Устройство для гидравлического управления масляным насосом транспортного средства и способ гидравлического управления масляным насосом транспортного средства - RU2691573C2
Код документа: RU2691573C2
Чертежи
















Описание
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству гидравлического управления и к способу гидравлического управления для транспортного средства, которые позволяют подавать гидравлическое давление в модуль привода транспортного средства с использованием механического масляного насоса переменной производительности, приводимого в действие посредством двигателя транспортного средства.
2. Описание предшествующего уровня техники
[0002] Обычно, гидравлическое давление нагнетания электрического масляного насоса (EOP), смонтированного в транспортных средствах, может управляться посредством управления частотой вращения электромотора, который представляет собой актуатор EOP. Напротив, гидравлическое давление нагнетания механического масляного насоса (MOP), смонтированного в транспортных средствах, не может управляться, поскольку оно зависит от частоты вращения двигателя. Тем не менее, гидравлическое давление нагнетания механического масляного насоса переменной производительности (MOP переменной производительности) может управляться, хотя оно зависит от частоты вращения двигателя. При таких обстоятельствах, публикация заявки на патент (Япония) номер 2016-011680 раскрывает изобретение, выполненное с возможностью определять фактическое гидравлическое давление нагнетания MOP переменной производительности с использованием датчика гидравлического давления, вычислять целевое гидравлическое давление нагнетания на основе частоты вращения двигателя и коэффициента загрузки и управлять с обратной связью фактическим гидравлическим давлением нагнетания, чтобы достигать целевого гидравлического давления нагнетания, на основе разности между фактическим гидравлическим давлением нагнетания и целевым гидравлическим давлением нагнетания.
Сущность изобретения
[0003] Тем не менее, для того чтобы управлять с обратной связью фактическим гидравлическим давлением нагнетания MOP переменной производительности таким образом, чтобы достигать целевого гидравлического давления нагнетания, требуется измерительное устройство фактического гидравлического давления нагнетания, такое как датчик гидравлического давления. Соответственно, становятся необходимыми затраты и пространство для расположения для измерительного устройства фактического гидравлического давления нагнетания. Когда частота вращения двигателя увеличивается, и в силу этого объем утечки масла из MOP переменной производительности увеличивается, фактическое гидравлическое давление нагнетания опускается ниже целевого гидравлического давления нагнетания. Соответственно, выполняется управление для того, чтобы увеличивать целевой объем масла нагнетания. Тем не менее, когда целевой объем масла нагнетания увеличивается после того, как определяется недостаток фактического гидравлического давления нагнетания, имеется запаздывание во времени до тех пор, пока не разрешается недостаток фактического гидравлического давления нагнетания. Это вызывает проблему с точки зрения скорости отклика управления механическим масляным насосом переменной производительности.
[0004] Настоящее изобретение представляет собой устройство гидравлического управления транспортного средства, допускающее управление механическим масляным насосом переменной производительности с достаточной скоростью отклика без использования измерительного устройства фактического гидравлического давления нагнетания.
[0005] Согласно одному аспекту изобретения, включает в себя устройство гидравлического управления для транспортного средства. Транспортное средство включает в себя двигатель и трансмиссию. Устройство гидравлического управления включает в себя: механический масляный насос переменной производительности, приводимый в действие посредством двигателя и выполненный с возможностью подавать гидравлическое давление в модуль привода транспортного средства, электронный модуль управления, выполненный с возможностью (i) вычислять целевой объем нагнетания механического масляного насоса переменной производительности с использованием множества параметров трансмиссии, и (ii) управлять механическим масляным насосом переменной производительности на основе целевого объема нагнетания. Согласно одному аспекту изобретения, включает в себя способ гидравлического управления для транспортного средства. Транспортное средство включает в себя: двигатель, трансмиссию, механический масляный насос переменной производительности, приводимый в действие посредством двигателя и выполненный с возможностью подавать гидравлическое давление в модуль привода транспортного средства; и электронный модуль управления. Способ гидравлического управления включает в себя (i) вычисление, посредством электронного модуля управления, целевого объема нагнетания механического масляного насоса переменной производительности с использованием множества параметров трансмиссии, и (ii) управление, посредством электронного модуля управления, механическим масляным насосом переменной производительности на основе целевого объема нагнетания. Множество параметров могут включать в себя, по меньшей мере, одно из целевого входного крутящего момента трансмиссии транспортного средства, целевого объемного расхода нагнетания механического масляного насоса переменной производительности и частоты вращения входного вала транспортного средства.
[0006] Электронный модуль управления может быть выполнен с возможностью вычислять объемную эффективность механического масляного насоса переменной производительности из целевого входного крутящего момента трансмиссии и из частоты вращения входного вала и задавать целевой объем нагнетания большим по мере того, как объемная эффективность становится более низкой.
[0007] Такая конфигурация позволяет вычислять целевой объем нагнетания механического масляного насоса переменной производительности с учетом объема утечки масла из механического масляного насоса переменной производительности. Соответственно, даже когда объем утечки масла из механического масляного насоса переменной производительности увеличивается по мере того, как частота вращения двигателя становится более высокой, механический масляный насос переменной производительности может управляться с достаточной скоростью отклика по сравнению со случаем выполнения управления с обратной связью механическим масляным насосом переменной производительности.
[0008] Устройство гидравлического управления дополнительно может включать в себя электрический масляный насос, выполненный с возможностью подавать гидравлическое давление в модуль привода. Электронный модуль управления может быть выполнен с возможностью: (i) вычислять объем расхода топлива двигателя, соответствующий приращению величины электрической мощности приведения в действие электрического масляного насоса, когда электрический масляный насос приведется в действие в рабочей точке, более эффективной по сравнению с текущей рабочей точкой; (ii) сравнивать объем расхода топлива двигателя, соответствующий приращению величины электрической мощности приведения в действие электрического масляного насоса, с величиной уменьшения расхода топлива двигателя, вызываемого посредством уменьшения объемного расхода нагнетания механического масляного насоса переменной производительности; и (iii) когда величина уменьшения превышает расход топлива, соответствующий приращению величины электрической мощности приведения в действие электрического масляного насоса, приводить в действие электрический масляный насос в рабочей точке, более эффективной по сравнению с текущей рабочей точкой, с приведением в действие механического масляного насоса переменной производительности таким образом, что объемный расход нагнетания механического масляного насоса переменной производительности снижается.
[0009] Согласно такой конфигурации, электрический масляный насос приводится в действие в точке приведения в действие, более эффективной по сравнению с текущей рабочей точкой, и объемный расход нагнетания механического масляного насоса переменной производительности снижается. Следовательно, может повышаться эффективность использования топлива.
[0010] Электронный модуль управления может быть выполнен с возможностью задавать целевой объем нагнетания механического масляного насоса переменной производительности равным максимальному объему нагнетания, когда подача топлива в двигатель прекращается.
[0011] Согласно такой конфигурации, целевой объем нагнетания механического масляного насоса переменной производительности задается равным максимальному объему нагнетания, когда подача топлива в двигатель прекращается. Соответственно, нагрузка электрического масляного насоса может снижаться, и потребление мощности электрического масляного насоса может уменьшаться, что позволяет подавлять ухудшение эффективности использования топлива.
[0012] Согласно устройству гидравлического управления транспортного средства согласно настоящему изобретению, целевой объем нагнетания механического масляного насоса переменной производительности вычисляется с использованием параметра относительно модуля привода транспортного средства, и механический масляный насос переменной производительности управляется на основе вычисленного целевого объема нагнетания. Это позволяет управлять механическим масляным насосом переменной производительности с достаточной скоростью отклика без использования измерительного устройства фактического гидравлического давления нагнетания.
