Способ и система для предотвращения столкновения между механическими руками и медицинский робот - RU2777566C1
Код документа: RU2777566C1
Чертежи






Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка испрашивает приоритет заявки на патент КНР № 201811472969.3, озаглавленной «Method and System for Preventing Collision Between Mechanical Arms, and Medical Robot» и поданной 4 декабря 2018 г., содержание которой явным образом включено в настоящий документ посредством ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к области технологии медицинских роботов, и в частности к способу и системе для предотвращения столкновения между механическими руками и медицинскому роботу.
УРОВЕНЬ ТЕХНИКИ
[0003] В настоящее время медицинскому роботу в целом требуется управлять множеством механических рук для взаимодействия друг с другом во время конкретной операции. Однако во время перемещений механических рук между механическими руками легко возникают взаимные помехи, столкновения и другие недостатки.
[0004] Например, в процессе выполнения связанных операций, таких как обнаружение и хирургическое вмешательство, медицинский робот с телеуправлением обычно управляет более чем двумя механическими руками, такими как руки для инструментов, для совместной работы, так что медицинский инструмент, переносимый каждой рукой, может быть перемещен в ожидаемое положение, а затем целенаправленно выполняются операции, такие как обнаружение или хирургическое вмешательство. Однако во время перемещений механических рук, из-за малого расстояния между механическими руками, могут легко возникать риски взаимных помех и столкновения между механическими руками, что может негативно влиять на операции, такие как обнаружение или хирургическое вмешательство, что в серьезных случаях может даже вызвать медицинские несчастные случаи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Различные приведенные в качестве примера варианты осуществления в настоящем изобретении предоставляют способ и систему для предотвращения столкновения между механическими руками и медицинского робота.
[0006] В необязательном варианте осуществления в настоящем изобретении предусмотрен способ предотвращения столкновения между механическими руками, применяемыми для медицинского робота, при этом медицинский робот содержит по меньшей мере две механические руки, механическая рука содержит основную часть механической руки, основная часть механической руки содержит множество сочленений, указанный способ включает:
[0007] расположение множества дискретных точек на каждой механической руке;
[0008] определение первой информации о координатах каждой дискретной точки в глобальной системе координат;
[0009] получение первого относительного расстояния между двумя дискретными точками, расположенными на разных механических руках, согласно первой информации о координатах;
[0010] определение первой силы взаимодействия в каждой дискретной точке, прикладываемой каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию и соответствующему соотношению между первым относительным расстоянием и первой силой взаимодействия; и
[0011] получение силы в декартовой системе координат каждой механической руки согласно равнодействующей силе первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой из дискретных точек на другой механической руке, и обеспечение восприятия силы в декартовой системе координат оператором.
[0012] В указанном выше варианте осуществления способа для предотвращения столкновения между механическими руками дискретные точки располагают на механической руке и силы в каждой дискретной точке определяют согласно вычисленному расстоянию между дискретными точками на разных механических руках с получением равнодействующей силы сил взаимодействия, соответствующих каждой дискретной точке, и затем получают силу в декартовой системе координат каждой механической руки, и при этом оператор может воспринимать силу в декартовой системе координат в режиме реального времени, тем самым эффективно избегая недостатков, таких как взаимные помехи и столкновения между механическими руками.
[0013] В необязательном варианте осуществления по меньшей мере часть из механических рук дополнительно содержит медицинский инструмент, установленный на дальнем конце основной части механической руки, при этом расположение множества дискретных точек на каждой механической руке включает расположение дискретных точек на медицинском инструменте и/или основной части механической руки.
[0014] В необязательном варианте осуществления расположение множества дискретных точек на каждой механической руке включает:
[0015] определение информации о первом относительном положении дискретной точки относительно соответствующего сочленения.
[0016] В необязательном варианте осуществления механическая рука дополнительно содержит датчик положения, выполненный с возможностью определения информации о положении сочленения, при этом определение первой информации о координатах каждой дискретной точки в глобальной системе координат включает:
[0017] получение информации о положении сочленения посредством датчика положения и получение второй информации о координатах каждого сочленения в глобальной системе координат согласно информации о положении сочленения и кинематической модели; и
[0018] получение первой информации о координатах дискретной точки в глобальной системе координат согласно второй информации о координатах и информации о первом относительном положении.
[0019] В необязательном варианте осуществления определение первой силы взаимодействия, соответствующей каждой дискретной точке и каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию и соответствующему соотношению между первым относительным расстоянием и первой силой взаимодействия включает:
[0020] установку множества интервалов расстояния в диапазоне значений первого относительного расстояния, причем соответствующее соотношение, соответствующее по меньшей мере одному из интервалов расстояния, отличается от соответствующих соотношений, соответствующих другим интервалам расстояния; и
[0021] получение первой силы взаимодействия, соответствующей каждой дискретной точке и каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию между дискретными точками и соответствующему соотношению, которое соответствует интервалу расстояния, в котором находится первое относительное расстояние.
[0022] В необязательном варианте осуществления множество интервалов расстояния содержит первый интервал



[0023] при этом первая сила


[0024] при этом дискретные точки m и n представляют собой две дискретные точки на разных механических руках,




[0025] В необязательном варианте осуществления функция представляет собой:
[0026]

[0027]




