Улучшенный электромеханический привод - RU2619630C2
Код документа: RU2619630C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к электромеханическому приводу и, более конкретно, к электромеханическому приводу, выполненному с возможностью сохранять работоспособность при застревании его внутренних механических компонентов.
Предпосылки создания изобретения
Линейные приводы используются во многих промышленных продуктах. В частности, в авиационной промышленности они используются в качестве приводов для поверхностей управления воздушного судна и других компонентов воздушного судна.
В целом, каждая поверхность управления воздушного судна приводится множеством линейных приводов параллельно, так что в случае потери мощности одного из них поверхность может управляться остальными приводами. Поскольку эта конфигурация имеет недостаток, заключающийся в том, что заедание одного из приводов может вызвать блокирование поверхности, в авиационных правилах требуются очень низкие вероятности заедания (порядка 10e-9) этих приводов. Гидравлические приводы могут соответствовать этим требованиям.
Тенденция к увеличению электрификации воздушного судна (“Более Электрическое Воздушное судно”, (“More Electrical Aircraft”) MEA)), направленная на уменьшение веса и затрат на обслуживание систем, привела к введению новых технологий в системах управления полетом, включая основные системы управления полетом.
Электрогидростатические приводы (EHAs) были встроены в новые платформы (A380, A400, A350, F35,…). Этот тип привода имеет встроенную гидравлическую систему, так что соединение с энергетической системой воздушного судна является чисто электрическим, но его передача энергии к поверхности управления воздушного судна осуществляется через встроенный гидравлический привод. Они соответствуют цели вероятности заедания, так передача энергии к поверхности выполняется посредством гидравлического привода и в это же время обеспечивает в воздушном судне исключение гидравлической системы воздушного судна. Эта технология рассматривается как промежуточный этап в постепенной электрификации приводных систем воздушного судна.
Электромеханические приводы (EMA) еще не были осуществлены в главных системах управления полетом (кроме экспериментальных применений), несмотря на их возможные преимущества относительно сложности, эффективности, веса и возможности обслуживания. Основные причины того, почему EMA не были введены в главные системы управления полетом, следующие:
- возможность заедания доступных в настоящее время не такая низкая, как требуется;
- обратимость этих приводов в случае потери электрической энергии не настолько хороша, как в случае приводов с гидравлической выходной ступенью, особенно если механическое преимущество между электрическим двигателем и выходом является высоким.
Обычно применяемые технологии в выходной ступени приводов EMA (в основном шариковые винты и механический редуктор) не гарантируют полностью упомянутые выше требования, так как:
- Механическая коробка передач, обычно присоединенная между электрическим двигателем и винтом, имеет более высокую вероятность заедания, чем требуемая для применения. Шариковый винт имеет такую же проблему из-за содержания рециркулирующих механических элементов, которые, будучи заблокированными, затрудняют или ухудшают перемещение винта до уровня потери работоспособности.
- Обратимость шарикового винта в случае заедания является низкой, так как обычно используются маленькие шаги для сведения к минимуму размера электрического двигателя.
Планетарные роликовые винты имеют преимущества над шариковыми винтами с такой же эффективностью в отношении силы, срока службы и грузоподъемности среди прочих. Их конструкция более проста и не включает в себя циркулирующие элементы. Тем не менее, они не лишены заедания их подвижных частей (роликов, синхронизирующей коронки, зубчатых колес и тому подобного) из-за присутствия наружного загрязнения, осколков и тому подобного, таким образом, приводя к заеданию выходного вала привода.
В US 7410132 и US 7610828 описаны шариковые винтовые линейные приводы, включающие в себя средство для отключения выходного вала в случае заедания.
Один недостаток этих предложений заключается в том, что шариковый винт имеет рециркулирующие элементы, подверженные заеданию в канале рециркуляции. Следовательно, они влекут за собой высокую вероятность заедания.
Другой недостаток заключается в том, что в обоих предложениях отпирание выходного линейного элемента осуществляется на уровне гайки винта. Затем, после отключения выходного линейного элемента, параллельный привод (в упомянутом выше случае – поверхности управления полетом, приводимой комплектом параллельных приводов) должен тянуть как винт, так и гайку. Это значит, что привод будет разработан с оставлением свободным объема, по которому проходят винт и гайка вдоль всего хода параллельного привода. К тому же, инерция, вытягиваемая параллельным приводом, является инерцией винта и гайки.
