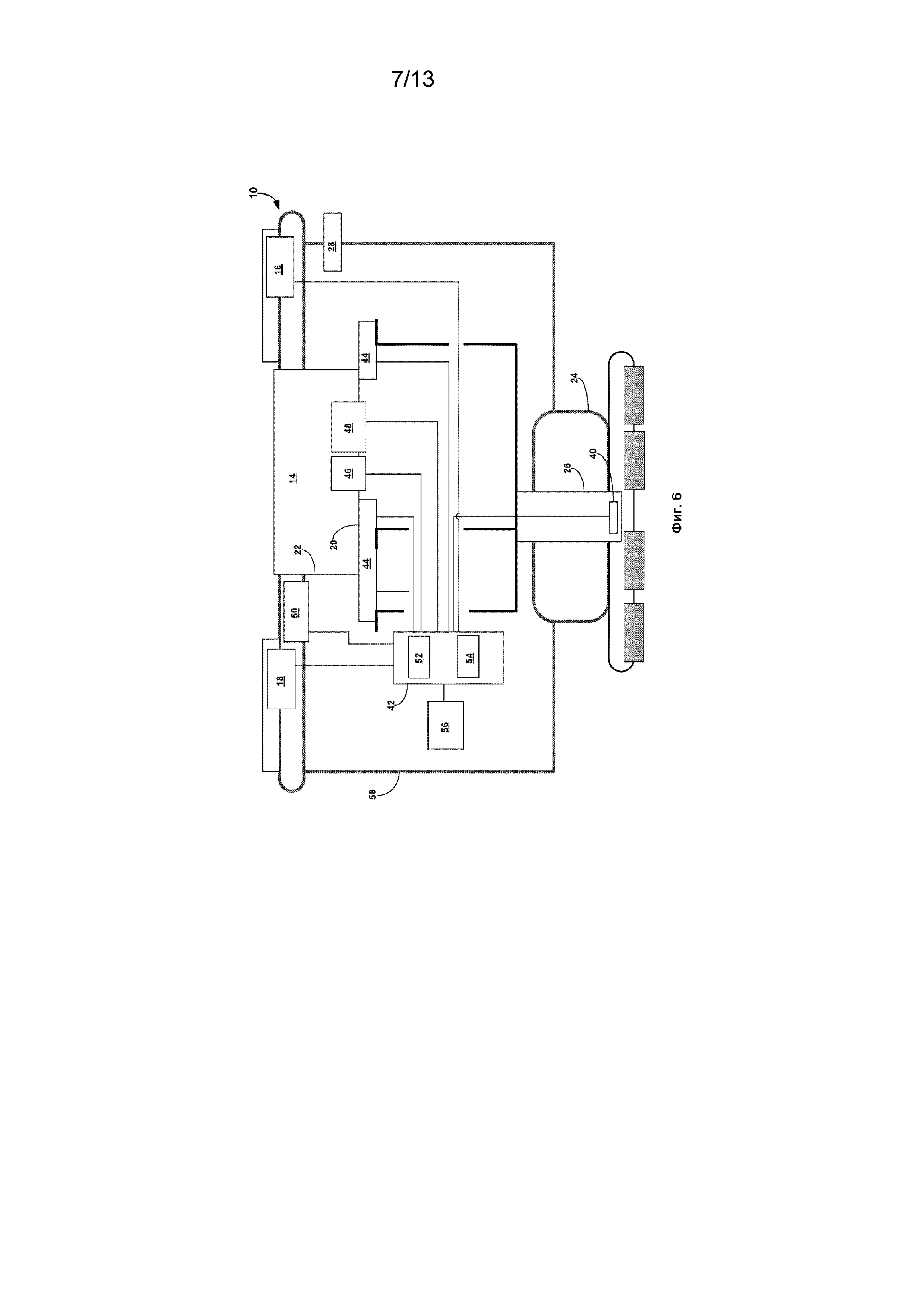
[0027] На фиг. 6 проиллюстрирована функциональная схема, иллюстрирующая компоненты, которые могут использоваться в приведенной в качестве примера системе, проиллюстрированной на фиг. 1-3.
[0028] На фиг. 7 проиллюстрирована блок-схема приведенного в качестве примера метода, который может использоваться для контроля количества хирургической жидкости, удаленной из устройства для термической обработки во время медицинской процедуры.
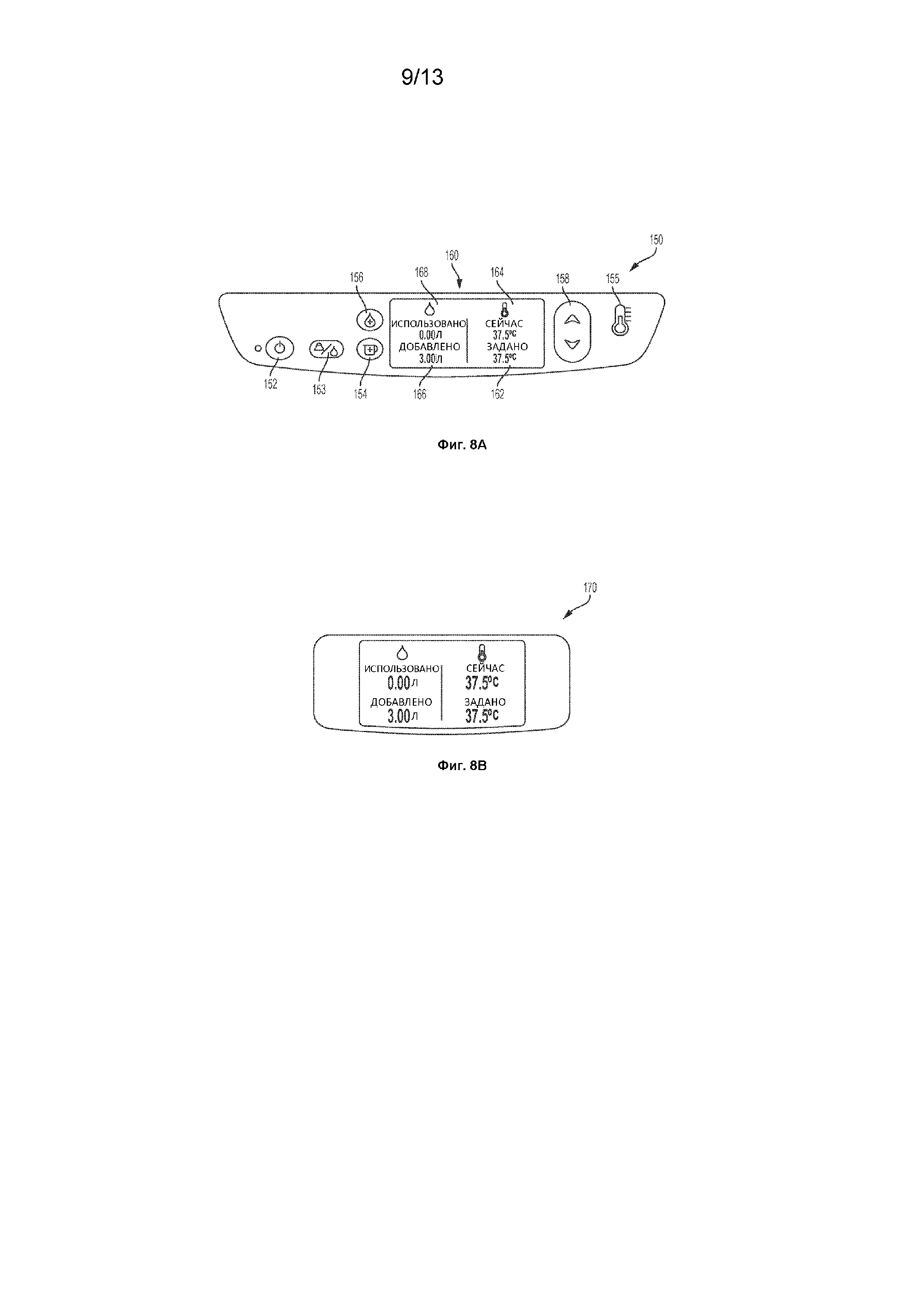
[0029] На фиг. 8A проиллюстрирован приведенный в качестве примера пользовательский интерфейс, который может использоваться в приведенной в качестве примера системе, проиллюстрированной на фиг. 1-3.
[0030] На фиг. 8B проиллюстрирован приведенный в качестве примера дисплей, который может использоваться в приведенной в качестве примера системе, проиллюстрированной на фиг. 1-3.
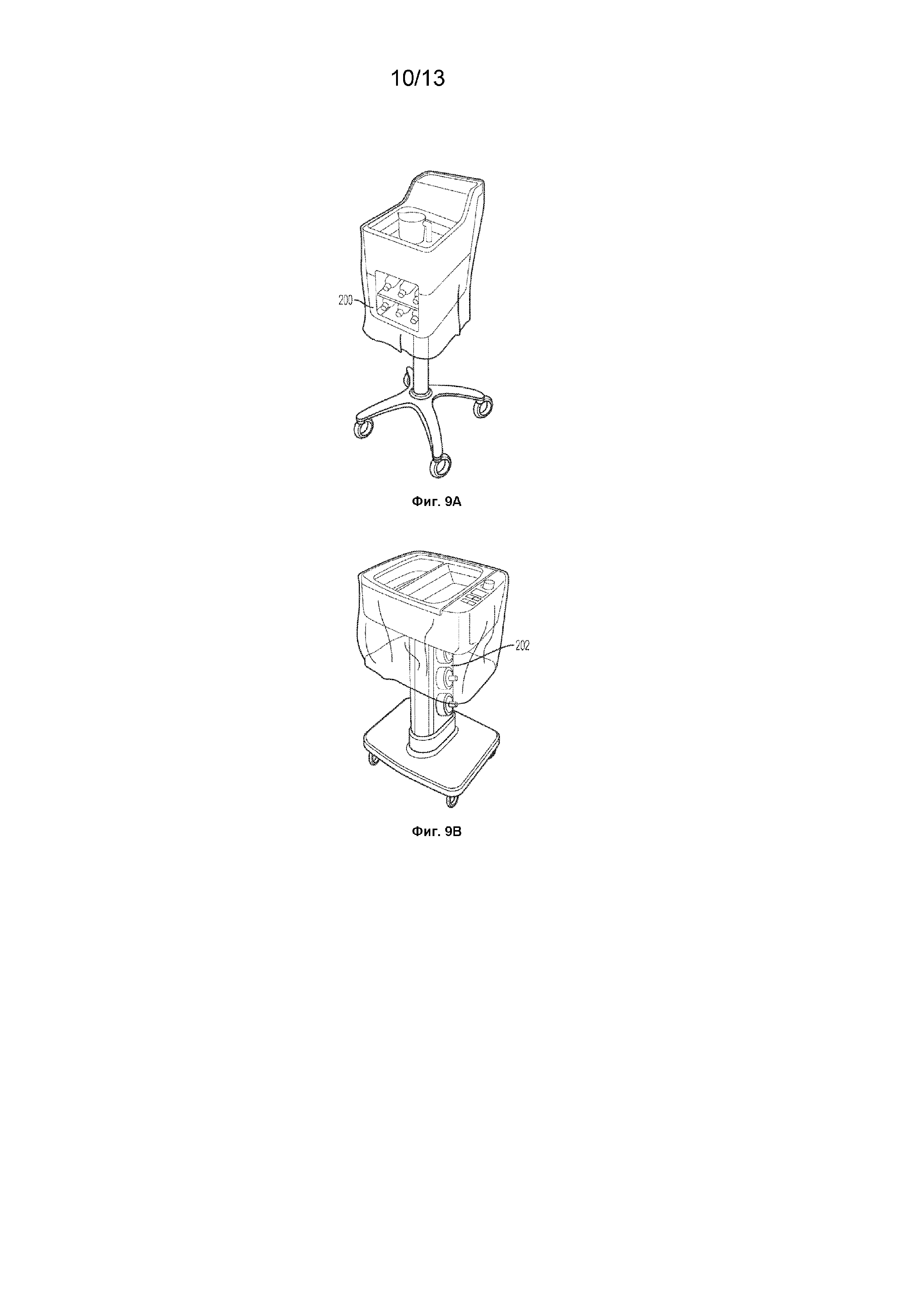
[0031] На фиг. 9А и 9В проиллюстрированы приведенные в качестве примера портативные конфигурации бутылок, которые могут использоваться в приведенной в качестве примера системе, проиллюстрированной на фиг. 1-3.
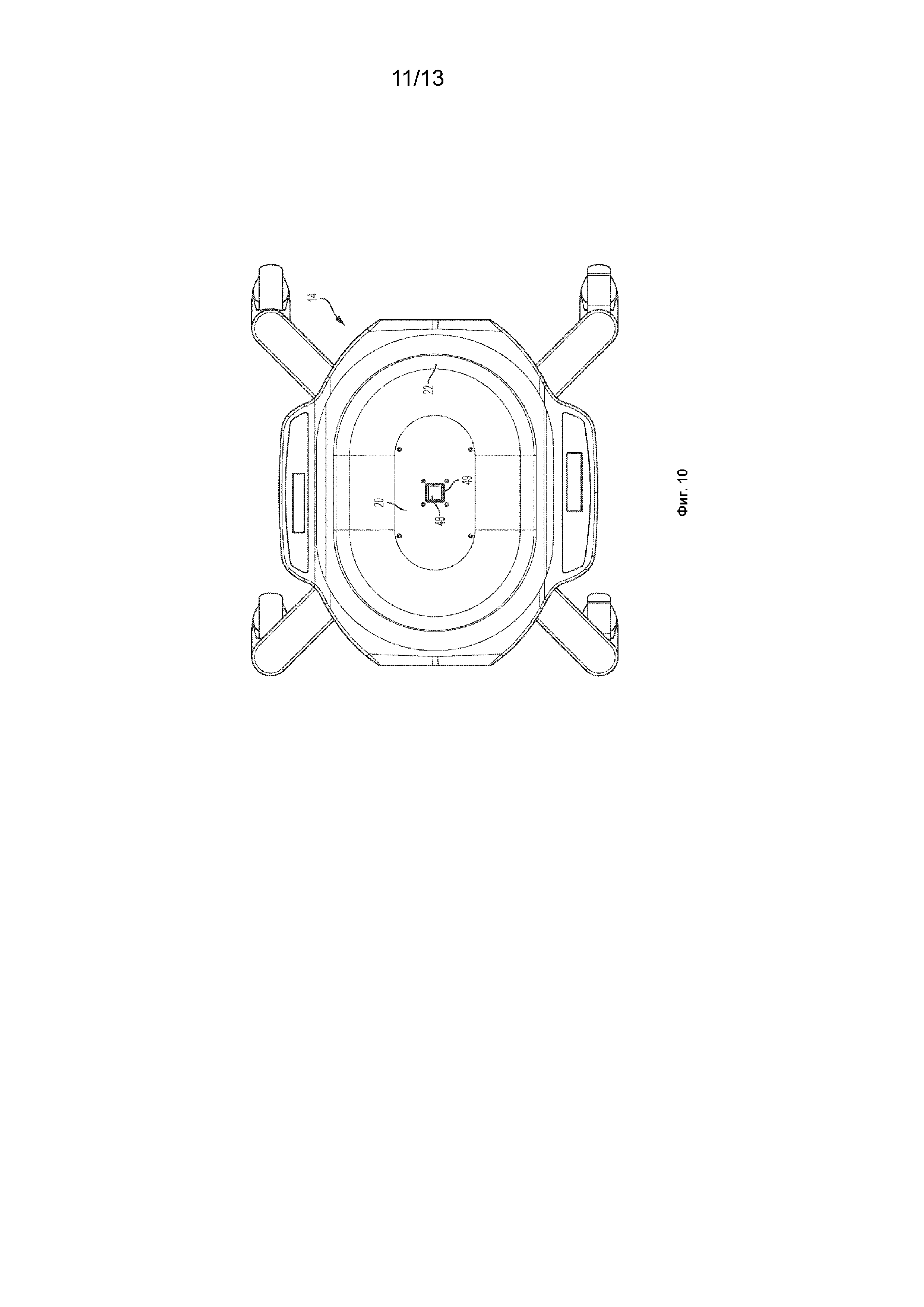
[0032] На фиг. 10 проиллюстрирован вид сверху приведенной в качестве примера системы, проиллюстрированной на фиг. 1, иллюстрирующий приведенное в качестве примера расположение датчика температуры.
