Система для моделирования датчика - RU2417428C2
Код документа: RU2417428C2
Чертежи
Описание
Изобретение относится к моделирующей системе для моделирования работы датчика, предназначенного для преобразования физических параметров в электрические сигналы.
Такая моделирующая система особенно, хотя и не исключительно, пригодна для моделирования функционирования дифференциального преобразователя линейных перемещений (Linear Variable Differential Transformer - LVDT), преобразователя линейных перемещений (Linear Variable Transformer - LVT), дифференциального преобразователя вращательных перемещений (Rotary Variable Differential Transformer - RVDT), преобразователя вращательных перемещений (Rotary Variable Transformer - RVT) или кругового датчика положения (RESOLVER). Известно, что такие известные датчики используются для преобразования (линейных, угловых) перемещений и угловых скоростей в электрические сигналы. Такие датчики находят применение главным образом в авиации, более конкретно при выполнении функций определения выдвижения цилиндрического стержня, положения поверхности управления, перемещения и положения ползуна сервоклапана, числа оборотов двигателя и др. Интерес к данным датчикам основан на том, что положение и/или перемещение определяется посредством амплитудной модуляции. Данная технология обеспечивает, в частности, высокую стойкость к шумам и электромагнитным возмущениям. Более конкретно:
- датчиком LVDT является преобразователь, который изменяет напряжение пропорционально перемещению ферромагнитного сердечника. Данный датчик содержит основную катушку, возбуждаемую периодически изменяющимся сигналом возбуждения, и две вспомогательные катушки. Сердечник перемещается внутри данных катушек, направляет магнитный поток и генерирует напряжения в каждой вспомогательной катушке, амплитуды которых зависят от положения сердечника;
- датчик RVDT подобен датчику LVDT, но он использует вращающийся ферромагнитный сердечник;
- датчиками LVT и RVT являются датчики LVDT и RVDT соответственно, но оснащенные одной вспомогательной катушкой; и
- круговой датчик положения (RESOLVER) вместо ферромагнитного сердечника содержит элемент возбуждения, выполняющий функцию ротора, и две вспомогательные обмотки, расположенные под углом 90° таким образом, чтобы выполнять функцию статоров.
Такие различные датчики являются звеньями в системе сервоуправления, алгоритмы управления которой реализуются компьютером.
Настоящее изобретение относится к моделирующей системе, которая обеспечивает моделирование такого датчика и которая, в частности, может быть использована для проверки правильности вышеупомянутых алгоритмов управления, или для автоматизации процедур испытаний, или же для проверки граничных условий для конкретных применений, которые трудно воспроизвести при использовании реальных датчиков, таких как внесение шума и сдвига фазы или возможная комбинация информации.
С этой целью в соответствии с настоящим изобретением упомянутая моделирующая система для моделирования работы датчика, предназначенного для преобразования физических параметров, представленных в цифровой форме, в электрические сигналы, примечательна тем, что она содержит, по меньшей мере, один моделирующий узел, который содержит:
- генератор, который обеспечивает генерирование посредством прямого цифрового синтеза частоты цифрового сигнала с учетом по меньшей мере следующих параметров: частоты, амплитуды, фазы и отклонения амплитуды;
- цифроаналоговый преобразователь, который преобразует цифровой сигнал, генерируемый упомянутым генератором, в аналоговый сигнал; и
- вычислительное средство:
• которое обеспечивает модуляцию аналогового сигнала, принимаемого из упомянутого преобразователя, таким образом, чтобы сформировать электрический сигнал, способный моделировать работу упомянутого датчика; и
• которое передает сформированный таким образом электрический сигнал.
Таким образом, благодаря настоящему изобретению и как описано ниже, создана система для моделирования датчика, имеющая множество преимуществ, в частности:
- создание интегрированной и недорогой системы, которая может быть включена в состав программируемого элемента или интегральной схемы типа специализированной интегральной схемы (СИС);
- возможность моделирования целого самолета с использованием нескольких модулей, синхронизированных друг с другом;
- получение высоких технических характеристик, в частности, в отношении точности частоты, мгновенного скачкообразного изменения частоты и управления сдвигом фаз между каналами;
- возможность моделирования случаев отказа оборудования, таких как утрата обмотки, гармонические искажения, межканальное затухание, перекрестные помехи и сбой в генерировании возбуждения.