[0028] В необязательном варианте осуществления расположение множества дискретных точек на каждой механической руке дополнительно включает:
[0029] определение коэффициента усиления дискретной точки каждой дискретной точки;
[0030] причем получение силы в декартовой системе координат каждой механической руки согласно равнодействующей силе первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой из дискретных точек на другой механической руке, включает:
[0031] получение равнодействующей силы всех первых сил взаимодействия, соответствующих каждой дискретной точке;
[0032] получение крутящего момента, соответствующего каждой дискретной точке, относительно соответствующего сочленения согласно равнодействующей силе всех первых сил взаимодействия, соответствующих каждой дискретной точке, и информации о первом относительном положении каждой дискретной точки относительно соответствующего сочленения, и получение результирующего крутящего момента, соответствующего каждому сочленению, согласно коэффициенту усиления дискретной точки каждой дискретной точки; и
[0033] получение силы в декартовой системе координат механической руки согласно результирующему крутящему моменту, соответствующему каждому сочленению, и матрице Якоби силы механической руки.
[0034] В необязательном варианте осуществления обеспечение восприятия силы в декартовой системе координат оператором включает:
[0035] отображение силы в декартовой системе координат устройством отображения.
[0036] В необязательном варианте осуществления механическая рука соединена с ведущим манипулятором, выполненным с возможностью управления перемещением механической руки, при этом обеспечение восприятия силы в декартовой системе координат оператором включает:
[0037] получение силы в декартовой системе координат ведущего манипулятора, выполненного с возможностью управления перемещением механической руки, согласно силе в декартовой системе координат механической руки;
[0038] получение крутящего момента, соответствующего каждому сочленению ведущего манипулятора, согласно матрице Якоби силы и силе в декартовой системе координат ведущего манипулятора; и
[0039] обеспечение двигателем, выполненным с возможностью управления перемещением сочленения ведущего манипулятора, соответственно выдачи крутящего момента сопротивления, имеющего ту же величину, но противоположное направление, относительно крутящего момента, соответствующего каждому сочленению ведущего манипулятора.
[0040] В необязательном варианте осуществления в настоящем изобретении также предусмотрена система для предотвращения столкновения между механическими руками, применяемая для медицинского робота, этот медицинский робот содержит по меньшей мере две механические руки, механическая рука содержит основную часть механической руки, основная часть механической руки содержит множество сочленений, указанная система содержит:
[0041] блок расположения дискретных точек, выполненный с возможностью расположения дискретных точек на механической руке;
[0042] запоминающее устройство, выполненное с возможностью хранения команд;
[0043] процессор, находящийся в связи с блоком расположения дискретных точек и запоминающим устройством, соответственно;
[0044] при этом команды, хранящиеся в запоминающем устройстве, при исполнении процессором выполняют этапы:
[0045] определение первой информации о координатах каждой дискретной точки в глобальной системе координат;
[0046] получение первого относительного расстояния между двумя дискретными точками на разных механических руках согласно первой информации о координатах;
[0047] определение первой силы взаимодействия в каждой дискретной точке, прикладываемой каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию и соответствующему соотношению между первым относительным расстоянием и первой силой взаимодействия; и
[0048] получение силы в декартовой системе координат каждой механической руки согласно равнодействующей силе первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой из дискретных точек на другой механической руке, и обеспечение восприятия силы в декартовой системе координат оператором.
[0049] В необязательном варианте осуществления по меньшей мере часть из механических рук дополнительно содержит медицинский инструмент, установленный на дальнем конце основной части механической руки, и при этом дискретная точка расположена на медицинском инструменте и/или основной части механической руки.
[0050] В необязательном варианте осуществления механическая рука дополнительно содержит датчик положения, выполненный с возможностью определения информации о положении сочленения, при этом датчик положения находится в связи с процессором;
[0051] блок расположения дискретных точек дополнительно выполнен с возможностью определения информации о первом относительном положении дискретной точки относительно соответствующего сочленения;
[0052] при этом команды, хранящиеся в запоминающем устройстве, при исполнении процессором дополнительно выполняют этапы:
[0053] определение датчиком положения информации о положении сочленения для сочленения и определение второй информации о координатах каждого сочленения в глобальной системе координат согласно информации о положении сочленения и кинематической модели; и
[0054] определение первой информации о координатах каждой дискретной точки в глобальной системе координат согласно второй информации о координатах каждого сочленения в глобальной системе координат и информации о первом относительном положении.
[0055] В необязательном варианте осуществления соответствующее соотношение между первым относительным расстоянием и первой силой взаимодействия предварительно сохранено в запоминающем устройстве;
[0056] или
[0057] система дополнительно содержит устройство ввода, выполненное с возможностью определения соответствующего соотношения между первым относительным расстоянием и первой силой взаимодействия во время хирургического вмешательства, для непосредственного исполнения процессором или сохранения в запоминающем устройстве.
[0058] В необязательном варианте осуществления диапазон значений первого относительного расстояния включает множество интервалов расстояния и соответствующее соотношение, соответствующее по меньшей мере одному из интервалов расстояния, отличается от соответствующих соотношений, соответствующих другим интервалам расстояния;
[0059] при этом команды, хранящиеся в запоминающем устройстве, при исполнении процессором дополнительно выполняют этапы:
[0060] получение первой силы взаимодействия, соответствующей каждой дискретной точке и каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию каждой дискретной точки и соответствующему соотношению, которое соответствует интервалу расстояния, в котором находится первое относительное расстояние.
[0061] В необязательном варианте осуществления заданное множество интервалов расстояния содержит первый интервал

[0062] при этом первая сила
[0063] при этом дискретные точки m и n представляют собой две дискретные точки на разных механических руках,
[0064] В необязательном варианте осуществления функция представляет собой:
[0065]

[0066]