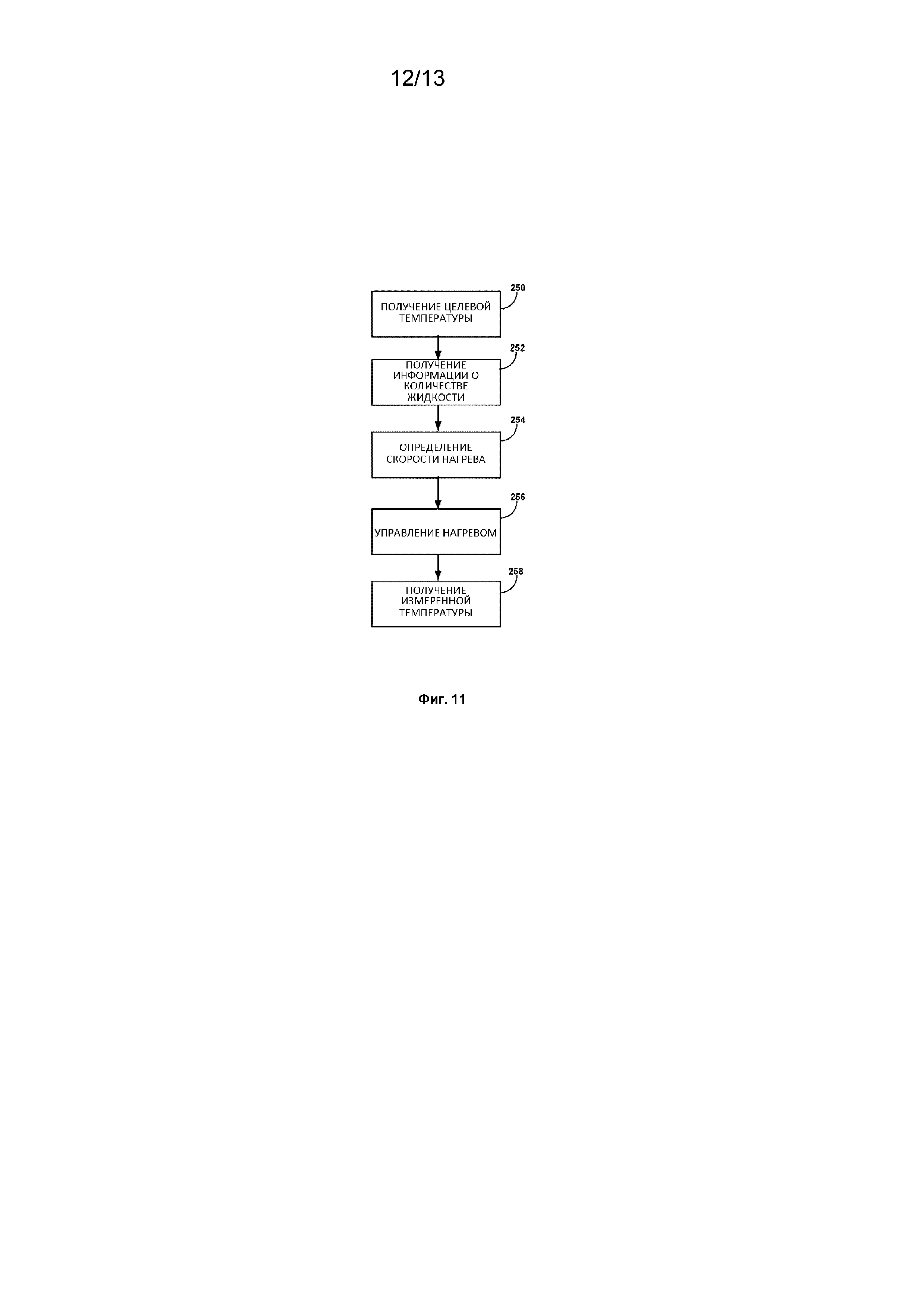
[0033] На фиг. 11 проиллюстрирована блок-схема, иллюстрирующая приведенный в качестве примера способ управления количеством тепловой энергии, которое должно быть подано в жидкость, нагретую в приведенной в качестве примера системе, проиллюстрированной на фиг. 1-3.
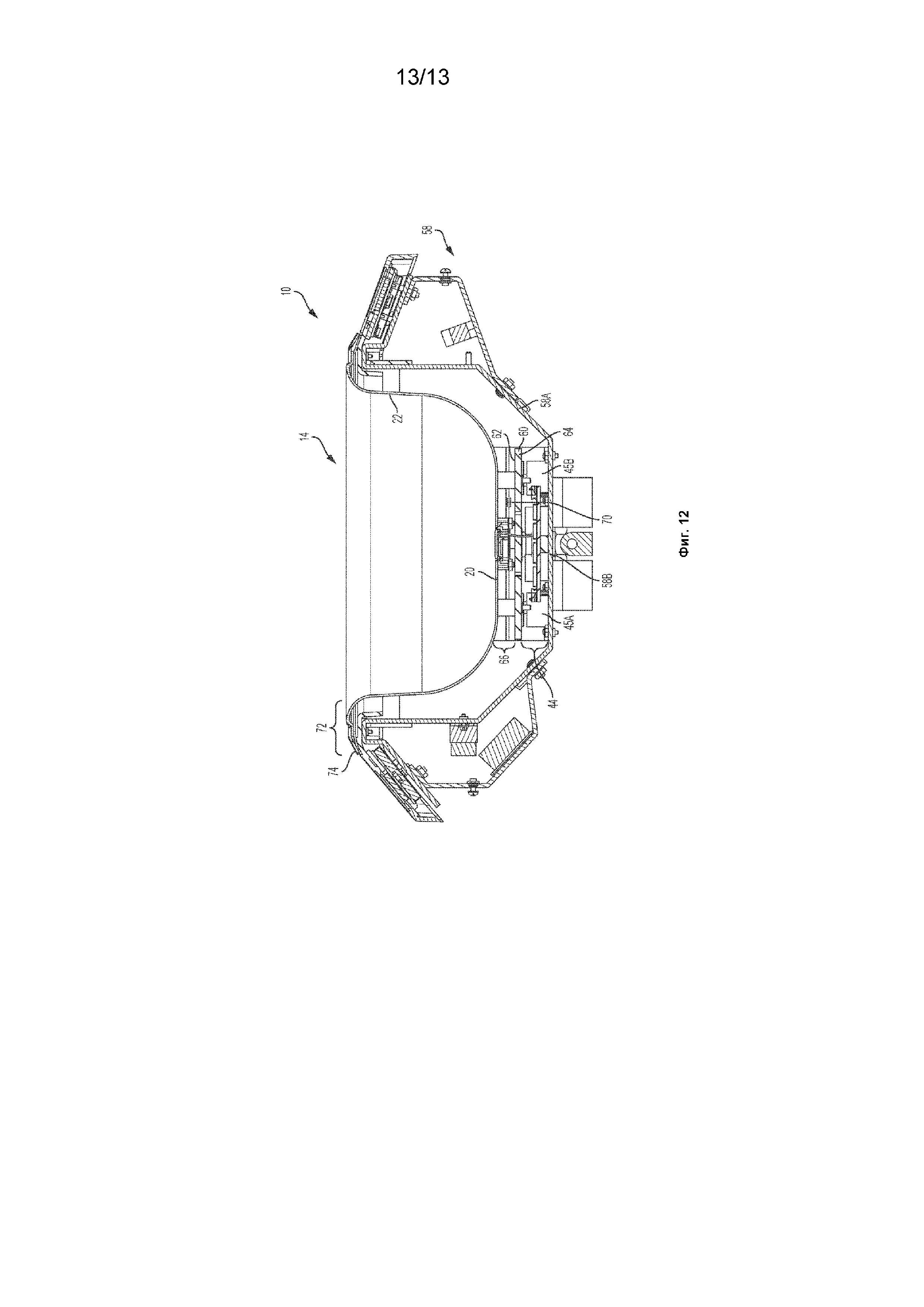
[0034] На фиг. 12 представлено изображение в разобранном виде в поперечном сечении, выполненном по линии сечения A-A, проиллюстрированной на фиг. 1, показывающее приведенное в качестве примера расположение компонентов.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0035] В общем, настоящее раскрытие изобретения относится к устройствам, системам и методам контроля и/или определения количества материала в хирургической среде и, при необходимости, регулирования температуры такого материала. В некоторых примерах система выполнена с возможностью термической обработки хирургической жидкости перед использованием жидкости во время медицинской процедуры. Температура хирургической жидкости может регулироваться внутри системы для повышения температуры выше температуры окружающей среды или снижения температуры ниже температуры окружающей среды. Система также может поддерживать температуру хирургической жидкости на уровне повышенной или пониженной температуры относительно температуры окружающей среды, пока хирургическая жидкость не будет готова к использованию во время процедуры. При использовании хирургическая жидкость может выводиться из системы и распределяться по участку хирургического вмешательства на или в теле пациента для орошения участка и смывания телесного вещества. Для извлечения из тела пациента хирургической жидкости вместе со смытым телесным веществом могут использовать аспирационную установку, благодаря чему предотвращается накопление хирургической жидкости в открытой полости пациента.
[0036] В некоторых примерах система термической обработки в соответствии с данным раскрытием изобретения контролирует количество хирургической жидкости, выводимой из системы. Принимая во внимание, что вся выведенная хирургическая жидкость, не возвращенная в систему, вводится пациенту, система может указывать количество хирургической жидкости, вводимой пациенту во время процедуры. В некоторых конфигурациях система содержит дисплей, который обновляется, по существу, в режиме реального времени и сообщает объем жидкости, выведенной из системы. Эта информация может быть полезной для предоставления руководства клиницистам, осуществляющим процедуру. Например, обладая информацией о количестве жидкости, вводимой пациенту во время процедуры, клиницист может подтвердить, что пропорциональное (например, равное) количество жидкости было выведено из тела пациента и собрано с использованием аспирационной установки. В качестве другого примера, клиницист может определить, что тело пациента подвергается чрезмерному орошению, на основании количества потребляемой хирургической жидкости и замедлить или прекратить дальнейшее орошение.
[0037] Система термической обработки в соответствии с настоящим раскрытием изобретения может иметь дополнительные или отличные характерные признаки для обеспечения безопасного и эффективного регулирования температуры хирургической жидкости. Например, система термической обработки может содержать считывающее устройство, выполненное с возможностью считывания информации, закодированной на хирургической простыне, вставленной в систему. Считывающее устройство может быть реализовано посредством бесконтактного считывающего устройства, такого как оптическое считывающее устройство, считыватель меток радиочастотной идентификации (RFID), считыватель меток ближней бесконтактной связи (NFC) или аналогичное бесконтактное устройство считывания. Устройство считывания может считывать информацию, закодированную или заложенную в хирургическую простыню, вставленную в систему. В случае, когда считывающее устройство не обнаруживает закодированную информацию на хирургической простыне, или в случае, когда не может быть подтверждена подлинность закодированной информации, система может запретить работу устройства для термической обработки. Это может содействовать обеспечению того, что в случае несовместимости материала, из которого изготовлена хирургическая простыня, с условиями работы системы (например, температурными условиями) система не будет продолжать работать. В качестве другого примера, считывающее устройство может обнаружить, использовалась ли уже хирургическая простыня, на основании информации, считываемой с хирургической простыни (например, также путем сравнения с сохраняемой информацией, идентифицирующей ранее используемые хирургические простыни), и не позволит системе работать, если хирургическая простыня уже использовалась (и поэтому, вероятно, не является стерильной).
[0038] На фиг. 1-3 проиллюстрированы соответственно вид в перспективе, вид спереди и вид сверху приведенной в качестве примера системы 10 термической обработки хирургической жидкости. В проиллюстрированном примере система 10 содержит основание 12 и раковину 14. Раковина 14 поддерживается и вертикально поднимается над основанием 12. Раковина 14 может предусматривать открытый резервуар, в который может дозированно подаваться хирургическая жидкость, или другой материал, находящийся в обработке. После добавления в раковину 14 может быть отрегулирована температура хирургической жидкости в раковине. Например, раковина 14 может находиться в тепловом контакте с устройством для термической обработки, которое может повышать или понижать температуру термальной жидкости. Раковина 14 также может поддерживать целевую температуру хирургической жидкости до тех пор, пока жидкость не будет удалена из раковины и не будет использована в этой процедуре.
[0039] Как описано более подробно ниже, система 10 может контролировать количество жидкости, добавляемой в раковину и/или удаляемой из раковины 14. Система 10 может, но не обязательно, также получать показания, когда нежидкостные компоненты, такие как медицинские инструменты, добавляются в раковину и/или удаляются из раковины 14. Во время процедуры клиницист может добавить свежую хирургическую жидкость в раковину 14, а также поместить в раковине один или более медицинских инструментов. Термины «свежая хирургическая жидкость» или «свежий материал» указывают на то, что жидкость или материал вводятся в раковину 14 впервые (например, из стерильного контейнера) и не являются жидкостью или другим материалом, который был удален из раковины и который повторно вводят обратно в раковину. Медицинскими инструментами могут быть хирургические инструменты, которые содержаться в условиях контролируемой температуры, прежде чем их вынимают из раковины 14 и вводят в тело пациента. В качестве дополнительного или альтернативного варианта, медицинскими инструментами могут быть приспособления для доставки хирургической жидкости из раковины 14 в тело пациента, такие как шприц с резиновым баллончиком и/или стерильная градуированная измерительная емкость.
[0040] Система 10 может определять, когда хирургическая жидкость удаляется из раковины 14, и отличать это от случаев, когда из раковины удаляют медицинские инструменты. Система 10 также может идентифицировать, когда свежая жидкость добавляется в раковину 14, и отличать это от случаев, когда в раковину добавляют медицинские инструменты. Затем система 10 может определить количество хирургической жидкости, удаленной из раковины 14 во время процедуры, исходя из количества жидкости, добавленной в раковину, и текущего объема хирургической жидкости в раковине. Система 10 может дополнительно определять, когда один или более медицинских инструментов были добавлены в раковину и/или удалены из раковины, чтобы определить количество хирургической жидкости, удаленной из раковины.
[0041] Чтобы позволить оператору взаимодействовать с системой 10 и управлять различными настройками, система 10 может содержать пользовательский интерфейс. В примере, проиллюстрированном на фиг. 1-3, система 10 содержит по меньшей мере один пользовательский интерфейс 16. Пользовательский интерфейс 16 может содержать устройство пользовательского ввода, через которое клиницист вводит информацию в систему 10, и устройство пользовательского вывода, из которого клиницист получает информацию из системы. Например, пользовательский интерфейс 16 может содержать одно или более манипулируемых устройств ввода, с которыми клиницист может взаимодействовать, чтобы регулировать настройки системы 10, предоставлять показание о добавлении свежей жидкости в раковину 14, предоставлять показание о добавлении нехирургических компонентов в систему или их удалении из системы 10 или тому подобное. Манипулируемое устройство пользовательского ввода может быть реализовано как физически нажимаемые кнопки (например, переключатели), части сенсорного экрана, с которыми может взаимодействовать клиницист, или другие функции, с которыми может взаимодействовать клиницист, для передачи информации в систему 10. Устройство пользовательского вывода пользовательского интерфейса 16 может быть дисплеем, который предоставляет графическую и/или текстовую информацию, касающуюся работы системы 10.
[0042] Хотя пользовательский интерфейс 16 проиллюстрирован как включающий в себя дисплей и одну или более кнопок, которых пользователь физически касается для взаимодействия с системой 10, система может содержать интерфейс любого типа, с которым пользователь может взаимодействовать для связи с системой. Например, система 10 может содержать микрофон, который улавливает звуки (например, звук жидкости, заливаемой в раковину 14) и/или звуковые команды от пользователя. В качестве другого примера система 10 может содержать оптический детектор, который обнаруживает действие пользователя (например, жидкость заливают в раковину 14, инструмент удаляют из раковины) и/или бесконтактную команду пользователя (например, жест пользователя, например размещение руки или бутылки с жидкостью перед оптическим датчиком). В случае реализации с возможностями оптического обнаружения система может содержать камеру, которая контролирует раковину 14 и/или окружающее пространство и выполняет методы распознавания изображений для обнаружения взаимодействия пользователя и/или команд с системой. В качестве еще одного примера система может содержать излучатель света, который обнаруживает, когда нарушается световой путь, такой как лазерный луч над отверстием раковины 14, чтобы обнаружить, когда материал добавляют в раковину и/или удаляют из раковины. В этой конфигурации система может определить, добавляется ли в раковину или удаляется ли из раковины 14 хирургическая жидкость или медицинский инструмент, на основании характеристик оптического отражения и свойств материала, добавляемого или удаляемого компонента. Система 10 может содержать пользовательские интерфейсы множества различных типов (например, работающие по принципу физического касания, звуковые, оптические), любой из которых может быть задействован пользователем, чтобы система могла определять информацию о содержании того, что добавляется в систему или удаляется из системы.
[0043] Кроме того, хотя в системе 10 на фиг. 1 проиллюстрирован пользовательский интерфейс, имеющий дисплей, физически установленный на раковине 14, следует понимать, что дисплей не обязательно должен быть физически прикреплен к системе и/или система может не иметь дисплей. Например, система 10 может содержать удаленное электронное устройство (например, компьютер, планшет, смартфон, сенсорный экран), которое физически отделено от раковины 14, но находится в беспроводной связи с раковиной, либо прямо, либо косвенно. Пользователь может взаимодействовать с удаленным электронным устройством для ввода параметров для управления раковиной 14 (например, целевой температуры, до которой жидкость должна быть нагрета) и/или может получать данные из раковины (например, данные, указывающие на объем жидкости, добавленной в раковину и/или удаленной из раковины, вес материала в раковине, заданную температуру и/или текущую температуру материала в раковине).
[0044] В дополнение к удаленному интерфейсу пользователя или вместо удаленного интерфейса 16 пользователя, через который пользователь может взаимодействовать с раковиной 14, раковина может быть выполнена с возможностью передачи данных, связанных с ее использованием, на удаленный компьютер. Например, раковина 14 может передавать данные, относящиеся к одному или более из: целевой температуры, на которую была установлена раковина во время процедуры, количества жидкости, добавляемой в раковину во время процедуры, количества жидкости, удаляемой из раковины во время процедуры, моментов времени, в которые один или более медицинских инструментов были добавлены в раковину и/или удалены из раковины, фактической температуры жидкости в раковине в течение всей процедуры и/или когда жидкость была удалена из раковины, и их комбинаций. Раковина 14 может передавать данные на удаленный компьютер через съемный носитель, предназначенный для долговременного хранения информации (например, флэш-накопитель, компакт-диск), через проводное соединение и/или через беспроводное соединение (например, протокол сотового телефона, протокол Bluetooth™, протокол Wi-Fi или другую радиочастоту). В некоторых примерах раковина 14 передает данные в сеть вычислений в облачной среде. Переданные данные могут включать или быть связаны с идентификацией пациента, соответствующей пациенту, для которого во время медицинской процедуры использовалась система 10. Посредством одного или более удаленных компьютеров данные из одной процедуры или агрегированные данные из множества процедур могут анализироваться для определения тенденций и возможностей для улучшения использования, например, для конкретного устройства или для множества устройств в рамках общей структуры собственности.