Моделирующая система согласно настоящему изобретению, в частности, может быть использована для моделирования работы датчика любого из вышеупомянутых типов: LVDT, LVT, RVDT, RVT и кругового датчика положения (RESOLVER). Однако данная моделирующая система может также использоваться для моделирования работы датчика, предназначенного для измерения по меньшей мере одного конкретного параметра самолета, такого как скорость колеса, массовый расход топлива, вибрации и/или число оборотов двигателя.
Применительно к настоящему изобретению и в зависимости от типа датчика, который должна моделировать моделирующая система, последняя содержит:
- либо один моделирующий узел вышеупомянутого типа;
- либо множество моделирующих узлов вышеупомянутого типа, которые в этом случае устанавливаются параллельно.
Кроме того, в последнем случае упомянутая моделирующая система с достижением преимущества содержит один генератор, способный генерировать несущую частоту, которая позволяет осуществлять модуляцию, который связан со всеми вычислительными средствами упомянутой моделирующей системы, а также с синхронизирующим средством (которое синхронизирует различные генераторы).
В предпочтительном варианте осуществления упомянутый генератор моделирующего узла содержит:
- накапливающий сумматор фазы, который осуществляет частотную модуляцию сигнала;
- фазосдвигающее устройство, которое осуществляет фазовую модуляцию сигнала, принимаемого из накапливающего сумматора фазы;
- запоминающее устройство, которое включает в себя волновую таблицу, которая содержит двоичное описание синтезированного сигнала и которая осуществляет фазово-амплитудное преобразование данного сигнала;
- аттенюатор, который осуществляет амплитудную модуляцию сигнала, принимаемого из упомянутого запоминающего устройства; и
- суммирующее средство, которое обеспечивает сложение отклонения амплитуды с сигналом, принимаемым из упомянутого аттенюатора, и которое передает полученный в результате сигнал.
Кроме того, в одном конкретном варианте осуществления упомянутый генератор может также содержать:
- синхронизирующее средство, обеспечивающее параллельное включение упомянутого генератора с другими генераторами; и/или
- интерполятор, обеспечивающий улучшение отношения сигнал-шум выходного сигнала из упомянутого генератора; и/или
- цитирующее средство, позволяющее снизить низкочастотные пределы синусоидальных сигналов без одновременного изменения расчетных параметров, таких как размер волновой таблицы и частота устройства. Следовательно, без изменения этих двух расчетных параметров данное средство способно получить в два-четыре раза более низкие частоты; и/или
- переключающее средство, обеспечивающее переключение источника амплитудной модуляции; и/или
- средство ограничения шума, обеспечивающее цифровое ограничение шума для выходного сигнала из упомянутого генератора.
Прилагаемые чертежи позволяют лучше понять способ осуществления настоящего изобретения. На данных чертежах одинаковые ссылочные позиции обозначают одинаковые элементы.
Фиг.1 и 2 соответственно изображают общие схемы моделирующей системы согласно настоящему изобретению в двух разных вариантах осуществления.
Фиг.3 изображает общую схему варианта осуществления на основе генератора, который является частью моделирующей системы согласно настоящему изобретению.
Фиг.4 схематично иллюстрирует конкретный вариант осуществления генератора, который является частью моделирующей системы согласно настоящему изобретению.
Моделирующая система 1, соответствующая настоящему изобретению и схематично проиллюстрированная в различных вариантах осуществления на фиг.1 и 2, предназначена для моделирования работы датчика (не показан), задачей которого, в общем, является преобразование физических параметров в электрические сигналы.
Для этого упомянутая моделирующая система 1 содержит по меньшей мере один моделирующий узел 2, как показано на фиг.1, который содержит:
- генератор 3, который обеспечивает генерирование посредством прямого цифрового синтеза частоты типа прямого цифрового синтеза (Direct Digital Synthesis - DDS) цифрового сигнала с учетом по меньшей мере следующих параметров: частоты, амплитуды и фазы (и обычно также отклонения амплитуды и коэффициента усиления);
- цифроаналоговый преобразователь 4 обычного типа, который посредством соединения 5 соединяется с упомянутым генератором 3 и который преобразует цифровой сигнал, генерируемый данным генератором 3, в аналоговый сигнал; и
- вычислительное средство 6:
• которое посредством соединения 7 соединяется с упомянутым цифроаналоговым преобразователем;
• которое обеспечивает модуляцию аналогового сигнала, принимаемого из упомянутого преобразователя 4, таким образом, чтобы сформировать электрический сигнал, способный моделировать работу упомянутого датчика; и
• которое передает сформированный таким образом электрический сигнал посредством соединения 8 в устройство пользователя (не проиллюстрировано).