Краткое описание чертежей
[0013] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схематичным видом, иллюстрирующим один пример конфигурации транспортного средства, включающего устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения;
Фиг. 2 является принципиальной схемой, иллюстрирующей конфигурацию гидравлической схемы, проиллюстрированной на фиг. 1;
Фиг. 3 является схематичным видом, иллюстрирующим один пример конфигурации MOP переменной производительности, проиллюстрированного на фиг. 1;
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки гидравлического управления, которая является одним вариантом осуществления настоящего изобретения;
Фиг. 5 является управляющей блок-схемой последовательности операций способа для описания последовательности операций обработки гидравлического управления, которая является одним вариантом осуществления настоящего изобретения;
Фиг. 6 является схематичным видом для описания способа вычисления для целевого объемного расхода CVT;
Фиг. 7 является схематичным видом для описания способа вычисления для целевого объема нагнетания MOP переменной производительности;
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является первым вариантом осуществления настоящего изобретения;
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является вторым вариантом осуществления настоящего изобретения;
Фиг. 10 является пояснительным видом, иллюстрирующим модификацию обработки гидравлического управления, которая является одним вариантом осуществления настоящего изобретения;
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки управления объемным расходом нагнетания, которая является одним вариантом осуществления настоящего изобретения;
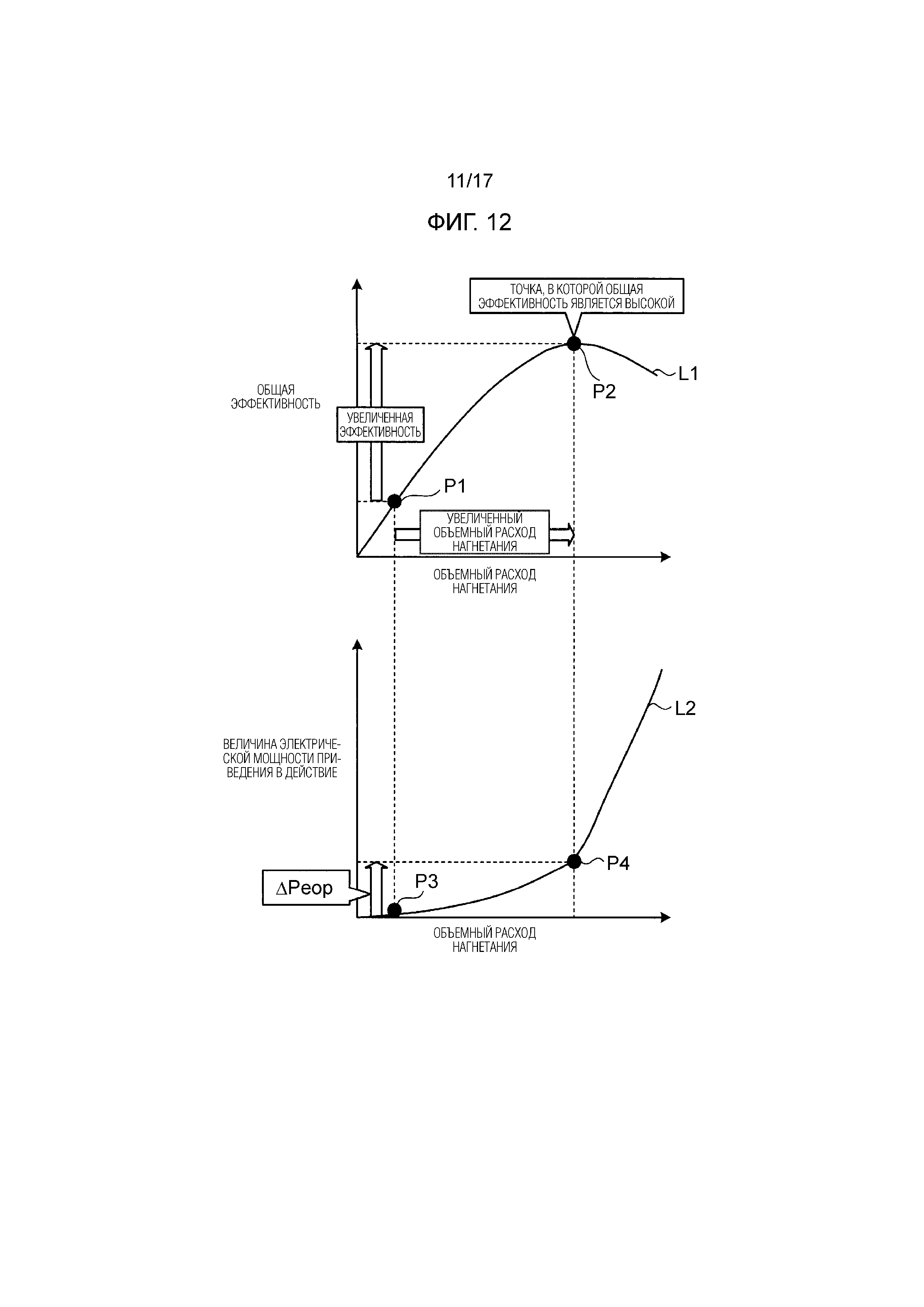
Фиг. 12 является пояснительным видом, иллюстрирующим обработку управления объемным расходом нагнетания, которая является одним вариантом осуществления настоящего изобретения;
Фиг. 13 иллюстрирует один пример временного изменения требуемого объемного расхода для системы поддержания давления в магистрали и требуемого объемного расхода для системы поддержания давления смазки по сравнению с временным изменением частоты вращения двигателя;
Фиг. 14 иллюстрирует величины потока нагнетания MOP переменной производительности и EOP при обработке управления объемным расходом нагнетания в традиционном примере и в настоящем изобретении;
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки управления объемом нагнетания, которая является одним вариантом осуществления настоящего изобретения;
Фиг. 16 иллюстрирует один пример временного изменения требуемого объемного расхода для системы поддержания давления в магистрали и требуемого объемного расхода для системы поддержания давления смазки по сравнению с временным изменением частоты вращения двигателя;
Фиг. 17 иллюстрирует величины потока нагнетания MOP переменной производительности и EOP при обработке управления объемом нагнетания в традиционном примере и в настоящем изобретении; и
Фиг. 18 является схематичным видом, иллюстрирующим другой пример конфигурации транспортного средства, включающего устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0014] Ниже поясняется конфигурация и работа устройства гидравлического управления транспортного средства согласно одному варианту осуществления настоящего изобретения со ссылкой на чертежи.
[0015] Далее приводится описание одного примера конфигурации транспортного средства, которое включает устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения, со ссылкой на фиг. 1.
[0016] Фиг. 1 является схематичным видом, иллюстрирующим один пример конфигурации транспортного средства, включающего устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения. Как проиллюстрировано на фиг. 1, транспортное средство Ve, которое включает устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения, включает в себя двигатель 1 (ENG) в качестве источника мощности для движения. Мощность, расходуемая на движение, выводимая из двигателя 1, передается на ведущие колеса 10 через преобразователь 2 крутящего момента, входной вал 3, механизм 4 переключения переднего-заднего хода, ременную бесступенчатую трансмиссию 5 (CVT), выходной вал 6, зубчатый механизм 7 обратного вала, дифференциальную шестерню 8 и оси 9. Транспортное средство Ve включает устройство 100 гидравлического управления, которое подает гидравлическое давление в точки назначения подачи гидравлического давления модуля привода транспортного средства Ve. Устройство 100 гидравлического управления выступает в качестве устройства гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения.
[0017] Преобразователь 2 крутящего момента представляет собой гидравлическое трансмиссионное устройство, внутренняя часть которого заполнена рабочей жидкостью (маслом). Преобразователь 2 крутящего момента управляется посредством устройства 100 гидравлического управления. Преобразователь 2 крутящего момента включает в себя рабочее колесо 21 насоса, вращающееся как единое целое с коленчатым валом 11, рабочее колесо 22 турбины, расположенное обращенным к рабочему колесу 21 насоса, статор 23, расположенный между рабочим колесом 21 насоса и рабочим колесом 22 турбины, и блокировочную муфту 24 (LU-муфту).
[0018] Рабочее колесо 22 турбины соединяется таким образом, что оно вращается как единое целое с входным валом 3 (IN). Когда LU-муфта 24 зацепляется, рабочее колесо 21 насоса и рабочее колесо 22 турбины вращаются как единое целое, так что двигатель 1 непосредственно сцеплен с входным валом 3. Когда LU-муфта 24 расцепляется, мощность, расходуемая на движение, выводимая из двигателя 1, передается в рабочее колесо 22 турбины через рабочую жидкость. Статор 23 удерживается в картере через одностороннюю муфту.
[0019] Рабочее колесо 21 насоса соединяется с двухпортовым механическим масляным насосом 201 переменной производительности (MOP переменной производительности). MOP 201 переменной производительности, который соединяется с двигателем 1 через рабочее колесо 21 насоса, приводится в действие посредством двигателя 1. MOP 201 переменной производительности и рабочее колесо 21 насоса могут соединяться через трансмиссионный механизм, к примеру, ременной механизм.
[0020] Входной вал 3 соединяется с механизмом 4 переключения переднего-заднего хода, который состоит из планетарного зубчатого механизма с двойными сателлитами. Когда выходной крутящий момент двигателя 1 передается на ведущие колеса 10, механизм 4 переключения переднего-заднего хода переключает направление крутящего момента, действующего на ведущее колесо 10, на прямое направление или обратное направление. Механизм 4 переключения переднего-заднего хода включает в себя солнечную шестерню 4S, коронную шестерню 4R, расположенную концентрически с солнечной шестерней 4S, и водило 4C, которое с возможностью вращения и поворачивания удерживает первую сателлитную шестерню и вторую сателлитную шестерню. Солнечная шестерня 4S соединяется таким образом, что она вращается как единое целое с входным валом 3. Водило 4C соединяется таким образом, что оно вращается как единое целое с первичным валом 54 CVT 5.
[0021] Механизм 4 переключения переднего-заднего хода включает в себя муфту C1 и тормоз B1. Муфта C1 избирательно вращает солнечную шестерню 4S и водило 4C как единое целое. Тормоз B1 избирательно закрепляет коронную шестерню 4R таким образом, что она является невращающейся. Муфта C1 и тормоз B1 являются гидравлическими. Устройство 100 гидравлического управления подает гидравлическое давление в гидравлический актуатор муфты C1 и гидравлический актуатор тормоза B1.
[0022] Когда муфта C1 зацепляется, и тормоз B1 расцепляется, весь механизм 4 переключения переднего-заднего хода вращается как единое целое, так что первичный вал 54 CVT 5 и входной вал 3 вращаются как единое целое. Когда муфта C1 расцепляется, и тормоз B1 зацепляется, солнечная шестерня 4S и водило 4C вращаются в обратном направлении, так что первичный вал 54 вращается в обратном направлении относительно входного вала 3. Когда муфта C1 расцепляется, и тормоз B1 расцепляется, механизм 4 переключения переднего-заднего хода находится в состоянии нейтрали (состоянии нейтрали). Соответственно, двигатель 1 и CVT 5 расцепляются таким образом, чтобы деактивировать крутящий момент, который должен передаваться.
[0023] CVT 5 включает в себя первичный шкив 51, вращающийся как единое целое с первичным валом 54, вторичный шкив 52, вращающийся как единое целое с выходным валом 6, и бесконечный ремень 53, намотанный вокруг клиновидных пазов шкивов 51, 52. Передаточное отношение CVT 5 непрерывно изменяется по мере того, как ширины клиновидных пазов шкивов 51, 52 изменяются, и диаметр намотки ремня 53 изменяется.
[0024] Первичный шкив 51 включает в себя неподвижный направляющий ролик 51a, интегрированный с первичным валом 54, подвижный направляющий ролик 51b, который аксиально перемещается на первичном валу 54, и гидравлический цилиндр 51c, который прикладывает осевое давление к подвижному направляющему ролику 51b. Гидравлический цилиндр 51c располагается на стороне задней поверхности подвижного направляющего ролика 51b, чтобы формировать осевое давление для движения подвижного направляющего ролика 51b к стороне неподвижного направляющего ролика 51a. Устройство 100 гидравлического управления подает гидравлическое давление в гидравлический цилиндр 51c.
[0025] Вторичный шкив 52 включает в себя неподвижный направляющий ролик 52a, интегрированный с выходным валом 6, подвижный направляющий ролик 52b, который аксиально перемещается на выходном валу 6, и гидравлический цилиндр 52c, который прикладывает осевое давление к подвижному направляющему ролику 52b. Гидравлический цилиндр 52c располагается на стороне задней поверхности подвижного направляющего ролика 52b, чтобы формировать осевое давление для движения подвижного направляющего ролика 52b к стороне неподвижного направляющего ролика 52a. Устройство 100 гидравлического управления подает гидравлическое давление в гидравлический цилиндр 52c.
[0026] Выходной вал 6 вращается как единое целое с выходной шестерней 6a. Выходной вал 6 соединяется с дифференциальной шестерней 8 через зубчатый механизм 7 обратного вала, который зацепляется с выходной шестерней 6a. Дифференциальная шестерня 8 соединяется с правым и левым ведущими колесами 10, 10 через правую и левую оси 9, 9.
[0027] Устройство 100 гидравлического управления включает в себя гидравлическую схему 200, которая подает гидравлическое давление в назначения подачи гидравлического давления транспортного средства Ve, и электронный модуль 300 управления (ниже называемый "ECU"), который электрически управляет гидравлической схемой 200.
[0028] Гидравлическая схема 200 подает масло (гидравлическое давление) в каждое из гидравлических цилиндров 51c, 52c CVT 5, гидравлических актуаторов муфты C1 и тормоза B1, внутренней части преобразователя 2 крутящего момента и частей модуля привода транспортного средства Ve, которые требуют смазки. ECU 300 выводит сигнал команды управления гидравлическим давлением в гидравлическую схему 200, чтобы управлять операцией переключения передач CVT 5 и каждого зацепляющего устройства, такого как муфта C1. Таким образом, ECU 300 электрически управляет гидравлической схемой 200 таким образом, чтобы выполнять такое управление, как управление переключением переднего и заднего хода и управление переключением передач CVT 5.