[0045] В вариантах применения, в которых система 10 содержит дисплей, система может быть выполнена с одним дисплеем или множеством дисплеев. На фиг. 1-3 система 10 проиллюстрирована как имеющая первый дисплей, который является частью пользовательского интерфейса 16, и второй дисплей 18. Первый дисплей расположен на внешней поверхности одной стороны раковины 14, а второй дисплей расположен на внешней поверхности, по существу, противоположной стороны раковины. Эта схема может быть полезна, чтобы позволить клиницистам, работающим с разных сторон раковины 14, видеть информацию о работе системы 10. В некоторых примерах второй дисплей 18 является частью пользовательского интерфейса, который имеет те же самые функции и функциональные возможности (например, устройство(а) пользовательского ввода и/или устройство(а) пользовательского вывода) в качестве первого пользовательского интерфейса 16. Это может позволить клиницисту представлять информацию системе и получать информацию из системы 10 при работе с любой стороны системы. В других примерах второй дисплей 18 может быть дисплеем, который предусматривает устройство пользовательского вывода, но не имеет элементов управления устройством пользовательского ввода. В этих вариантах применения клиницист может вводить информацию или команды через устройство(а) пользовательского ввода на пользовательском интерфейсе 16, но иметь возможность просматривать выходные данные на обоих дисплеях. Приведенный в качестве примера пользовательский интерфейс и конфигурации дисплея, которые могут использоваться в качестве пользовательского интерфейса 16 и/или дисплея 18, описаны в отношении фиг. 8А и 8В.
[0046] К тому же, хотя проиллюстрировано, что первый дисплей, являющийся частью пользовательского интерфейса 16, и второй дисплей 18 установлены под направленным вниз углом относительно самого верхнего края раковины 14, указанные дисплеи могут быть установлены под любым требуемым углом. Например, первый дисплей, являющийся частью пользовательского интерфейса 16, и второй дисплей 18 могут быть установлены под одним и тем же углом или под разными углами относительно раковины. В одном примере второй дисплей 18 установлен на системе под более острым углом (например, таким образом, что дисплей больше перпендикулярен земле), чем первый дисплей, обеспечивая большую видимость для пользователей, находящихся дальше от раковины. Кроме того, в то время как первый дисплей, являющийся частью пользовательского интерфейса 16, и второй дисплей 18 проиллюстрированы на противоположных внешних поверхностях раковины 14, один или оба дисплея могут быть расположены удаленно от раковины и соединены с ней с возможностью связи (например, для отображения информации, связанной с раковиной, хотя и не физически соединены с ней), как обсуждалось выше. Например, первый дисплей, являющийся частью пользовательского интерфейса 16, и/или второй дисплей 18 могут быть реализованы с использованием телевизионного или компьютерного монитора (например, в операционном наборе) на переносном устройстве, переносимом клиницистом (например, мобильном телефоне, планшетном компьютере) или иным образом физически отделены от раковины 14.
[0047] Система 10 термической обработки содержит раковину 14. Раковина 14 предусматривает резервуар, который принимает и удерживает хирургическую жидкость. В общем, раковина 14 может определять любую многоугольную (например, прямоугольную, квадратную, шестиугольную) или дугообразную (например, круговую, эллиптическую) форму или даже комбинации многоугольной и дугообразной форм. В проиллюстрированном примере раковина 14 показана в виде общей овальной формы и содержит дно 20 и по меньшей мере одну наклонную боковую стенку 22, проходящую вертикально вверх от дна. Дно 20 и наклонная боковая стенка 22 совместно образуют ограниченную полость с открытой верхней поверхностью, которая принимает и удерживает хирургическую жидкость. Конфигурирование раковины 14 с наклонной боковой стенкой (наклонными боковыми стенками) вместо прямых боковых стенок помогает предотвратить накопление хирургической жидкости в углах, в которых боковая стенка (боковые стенки) пересекается с дном. При этом в других примерах раковина 14 может быть образована с прямыми боковыми стенками. Кроме того, в то время как раковина 14 проиллюстрирована как имеющая открытую верхнюю поверхность для добавления материала в раковину и отвода материала из раковины, раковина может быть закрыта сверху своей верхней поверхности в других конфигурациях.
[0048] Кроме того, хотя раковина 14 проиллюстрирована как имеющая один резервуар для хранения медицинской жидкости, раковина может быть образована с несколькими резервуарами, отделенными друг от друга. Например, раковина 14 может представлять собой одну полость с внутренней перегородкой (внутренними перегородками) или разделителем (разделителями), отделяющими одну или более полостей резервуара от сообщения по текучей среде с одной или более другими полостями резервуара. В качестве альтернативного варианта, раковина 14 может быть выполнена с несколькими полостями (например, каждая из них отдельно сформована или образована), причем каждая из них обеспечивает отдельный резервуар для приема и удерживания жидкости. При использовании каждая полость может быть заполнена той же жидкостью или по меньшей мере одна полость может быть заполнена жидкостью, отличной от жидкости, заполняющей по меньшей мере одну другую полость. К тому же, в некоторых конфигурациях каждая полость может быть обеспечена отдельным устройством для термической обработки, что позволяет осуществлять независимое регулирование температур различных полостей. Это может быть полезно, например, для нагревания жидкости в разных полостях до разных температур, нагревания жидкости в одной полости, при одновременном охлаждении жидкости в другой полости для создания жижицы или иным образом обеспечении гибкости регулирования температуры.
[0049] Во время процедуры может вводиться в раковину и удаляться из раковины 14 любой тип материала, включая любой тип хирургической жидкости во время медицинской процедуры. Приведенные в качестве примера типы медицинской жидкости, которые могут использоваться во время медицинской процедуры, включают воду, физиологический раствор и т. п. Хирургическая жидкость может включать или может не включать лекарственное средство, такое как лекарственные препараты, обеспечивающие антибактериальные свойства, свойства антикоагуляции/коагуляции, свойства анестезии или тому подобное. Альтернативные материалы, которые могут быть введены в раковину 14, могут включать медицинский образец, извлеченный из тела пациента для взвешивания (например, в вариантах реализации изобретения, в которых раковина выполнена с возможностью измерения веса), кровь, тромбоциты или материалы для терморегулирования перед их введением пациенту, или материалы не медицинского назначения (например, в вариантах применения, в которых система 10 не используется в медицинской среде).
[0050] В конфигурации, проиллюстрированной на фиг. 1-3, раковина 14 поддерживается и вертикально приподнята над основанием 12. В частности, раковина 14 установлена на удлиненном корпусе 24, который проходит вертикально вверх от основания 12. Основание 12 и корпус 24 могут поднимать раковину 14 в положение, в котором клиницисту удобно взаимодействовать с раковиной. В некоторых примерах корпус 24 содержит одну или более приемных полостей, которые выполнены с возможностью приема емкостей с хирургической жидкостью. Например, корпус 24 может содержать одну или более ниш, расположенных вдоль длины корпуса, в которые могут быть вставлены емкости с хирургической жидкостью. Ниши могут нагреваться или могут не нагреваться, чтобы представить предварительно нагретую хирургическую жидкость. В любом случае ниши могут хранить емкость(и) с хирургической жидкостью для свободного доступа во время медицинской процедуры. В случае, когда во время процедуры требуется дополнительная хирургическая жидкость, клиницист может извлечь емкость со свежей хирургической жидкостью из ниши в корпусе 24 и добавить хирургическую жидкость в раковину 14. Например, на фиг. 9А проиллюстрирована система термической обработки, имеющая нишу 200 для бутылок, образованную в корпусе, определяющем раковину 14. На фиг. 9В проиллюстрирована другая система термической обработки, имеющая нишу 202 для бутылок, образованную вдоль длины корпуса. Такие конструкции ниши для бутылок могут использоваться в системе 10 термической обработки, проиллюстрированной на фиг. 1-3.
[0051] В некоторых примерах раковина 14 находится на фиксированной высоте относительно основания 12 и/или поверхности (например, пола, счетчика, верхней поверхности стола), на которой установлена система 10. В других примерах система 10 содержит механизм регулирования высоты, который выполнен с возможностью регулирования высоты раковины 14 относительно основания 12. Это может быть полезно, чтобы позволить клиницистам переместить раковину 14 с различных высот на удобную рабочую высоту. На фиг. 4А проиллюстрирован вид в сечении системы 10, проиллюстрированной фиг. 1, выполненный по линии сечения A-A, проиллюстрированной на фиг. 1, показывающий приведенный в качестве примера механизм регулирования высоты.
[0052] Как проиллюстрировано в примере на фиг. 4А, система 10 содержит механизм регулирования высоты, который выполнен с поршнем 26 и регулировочным рычагом 28 (фиг. 1). Поршень 26 может содержать скользящий вал, расположенный в камере, содержащей сжимаемую жидкость (например, газ, жидкость) или пружину. Скользящий вал можно перемещать посредством давления жидкости или пружины для подъема раковины 14, и оператор может продвигать раковину 14 в направлении вниз для опускания раковины, а также заставлять скользящий вал двигаться против давления жидкости или пружины. Регулировочный рычаг 28 может управлять положением поршня 26 и, соответственно, положением раковины 14. Например, регулирующий рычаг 28 может открывать и закрывать клапан, который управляет движением жидкости к поршню 26, и/или перемещать стопор внутрь и из фиксирующего отверстия. Регулировочный рычаг 28 может быть расположен в качестве ручного управления, как проиллюстрировано на фиг. 1, или может быть выполнен как педальное управление. В других конфигурациях, в которых система 10 имеет механизм регулирования высоты, механизм регулирования высоты может быть выполнен с использованием вращающейся фиксирующей муфты, которая управляет положением двух скользящих валов относительно друг друга.
[0053] Установка раковины 14 с возможностью перемещения посредством механизма регулирования высоты может быть полезным для обеспечения возможности перемещения раковины на разные высоты, например, в зависимости от роста оператора, использующего раковину, и пространственных ограничений в среде, в которой используется раковина. На практике в вариантах применения, в которых раковина 14 установлена над поршнем 26, раковина может поворачиваться в горизонтальной плоскости, если иным образом не ограничена в движении. Такое ограничение может исходить из конфигурации поршня 26, имеющего определённый диапазон поворота. Однако, когда раковина 14 находится на определенной максимальной высоте, жидкость, находящаяся в раковине, может привести к смещению центра тяжести, и раковина может иметь тенденцию нежелательно покачиваться или колебаться в горизонтальной плоскости. Такое раскачивание или колебание может привести к тому, что жидкость, находящаяся в раковине 14, прольется из раковины при слишком сильном раскачивании или колебании. Чтобы содействовать ограничению непреднамеренного вращательного движения раковины 14, система 10 может иметь одну или более противовращательных функций, которые могут препятствовать вращению раковины.
[0054] На фиг. 4В проиллюстрирован вид сверху в перспективе системы 10 (проиллюстрированной с раковиной 14, удаленной с целью иллюстрации), показывающий приведенную в качестве примера конфигурацию механизма регулирования высоты с противовращательной конфигурацией. В этом примере поршень 26 установлен в пределах центрального просвета корпуса 24 между основанием 12 и раковиной 14. Кроме того, механизм регулирования высоты содержит по меньшей мере один противовращательный стержень, который проиллюстрирован как выполненный с использованием двух противовращательных стержней 25А, 25В. Противовращательные стержни 25А, 25В проходят параллельно поршню 26 и находятся на разных сторонах поршня. Противовращательные стержни 25А, 25В могут проходить частично и в некоторых примерах полностью вдоль длины корпуса 24 и могут быть подняты и опущены поршнем 26. Например, противовращательные стержни 25А, 25В могут быть неподвижно соединены на одном конце (например, на своих верхних концах к раковине 14) и могут проходить через неподвижный противоположный элемент и/или выдвигаться в рабочее положение на своих противоположных концах. При такой конфигурации противовращательные стержни 25А, 25В могут подниматься и опускаться с раковиной 14 и поршнем 26 и могут противодействовать вращательному моменту, прилагаемому к раковине 14, уменьшая или устраняя любое вращательное движение раковины.
[0055] В других конфигурациях механизм для регулирования высоты может содержать два компонента, перемещаемых относительно друг друга, которые взаимосвязаны с конфигурацией фиксирующих выступов и пазов. Например, корпус 24 и/или поршень 26 могут содержать один элемент, соединенный с основанием 12, и второй элемент, соединенный с раковиной 14, причем оба элемента выполнены с возможностью скольжения относительно друг друга. Обеспечение скользящего и взаимосвязанного соединения между фиксирующими выступами и пазами между обоими элементами может помочь свести к минимуму поворачивание раковины 14.
[0056] Для размещения различных компонентов, расположенных в корпусе 24 и/или проходящих от основания 12 до раковины 14, просвет, образованный корпусом 24, может содержать одно или более отверстий, через которые проходят компоненты в корпусе. В примере, проиллюстрированном на фиг. 4В, корпус 24 определяет первый просвет 27, через который вставлен поршень 26, один или более вторичных просветов 29А, 29В, через которые вставлены один или более противовращательных стержней 25А, 25В, и необязательный третий просвет 31, через который может быть вставлена проводка. Третий просвет 31 может быть выполнен в виде короба проводки, который позволяет кабелю связи проходить от раковины 14 до нижней части корпуса 24 и/или основания 12.
[0057] Например, как описано более подробно ниже, система 10 может содержать педальное приводное устройство 40. Для отправки и/или приема сигналов между педальным приводным устройством 40 и раковиной 14 (например, контроллером, установленным в корпусе раковины) система 10 может содержать коммуникационный кабель (например, электрический кабель, оптический кабель), проходящий от педального приводного устройство к раковине. Кабель может иметь длину, достаточную для того, чтобы пройти от педального приводного устройства до раковины, когда раковина находится в максимально поднятом положении. Кабель может иметь секции обмотки (например, микротелефонный, или спиральный, шнур) для содействия выдвижению и втягиванию шнура при поднятии или опускании раковины 14. В качестве другого примера, кабель может выдвигаться из корпуса втягивания, благодаря чему кабель вытягивается из корпуса и втягивается в корпус, когда раковина соответственно поднимается и опускается. В любом случае конфигурирование корпуса 24 с проводным просветом, физически отделенным от поршня 26 корпуса с просветом, может быть полезным для предотвращения его защемления, излома или повреждения поршнем 26, когда раковина 14 поднимается и/или опускается. В некоторых примерах различные просветы, на которые разделен корпус 24, удлиняют длину корпуса 24. В других примерах корпус 24 содержит одну или более разделительных пластин для определения просветов, в то время как пространство выше и/или ниже одной или более разделительных пластин не разделено.
[0058] Независимо от конкретной конфигурации механизма регулирования высоты механизм регулирования высоты может быть выполнен с возможностью расположения раковины в диапазоне подъема на высоте от 61 см до 152 см (24 дюймов до 60 дюймов). Например, механизм регулирования высоты может позволить оператору регулировать верхнюю поверхность раковины 14, фиксируя ее на любой требуемой высоте, включая высоты в диапазоне от 91 см до 122 см (36 дюймов до 48 дюймов). Механизм регулирования высоты (например, поршень в случае использования) может обеспечить усилие, достаточное для подъема веса по меньшей мере 5 кг, например, от 7 кг до 15 кг, во всем диапазоне хода.
[0059] Основание 12 поддерживает систему 10, например, на полу процедурного кабинета, на столе, на столешнице. В конфигурации, проиллюстрированной на фиг. 1-3, основание 12 установлено на колесах 33 таким образом, чтобы перемещаться из одного места в другое. Одно или более колес могут быть выполнены с возможностью блокировки для предотвращения перемещения основания 12, когда оно расположена в требуемом месте. В других примерах основание 12 не содержит колеса 33. Кроме того, хотя основание 12 проиллюстрирована как физически отделенная от раковины 14 и соединенная с ней через корпус 24 и поршень 26, в других примерах раковина 14 и основание 12 могут быть физически объединены вместе для образования единой конструкции. Поэтому следует понимать, что основание 12 не обязательно должно быть конструкцией, физически отделенной от раковины 14, а может быть частью конструкции раковины, которая опирается на опорную поверхность. Соответственно, основание 12 не обязательно должно быть выполнено с выступающими наружу перекладинами, а может представлять собой опорную конструкцию любого типа, которая образует основание для раковины 14. В некоторых примерах система 10 может не содержать основание 12.
[0060] Для питания системы 10, включая устройство для термической обработки, которое контролирует температуру хирургической жидкости, размещенной в раковине 14, система может иметь шнур питания, который подключается к сети электропитания/блоку питания розеточного типа. Для управления шнуром питания, когда он не используется, система 10, проиллюстрированная на фиг. 1-3, содержит конструкцию изолирующей обмотки шнура. В частности, иллюстрированная система содержит пару продольно разнесенных крючков 30, выполненных с возможностью приема шнура питания, обернутого вокруг них. В других конфигурациях система 10 может содержать подпружиненное устройство втягивания, которое автоматически втягивает шнур питания в камеру удержания шнура питания. В дополнение к использованию или вместо использования шнура питания для подачи питания с блока питания розеточного типа в систему 10 данная система может содержать внутреннюю батарею для питания функциональных элементов системы. При такой конфигурации может быть предусмотрена одна или более внутренних батарей, которые могут быть или могут не быть перезаряжаемыми и/или заменяемыми. При использовании батарея может быть основным источником питания для электропитания системы 10 или же может функционировать в качестве резервного источника питания в том случае, когда основной источник питания (например, блок питания розеточного типа) не работает.