Таким образом, благодаря настоящему изобретению и как описано ниже, создана система 1 для моделирования датчика, которая обеспечивает много преимуществ, в частности:
- создание интегрированного и недорогого устройства, которое может быть включено в состав программируемого элемента или интегральной схемы типа специализированной интегральной схемы (СИС);
- возможность моделирования целого самолета с использованием нескольких модулей, синхронизированных друг с другом;
- получение высоких технических характеристик, в частности, в отношении точности частоты, мгновенного скачкообразного изменения частоты и управления сдвигом фазы между каналами;
- возможность моделирования случаев отказа оборудования, таких как утрата обмотки, гармонические искажения, межканальное затухание, перекрестные помехи и сбой в генерировании возбуждения.
Моделирующая система 1 согласно настоящему изобретению, в частности, может быть использована для моделирования работы датчика любого из перечисленных ниже обычных типов: LVDT, LVT, RVDT, RVT и кругового датчика положения (RESOLVER).
Известно, что:
- датчиком LVDT является преобразователь, который изменяет напряжение пропорционально перемещению ферромагнитного сердечника. Данный датчик содержит основную катушку, возбуждаемую периодически изменяющимся сигналом возбуждения, и две вспомогательные катушки. Сердечник перемещается внутри данных катушек, направляет магнитный поток и генерирует напряжения в каждой вспомогательной катушке, амплитуды которых зависят от положения данной катушки;
- датчик RVDT подобен датчику LVDT, но он использует вращающийся ферромагнитный сердечник;
- датчиками LVT и RVT являются датчики LVDT и RVDT соответственно, но оснащенные одной вспомогательной катушкой;
- круговой датчик положения вместо ферромагнитного сердечника содержит элемент возбуждения, выполняющий функцию ротора, и две вспомогательные обмотки, расположенные под углом 90° таким образом, чтобы выполнять функцию статоров.
Однако моделирующая система 1 согласно настоящему изобретению может также использоваться для моделирования датчиков, предназначенных для измерения конкретных параметров самолета, таких как скорость колеса, массовый расход топлива, вибрации и/или число оборотов двигателя.
Упомянутая моделирующая система 1, которая обеспечивает моделирование датчика, может, в частности, использоваться:
- для проверки правильности алгоритмов управления для системы сервоуправления, включающей в себя такой датчик; и/или