[0067] В необязательном варианте осуществления блок расположения дискретных точек дополнительно выполнен с возможностью получения коэффициента усиления дискретной точки каждой дискретной точки;
[0068] при этом команды, хранящиеся в запоминающем устройстве, при исполнении процессором дополнительно выполняют этапы:
[0069] получение равнодействующей силы первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой из дискретных точек на другой механической руке;
[0070] получение крутящего момента, соответствующего каждой дискретной точке, относительно соответствующего сочленения согласно равнодействующей силе первых сил взаимодействия, соответствующих каждой дискретной точке, и информации о первом относительном положении каждой дискретной точки относительно соответствующего сочленения и получение результирующего крутящего момента, соответствующего каждому сочленению, согласно крутящему моменту, соответствующему дискретной точке, относительно соответствующего сочленения и коэффициенту усиления дискретной точки каждой дискретной точки; и
[0071] получение силы в декартовой системе координат механической руки согласно результирующему крутящему моменту, соответствующему каждому сочленению, и матрице Якоби силы механической руки.
[0072] В необязательном варианте осуществления система дополнительно содержит устройство сигнализации, соединенное с процессором, при этом команды, хранящиеся в запоминающем устройстве, при исполнении процессором дополнительно выполняют этапы:
[0073] когда первое относительное расстояние любой дискретной точки на механической руке меньше заданного расстояния предупреждения или равно ему, и/или когда сила в декартовой системе координат механической руки больше заданного порога силы, запуск сигнализации с отправкой предупреждающего сообщения.
[0074] В необязательном варианте осуществления система дополнительно содержит:
[0075] устройство отображения, процессор, дополнительно выполненный с возможностью отображения силы в декартовой системе координат посредством устройства отображения.
[0076] В необязательном варианте осуществления медицинский робот содержит:
[0077] по меньшей мере две механические руки, при этом механическая рука включает основную часть механической руки, основная часть механической руки включает множество сочленений; и
[0078] систему для предотвращения столкновения между механическими руками согласно любому из вышеупомянутых вариантов осуществления.
[0079] В необязательном варианте осуществления медицинский робот дополнительно содержит сторону врача, сторону пациента и сторону управления;
[0080] при этом сторона врача, сторона пациента и система для предотвращения столкновения между механическими руками соответственно находятся в связи со стороной управления; при этом механическая рука расположена на стороне пациента; сторона врача содержит ведущий манипулятор, ведущий манипулятор содержит множество сочленений и двигатель, приводящий сочленение в движение, при этом ведущий манипулятор выполнен с возможностью управления передвижением механической руки; причем сторона управления выполнена с возможностью установки силы в декартовой системе координат ведущего манипулятора согласно силе в декартовой системе координат механической руки, полученной из системы для предотвращения столкновения между механическими руками; и
[0081] сторона управления дополнительно выполнена с возможностью получения крутящего момента, соответствующего каждому сочленению ведущего манипулятора, согласно силе в декартовой системе координат и матрице Якоби силы ведущего манипулятора и управления двигателем для выдачи крутящего момента сопротивления, имеющего ту же величину, но противоположное направление, относительно крутящего момента, чтобы обеспечивать восприятие силы в декартовой системе координат механической руки оператором.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0082] Чтобы более четко описать техническое решение в вариантах осуществления или предшествующем уровне техники, ниже будут кратко представлены сопроводительные графические материалы, необходимые для использования в описании варианта осуществления или предшествующего уровня техники. Очевидно, что графические материалы в нижеследующем описании представляют собой просто некоторые варианты осуществления настоящего изобретения, и специалисты в данной области техники могут получить графические материалы других вариантов осуществления на основании этих графических материалов без творческой работы.
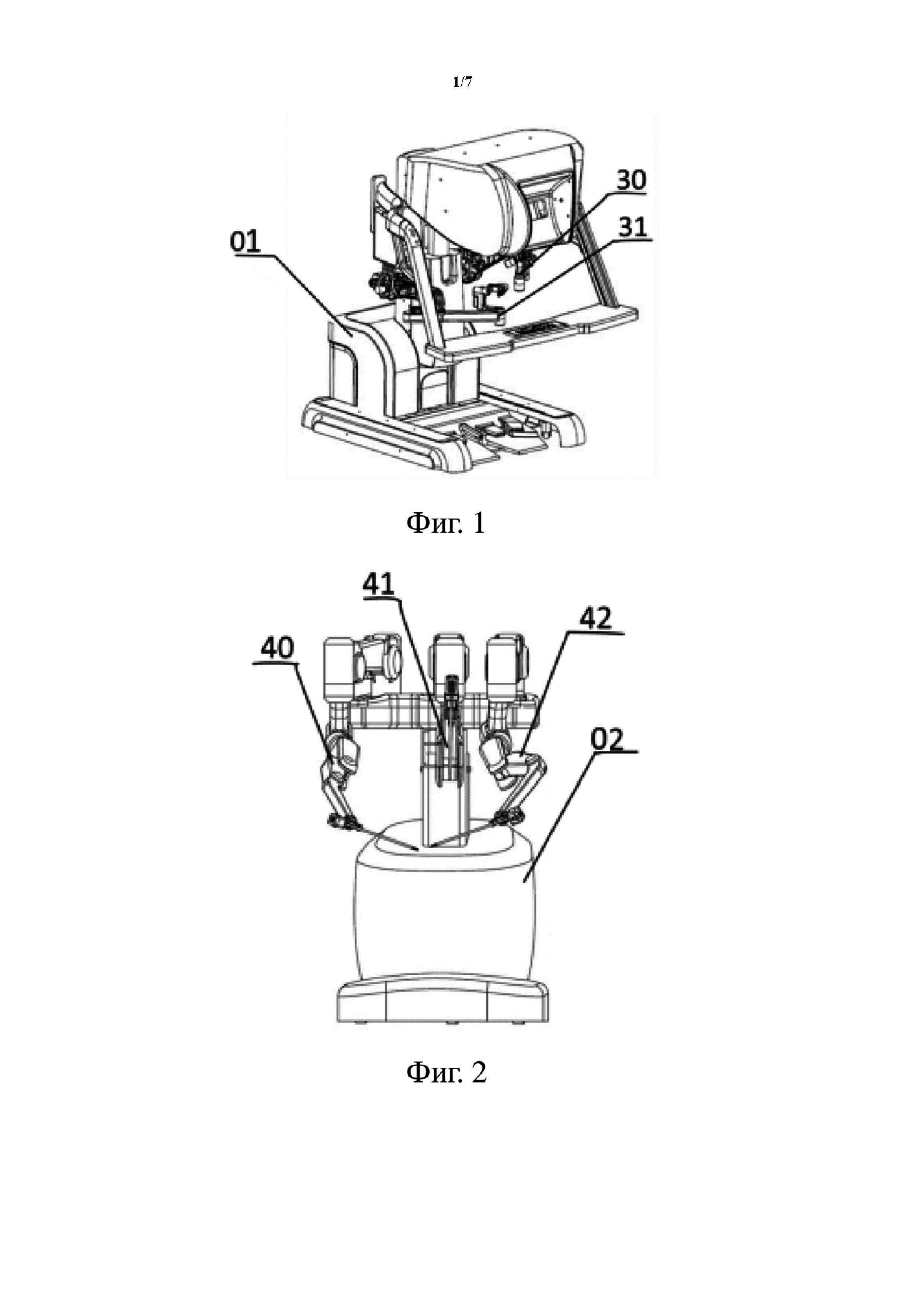
[0083] На фиг. 1 представлено схематическое изображение структуры стороны управления в медицинском роботе с телеуправлением согласно необязательному варианту осуществления.
[0084] На фиг. 2 представлено схематическое изображение структуры стороны пациента в медицинском роботе с телеуправлением согласно необязательному варианту осуществления.
[0085] На фиг. 3 представлено схематическое изображение модульной структуры медицинского робота с телеуправлением согласно необязательному варианту осуществления.
[0086] На фиг. 4 представлено схематическое изображение модульной структуры системы для предотвращения столкновения между механическими руками согласно необязательному варианту осуществления.
[0087] На фиг. 5 представлено схематическое изображение расположения дискретных точек блоком расположения дискретных точек согласно необязательному варианту осуществления.
[0088] На фиг. 6 представлен схематический график кривой, демонстрирующей взаимосвязь между первым относительным расстоянием и первой силой взаимодействия согласно необязательному варианту осуществления.
[0089] На фиг. 7 показано схематическое изображение расположения дискретных точек для хирургического инструмента в медицинском роботе с телеуправлением согласно необязательному варианту осуществления.
[0090] На фиг. 8 представлено схематическое изображение, иллюстрирующее сечение A-A в дискретной точке 404x вдоль линии A, показанной на фиг. 7.
[0091] На фиг. 9 представлено схематическое изображение, иллюстрирующее ориентацию механической руки медицинского робота с телеуправлением согласно необязательному варианту осуществления.
[0092] На фиг. 10 представлено схематическое изображение, иллюстрирующее силу в каждой дискретной точке, представленной на фиг. 9.
[0093] На фиг. 11 представлено схематическое изображение, иллюстрирующее силу на ведущем манипуляторе в медицинском роботе с телеуправлением согласно необязательному варианту осуществления.
[0094] На фиг. 12 представлена блок-схема, показывающая способ для предотвращения столкновения между механическими руками согласно необязательному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0095] Чтобы сделать цели, техническое решение и преимущества настоящего изобретения более ясными, настоящее изобретение будет дополнительно подробно описано со ссылкой на сопроводительные графические материалы и варианты осуществления. Следует понимать, что конкретные варианты осуществления, описанные здесь, используются только для объяснения настоящего изобретения, а не для ограничения настоящего изобретения.
[0096] В настоящем изобретении для каждого компонента одна сторона, смежная с пациентом, является дальней стороной или задней стороной; а другая сторона является ближней стороной или передней стороной.
[0097] Техническое содержание настоящего изобретения подробно описано ниже на примере медицинского робота с телеуправлением в сочетании с реальными ситуациями.
[0098] Медицинские роботы с телеуправлением обычно содержат компоненты, такие как сторона управления, сторона врача и сторона пациента. Как сторона врача, так и сторона пациента находятся в связи со стороной управления, то есть сторона врача управляет соответствующим медицинским оборудованием на стороне пациента посредством стороны управления для выполнения соответствующего обнаружения или хирургического вмешательства и т. п. Как правило, на стороне пациента установлено более трех механических рук и механическая рука может содержать основную часть механической руки (такую как рука для инструмента) и датчик положения. Основная часть механической руки может содержать множество сочленений и соединительных тяг, соединенных посредством сочленений; и при этом датчик положения выполнен с возможностью получения информации о положении каждого сочленения (например, угла поворота поворотного сочленения, смещения перемещения призматического сочленения и т. д.). По меньшей мере часть роботизированных рук может также содержать медицинский инструмент, такой как хирургический инструмент, или инструмент для обнаружения, установленный на дальней стороне вышеуказанной основной части роботизированной руки; и сторона врача может быть снабжена ведущим манипулятором, то есть оператор может управлять инструментом для обнаружения посредством ведущего манипулятора в режиме ведущий-ведомый для определения хирургической среды и может управлять основной частью механической руки и/или хирургическим инструментом посредством главного манипулятора в режиме ведущий-ведомый для выполнения совместно проводимых хирургических операций и т. д.
[0099] Следует отметить, что, если иное не указано в контексте, силы и крутящие моменты соответствующих медицинских инструментов (например, медицинских инструментов, таких как механические руки, хирургические инструменты, установленные на задней стороне основной части механической руки, инструменты для обнаружения и т. д.), определенные и относящиеся к стороне пациента, являются виртуальными физическими величинами, т. е. силы и крутящие моменты фактически не прикладываются физически между соответствующими механическими руками стороны пациента, а являются просто значениями параметров, определенными с помощью конкретных алгоритмов и/или процедур для описания актуальности столкновения между механическими руками. Для сравнения, фактические физические величины силы и крутящего момента, определенные по отношению к стороне пациента, которые могут отражать актуальность столкновения между механическими руками, также могут быть виртуальными физическими величинами, то есть сила и крутящий момент здесь могут быть восприняты на ощупь оператором через конкретное устройство (например, ведущий манипулятор) или могут восприниматься посредством зрения или слуха оператором через конкретное устройство (например, устройство отображения или динамик), которое не ограничивается в данном документе.
