Роботизированная хирургическая система - RU2758753C1
Код документа: RU2758753C1
Чертежи
Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Для настоящей заявки испрашивается приоритет по китайской патентной заявке № 201810395743.1, «Surgical Robot System», поданной 27 апреля 2018 г. в Патентное ведомство Китая, содержание которой в полном объеме включено в настоящую заявку путем отсылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технической области медицинских устройств и, в частности, к роботизированной хирургической системе.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Минимально инвазивная хирургия с использованием роботизированной хирургической системы имеет преимущества меньшей травматичности, быстрого восстановления, меньшей раневой инфекции для пациента и снижения сложности проведения хирургической операции и уменьшения утомляемости для хирурга хирург. Одновременно, роботизированная хирургическая система гарантирует хирургу твердое ощущение эффекта погружения.
Когда хирург выполняет хирургическая операция, во-первых, требуется точно рассечь и ушить пораженную ткань; во-вторых, требуется инструмент для вытягивания ткани, которая будет удаляться или выворачиваться таким образом, чтобы ткань после разрезания была гладкой, с минимальным кровотечением и без видимого ожога, что способствует послеоперационному восстановлению пациента; и наконец, когда ткань требуется удалить или вывернуть, инструмент для вытягивания ткани требуется настраивать, чтобы вызывать требуемое тяговое усилие в соответствии с ходом операции.
Патентная публикация CN106028994A предлагает роботизированную хирургическую систему с четырьмя руками для хирургических операций, и четыре руки системы могут выполнять операцию растяжения только в фиксированном положении ткани. Поэтому, хирургический робот не может выполнять лечение пораженной ткани во время хирургической операции, так что поверхность разрезания ткани оказывается неровной, сильнее кровоточащей и заметными следами ожогов в процессе разрезания, что удлиняет процесс заживления раны и увеличивает время восстановления пациента и операционные затраты.
Патентная публикация CN107427327A относится к реконфигурируемой роботизированной хирургической системе с виртуальной траекторией и гибким эндоскопом. Когда пользователь перемещает одну роботизированную руку из роботизированных рук, другие роботизированные руки будут автоматически перемещаться для поддержки выравнивания виртуальной траектории. Это может обеспечить удобное управление роботизированными руками, что, однако, не способствует сглаживанию разреза ткани, уменьшению кровотечения или малозаметности следов ожогов в ходе хирургических операций.
Патентная публикация CN108472087A относится к системе и способу для хирургического инструмента с изменяемой скоростью в компьютеризированном медицинском устройстве. Компьютеризированное медицинское устройство выполнено с возможностью установки заданной величины скорости исполнительного механизма равной начальной скорости и контроля силы или крутящего момента, прилагаемой(ым) исполнительным механизмом. Когда прилагаемая(ый) сила или крутящий момент превышает предельную(ый) силу или крутящий момент, выполняется определение, удовлетворяется ли условие прерывания операции. Когда условие прерывания удовлетворяется, операция приостанавливается, и когда условие продолжения не удовлетворяется, выполняется определение, необходимо ли принудительное срабатывание исполнительного механизма. Система и способ не способствуют сглаживанию разреза ткани, уменьшению кровотечения или малозаметности следов ожогов в ходе хирургических операций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящая заявка предлагает роботизированную хирургическую систему, содержащую исполнительный терминал, при этом исполнительный терминал включает в себя первую инструментальную руку, снабженную первым хирургическим инструментом, вторую инструментальную руку, снабженную вторым хирургическим инструментом, приводное устройство, выполненное с возможностью приведения первой инструментальной руки, первого хирургического инструмента, второй инструментальной руки и второго хирургического инструмента в движение, и блок управления, соединенный с возможностью связи с приводным устройством, причем
первая инструментальная рука и первый хирургический инструмент выполнены с возможностью вытягивания тканей и органов;
вторая инструментальная рука и второй хирургический инструмент выполнены с возможностью выполнения хирургической операции на тканях и органах;
блок управления выполнен с возможностью получения величины силы в пространстве декартовых координат (в дальнейшем, декартовой силы), прилагаемой тканями и органами к первому хирургическому инструменту, и сравнения величины декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, с предварительно заданным значением силы; причем, если величина декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, меньше, чем the предварительно заданное значение силы, то блок управления управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданным значением силы, чтобы увеличить тяговое усилие, прилагаемое первым хирургическим инструментом к тканям и органам, до предварительно заданного значения силы.
В некоторых случаях, в роботизированной хирургической системе, если величина декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, меньше, чем предварительно заданное значение силы, то блок управления берет направление от предварительно заданной точки действия к точке действия декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, в качестве направления предварительно заданной силы и управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданной силой, чтобы увеличить тяговое усилие, прилагаемое первым хирургическим инструментом к тканям и органам, до предварительно заданного значения силы.
В некоторых случаях, в роботизированной хирургической системе, предварительно заданная точка действия находится в положении, в котором второй хирургический инструмент первоначально действует на ткани и органы, или
предварительно заданная точка действия находится в положении, в котором второй хирургический инструмент действует на ткани и органы, когда блок управления получает предварительно заданную точку действия.
В некоторых случаях, в роботизированной хирургической системе, исполнительный терминал дополнительно содержит третью инструментальную руку, снабженную третьим хирургическим инструментом; при этом третья инструментальная рука и третий хирургический инструмент выполнены с возможностью зажима тканей и органов, и предварительно заданная точка действия находится в положении, в котором третий хирургический инструмент действует на ткани и органы.
В некоторых случаях, в роботизированной хирургической системе, исполнительный терминал дополнительно содержит датчик силы, соединенный с возможностью связи с блоком управления, и датчик силы выполнен с возможностью измерения декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту.
В некоторых случаях, в роботизированной хирургической системе, когда второй хирургический инструмент начинает выполнять хирургическую операцию на тканях и органах, блок управления получает величину декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, и сравнивает предварительно заданное значение силы с величиной декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, или
блок управления получает величину декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, всегда, когда второй хирургический инструмент начинает выполнять хирургическую операцию на тканях и органах, причем блок управления сравнивает предварительно заданное значение силы с величиной декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту.