- для автоматизации процедур испытаний; и/или
- для проверки граничных условий для конкретных применений, которые трудно воспроизвести при использовании реальных датчиков, таких как внесение шума и сдвига фазы или возможная комбинации информации.
Применительно к настоящему изобретению и в зависимости от типа датчика, который должна моделировать моделирующая система 1, последняя включает в себя:
- либо один моделирующий узел 2 вышеупомянутого типа, как показано на фиг.1;
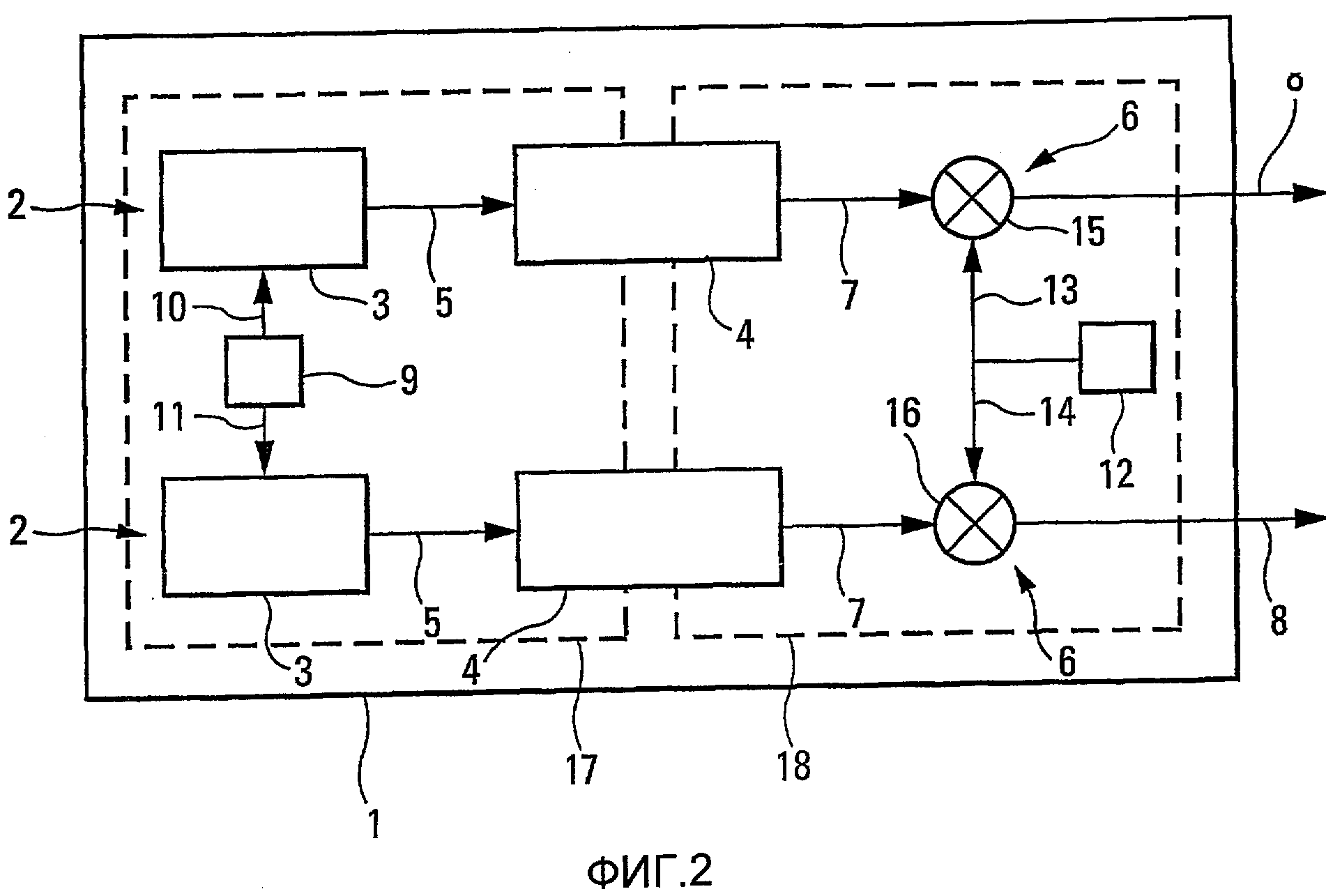
- либо множество моделирующих узлов 2 вышеупомянутого типа, которые в данном случае устанавливаются параллельно, как показано на фиг.2.
В примерном варианте осуществления, проиллюстрированном на фиг.2, моделирующая система 1 содержит два моделирующих узла 2 (такие как моделирующий узел 2, проиллюстрированный на фиг.1), а также, в частности, следующие элементы:
- стандартное синхронизирующее средство 9, которое посредством соединений 10 и 11 соединяется с каждым из генераторов 3 упомянутых двух моделирующих узлов 2. Данное синхронизирующее средство 9, содержащее, например, стандартные часы, синхронизирует два моделирующих узла 2;
- один генератор 12, который посредством соединений 13 и 14 соответственно соединяется с множительными средствами 15 и 16. Данный генератор 12 и множительные средства 15, 16 образуют упомянутое вычислительное средство 6. Данный генератор 12 генерирует несущую Ve(t) [например, типа Ve(t)=A sin(WO.t), где А и WO - заданные параметры, а t обозначает время], которая умножается на выходной сигнал каждого из преобразователей 4 [K1(t) и K2(t) соответственно] таким образом, чтобы получить следующие выходные сигналы V1(t) и V2(t) на выходе упомянутых моделирующих узлов 2:
V1(t)=K1(t)A sin(WO.t),
V2(t)=K2(t)A sin(WO.t).
Множительные средства 15, 16 могут быть цифровыми или могут быть созданы посредством опорных входных сигналов цифроаналогового преобразователя.
Необходимо отметить, что синхронизирующее средство 9 обеспечивает сдвиг фазы между сигналами V1(t) и V2(t) и одновременное постепенное изменение параметров, таких как регулируемая частота.
На фиг.2 прямоугольники 17 и 18 из штриховых линий иллюстрируют цифровую часть и аналоговую часть соответственно упомянутой моделирующей системы 1.
Конечно, упомянутая моделирующая система 1 может содержать другое количество (три, четыре и т.д.) моделирующих узлов 2.