[00100] На фиг. 1 представлено схематическое изображение структуры стороны врача в медицинском роботе с телеуправлением согласно необязательному варианту осуществления, а на фиг. 2 представлено схематическое изображение структуры стороны пациента в медицинском роботе с телеуправлением согласно необязательному варианту осуществления. Как показано на фиг. 1-2, медицинский робот с телеуправлением может содержать консоль 01 на стороне врача и платформу 02 на стороне пациента; при этом на консоли 01 предусмотрены первый ведущий манипулятор 30 и второй манипулятор 31. Первая основная часть 40 механической руки, вторая основная часть 41 механической руки и третья основная часть 42 механической руки предоставлены на платформе 02; и медицинский инструмент, такой как хирургический инструмент или инструмент для обнаружения, может быть установлен на каждой основной части механической руки. В то же время каждая основная часть механической руки также может быть выполнена с возможностью передвижения медицинского инструмента, такого как хирургический инструмент или инструмент для обнаружения, установленного на каждой основной части механической руки для перемещения относительно неподвижной точки. В соответствии с соотношением отображения между перемещением ведущего манипулятора и перемещением механической руки, перемещением механической руки можно управлять посредством применения ведущего манипулятора, чтобы управлять инструментом для обнаружения с целью обнаружения и обзора хирургической среды целевого положения и управлять хирургическим инструментом с целью выполнения соответствующей обработки в целевом положении. Конкретная конфигурация основной части механической руки и конкретный тип медицинского инструмента конкретно не ограничены в приведенных в качестве примера вариантах осуществления настоящего изобретения.
[00101] На фиг. 3 представлено схематическое изображение, иллюстрирующее модульную структуру медицинского робота с телеуправлением согласно необязательному варианту осуществления. Как показано на фиг. 3, медицинский робот с телеуправлением может дополнительно содержать систему для предотвращения столкновения между механическими руками, которая может быть выполнена с возможностью выполнения операции, препятствующей столкновению, механической руки 21 медицинского робота с телеуправлением в вышеупомянутых вариантах осуществления. При работе медицинского робота с телеуправлением возможно эффективно предотвращать взаимное столкновение между механическими руками и обеспечивать считывание оператором состояния перемещения механических рук в режиме реального времени посредством обратной передачи информации об обнаруженном столкновении механических рук оператору принудительным образом, что будет более подробно описано ниже.
[00102] На фиг. 4 представлено схематическое изображение, показывающее модульную структуру системы для предотвращения столкновения между механическими руками согласно необязательному варианту осуществления. Как показано на фиг. 3-4, на механической руке 21 предусмотрен датчик 10 положения, который может определять информацию о положении каждого сочленения. Система 20 для предотвращения столкновения может содержать компоненты, такие как процессор 11, запоминающее устройство 12 и блок 14 расположения дискретных точек. Запоминающее устройство 12 выполнено с возможностью хранения команд или программ кода, которые при исполнении процессором могут обеспечить выполнение системой конкретных процессов. Процессор 11 может быть связан с датчиком 10 положения, запоминающим устройством 12 и блоком 14 расположения дискретных точек каждого сочленения, соответственно. Здесь блок 14 расположения дискретных точек может быть выполнен с возможностью расположения дискретных точек на основной части механической руки, например, руки для инструмента, и/или медицинском инструменте. Блок 14 расположения дискретных точек может также определять информацию о дискретных точках, такую как первое относительное положение каждой дискретной точки относительно соответствующего сочленения и коэффициент усиления дискретной точки каждой дискретной точки.
[00103] В некоторых вариантах осуществления запоминающее устройство 12 может хранить информационные данные, такие как информация о соотношении между первым относительным расстоянием и первой силой взаимодействия, информация о размере каждой механической руки и информация о дискретной точке. Вышеуказанная информация может быть заранее сохранена в запоминающем устройстве 12, например перед хирургическим вмешательством, во время инициализации системы или при выходе с завода, или информация может быть временно введена через устройство ввода во время хирургического вмешательства и непосредственно определена процессором 11 для выполнения, или сохранена в запоминающем устройстве 12. Информация о размере механической руки может включать информацию о размере основной части механической руки, информацию о размере медицинского инструмента (такого как хирургический инструмент и/или инструмент для обнаружения) и т.п. Кроме того, когда дискретные точки располагают на механической руке, количество и распределение дискретных точек может быть определено в соответствии с силовой чувствительностью обнаружения столкновения, требованиями хирургической операции и размером каждого компонента механической руки.
[00104] В другом необязательном варианте осуществления блок 14 расположения дискретных точек может располагать дискретные точки на основной части механической руки (например, руки для инструмента) и/или медицинском инструменте согласно команде, поданной процессором 11. В то же время процессор 11 также может выводить информацию о дискретной точке, такую как первое относительное положение каждой дискретной точки относительно соответствующего сочленения, коэффициент усиления дискретной точки каждой дискретной точки и т.п. на запоминающее устройство 12 для последующего извлечения процессором 11 или другими устройствами. В альтернативном решении запоминающее устройство 12 может также находиться в связи с блоком 14 расположения дискретных точек и может также быть выполнено с возможностью хранения информации о правиле расположения дискретных точек. Блок 14 расположения дискретных точек может располагать дискретные точки на основной части механической руки (например, руки для инструмента) и/или медицинском инструменте согласно информации о правиле расположения дискретных точек, предварительно сохраненной в запоминающем устройстве 12. В то же время процессор 11 также может сохранять информацию о дискретных точках, такую как первое относительное положение каждой дискретной точки относительно соответствующего сочленения, коэффициент усиления дискретной точки каждой дискретной точки и т.п. в запоминающем устройстве 12 для последующего извлечения процессором 11 или другими устройствами.
[00105] В необязательном варианте осуществления процессор 11 может быть дополнительно выполнен с возможностью получения первой информации о координатах каждой дискретной точки в глобальной системе координат согласно второй информации о координатах сочленений на каждой механической руке в глобальной системе координат и первому относительному положению дискретной точки относительно соответствующего сочленения, и получения первого относительного расстояния между дискретными точками согласно первой информации о координатах каждой дискретной точки, и получения первой силы взаимодействия и равнодействующей силы, соответствующей каждой дискретной точке, на основании соответствующего соотношения между первой силой взаимодействия и первым относительным расстоянием между дискретными точками. Равнодействующая сила может представлять собой равнодействующую силу всех первых сил взаимодействия, соответствующих каждой дискретной точке. Для любой механической руки процессор 11 может получать силу в декартовой системе координат (т.е. пространственную силу) механической руки на основании равнодействующих сил, соответствующих всем дискретным точкам на механической руке, и обеспечивать восприятие силы в декартовой системе координат оператором.
[00106] В другом необязательном варианте осуществления настоящего изобретения блок 14 расположения дискретных точек в варианте осуществления настоящего изобретения может также быть реализован программным обеспечением, аппаратным обеспечением или комбинацией программного обеспечения и аппаратного обеспечения и интегрирован с процессором 11; или функции процессора 11 и блока 14 расположения дискретных точек могут быть одновременно реализованы одним устройством обработки.
[00107] Следует учитывать, что дискретные точки в варианте осуществления настоящего изобретения могут быть сгенерированы системой согласно определенному правилу (например, правило может содержать информацию об установке интервала, и тогда дискретные точки могут быть расположены согласно информации об установке интервала, а размер интервала может быть установлен согласно требованиям к точности и работе), или может быть сгенерирован посредством ввода оператором информации о правиле и непосредственного считывания введенной информации о правиле процессором 11. Каждая дискретная точка в данном документе может быть приспособлена для представления одного объемного блока на соединительной тяге механической руки, и дискретная точка располагается в геометрическом центре соответствующего объемного блока. Следовательно, чем больше количество дискретных точек, тем большее количество объемных блоков представляют дискретные точки и, следовательно, тем меньше объем каждого объемного блока. Относительный размер объемного блока может быть представлен коэффициентом