В некоторых случаях, в роботизированной хирургической системе,
блок управления также выполнен с возможностью получения величины декартовой силы, воспринимаемой вторым хирургическим инструментом, и сравнения величины декартовой силы, воспринимаемой вторым хирургическим инструментом, с пороговой силой; при этом, если величина декартовой силы, воспринимаемой вторым хирургическим инструментом, превышает пороговую силу, то блок управления определяет, что второй хирургический инструмент начинает выполнять хирургическую операцию на тканях и органах; или
блок управления также выполнен с возможностью получения величины декартовой силы, воспринимаемой вторым хирургическим инструментом, и сравнения разности между двумя полученными декартовыми силами, воспринятыми вторым хирургическим инструментом, с пороговой силой; причем, если разность между двумя полученными декартовыми силами, воспринятыми вторым хирургическим инструментом, превышает пороговую силу, то блок управления определяет, что второй хирургический инструмент начинает выполнять хирургическую операцию на тканях и органах.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно содержит первый датчик положения, соединенный с возможностью связи с блоком управления, и первый датчик положения выполнен с возможностью измерения положения первой инструментальной руки и/или положения первого хирургического инструмента,
блок управления выполнен с возможностью получения положения точки действия декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, в соответствии с положением первой инструментальной руки и/или положением первого хирургического инструмента.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно содержит первый датчик положения, соединенный с возможностью связи с блоком управления, и при этом первый датчик положения выполнен с возможностью измерения положения второй инструментальной руки и/или положения второго хирургического инструмента,
блок управления выполнен с возможностью получения положения, в котором второй хирургический инструмент действует на ткани и органы, в соответствии с положением второй инструментальной руки и/или положением второго хирургического инструмента.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно содержит третью инструментальную руку, снабженную третьим хирургическим инструментом; при этом третий хирургический инструмент и третья инструментальная рука выполнены с возможностью вытягивания тканей и органов,
предварительно заданная точка действия включает в себя первую предварительно заданную точку действия и вторую предварительно заданную точку действия;
блок управления выполнен с возможностью сравнения величины декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, с предварительно заданным значением силы; причем, если величина декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, меньше, чем предварительно заданное значение силы, то блок управления берет направление от первой предварительно заданной точки действия к точке действия декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, в качестве направления предварительно заданной силы, и управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданной силой, чтобы увеличить тяговое усилие, прилагаемое первым хирургическим инструментом к тканям и органам, до предварительно заданного значения силы;
блок управления выполнен с возможностью сравнения величины декартовой силы, прилагаемой тканями и органами к третьему хирургическому инструменту, с предварительно заданным значением силы; причем, если величина декартовой силы, прилагаемой тканями и органами к третьему хирургическому инструменту, меньше, чем предварительно заданное значение силы, то блок управления берет направление от второй предварительно заданной точки действия к точке действия декартовой силы, прилагаемой тканями и органами к третьему хирургическому инструменту, в качестве направления предварительно заданной силы, и управляет приводным устройством, чтобы приводить в движение третью инструментальную руку и третий хирургический инструмент в соответствии с предварительно заданной силой, чтобы увеличить тяговое усилие, прилагаемое третьим хирургическим инструментом к тканям и органам, до предварительно заданного значения силы;