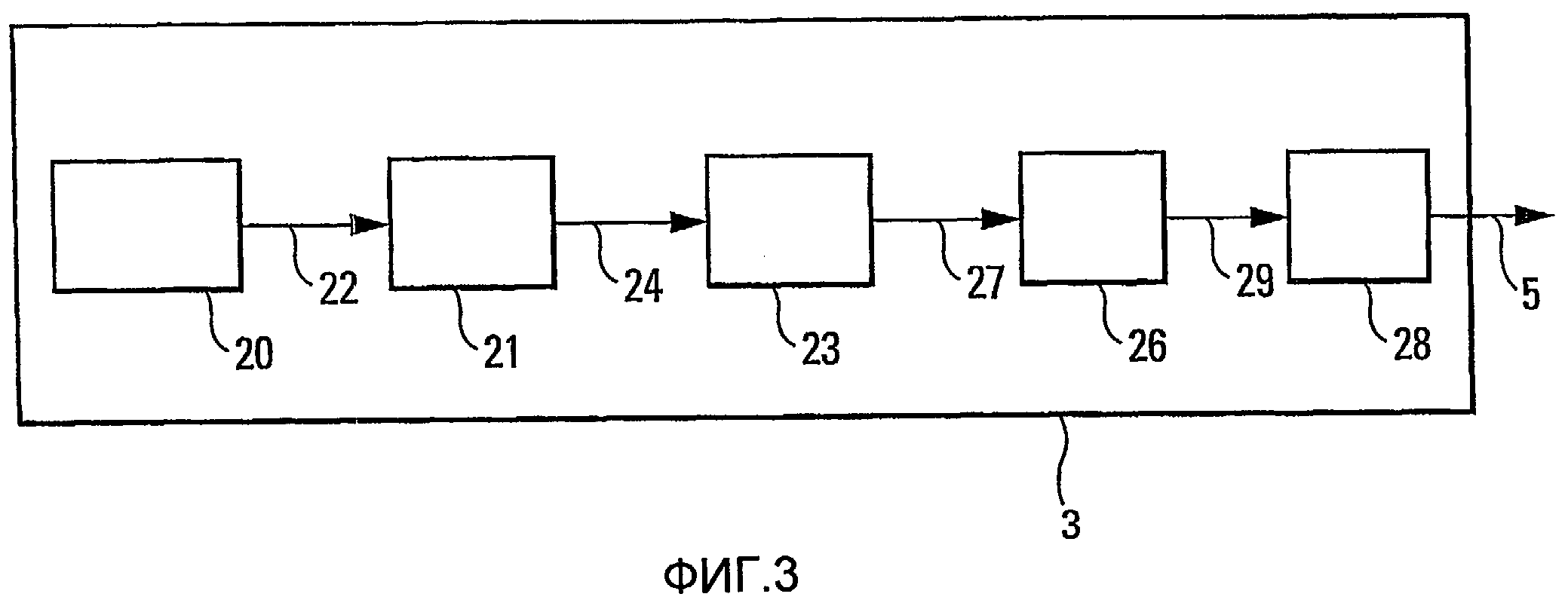
Кроме того, в предпочтительном варианте осуществления генератор 3 каждого моделирующего узла 2 моделирующей системы 1 согласно настоящему изобретению содержит, как проиллюстрировано на фиг.3:
- накапливающий сумматор 20 фазы, который осуществляет частотную модуляцию сигнала;
- фазосдвигающее устройство 21, которое посредством соединения 22 соединяется с упомянутым накапливающим сумматором 20 фазы и которое осуществляет фазовую модуляцию сигнала, принимаемого из упомянутого накапливающего сумматора 20 фазы;
- запоминающее устройство 23, которое посредством соединения 24 соединяется с упомянутым фазосдвигающим устройством 21. Данное запоминающее устройство 23 включает в себя волновую таблицу, которая содержит двоичное описание синтезированного сигнала. Оно осуществляет фазово-амплитудное преобразование данного сигнала;
- аттенюатор 26, который посредством соединения 27 соединяется с упомянутым средством 23 (запоминающим устройством) и который осуществляет амплитудную модуляцию сигнала, принимаемого из упомянутого средства 23; и
- суммирующее средство 28, которое посредством соединения 29 соединяется с упомянутым аттенюатором 26, которое обеспечивает суммирование отклонения амплитуды с сигналом, принимаемым из упомянутого аттенюатора 26, и которое передает полученный в результате сигнал посредством соединения 5.