[0029] Далее описывается конфигурация гидравлической схемы 200 со ссылкой на фиг. 2.
[0030] Фиг. 2 является принципиальной схемой, иллюстрирующей конфигурацию гидравлической схемы 200. Как проиллюстрировано на фиг. 2, гидравлическая схема 200 управляет гидравлическим давлением таким образом, что оно представляет собой два управляющих давления: давление в магистрали; и давление смазки. Гидравлическая схема 200 подает масло, соответствующее каждому управляющему давлению, в назначения подачи масла модуля привода. Назначения подачи системы поддержания давления в магистрали включают в себя направляющий ролик 401, муфту 402 и преобразователь 403 крутящего момента (в дальнейшем называемый "T/C"). Назначения подачи системы поддержания давления смазки включают в себя охладитель 404 и требующую смазки область 405. Направляющий ролик 401 включает в себя каждый из гидравлических цилиндров 51c, 52c CVT 5, проиллюстрированной на фиг. 1. Муфта 402 включает в себя гидравлический актуатор муфты C1 и гидравлический актуатор тормоза B1, проиллюстрированных на фиг. 1. T/C 403 включает в себя преобразователь 2 крутящего момента, проиллюстрированный на фиг. 1. Требующая смазки область 405 включает в себя вращающиеся элементы, такие как шестерня (например, механизм 4 переключения переднего-заднего хода) модуля привода, проиллюстрированного на фиг. 1.
[0031] Гидравлическая схема 200 включает в себя MOP 201 переменной производительности и однопортовый электрический масляный насос 202 (EOP) в качестве источника подачи гидравлического давления. MOP 201 переменной производительности имеет основной порт Po1 и субпорт Po2. Масло, нагнетаемое из основного порта Po1, подается в назначения подачи системы поддержания давления в магистрали, и масло, нагнетаемое из субпорта Po2, подается в назначения подачи системы поддержания давления смазки. Между тем, EOP 202 имеет нагнетательный порт Po3. Масло, нагнетаемое из нагнетательного порта Po3, подается в назначения подачи системы поддержания давления смазки. Таким образом, в гидравлической схеме 200, схемы с использованием MOP 201 переменной производительности в качестве источника подачи гидравлического давления соединяются со схемами с использованием EOP 202 в качестве источника подачи гидравлического давления. Соответственно, можно добавлять (усиливать) объемный расход масла, нагнетаемый из EOP 202, к (с) объемному расходу масла, подаваемого в назначения подачи системы поддержания давления смазки из MOP 201 переменной производительности.
[0032] Гидравлическая схема 200 включает в себя переключающий клапан 203, который переключает соединение и разъединение линии, идущей из нагнетательного порта Po3 EOP 202 в назначения подачи системы поддержания давления смазки. В устройстве 100 гидравлического управления, то, усиливает или нет EOP 202 подачу масла в назначения подачи системы поддержания давления смазки, может переключаться посредством управления переключением переключающего клапана 203. В частности, MOP 201 переменной производительности, который приводится в действие посредством двигателя 1 (ENG), всасывает масло в маслосборнике 204 и нагнетает масло через основной порт Po1 и субпорт Po2. MOP 201 переменной производительности имеет такую конфигурацию, в которой соотношение (соотношение портов) объемного расхода нагнетания основного порта Po1 к объемному расходу нагнетания субпорта Po2 может изменяться.
[0033] Основной порт Po1 соединяется с масляным каналом 205, и субпорт Po2 соединяется с масляным каналом 206. Масляный канал 206 соединяется с масляным каналом 205 через контрольный клапан 207. Контрольный клапан 207 закрывается, когда гидравлическое давление на стороне масляного канала 206 ниже гидравлического давления на стороне масляного канала 205. Когда гидравлическое давление на стороне масляного канала 206 выше гидравлического давления на стороне масляного канала 205, контрольный клапан 207 открывается. Соответственно, когда гидравлическое давление на стороне масляного канала 206 выше гидравлического давления на стороне масляного канала 205, масло, нагнетаемое из субпорта Po2, подается в сторону масляного канала 205 через контрольный клапан 207.
[0034] Масляный канал 205 и масляный канал 206 соединяются с входной стороной клапана 208 регулирования давления в магистрали, тогда как выходная сторона клапана 208 регулирования давления в магистрали соединяется с масляным каналом 209, масляным каналом 210 и масляным каналом 211. Клапан 208 регулирования давления в магистрали управляется посредством гидравлического давления из масляного канала 205 и прижимающей силы упругого тела, так что гидравлическое давление в масляном канале 205 регулируется таким образом, что оно представляет собой целевое давление в магистрали. Когда гидравлическое давление в масляном канале 205 регулируется таким образом, что оно представляет собой целевое давление в магистрали, клапан 208 регулирования давления в магистрали нагнетает гидравлическое давление в масляном канале 205 в масляные каналы 209, 210. Масляный канал 211 соединяется с масляным каналом 210 через контрольный клапан 212. Контрольный клапан 212 закрывается, когда гидравлическое давление на стороне масляного канала 211 ниже гидравлического давления на стороне масляного канала 210. Когда гидравлическое давление на стороне масляного канала 211 выше гидравлического давления на стороне масляного канала 210, контрольный клапан 212 открывается.
[0035] Масляный канал 210 и масляный канал 211 соединяются с входной стороной клапана 213 регулирования вторичного давления, тогда как выходная сторона клапана 213 регулирования вторичного давления соединяется с масляным каналом 214. Клапан 213 регулирования вторичного давления управляется посредством гидравлического давления из масляного канала 210 и прижимающей силы упругого тела, так что гидравлическое давление в масляных каналах 209, 210 регулируется таким образом, что оно представляет собой вторичное давление. Когда гидравлическое давление в масляных каналах 209, 210 регулируется таким образом, что оно представляет собой вторичное давление, клапан 213 регулирования вторичного давления нагнетает гидравлическое давление в масляном канале 210 в масляный канал 214. Масляный канал 214 соединяется с охладителем 404 и подает масло в требующую смазки область 405 через охладитель 404.
[0036] EOP 202, который приводится в действие посредством электромотора 215 (M), всасывает масло в маслосборник 204 и нагнетает масло из нагнетательного порта Po3. Электромотор 215, который управляется с приведением в действие посредством ECU 300, электрически соединяется с аккумулятором (не проиллюстрирован). Нагнетательный порт Po3 соединяется с масляным каналом 216. Масляный канал 216 соединяется с масляным каналом 205 через контрольный клапан 217.
[0037] Масляный канал 216 соединяется с переключающим клапаном 203. Открытие и закрытие переключающего клапана 203 переключается в соответствии с сигнальным давлением, имеющим гидравлическое давление в масляном канале 205 в качестве исходного давления, причем гидравлическое давление вводится из масляного канала 218. Когда переключающий клапан 203 открывается, масло, нагнетаемое из нагнетательного порта Po3, вытекает из масляного канала 216 в масляный канал 214 через переключающий клапан 203. Масло протекает через масляный канал 214 в качестве масла давления смазки и подается в назначения подачи системы поддержания давления смазки. Когда переключающий клапан 203 закрывается, масло, нагнетаемое из нагнетательного порта Po3, вытекает из масляного канала 216 в масляный канал 205 через контрольный клапан 217.
[0038] Таким образом, переключающий клапан 203 переключается между схемами, которые подают масло, нагнетаемое из нагнетательного порта Po3 в назначения подачи системы поддержания давления смазки, и схемами, которые подают масло, нагнетаемое из нагнетательного порта Po3, в назначения подачи системы поддержания давления в магистрали. Контрольный клапан 217 закрывается, когда гидравлическое давление на стороне масляного канала 216 ниже гидравлического давления на стороне масляного канала 205. Когда гидравлическое давление на стороне масляного канала 216 выше гидравлического давления на стороне масляного канала 205, контрольный клапан 217 открывается. Соответственно, когда гидравлическое давление на стороне масляного канала 216 выше гидравлического давления на стороне масляного канала 205, масло, нагнетаемое из нагнетательного порта Po3, подается в назначения подачи системы поддержания давления в магистрали через контрольный клапан 217.
[0039] Масляный канал 205 системы поддержания давления в магистрали соединяется с клапанами 219, 220 снижения давления. Клапаны 219, 220 снижения давления подвергаются электрическому управлению посредством ECU 300. Клапан 219 снижения давления уменьшает давление в магистрали и подает уменьшенное давление в магистрали в масляный канал 221. Клапан 220 снижения давления уменьшает давление в магистрали и подает уменьшенное давление в магистрали в направляющий ролик 401.
[0040] Масляный канал 221 соединяется с соленоидными клапанами 222, 223, 224, 225. Соленоидные клапаны подвергаются электрическому управлению посредством ECU 300. Масло, проводимое через соленоидный клапан 222, подается в MOP 201 переменной производительности через масляный канал 226, так что объем нагнетания MOP 201 переменной производительности переменно управляется.
[0041] Соленоидный клапан 223 представляет собой клапан, который регулирует сигнальное давление, вводимое в клапан 220 снижения давления через масляный канал 227. Соленоидный клапан 224 представляет собой клапан, который регулирует гидравлическое давление (давление для зацепления) муфты 402. Соленоидный клапан 224 регулирует гидравлическое давление, подаваемое в муфту 402, с помощью давления в магистрали в качестве исходного давления. Масло, давление которого регулируется с помощью соленоидного клапана 224, подается в муфту 402 через масляный канал 228.
[0042] Соленоидный клапан 225 представляет собой клапан, который регулирует гидравлическое давление (давление для зацепления при блокировке) T/C 403. Соленоидный клапан 225 регулирует гидравлическое давление, подаваемое в T/C 403, с помощью давления в магистрали в качестве исходного давления. Масло, давление которого регулируется с помощью соленоидного клапана 225, подается в T/C 403 через масляный канал 229 и подается в камеру нагнетания гидравлического давления на стороне зацепления между стороной задней поверхности рабочего колеса 22 турбины и LU-муфтой 24 в T/C 403.
[0043] T/C 403 соединяется с переключающим клапаном 230. Переключающий клапан 230 регулирует гидравлическое давление, подаваемое в камеру нагнетания гидравлического давления на стороне расцепления между LU-муфтой 24 и передней крышкой в T/C 403, с помощью давления в магистрали, подаваемого из масляного канала 209 в качестве исходного давления. Таким образом, T/C 403 переключает состояние подачи давления жидкости для гидросистемы, подаваемого в камеру нагнетания гидравлического давления на стороне зацепления и в камеру нагнетания гидравлического давления на стороне расцепления с использованием соленоидного клапана 225 и переключающего клапана 230, так что рабочий режим LU-муфты 24 переключается.