Также известен документ US2007/295125, в котором описан линейный привод, содержащий:
- вращающийся входной вал, приводимый электрическим двигателем;
- выходной вал, имеющий зону с винтовой резьбой в его наружной поверхности у его внутреннего конца;
- первое цилиндрическое зубчатое колесо, выполненное с возможностью вращения относительно его оси, когда входной вал вращается;
- множество вторых цилиндрических зубчатых колес, выполненных с возможностью зацепления с первым цилиндрическим зубчатым колесом и с выходным валом в его зоне с винтовой резьбой, так что вращение первого цилиндрического зубчатого колеса, во-первых, передается ко вторым цилиндрическим зубчатым колесам, которые вращаются относительно их оси, и, во-вторых, преобразуется в линейное перемещение выходного вала.
Краткое изложение сущности изобретения
Целью настоящего изобретения является разработка линейного привода, приводимого в действие электрическим двигателем, с более низкой вероятностью заедания, чем у известных линейных приводов с рециркулирующими элементами.
Другой целью настоящего изобретения является разработка линейного привода, обеспечивающего отсоединение выходного вала от других механических компонентов приводной цепи.
Эти и другие цели достигаются посредством двухступенчатого линейного привода, в котором первая ступень содержит вращающийся входной вал, приводимый в действие электрическим двигателем, имеющий зону с винтовой резьбой в его наружной поверхности у его внутреннего конца и множество первых косозубых цилиндрических зубчатых колес, выполненных с возможностью зацепления с вращающимся входным валом в его зоне с винтовой резьбой для совместного вращения; вторая ступень содержит множество вторых косозубых цилиндрических зубчатых колес, выполненных с возможностью зацепления с выходным валом, имеющим зону с винтовой резьбой в его наружной поверхности у его внутреннего конца, для преобразования вращения вторых косозубых цилиндрических зубчатых колес в линейное перемещение выходного вала, причем вторые косозубые цилиндрические зубчатые колеса также выполнены с возможностью зацепления с первыми косозубыми цилиндрическими зубчатыми колесами для совместного вращения.
Преимущественно, входной вал является полым валом, и выходной вал помещен во внутренний канал, содержащий внутреннюю часть входного вала.
Преимущественно, вторые косозубые цилиндрические зубчатые колеса имеют две резьбовые зоны на двух разных уровнях: первую резьбовую зону для зацепления с первыми косозубыми цилиндрическими зубчатыми колесами и вторую резьбовую зону для зацепления с зоной с винтовой резьбой выходного вала.
В варианте осуществления изобретения взаимодействующие пары первых и вторых косозубых цилиндрических зубчатых колес установлены в водилах зубчатой передачи с возможностью поворота относительно оси первых косозубых цилиндрических зубчатых колес, так что они могут удерживать вторые косозубые цилиндрические зубчатые колеса в зацепленном или расцепленном положении относительно выходного вала. Следовательно, линейный привод предусмотрен со средством для отключения выходного вала в случае заедания или в случае, если обнаружено опасное ухудшение состояния механического компонента.
Отключение осуществляется посредством взаимодействия водил зубчатой передачи с диском, установленным с возможностью вращения на выходном валу, для удерживания водил зубчатой передачи со вторыми косозубыми цилиндрическими зубчатыми колесами, зацепленными или расцепленными относительно выходного вала.
Конкретной областью применения линейного привода этого изобретения является приведение компонентов воздушного судна и, в частности, поверхностей управления воздушного судна.
Другие желательные признаки и преимущества линейного привода согласно этому изобретению будут понятны из последующего подробного описания изобретения и прилагаемой формулы изобретения, совместно с прилагаемыми чертежами.