первая предварительно заданная точка действия находится в положении, в котором третий хирургический инструмент действует на ткани и органы, и вторая предварительно заданная точка действия находится в положении, в котором первый хирургический инструмент действует на ткани и органы.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно содержит датчик крутящего момента, соединенный с возможностью связи с блоком управления; при этом первая инструментальная рука содержит множество шарниров первой инструментальной руки, и первый хирургический инструмент содержит множество шарниров первого хирургического инструмента; причем датчик крутящего момента располагается на каждом из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, чтобы измерять момент силы, воспринимаемый каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, возникающий в результате деформации в статическом состоянии;
блок управления дополнительно выполнен с возможностью получения из датчиков крутящего момента начального момента силы, воспринимаемого каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, когда определяется предварительно заданная сила;
блок управления дополнительно выполнен с возможностью получения из датчиков крутящего момента текущего момента силы, воспринимаемого каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, затем получения приращения момента силы, воспринимаемого каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, в соответствии с начальным моментом силы и полученным текущим моментом силы, чтобы дополнительно получить командный момент силы на каждом из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, и управления приводным устройством, чтобы приводить в движение шарнир первой инструментальной руки и шарнир первого хирургического инструмента в соответствии с командным моментом силы, чтобы увеличить тяговое усилие, прилагаемое третьим хирургическим инструментом к тканям и органам, до предварительно заданного значения силы.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно содержит второй датчик положения, соединенный с возможностью связи с блоком управления, и при этом второй датчик положения выполнен с возможностью измерения положения каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента;
блок управления выполнен с возможностью получения приращения положения каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента в соответствии с приращением момента силы, воспринимаемого каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, и управления жесткостью каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, и дополнительного получения заданного положения каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента в соответствии с текущим положением и полученным приращением положения каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, чтобы получить матрицу Якоби в заданном положении;
блок управления выполнен с возможностью получения тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам в заданном положении, в соответствии с матрицей Якоби и командным моментом силы на каждом из шарниров первой инструментальной руки и шарниров первого хирургического инструмента;
блок управления выполнен с возможностью сравнения величины тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам в заданном положении, с предварительно заданным значением силы; причем, если разность между величиной тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам в заданном положении, и предварительно заданным значением силы превышает допустимое значение, то блок управления корректирует приращение момента силы, воспринимаемого шарниром первой инструментальной руки и шарниром первого хирургического инструмента, таким образом, чтобы разность между величиной тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам в заданном положении, и предварительно заданным значением силы была меньше, чем допустимое значение.
В некоторых случаях, в роботизированной хирургической системе,
исполнительный терминал дополнительно включает в себя руку для визуализации, снабженную эндоскопом, и предварительно заданное значение силы определяется с использованием эндоскопа для наблюдения состояния растянутых тканей и органов.
В некоторых случаях, в роботизированной хирургической системе, роботизированная хирургическая система дополнительно содержит a терминал управления, при этом терминал управления содержит задающий манипулятор, выполненный с возможностью управления перемещением первой инструментальной руки и первого хирургического инструмента и восприятия декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту; и причем предварительно заданное значение силы определяется на основании декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, когда ткани и органы натягиваются.