[0061] Поскольку система 10 может быть развернута в разных географических регионах по всему миру, система может содержать электрическую схему для функционирования на различных источниках энергии. Например, система может работать под напряжением в 110 вольт в некоторых странах и под напряжением в 220 вольт в других странах. Чтобы настроить систему 10 как универсальное устройство, которое может работать под любым напряжением, которое может подаваться от настенной розетки в местной стране, в которой система может быть развернута, данная система может содержать соответствующую электрическую схему. В некоторых примерах система 10 содержит трансформатор, который скачкообразно изменяет напряжение, полученное от настенной розетки, вверх или вниз до соответствующего напряжения для работы системы 10, например, включая указанной в настоящем документе устройство для термической обработки. В других примерах система 10 может содержать интегральную схему измерения напряжения, которая определяет напряжение от настенной розетки, к которой подключено устройство, и подает управляющий сигнал для управления электрической работой устройства. Управляющий сигнал от интегральной схемы может привести к включению или выключению одного или более токопроводов. Например, когда интегральная схема обнаруживает высокое напряжение (например, 220 В), электричество может подаваться по параллельным токопроводам на устройство для термической обработки. И напротив, когда интегральная схема обнаруживает более низкое напряжение (например, 110 В), электричество может подаваться по последовательному токопроводу на устройство для термической обработки. Соответственно, система 10 и устройство для термической обработки в ней могут работать под любым напряжением, подаваемым без необходимости или без трансформатора. Отсутствие трансформатора может существенно снизить вес системы по сравнению с системой, в которой содержится трансформатор.
[0062] При использовании клиницист может подавать свежую стерильную хирургическую жидкость в раковину 14 для подготовки к последующему использованию хирургической жидкости во время медицинской процедуры. В то время как хирургическая жидкость может быть подана непосредственно в раковину 14, клиницист может вместо этого вставить стерильную хирургическую простыню в раковину 14 перед подачей хирургической жидкости в покрытую хирургической простыней раковину. Стерильная хирургическая простыня может быть одноразовой прокладочной тканью, которая создает стерильную зону, с которой может контактировать хирургическая жидкость и другие стерильные медицинские компоненты. Хирургическая простыня может отделить стерильную зону от нестерильной зоны.
[0063] В случае использования одноразовая хирургическая простыня может быть изготовлена из материала, который непроницаем для хирургической жидкости и достаточно гибкий, чтобы ложиться по форме стенок раковины 14. Хирургическая простыня может быть подогнана или не подогнана по размеру и/или форме. Подогнанная хирургическая простыня может быть выполнена таким образом, что хирургическая простыня формируется по контуру раковины 14 (например, соответствует размеру и/или форме раковины). Не подогнанная хирургическая простыня может быть плоской или плиссированной и иметь длину, достаточную для размещения на раковине 14. В любом случае хирургическая простыня может быть помещена в раковине 14 таким образом, чтобы приобрести форму стенок раковины. В некоторых примерах хирургическая простыня также простирается по стенкам раковины 14, например, свисая параллельно корпусу 24. Кроме того, в некоторых примерах хирургическая простыня может иметь внутреннюю(ие) перегородку(и) или разделитель(и), образующий(е) одну или более полостей емкости, которые отделены от гидравлического сообщения с одной или более другими полостями емкости. При такой конфигурации хирургическая простыня может преобразовать одну полость для жидкости в раковине 14 в несколько полостей для жидкости.
[0064] Одноразовая хирургическая простыня, используемая в раковине 14, может иметь толщину, достаточную для того, чтобы противодействовать разрыву и прокалыванию во время нормального использования, а также должна быть достаточно тонкой, чтобы обеспечить эффективную теплопередачу через хирургическую простыню. Хотя одноразовая хирургическая простыня может быть изготовлена из любых подходящих материалов, в некоторых примерах хирургическая простыня изготовлена из полимерного материала (например, полиэтилена, полипропилена, полистирола, полиуретана). Хирургическая простыня (или ее часть) может быть прозрачной или полупрозрачной, чтобы оператор мог видеть функциональные элементы, покрытые хирургической простыней.
[0065] В одном конкретном варианте применения одноразовая хирургическая простыня, используемая в системе 10 и в раковине 14, представляет собой термоформованную полимерную хирургическую простыню. Термоформованная хирургическая простыня может быть образована путем нагревания пластикового листа до температуры, при которой пластиковый лист становится податливой, а затем приобретает форму пластикового листа, который имеет размеры (например, размер и форму) раковины 14. При охлаждении термоформованная хирургическая простыня сохранит заданную форму и, соответственно, форму раковины 14. В зависимости от толщины используемого пластикового листа полученная термоформованная хирургическая простыня может быть жесткой или полужесткой. Например, полужесткая хирургическая простыня может поддерживать профиль размера и формы раковины 14, но обладать гибкостью, которая позволяет закрыть простыней изгибы. Термоформованная хирургическая простыня может казаться клиницисту более крепкой и более надежной, чем простая гибкая хирургическая простыня из пластикового листа, и поэтому может быть желательной из-за очевидной устойчивости к прокалыванию.
[0066] Как кратко упомянуто выше, хирургическая простыня, используемая в системе 10, может содержать машиночитаемую информацию, которая идентифицирует хирургическую простыню. Когда хирургическая простыня размещается на раковине 14, машиночитаемая информация может считываться устройством считывания системы 10 для определения того, подходит ли хирургическая простыня для использования в системе. Это может предотвращать использование в системе 10 ненадлежащих хирургических простыней, таких как хирургические простыни, которые не обладают соответствующими характеристиками прочности или термического сопротивления. Например, хирургическая простыня может содержать информацию, которую можно считывать посредством оптического или электромагнитного считывающего устройства для определения того, разрешено ли использовать хирургическую простыню в системе 10.
[0067] В некоторых конфигурациях в соответствии с этим примером хирургическая простыня содержит метку, в которой закодирована машиночитаемая информация. метка может быть прикреплена к поверхности хирургической простыни или вставлена в хирургическую простыню (например, запаяна между различными слоями полимерного материала). метка может содержать информацию, идентифицирующую хирургическую простыню, такую как код или производственный номер (например, номер партии или единицы), наименование производителя, дата изготовления и тому подобное. В некоторых конфигурациях метка выполнена как бесконтактная метка, информацию которой можно считать, если поднести метку ближе к считывающему устройству системы 10, без необходимости физического контакта метки со считывающим устройством. Может быть полезно позволить клиницисту разместить метку в непосредственной близости от соответствующего считывающего устройства, просто разместив хирургическую простыню в раковине 14 без необходимости в дальнейшем размещении метки. Хотя может использоваться любой тип меток, подходящий для использования с бесконтактным считывающим устройством, в некоторых примерах хирургическая простыня, используемая в системе 10, содержит метку радиочастотной идентификации (RFID) или метку ближней бесконтактной связи (NFC).
[0068] На фиг. 5 проиллюстрирована приведенная в качестве примера хирургическая простыня 35, которая может использоваться в системе 10, проиллюстрированной на фиг. 1-3. В проиллюстрированном примере хирургическая простыня 35 содержит жесткий или полужесткий участок 32 емкости, который вставляется в раковину 14 и соответствует размеру и форме раковины. Участок 32 емкости имеет обод 34, который проходит вокруг и по меньшей мере по части края раковины 14, что, например, позволяет хирургической простыне зафиксироваться или зацепиться на ободе раковины. В разных примерах обод 34 может быть выполнен в виде фрикционной посадки на краю раковины 14 или может содержать механические элементы зацепления, которые фиксируются на краю/внутрь края раковины, предотвращая случайное вытеснение хирургической простыни 35 из раковины 14. Чтобы клиницист мог иметь обзор и взаимодействовать с системой 10, хирургическая простыня 35 может содержать физические вырезы или прозрачные отверстия 37, которые выполнены с возможностью размещения над пользовательским интерфейсом 16 и дисплеем 18.
[0069] Кроме того, в примере, проиллюстрированном на фиг. 5, хирургическая простыня 35 дополнительно содержит фартук 36 и метку 38, содержащую информацию, идентифицирующую хирургическую простыню 35. Фартук 36 соединен с ободом 34 и свисает через край раковины 14. Фартук 36 может быть выполнен из гибкого материала, такого как гибкий пластик, который связан с участком 32 термоформованной емкости. Метка 38 может содержать машиночитаемую информацию (например, закодированную в машиночитаемой памяти, которая является частью метки 38). Метка 38 расположена на хирургической простыне 35 таким образом, что при размещении хирургической простыни на раковине 14 метка находится в достаточно непосредственной близости, чтобы ее информация считывалась соответствующим считывающим устройством системы 10. Хотя на фиг. 5 проиллюстрирована одна приведенная в качестве примера конфигурация хирургической простыни в соответствии с настоящим раскрытием изобретения, могут использоваться другие конфигурации хирургических простыней, описанные в настоящем документе, и должно быть понятно, что настоящее раскрытие изобретения не ограничено в этом отношении.
[0070] С дальнейшей ссылкой на систему 10, проиллюстрированную на фиг. 1-3, приведенное в качестве примера устройство для термической обработки содержит педальное приводное устройство 40. Обычно медицинские операции выполняются в операционной или в другом медицинском блоке посредством различного стерильного и нестерильного медицинского персонала. Термин «стерильный персонал» относится к персоналу, который принял необходимые меры предосторожности, которые позволяют ему взаимодействовать с объектами в стерильной зоне, не загрязняя эту зону, в то время как термин «нестерильный персонал» относится к персоналу, который не принял такие меры предосторожности и может загрязнять стерильную зону. Поскольку система 10 термической обработки обрабатывает стерильную хирургическую жидкость в стерильной зоне во время медицинской процедуры, для работы системы обычно требуется стерильный персонал.
[0071] Конфигурирование системы 10 термической обработки посредством педального приводного устройства 40 может быть полезно для обеспечения альтернативного механизма для взаимодействия с системой. В некоторых примерах педальное приводное устройство 40 может функционировать в качестве устройства пользовательского ввода, которое может использовать клиницист в дополнение к пользовательскому интерфейсу или вместо пользовательского интерфейса 16 для ввода информации в систему 10. Например, клиницист может нажимать на педальное приводное устройство 40 для предоставления показания системе 10 о том, что в раковину 14 добавляется свежая жидкость, что нехирургические компоненты добавляются в систему или удаляются из системы 10 или тому подобное. В зависимости от конфигурации системы 10 педальное приводное устройство 40 может предусматривать альтернативное устройство ввода для передачи информации в систему, которая также может быть выполнена с использованием пользовательского интерфейса 16, как обсуждалось выше. В других конфигурациях педальное приводное устройство 40 может использоваться для передачи информации в систему 10, которая не может быть предоставлена через пользовательский интерфейс 16.
[0072] Приведение в действие педального приводного устройства 40 (например, нажатие педального приводного устройства по направлению вниз или вытягивание педального приводного устройства ногой по направлению вверх) может передавать информацию в систему 10, не требуя от клинициста задействования руки для взаимодействия с пользовательским интерфейсом 16 (в случаях, когда пользовательский интерфейс 16 выполнен с возможностью приема вводных данных посредством физического касания пользователя). Конфигурирование системы 10 посредством педального приводного устройства 40 может быть полезно по целому ряду причин. Например, стерильный персонал, возможно, не сможет подключить пользовательский интерфейс 16, поскольку руки этих медработников заняты. В этих ситуациях стерильный персонал может задействовать педальное приводное устройство 40 для взаимодействия с системой 10. В качестве другого примера нестерильному персоналу может быть поручено взаимодействовать с системой 10, например, добавлять свежую хирургическую жидкость в раковину 14. Поскольку данных нестерильный персонал не придерживался обязательных протоколов стерилизации, ему не разрешается взаимодействовать с функциональными элементами в стерильной зоне, включая пользовательский интерфейс 16. Однако, поскольку педальное приводное устройство 40 может находиться в нестерильной зоне (например, за пределами хирургической простыни 35), нестерильный персонал может взаимодействовать с системой 10 посредством педального приводного устройства. Например, при добавлении свежей хирургической жидкости в раковину 14 персонал может сначала нажать на педальное приводное устройство 40, чтобы указать, что хирургическая жидкость должна быть добавлена в раковину. После добавления хирургической жидкости в раковину 14 персонал может нажать на педальное приводное устройство 40 во второй раз, чтобы указать, что хирургическая жидкость добавлена в раковину.
[0073] В то время как педальное приводное устройство 40 описано как приводимое в действие, не обязательно двигать или приводить в действие все педальное приводное устройство, чтобы оно считалось ножным педальным приводным устройством. Например, педальное приводное устройство 40 может иметь преобразователь или другой переключатель, часть которого перемещается в ответ на физическое нажатие оператором на педальное приводное устройство 40. Внешняя часть педального приводного устройства 40, с которым контактирует нога оператора, может перемещаться или не перемещаться. В любом случае педальное приводное устройство 40 может посылать управляющий сигнал контроллеру системы 10 в ответ на нажатие оператором на педальное приводное устройство 40.
[0074] На фиг. 6 проиллюстрирована функциональная схема, иллюстрирующая компоненты приведенной в качестве примера конфигурации системы термической обработки 10, которая содержит ранее описанное основание 12, раковину 14, пользовательский интерфейс 16 и дисплей 18. Система 10 в проиллюстрированном примере также содержит контроллер 42, устройство 44 для измерения объема, устройство 46 для термической обработки, датчик 48 температуры и бесконтактное считывающее устройство 50. Контроллер 42 соединен с возможностью связи с пользовательским интерфейсом 16, дисплеем 18, педальным приводным устройством 40, устройством 44 для измерения объема, устройством 46 для термической обработки, датчиком 48 температуры и бесконтактным считывающим устройством 50. Контроллер 42 может отправлять коммуникационные сигналы и/или принимать коммуникационные сигналы от пользовательского интерфейса 16, дисплея 18, педального приводного устройства 40, устройства 44 для измерения объема, устройства 46 для термической обработки, датчика 48 температуры и бесконтактного считывающего устройства 50 через проводные или беспроводные соединения, которые проиллюстрированные в примере на фиг. 6 как проводные соединения.
[0075] Контроллер 42 содержит процессор 52 и память 54. Память 54 хранит программное обеспечение для запуска контроллера 42, а также может хранить данные, сгенерированные или полученные процессором 52, например, от устройства 44 для измерения объема, датчика 48 температуры и бесконтактного считывающего устройства 50. Процессор 52 запускает программное обеспечение, хранящееся в памяти 54, для управления работой системы 10.
[0076] Система 10, проиллюстрированная на фиг. 6, также содержит источник 56 питания для передачи рабочей мощности на различные компоненты системы. Источник 56 питания может быть батареей, которая может быть заменяемой или перезаряжаемой. В качестве дополнительного или альтернативного варианта, источник 56 питания может быть входом питания, который получает питание от внешнего источника. Например, источник 56 питания может быть входом питания, соединенным с шнуром, который подключается к настенной розетке для подачи питания в систему 10. Питание, полученное от внешнего источника, может перезаряжать батарею, содержащуюся в системе 10, и/или непосредственно питать различные компоненты системы.
[0077] Различные компоненты системы 10 проиллюстрированы как содержащиеся в корпусе или оболочке 58, который окружает и определяет раковину 14. Корпус или оболочка 58 могут содержать различные компоненты системы 10 между поверхностями, образующими раковину 14, и внешними поверхностями стенки корпуса. При такой конфигурации электрические компоненты системы 10, проиллюстрированные на фиг. 6, могут подниматься и опускаться с корпусом 58, когда механизм регулирования высоты регулирует вертикальную высоту раковины 14. В других конфигурациях любые или все электрические компоненты, проиллюстрированные на фиг. 6, могут быть размещены в корпусе 24 и/или на основании 12.
[0078] Во время работы контроллер 42 может управлять системой 10 при помощи команд, связанных с информацией, хранящейся в памяти 54, и посредством команд, полученных от оператора через пользовательский интерфейс 16. Команды, выполняемые контроллером 42, могут, например, управлять устройством 46 для термической обработки для нагрева или охлаждения хирургической жидкости в раковине 14 до целевой температуры, установленной оператором с использованием пользовательского интерфейса 16. Команды, выполняемые контроллером 42, также могут определять количество хирургической жидкости, удаленной из раковины 14 во время медицинской процедуры, например, на основании обратной связи от устройства 44 для измерения объема и управлять пользовательским интерфейсом 16 и/или дисплеем 18 для отображения графического и/или текстового показания количества жидкости, используемой во время процедуры. В некоторых примерах команды, выполняемые контроллером 42, определяют, разрешено ли использовать хирургическую простыню (например, хирургическую простыню 35, проиллюстрированную на фиг. 5), размещенную на раковине 14 в системе 10, например, на основании обратной связи от бесконтактного считывающего устройства 50, и далее управляют пользовательским интерфейсом 16 и/или дисплеем 18 для вывода показания о том, разрешено ли использовать хирургическую простыню или нет.
[0079] Контроллер 42 сообщается с устройством 46 для термической обработки для управления температурой хирургического материала, размещенного в раковине 14. Устройство 46 для термической обработки находится в тепловом контакте с раковиной 14 и выполнено с возможностью регулировать температуру в раковине и материал в ней. Устройство 46 для термической обработки может быть реализовано с использованием любого устройства, которое генерирует контролируемый выходной параметр температуры. В некоторых примерах устройство 46 для термической обработки может охлаждать раковину 14 и её материал (например, по отношению к температуре окружающей среды), чтобы получить полу-замороженную жижицу из хирургической жидкости, размещенной в раковине. В других примерах устройство 46 для термической обработки может нагревать раковину 14 и её материал (например, по отношению к температуре окружающей среды) для получения нагретой хирургической жидкости.
[0080] Когда устройство для термической обработки 46 реализовано в качестве нагревательного устройства, устройство для термической обработки может генерировать тепло посредством электрического сопротивления. Тепло, генерируемое электрическим сопротивлением, может передаваться в раковину 14 и материал в ней посредством проводимости, конвекции и/или излучения. Например, проводка, которая генерирует тепло посредством электрического сопротивления, может находится в тепловом и/или физическом контакте с раковиной 14, например, внутри корпуса 58. Тепло, генерируемое устройством 46 для термической обработки, может передаваться через проводимость в раковину 14 и материал в ней.