[0044] Далее приводится описание конфигурации MOP 201 переменной производительности со ссылкой на фиг. 3.
[0045] Фиг. 3 является схематичным видом, иллюстрирующим один пример конфигурации MOP 201 переменной производительности. Как проиллюстрировано на фиг. 3, MOP 201 переменной производительности включает в себя корпус 201a вращательного вала, ротор 201b, множество лопастей 201c, кулачковое кольцо 201d, внешний кожух 201e, качающийся штифт 201f и пружину 201g.
[0046] Ротор 201b, который состоит из цилиндрического элемента, фиксированно соединяется с корпусом 201a вращательного вала, идущим через ротор 201b. Лопастной паз 201h формируется во множестве местоположений в периферийном направлении ротора 201b. Лопасти 201c, которые состоят из пластинчатого элемента, присоединяются в лопастных пазах 201h ротора 201b.
[0047] Верхушки лопастей 201c прижимаются и за счет этого приводятся в контакт с внутренней периферийной поверхностью 201i кулачкового кольца 201d посредством давления масла под высоким давлением, введенного в нижнее пространство 201h1 лопастных пазов 201h. По мере того, как ротор 201b вращается, лопасти 201c проскальзывают в радиальном направлении в лопастных пазах 201h и за счет этого многократно перемещаются в направлении проталкивания из лопастных пазов 201h или в направлении прижатия в лопастные пазы 201h.
[0048] Кулачковое кольцо 201d, которое состоит из трубчатого элемента, имеет внутреннюю периферийную поверхность 201i, которая формирует кулачковую поверхность, и круглую внешнюю периферийную поверхность 201j. Кулачковое кольцо 201d размещает ротор 201b и лопасти 201c во внутренней части трубчатого элемента, т.е. в области, окруженной внутренней периферийной поверхностью 201i. Масляная камера 201k формируется между внутренней периферийной поверхностью 201i и ротором 201b.
[0049] Кулачковое кольцо 201d располагается с указанной эксцентрической величиной относительно ротора 201b. Соответственно, масляная камера 201k имеет область, в которой радиальный интервал между внутренней периферийной поверхностью 201i и внешней периферийной поверхностью ротора 201b является большим, и область, в которой радиальный интервал является узким. Кулачковое кольцо 201d включает в себя выступы 201l, 201m1, 201m2, радиально выступающие из внешней периферийной поверхности 201j. Выступы 201l, 201m1, 201m2 входят в контакт с возможностью скольжения с внутренней периферийной поверхностью 201n внешнего кожуха 201e.
[0050] Качающийся штифт 201f предоставляется вдоль направления вала между внешней периферийной поверхностью 201j кулачкового кольца 201d и внутренней периферийной поверхностью 201n внешнего кожуха 201e. Качающийся штифт 201f поддерживает с возможностью качания кулачковое кольцо 201d на внутренней периферийной поверхности 201n внешнего кожуха 201e.
[0051] Пружина 201g предоставляется таким образом, что один конец пружины 201g примыкает к выступу 201l, предоставленному в кулачковом кольце 201d. Пружина 201g смещает кулачковое кольцо 201d в направлении максимизации производительности (производительности насоса) масляной камеры 201k.
[0052] В MOP 201 переменной производительности с такой конфигурацией, когда корпус 201a вращательного вала вращается посредством двигателя 1, ротор 201b вращается в то время, когда лопасти 201c проскальзывают в лопастных пазах 201h. Когда ротор 201b вращается, производительность масляной камеры 201k на стороне восходящего направления в направлении вращения ротора, которая окружена смежными лопастями 201c и внутренней периферийной поверхностью 201i кулачкового кольца 201d, увеличивается с вращением ротора 201b, так что масло в маслосборнике 204 всасывается через впускной порт Pi. Наоборот, производительность масляной камеры 201k на стороне нисходящего направления в направлении вращения ротора, которая окружена смежными лопастями 201c и внутренней периферийной поверхностью 201i кулачкового кольца 201d, уменьшается с вращением ротора 201b, так что масло нагнетается из основного порта Po1 и субпорта Po2.
[0053] MOP 201 переменной производительности с такой конфигурацией, имеет регулируемую камеру 201o нагнетания гидравлического давления, заданную посредством внутренней периферийной поверхности 201n внешнего кожуха 201e, выступов 201l, 201m1 и внешней периферийной поверхности 201j кулачкового кольца 201d. Управление гидравлическим давлением, подаваемым в регулируемую камеру 201o нагнетания гидравлического давления, обеспечивает возможность кулачковому кольцу 201d ходить против силы смещения пружины 201g таким образом, чтобы изменять производительность масляной камеры 201k. Как результат, объем нагнетания MOP 201 переменной производительности может управляться. Гидравлическое давление в регулируемой камере 201o нагнетания гидравлического давления управляется посредством регулирования давления в магистрали через клапан 219 снижения давления и соленоидный клапан 222.
[0054] В устройстве гидравлического управления транспортного средства, имеющем такую конфигурацию, ECU 300 выполняет обработку гидравлического управления, описанную ниже. Как результат, MOP 201 переменной производительности управляется с достаточной скоростью отклика без использования измерительного устройства фактического гидравлического давления нагнетания. Ниже описывается работа ECU 300, выполняющего обработку гидравлического управления, со ссылкой на фиг. 4-7.
[0055] Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки гидравлического управления, которая является одним вариантом осуществления настоящего изобретения. Фиг. 5 является управляющей блок-схемой последовательности операций способа для описания последовательности операций обработки гидравлического управления, которая является одним вариантом осуществления настоящего изобретения. Фиг. 6 является схематичным видом для описания способа вычисления для целевого объемного расхода CVT 5. Фиг. 7 является схематичным видом для описания способа вычисления для целевого объема нагнетания MOP 201 переменной производительности.
[0056] Блок-схема последовательности операций способа, проиллюстрированная на фиг. 4, начинается в то время, когда переключатель зажигания транспортного средства Ve переключаются из включенного состояния в выключенное состояние. После этого обработка гидравлического управления переходит к этапу S1.
[0057] При обработке этапа S1, ECU 300 использует целевое давление PL в магистрали гидравлической схемы 200 (целевой входной крутящий момент CVT 5), частоту вращения входного вала 3 (частоту вращения входного вала), целевое передаточное отношение CVT 5 и температуру масла (температуру масла) в маслосборнике 204, чтобы вычислять, в качестве целевого объемного расхода T/M, сумму объемного расхода Qpl масла (объемного расхода системы управления муфты и направляющего ролика), требуемого для направляющего ролика 401 и муфты 402, объемного расхода Qsec масла, требуемого для T/C 403 (объемного расхода системы управления T/C), и объемного расхода Qlub масла (объемного расхода смазки), требуемого для охладителя 404 и требующей смазки области 405.
[0058] В частности, ECU 300 сохраняет карты TA, которые указывают соотношение между целевым давлением PL в магистрали, частотой вращения входного вала, целевым передаточным отношением, температурой масла и целевым объемным расходом T/M, полученными заранее посредством экспериментов или моделирования, как проиллюстрировано на фиг. 6. ECU 300 считывает целевой объемный расход T/M, соответствующий текущему целевому давлению PL в магистрали, частоте вращения входного вала, целевому передаточному отношению и температуре масла, из сохраненных карт TA. Соответственно, обработка этапа S1 завершается, и обработка гидравлического управления переходит к этапу S2.
[0059] Объемный расход Qpl системы управления муфты и направляющего ролика включает в себя, например, объем утечки масла (в зависимости от целевого давления PL в магистрали, частоты вращения входного вала и температуры масла) в клапанах и герметизирующих элементах, включенных в систему управления муфтой направляющего ролика. Объемный расход Qpl системы управления муфты и направляющего ролика также включает в себя объемный расход перемещающегося масла (в зависимости от целевого передаточного отношения) в шкивах, объемный расход масла, заполненного в пакете муфты (в зависимости от ступени зубчатой передачи в случае транспортных AT-средств), и объемного расхода масла приоритетной диафрагмы (в зависимости от температуры масла) из системы поддержания давления в магистрали в систему поддержания вторичного давления.
[0060] Объемный расход Qsec системы управления T/C включает в себя объем утечки масла (в зависимости от целевого давления PL в магистрали, частоты вращения входного вала и температуры масла) в клапанах и герметизирующих элементах, включенных в систему управления T/C, объемный расход масла, возвращаемого в систему управления T/C, объемный расход масла приоритетной диафрагмы (в зависимости от температуры масла) из системы поддержания вторичного давления в систему поддержания давления смазки. Объемный расход Qlub смазки включает в себя, например, объемный расход масла (в зависимости от температуры масла), который протекает в требующую смазки часть, и объемный расход масла на сливе (в зависимости от температуры масла), к примеру, в сетчатом фильтре на стороне давления.
[0061] При обработке этапа S2, ECU 300 использует целевой объемный расход T/M, вычисленный при обработке этапа S1, чтобы вычислять целевой объемный расход нагнетания и целевое гидравлическое давление нагнетания MOP 201 переменной производительности и EOP 202 (обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания). Ниже описываются подробности обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания со ссылкой на фиг. 8 и 9. Соответственно, обработка этапа S2 завершается, и обработка гидравлического управления переходит к этапу S3.
[0062] При обработке этапа S3, ECU 300 использует целевой объемный расход нагнетания MOP 201 переменной производительности, вычисленный при обработке этапа S2, целевое давление PL в магистрали гидравлической схемы 200 и частоту Nmop вращения (частоту вращения MOP-вала) MOP 201 переменной производительности, чтобы вычислять целевой объем Vmop_tgt нагнетания (объем масла, нагнетаемый из одной масляной камеры в расчете на один оборот (cc/rev)) MOP 201 переменной производительности. ECU 300 вычисляет частоту Nmop вращения MOP-вала с использованием частоты вращения входного вала. В частности, ECU 300 сохраняет карты TB, которые указывают соотношение между целевым объемным расходом нагнетания и целевым давлением PL в магистрали MOP 201 переменной производительности, частотой Nmop вращения MOP-вала и целевым объемом нагнетания MOP 201 переменной производительности, полученными заранее посредством экспериментов или моделирования, как проиллюстрировано на фиг. 7. ECU 300 затем считывает целевой объем нагнетания MOP 201 переменной производительности, соответствующий целевому объемному расходу нагнетания, целевому давлению PL в магистрали и частоте Nmop вращения MOP-вала, из сохраненных карт TB.