В роботизированной хирургической системе, предложенной в настоящей заявке, первая инструментальная рука и первый хирургический инструмент выполнены с возможностью вытягивания тканей и органов, вторая инструментальная рука и второй хирургический инструмент выполнены с возможностью выполнения хирургической операции на тканях и органах, блок управления выполнен с возможностью получения величины декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, и сравнения величины декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, с предварительно заданным значением силы; при этом, если декартова сила, прилагаемая тканями и органами к первому хирургическому инструменту меньше, чем предварительно заданное значение силы, то блок управления управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданным значением силы, чтобы увеличить тяговое усилие, прилагаемое первым хирургическим инструментом к тканям и органам, до предварительно заданного значения силы. В результате, обеспечивается функция автономного вытягивания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
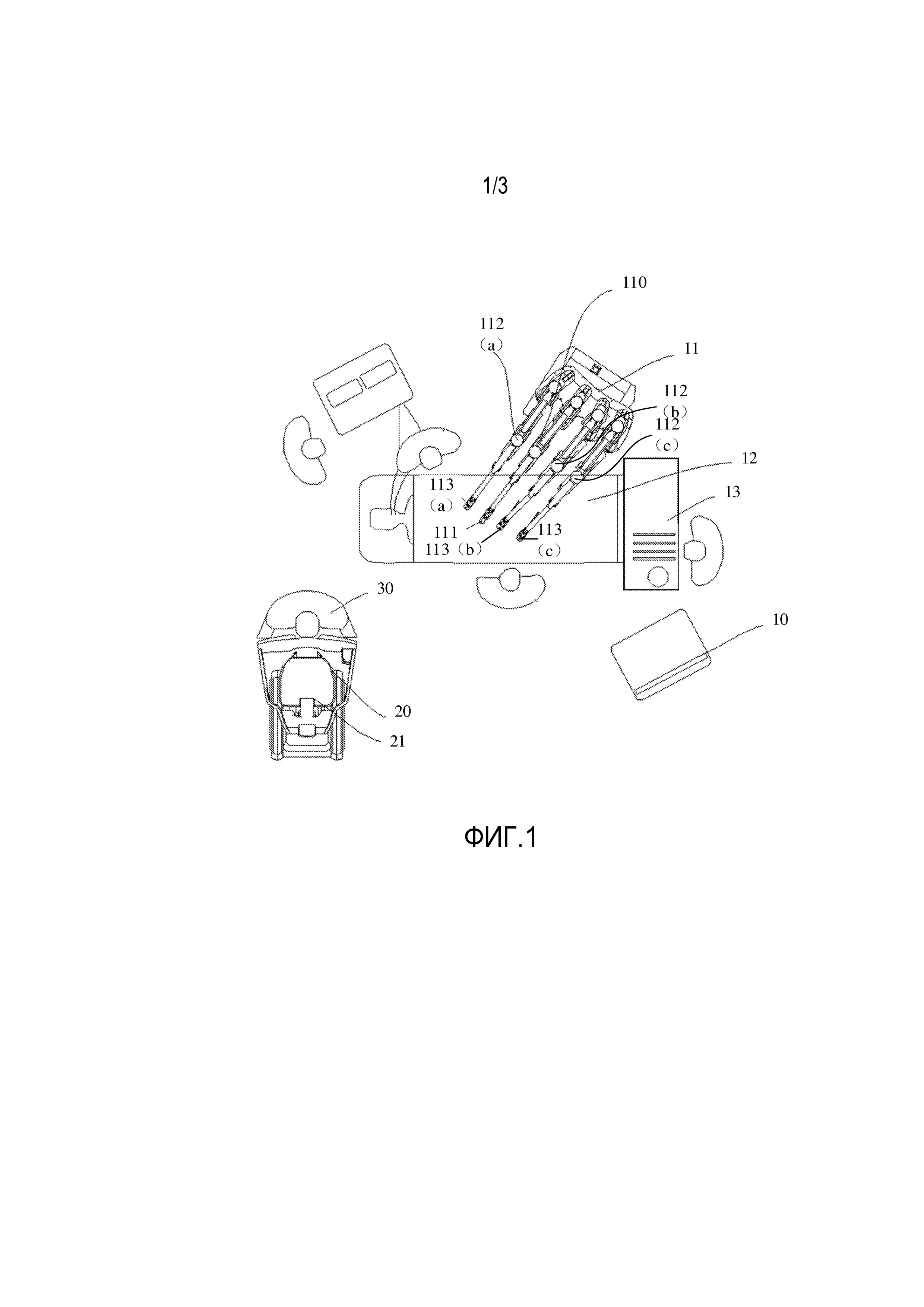
Фиг. 1 - схематическое изображение конструкции роботизированной хирургической системы в соответствии с вариантом осуществления настоящего изобретения;
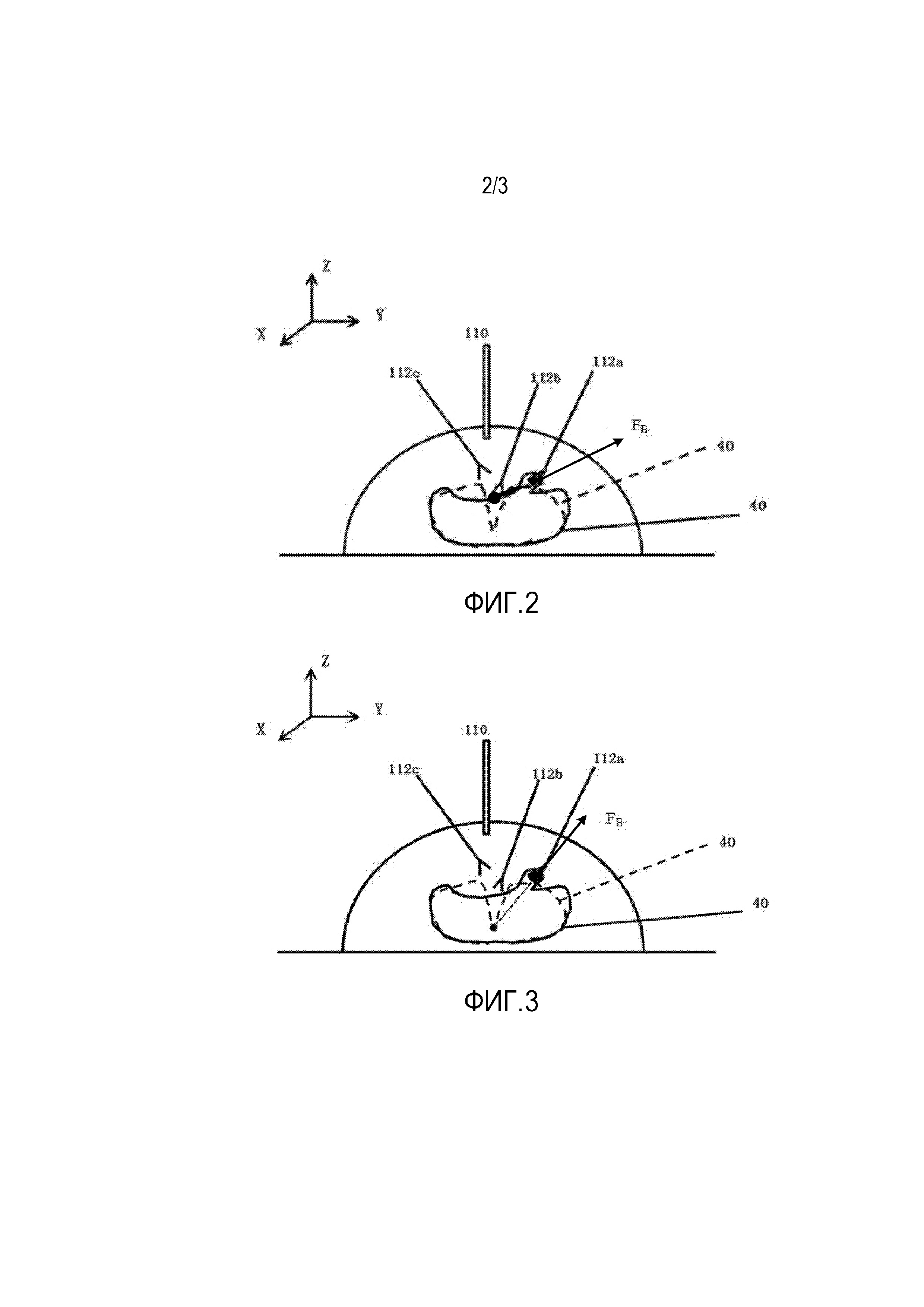
Фиг. 2 - схематическое изображение силы, развиваемой в ходе операции вытягивания, выполняемой одной инструментальной рукой и ее хирургическим инструментом, в соответствии с вариантом осуществления настоящего изобретения;
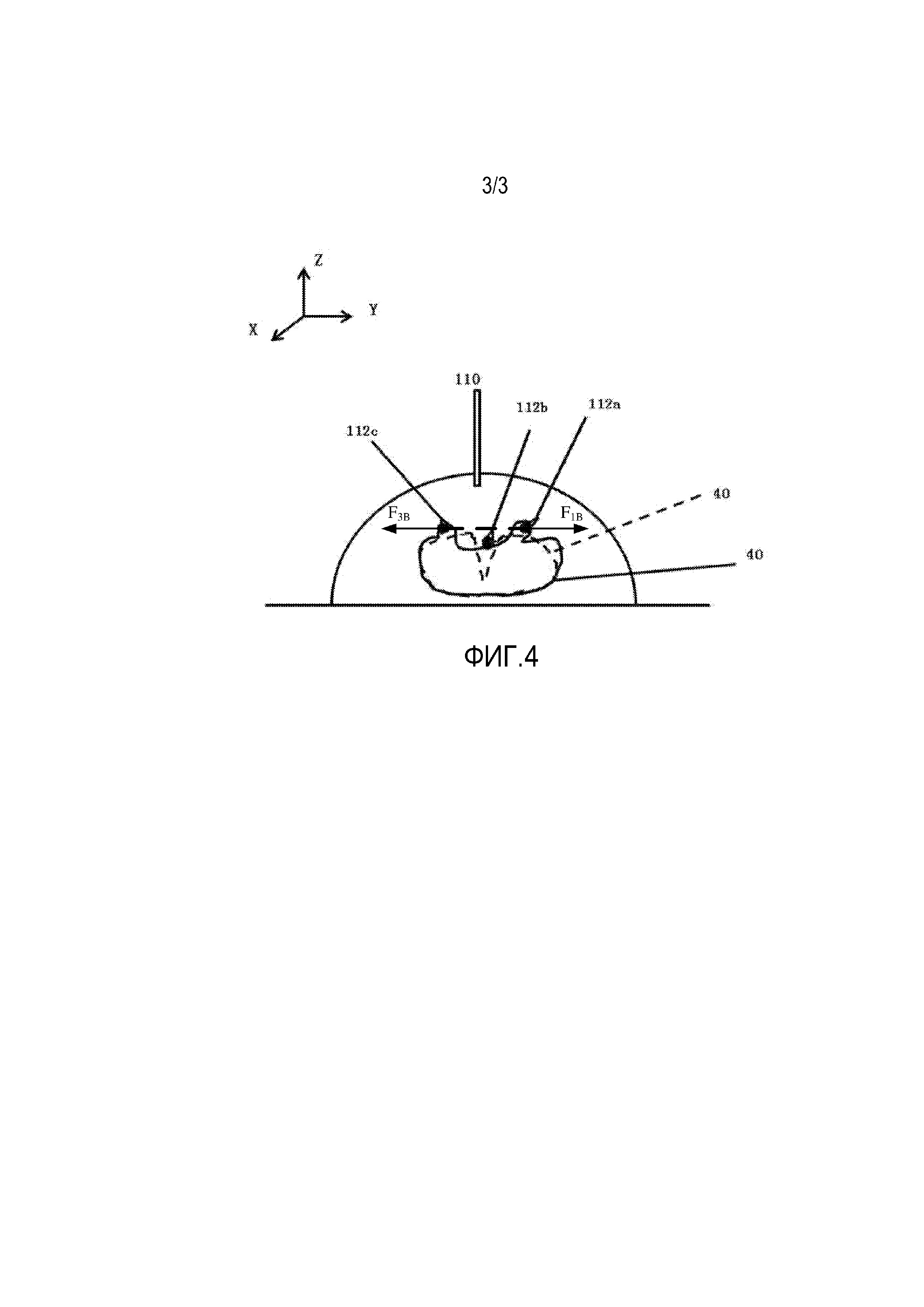
Фиг. 3 - схематическое изображение силы, развиваемой в ходе операции вытягивания, выполняемой одной инструментальной рукой и ее хирургическим инструментом, в соответствии с другим вариантом осуществления настоящего изобретения;
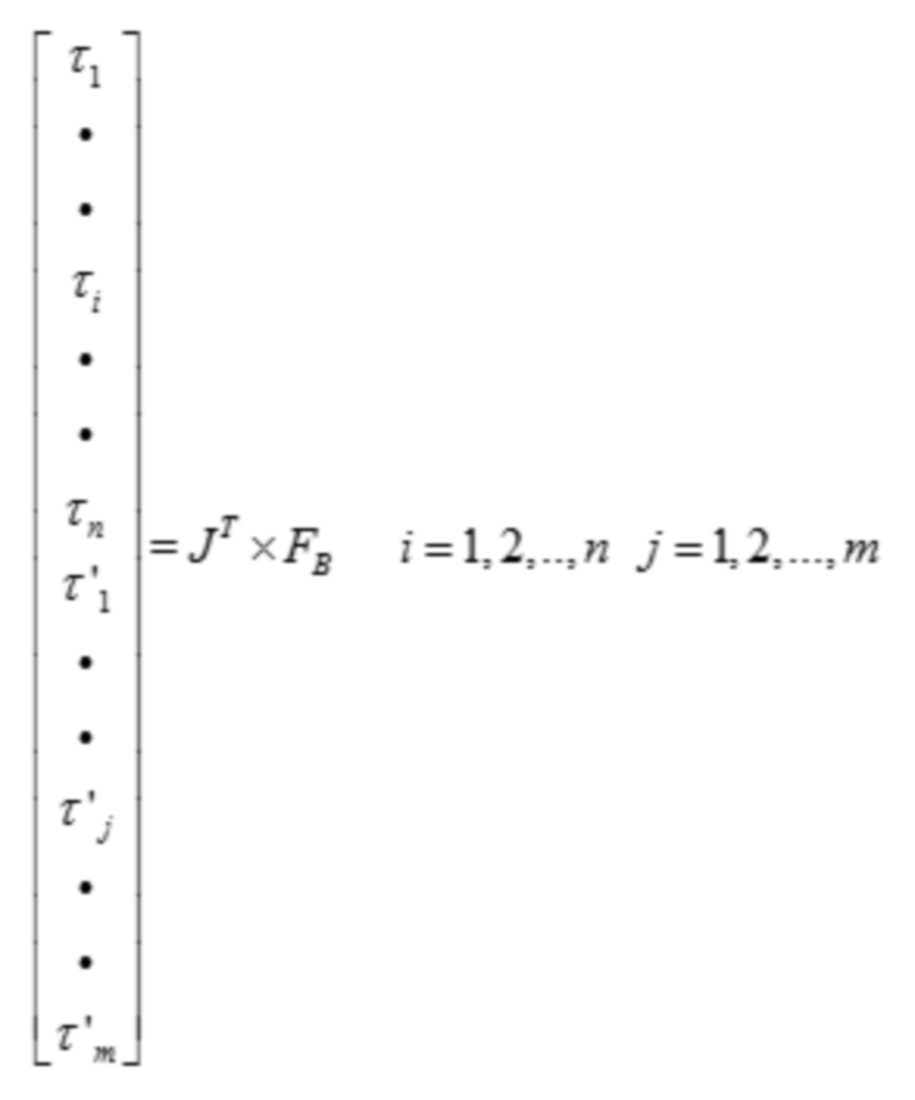
Фиг. 4 - схематическое изображение сил, развиваемых в ходе операции вытягивания, выполняемой двумя инструментальными руками и их хирургическими инструментами, в соответствии с вариантом осуществления настоящего изобретения.
На чертежах:
10 - передвижная стойка для видеоаппаратуры; 11 - прикроватная передвижная стойка; 12 - хирургическая каталка; 13 - инструментальная передвижная стойка; 20 - консоль хирурга; 21 - устройство отображения; 30 - хирург; 40 - ткани и органы человека; 110 - рука для визуализации; 111 - эндоскоп; 112 - инструментальные руки; 112a - первая инструментальная рука; 112b - вторая инструментальная рука; 112c - третья инструментальная рука; 113 - хирургические инструменты; 113a - первый хирургический инструмент; 113b - второй хирургический инструмент; 113c - третий хирургический инструмент.
ПОДРОБНОЕ ОПИСАНИЕ
Роботизированная хирургическая система, предложенная в настоящем изобретении, подробно описана в дальнейшем со ссылкой на конкретные варианты осуществления и прилагаемые чертежи. Признаки и преимущества изобретения будут более понятными из нижеследующего подробного описания и прилагаемой формулы изобретения. Следует отметить, что фигуры являются значительно упрощенными и могут быть начерчены не в масштабе, и их единственная цель заключается в содействии простому и ясному объяснению некоторых вариантов осуществления изобретения. Кроме того, конструкция, показанная на чертежах, является в большинстве случаев частью реальной конструкции. В частности, назначение каждого чертежа отличается, и иногда используются разные масштабы.
Настоящая заявка предлагает роботизированную хирургическую систему. Роботизированная хирургическая система включает в себя исполнительный терминал, включающий в себя первую инструментальную руку, оснащенную первым хирургическим инструментом, вторую инструментальную руку оснащенную вторым хирургическим инструментом, приводное устройство для приведения первой инструментальной руки, первого хирургического инструмента, второй инструментальной руки и второго хирургического инструмента в движение, и блок управления, соединенный с возможностью связи с приводным устройством. Первая инструментальная рука и первый хирургический инструмент предназначены для вытягивания тканей и органов человека. Вторая инструментальная рука и второй хирургический инструмент выполнены с возможностью выполнения хирургических операций на тканях и органах человека. Блок управления выполнен с возможностью получения величины декартовой силы, прилагаемой тканями и органами человека к первому хирургическому инструменту, и сравнения величины декартовой силы, прилагаемой тканями и органами человека к первому хирургическому инструменту, и предварительно заданного значения силы. Если величина декартовой силы, прилагаемой тканями и органами человека к первому хирургическому инструменту, меньше, чем предварительно заданное значение силы, то блок управления управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданным значением силы, таким образом, чтобы величина тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам человека, достигала предварительно заданного значения.