Краткое описание чертежей
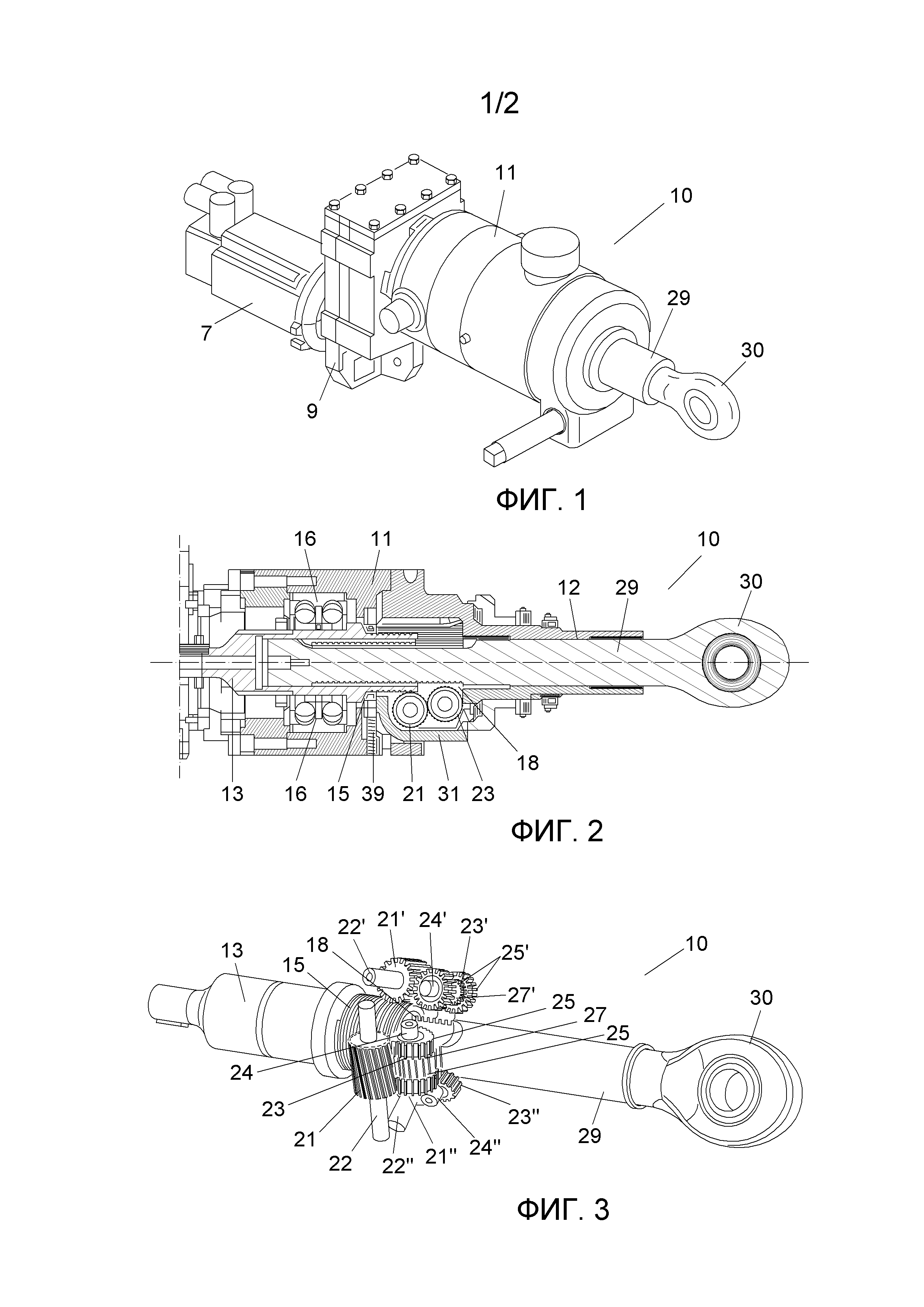
Фиг.1 представляет собой вид в перспективе линейного привода согласно варианту осуществления этого изобретения.
Фиг.2 представляет собой вид в частичном поперечном разрезе линейного привода согласно варианту осуществления этого изобретения.
Фиг.3 представляет собой вид в перспективе основных компонентов линейного привода согласно варианту осуществления этого изобретения.
Фиг.4a и 4b представляют собой виды в перспективе основных компонентов линейного привода согласно варианту осуществления этого изобретения, включающих в себя отключающее средство выходного вала в, соответственно, зацепленном и расцепленном положении.
Фиг.5 представляет собой вид в перспективе основных компонентов линейного привода согласно варианту осуществления этого изобретения, включающих в себя отключающее средство выходного вала, на котором показано средство, используемое для приведения в действие отключающего средства.
Подробное описание вариантов осуществления настоящего изобретения
На фиг.1 показан обзор линейного привода 10 для линейного перемещения приводного элемента 30 согласно варианту осуществления изобретения, который будет теперь описан.
Комплект линейных приводов 10 может быть использован, например, для приведения поверхности управления воздушного судна.