[0063] В этом случае, как проиллюстрировано на фиг. 5, ECU 300 предпочтительно вычисляет целевой объем Vmop_tgt_base нагнетания посредством использования объемного расхода Qmop_tgt, полученного посредством суммирования объема Q_sol утечки масла в соленоидном клапане 222, соответствующего управляющему давлению (управляющему давлению Pact в соленоиде для регулируемого управления) соленоидного клапана 222, с целевым объемным расходом Qmop_base нагнетания (целевым объемным расходом, используемым в качестве основы), вычисленным при обработке этапа S2. ECU 300 предпочтительно вычисляет конечный целевой объем Vmop_tgt нагнетания посредством задания верхнего и нижнего предельных значений (верхнего и нижнего предельных защитных значений целевого объема нагнетания) таким образом, что вычисленный целевой объем Vmop_tgt_base нагнетания может попадать в указанный диапазон регулирования. Соответственно, обработка этапа S3 завершается, и обработка гидравлического управления переходит к этапу S4.
[0064] При обработке этапа S4, ECU 300 вычисляет целевую величину Xstr_tgt хода кулачкового кольца 201d MOP 201 переменной производительности на основе целевого объема Vmop_tgt нагнетания MOP 201 переменной производительности, вычисленной при обработке этапа S3. Соответственно, обработка этапа S4 завершается, и обработка гидравлического управления переходит к этапу S5.
[0065] При обработке этапа S5, ECU 300 вычисляет целевое управляющее гидравлическое давление Pact_tgt (целевое управляющее давление в соленоиде для регулируемого управления) соленоидного клапана 222 на основе целевой величины Xstr_tgt хода, вычисленной при обработке этапа S4. Соответственно, обработка этапа S5 завершается, и обработка гидравлического управления переходит к этапу S6.
[0066] При обработке этапа S6, ECU 300 вычисляет целевую частоту вращения электромотора 215 на основе целевого объемного расхода нагнетания EOP 202, вычисленного при обработке этапа S2. Соответственно, обработка этапа S6 завершается, и обработка гидравлического управления переходит к этапу S7.
[0067] При обработке этапа S7, ECU 300 управляет соленоидным клапаном 222 и EOP 202 на основе целевого управляющего давления Pact_tgt в соленоиде для регулируемого управления и целевой частоты вращения электромотора 215, вычисленных при обработке этапов S5 и S6. В частности, как проиллюстрировано на фиг. 5, ECU 300 вычисляет целевой управляющий ток Iact_tgt соленоидного клапана 222 на основе целевого управляющего давления Pact_tgt в соленоиде для регулируемого управления и приводит в действие схему 406 приведения в действие, с тем чтобы прикладывать вычисленный целевой управляющий ток Iact_tgt к соленоидному клапану 222.
[0068] Соответственно, электрический ток Iact (выходной ток соленоида) прикладывается к соленоидному клапану 222, и управляющее давление соленоидного клапана 222 управляется таким образом, что оно представляет собой управляющее давление Pact в соленоиде для регулируемого управления. Как результат, кулачковое кольцо 201d выполняет ход, соответствующий величине Xstr хода (ходу кулачкового кольца), объем нагнетания MOP 201 переменной производительности управляется таким образом, что он представляет собой объем Vmop нагнетания, соответствующий целевому объему нагнетания, и масло объемного расхода Qmop нагнетания нагнетается. Что касается EOP 202, когда электромотор 215 приводит в действие EOP 202 на целевой частоте вращения, объемный расход нагнетания EOP 202 управляется таким образом, что он представляет собой целевой объемный расход нагнетания. Соответственно, обработка этапа S7 завершается, и последовательности этапов обработки гидравлического управления завершаются. После этой точки, обработка гидравлического управления многократно выполняется каждый раз, когда предварительно определенное время истекает после того, как обработка гидравлического управления завершается.
[0069] Далее, со ссылкой на фиг. 8 и 9, подробно описывается обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этапе S2.
[0070] Сначала описывается последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является первым вариантом осуществления настоящего изобретения, в качестве первого варианта осуществления со ссылкой на фиг. 8.
[0071] Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является первым вариантом осуществления настоящего изобретения. Блок-схема последовательности операций способа, проиллюстрированная на фиг. 8, начинается в то время, когда обработка этапа S1, проиллюстрированная на фиг. 4, завершается. После этого обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S21.
[0072] При обработке этапа S21, ECU 300 определяет то, равна или меньше либо нет сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C объемного расхода Qmop_max нагнетания во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C равна или меньше объемного расхода Qmop_max нагнетания (этап S21: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S22. Когда сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C превышает объемный расход Qmop_max нагнетания (этап S21: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S29.
[0073] При обработке этапа S22, ECU 300 задает целевой объемный расход Qmop нагнетания MOP 201 переменной производительности равным сумме объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C. Как следствие, обработка этапа S22 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапам S23 и S26.
[0074] При обработке этапа S23, ECU 300 определяет то, равен или выше либо нет объемный расход Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности объемного расхода Qpl системы управления муфты и направляющего ролика. В качестве результата определения, когда объемный расход Qmop_main_max нагнетания равен или выше объемного расхода Qpl системы управления муфты и направляющего ролика (этап S23: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S24. Когда объемный расход Qmop_main_max нагнетания меньше объемного расхода Qpl системы управления муфты и направляющего ролика (этап S23: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S25.
[0075] При обработке этапа S24, ECU 300 задает гидравлическое давление Pmop_main нагнетания основного порта Po1 MOP 201 переменной производительности равным целевому давлению PL в магистрали и задает гидравлическое давление Pmop_sub нагнетания субпорта Po2 равным вторичному давлению Psec. Как следствие, обработка этапа S24 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0076] При обработке этапа S25, ECU 300 задает гидравлические давления Pmop_main и Pmop_sub нагнетания основного порта Po1 и субпорта Po2 MOP 201 переменной производительности равными целевому давлению PL в магистрали. Как следствие, обработка этапа S25 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0077] При обработке этапа S26, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания EOP 202 во время максимального вращения объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше объемного расхода Qlub смазки (этап S26: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S27. Когда объемный расход Qeop_max нагнетания меньше объемного расхода Qlub смазки (этап S26: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S28.
[0078] При обработке этапа S27, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S27 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0079] При обработке этапа S28, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S28 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0080] При обработке этапа S29, ECU 300 определяет то, равен или меньше либо нет объемный расход Qpl системы управления муфты и направляющего ролика объемного расхода Qmop_max нагнетания во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qpl системы управления муфты и направляющего ролика равен или меньше объемного расхода Qmop_max нагнетания (этап S29: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S30. Между тем, когда объемный расход Qpl системы управления муфты и направляющего ролика превышает объемный расход Qmop_max нагнетания (этап S29: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S37.
[0081] При обработке этапа S30, ECU 300 задает целевой объемный расход Qmop нагнетания MOP 201 переменной производительности равным объемному расходу Qmop_max нагнетания во время максимального объема нагнетания, так что объемный расход Qpl системы управления муфты и направляющего ролика и объемный расход Qsec1, который является частью объемного расхода Qsec системы управления T/C, подаются из MOP 201 переменной производительности. Как следствие, обработка этапа S30 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапам S31 и S34.
[0082] При обработке этапа S31, ECU 300 определяет то, равен или выше либо нет объемный расход Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности объемного расхода Qpl системы управления муфты и направляющего ролика. В качестве результата определения, когда объемный расход Qmop_main_max нагнетания равен или выше объемного расхода Qpl системы управления муфты и направляющего ролика (этап S31: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S32. Когда объемный расход Qmop_main_max нагнетания меньше объемного расхода Qpl системы управления муфты и направляющего ролика (этап S31: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S33.
[0083] При обработке этапа S32, ECU 300 задает гидравлическое давление Pmop_main нагнетания основного порта Po1 MOP 201 переменной производительности равным целевому давлению PL в магистрали и задает гидравлическое давление Pmop_sub нагнетания субпорта Po2 равным вторичному давлению Psec. Как следствие, обработка этапа S32 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0084] При обработке этапа S33, ECU 300 задает гидравлическое давление Pmop_main, Pmop_sub нагнетания основного порта Po1 и субпорта Po2 MOP 201 переменной производительности равным целевому давлению PL в магистрали. Как следствие, обработка этапа S33 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0085] При обработке этапа S34, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания во время максимального вращения EOP 202 суммы остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C, который не может подаваться из MOP 201 переменной производительности, и объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше суммы остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S34: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S35. Когда объемный расход Qeop_max нагнетания меньше суммы остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S34: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S36.
[0086] При обработке этапа S35, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным сумме остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S35 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0087] При обработке этапа S36, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S36 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0088] При обработке этапа S37, ECU 300 задает целевой объемный расход Qmop нагнетания MOP 201 переменной производительности равным объемному расходу Qmop_max нагнетания во время максимального объема нагнетания и задает целевое гидравлическое давление Pmop нагнетания MOP 201 переменной производительности равным целевому давлению PL в магистрали, так что объемный расход Qpl1, который является частью объемного расхода Qpl системы управления муфты и направляющего ролика, подается из MOP 201 переменной производительности. Как следствие, обработка этапа S37 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S38.
[0089] При обработке этапа S38, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания EOP 202 во время максимального вращения суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, который не может подаваться из MOP 201 переменной производительности, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S38: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S39. Когда объемный расход Qeop_max нагнетания меньше суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S38: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S40.
[0090] При обработке этапа S39, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным сумме остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным целевому давлению PL в магистрали. Как следствие, обработка этапа S39 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0091] При обработке этапа S40 ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным целевому давлению PL в магистрали. Как следствие, обработка этапа S40 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0092] Второй вариант осуществления
Ниже описывается последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является вторым вариантом осуществления настоящего изобретения, со ссылкой на фиг. 9.
[0093] Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания, которая является вторым вариантом осуществления настоящего изобретения. Блок-схема последовательности операций способа, проиллюстрированная на фиг. 9, начинается в то время, когда обработка этапа S1, проиллюстрированная на фиг. 4, завершается. После этого обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S51.
[0094] При обработке этапа S51, ECU 300 определяет то, равна или меньше либо нет сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C объемного расхода Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C равна или меньше объемного расхода Qmop_main_max нагнетания (этап S51: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S52. Когда сумма объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C превышает объемный расход Qmop_main_max нагнетания (этап S51: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S59.
[0095] При обработке этапа S52, ECU 300 задает целевой объемный расход Qmop_mainнагнетания MOP 201 переменной производительности равным сумме объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec системы управления T/C. ECU 300 также задает гидравлическое давление Pmop_main нагнетания основного порта Po1 MOP 201 переменной производительности равным целевому давлению PL в магистрали. Как следствие, обработка этапа S52 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S53.
[0096] При обработке этапа S53, ECU 300 определяет то, равен или меньше либо нет объемный расход Qlub смазки объемного расхода Qmop_sub_max нагнетания субпорта Po2 во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qlub смазки равен или меньше объемного расхода Qmop_sub_max нагнетания (этап S53: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S54. Между тем, когда объемный расход Qlub смазки превышает объемный расход Qmop_sub_max нагнетания (этап S53: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S55.