ВАРИАНТ 1 ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является схематическим изображением конструкции роботизированной хирургической системы в соответствии с вариантом осуществления. В варианте осуществления, показанном на фиг. 1, роботизированная хирургическая система включает в себя исполнительный терминал и терминал управления. Исполнительный терминал может включать в себя передвижную стойку 10 для видеоаппаратуры, прикроватную передвижную стойку 11, хирургическую каталку 12 и инструментальную передвижную стойку 13. Терминал управления включает в себя консоль 20 хирурга. Роботизированная хирургическая система применяется, в основном, для выполнения минимально инвазивного хирургического лечения пациентов на хирургической каталке 12.
В данном варианте осуществления, прикроватная передвижная стойка 11 включает в себя, по меньшей мере, одну руку 110 для визуализации, оснащенную эндоскопом 111, например, 3-мерным лапароскопом. Эндоскоп 111 выполнен с возможностью получения информации о тканях и органах человека, хирургических инструментах и операционном окружении.
В данном варианте осуществления, прикроватная передвижная стойка 11 дополнительно включает в себя три инструментальные руки 112, которые обозначены как первая инструментальная рука 112a, вторая инструментальная рука 112b и третья инструментальная рука 112c. Каждая инструментальная рука 112 соответственно оснащена хирургическим инструментом 113. Иначе говоря, первая инструментальная рука 112a оснащена первым хирургическим инструментом 113a, вторая инструментальная рука 112b оснащена вторым хирургическим инструментом 113b, и третья инструментальная рука 112c оснащена третьим хирургическим инструментом 113c. Эндоскоп 111 и хирургический инструмент 113 входят внутрь тела пациента и подходят к положению поражения через раневой канал в теле пациента.
Как также следует из фиг. 1, в варианте осуществления настоящего изобретения, консоль 20 хирурга включает в себя задающий манипулятор (не показанный на фигуре). Между задающим манипулятором и инструментальной рукой 112 и хирургическим инструментом 113 на исполнительном терминале сформирована взаимосвязь копирующего управления. В частности, инструментальная рука 112 и хирургический инструмент 113 перемещаются в соответствии с перемещением главного манипулятора в процессе операции, то есть, перемещаются в соответствии с работой руки хирурга. Кроме того, главный манипулятор принимает также информацию о силе, прилагаемой тканями и органами человека к хирургическому инструменту, и передает ее обратно на руку хирурга, и поэтому хирург может интуитивно ощущать проведение хирургической операции. Консоль 20 хирурга включает в себя также устройство 21 отображения. Хирург 30 может наблюдать внутреннее окружение в пациенте и перемещение конца хирургического инструмента 113 с помощью устройства 21 отображения (которое может быть двумерным дисплеем или трехмерным дисплеем) на консоли 20 хирурга.
В данном варианте осуществления, первая инструментальная рука 112a и первый хирургический инструмент 113a выполнены с возможностью вытягивания тканей и органов человека; вторая инструментальная рука 112b и второй хирургический инструмент 113b выполнены с возможностью выполнения хирургических операций (включая разрезание, ушивание, отслаивание и т.п. тканей); и третья инструментальная рука 112c и третий хирургический инструмент 113c выполнены с возможностью зажима тканей и органов человека. Специалистам в данной области техники должно быть понятно, что первая инструментальная рука 112a и первый хирургический инструмент 113a, третья инструментальная рука 112c и третий хирургический инструмент 113c также могут быть выполнены с возможностью выполнения хирургических операций (включая разрезание, ушивание, отслаивание и т.п. тканей); вторая инструментальная рука 112b и второй хирургический инструмент 113b также могут быть выполнены с возможностью вытягивания или зажима тканей и органов человека; и третья инструментальная рука 112c и третий хирургический инструмент 113c также могут быть выполнены с возможностью вытягивания тканей и органов человека. В других вариантах осуществления настоящего изобретения, прикроватная передвижная стойка 11 может также включать в себя только две инструментальных руки 112 или большее число инструментальных рук 112, например, четыре инструментальные руки 112 или пять инструментальных рук 112.
В данном варианте осуществления, вторая инструментальная рука 112b и второй хирургический инструмент 113b могут выполнять операции разрезания тканей и органов человека 40, и первая инструментальная рука 112a и первый хирургический инструмент 113a предназначены для вытягивания тканей и органов человека. Благодаря наличию первой инструментальной руки 112a и первого хирургического инструмента 113a упрощается создание поверхностного натяжения и внутреннего натяжения в тканях и органах 40 человека, как показано штриховой линией на фиг. 2. В процессе хирургической операции, поверхностное натяжение обеспечивает, так называемое, «состояние направленного наружу натяжения» тканей в точке действия, выполняемого вторым хирургическим инструментом 113b, внутреннее натяжение обеспечивает, так называемое, «состояние непрерывного натяжения» тканей во время разрезания ткани. Однако, по мере того, как процесс разрезания продолжается, точка действия, выполняемого на тканях и органах 40 человека вторым хирургическим инструментом 113b, будет соответственно изменять свое положение, и декартова сила, прилагаемая тканями и органами 40 человека к первому хирургическому инструменту 113a, также будет изменяться. Если первую инструментальную руку 112a и первый хирургический инструмент 113a не корректировать, то величина тягового усилия, прилагаемого первым хирургическим инструментом 113a к тканям и органам 40 человека будет меньше, чем предварительно заданное значение силы, что приведет к тому, что ткани и органы 40 человека не будут натягиваться.
В варианте осуществления настоящего изобретения, блок управления выполнен с возможностью приема информации о декартовой силе, воспринимаемой первым хирургическим инструментом 113a, и определяет, следует ли первую инструментальную руку 112a и первый хирургический инструмент 113a скорректировать в соответствии с предварительно заданным значением силы, и управляет тяговым усилием, прилагаемым первым хирургическим инструментом 113a к тканям и органам 40 человека, с целью достижения предварительно заданного значения силы. В результате, ткани и органы 40 человека всегда натягиваются, и обеспечивается функция автономного вытягивания для роботизированной хирургической системы.
В частности, в варианте осуществления настоящего изобретения, исполнительный терминал дополнительно включает в себя датчик силы (не показанный на фигурах), соединенный с возможностью связи с блоком управления, и датчик силы выполнен с возможностью измерения декартовой силы прилагаемой тканями и органами 40 человека к первому хирургическому инструменту 113a. Настоящий вариант осуществления не ограничивает конкретно местоположение датчика силы. Например, датчик силы обеспечивается на конце первого хирургического инструмента 113a.
Блок управления выполнен с возможностью сравнения величины декартовой силы, полученной из датчика силы, с предварительно заданным значением силы, и если предварительно заданное значение силы превосходит декартову силу, то это указывает, что ткани и органы 40 человека являются недостаточно натянутыми, и тогда блок управления может использовать направление от предварительно заданной точки действия к точке действия декартовой силы, прилагаемой тканями и органами 40 человека к первому хирургическому инструменту 113a, в качестве направления предварительно заданной силы и управлять приводным устройством в соответствии с предварительно заданным значением силы и предварительно заданным направлением, чтобы приводить в движение первую инструментальную руку 112a и первый хирургический инструмент 113a таким образом, чтобы тяговое усилие, прилагаемое первым хирургическим инструментом 113a к тканям и органам 40 человека, достигло предварительно заданного значения силы. Иначе говоря, ткани и органы 40 человека снова натягиваются из состояния, в котором ткани и органы 40 человека являются недостаточно натянутыми, что обеспечивает функцию автономного вытягивания.