Линейный привод 10 преобразует вращательное перемещение входного вала, расположенного внутри кожуха 11, который приводится электрическим двигателем 7 через коробку 9 передач, в управляемое линейное перемещение выходного вала 29, к которому присоединен приводной элемент 30. Линейный привод 10 также мог бы быть непосредственно приведен электрическим двигателем.
На фиг.2 и 3 показаны основные компоненты линейного привода 10: входной вал 13, выходной вал 29, три первых косозубых цилиндрических зубчатых колеса 21, 21’, 21’’ и три вторых косозубых цилиндрических зубчатых колеса 23, 23’, 23’’ (несмотря на то, что на фиг.3 ясно показаны только первые цилиндрические зубчатые колеса 21, 21’ и вторые цилиндрические зубчатые колеса 23, 23’, номерные обозначения для первых цилиндрических зубчатых колес 21’’ и для второго цилиндрического зубчатого колеса 23’’ также включены в фиг.3 и будут использованы в этом описании).
Входной вал 13 установлен с возможностью вращения на кожухе 11 посредством пары радиально-упорных подшипников 16, предварительно нагруженных в осевом направлении для достижения требуемой жесткости. Он выполнен как полый цилиндр с зоной 15 с винтовой резьбой у его внутреннего конца на его наружной поверхности. У его наружной стороны он присоединен к коробке 9 передач.
Выходной вал 29 помещен в продольном канале, ограниченном входным валом 13 и трубчатым кожухом 12 внутри кожуха 11, чтобы он мог быть смещен продольно вдоль упомянутого канала. Он имеет зону 18 с винтовой резьбой на его наружной поверхности. Длина зоны 18 с винтовой резьбой является максимальной длиной, предусмотренной для смещения выходного вала 29. У его наружного конца выходной вал 29 присоединен к приводному элементу 30, имеющему подходящую форму для функции, выполняемой линейным приводом 10.
Первые косозубые цилиндрические зубчатые колеса 21, 21’, 21’’ расположены с возможностью зацепления с входным валом 13 в зоне 15 с винтовой резьбой. Они расположены тангенциально относительно входного вала 13, так что вращение входного вала 13 образует вращение трех цилиндрических зубчатых колес 21, 21’, 21’’ вокруг их оси 22, 22’, 22’’.
Вторые косозубые цилиндрические зубчатые колеса 23, 23’, 23’’ расположены с их осью 24, 24’, 24’’, параллельной оси 22, 22’, 22’’ первых косозубых цилиндрических зубчатых колес 21, 21’, 21’’ для зацепления, с одной стороны, с первыми косозубыми цилиндрическими зубчатыми колесами 21, 21’, 21’’ и, с другой стороны, с выходным валом 29 в его зоне 18 с винтовой резьбой. Вращение первых косозубых цилиндрических зубчатых колес 21, 21’, 21’’ передается к вторым косозубым цилиндрическим зубчатым колесам 23, 23’, 23’’, и вращение вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’ преобразуется в линейное перемещение выходного вала 29. Зацепление вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’ с первыми косозубыми цилиндрическими зубчатыми колесами 21, 21’, 21’’ выполнено в первых зонах 25, 25’, 25’с винтовой резьбой, и зацепление вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’ с зоной 18 с винтовой резьбой выходного вала 29 выполнено во вторых зонах 27, 27’, 27’’ с винтовой резьбой.
Упомянутые первая и вторая зоны 25, 25’, 25’; 27, 27’, 27’’ с винтовой резьбой расположены на разном уровне для того, чтобы позволить одновременное зацепление вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’ с первыми косозубыми цилиндрическими зубчатыми колесами 21, 21’, 21’’ и с выходным валом 29.
На фиг.4a, 4b и 4c показаны основные компоненты расположения первых косозубых цилиндрических зубчатых колес 21, 21’, 21’’ и вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’, которое обеспечивает полное отключение выходного вала 29, когда любой компонент линейного привода 10 отказывает.
Первые косозубые цилиндрические зубчатые колеса 21, 21’, 21’’ и вторые косозубые цилиндрические зубчатые колеса 23, 23’, 23’’ установлены парами 21, 23; 21’, 23’; 21’’, 23’’ в водилах 31, 31’, 31’’ зубчатой передачи, которые позволяют располагать вторые косозубые цилиндрические зубчатые колеса 23, 23’, 23’’ в зацепленном или расцепленном положении относительно выходного вала 29 во взаимодействии с диском 41, установленным с возможностью вращения на выходном валу 29.