[0081] В других примерах система 10 в соответствии с настоящим раскрытием изобретения не содержит устройство 46 для термической обработки. В этих конфигурациях система 10 может быть выполнена с возможностью отслеживания объема, удаляемого из раковины 14, и/или обеспечения измерений веса без термического регулирования материала в раковине 14. Например, система 10 в такой конфигурации может предусматривать устройство для измерения веса, которое может быть использовано для измерения веса различных объектов, таких как образец ткани, извлеченный из тела пациента. Система 10 может быть выполнена с функциями и функциональными возможностями, описанными в настоящем документе, но без функций и функциональных возможностей термического регулирования в таких конфигурациях.
[0082] В качестве одного примера устройство 46 для термической обработки может быть пленочным нагревателем, находящимся в тепловом контакте с раковиной 14. Пленочный нагреватель может быть тонкопленочным нагревателем или толстопленочным нагревателем. В тонкопленочном нагревателе слой материала сопротивления может быть осажден в вакууме на поверхности подложки (например, гибкий полимерный лист), после чего тонкий слой проводящего металла осаждается поверх материала сопротивления. Части результирующего пленочного стека могут быть вытравлены на образце металлических проводников. В толстопленочном нагревателе толстопленочная композиция, которая представляет собой смесь связующего вещества, носителя и окисей металлов, может быть осаждена на подложку (например, напечатана на подложке) и затем может обжигаться в печи. Тонкопленочный нагреватель может иметь толщину менее 5 миллиметров, например менее 2 миллиметров, менее 1 мм, менее 0,5 миллиметра или менее 0,25 миллиметра.
[0083] Независимо от конкретной конфигурации устройства 46 для термической обработки устройство для термической обработки может быть расположено внутри корпуса 58 для передачи тепловой энергии в раковину/из раковины 14 и её материала. Например, устройство 46 для термической обработки может быть расположено внутри корпуса 58 и находиться в контакте с дном 20 и/или боковой(-ыми) стенкой(-ами) 22 раковины 14 таким образом, что тепловая энергия передается посредством проводимости через дно и/или боковые стенки во время работы устройства теплообмена. Раковина 14 может быть изготовлена из теплопроводного металла, такого как алюминий или нержавеющая сталь, для содействия эффективной передаче тепловой энергии от устройства 46 для термической обработки в хирургическую жидкость внутри раковины 14 через стенки раковины.
[0084] Когда устройство 46 для термической обработки выполнено в виде пленочного нагревателя, пленка может быть обернута по меньшей мере вокруг части дна 20 и/или боковой(-ых) стенки(-ок) 22, чтобы расположить пленку для передачи тепловой энергии материалу раковины 14. Например, пленочный нагреватель может быть, по существу, центрирован вокруг дна 20 раковины 14 и может охватывать преобладающую часть (например, более 50 процентов площади дна) или значительную часть дна. Пленочный нагреватель может обернуть по меньшей мере частично и в некоторых примерах полностью боковую(-ые) стенку(-ки) 22 раковины 14. Размер площади поверхности дна 20 и/или боковой(-ых) стенки(-ок) 22, покрытой(-ых) пленочным нагревателем, может изменяться, например, в зависимости от размера раковины 14 и тепловой мощности пленочного нагревателя. В некоторых примерах по меньшей мере 25 процентов кумулятивной внешней площади поверхности раковины 14 (дно 20 и боковая(-ые) стенка(-ки) 22) покрыты пленочным нагревателем, например, по меньшей мере 50 процентов площади поверхности.
[0085] Для контроля температуры раковины 14 и/или материала в раковине система 10 в примере, проиллюстрированном на фиг. 6, содержит датчик 48 температуры. Датчик 48 температуры может измерять температуру раковины 14 и/или температуру материала в ней. В различных примерах датчик 48 температуры может быть термопарой, биметаллическим механическим датчиком температуры, датчиком температуры электрического сопротивления, оптическим датчиком температуры или любым другим подходящим типом температурного датчика. Датчик 48 температуры может генерировать сигнал, который представляет величину измеренной температуры и передает сгенерированный сигнал контроллеру 42. Контроллер 42 может принимать сигнал от датчика 48 температуры, показывающего температуру, измеренную датчиком, с периодическими интервалами или непрерывно. Соответственно, описание контроллера 42, принимающего информацию об измерении от датчика 48 температуры в конкретный момент времени, не подразумевает, что контроллер не может получать или не получает информацию об измерении в другие моменты времени.
[0086] В некоторых примерах датчик 48 температуры расположен на внешней поверхности раковины 14 (например, на противоположной стороне дна 20 или боковой(-ых) стенки(-ок) 22 от хирургической жидкости) и выполнен с возможностью измерения температуры жидкости через поверхность стенки. Однако, в других примерах раковина 14 может содержать проход, через который проходит датчик 48 температуры для измерения температуры жидкости непосредственно в раковине, а не опосредованно через поверхность стенки раковины. Это может обеспечить более точные измерения температуры материала в раковине 14, например, для более точного управления устройством 46 для термической обработки, чем в случае выполнения измерений температуры опосредованно через поверхность стенки раковины.
[0087] На фиг. 10 проиллюстрирован вид сверху раковины 14, иллюстрирующий приведенное в качестве примера расположение датчика 48 температуры. В проиллюстрированном примере раковина 14 определяет отверстие 49, проходящее через поверхность стенки раковины (например, по существу, центрированное на дне 20 в проиллюстрированной конфигурации). Датчик 48 температуры проходит через отверстие 49 и может быть герметически закупорен внутри отверстия, например, резиновой прокладкой или другим полимерным материалом между температурным датчиком и окружающей поверхностью стенки. Датчик 48 температуры может быть термически изолирован от остальной части раковины 14 путем размещения теплоизоляционного материала между датчиком температуры и остальной частью раковины. Эта конфигурация может быть полезна, например, когда пленочный нагреватель обернут вокруг поверхности стенки раковины 14, поскольку температура стенки может отличаться от температуры жидкости в раковине. Поскольку тепло подается в стенку раковины и/или жидкость в раковине компенсируется раковиной, раковина может иметь иную температуру, чем жидкость в раковине. Соответственно, прохождение датчика 48 температуры через отверстие 49 в раковине 14 и термическое изолирование его от остальной части раковины может обеспечить более точное измерение фактической температуры жидкости в раковине, чем при измерении температуры через стенку раковины.
[0088] Во время работы системы 10 клиницист может задействовать пользовательский интерфейс 16 для установки целевой температуры, до уровня которой, как предполагают, должна термически регулироваться раковина 14 и ее материал с использованием устройства 46 для термической обработки. Например, пользовательский интерфейс 16 может содержать средство регулирования температуры, с которым клиницист может взаимодействовать, чтобы установить целевую температуру. Средство регулирования температуры может быть вращаемой кнопкой, переключателем, взаимодействующей частью сенсорного экрана или другой функцией взаимодействия с пользователем, посредством которой клиницист может выдавать команды для задания целевой температуры. В ответ на получение целевой или заданной температуры от оператора через пользовательский интерфейс 16 контроллер 42 может выполнять различные действия. Контроллер 42 может управлять дисплеем, связанным с пользовательским интерфейсом 16 и/или дисплеем 18, для отображения целевой температуры, получаемой от оператора. В качестве дополнительного или альтернативного варианта, контроллер 42 может управлять устройством 46 для термической обработки, чтобы регулировать температуру раковины 14 и материала в ней до тех пор, пока температурный сигнал от датчика 48 температуры не покажет, что измеренная температура равна целевой температуре.
[0089] В некоторых примерах устройство для термической обработки 46 может нагревать хирургическую жидкость в раковине 14 до температуры, близкой к нормальной температуре тела пациента, например, температуре в пределах диапазона от 32,2 градуса по Цельсию (90 градусов по Фаренгейту) до 48,9 градуса по Цельсию (120 градусов по Фаренгейту), например, от 35 градусов по Цельсию (95 градусов по Фаренгейту) до 40,6 градуса по Цельсию (105 градусов по Фаренгейту). Жидкость, первоначально введенная в раковину, может находиться при температуре окружающей среды (например, 15,6 градуса по Цельсию (60 градусов по Фаренгейту) до 23,9 градуса по Цельсию (75 градусов по Фаренгейту)) при повышенной температуре, которую предназначена поддерживать раковина 14, или же при температуре, ниже температуры окружающей среды. Контроллер 42 может управлять дисплеем на пользовательском интерфейсе 16, если пользователь пытается установить целевую температуру на уровне температуры выше порогового уровня, например, выше 37,8 градуса по Цельсию (100 градусов по Фаренгейту) или выше 43,3 градуса по Цельсию (110 градусов по Фаренгейту). В некоторых таких вариантах применения контроллер 42 может запрещать пользователю устанавливать более высокую температуру и может управлять устройством 46 для термической обработки во избежание нагрева выше порогового значения. В других конфигурациях контроллер 42 может позволить пользователю подтверждать или принимать предупреждение о высокой температуре, предоставляемое через пользовательский интерфейс 16, и увеличивать целевую температуру выше порогового значения, например, до максимальной температуры. Максимальная температура может быть максимальной температурой, при которой устройство для термической обработки 46 может нагревать жидкость в раковине 14, или может быть более низкой температурой, сохраненной контроллером 42 по соображениям безопасности. Например, максимальная температура может быть установлена как температура, которая меньше или равна 54,4 градуса по Цельсию (130 градусам по Фаренгейту), например, температура, которая меньше или равна 48,9 градуса по Цельсию (120 градусам по Фаренгейту).
[0090] В некоторых примерах контроллер 42 предотвращает или прекращает работу устройства 46 для термической обработки в случае, когда контроллер определяет, что материал в раковине 14 отсутствует. В случае, когда хирургическую жидкость не добавляют в раковину 14 перед активацией устройства 46 для термической обработки или за соответствующий период времени после активации устройства для термической обработки, контроллер 42 может предотвратить или прекратить работу устройства. Например, когда устройство 46 для термической обработки выполнено с возможностью нагрева раковины 14, контроллер 42 может препятствовать сухому нагреву нагревателем раковины, когда в раковине нет хирургической жидкости, или в раковине недостаточное количество хирургической жидкости. Это может помочь предотвратить повреждение раковины 14 и/или устройства 46 для термической обработки.
[0091] В некоторых примерах контроллер 42 определяет, присутствует ли в раковине 14 достаточное количество материала (например, хирургической жидкости), на основании обратной связи от устройства 44 для измерения объема. Контроллер 42 может определять объем материала, присутствующего в раковине 14, на основании сигнала, полученного от устройства 44 для измерения объема. Контроллер 42 может сравнивать определенный объем с информацией, хранящейся в памяти 54, например информацию, указывающую пороговое количество материала, которое должно присутствовать в раковине 14, чтобы обеспечить работу устройства 46 для термической обработки. Контроллер 42 может предотвращать активацию устройства 46 для термической обработки до тех пор, пока он не определит, что в раковине 14 присутствует пороговое количество материала, и/или может прекратить работу устройства 46 для термической обработки, например, если в раковину не было добавлено пороговое количество материала в течение определенного периода времени с момента активации устройства для термической обработки.
[0092] В других примерах контроллер 42 косвенно определяет, присутствует ли в раковине 14 достаточное количество материала (например, хирургической жидкости), на основании обратной связи от датчика 48 температуры. После получения целевой температуры от оператора через пользовательский интерфейс 16 контроллер 42 может активировать устройство 46 для термической обработки и затем контролировать температуру раковины 14 на основании обратной связи от датчика 48 температуры. Например, контроллер 42 может контролировать температуру раковины 14 с момента активации устройства 46 для термической обработки, создавая профиль температуры, показывающий изменение температуры в раковине с течением времени. Контроллер 42 может сравнивать профиль температуры, созданный во время работы устройства 46 для термической обработки, с профилем температуры, хранящимся в памяти 54. Профиль температуры, хранящийся в памяти 54, может представлять собой ожидаемое изменение температуры в раковине с течением времени, когда в раковине присутствует соответствующее (например, пороговое) количество материала. В случае, когда контроллер 42 определяет, что профиль температуры, созданный во время работы устройства 46 для термической обработки, отклоняется от профиля температуры, хранящегося в памяти 54, более чем на пороговое количество (например, на 1 процентов или более, 5 процентов или более, 10 процентов или более), контроллер 42 может прекратить работу устройства 46 для термической обработки.
[0093] В некоторых примерах, таких как примеры, в случае которых устройство 44 для измерения объема реализовано как устройство взвешивания, контроллер 42 контролирует как вес раковины 14, так и материала в ней (например, через устройство взвешивания), а также созданный профиль температуры во время работы устройства 46 для термической обработки (например, измеренного датчиком 48 температуры) для определения материала в раковине. Например, после получения показания через пользовательский интерфейс 16 для инициирования тепловой регулировки контроллер 42 может определять вес раковины 14 и материала в ней и дополнительно получать данные, показывающие температуру раковины 14 с момента активации устройства 46 для термической обработки, таким образом предоставляя профиль температуры, показывающий изменение температуры раковины с течением времени. В случае, когда контроллер 42 обнаруживает вес в раковине 14, но определяет, что профиль температуры, созданный во время работы, отклоняется от профиля температуры, хранящегося в памяти, контроллер может определить, что в раковине 14 присутствуют инструменты, которые не были зарегистрированы при поступлении в нее. Соответственно, контроллер 42 может реагировать посредством управления дисплеем или предоставления другого средства пользовательского вывода (например, звукового, визуального сообщения), давая пользователю указание об удалении инструментов. Контроллер 42 может запрещать или может не запрещать непрерывную термическую регулировку, если пользователь не удаляет инструменты, например, как подтверждено контроллером 42, обнаруживающим изменение веса раковины 14 и материала в ней.
[0094] В качестве другого примера, если контроллер 42 обнаруживает вес в раковине 14, но не получил через пользовательский интерфейс 16 показание того, что жидкость должна была находиться в раковине, контроллер может дополнительно сравнить профиль температуры, созданный во время работы, с профилем температуры, сохраненным в памяти и соответствующим профилю нагрева жидкости. В случае, когда контроллер 42 определяет, что созданный профиль температуры, по существу, соответствует сохраненному профилю температуры, контроллер может определить, что начальный вес, измеренный в раковине 14, представляет собой жидкость, которая не была проверена через пользовательский интерфейс 16. В таком случае контроллер 42 может сохранить измеренный вес, соответствующий материалу раковины 14, в виде веса/объема жидкости в памяти, связанной с контроллером. Контроллер может впоследствии включать этот вес/объем при отслеживании последующего добавления жидкости в раковину или удаления жидкости из раковины, например, содействуя надежному отслеживанию общего количества жидкости, выводимой из раковины, даже если оператор не указывает, когда жидкость изначально добавляется в раковину 14.
[0095] Соответственно, в некоторых конфигурациях контроллер 42 может обнаруживать вес раковины 14 и ее материала, а также профиль температуры раковины, созданный во время термического регулирования. Контроллер 42 может сравнивать профиль веса и/или температуры с информацией, хранящейся в памяти, для определения материала в раковине 14, например, если в раковине есть только воздух, инструменты и/или жидкость. Контроллер 42 может обеспечивать пользовательский вывод данных на основании определенного материала раковины.
[0096] В дополнение к управлению или вместо управления устройством 46 для термической обработки на основании измеренного профиля температуры, контроллер 42 может регулировать скорость нагрева устройством 46 для термической обработки на основании информации, полученной от устройства 44 для измерения объема и датчика 48 температуры. Например, когда устройство 44 для измерения объема реализовано как устройство взвешивания, контроллер 42 может получать информацию о весе раковины 14 и материал в ней (например, хирургической жидкости). Контроллер 42 может дополнительно получать информацию о температуре любых компонентов в раковине 14 от датчика 48 температуры. Контроллер 42 может контролировать скорость нагрева и, следовательно, количество тепловой энергии, подаваемой устройством 46 для термической обработки, на основании полученной информации о весе и температуре.
[0097] В процессе работе устройство 46 для термической обработки может более быстро повышать температуру жидкости в раковине 14 от начальной температуры до целевой температуры, когда в раковине имеется сравнительно меньшее количество жидкости, по сравнению с тем, когда имеется сравнительно большее количество жидкости в раковине. Поскольку может существовать задержка теплового равновесия между ситуацией, когда жидкость в раковине 14 достигает целевой температуры, и ситуацией, когда датчик 48 температуры измеряет указанную заданную температуру, устройство 46 для термической обработки может иметь тенденцию к перегреву жидкости в раковине. Это означает, что жидкость в раковине 14 может нагреваться до температуры выше целевой или заданной температуры, прежде чем контроллер 42 получит сигнал от датчика 48 температуры, показывающий, что достигнута целевая температура, и может управлять устройством 46 для термической обработки, чтобы прекратить подачу тепла в жидкость. Эти явления температурного перегрева могут быть более выраженными в тех случаях, когда в раковине 14 имеется сравнительно небольшое количество жидкости и жидкость нагревается сравнительно быстро.
[0098] Для облегчения контроля за скоростью, с которой жидкость в раковине 14 нагревается для более точного нагрева, контроллер 42 может регулировать скорость, с которой устройство 46 для термической обработки подает тепло на основании информации о количестве жидкости в раковине. На фиг. 11 проиллюстрирована блок-схема, иллюстрирующая приведенный в качестве примера способ, который может выполнять система 10 для управления количеством тепловой энергии, подаваемой устройством 46 для термической обработки в раковину 14 и материалу в ней.
[0099] Как проиллюстрировано на фиг. 11, контроллер 42 получает информацию о целевой температуре от пользователя через пользовательский интерфейс 16 (250). Как обсуждалось выше, пользователь может взаимодействовать с пользовательским интерфейсом 16 посредством различных средств связи, таких как физический контакт с пользовательским интерфейсом, звуковые команды или бесконтактные команды, обнаруживаемые пользовательским интерфейсом. Информация о целевой температуре может указывать на целевую температуру, до которой должна нагреваться жидкость в раковине 14.