В данном варианте осуществления не существует никакого специального ограничения на способы обеспечения повышения тягового усилия, прилагаемого первым хирургическим инструментом 113a к тканям и органам 40 человека, чтобы достигнуть предварительно заданной силы, создаваемой первой инструментальной рукой 112a и первым хирургическим инструментом 113a, которые приводятся в движение приводным устройством под управлением блока управления. Например, первая инструментальная рука 112a включает в себя n шарниров первой инструментальной руки (не показанных на фигурах), и приводное устройство действует на каждый из n шарниров первой инструментальной руки. Первый хирургический инструмент 113a включает в себя m шарниров первого хирургического инструмента (не показанных на фигурах), и приводное устройство действует также на каждый из m шарниров первого хирургического инструмента. В соответствии с нижеприведенной формулой, блок управления вычисляет момент силы, воспринимаемый каждым из шарниров первой инструментальной руки и шарниров первого хирургического инструмента, (т.е. требуемый момент силы, прилагаемой приводным устройством для приведения в движение каждого из шарниров первой инструментальной руки и шарниров первого хирургического инструмента) в соответствии с расчетной декартовой силой (значение которой равно предварительно заданной силе, но имеет направление, противоположное направлению предварительно заданной силы), прилагаемой тканями и органами 40 человека к первому хирургическому инструменту 113a:
где означает расчетную декартову силу, прилагаемую тканями и органами 40 человека к первому хирургическому инструменту 113a, означает число шарниров первой инструментальной руки на первой инструментальной руке 112a, означает момент силы, воспринимаемый i-тым шарниром первой инструментальной на первой инструментальной руке 112a, означает число шарниров первого хирургического инструмента на первом хирургическом инструменте 113a, означает момент силы, воспринимаемый j-тым шарниром первого хирургического инструмента на первом хирургическом инструменте 113a, J означает кинематическую матрицу Якоби текущих положений первой инструментальной руки 112a и первого хирургического инструмента 113a, то есть, матрицу частных производных положения в пространстве декартовых координат относительно угла в шарнире рабочего органа хирургического инструмента.
В других вариантах осуществления настоящего изобретения, концы второго хирургического инструмента 113b и третьего хирургического инструмента 113c также могут быть снабжены датчиками силы, чтобы измерять декартову силу, прилагаемую тканями и органами 40 человека к соответствующим хирургическим инструментам, когда второй хирургический инструмент 113b и третий хирургический инструмент 113c выполнены с возможностью вытягивания тканей и органов 40 человека.
Кроме того, когда второй хирургический инструмент 113b начинает выполнять хирургическую операцию на тканях и органах 40 человека, блок управления принимает информацию о декартовой силе, воспринимаемой первым хирургическим инструментом 113a, и сравнивает декартову силу, воспринимаемую первым хирургическим инструментом 113a, с предварительно заданным значением силы. В другом случае, блок управления всегда принимает информацию о декартовой силе, воспринимаемой первым хирургическим инструментом 113a. Когда вторая инструментальная рука 112b начинает выполнять хирургическую операцию на тканях и органах 40 человека, блок управления сравнивает декартову силу, воспринимаемую первым хирургическим инструментом 113a, с предварительно заданным значением силы. Варианты осуществления настоящего изобретения не ограничивают способы определения, начинает ли или нет второй хирургический инструмент 113b выполнять хирургическую операцию на тканях и органах 40 человека. Например, конец второго хирургического инструмента 113b снабжен датчиком силы, соединенным с возможностью связи с блоком управления, и блок управления выполнен с возможностью получения информации о декартовой силе, воспринимаемой вторым хирургическим инструментом 113b, в соответствии с результатами измерения датчика силы. Если декартова сила, воспринимаемая вторым хирургическим инструментом 113b, превышает предварительно заданную пороговую силу, то определяется, что второй хирургический инструмент 113b начинает выполнять хирургическую операцию на тканях и органах 40 человека. В другом примере, блок управления дважды получает информацию о декартовой силе, воспринимаемой вторым хирургическим инструментом 113b, и сравнивает разность между декартовыми силами, воспринимаемыми вторым хирургическим инструментом 113b, с пороговой силой. Если разность между декартовыми силами, воспринимаемыми вторым хирургическим инструментом 113b, превышает пороговую силу, то определяется, что второй хирургический инструмент 113b начинает выполнять хирургическую операцию на тканях и органах человека.
Как показано на фиг. 1 и 2, в варианте осуществления настоящего изобретения, предварительно заданная точка действия является точкой действия, первоначально выполняемого вторым хирургическим инструментом 113b на тканях и органах 40 человека. Настоящая заявка не ограничивает способы получения положения точки действия, первоначально выполняемого вторым хирургическим инструментом 113b на тканях и органах 40 человека, а также положения точки действия декартовой силы, прилагаемой тканями и органами 40 человека к первому хирургическому инструменту 113a. Например, исполнительный терминал дополнительно включает в себя первый датчик положения, соединенный с возможностью связи с блоком управления, и первый датчик положения выполнен с возможностью измерения положения первой инструментальной руки 112a и/или положения первого хирургического инструмента 113a. В предпочтительном варианте, первый датчик положения включает в себя оптическую прицельную линзу, которая помещается на инструментальной руке, при этом положение и угол Эйлера оптической прицельной линзы измеряются оптическим следящим устройством, и получают положение и постанов оптической прицельной линзы в базовой системе координат. В соответствии с положением и постановом хирургического инструмента в системе координат оптической прицельной линзы получают положение и постанов хирургического инструмента в базовой системе координат. Для получения более подробной информации можно обратиться к патентной публикации CN 105232155A, содержание которой в полном объеме включено в настоящую заявку путем отсылки. В другом примере, первый датчик положения включает в себя датчик угла наклона, и датчик угла наклона выполнен с возможностью измерения положений шарниров первой инструментальной руки 112a, второй инструментальной руки 112b, первого хирургического инструмента 113a и второго хирургического инструмента 113b. Положение точек действия (выполняемых концами первого хирургического инструмента и второго хирургического инструмента) в пространстве декартовых координат (т.е. базовая система координат) рассчитывается методами прямой кинематики (например, методом DH (Денавита-Хартенберга)). Штриховые линии на фиг. 2 показывают текущее состояние тканей и органов 40 человека, и сплошные линии показывают начальное состояние тканей и органов 40 человека. Как показано на фиг. 3, положение предварительно заданной точки действия можно также определить на основании текущего положения точки действия, выполняемого вторым хирургическим инструментом 113b на тканях и органах 40 человека, (т.е. текущего положения конца второго хирургического инструмента 113b). Определение «текущее» относится здесь к моменту времени, когда блок управления получает предварительно заданную точку действия. В данный момент времени, направление предварительно заданной силы задается из текущего положения, в котором второй хирургический инструмент 113b выполняет хирургическую операцию на тканях и органах 40 человека, к положению, в которое первый хирургический инструмент 113a вытягивает ткани и органы 40 человека. Если исполнительный терминал включает в себя также третью инструментальную руку 112c и третий хирургический инструмент 113c, которые предназначены для зажима тканей и органов человека, при этом предварительно заданная точка действия может быть также точкой действия, выполняемого третьим хирургическим инструментом 113c на тканях и органах человека.
В данном варианте осуществления, предварительно заданное значение силы определяется с использованием эндоскопа 111 для наблюдения состояния вытянутых тканей и органов человека. До или во время хирургической операции, в случае, когда функция автономного вытягивания роботизированной хирургической системы не активирована, хирург вытягивает ткани и органы 40 человека посредством инструментальной руки и хирургических инструментов и определяет предварительно заданное значение силы путем наблюдения состояния натяжения вытянутых тканей и органов человека. В другом случае, предварительно заданное значение силы может быть также эмпирическим значением, получаемым хирургом исчерпывающим образом в соответствии с несколькими хирургическими факторами, например, типом операции, типом тканей и органов и полом и возрастом пациента.