[00108] На фиг. 5 представлено схематическое изображение расположения дискретных точек блоком расположения дискретных точек согласно необязательному варианту осуществления. Как показано на фиг. 3-5, основная часть механической руки первой механической руки 40 может содержать первое большое звено 401, первое среднее звено 402 и первое малое звено 403, которые последовательно соединены посредством сочленений. Первый хирургический инструмент 404 установлен на дальней стороне основной части механической руки первой механической руки 40 (т.е. на первом малом звене 403). А дискретных точек (т.е. дискретная точка 4011, дискретная точка 4012, …, дискретная точка 401a) могут быть установлены на первом большом звене 401; b дискретных точек (т.е. дискретная точка 4021, дискретная точка 4022, …, дискретная точка 402b) могут быть установлены на первом среднем звене 402; c дискретных точек (т.е. дискретная точка 4031, дискретная точка 4032, …, дискретная точка 403c) могут быть установлены на первом малом звене 403; d дискретных точек (т.е. дискретная точка 4041, дискретная точка 4042, …, дискретная точка 404d) могут быть установлены на первом хирургическом инструменте 404. Здесь a, b, c и d все являются натуральными числами. Подобным образом основная часть механической руки второй руки 41 для инструмента может содержать второе большое звено, второе среднее звено и второе малое звено, которые последовательно соединены посредством сочленений. Дальний конец основной части механической руки второй руки 41 для инструмента (т.е. второе малое звено) может быть выполнен с возможностью установки инструмента для обнаружения, такого как эндоскоп. Дискретные точки могут быть подобным образом расположены на втором большом звене, втором среднем звене, втором малом звене и инструменте для обнаружения. Основная часть механической руки третьей руки 42 для инструмента также может содержать третье большое звено, третье среднее звено и третье малое звено, которые последовательно соединены посредством сочленений. Дальний конец основной части механической руки третьей руки 42 для инструмента (т.е. третье малое звено) может быть выполнен с возможностью установки второго хирургического инструмента. Дискретные точки могут быть подобным образом расположены на третьем большом звене, третьем среднем звене, третьем малом звене и втором хирургическом инструменте. Во время расположения дискретных точек может быть определена информация о дискретных точках, такая как информация о первом относительном положении между дискретной точкой и соответствующим сочленением и коэффициент усиления дискретной точки каждой дискретной точки. «Сочленение, соответствующее дискретной точке» может относиться к сочленению, соединенному с ближним концом соединительной тяги (или медицинского инструмента), на которой находится дискретная точка.
[00109] Кроме того, как показано на фиг. 3-5, поскольку датчик 10 положения предусмотрен на сочленении каждой механической руки, информация о координатах (то есть вторая информация о координатах) каждого сочленения в глобальной системе координат может быть определена согласно каждому датчику 10 положения и каждому параметру кинематической модели, хранящейся в запоминающем устройстве 12 (например, параметру, такому как длина соединительной тяги в параметрическом способе D-H). Кроме того, посредством комбинирования соотношения положения каждой дискретной точки относительно ее соответствующего сочленения (т.е. информации о первом относительном положении), полученного при расположении дискретных точек, может быть найдена информация о координатах каждой дискретной точки в глобальной системе координат (т.е. первая информация о координатах).
[00110] Следует учитывать, что каждый из приведенных в качестве примера вариантов осуществления в настоящем изобретении не имеет конкретного ограничения на соотношение между первым относительным расстоянием и первой силой взаимодействия. Диапазон значений первого относительного расстояния представляет собой