[00100] Контроллер 42 также получает информацию о количестве жидкости в раковине 14 из устройства 44 для измерения объема (252). Например, когда устройство 44 для измерения объема реализовано как устройство взвешивания, контроллер 42 может получать информацию о весе раковины 14 и материала в ней. В случае, когда контроллер 42 определяет, что в раковине 14 нет жидкости или в раковине недостаточное количество жидкости, контроллер может не активировать устройство 46 для термической обработки, а вместо этого может управлять дисплеем пользовательского интерфейса 16 для предоставления пользователю команд о добавлении жидкости в раковину. В любом случае контроллер 42 может анализировать информацию о количестве жидкости в раковине 14 и использовать эту информацию для управления устройством 46 для термической обработки.
[00101] Что касается информации, хранящейся в памяти, контроллер 42 может определять, является ли количество жидкости в раковине 14 сравнительно небольшим или присутствует ли в раковине большее количество жидкости, и может дополнительно определять скорость нагрева на основании информации о количестве жидкости (254). Например, контроллер 42 может сравнивать информацию об измерении веса, указывающую на количество жидкости в раковине 14, с одним или более пороговыми значениями веса, хранящимися в памяти, связанной с контроллером. В случае, когда контроллер 42 определяет, что вес жидкости в раковине превышает пороговое значение веса, контроллер может управлять устройством 46 для термической обработки для нагрева раковины и жидкости в ней с первой скоростью нагрева. И напротив, если контроллер 42 определяет, что вес жидкости в раковине меньше порогового значения веса, контроллер может управлять устройством 46 для термической обработки для нагрева раковины и жидкости в ней со второй скоростью нагрева, меньшей, чем первая скорость нагрева. При первой скорости нагрева в раковину 14 поступает больше тепловой энергии, чем при второй скорости нагрева.
[00102] Пороговое значение или пороговые значения, используемые для установки скорости нагрева, подаваемого устройством 46 для термической обработки, могут варьироваться, например, в зависимости от количества тепловой энергии, которую устройство может подавать в объемах раковины 14. В некоторых примерах пороговое значение веса составляет менее 5 кг, например, вес менее 2 кг или вес менее 1000 г. Например, пороговое значение может составлять 500 г или менее. В качестве дополнительного или альтернативного варианта, пороговое значение может быть установлено на основании максимального количества жидкости, которую можно добавить в раковину 14. Например, пороговое значение может соответствовать количеству жидкости в раковине 14, которое составляет менее 50% от максимального количества жидкости, которую можно добавить в раковину, например, менее 30% от максимального количества. Например, пороговое значение может быть значением, соответствующим количеству жидкости в раковине 14, которое находится в диапазоне от 2% до 30% от максимального количества жидкости, которое может быть добавлено в раковину, например, от 5% до 20% от максимального количества. Нижний предел этих диапазонов может соответствовать количеству жидкости, ниже которого устройство 46 для термической обработки не будет активировано, когда система 10 настроена таким образом. В примерах, в которых максимальный объем раковины 14 составляет менее 10 литров, например, 5 литров, пороговое значение может быть значением в диапазоне от 0,25 литра до 1 литра. Оно может соответствовать значению веса от 250 г до 1 кг, при этом предполагают, что жидкость обладает плотностью 1 кг на литр.
[00103] В некоторых примерах скорость нагрева, подаваемого устройством 46 для термической обработки, регулируется путем изменения напряжения или тока, подаваемого в устройство для термической обработки. В других примерах скорость нагрева, подаваемого устройством 46 для термической обработки, регулируется путем изменения рабочего цикла, или рабочей частоты, устройства для термической обработки. Например, первая скорость нагрева может соответствовать рабочему циклу устройства для термической обработки, превышающему рабочий цикл при второй скорости нагрева. В качестве примеров рабочий цикл устройства 46 для термической обработки для первой скорости нагрева может составлять 100% рабочего цикла. И наоборот, рабочий цикл устройства 46 термической обработки для второй скорости нагрева может быть меньше, например, рабочий цикл может находиться в диапазоне от 25% до 75%. Рабочий цикл может рассматриваться как процент времени в течение заданного периода времени, в течение которого устройство 46 для термической обработки активно и подает тепловую энергию в раковину 14, в отличие от циклического отключения и отсутствия подачи тепловой энергии в раковину. Устройство 46 для термической обработки может работать на полную мощность и периодически циклически включаться и отключаться для изменения рабочего цикла.
[00104] С дополнительной ссылкой на фиг. 11, контроллер 42 выполнен с возможностью управления устройством 46 для термической обработки для нагрева раковины 14 и жидкости в ней со скоростью нагрева, определенной так, чтобы она соответствовала количеству жидкости, присутствующей в раковине (256). Контроллер 42 может получать информацию об измерения температуры от датчика 48 температуры относительно измеренной температуры жидкости в раковине 14 (258). Контроллер 42 может продолжать подавать тепло в жидкость в раковине 14 со скоростью, определенной так, чтобы она соответствовала количеству жидкости, присутствующей в раковине, до тех пор, пока температура жидкости, измеренная посредством датчика 48 температуры, не достигнет целевой температуры. По достижении целевой температуры контроллер 42 может управлять устройством 46 для термической обработки, чтобы прекратить подачу тепла в раковину и в жидкость в ней.
[00105] Управление количеством тепла, подаваемого в раковину 14, на основании информации о количестве жидкости, которая, как определено, присутствует в раковине, может быть полезным для предотвращения перегрева жидкости. В некоторых примерах контроллер 42 выполнен с возможностью управления устройством 46 для термической обработки для изменения скорости нагрева, подаваемого в раковину, в то время как информация об измерении температуры от датчика 48 температуры указывает на то, что температура жидкости в раковине приближается к целевой температуре. Контроллер 42 может изменять скорость нагрева путем уменьшения скорости нагрева (например, постепенно, путем ступенчатого изменения), подаваемого в раковину 14, независимо от того, с какой начальной скоростью нагрев подавался в раковину. Например, когда контроллер 42 определяет, что жидкость в раковине 14 находится в пределах определенного диапазона степени по сравнению с целевой температурой, например, в пределах от ‒15 градусов по Цельсию до ‒12 градусов по Цельсию (от 5 градусов по Фаренгейту или 10 градусов по Фаренгейту) по сравнению с целевой температурой, контроллер может уменьшить количество тепла, подаваемого в раковину по сравнению с количеством тепла, подаваемого до того, как жидкость достигла определенного диапазона степени. Это может замедлить скорость нагрева, когда температура жидкости приближается к целевой температуре, и может помочь предотвратить перегрев.
[00106] Система 10, проиллюстрированная на фиг. 6, также содержит устройство 44 для измерения объема. Устройство 44 для измерения объема выполнено с возможностью либо непосредственного, либо косвенного измерения объема материала (например, хирургической жидкости), присутствующего в раковине 14. Устройство 44 для измерения объема может генерировать информацию касательно объема о количестве хирургической жидкости, присутствующей в раковине, и сообщать данную информацию контроллеру 42. Эта информация может использоваться контроллером 42 для контроля за количеством жидкости, добавляемой в раковину и удаленной из раковины 14 во время процедуры, и, соответственно, определения объема хирургической жидкости, потребленной во время процедуры. Контроллер 42 может получать сигнал от устройства 44 для измерения объема, указывающий на объем, измеренный датчиком с периодическими интервалами или непрерывно. Описание контроллера 42, получающего информацию об измерении от устройства 44 для измерения объема в определенное время, не означает, что контроллер не может получать информацию об измерении в другие моменты времени.
[00107] Устройство 44 для измерения объема может быть реализовано посредством любого устройства, которое измеряет количество жидкости в раковине 14, на основании которого можно определить объем. В разных вариантах применения устройство 44 для измерения объема может быть реализовано посредством тензодатчика, который косвенно измеряет объем путем измерения массы раковины 14 и материала в ней, поплавка, который поднимается и опускается в зависимости от уровня хирургической жидкости в раковине, оптического датчика или датчика электрического сопротивления, который определяет величину объема в раковине, или же датчика другого типа. Например, раковина 14 может быть выполнена с раздаточным выходным отверстием, через которое жидкость выводится из раковины. Жидкость может выводиться непосредственно в тело пациента через магистраль или в емкость для жидкости (например, измерительный сосуд), которая затем используется для передачи жидкости пациенту. Может быть предусмотрен расходомер, который измеряет объем жидкости, проходящий через раздаточное выходное отверстие. В качестве другого примера, раковина 14 может быть выполнена с расходомером, который измеряет объем жидкости при ее добавлении в раковину. Количество жидкости, добавленной в раковину, может быть математически уменьшено на количество жидкости, оставшейся в раковине, для определения количества используемой жидкости. Независимо от конфигурации, устройство 44 для измерения объема может генерировать электрический сигнал, величина которого пропорциональна объему материала, присутствующему в раковине 14 и/или выводимому из раковины. Этот сигнал может содержать информацию об объеме, причем объем материала, присутствующего в раковине 14, может быть определен контроллером 42 на основании сигнала.
[00108] В вариантах применения, в которых устройство 44 для измерения объема реализовано как устройство взвешивания, контроллер 42 может вычесть вес любой хирургической простыни, помещенной в раковину 14, для определения материала раковины. Например, контроллер 42 может уменьшать измеренные значения веса на собственный вес раковины 14 и/или хирургической простыни, размещенной в ней, который может быть измерен при запуске или сохранении в памяти, связанной с контроллером 42. В качестве другого примера, вес хирургической простыни, помещенной на раковине 14, может храниться на бесконтактной метке, связанной с хирургической простыней. Бесконтактное считывающее устройство 50 может считывать вес хирургической простыни с метки, когда хирургическая простыня помещается на раковину, а контроллер 42 может впоследствии использовать вес хирургической простыни для уменьшения измеренного веса.
[00109] Устройство 44 для измерения объема может быть расположено вокруг раковины 14 в месте, подходящем для обнаружения объема хирургической жидкости, присутствующей в раковине 14. Конкретное место, в котором расположено устройство 44 для измерения объема, может варьироваться в зависимости от типа устройства, используемого для измерения объема жидкости, присутствующей в раковине. Например, в случае поплавка, который поднимается и опускается в зависимости от объема жидкости, присутствующей в раковине 14, поплавок может быть расположен в раковине 14 и соединен с преобразователем в корпусе 58, который обнаруживает и передает соответствующее положение поплавка. В качестве другого примера, в случае тензодатчика, который измеряет вес раковины 14 и материала в ней, тензодатчик может быть расположен под раковиной 14 (например, в контакте с дном 20) для измерения веса раковины и материала в ней.
[00110] Когда устройство 44 для измерения объема реализовано как устройство взвешивания, устройство взвешивания может включать весы любого типа, выполненные с возможностью определения веса или массы объекта. Например, устройство взвешивания может быть реализовано с использованием одного или более тензодатчиков, деформационных манометров, пружинных весов, аналитической шкалы, гидравлических весов, пневматических весов или любого другого прибора или устройства, выполненных с возможностью измерения веса или массы объект. В некоторых примерах устройство взвешивания содержит одну или более опорных балок, расположенных под раковиной 14 для измерения веса раковины и материала в ней. Например, устройство взвешивания с несколькими опорными балками, содержащее два или более тензодатчиков, могло бы функционировать в качестве тензодатчика моста измерения. Такое устройство взвешивания могло бы получать вес раковины 14 и материала в ней, а также предоставлять аналоговые сигналы давления монтажной плате, которые определяют и преобразуют эти измерения в одно значение массы.
[00111] Хотя устройство 44 для измерения объема может располагаться в различных местах по отношению к раковине 14, на фиг. 12 проиллюстрировано приведенное в качестве примера расположение компонентов, когда устройство 44для измерения объема реализовано как устройство для измерения веса. В частности, на фиг. 12 представлено изображение в разобранном виде в поперечном сечении раковины 14, выполненном по линии поперечного сечения А-А, проиллюстрированной на фиг. 1, показывающее приведенное в качестве примера расположение компонентов. В проиллюстрированном примере система 10 содержит раковину 14, устройство 44 для измерения веса и устройство 46 для термической обработки. Устройство 44 для измерения веса проиллюстрировано как выполненное по меньшей мере с одним тензодатчиком, вид которого изображен в поперечном сечении и который показан в виде тензодатчиков 45А, 45В. Устройство 46 для термической обработки проиллюстрировано как тонкопленочный нагреватель, обернутый по меньшей мере частично вокруг дна 20 и боковых стенок 22 раковины 14. Корпус 58 проиллюстрирован как имеющий по меньшей мере одну боковую стенку 58А, обернутую по направлению вверх от подставки 58В по меньшей мере вокруг одной боковой стенки 22 раковины.
[00112] Кроме того, система 10 содержит крепежную плиту 60, которая определяет первую сторону 62 и вторую сторону 64, противоположную первой стороне. Крепежная плита 60 прикреплена к раковине 14 с воздушным зазором 66, образованным между крепежной плитой в раковине. Например, воздушный зазор 66 может быть определен между нижней поверхностью дна 20 раковины 14 на первой стороне 62 крепежной плиты 60. Устройство 44 для измерения веса расположено на второй стороне 64 крепежной плиты 60. Соответственно, в этой конфигурация, крепежная плита вставлена между раковиной 14 и устройством 44 для измерения веса с воздушным зазором 66 между раковиной и устройством для измерения веса.
[00113] Конфигурирование системы 10 с воздушным зазором 66 между раковиной 14 и устройством 44 для измерения веса может быть полезным для содействия термической изоляции устройства для измерения веса от устройства 46 для термической обработки и/или нагретого материала раковины 14. В разных примерах воздушный зазор 66 может быть полностью лишен материала или может быть заполнен теплоизоляционным материалом. В любом случае отделение раковины 14 от устройства 44 для измерения веса может помочь уменьшить или исключить ошибочные измерения веса, вызванные тем, что устройство для измерения веса имеет другую рабочую температуру, для которой оно откалибровано. Это может помочь в улучшении точности измерений веса, выполненных с использованием устройства, и параметров управления, определенных на основании измерений веса, например, таких как скорости нагрева.
[00114] В некоторых примерах воздушный зазор 66 имеет такие размеры, которые определяют степень, с какой устройство 44 для измерения веса поднимает температуру выше температуры окружающей среды, например, когда устройство 46 для термической обработки работает и/или раковина 14 содержит нагретый материал. Например, воздушный зазор 66 может иметь такой размер, чтобы устройство 44 для измерения веса не достигало температуры более 5 градусов по Цельсию выше температуры окружающей среды, когда материал в раковине нагревается до температуры в диапазоне от 32,2 градуса по Цельсию (90 градусов по Фаренгейту) до 48,9 градуса по Цельсию (120 градусов Фаренгейта). В некоторых примерах воздушный зазор 66 может составлять менее 5 см, например, менее 2 см. В качестве одного примера воздушный зазор 66 может находиться в диапазоне от 0,1 см до 10 см.
[00115] Крепежная плита 60 может быть прикреплена к раковине 14 в нескольких разных местах. В одном примере крепежная плита 60 может проходить по направлению вверх и может быть неподвижно прикреплена под краем, образованной там, где боковые стенки 22 искривляются в верхней части раковины 14. В качестве другого примера крепежная плита 60 может быть неподвижно прикреплена под дном 20 раковины 14, как проиллюстрировано на фиг. 12. Когда крепежная плита 60 прикреплена под дном 20, система 10 может содержать одну или более прокладок 68, расположенных между первой поверхностью 62 крепежной плиты в нижней части дна 20. Длина прокладок 68 может определять размер воздушного зазора 66. Например, прокладки могут иметь верхнюю часть и крепиться к нижней части дна 20 и нижнему концу, прикрепленному к верхней части или первой поверхности 62 крепежной плиты 60.
[00116] Для обеспечения того, чтобы устройство для измерения веса 44 могло обнаруживать изменения в весе материала раковины 14, раковина может плавать или перемещаться относительно устройства для измерения веса. Например, раковина 14 и крепежная плита 60, прикрепленная к ней через прокладки 68 (в случае такой конфигурации), могут быть выполнены с возможностью перемещения по направлению вверх и вниз относительно устройства 44 для измерения веса, в то время как значение веса в раковине изменяется. Вторая поверхность 64 крепежной плиты 60 может прижиматься к тензодатчикам 45А, 45В с различной степенью усилия в зависимости от значения веса в раковине.
[00117] Для предотвращения непреднамеренного выталкивания пользователем раковины 14 из корпуса или оболочки 58 диапазон перемещения, в пределах которого может перемещаться раковина (и крепежная плита 60 при ее прикреплении), может быть определён. Корпус 58 может иметь внутренний выступ, фиксатор или сужение, с которым раковина 14 и/или крепежная плита 60 контактирует, когда достигает верхней протяженности перемещения. В качестве другого примера один или более крепежных стержней 70 могут быть прикреплены к корпусу 58 и проходить через крепежную плиту 60. Крепежные стержни 70 могут иметь выступ или расширение на своем верхнем конце над первой поверхностью 62 крепежной плиты 60. Соответственно, раковина 14 и крепежная плита 60 могут перемещаться по крепежным стержням 70 вертикально вверх, пока верхняя часть крепежной плиты не войдет в контакт с расширением крепежного стержня. Раковина 14 и крепежная плита 60 могут дополнительно перемещаться по крепежным стержням 70 вертикально вниз, пока нижняя часть крепежной плиты не войдет в контакт с верхней поверхностью тензодатчиков 45А, 45В. Таким образом, раковина 14 может свободно плавать внутри корпуса 58 в определённом диапазоне перемещения.