Кроме того, консоль хирурга 20 включает в себя также блокировочный переключатель для автономного вытягивания, чтобы блок управления мог получать сведения о включении и выключении функции автономного вытягивания роботизированной системы. До того, как определяется предварительно заданное значение силы, консоль 20 хирурга может известить блок управления, что следует выключить функцию автономного вытягивания роботизированной системы посредством блокировочного переключателя, и поэтому блок управления не получает информации о декартовой силе, воспринимаемой первым хирургическим инструментом 113a, или блок управления получает информацию о декартовой силе, воспринимаемой первым хирургическим инструментом 113a, но не сравнивает декартову силу, воспринимаемую первым хирургическим инструментом 113a, с предварительно заданной силой, или блок управления сравнивает декартову силу, воспринимаемую первым хирургическим инструментом 113a, с предварительно заданной силой, но не управляет приводным устройством для приведения в движение. После того, как предварительно заданное значение силы определяется, консоль 20 хирурга может, при посредстве блокировочного переключателя, известить блок управления, что следует активировать функцию автономного вытягивания роботизированной системы, чтобы величина тягового усилия, прилагаемого первым хирургическим инструментом 113a к тканям и органам человека, достигла предварительно заданного значения силы.
Поэтому, в данном варианте осуществления, блок управления получает информацию о декартовой силе, воспринимаемой первым хирургическим инструментом 113a, и ткани и органы человека гарантировано подвергаются нормальному и постоянному натяжению, и гарантируется устойчивость натяжения пораженной ткани. Хирургическая операция, выполняемая вторым хирургическим инструментом 113b, может быть выполнена небольшим операционным движением, и поэтому разрез является гладким и менее кровоточащим. Хирургическая операция выполняется просто, в частности, на тканях и органах с большой толщиной, например, почках.
ВАРИАНТ 2 ОСУЩЕСТВЛЕНИЯ
Как показано на фиг. 1 и 4, в отличие от вышеописанного варианта осуществления, третья инструментальная рука 112c и третий хирургический инструмент 113c в данном варианте осуществления также выполнены с возможностью вытягивания тканей и органов 40 человека, и блок управления выполнен с возможностью сравнения величины декартовой силы, прилагаемой тканями и органами 40 человека к третьему хирургическому инструменту 113c, с предварительно заданным значением силы. Если предварительно заданное значение силы превышает величину декартовой силы, прилагаемой тканями и органами 40 человека к третьему хирургическому инструменту 113c, то блок управления использует направление от предварительно заданной точки действия к точке действия декартовой силы, прилагаемой тканями и органами 40 человека к третьему хирургическому инструменту 113c, в качестве предварительно заданного направления силы, и управляет приводным устройством, чтобы приводить в движение шарниры третьей инструментальной руки 112c и третьего хирургического инструмента 113c в соответствии с предварительно заданным значением силы и предварительно заданным направлением силы, чтобы величина тягового усилия, прилагаемого третьим хирургическим инструментом 113c к тканям и органам 40 человека, достигало предварительно заданного значения силы.
В случае, когда две инструментальные руки и два хирургических инструмента выполнены с возможностью вытягивания тканей и органов 40 человека, первый хирургический инструмент 113a и третий хирургический инструмент 113c могут быть оснащены датчиком силы, соответственно, на их концах, чтобы измерять декартовы силы, прилагаемые тканями и органами 40 человека к первому хирургическому инструменту 113a и третьему хирургическому инструменту 113c, соответственно. В результате, могут быть получены тяговые усилия, прилагаемые, соответственно, первым хирургическим инструментом 113a и третьим хирургическим инструментом 113c к тканям и органам 40 человека.
Затем блок управления сравнивает декартовы силы, прилагаемые тканями и органами 40 человека к первому хирургическому инструменту 113a и третьему хирургическому инструменту 113c, с предварительно заданным значением силы, соответственно. Если предварительно заданное значение силы является выше, то блок управления управляет приводным устройством, чтобы приводить в движение первую инструментальную руку 112a, первый хирургический инструмент 113a, третью инструментальную руку 112c и третий хирургический инструмент 113c, чтобы величина тягового усилия, прилагаемого первым хирургическим инструментом 113a к тканям и органам человека 40, и величина тягового усилия, прилагаемого третьим хирургическим инструментом 113c к тканям и органам 40 человека, достигла предварительно заданного значения силы.
В данном варианте осуществления, предварительно заданное значение силы может определяться ощущением хирургом силы, прикладываемой к хирургу задающим манипулятором. Иначе говоря, до или во время хирургической операции, хирургическая система находится в состоянии вытягивания, и хирург применяет хирургические инструменты, чтобы вытягивать ткани и органы 40 человека таким образом, что вытянутые ткани и органы 40 человека являются натянутыми. При этом, задающий манипулятор воспринимает декартовы силы, прилагаемые тканями и органами 40 человека к хирургическим инструментам, и передает их обратно на хирурга. Хирург определяет предварительно заданное значение силы в соответствии с обратно действующей силой.
Если декартова сила, прилагаемая тканями или органами к хирургическим инструментам, имеет значение меньше, чем предварительно заданное значение силы, то это означает, что ткани и органы 40 человека не натянуты, и блок управления должен приводить в движение первую инструментальную руку 112a, первый хирургический инструмент 113a, третью инструментальную руку 112c и третий хирургический инструмент 113c, чтобы скорректировать силу, прилагаемую первым хирургическим инструментом 113a и третьим хирургическим инструментом 113c к тканям и органам 40 человека. Как показано на фиг. 4, в данном варианте осуществления, для первой инструментальной руки 112a и первого хирургического инструмента 113a, положение предварительно заданной точки действия определяется в соответствии с положением конца третьего хирургического инструмента 113c, смонтированного на третьей инструментальной руке 112c, то есть, направление предварительно заданной силы F1B задается от точки действия, в которой третий хирургический инструмент 113c вытягивает ткани и органы 40 человека, к точке действия, в которой первый хирургический инструмент 113a вытягивает ткани и органы 40 человека. Для третьей инструментальной руки 112c и третьего хирургического инструмента 113c, положение предварительно заданной точки действия определяется в соответствии с положением конца первого хирургического инструмента 113a, смонтированного на первой инструментальной руке 112a, то есть, направление предварительно заданной силы F3B задается от точки действия, в которой первый хирургический инструмент 113a вытягивает ткани и органы 40 человека, к точке действия, в которой третий хирургический инструмент 113c вытягивает ткани и органы 40 человека. В данном случае, предварительно заданная точка действия включает в себя первую предварительно заданную точку действия и вторую предварительно заданную точку действия. Первая предварительно заданная точка действия находится в точке, в которой третий хирургический инструмент 113c действует на ткани и органы человека, и вторая предварительно заданная точка действия находится в точке, в которой первый хирургический инструмент 113a действует на ткани и органы человека. Штриховые линии на фиг. 4 показывают текущее состояние тканей и органов 40 человека, и сплошные линии показывают начальное состояние тканей и органов 40 человека. Подобно вышеописанному варианту осуществления, не существует никакого специального ограничения на способы получения положения точки действия, в которой третий хирургический инструмент 113c вытягивает ткани и органы 40 человека, и положение точки действия, в которой первый хирургический инструмент 113a вытягивает ткани и органы 40 человека. Положение точки действия (выполняемого концами первого хирургического инструмента и третьего хирургического инструмента) в пространстве декартовых координат (т.е. базовой системы координат) может быть вычислено методами прямой кинематики (например, методом DH). На основании положений, измеренных датчиком угла наклона, шарниров первой инструментальной руки 112a, первого хирургического инструмента 113a, третьей инструментальной руки 112c и третьего хирургического инструмента 113c.