[0097] При обработке этапа S54, ECU 300 задает в качестве целевого объемного расхода Qmop_subнагнетания субпорта Po2 MOP 201 переменной производительности значение, полученное посредством умножения целевого объемного расхода Qmop_mainнагнетания основного порта Po1 MOP 201 переменной производительности на соотношение (1-a)/a портов (основной порт: субпорт=a:1-a). ECU 300 задает целевое гидравлическое давление Pmop_sub нагнетания субпорта Po2 MOP 201 переменной производительности равным давлению Plub смазки. ECU 300 дополнительно задает как целевой объемный расход Qeop нагнетания, так и целевое гидравлическое давление Peop нагнетания EOP 202 равными нулю. Как следствие, обработка этапа S54 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0098] При обработке этапа S55, ECU 300 задает в качестве целевого объемного расхода Qmop_subнагнетания субпорта Po2 MOP 201 переменной производительности значение, полученное посредством умножения целевого объемного расхода Qmop_mainнагнетания основного порта Po1 MOP 201 переменной производительности на соотношение (1-a)/a портов, так что объемный расход Qlub1, который является частью объемного расхода Qlub смазки, подается из субпорта Po2 MOP 201 переменной производительности. ECU 300 также задает целевое гидравлическое давление Pmop_sub нагнетания субпорта Po2 MOP 201 переменной производительности равным давлению Plub смазки. Как следствие, обработка этапа S55 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S56.
[0099] При обработке этапа S56, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания во время максимального вращения EOP 202 остатка (Qlub-Qlub1) объемного расхода Qlub смазки, который не может подаваться из субпорта Po2 MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше остатка (Qlub-Qlub1) объемного расхода Qlub смазки (этап S56: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S57. Когда объемный расход Qeop_max нагнетания меньше остатка (Qlub-Qlub1) объемного расхода Qlub смазки (этап S56: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S58.
[0100] При обработке этапа S57, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 в остаток (Qlub-Qlub1) объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S57 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0101] При обработке этапа S58, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S58 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0102] При обработке этапа S59, ECU 300 определяет то, равен или меньше либо нет объемный расход Qpl системы управления муфты и направляющего ролика объемного расхода Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qpl системы управления муфты и направляющего ролика равен или меньше объемного расхода Qmop_main_max нагнетания (этап S59: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S60. Между тем, когда объемный расход Qpl системы управления муфты и направляющего ролика превышает объемный расход Qmop_main_max нагнетания (этап S59: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S70.
[0103] При обработке этапа S60, ECU 300 задает целевой объемный расход Qmop_mainнагнетания основного порта Po1 MOP 201 переменной производительности равным объемному расходу Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания, так что объемный расход Qpl системы управления муфты и направляющего ролика и объемный расход Qsec1, который является частью объемного расхода Qsec системы управления T/C, подаются из основного порта Po1 MOP 201 переменной производительности. ECU 300 также задает гидравлическое давление Pmop_main нагнетания основного порта Po1 MOP 201 переменной производительности равным целевому давлению PL в магистрали. Как следствие, обработка этапа S60 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S61.
[0104] При обработке этапа S61, ECU 300 определяет то, равен или меньше либо нет остаток (Qsec-Qsec1) объемного расхода Qsec системы управления T/C, который не может подаваться из основного порта Po1 MOP 201 переменной производительности, объемного расхода Qmop_sub_max нагнетания субпорта Po2 во время максимального объема нагнетания MOP 201 переменной производительности. Когда остаток (Qsec-Qsec1) равен или меньше объемного расхода Qmop_sub_max нагнетания в качестве результата определения (этап S61: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S62. Между тем, когда остаток (Qsec-Qsec1) превышает объемный расход Qmop_sub_max нагнетания (этап S61: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S66.
[0105] При обработке этапа S62, ECU 300 задает в качестве целевого объемного расхода Qmop_subнагнетания субпорта Po2 MOP 201 переменной производительности значение, полученное посредством умножения объемного расхода Qmop_main_max нагнетания основного порта Po1 в максимальном объеме нагнетания MOP 201 переменной производительности на соотношение (1-a)/a портов, так что остаток (Qsec-Qsec1) объемного расхода Qsec системы управления T/C и объемного расхода Qlub1, который является частью объемного расхода Qlub смазки, подается из субпорта Po2 MOP 201 переменной производительности. ECU 300 также задает целевое гидравлическое давление Pmop_sub нагнетания субпорта Po2 MOP 201 переменной производительности равным вторичному давлению Psec. Как следствие, обработка этапа S62 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S63.
[0106] При обработке этапа S63, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания во время максимального вращения EOP 202 остатка (Qlub-Qlub1) объемного расхода Qlub смазки, который не может подаваться из субпорта Po2 MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше остатка (Qlub-Qlub1) объемного расхода Qlub смазки (этап S63: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S64. Когда объемный расход Qeop_max нагнетания меньше остатка (Qlub-Qlub1) объемного расхода Qlub смазки (этапа S63: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S65.
[0107] При обработке этапа S64, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 в остаток (Qlub-Qlub1) объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S64 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0108] При обработке этапа S65, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным давлению Plub смазки. Как следствие, обработка этапа S65 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0109] При обработке этапа S66, ECU 300 задает в качестве целевого объемного расхода Qmop_subнагнетания субпорта Po2 MOP 201 переменной производительности значение, полученное посредством умножения объемного расхода Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности на соотношение (1-a)/a портов, так что объемный расход (Qsec-Qsec1)-Qsec2, полученный посредством вычитания объемного расхода Qsec2 из остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C, подается из субпорта Po2 MOP 201 переменной производительности. ECU 300 также задает целевое гидравлическое давление Pmop_sub нагнетания субпорта Po2 MOP 201 переменной производительности равным вторичному давлению Psec. Как следствие, обработка этапа S66 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S67.
[0110] При обработке этапа S67, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания EOP 202 во время максимального вращения суммы объемного расхода Qsec2 и объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше суммы объемного расхода Qsec2 и объемного расхода Qlub смазки (этап S67: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S68. Когда объемный расход Qeop_max нагнетания меньше суммы объемного расхода Qsec2 и объемного расхода Qlub смазки (этап S67: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S69.
[0111] При обработке этапа S68, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным сумме объемного расхода Qsec2 и объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S68 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0112] При обработке этапа S69, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S69 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0113] При обработке этапа S70, ECU 300 определяет то, равен или меньше либо нет объемный расход Qpl системы управления муфты и направляющего ролика объемного расхода Qmop_max нагнетания во время максимального объема нагнетания MOP 201 переменной производительности. В качестве результата определения, когда объемный расход Qpl системы управления муфты и направляющего ролика равен или меньше объемного расхода Qmop_max нагнетания (этап S70: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S71. Между тем, когда объемный расход Qpl системы управления муфты и направляющего ролика превышает объемный расход Qmop_max нагнетания (этап S70: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S75.
[0114] При обработке этапа S71, ECU 300 задает целевой объемный расход Qmop_mainнагнетания основного порта Po1 MOP 201 переменной производительности равным объемному расходу Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности, так что объемный расход Qpl1, который является частью объемного расхода Qpl системы управления муфты и направляющего ролика, подается из основного порта Po1 MOP 201 переменной производительности. ECU 300 также задает целевое гидравлическое давление Pmop_main нагнетания основного порта Po1 MOP 201 переменной производительности равным целевому давлению PL в магистрали. ECU 300 дополнительно задает целевой объемный расход Qmop_subнагнетания субпорта Po2 MOP 201 переменной производительности равным значению, полученному посредством умножения объемного расхода Qmop_main_max нагнетания основного порта Po1 во время максимального объема нагнетания MOP 201 переменной производительности на соотношение (1-a)/a портов, так что сумма остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика и объемного расхода Qsec1, который является частью объемного расхода Qsec системы управления T/C, подается из субпорта Po2 MOP 201 переменной производительности. ECU 300 также задает целевое гидравлическое давление Pmop_sub нагнетания субпорта Po2 MOP 201 переменной производительности равным целевому давлению PL в магистрали. Как следствие, обработка этапа S71 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S72.
[0115] При обработке этапа S72, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания во время максимального вращения EOP 202 суммы остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C, который не может подаваться из субпорта Po2 MOP 201 переменной производительности, и объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше суммы остатка (Qsec-Qsec1) и объемного расхода Qlub смазки (этап S72: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S73. Когда объемный расход Qeop_max нагнетания меньше суммы остатка (Qsec-Qsec1) и объемного расхода Qlub смазки (этап S72: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S74.
[0116] При обработке этапа S73, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным сумме остатка (Qsec-Qsec1) объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S73 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0117] При обработке этапа S74, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения EOP 202 и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным вторичному давлению Psec. Как следствие, обработка этапа S74 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0118] При обработке этапа S75, ECU 300 задает целевой объемный расход Qmop нагнетания MOP 201 переменной производительности равным объемному расходу Qmop_max нагнетания во время максимального объема нагнетания и задает целевое гидравлическое давление Pmop нагнетания MOP 201 переменной производительности равным целевому давлению PL в магистрали, так что объемный расход Qpl1, который является частью объемного расхода Qpl системы управления муфты и направляющего ролика, подается из MOP 201 переменной производительности. Как следствие, обработка этапа S75 завершается, и обработка вычисления объемного расхода нагнетания и гидравлического давления нагнетания переходит к этапу S76.
[0119] При обработке этапа S76, ECU 300 определяет то, равен или выше либо нет объемный расход Qeop_max нагнетания EOP 202 во время максимального вращения суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, который не может подаваться из MOP 201 переменной производительности, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки. В качестве результата определения, когда объемный расход Qeop_max нагнетания равен или выше суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S76: "Да"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S77. Когда объемный расход Qeop_max нагнетания меньше суммы остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки (этап S76: "Нет"), ECU 300 переводит обработку вычисления объемного расхода нагнетания и гидравлического давления нагнетания на этап S78.
[0120] При обработке этапа S77, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным сумме остатка (Qpl-Qpl1) объемного расхода Qpl системы управления муфты и направляющего ролика, объемного расхода Qsec системы управления T/C и объемного расхода Qlub смазки и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным целевому давлению PL в магистрали. Как следствие, обработка этапа S77 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0121] При обработке этапа S78, ECU 300 задает целевой объемный расход Qeop нагнетания EOP 202 равным объемному расходу Qeop_max нагнетания во время максимального вращения EOP 202 и задает целевое гидравлическое давление Peop нагнетания EOP 202 равным целевому давлению PL в магистрали. Как следствие, обработка этапа S78 завершается, и последовательности этапов обработки вычисления объемного расхода нагнетания и гидравлического давления нагнетания завершаются.