[00111] На фиг. 6 представлен схематический график кривой, иллюстрирующей взаимосвязь между первым относительным расстоянием и первой силой взаимодействия согласно необязательному варианту осуществления. В конкретном варианте осуществления, показанном на фиг. 6, вертикальная координата F представляет первую силу взаимодействия и горизонтальная координата


[00112] В необязательном варианте осуществления первая сила


[00113] Здесь






[00114] В необязательном варианте осуществления функция
[00115]

[00116] Здесь



[00117] На фиг. 7 показано схематическое изображение расположения дискретных точек для хирургического инструмента в медицинском роботе с телеуправлением согласно необязательному варианту осуществления, а на фиг. 8 показано схематическое изображение, иллюстрирующее сечение A-A в дискретной точке 404x вдоль линии A, показанной на фиг. 7. Первая механическая рука 40 взята в качестве примера для описания со ссылкой на фиг. 3-8. В данном варианте осуществления максимальный радиус R404x сечения в любой дискретной точке 404x (x=1, 2, ..., a) на первом хирургическом инструменте 404 механической руки может быть получен заранее в соответствии с информацией во время проектирования инструмента первого хирургического инструмента 404. Подобным образом, максимальный радиус R сечения в дискретной точке на остальных механических руках может быть известен заранее. Под сечением в данном документе понимается поперечное сечение, т.е. поперечное сечение, перпендикулярное оси хирургического инструмента. Таким образом, можно получить
[00118] В настоящем варианте осуществления оператор может до операции задать множество интервалов расстояния и соответствующее соотношение между первым относительным расстоянием и первой силой взаимодействия в каждом интервале расстояния посредством использования процессора 11 и сохранить в запоминающем устройстве 12 для последующего извлечения. Очевидно, другие устройства также могут быть использованы для задания интервала расстояния и соответствующего соотношения между первым относительным расстоянием и первой силой взаимодействия в каждом интервале расстояния во время инициализации устройства или при его выходе с завода и для предварительного сохранения в запоминающем устройстве 12. Кроме того, процессор 11 может определять силу взаимодействия (т.е. первую силу взаимодействия), соответствующую каждой дискретной точке и дискретной точке на других механических руках, на основании соответствующего соотношения между первым относительным расстоянием и первой силой взаимодействия, сохраненным в запоминающем устройстве 12, и получать равнодействующую силу всех первых сил взаимодействия в соответствии с силами взаимодействия, а затем получать силу в декартовой системе координат каждой механической руки на основании равнодействующей силы всех первых сил взаимодействия, соответствующих каждой дискретной точке. Альтернативно система для предотвращения столкновения между механическими руками дополнительно содержит устройство ввода. Оператор может временно установить множество интервалов расстояния и соответствующее соотношение между первым относительным расстоянием и первой силой взаимодействия в пределах каждого интервала расстояния посредством устройства ввода во время хирургического вмешательства. В этом случае процессор 11 также может непосредственно определять соотношение между первым относительным расстоянием и первой силой взаимодействия.
[00119] На фиг. 9 представлено схематическое изображение, иллюстрирующее ориентацию механической руки медицинского робота с телеуправлением согласно необязательному варианту осуществления (вторая механическая рука 41 отсутствует, чтобы упростить обзор); и на фиг. 10 представлено схематическое изображение, иллюстрирующее силу в каждой дискретной точке, представленной на фиг. 9. Как показано на фиг. 9, хирургические инструменты могут быть установлены на дальних концах основных частей механической руки первой механической руки 40 и третьей механической руки 42, и хирургические инструменты могут быть приведены в движение относительно неподвижной точки. Для каждой дискретной точки хирургического инструмента на первой механической руке 40 первая сила взаимодействия всех дискретных точек на третьей механической руке 42 относительно любой дискретной точки хирургического инструмента, установленного на первой механической руке 40, и первая сила взаимодействия всех дискретных точек на второй механической руке 41 относительно любой дискретной точки хирургического инструмента на первой механической руке 40 может быть получена посредством соответствующего соотношения между первым относительным расстоянием между разными дискретными точками и первой силой взаимодействия. Кроме того, вычисляют величину и направление равнодействующей силы всех первых сил взаимодействия, воспринимаемых каждой дискретной точкой на хирургическом инструменте первой механической руки 40, а затем получают результирующий крутящий момент, создаваемый первыми силами взаимодействия всех дискретных точек на хирургическом инструменте относительно сочленения, соединяющего хирургический инструмент с основной частью механической руки, в соответствии с равнодействующей силой первых сил взаимодействия, соответствующих каждой дискретной точке, которая соответствует сочленению, соединяющему хирургический инструмент с основной частью механической руки (т.е. каждой дискретной точке на хирургическом инструменте), и первым относительным положением каждой дискретной точки относительно сочленения, и коэффициентом

[00120] В частности, когда первая механическая рука 40 и третья механическая рука 42 находятся в конфигурациях, показанных на фиг. 10, координаты всех дискретных точек в глобальной системе координат могут быть определены в соответствии с параметрами датчика положения и первым относительным положением каждого сочленения на первой механической руке 40 и третьей механической руке 42. В настоящем варианте осуществления, посредством определения первого относительного расстояния между дискретными точками соответственно на двух механических руках (т.е. первой механической руке 40 и третьей механической руке 42), обнаруживается, что, за исключением того, что каждая первая сила взаимодействия между дискретной точкой 4047 на первой механической руке 40 и каждой из дискретных точек 4245, 4246, 4247 на третьей механической руке 42 и каждая первая сила взаимодействия между дискретной точкой 4048 на первой механической руке 40 и каждой из дискретных точек 4245, 4246, 4247 на третьей механической руке 42 на фигуре не равны нулю, первые силы взаимодействия между остальными дискретными точками равны нулю (то есть расстояние является более отдаленным, и при этом первое относительное расстояние больше