Упомянутый генератор 3 использует электронную функцию, которая обеспечивает генерирование электрического сигнала произвольной формы. Основной принцип заключается в цитировании волновой таблицы и в генерировании электрического сигнала из следующих числовых параметров:
- частоты;
- амплитуды;
- фазы;
- отклонения амплитуды.
Необходимо отметить, что в генераторе 3, проиллюстрированном на фиг.3, имеется ввод данных (не показан) в устройства 20, 21, 23, 26 и 28, поступающих снаружи и соответствующих соответственно вышеупомянутым параметрам (частоте, фазе, описанию волновой таблицы, коэффициенту усиления/амплитуде, отклонению).
Применительно к настоящему изобретению термин «цитирование» волновой таблицы означает метод поиска в волновой таблице. Поиск выполняется подобно чтению страницы, в направлении сверху вниз. Машина таким же образом подходит к считыванию волновой таблицы для цитирования последней. Накапливающий сумматор фазы сканирует адреса в таблице с самого нижнего адреса до самого верхнего адреса посредством приращения. Скорость приращения зависит от частоты генерируемого сигнала. Чем выше частота, тем быстрее цитирование. Мгновенная амплитуда выходного сигнала соответствует каждому адресу в таблице. Таким образом, выходной сигнал является модулированным по частоте.
Накапливающим сумматором 20 фазы является сердечник упомянутого генератора 3. Данным накапливающим сумматором 20 фазы является N-разрядный регистр (N=M+T), скорость приращения которого устанавливается М-разрядным регистром и тактовой частотой Fosc. Т самых значимых разрядов накапливающего сумматора 20 фазы обеспечивают адресацию запоминающего устройства 23.
Накапливающий сумматор 20 фазы принимает двоичный код TW (для настроечного слова), который соответствует частоте синхронизированного выходного сигнала. Данный двоичный код TW устанавливает скорость сканирования фазы и, следовательно, частоту генерируемого сигнала. Накапливающий сумматор 20 фазы арифметически добавляет двоичный код, связанный с предыдущим результатом. Следовательно, для двоичного кода TW и длительности n выходной сигнал из накапливающего сумматора 20 фазы может соответствовать следующей величине: (n+1).TW.
Следовательно, результат выхода из накапливающего сумматора 20 соответствует пилообразному сигналу, наклон которого зависит от величины двоичного кода TW. Размер слова в двоичном коде на выходе накапливающего сумматора 20 фазы является более ограниченным, например, 32 разрядами.
Следовательно, в каждый момент времени изменение (осуществляемое оператором) в величине двоичного кода TW обеспечивает изменение в наклоне накапливающего сумматора 20 фазы и, таким образом, изменение выходной частоты.
По техническим причинам данные на выходе из накапливающего сумматора 20 фазы является усеченными, поскольку положение на тригонометрической окружности соответствует каждому мгновенному выходному значению. Поэтому сохраняется только верхняя часть результата из накапливающего сумматора 20 фазы. Следовательно, выходной сигнал состоит из двух частей:
- верхней части, которая соответствует мгновенной фазе выходного сигнала; и
- усеченной части, которая сохраняется для обратной связи накапливающего сумматора 20 фазы для ограничения эффектов усечения (округления).
Кроме того, фазосдвигающее устройство 21 добавляет верхнюю часть выходного сигнала из накапливающего сумматора 20 фазы в регистр, содержащий мгновенную фазу, для осуществления фазовой модуляции. Добавленная величина φ находится в пределах от 0° до 360°.
Кроме того, запоминающее устройство 23 содержит двоичное описание синтезированного сигнала. Содержимое данного запоминающего устройства является произвольным. Размер данного запоминающего устройства 23, напротив, фиксируется размером усечения на выходе из накапливающего сумматора 20 фазы. Таким образом, размер Т запоминающего устройства 23 соответствует следующему правилу:
Т=2N-M,
где N - размер двоичного кода TW;
M - размер усеченной части на выходе из накапливающего сумматора 20 фазы.
Данные на выходе из накапливающего сумматора 21 фазы выполняют функцию указателя в волновой таблице. Поиск в данной волновой таблице является более или менее быстрым в зависимости от величины двоичного кода TW на входе в накапливающий сумматор 20 фазы.