[0122] Как очевидно из вышеприведенного описания, в устройстве гидравлического управления транспортного средства в качестве одного варианта осуществления настоящего изобретения, ECU 300 вычисляет целевой объем нагнетания MOP 201 переменной производительности с использованием целевого давления в магистрали гидравлической схемы 200, целевого объемного расхода нагнетания MOP 201 переменной производительности и частоты вращения MOP-вала, вычисленной из частоты вращения входного вала, и управляет MOP 201 переменной производительности на основе вычисленного целевого объема нагнетания. Соответственно, MOP 201 переменной производительности может управляться с достаточной скоростью отклика без использования измерительного устройства для фактического гидравлического давления нагнетания.
[0123] В первой модификации, когда целевой объем нагнетания MOP 201 переменной производительности вычисляется, предпочтительно задавать целевой объем нагнетания MOP 201 переменной производительности большим по мере того, как объемная эффективность MOP 201 переменной производительности становится более низкой. В частности, объем утечки масла из MOP 201 переменной производительности меняется в зависимости от частоты вращения MOP-вала, гидравлического давления нагнетания и температуры масла. По мере того, как объем утечки масла возрастает, фактическое гидравлическое давление нагнетания MOP 201 переменной производительности опускается ниже целевого гидравлического давления нагнетания. Соответственно, как проиллюстрировано на фиг. 10, во время вычисления целевого объема нагнетания MOP 201 переменной производительности, ECU 300 считывает объемную эффективность, соответствующую целевому давлению в магистрали, частоте вращения MOP-вала и объему нагнетания, из карт, указывающих соотношение между целевым давлением в магистрали, частотой вращения MOP-вала и объемной эффективностью MOP 201 переменной производительности для каждого объема нагнетания MOP 201 переменной производительности. Предпочтительно, если ECU 300 вычисляет целевой объемный расход MOP 201 переменной производительности посредством суммирования с целевым объемным расходом для объемного расхода, соответствующего объемной эффективности считывания, и вычисляет целевой объем нагнетания MOP 201 переменной производительности с использованием вычисленного целевого объемного расхода.
[0124] Соответственно, целевой объем нагнетания MOP 201 переменной производительности задается большим по мере того, как объемная эффективность становится более низкой. Как результат, даже в случае, если объем утечки масла из MOP 201 переменной производительности увеличивается, MOP 201 переменной производительности может управляться с достаточной скоростью отклика по сравнению со случаем измерения фактического гидравлического давления нагнетания и выполнения управления с обратной связью. Поскольку объемная эффективность варьируется в соответствии с объемом нагнетания MOP 201 переменной производительности, вычисление сходимости необходимо, когда вычисляется объемная эффективность. Когда вычисление сходимости является трудным, объемная эффективность может вычисляться с использованием карт, указывающих соотношение между целевым объемным расходом нагнетания и целевым гидравлическим давлением нагнетания MOP 201 переменной производительности, частотой вращения MOP-вала и объемной эффективностью. Когда MOP 201 переменной производительности имеет двухпортовый тип, предпочтительно учитывать варьирование объемной эффективности, вызываемое посредством давления на выходе субпорта.
[0125] Во второй модификации, когда EOP 202 приводится в действие в рабочей точке, более достаточной по сравнению с текущей рабочей точкой, и величина уменьшения расхода топлива двигателя 1, вызываемая посредством уменьшения объемного расхода нагнетания MOP 201 переменной производительности, превышает расход топлива, соответствующий приращению величины электрической мощности приведения в действие EOP 202, предпочтительно, если ECU 300 приводит в действие EOP 202 в рабочей точке, более эффективной по сравнению с текущей рабочей точкой, и выполняет обработку управления объемным расходом нагнетания, чтобы уменьшать объемный расход нагнетания MOP 201 переменной производительности. Ниже подробно описывается обработка управления объемным расходом нагнетания со ссылкой на фиг. 11 и 12.
[0126] Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки управления объемным расходом нагнетания, которая является одним вариантом осуществления настоящего изобретения. Фиг. 12 является пояснительным видом, иллюстрирующим обработку управления объемным расходом нагнетания, которая является одним вариантом осуществления настоящего изобретения. Блок-схема последовательности операций способа, проиллюстрированная на фиг. 11, начинается в то время, когда переключатель зажигания транспортного средства Ve переключается из выключенного состояния во включенное состояние. После этого обработка управления объемным расходом нагнетания переходит к этапу S81.
[0127] При обработке этапа S81, ECU 300 сравнивает соотношение размеров между объемным расходом Qeop_0 нагнетания EOP 202 в текущей рабочей точке и объемным расходом Qeop_peak нагнетания EOP 202 в рабочей точке, в которой общая эффективность является наибольшей. В результате сравнения, когда объемный расход Qeop_0 нагнетания меньше объемного расхода Qeop_peak нагнетания (этап S81: "Да"), ECU 300 переводит обработку управления объемным расходом нагнетания на этап S82. В частности, как проиллюстрировано на верхнем графике по фиг. 12, ECU 300 переводит обработку управления объемным расходом нагнетания на этап S82, когда объемный расход Qeop_0 нагнетания EOP 202 в текущей рабочей точке P1 меньше объемного расхода Qeop_peak нагнетания EOP 202 в рабочей точке P2, в которой общая эффективность EOP 202 является наибольшей. На верхнем графике по фиг. 12, кривая L1 является кривой, иллюстрирующей соотношение между общей эффективностью и объемным расходом нагнетания EOP 202. Когда объемный расход Qeop_0 нагнетания равен или выше объемного расхода Qeop_peak нагнетания (этапа S81: "Нет"), ECU 300 переводит обработку управления объемным расходом нагнетания в S86.
[0128] При обработке этапа S82, как проиллюстрировано на нижнем графике по фиг. 12, ECU 300 вычисляет приращение ΔMeop расхода топлива, сформированное посредством увеличения (величины ΔPeop увеличения) в величине электрической мощности приведения в действие EOP 202, вызываемого посредством перемещения рабочей точки EOP 202 из текущей рабочей точки P3 в рабочую точку P4, в которой общая эффективность является наибольшей. На нижнем графике по фиг. 12, кривая L2 является кривой, иллюстрирующей соотношение между величиной электрической мощности приведения в действие и объемным расходом нагнетания EOP 202. Соответственно, обработка управления этапа S82 завершается, и обработка для объемного расхода нагнетания переходит к этапу S83.
[0129] При обработке этапа S83, ECU 300 вычисляет постепенное уменьшение ΔMmop расхода топлива вследствие повышенной эффективности передачи MOP 201 переменной производительности, вызываемой посредством увеличения объемного расхода нагнетания EOP 202. Соответственно, обработка управления этапа S83 завершается, и обработка управления объемным расходом нагнетания переходит к этапу S84.
[0130] При обработке этапа S84, ECU 300 определяет то, меньше или нет приращение ΔMeop расхода топлива, вычисленное при обработке этапа S82, постепенного уменьшения ΔMmop расхода топлива, вычисленного при обработке этапа S83. В качестве результата определения, когда приращение ΔMeop расхода топлива меньше постепенного уменьшения ΔMmop расхода топлива (этап S84: "Да"), ECU 300 переводит обработку управления объемным расходом нагнетания на этап S85. Когда приращение ΔMeop расхода топлива равно или выше постепенного уменьшения ΔMmop расхода топлива (этапа S84: "Нет"), ECU 300 переводит обработку управления объемным расходом нагнетания на этап S86.
[0131] При обработке этапа S85, ECU 300 задает объемный расход нагнетания EOP 202 равным объемному расходу нагнетания в рабочей точке, в которой общая эффективность является наибольшей. ECU 300 также задает значение, полученное посредством вычитания объемного расхода нагнетания EOP 202 из требуемого объемного расхода T/M, в качестве объемного расхода нагнетания MOP 201 переменной производительности. Соответственно, обработка управления этапа S85 завершается, и последовательности этапов обработки управления объемным расходом нагнетания завершаются. После этой точки, ECU 300 многократно выполняет обработку управления объемным расходом нагнетания каждый раз, когда предварительно определенное время истекает после того, как обработка управления объемным расходом нагнетания завершается.
[0132] При обработке этапа S86, ECU 300 задает значение, полученное посредством деления объемного расхода масла, требуемого для системы поддержания давления в магистрали в гидравлической схеме 200, на соотношение основных портов MOP 201 переменной производительности, в качестве объемного расхода нагнетания MOP 201 переменной производительности. ECU 300 также задает значение, полученное посредством вычитания объемного расхода нагнетания MOP 201 переменной производительности из требуемого объемного расхода T/M, в качестве объемного расхода нагнетания EOP 202. Соответственно, обработка управления этапа S86 завершается, и последовательности этапов обработки управления объемным расходом нагнетания завершаются. После этой точки, ECU 300 многократно выполняет обработку управления объемным расходом нагнетания каждый раз, когда предварительно определенное время истекает после того, как обработка управления объемным расходом нагнетания завершается.
[0133] Далее приводится описание преимущества обработки управления объемным расходом нагнетания со ссылкой на фиг. 13 и 14. Фиг. 13 иллюстрирует один пример временного изменения требуемого объемного расхода для системы поддержания давления в магистрали и требуемого объемного расхода для системы поддержания давления смазки по сравнению с временным изменением частоты вращения двигателя. Фиг. 14 иллюстрирует величины потока нагнетания MOP 201 переменной производительности и EOP 202 при обработке управления объемным расходом нагнетания в традиционном примере и в настоящем изобретении.
[0134] Рассмотрим случай, в котором требуемые величины расхода для системы поддержания давления в магистрали и системы поддержания давления смазки изменяются в соответствии с изменением частоты вращения двигателя, как проиллюстрировано на верхнем и нижнем графиках по фиг. 13. На верхнем и нижнем графиках по фиг. 13, линия L3 представляет частоту вращения двигателя, линия L4 представляет требуемый объемный расход для системы поддержания давления в магистрали, и линия L5 представляет требуемый объемный расход для системы поддержания давления смазки. В этом случае, при традиционной обработке управления объемным расходом нагнетания во время t, проиллюстрированной на фиг. 13, MOP 201 переменной производительности (основной порт и субпорт) используется для того, чтобы подавать требуемый объемный расход QLine для системы поддержания давления в магистрали и часть требуемого объемного расхода QLub для системы поддержания давления смазки, тогда как EOP 202 используется для того, чтобы подавать часть требуемого объемного расхода для системы поддержания давления смазки, которая не подается в достаточной степени, из MOP 201 переменной производительности, как проиллюстрировано на фиг. 14. Таким образом, EOP 202 нагнетает объем масла, не подаваемый в достаточной степени, из MOP 201 переменной производительности. Соответственно, MOP 201 переменной производительности работает в области низкого объемного расхода нагнетания и низкой эффективности.