[00121] На фиг. 11 представлено схематическое изображение, иллюстрирующее силу на ведущем манипуляторе в медицинском роботе с телеуправлением согласно необязательному варианту осуществления. Как показано на фиг. 1-11, первой механической рукой 40 управляют посредством первого ведущего манипулятора 30 на стороне врача. Для того, чтобы обеспечить восприятие оператором силы в декартовой системе координат, сила Fd в декартовой системе координат первой ведущей управляющей руки 30 может быть получена согласно полученной силе в декартовой системе координат первой механической руки 40, и крутящий момент каждого сочленения первой ведущей управляющей руки 30 получают в соответствии с матрицей Якоби силы первого ведущего манипулятора 30, а затем получают крутящий момент MR сопротивления (с той же величиной крутящего момента каждого сочленения первой ведущей управляющей руки 30, но в направлении, противоположном крутящему моменту каждого сочленения первой ведущей управляющей руки 30), выдаваемый двигателем и предназначенный для управления перемещением каждого сочленения первой ведущей управляющей руки 30, чтобы передавать назад оператору.
[00122] В частности, сторона управления также может быть выполнена с возможностью масштабирования силы в декартовой системе координат первой механической руки 40 для получения силы Fd в декартовой системе координат первого ведущего манипулятора 30 на стороне врача. Тогда сторона управления может получать крутящий момент MR сопротивления, выдаваемый двигателем и предназначенный для управления перемещением каждого сочленения первого ведущего манипулятора 30, в соответствии с матрицей Якоби силы первого ведущего манипулятора 30. Аналогичным образом, после получения крутящего момента каждого сочленения второй ведущей управляющей руки 31 сторона управления может передавать крутящий момент для каждого сочленения первого ведущего манипулятора 30 и второго ведущего манипулятора 31 на двигатель ведущего манипулятора для выдачи крутящего момента сопротивления с той же величиной, но в противоположном направлении относительно крутящего момента, так что оператор сталкивается с соответствующим сопротивлением во время работы и, соответственно, воспринимает силу в декартовой системе каждой механической руки, тем самым достигая цели точного управления и эффективного предотвращения столкновения между механическими руками.
[00123] В другом необязательном варианте осуществления система для предотвращения столкновения дополнительно содержит устройство отображения, которое выполнено с возможностью отображения силы в декартовой системе координат, соответствующей дальней стороне каждой механической руки, в виде представления информации, такого как текст, графика, изображения и т.д., таким образом обеспечивается восприятие силы в декартовой системе координат оператором.
[00124] В другом необязательном варианте осуществления, как показано на фиг. 4, система для предотвращения столкновения может дополнительно содержать сигнализацию 13 в связи с процессором 11, т.е. когда первое относительное расстояние



[00125] В вышеупомянутых вариантах осуществления система для предотвращения столкновения может использоваться для обнаружения столкновения между двумя или более механическими руками, в которых механическая рука может содержать установленный медицинский инструмент. Специалистам в данной области техники будет понятно, что система и способ предотвращения столкновения в вариантах осуществления настоящего изобретения могут использоваться для обнаружения столкновения между основными частями механических рук, столкновения между основной частью механической руки и медицинским инструментом и/или столкновения между медицинскими инструментами и т.п.
[00126] На фиг. 12 представлена блок-схема, показывающая способ для предотвращения столкновения между механическими руками согласно необязательному варианту осуществления. Как показано на фиг. 12, в необязательном варианте осуществления настоящее изобретение дополнительно обеспечивает способ обнаружения для препятствования столкновению механических рук, который может быть применен к медицинскому роботу, такому как медицинский робот с телеуправлением, как показано на фиг. 1-11. Медицинский робот может иметь по меньшей мере две механические руки (например, две, три, четыре и т.д.), и каждая механическая рука может содержать основную часть механической руки; и основная часть механической руки может содержать множество сочленений и множество соединительных тяг, соединенных посредством множества сочленений. Например, сочленения на каждой основной части механической руки последовательно соединены с соединительными тягами. В то же время датчик положения для получения информации о положении сочленения предусмотрен на каждом сочленении. По меньшей мере часть механической руки может также содержать медицинский инструмент, установленный на дальней стороне основной части механической руки, такой как хирургический инструмент или инструмент для обнаружения. Поскольку, когда механические руки медицинского робота работают согласованно, механические руки (в том числе, но не ограничиваясь этим, между основными частями механических рук, между медицинскими инструментами, а также между основной частью механической руки и медицинским инструментом) легко задевают друг друга и сталкиваются друг с другом из-за небольшого интервала, способ согласно настоящему примеру обладает изобретательским усовершенствованием в отношении вышеупомянутых дефектов и может включать следующие этапы.
[00127] На этапе S10 на каждой механической руке предусматривают множество дискретных точек.
[00128] В частности, дискретные точки располагают на каждой механической руке в соответствии с такими факторами, как силовая чувствительность обнаружения столкновения, требования хирургической операции и размер каждого компонента механической руки. Например, множество дискретных точек могут быть расположены на каждой основной части механической руки. Для улучшения силовой чувствительности обнаружения столкновения различные дискретные точки могут быть равномерно расположены на каждой соединительной тяге, или дискретные точки могут быть распределены в области, где столкновение происходит относительно легко, в соответствии с такой информацией, как форма и размер каждой соединительной тяги, или каждая из дискретных точек может быть равномерно распределена на механической руке. Информация о размере может, в частности, включать различные трехмерные геометрические параметры, такие как длины, формы и объемы каждого сочленения и соединительной тяги на механической руке.
[00129] В необязательном варианте осуществления информацию о первом относительном положении каждой дискретной точки относительно соответствующего сочленения и информацию о параметрах, такую как коэффициент усиления дискретной точки каждой дискретной точки, также могут получать непрерывно.
[00130] Следует отметить, что когда механическая рука в варианте осуществления настоящего изобретения содержит медицинский инструмент, установленный на дальнем конце основной части механической руки, дискретные точки могут быть расположены на основной части механической руки и/или медицинском инструменте, то есть медицинский инструмент можно рассматривать как одну соединительную тягу основной части механической руки, так что обнаружение для препятствования столкновению может быть выполнено на основной части механической руки и установленном медицинском инструменте в целом.
[00131] На этапе S20 определяют первую информацию о координатах каждой дискретной точки в глобальной системе координат.
[00132] В частности, вторая информация о координатах каждой дискретной точки в глобальной системе координат может быть определена в соответствии с информацией о положении сочленения, полученной с помощью датчика положения, и заданной кинематической моделью; и первую информацию о координатах каждой дискретной точки в глобальной системе координат получают согласно второй информации о координатах и информации о первом относительном положении.
[00133] В необязательном варианте осуществления может быть расположено множество дискретных точек, и информация о первом относительном положении может быть получена после получения второй информации о координатах; и затем первую информацию о координатах получают согласно второй информации о координатах и информации о первом относительном положении.
[00134] На этапе S30 получают первое относительное расстояние между двумя дискретными точками, расположенными на разных механических руках, согласно первой информации о координатах.
[00135] В частности, первое относительное расстояние между дискретными точками, соответственно расположенными на разных механических руках, может быть получено согласно первой информации о координатах. То есть расстояние между любыми двумя дискретными точками, соответственно расположенными на разных механических руках, рассчитывают согласно первой информации о координатах двух дискретных точек, чтобы получить первое относительное расстояние между любыми двумя дискретными точками, соответственно расположенными на разных механических руках.
[00136] На этапе S40 определяют первую силу взаимодействия, соответствующую каждой дискретной точке и каждой дискретной точке на другой механической руке, согласно первому относительному расстоянию и соответствующему соотношению между первым относительным расстоянием и первой силой взаимодействия.
[00137] В приведенных в качестве примера вариантах осуществления настоящего изобретения отсутствует конкретное ограничение на соотношение между первым относительным расстоянием и первой силой взаимодействия. Диапазон значений первого относительного расстояния представляет собой
[00138] В необязательном варианте осуществления диапазон значений первого относительного расстояния содержит только один интервал расстояния, т.е. первая сила взаимодействия отрицательно коррелирует с первым относительным расстоянием в интервале
[00139] В другом необязательном варианте осуществления диапазон значений первого относительного расстояния может содержать множество разных интервалов расстояния, и соответствующее соотношение между первым относительным расстоянием и первой силой взаимодействия в каждом интервале расстояния по меньшей мере частично отличается.
[00140] Например, диапазон значений содержит первый интервал