Кроме того, амплитудный модулятор или аттенюатор 26, который расположен на выходе из волновой таблицы, принимает мгновенную амплитуду синтезированного сигнала как информацию из волновой таблицы. Данный аттенюатор 26 перемножает регистр амплитудной модуляции с данными на выходе из средства 23.
Запоминающее устройство 23 сохраняет реконфигурируемую форму сигнала, которая цитируется с частотой накапливающего сумматора 20 фазы. Например, данная форма сигнала может быть синусоидальной, треугольной или любого другого типа.
Когда генератор 3 должен передавать на свой выход сигнал So в виде:
So=A sin(θt+φ)+B,
он формируется таким образом, чтобы генерировать:
- сигнал θt на выходе из накапливающего сумматора фазы (определяющего частоту);
- сигнал θt+φ на выходе из фазосдвигающего устройства 21 (создающего сдвиг фазы величиной φ);
- сигнал (θt+φ) на выходе из устройства 23 (определяющего форму сигнала, например, синусоидального типа);
- сигнал A sin(θt+φ) на выходе из аттенюатора 26 (осуществляющего амплитудную модуляцию с величиной А);
- упомянутый сигнал A sin(θt+φ)+B на выходе из суммирующего устройства 28 (создающего отклонение амплитуды величиной В).
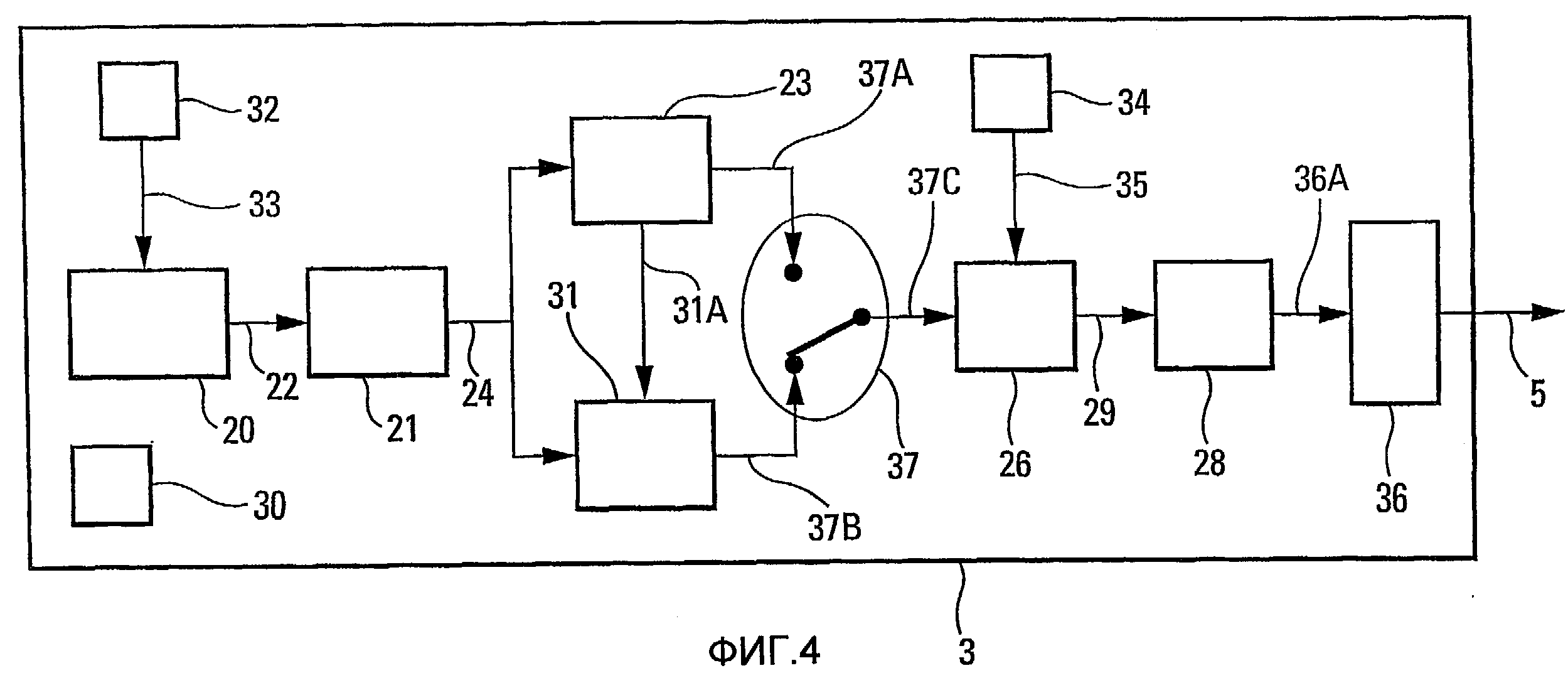
Кроме того, в конкретном варианте осуществления, представленном на фиг.4, упомянутый генератор 3 также содержит:
- синхронизирующее средство 30, обеспечивающее параллельное включение генератора 3 с другими генераторами. Доступными режимами синхронизации являются, в частности: временная синхронизация, частотная синхронизация, синхронизация по событиям (запуск);
- интерполятор 31 (линейный, второго порядка и др.), который соединяется, например, посредством соединений 31А и 24 соответственно с устройством 23 и фазосдвигающим устройством 21 и который обеспечивает улучшение отношения сигнал-шум без одновременного изменения размера волновой таблицы. Вычисление интерполяции основано на дробной части из накапливающего сумматора 20 фазы. Данный интерполятор установлен параллельно с устройством 23 и соединяется со средством выбора 37, которое посредством соединений 37А, 37В и 37С соединяется соответственно с устройствами 23, 31 и 26;
- цитирующее средство 32, которое, например, посредством соединения 33 соединяется с упомянутым накапливающим сумматором 20 фазы и которое обеспечивает несколько режимов цитирования волновой таблицы для снижения низкочастотных пределов синусоидальных сигналов без одновременного изменения двоичного решения генератора 3.
- переключающее средство 34, которое, например, при помощи соединения 35 соединяется с упомянутым аттенюатором 26 и которое обеспечивает переключение источника амплитудной модуляции либо внутри (цифровая модуляция), либо посредством получения внешнего опорного напряжения; и