[00118] Чтобы позволить раковине 14 перемещаться по направлению вверх и вниз по всему диапазону перемещения, верхняя поверхность раковины может быть соединена с возможностью перемещения с корпусом 58 таким образом, что верхняя поверхность может перемещаться, не выходя из корпуса. В проиллюстрированной конфигурации боковая стенка 22 раковины 14 заканчивается краем 72, который проходит, как правило, горизонтально и переходит, как правило, из вертикально ориентированной остальной части боковой стенки. Корпус 58 содержит фланцевую часть 74, проходящую над концевым краем 72. Корпус 74 фланца может быть выполнен с возможностью сгибания вверх и вниз для сохранения соответствия краю 72, когда раковина 14 перемещается по направлению вверх и вниз. В других конфигурациях край 72 может быть неподвижно соединен с корпусом 58 или раковина 14 может даже не содержать край.
[00119] Когда устройство 44 для измерения веса реализовано с использованием одного или более тензодатчиков 45А, 45В, тензодатчики могут быть разнесены на разных расстояниях друг от друга под дном 20 и/или крепежной плитой 60. В качестве одного примера, система 10 может содержать четыре тензодатчика, расположенные по прямоугольнику под раковиной 14 для измерения веса, по существу, равномерно по всей раковине. Количество и расположение тензодатчиков могут варьироваться, например, в зависимости от размера и формы раковины 14. В разных примерах устройство 44 для измерения веса имеет погрешность, с которой измеряется вес материала раковины 14, в пределах 250 г от его фактического веса, например, в пределах 100 г от его фактического веса, в пределах 50 г от его фактического веса, в пределах 10 г от его фактического веса, в пределах 5 г от его фактического веса, в пределах 1 г от его фактического веса, в пределах 0,5 г от его фактического веса или в пределах 0,1 г от его фактического веса.
[00120] Во время работы объем в раковине 14, а также вес материала раковины могут увеличиваться и уменьшаться по мере того, как жидкость добавляют в раковину и удаляют из раковины, а также по мере того, как медицинское оборудование добавляют в раковину и удаляют из раковины. Чтобы дать контроллеру 42 возможность различать, когда жидкость добавляется в раковину или удаляется из раковины 14 по сравнению с добавлением или удалением нежидкостных компонентов, контроллер может получать информацию о типе материала, который добавляют в раковину или удаляют из раковины. Например, контроллер 42 может получать информацию о типе материала, который добавляют в раковину и/или удаляют из раковины 14, посредством взаимодействия клинициста с одним или более пользовательскими интерфейсами системы 10.
[00121] В некоторых примерах пользовательский интерфейс 16 принимает пользовательский ввод клиницистом для выборочного указания контроллеру 42, когда добавляется в раковину или удаляется из раковины нежидкостный компонент, такой как медицинский инструмент или оборудование. Средство пользовательского ввода может быть физически подвижной кнопкой (например, переключателем, ползунком, вращаемой кнопкой), выбираемым компьютерным значком, частью сенсорного экрана или типом средства пользовательского ввода, описанным в настоящем документе. В процессе операции клиницист может взаимодействовать со средством пользовательского ввода (например, нажимать кнопку), тем самым предоставляя первое указание контроллеру 42, что необходимо добавить нежидкостный компонент в раковину 14 или удалить нежидкостный компонент из раковины. После последующего добавления нежидкостного компонента в раковину 14 или удаления нежидкостного компонента из раковины, клиницист может снова взаимодействовать со средством пользовательского ввода (например, нажимать кнопку), тем самым предоставляя второе указание контроллеру 42, что клиницист завершил добавление нежидкостного компонента в раковину 14 или удаление нежидкостного компонента из раковины. В качестве альтернативного варианта, контроллер 42 может автоматически определять без ввода пользователя (например, без взаимодействия пользователя с пользовательским интерфейсом 16), что клиницист завершил добавление нежидкостного компонента в раковину 14 или удалил нежидкостный компонент из раковины после того, как прошло пороговое количество времени с момента получения первого указания, например, по меньшей мере 10 секунд, по меньшей мере 30 секунд или по меньшей мере одна минута. В этой альтернативной конфигурации клиницист может, но не обязательно, взаимодействовать со средством пользовательского ввода во второй раз после добавления нежидкостного компонента в раковину 14 или удаления нежидкостного компонента из раковины.
[00122] Контроллер 42 может принимать информацию об объеме от устройства 44 для измерения объема относительно объема хирургической жидкости, присутствующей в раковине. В некоторых примерах система имеет функцию задействования пользователя (например, кнопку), с которой пользователь может взаимодействовать, чтобы переключаться между отчетным выводом данных в единицах объема и единицах веса. В случае, когда устройство 44 для измерения объема является устройством взвешивания, информация об объеме может быть представлена в виде информации о весе. В любом случае контроллер 42 может определять объем хирургической жидкости, присутствующей в раковине 14, на основании информации об объеме, полученной от устройства 44 для измерения объема. Контроллер 42 может сохранять данные об определенном объеме в памяти 54. В ответ на прием через пользовательский интерфейс первого показания того, что клиницист намерен добавить нежидкостный компонент в раковину 14 или удалить нежидкостный компонент из раковины, контроллер 42 может получать информацию об объеме от устройства 44 для измерения объема, указывающую на изменение объема хирургической жидкости, присутствующей в раковине 14. Изменение объема может быть вызвано тем, что клиницист добавляет в раковину 14 нежидкостный компонент или удаляет из раковины нежидкостный компонент, а не фактическими изменениями количества жидкости, присутствующей в раковине. Соответственно, контроллер 42 может игнорировать изменения объема хирургической жидкости, который, как определено, присутствует в раковине 14 между получением первого показания и получением второго показания, что указывает на то, что клиницист завершил добавление нежидкостного компонента в раковину или удаление нежидкостного компонента из раковины. Контроллер 42 может игнорировать изменения объема, ссылаясь на данные об объеме хирургической жидкости, хранящиеся в памяти 54, который, как определено, присутствует в раковине 14, до получения первого показания и установки того, что сохраняемый объем является фактическим объемом, присутствующим в раковине, после того, как жидкостный компонент был добавлен в раковину 14 или удален из раковины 14.
[00123] Хотя система 10 и контроллер 42 могут быть выполнены с возможностью приема пользовательского ввода, указывающего, когда нежидкостный компонент добавлен в раковину или удален из раковины 14, система может по-прежнему точно отслеживать объем жидкости, удаленной из раковины, без реализации этой функциональной возможности. В этих вариантах применения пользователю может быть дано указание начать (например, до добавления жидкости) с любых нежидкостных компонентов, которые будут использоваться во время процедуры либо в раковине 14, либо вне раковины. Если нежидкостные компоненты первоначально добавляются в раковину, контроллер 42 может определять вес нежидкостных компонентов (в случае, когда он выполнен с устройством для измерения веса) и тарировать вес или иным образом уменьшать вес нежидкостных компонентов, когда впоследствии будет определять объем жидкости, удаляемой из раковины. Пользователю может быть дано указание на то, что нежидкостные компоненты, первоначально присутствующие в раковине, должны быть возвращены в раковину, чтобы произвести точное измерение объема жидкости, удаленной из раковины (в противном случае система может определять недостающий вес нежидкостного компонента как удаляемую жидкость). В качестве альтернативного варианта, пользователь может первоначально начинать работу без каких-либо нежидкостных компонентов в раковине. Затем пользователю может быть дано указание, что из раковины необходимо удалить нежидкостные компоненты, чтобы произвести точное измерение объема жидкости, удаленной из раковины (в противном случае система может определить нежидкостный компонент как дополнительную жидкость, которая фактически была удалена из системы). Предоставление пользователям указаний о том, что показания объема должны приниматься с учетом того, что нежидкостные компоненты находятся «внутри» или «вне» раковины 14 для получения точного показания, могут упростить работу и взаимодействие пользователя с системой 10.
[00124] В дополнение к пользовательскому вводу или вместо пользовательского ввода для указания того, когда медицинское оборудование добавляется в раковину или удаляется из раковины 14, система 10 может также быть выполнена с возможностью приема пользовательского ввода от пользователя для предоставления контроллеру 42 указания о том, когда свежая хирургическая жидкость должна быть добавлена в раковину 14. Пользовательский ввод может быть физически подвижной кнопкой (например, переключателем, ползунком, вращаемой кнопкой), выбираемым компьютерным значком, частью сенсорного экрана или другим средством взаимодействия с пользовательским интерфейсом, как обсуждалось в настоящем документе. В качестве дополнительного или альтернативного варианта, средство пользовательского ввода может представлять собой ножное педальное приводное устройство 40. Например, система 10 может быть выполнена с несколькими пользовательскими интерфейсами, причем любой из них может использоваться для предоставления контроллеру 42 указания о том, когда свежая хирургическая жидкость должна быть добавлена в раковину 14. Система 10 может содержать одно средство пользовательского ввода, которое является частью пользовательского интерфейса 16, с которым может взаимодействовать клиницист (например, стерильный полевой персонал) для предоставления контроллеру 42 указания о том, когда хирургическая жидкость должна быть добавлена в раковину 14. Система 10 может также содержать еще одно средство пользовательского ввода в виде ножного педального приводного устройства 40, с которым может взаимодействовать клиницист (например, либо стерильный полевой персонал, либо нестерильный полевой персонал), чтобы предоставлять контроллеру 42 указания о том, когда хирургическая жидкость должна быть добавлена в раковину 14.
[00125] Во время операции клиницист может взаимодействовать с любым средством пользовательского ввода, которое предоставляет указание о том, когда свежая хирургическая жидкость должна быть добавлена в раковину 14 (например, путем манипуляции средством пользовательского ввода на пользовательском интерфейсе 16 или путем приведения в действие ножного педального приводного устройства 40). Когда клиницист первоначально взаимодействует с одним из средств пользовательского ввода/интерфейсов, контроллер 42 может получить первое указание о том, что в раковину 14 необходимо добавить свежую хирургическую жидкость. После последующего добавления хирургической жидкости в раковину 14 клиницист может снова взаимодействовать либо со средством пользовательского ввода, либо с интерфейсом (например, путем манипулирования средством пользовательского ввода на пользовательском интерфейсе 16 или путем приведения в действие ножного педального приводного устройства 40), тем самым предоставляя контроллеру 42 второе указание, что клиницист завершил добавление хирургической жидкости в раковину 14. В качестве альтернативного варианта, контроллер 42 может автоматически определять (например, без взаимодействия пользователя со средством пользовательского ввода или с интерфейсом), что клиницист завершил добавление свежей хирургической жидкости в раковину 14 после того, как прошло пороговое количество времени с момента получения первого указания, например, по меньшей мере 10 секунд, по меньшей мере 30 секунд или по меньшей мере одна минута.
[00126] В некоторых примерах система 10 выполнена с возможностью приема сигнала от устройства 44 для измерения объема при включении, например, для определения того, мог ли пользователь разместить хирургическую жидкость в раковине 14 перед включением устройства. В случае, когда контроллер 42 принимает данные, указывающие, что в раковине 14 при включении присутствует объем материала, контроллер может предпринимать различные ответные действия. Контроллер 42 может управлять дисплеем пользовательского интерфейса 16 для выдачи диалогового окна с запросом пользователя о том, является ли обнаруженный объем жидкостью, которая была добавлена в раковину. В качестве дополнительного или альтернативного материала, контроллер может автоматически определять (например, без взаимодействия пользователя со средством пользовательского ввода/интерфейсом), что обнаруженный объем представляет собой свежую жидкость в раковине. Например, контроллер 42 может управлять дисплеями, чтобы запрашивать у пользователя, является ли обнаруженный объем хирургической жидкостью, которая была добавлена в раковину, и, если пользователь не отвечает по прошествии порогового количества времени, контроллер может автоматически обозначать измеренный объем как свежую жидкость и сохранить данные об измеренном объеме в памяти. Пороговое количество времени может представлять собой количества времени, о которых говорилось выше, например, по меньшей мере 10 секунд, по меньшей мере 30 секунд или по меньшей мере одна минута. В тех случаях, когда устройство 44 для измерения объема реализовано как устройство для измерения веса, контроллер 42 может обнаруживать объем жидкости, потенциально присутствующей в раковине 14 при запуске, путем определения веса в раковине 14, превышающего ожидаемый веса самой конструкции (например, вес раковины и/или хирургической простыни 35, которая, как ожидается, будет разостлана на раковине).
[00127] Контроллер 42 может принимать информацию об объеме от устройства 44 для измерения объема относительно объема хирургической жидкости, присутствующей в раковине, до, во время и после добавления свежей хирургической жидкости в раковине 14. Контроллер 42 может определять объем хирургической жидкости, присутствующей в раковине 14, на основании информации об объеме, полученной от устройства 44 для измерения объема. Контроллер 42 может сохранить данные об определенном объеме в памяти 54. В ответ на получение первого указания о том, что клиницист намерен добавить свежую хирургическую жидкость в раковину 14, контроллер 42 может принимать информацию об объеме от устройства 44 для измерения объема, указывающую на увеличение объема хирургической жидкости, присутствующей в раковине 14. Изменение объема может быть вызвано тем, что клиницист добавляет свежую хирургическую жидкость в раковину 14. После получения второго указания о том, что клиницист завершил добавление хирургической жидкости в раковину 14, контроллер 42 может получать обновленную информацию об объеме от устройства 44 для измерения объема, указывающую объем хирургической жидкости, присутствующей в раковине 14. Обновленная информация об объеме включает данные об увеличении объема в связи с добавлением клиницистом свежей хирургической жидкости в раковину. Таким образом, контроллер 42 может различать ситуации, когда увеличение объема жидкости в раковине 14 связано с добавлением клиницистом свежей жидкости в раковину, и ситуациями, когда увеличение связано с возвратом клиницистом неиспользованной хирургической жидкости, ранее выведенной из раковины.
[00128] Во время работы контроллер 42 может обнаруживать значительное увеличение объема, которое было бы больше, чем обычно ожидалось бы, путем возврата нежидкостного компонента в раковину 14 и/или возврата жидкости, выведенной из раковины, обратно в раковину. Например, свежая хирургическая жидкость часто поставляется в контейнерах, объем которых составляет 500 г или 1000 г. В случае, когда пользователь должен был добавить свежую жидкость из контейнера в раковину 14, в то же время игнорируя первоначальное предоставление системе пользовательского ввода, указывающего, что будет добавлена свежая жидкость, контроллер 42 может быть запрограммирован на автоматическое (например, без взаимодействия пользователя со средством пользовательского ввода/интерфейсом) обозначение того, что указанный большой вес и/или объем увеличивается вследствие добавления свежей жидкости в раковину. Например, контроллер 42 может автоматически обозначать большие увеличения объема и/или веса, превышающего пороговое значение вследствие добавления свежей жидкости, а не жидкостного компонента или извлеченной жидкости, возвращаемой в раковину. Пороговое значение может представлять собой объем, составляющий более 400 мл (или 400 г), например, объем более 450 мл (или 450 г) или объем, больший или равный 500 мл (или 500 г). Могут использоваться другие пороговые значения. При такой конфигурации контроллер 42 может управлять дисплеями для предоставления пользователю запроса о том, является ли обнаруженный большой объем хирургической жидкостью, которая была добавлена в раковину, и, если пользователь не отвечает по прошествии порогового времени, контроллер может автоматически обозначить большое изменение объема как свежую жидкость и сохранить данные об увеличении объема в памяти.
[00129] Во время медицинской процедуры контроллер 42 может периодически или непрерывно получать информацию о объеме от устройства 44 для измерения объема, указывающую текущий объем хирургической жидкости, присутствующей в раковине 14. Например, контроллер 42 может получить информацию об измерении начального объема от устройства 44 для измерения объема в начале медицинской процедуры, например, с указанием количества хирургической жидкости, первоначально размещенной в раковине 14. В течение одного или более периодов времени измерения (например, непрерывно) во время медицинской процедуры контроллер 42 может получать обновленную информацию об объеме от устройства 44 для измерения объема, указывающую текущий объем хирургической жидкости, присутствующей в раковине 14 во время измерения. Контроллер 42 может сравнить объем хирургической жидкости, присутствующей в раковине 14, во время измерения, с общим объемом свежей хирургической жидкости, добавленной в раковину (начальный объем хирургической жидкости, размещенной в раковине 14, и любой свежей хирургической жидкости, впоследствии добавленной в раковину). Общий объем свежей хирургической жидкости, добавленной в раковину 14, может контролироваться контроллером 42 и храниться в памяти 54. Путем определения разницы между текущим объемом хирургической жидкости во время измерения и общим объемом свежей хирургической жидкости, добавленной в раковину на момент измерения, контроллер 42 может определить объем хирургической жидкости, используемой во время медицинской процедуры, на момент измерения.
[00130] В некоторых примерах контроллер 42 управляет дисплеем, связанным с пользовательским интерфейсом 16, и/или дисплеем 18 для отображения количества хирургической жидкости, используемой во время процедуры. В разных примерах контроллер 42 может управлять дисплеем для отображения веса и/или объема хирургической жидкости, используемой во время медицинской процедуры, на момент измерения. Контроллер 42 может непрерывно обновлять дисплей, например, когда жидкость удаляется из раковины 14 клиницистом, для предоставления клиницисту информации в режиме реального времени, указывающей количество хирургической жидкости, используемой во время процедуры.
[00131] Как упоминалось выше, контроллер 42 в примере, проиллюстрированном на фиг. 6, соединен с возможностью связи с бесконтактным считывающим устройством 50. Бесконтактное считывающее устройство 50 выполнено с возможностью считывания информации, хранящейся на бесконтактной метке, присутствующей на хирургической простыне, размещенной на раковине 14. Хотя бесконтактная метка может быть размещена так, чтобы находиться в физическом контакте с бесконтактным считывающим устройством 50, считывающее устройство может быть выполнено с возможностью считывания информации с метки, путем размещения метки в непосредственной близости от считывающего устройства без физического контакта со считывающим устройством. В одном примере бесконтактное считывающее устройство 50 реализовано как считывающее устройство, выполненное по технологии коммуникации ближнего поля (NFC). В другом примере бесконтактное считывающее устройство 50 представляет собой считыватель меток частотной идентификации (RFID) или оптический считыватель.