[00141] В формуле
[00142] В другом необязательном варианте осуществления функция, которая является непрерывной на втором интервале расстояния, может иметь вид:

[00143] Здесь k представляет собой коэффициент усиления расстояние-сила и

[00144] На этапе S50 вычисляют равнодействующую силу первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой дискретной точке на другой механической руке.
[00145] В частности, для любой дискретной точки определяют первую силу взаимодействия, соответствующую этой дискретной точке и каждой из всех дискретных точек, расположенных на другой механической руке, и выполняют векторное суммирование всех первых сил взаимодействия с получением равнодействующей силы всех первых сил взаимодействия, соответствующих этой дискретной точке.
[00146] На этапе S60 определяют силу в декартовой системе координат каждой механической руки и обеспечивают восприятие силы в декартовой системе координат оператором.
[00147] В частности, крутящий момент сочленения, соответствующий каждой паре дискретных точек, получают согласно равнодействующей силе всех первых сил взаимодействия, соответствующих каждой дискретной точке, и информации о первом относительном положении каждой дискретной точки относительно соответствующего сочленения; и результирующий крутящий момент, соответствующий каждому сочленению, получают путем комбинирования коэффициентов

[00148] В настоящем варианте осуществления нет конкретного ограничения для способа, посредством которого может быть обеспечено восприятие оператором силы в декартовой системе координат каждой механической руки. В конкретном варианте осуществления сила в декартовой системе координат ведущего манипулятора 31, управляющего перемещением механической руки, может быть получена согласно определенной силе в декартовой системе координат механической руки, а затем крутящий момент каждого сочленения ведущего манипулятора 31 может быть получен с помощью, например, матрицы Якоби силы механической руки; и затем двигателем управляют для выдачи крутящего момента сопротивления с той же величиной, но противоположным направлением, относительно крутящего момента каждого сочленения ведущего манипулятора 31, так что рука оператора может воспринимать силу в декартовой системе координат механической руки.
[00149] В другом конкретном варианте осуществления сила в декартовой системе координат может также отображаться через устройство отображения в виде представления информации, такого как текст, графика, изображения и т.д., так что оператор может воспринимать силу в декартовой системе координат глазами.
[00150] В другом необязательном варианте осуществления, когда расстояние между любыми двумя дискретными точками, соответственно расположенными на разных механических руках, меньше заданного порога расстояния или полученная сила в декартовой системе координат больше, чем заданная сила для сигнализации, запускается предупреждающее сообщение, такое как звук, свет, электричество, вибрация или т.п. Например, порог расстояния может быть установлен в
[00151] Следует понимать, что хотя этапы в блок-схеме на фиг. 12 показаны в последовательности, указанной стрелками, эти этапы не обязательно выполняют в последовательности, указанной стрелками. Если в данном документе не указано иное, эти этапы не выполняются в строгом порядке и могут выполняться в других порядках. Кроме того, по меньшей мере часть этапов на фиг. 12 могут включать множество подэтапов или множество стадий, которые не обязательно выполняются в одно и то же время, но могут быть выполнены в разное время; и эти подэтапы или стадии могут не обязательно выполняться последовательно, но могут исполняться попеременно или поочередно с по меньшей мере частью других этапов, или подэтапов или стадий других этапов.
[00152] Специалисты в данной области техники понимают, что все или часть процессов в способах вышеупомянутых вариантов осуществления могут быть реализованы компьютерной программой, дающей команды соответствующему аппаратному обеспечению. Компьютерная программа может храниться на энергонезависимом машиночитаемом носителе данных. При исполнении компьютерной программы могут быть включены последовательности операций в вариантах осуществления способа. Любая ссылка на запоминающее устройство, хранилище, базу данных или другие носители, используемые в различных вариантах осуществления, представленных в данном документе, может предусматривать энергонезависимое и/или энергозависимое запоминающее устройство. Энергонезависимое запоминающее устройство может включать постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое программируемое ROM (EEPROM) или флэш-память. Энергозависимое запоминающее устройство может включать оперативное запоминающее устройство (RAM) или внешнюю кэш-память. В качестве иллюстрации, а не ограничения, оперативное запоминающее устройство RAM доступно в различных формах, таких как статическое RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью передачи данных (DDRSDRAM), расширенное SDRAM (ESDRAM), Synchlink DRAM (SLDRAM), шина памяти (Rambus), прямое RAM (RDRAM), динамическое RAM с внутренней шиной и непрерывным каналом (DRDRAM), динамическое RAM с шиной зпамяти (RDRAM) и т.д.
[00153] Вышеупомянутые различные технические признаки, включенные в соответствующие варианты осуществления, могут быть произвольно объединены, при этом для краткости описаны не все возможные комбинации технических признаков в вышеупомянутых вариантах осуществления. Однако до тех пор, пока нет конфликта в комбинациях технических признаков, комбинации технических признаков должны рассматриваться как объем настоящего изобретения.
[00154] Вышеупомянутые варианты осуществления являются лишь некоторыми приведенными для примера вариантами осуществления настоящего изобретения. Описания являются более конкретными и подробными и не предназначены для ограничения объема защиты настоящего изобретения. Следует отметить, что специалисты в данной области техники могут сделать несколько модификаций и усовершенствований, не отступая от идеи настоящего изобретения, и все они попадают в рамки объема защиты настоящего изобретения. Поэтому объем защиты настоящего изобретения должен определяться прилагаемой формулой изобретения.
Реферат
Группа изобретений относится к медицине, а именно к системе и способу предотвращения столкновения между механическими руками хирургического робота. Хирургический робот содержит по меньшей мере две механические руки. Одна механическая рука из по меньшей мере двух механических рук содержит основную часть, которая содержит сочленения. Способ включает: расположение множества дискретных точек на каждой механической руке; определение первой информации о координатах каждой дискретной точки в глобальной системе координат; получение первого относительного расстояния между двумя дискретными точками, расположенными на разных механических руках, согласно первой информации о координатах; определение первой силы взаимодействия в каждой дискретной точке, прикладываемой каждой из дискретных точек на другой механической руке, согласно первому относительному расстоянию и заранее заданному соответствующему соотношению между первым относительным расстоянием и первой силой взаимодействия; и получение силы в декартовой системе координат каждой механической руки согласно равнодействующей силе первых сил взаимодействия, каждая из которых соответствует каждой дискретной точке и каждой из дискретных точек на другой механической руке, и обеспечение восприятия силы в декартовой системе координат оператором. Достигается снижение риска взаимных помех и столкновения между механическими руками. 3 н. и 19 з.п. ф-лы, 12 ил.

Формула


Комментарии