[0135] Наоборот, при обработке управления объемным расходом нагнетания, которая является одним вариантом осуществления настоящего изобретения, когда приращение ΔMeop расхода топлива, которое формируется посредством увеличения величины электрической мощности приведения в действие EOP 202, вызываемого посредством перемещения рабочей точки EOP 202 из текущей рабочей точки P3 в рабочую точку P4, в которой общая эффективность является наибольшей, меньше постепенного уменьшения ΔMmop расхода топлива вследствие повышения эффективности трансмиссии MOP 201 переменной производительности посредством увеличения объемного расхода нагнетания EOP 202, ECU 300 увеличивает объемный расход нагнетания EOP 202 таким образом, что требуемый объемный расход QLub для системы поддержания давления смазки подается только из EOP 202, как проиллюстрировано на фиг. 14. Соответственно, объемный расход нагнетания MOP 201 переменной производительности может снижаться пропорционально увеличению объемного расхода нагнетания EOP 202, что позволяет повышать эффективность использования топлива.
[0136] В третьей модификации, ECU 300 предпочтительно выполняет обработку управления объемом нагнетания для задания целевого объема нагнетания MOP 201 переменной производительности равным максимальному объему нагнетания, когда подача топлива в двигатель прекращается 1. Ниже подробно описывается обработка управления объемом нагнетания со ссылкой на фиг. 15.
[0137] Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций обработки управления объемом нагнетания, которая является одним вариантом осуществления настоящего изобретения. Блок-схема последовательности операций способа, проиллюстрированная на фиг. 15, начинается в то время, когда переключатель зажигания транспортного средства Ve переключается из выключенного состояния во включенное состояние. После этого обработка управления объемом нагнетания переходит к этапу S91.
[0138] При обработке этапа S91, ECU 300 определяет то, выполняется или нет обработка отсечки топлива (FC), которая прекращает подачу топлива в двигатель 1. То, выполняется или нет FC-обработка, может определяться посредством определения состояния FC-флага, который указывает то, то, выполняется или нет FC-обработка. В качестве результата определения, когда FC-обработка работает (этап S91: "Да"), ECU 300 переводит обработку управления объемом нагнетания на этап S92. Когда FC-обработка не работает (этап S91: "Нет"), ECU 300 переводит обработку управления объемом нагнетания на этап S93.
[0139] При обработке этапа S92, ECU 300 задает целевой объем нагнетания MOP 201 переменной производительности равным максимальному объему нагнетания и задает целевой объемный расход EOP 202 равным значению, полученному посредством вычитания объемного расхода нагнетания MOP 201 переменной производительности из требуемого объемного расхода T/M. Соответственно, обработка управления этапа S92 завершается, и последовательности этапов обработки управления объемом нагнетания завершаются.
[0140] При обработке этапа S93, ECU 300 управляет целевым объемом нагнетания MOP 201 переменной производительности и EOP 202 в соответствии с целевым объемом нагнетания, полученным при обработке гидравлического управления, проиллюстрированной на фиг. 4. Соответственно, обработка управления этапа S93 завершается, и последовательности этапов обработки управления объемом нагнетания завершаются. После этой точки, ECU 300 многократно выполняет обработку управления объемом нагнетания каждый раз, когда предварительно определенное время истекает после того, как обработка управления объемом нагнетания завершается.
[0141] Далее приводится описание преимущества обработки управления объемом нагнетания со ссылкой на фиг. 16 и 17. Фиг. 16 иллюстрирует один пример временного изменения требуемого объемного расхода для системы поддержания давления в магистрали и требуемого объемного расхода для системы поддержания давления смазки по сравнению с временным изменением частоты вращения двигателя. Фиг. 17 иллюстрирует величины потока нагнетания MOP 201 переменной производительности и EOP 202 при обработке управления объемом нагнетания в традиционном примере и в настоящем изобретении.
[0142] Рассмотрим случай, в котором требуемые величины расхода для системы поддержания давления в магистрали и системы поддержания давления смазки изменяются в соответствии с изменением частоты вращения двигателя, как проиллюстрировано на фиг. 16. На фиг. 16, линия L6 представляет активацию и деактивацию FC-обработки, линия L7 представляет частоту вращения двигателя, линия L8 представляет требуемый объемный расход для системы поддержания давления в магистрали, и линия L9 представляет требуемый объемный расход для системы поддержания давления смазки. В этом случае, при традиционной обработке управления объемом нагнетания, во время t, когда FC-обработка активируется, MOP 201 переменной производительности (основной порт и субпорт) используется для того, чтобы подавать требуемый объемный расход QLine для системы поддержания давления в магистрали и часть требуемого объемного расхода QLub для системы поддержания давления смазки, тогда как EOP 202 используется для того, чтобы подавать часть требуемого объемного расхода для системы поддержания давления смазки, которая не подается в достаточной степени из MOP 201 переменной производительности, как проиллюстрировано на фиг. 17.
[0143] В отличие от этого, при обработке управления объемом нагнетания, которая является одним вариантом осуществления настоящего изобретения, во время t, когда FC-обработка активируется, ECU 300 задает целевой объем нагнетания MOP 201 переменной производительности равным максимальному объему нагнетания таким образом, чтобы увеличивать объемный расход нагнетания MOP 201 переменной производительности, как проиллюстрировано на фиг. 17. Как результат, объемный расход нагнетания EOP 202 может снижаться, чтобы уменьшать потребление электрической мощности EOP 202 в то время, когда FC-обработка выполняется. Это позволяет подавлять ухудшение эффективности использования топлива во время FC-обработки.
[0144] В этом варианте осуществления в качестве четвертой модификации, настоящее изобретение применяется к транспортному средству, включающему средству, включающему в себя бесступенчатую трансмиссию (CVT) в качестве трансмиссии. Тем не менее, без ограничения настоящим вариантом осуществления, настоящее изобретение является применимым к транспортному средству, включающему в себя автоматическую трансмиссию (AT) в качестве трансмиссии, как проиллюстрировано на фиг. 18. Тем не менее, при применении настоящего изобретения к транспортному средству, включающему в себя AT, целевой объемный расход T/M вычисляется посредством использования ступени зубчатой передачи в качестве параметра вместо целевого передаточного отношения. Ниже описывается конфигурация транспортного средства, включающего в себя AT, проиллюстрированную на фиг. 18. Составляющие элементы, аналогичные по конфигурации составляющим элементам транспортного средства Ve, проиллюстрированным в фиг. 1, обозначены посредством аналогичных ссылок с номерами, чтобы опускать их описание.
[0145] Фиг. 18 является схематичным видом, иллюстрирующим другой пример конфигурации транспортного средства, включающего устройство гидравлического управления транспортного средства, которое является одним вариантом осуществления настоящего изобретения. Как проиллюстрировано на фиг. 18, транспортное средство Ve в другом примере конфигурации включает автоматическую трансмиссию 30, которая может задаваться на множество ступеней переключения передач. Транспортное средство Ve также включает в себя множество зацепляющих устройств для переключения передач. Автоматическая трансмиссия 30 включает в себя однотипный первый планетарный зубчатый механизм 31, второй планетарный зубчатый механизм 32 Равиньо, имеющий четыре вращательных элемента, множество муфт C1, C2 и множество тормозов B1-B3. Каждая из муфт C1, C2 и тормозов B1-B3 представляет собой гидравлическое зацепляющее устройство, которое переводится во фрикционное зацепление посредством гидравлического актуатора. Гидравлический актуатор, который включен в систему муфт, принимает гидравлическое давление, подаваемое посредством гидравлической схемы 200 (не проиллюстрирована).
[0146] Когда муфты C1, C2 и тормоза B1-B3 переключаются между состоянием зацепления и состоянием расцепления, автоматическая трансмиссия 30 может устанавливать ступени зубчатой передачи, включающие в себя шесть ступеней зубчатой передачи переднего хода и ступень зубчатой передачи заднего хода. Например, когда любые два из двух муфт C1, C2 и трех тормозов B1-B3 зацепляются, многоступенчатая трансмиссия, имеющая шесть ступеней зубчатой передачи переднего хода, может достигаться. Первый планетарный зубчатый механизм 31 включает в себя солнечную шестерню, 31S вращающуюся как единое целое с входным валом 3, водило 31C, избирательно закрепленное посредством тормоза B1, и коронную шестерню 31R, избирательно закрепленную посредством тормоза B3.
[0147] Второй планетарный зубчатый механизм 32 включает в себя первую солнечную шестерню 32S1, вторую солнечную шестерню 32S2, коронную шестерню 32R, длинную сателлитную шестерню 32P1, короткую сателлитную шестерню 32P2 и водило 32C. Первая солнечная шестерня 32S1 вращается избирательно и как единое целое с солнечной шестерней 31S посредством муфты C1. Вторая солнечная шестерня 32S2 вращается как единое целое с водилом 31C. Коронная шестерня 32R вращается избирательно и как единое целое с солнечной шестерней 31S и входным валом 3 посредством первой муфты C1 и избирательно закрепляется посредством тормоза B2. Длинная сателлитная шестерня 32P1 сцепляется со второй солнечной шестерней 32S2, коронной шестерней 32R и короткой сателлитной шестерней 32P2. Водило 32C удержится с возможностью вращения и проворачивания каждую из дифференциальных сателлитных шестерней 32P1, 32P2, при одновременном вращении как единое целое с выходной шестерней.
[0148] Хотя выше описаны варианты осуществления, которые осуществляют изобретение, созданное авторами настоящего изобретения, настоящее изобретение не ограничено посредством описания и чертежей, которые составляют часть раскрытия сущности настоящего изобретения, созданного посредством настоящих вариантов осуществления. Таким образом, другие варианты осуществления, примеры, технологии операции и т.п., созданные специалистами в данной области техники на основе раскрытых вариантов осуществления, полностью охватываются объемом настоящего изобретения.
Реферат
Изобретение относится к гибридным транспортным средствам. Устройство для гидравлического управления масляным насосом транспортного средства содержит механический масляный насос переменной производительности, приводимый в действие посредством двигателя и выполненный с возможностью подавать гидравлическое давление в модуль привода транспортного средства и электронный модуль управления. Данный модуль вычисляет целевой объем нагнетания механического масляного насоса переменной производительности с использованием множества параметров трансмиссии. Множество параметров включают в себя целевой входной крутящий момент трансмиссии транспортного средства, целевой объемный расход нагнетания механического масляного насоса переменной производительности и частоту вращения входного вала транспортного средства. Затем модуль управляет механическим масляным насосом переменной производительности на основе целевого объема нагнетания. Повышается скорость отклика. 2 н. и 4 з.п. ф-лы, 18 ил.
Формула
Документы, цитированные в отчёте о поиске
Насосное устройство
Комментарии