[00132] Независимо от конкретной конфигурации бесконтактного считывающего устройства 50, считывающее устройство может считывать идентификационную информацию, хранящуюся в машиночитаемой метке, присутствующей на хирургической простыне, размещенной на раковине 14. Идентификационная информация может быть представлена в виде числового кода, наименования производителя или товарного знака или другой информации, идентифицирующей происхождение и/или тип хирургической простыни, к которой прикреплена машиночитаемая метка. Контроллер 42 может управлять бесконтактным считывающим устройством 50, чтобы считывать идентифицирующую информацию с машиночитаемой метки, присутствующей на хирургической простыне, размещенной на раковине 14. Контроллер 42 может сравнивать идентифицирующую информацию с информацией аутентификации, хранящейся в памяти 54. Информация аутентификации может предоставлять соответствующие числовые коды или другую информацию, подходящую для определения того, разрешено ли использование хирургической простыни в раковине 14 для использования в раковине. В случае, когда контроллер 42 определяет, что идентифицирующая информация, считанная с машиночитаемой метки на хирургической простыне, соответствует информации аутентификации, хранящейся в памяти, контроллер может позволить системе 10 продолжать работу. Например, контроллер 42 может позволить устройству 46 для термической обработки регулировать температуру раковины 14 и/или устройству 44 для измерения объема измерять объем хирургической жидкости, присутствующей в раковине.
[00133] В отличие от этого, в случае, когда контроллер 42 определяет, что идентифицирующая информация, считанная с машиночитаемой метка на хирургической простыне, не соответствует информации аутентификации, хранящейся в памяти, контроллер может запретить работу системы 10. Например, контроллер 42 может запретить устройству 46 для термической обработки регулировать температуру раковины 14 и/или устройству 44 для измерения объема измерять объем хирургической жидкости, присутствующей в раковине. В некоторых дополнительных примерах, если бесконтактное считывающее устройство 50 не идентифицирует машиночитаемую метку, например, указывающую, что хирургическая простыня не была размещена на раковине 14 или хирургическая простыня без машиночитаемой метки была размещена на раковине, контроллер 42 аналогичным образом запрещает работу системы 10.
[00134] В некоторых примерах контроллер 42 может запускать таймер и/или время запуска может быть записано в метку 38 (например, посредством бесконтактного считывающего устройства 50 с функцией записи) после обнаружения того, что хирургическая простыня, размещенная на раковине 14, обладает разрешенной меткой. После того как прошло пороговое количество времени, исходя из показаний таймера и/или времени запуска, записанного на метке, контроллер 42 может определить, что срок службы метки и соответствующей хирургической простыни истек. Пороговое количество времени может составлять от 1 часа до 24 часов, например, от 4 часов до 18 часов или от 6 часов до 14 часов. Контроллер 42 может управлять пользовательским интерфейсом 16, чтобы предоставить предупреждение о времени до истечения срока службы метки и хирургической простыни (например, один час, полчаса, пятнадцать минут до истечения срока службы). Когда определено, что срок службы метки и соответствующей хирургической простыни истек, контроллер 42 может управлять устройством 46 для термической обработки, чтобы прекратить нагрев раковины 14. Такая конфигурация может содействовать тому, что хирургическую простыню, покрывающую раковину 14, периодически заменяют свежей хирургической простыней для содействия стерильности и помощи в обеспечении целостности хирургической простыни.
[00135] На фиг. 7 проиллюстрирована блок-схема приведенного в качестве примера метода, который может использоваться для контроля за количеством хирургической жидкости, удаленной из устройства для термической обработки во время медицинской процедуры. Приведенный в качестве примера метод, проиллюстрированный на фиг. 7, описан в отношении системы для термической обработки 10, описанной со ссылкой на фиг. 1-3 и 6, хотя этот метод может быть выполнен системами, имеющими конфигурации, отличающиеся от тех, что описаны в настоящем документе. В примере, проиллюстрированном на фиг. 7, клиницист задействует пользовательский ввод в системе 10 для указания того, что пользователь намеревается добавить жидкость в раковину 14 (100). Клиницист может задействовать пользовательский ввод путем взаимодействия с пользовательским интерфейсом 16 или путем приведения в действие ножного педального приводного устройства 40. В ответ на задействование пользовательского ввода контроллер 42 принимает первое указание, указывающее, что пользователь намеревается добавить хирургическую жидкость в раковину (102). Контроллер 42 может управлять дисплеем в системе 10, предоставляя пользователю команды или напоминания о добавлении хирургической жидкости в раковину 14.
[00136] В методе, проиллюстрированном на фиг. 7, клиницист добавляет хирургическую жидкость в раковину 14 (104). Контроллер 42 получает информацию об объеме от устройства 44 для измерения объема, в то время как клиницист добавляет хирургическую жидкость в раковину, с указанием увеличения объема (106). Когда устройство 44 для измерения объема является устройством взвешивания, контроллер 42 может получать информацию о весе в отношении веса раковины 14 и материала в ней. Когда клиницист завершил добавление хирургической жидкости в раковину 14, клиницист снова задействует пользовательский ввод в систему 10 для указания того, что пользователь завершил добавление хирургической жидкости в раковину 14 (108). Клиницист может снова задействовать пользовательский ввод путем взаимодействия с пользовательским интерфейсом 16 или путем приведения в действие педального приводного устройства 40. В ответ на задействование пользовательского ввода контроллер 42 получает второе указание, указывающее, что пользователь завершил добавление жидкости в раковину (110).
[00137] Способ, проиллюстрированный на фиг. 7, дополнительно содержит контроллер 42, определяющий объем хирургической жидкости, добавленной в раковину 14 в период между моментом, когда клиницист задействовал пользовательский интерфейс для указания того, что жидкость будет добавлена в раковину, и моментом, когда клиницист задействовал пользовательский интерфейс для указания того, что жидкость была добавлена в раковину (112). Например, когда устройство 44 для измерения объема является устройством взвешивания, контроллер 42 может определять разницу в весе между раковиной 14 и материалом в ней (например, медицинские инструменты с хирургической жидкостью или без хирургической жидкости) до получения первого указания, и весом раковины и материалом в ней, включая хирургическую жидкость, после получения второго указания. Контроллер 42 может определять объем жидкости, добавляемой в раковину 14, путем умножения изменения веса на плотность хирургической жидкости, хранящейся в памяти 54.
[00138] Во время работы системы 10 клиницист удаляет хирургическую жидкость из раковины 14 в методе, проиллюстрированном на фиг. 7 (114). Контроллер 42 получает информацию об измерении объема от устройства 44 для измерения объема, указывающую изменение объема, присутствующего в раковине 14, когда клиницист удаляет жидкость (116). Например, когда устройство 44 для измерения объема генерирует информацию об объеме во время измерения, контроллер 42 может получать информацию об измерении объема и определять объем хирургической жидкости в раковине во время измерения. Когда устройство 44 для измерения объема является устройством взвешивания, контроллер 42 может получать информацию о весе, указывающую вес раковины 14 и материала в ней. Контроллер 42 может определять изменение общего объема жидкости в раковине 14, например, путем определения разницы в весе и умножения изменения веса на плотность хирургической жидкости, хранящейся в памяти 54. В некоторых примерах контроллер 42 дополнительно контролирует дисплей в системе 10 для указания объема жидкости, потребляемой во время процедуры.
[00139] Кроме того, в методе, проиллюстрированном на фиг. 7, клиницист задействует пользовательский ввод в системе 10 для указания того, что пользователь намеревается добавить медицинское оборудование (например, медицинский инструмент) в раковину 14 или удалить медицинское оборудование из раковины (118). Клиницист может задействовать пользовательский ввод, взаимодействуя с пользовательским интерфейсом 16. В ответ на задействование пользовательского ввода контроллер 42 получает первое указание, указывающее, что пользователь намеревается добавить медицинское оборудование в раковину 14 или удалить медицинское оборудование из раковины (120). Клиницист впоследствии добавляет медицинское оборудование в раковину или удаляет медицинское оборудование из раковины (122).
[00140] Когда клиницист завершает добавление медицинского оборудования в раковину 14 или удаление медицинского оборудования из раковины, клиницист снова задействует пользовательский ввод на пользовательском интерфейсе 16 для указания того, что пользователь завершил добавление или удаление медицинского оборудования (124). В ответ на задействование пользовательского ввода контроллер 42 получает второе указание, указывающее, что пользователь завершил добавление медицинского оборудования в раковину 14 или удаление медицинского оборудования из раковины (126). Затем контроллер 42 может определить изменения измеренного объема хирургической жидкости в раковине 14 между моментом, когда клиницист задействовал интерфейс пользователя для указания того, что медицинское оборудование будет добавлено в раковину или удалено из раковины, и моментом, когда клиницист задействовал пользовательский интерфейс для указания того, что было завершено изменение оборудования (128). Например, когда устройство 44 для измерения объема является устройством взвешивания, контроллер 42 может определять разницу в весе между раковиной 14 и ее материалом до получения первого указания и в весе между раковиной и ее материалом после получения второго указания. Изменение веса может быть связано с добавлением медицинского оборудования в раковину или удалением медицинского оборудования из раковины 14 вместо любого добавления медицинской жидкости в раковину или удаления медицинской жидкости из раковины.
[00141] В методе, проиллюстрированном на фиг. 7, контроллер 42 игнорирует изменения измеренного объема между моментом, когда клиницист задействовал пользовательский интерфейс для указания того, что медицинское оборудование будет добавлено в раковину или удалено из раковины, и моментом, когда клиницист задействовал пользовательский интерфейс для указания того, что было завершено изменение оборудования (130). Контроллер 42 может игнорировать изменения объема, ссылаясь на объем хирургической жидкости, который, как определено, присутствует в раковине 14, до получения первого указания (например, также сохраненного в памяти 54) и установки сохраненного объема в качестве фактического объема, присутствующего в раковине после того, как медицинское оборудование было добавлено в раковину или удалено из раковины 14. Соответственно, контроллер 42 может управлять дисплеем системы 10 для достижения объема хирургической жидкости, потребляемой во время процедуры, и информация на дисплее не изменяется при добавлении медицинского оборудования в раковину 14 или удалении медицинского оборудования из раковины.
[00142] На фиг. 8A проиллюстрирован приведенный в качестве примера пользовательский интерфейс 150, который может использоваться как пользовательский интерфейс 16 в системе 10. Пользовательский интерфейс 150 содержит кнопку 152 питания, чтобы включать и выключать систему 10, первое средство 154 пользовательского ввода, второе средство 156 пользовательского ввода, средство 158 регулирования температуры и дисплей 160. Как первое средство 154 пользовательского ввода, так и второе средство 156 пользовательского ввода проиллюстрировано в виде нажимаемых кнопок, хотя могут использоваться другие пользовательские конфигурации средств пользовательского ввода, как описано в настоящем документе. Средство 158 регулирования температуры позволяет клиницисту установить целевую температуру, до которой нагревается хирургическая жидкость в раковине 14, включая увеличение и уменьшение целевой температуры. Кроме того, пользовательский интерфейс 150 содержит индикатор 155 температуры, который указывает, когда температура хирургической жидкости в раковине 14 соответствует целевой температуре (например, путем включения/выключения или путем изменения цвета). Пользовательский интерфейс 150 также содержит кнопку 153 сервисов, которая позволяет пользователю переключать дисплей 160 на меню сервисов/опций, из которого могут быть выбраны различные опции и предпочтительные варианты программирования.
[00143] Первое средство 154 пользовательского ввода выполнено с возможностью манипулирования (например, путем нажатия) клиницистом для указания того, что нежидкостный компонент, такой как медицинские инструменты, должен быть добавлен в раковину или удален из раковины 14. Нажатие первого средства 154 пользовательского ввода в первый раз сообщает системе 10 о том, что медицинский инструмент должен быть добавлен в раковину или удален из раковины 14. Нажатие первого средства 154 пользовательского ввода во второй раз сообщает системе 10 о том, что клиницист завершил добавление медицинского инструмента в раковину 14 или удаление медицинского инструмента из раковины (независимо от того, действительно ли клиницист добавляет или удаляет инструмент).
[00144] Второе средство 156 пользовательского ввода выполнено с возможностью манипулирования (например, путем нажатия) клиницистом для указания того, что в раковину 14 добавляется свежая хирургическая жидкость. Нажатие второго средства 156 пользовательского ввода в первый раз сообщает системе 10 о том, что необходимо добавить хирургическую жидкость в раковину 14. Нажатие второго средства 156 пользовательского ввода во второй раз сообщает системе 10 о том, что клиницист завершил добавление хирургической жидкости в раковину 14 (независимо от того, действительно ли клиницист добавляет жидкость). Клиницист может задействовать ножное педальное приводное устройство 40 вместо второго средства 156 пользовательского ввода для сообщения системе о том, что хирургическая жидкость должна быть добавлена в раковину 14 и/или была добавлена в раковину.
[00145] Дисплей 160 может отображать информацию, введенную или сгенерированную системой 10. Например, в соответствии с фиг. 8А, дисплей 160 отображает целевую температуру 162, введенную в систему 10 посредством средства 158 регулирования температуры, а также фактическую температуру 164 хирургической жидкости в раковине 14, измеренную датчиком 48 температуры (фиг. 6). К тому же, дисплей 160 отображает общий (кумулятивный) объем 166 хирургической жидкости, добавленной в раковину 14 во время процедуры, и объем хирургической жидкости 168, использованной (удаленной) из хирургической раковины во время процедуры. Соответственно, разница между общим объемом хирургической жидкости 166, добавленной в раковину 14, и объемом использованной хирургической жидкости 168 представляет собой объем оставшейся в раковине хирургической жидкости. В других конфигурациях дисплей 160 может отображать количество хирургической жидкости, добавленной в раковину 14 и/или удаленной из раковины, в разных форматах, например, по весу, диаграмме или тому подобному.
[00146] На фиг. 8В проиллюстрирован приведенный в качестве примера дисплей 170, который может использоваться как дисплей 18 в системе 10. Как проиллюстрировано, дисплей 170 может быть выполнен с возможностью отображения той же информации, что и дисплей 160 на пользовательском интерфейсе 150. Однако, как обсуждалось выше, дисплей 170 может быть расположен на иной стороне раковины 14, чем пользовательский интерфейс 150, что позволяет клиницистам, работающим с разных сторон раковины, видеть информацию, введенную или сгенерированную системой.
[00147] Методы, описанные в настоящем раскрытии изобретения, могут быть реализованы, по меньшей мере частично, в аппаратном обеспечении, программном обеспечении, аппаратно-программном обеспечении или любой их комбинации. Например, различные аспекты описанных методов могут быть реализованы в одном или более процессорах, включая один или более микропроцессоров, цифровых сигнальных процессоров (DSP), специализированных интегральных схем (ASIC), программируемых пользователем вентильных матриц (FPGA) или любых других эквивалентных интегральных или дискретных логических схем, а также любых комбинациях таких компонентов. Термин «процессор» обычно может относиться к любой из вышеперечисленных логических схем, отдельно или в комбинации с другой логической схемой или любой другой эквивалентной схемой. Блок управления, содержащий аппаратное обеспечение, может также выполнять один или более методов в соответствии с настоящим раскрытием изобретения.
[00148] Такое аппаратное обеспечение, программное обеспечение и аппаратно-программное обеспечение могут быть реализованы в одном и том же устройстве или в отдельных устройствах для поддержки различных операций и функций, описанных в настоящем раскрытии изобретения. Кроме того, любой из описанных блоков, модулей или компонентов может быть реализован совместно или отдельно как дискретные, но совместимые логические устройства. Описание различных функций как модулей или блоков предназначено для освещения различных функциональных аспектов и не обязательно подразумевает, что такие модули или блоки должны быть реализованы посредством отдельных аппаратных или программных компонентов. Скорее, функциональные возможности, связанные с одним или более модулями или модулями, могут осуществляться посредством отдельных компонентов аппаратного обеспечения или программного обеспечения или могут быть интегрированы в общих или отдельных компонентах аппаратного обеспечения или программного обеспечения.
[00149] Методы, описанные в настоящем раскрытии изобретения, также могут быть воплощены или запрограммированы в энергонезависимом машиночитаемом носителе, таком как машиночитаемый носитель данных, содержащий инструкции. Инструкции, внедренные или запрограммированные в машиночитаемом носителе данных, могут предписывать программируемому процессору или другому процессору выполнение этого способа, например, при выполнении инструкций. Энергонезависимый машиночитаемый носитель данных может содержать энергозависимые и/или энергонезависимые формы памяти, включая, например, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электронно-стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, жесткий диск, CD-ROM, гибкий диск, кассету, магнитные носители, оптические носители или другие машиночитаемые носители.
[00150] Ранее были описаны различные примеры. Эти и другие примеры подпадают под объем следующей формулы изобретения.
Реферат
Группа изобретений относитсяк медицинской технике. Система термической обработки содержит раковину, имеющую дно и по меньшей мере одну боковую стенку, которая выполнена с возможностью приема и удержания материала. Устройство для термической обработки находится в тепловом контакте с раковиной и выполнено с возможностью регулирования температуры материала в раковине. Крепежная плита имеет первую сторону и вторую сторону, противоположную первой стороне. Крепежная плита прикреплена к раковине с воздушным зазором, образованным между первой стороной крепежной плиты и дном раковины. Устройство для измерения веса расположено на второй стороне крепежной плиты и выполнено с возможностью измерения веса раковины и материала в ней. Раскрыт альтернативный вариант выполнения системы термической обработки. Технический результат состоит в снижении риска непреднамеренной гипотермии. 2 н. и 28 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и устройство для стерилизации жидкости
Комментарии