Водила 31, 31’, 31’’ зубчатой передачи установлены с возможность поворачивания вокруг оси 22, 22’, 22’’ первых косозубых цилиндрических зубчатых колес 21, 21’, 21’’ (которые установлены с возможностью вращения на кожухе 11) посредством пружины 39 (см. фиг.2) и содержат выступающие лапки 33, 33’, 33’’ на их границе спереди от диска 41.
Диск 41 содержит осевое удлинение, имеющее его границу спереди от водил 31, 31’, 31’’ зубчатой передачи, выполненную посредством серий чередующихся выступов 43, 43’, 43’’ и углублений 45, 45’, 45’’.
Когда водила 31, 31, 31’ зубчатой передачи установлены с выступающими лапками 33, 33’, 33’ в соприкосновении с выступами 43, 43’, 43’’ диска 41 (смотри фиг.4a), водила 31, 31’, 31’’ зубчатой передачи расположены в зацепленном положении согласно заданным условиям предварительной нагрузки и регулировки вторых косозубых цилиндрических зубчатых колес 23, 23’, 23’’ относительно выходного вала 29, сводя к минимуму или предотвращая какое-либо его осевое перемещение.
Когда диск 41 поворачивается, и выступающие лапки 33, 33’, 33’ водил 31, 31’, 31 зубчатой передачи располагаются перед углублениями 45, 45’, 45’’ диска 41, водила 31, 31’, 31 зубчатой передачи поворачиваются в расцепленное положение (см. Фиг.4b) посредством пружины 39.
Диск 41 содержит, в качестве вращающего средства, эпициклическое зубчатое колесо 47, присоединенное к червячному приводу 49, приводимому подходящим приводным устройством 51, например, электрическим двигателем или соленоидом. Также могут быть рассмотрены другие типы приводных элементов для эпициклического зубчатого колеса 47, такие как косозубые зубчатые колеса (удерживаемые на месте тормозом, когда они не работают).
Линейный привод 10 дополнительно содержит управляющее средство, присоединенное к отслеживающему средству для определения застревания или ухудшения любого компонента для приведения в действие приводного устройства 51, когда отслеживающим средством определяется необходимость отключения выходного вала 29.
Упомянутое отслеживающее средство содержит в качестве определяющего средства специальные датчики (ускорения, силы), встроенные в линейный привод, или средство, использующее управляющие переменные линейного привода (электрический ток, напряжение, скорость, положение), или комбинацию их обоих, и систему цифровой диагностики, которая может в реальном времени получать доступ к развитию выбранных параметров (в области времени или в области частоты) и сравнивать их с ожидаемым развитием в случае линейного привода, не имеющего дефектов.
Одним преимуществом настоящего изобретения является то, что линейный привод не имеет рециркулирующих элементов, которые приводят к высокой вероятности заедания.
Другое преимущество настоящего изобретения заключается в том, что отключающий механизм действует на выходной вал. Следовательно, после отключения выходного вала параллельный привод (в упомянутом выше случае поверхности управления полетом, приводимой комплектом параллельных приводов) должен тянуть только выходной вал, обеспечивая более компактную конструкцию линейного привода и способствуя работе параллельного привода.
Реферат
Изобретение относится к линейным приводам, в частности применимо к поверхностям управления воздушного судна. Первая ступень содержит вращающийся входной вал, приводимый в действие электрическим двигателем, имеющий зону с винтовой резьбой в его наружной поверхности у его внутреннего конца и множество первых косозубых цилиндрических зубчатых колес, выполненных с возможностью зацепления с вращающимся входным валом в его зоне с винтовой резьбой для совместного вращения. Второй этап содержит множество вторых косозубых цилиндрических зубчатых колес, выполненных с возможностью зацепления с первыми косозубыми цилиндрическими зубчатыми колесами для совместного вращения и с выходным валом, имеющим зону с винтовой резьбой в его наружной поверхности у его внутреннего конца, для преобразования вращения вторых косозубых цилиндрических зубчатых колес в линейное перемещение выходного вала. Обеспечивается улучшенная работоспособность и более компактная конструкция. 2 н. и 10 з.п. ф-лы, 6 ил.
Комментарии