- средство 36 ограничения шума, которое установлено позади упомянутого суммирующего устройства 28 (с которым оно соединяется, например, посредством соединения 36А) и которое обеспечивает цифровое ограничение шума для выходного сигнала таким образом, чтобы избавить его от скачков вследствие возможных ошибок знакового разряда.
Реферат
Настоящее изобретение относится к системе для моделирования датчика. Технический результат - расширение области использования. Моделирующая система (1) содержит генератор (3), который генерирует цифровой сигнал посредством прямого цифрового синтеза частоты на основе следующих параметров: частоты, амплитуды, фазы и отклонения амплитуды; цифроаналоговый преобразователь (4) и средство (6), которое модулирует сигнал, принимаемый из упомянутого преобразователя (4). 7 з.п. ф-лы, 4 ил.
Формула
генератор (3), который обеспечивает генерирование, посредством прямого цифрового синтеза частоты, цифрового сигнала, с учетом, по меньшей мере, следующих параметров: частоты, амплитуды, фазы и отклонения амплитуды;
цифроаналоговый преобразователь (4), который преобразует цифровой сигнал, генерируемый упомянутым генератором (3), в аналоговый сигнал; и
вычислительное средство (6):
которое осуществляет модуляцию аналогового сигнала, принимаемого из упомянутого преобразователя (4) таким образом, чтобы сформировать электрический сигнал, способный моделировать работу упомянутого датчика; и
которое передает сформированный таким образом электрический сигнал;
причем моделирующая система дополнительно содержит:
одно средство (12) генерирования, выполненное с возможностью генерирования несущей частоты, которая позволяет осуществлять модуляцию, и которое соединено со всеми вычислительными средствами (6) упомянутой моделирующей системы (1), а также
синхронизирующее средство (9), которое синхронизует генераторы.
накапливающий сумматор (20) фазы, который осуществляет частотную модуляцию сигнала;
фазосдвигающее средство (21), которое осуществляет фазовую модуляцию сигнала, принимаемого из накапливающего сумматора (20) фазы;
запоминающее устройство (23), которое включает в себя волновую таблицу, которая содержит двоичное описание синтезированного сигнала и которое осуществляет фазово-амплитудное преобразование данного сигнала;
аттенюатор (26), который осуществляет амплитудную модуляцию сигнала, принимаемого из упомянутого запоминающего устройства (23); и
суммирующее средство (28), которое обеспечивает сложение отклонения амплитуды с сигналом, принимаемым из упомянутого аттенюатора (26), и которое передает полученный в результате сигнал.
Комментарии