После того, как получены направления предварительно заданных сил для первого хирургического инструмента 113a и третьего хирургического инструмента 113c, блок управления получает момент силы, требуемый от приводного устройства для приведения в движение каждого из шарниров в соответствии с предварительно заданными значениями сил, направления предварительно заданных сил и вышеупомянутой матрицы Якоби, и управляет приводным устройством, чтобы приводить в движение шарнир первой инструментальной руки, первый хирургический инструмент, шарнир третьей инструментальной руки и третий хирургический инструмент таким образом, чтобы величины тяговых усилий, соответственно, прилагаемых первым хирургическим инструментом 113a и третьим хирургическим инструментом 113c к тканям и органам 40 человека достигли предварительно заданных значений сил. Иначе говоря, ткани и органы 40 человека снова натягиваются из ненатянутого состояния, чтобы обеспечивалась функция автономного вытягивания.
В данном варианте осуществления, первая инструментальная рука 112a и первый хирургический инструмент 113a выполнены с возможностью вытягивания тканей и органов человека, и вторая инструментальная рука 112b и второй хирургический инструмент 113b выполнены с возможностью выполнения хирургических операций (включая разрезание, ушивание, отслаивание и т.п. тканей), третья инструментальная рука 112c и третий хирургический инструмент 113c также выполнены с возможностью вытягивания тканей и органов 40 человека. Специалисты в данной области техники должны понимать, что первая инструментальная рука 112a и первый хирургический инструмент 113a также могут быть выполнены с возможностью выполнения хирургических операций (включая разрезание, ушивание, отслаивание и т.п. тканей), тогда как другие две инструментальные руки и два хирургических инструмента выполнены с возможностью вытягивания тканей и органов человека. В качестве альтернативы, третья инструментальная рука 112c и третий хирургический инструмент 113c также могут быть выполнены с возможностью выполнения хирургических операций (включая разрезание, ушивание, отслаивание и т.п. тканей), тогда как другие две инструментальные руки и два хирургических инструмента выполнены с возможностью вытягивания тканей и органов человека. Прикроватная передвижная стойка 11 может также включать в себя большее число инструментальных рук 112 и хирургических инструментов 113, смонтированных на них, например, четыре инструментальные руки 112 или пять инструментальных рук 112.
ВАРИАНТ 3 ОСУЩЕСТВЛЕНИЯ
В отличие от первого варианта осуществления, исполнительный терминал в данном варианте осуществления включает в себя множество датчиков крутящего момента и второй датчик положения, которые соединены с возможностью связи с блоком управления. Первая инструментальная рука 112a включает в себя n шарниры первой инструментальной руки (не показанных на фигурах). Первый хирургический инструмент включает в себя m шарниров первого хирургического инструмента (не показанных на фигурах). Датчик крутящего момента выполнен с возможностью измерения момента силы, воспринимаемого каждым из шарниров первого хирургического инструмента и шарниров первой инструментальной руки на первой инструментальной руке 112a, который создается вследствие деформации в статическом состоянии. Второй датчик положения выполнен с возможностью измерения положения каждого шарнира первой инструментальной руки и положения каждого шарнира первого хирургического инструмента.
Когда хирург определяет, что ткани натянуты правильно, соответственно определяется предварительно заданная сила , и каждый из шарниров (шарнир первой инструментальной руки и шарнир первого хирургического инструмента упоминаются в настоящем описании просто с целью упрощения описания, так как требуется информация о моменте силы и положении как шарнира первой инструментальной руки, так и шарнира первого хирургического инструмента) блокируется, тогда как первая инструментальная рука 112a и первый хирургический инструмент 113a остаются стационарными. При этом, датчик крутящего момента, смонтированный на каждом шарнире, измеряет момент силы, вызываемый деформацией шарнира, обусловленной декартовой силой. Данный момент является первоначальным моментом. Датчик крутящего момента i-го шарнира может давать соответствующие показания . Блок управления получает первоначальное значение для каждого шарнира из датчика крутящего момента каждого шарнира.
Когда второй хирургический инструмент 113b выполняет операцию разрезания ткани, ткань должна находиться в расслабленном состоянии (ненатянутом состоянии). При этом момент силы, измеренный датчиком крутящего момента i-го шарнира, равен . Блок управления получает текущий момент силы на каждом шарнире из датчика крутящего момента каждого шарнира, и затем получает приращение момента силы на i-том шарнире, причем , где .
Далее, исходя из вышеупомянутого приращения , блок управления может получить командный момент силы на i-ом шарнире , причем , где знак минус означает противоположное направление. Далее, исходя из приращения , блок управления получает приращение положения i-го шарнира, причем , где означает жесткость управления каждым шарниром. Блок управления получает заданное положение i-го шарнира, причем , где текущее положение i-го шарнира измеряется вторым датчиком положения. В соответствии с заданным положением каждого шарнира, блок управления получает матрицу Якоби первой инструментальной руки 112a и первого хирургического инструмента 113a в заданном положении путем кинематического вычисления, Далее, получается тяговое усилие , прилагаемое первым хирургическим инструментом 113a к тканям и органам человека в заданном положении, из выражения:
Далее, блок управления сравнивает модуль тягового усилия , прилагаемого первым хирургическим инструментом 113a к тканям и органам человека, с модулем предварительно заданной силы . Если абсолютное значение разности между вышеупомянутыми модулями не достигает некоторого допустимого значения, то блок управления извещает приводное устройство, что следует скорректировать каждый шарнир в соответствии с командным моментом силы на каждом; если же упомянутое значение разности превышает допустимое значение, то блок управления корректирует коэффициент , причем , где , означает размер шага, вновь получает приращение , где , и затем получает новое тяговое усилие, пока разность между модулем тягового усилия , прилагаемого первым хирургическим инструментом к тканям и органам человека, и модулем предварительно заданной силы не становится меньше допустимого значения.
В итоге, в роботизированной хирургической системе, предложенной в вариантах осуществления настоящего изобретения, первая инструментальная рука и первый хирургический инструмент выполнены с возможностью вытягивания тканей и органов человека, вторая инструментальная рука и второй хирургический инструмент предназначены для выполнения хирургических операций на тканях и органах человека. Блок управления содержит предварительно заданное значение силы, и блок управления сравнивает величину декартовой силы, прилагаемой тканями и органами человека к первому хирургическому инструменту, с предварительно заданным значением силы. Если предварительно заданное значение силы превышает величину декартовой силы, прилагаемой тканями и органами человека к первому хирургическому инструменту, то блок управления управляет приводным устройством, чтобы привести в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданным значением силы таким образом, чтобы величина тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам человека, достигала предварительно заданного значения силы. Таким образом, блок управления корректирует величину тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам человека в соответствии с предварительно заданным значением силы, таким образом, чтобы величина тягового усилия, прилагаемого первым хирургическим инструментом к тканям и органам человека, достигала предварительно заданного значения силы. В результате, обеспечивается функция автономного вытягивания роботизированной хирургической системы.
Вышеприведенное описание раскрывает всего лишь некоторые предпочтительные варианты осуществления настоящего изобретения и никак не ограничивает его объем. Все изменения и модификации, выполненные средними специалистами в данной области техники с учетом вышеописанных принципов, находятся в пределах объема, определяемого прилагаемой формулой изобретения.
Реферат
Изобретение относится к медицине, а именно к роботизированным хирургическим системам. Система содержит первую инструментальную руку, снабженную первым хирургическим инструментом, вторую инструментальную руку, снабженную вторым хирургическим инструментом, приводное устройство и блок управления, соединенный с возможностью связи с приводным устройством. Первая инструментальная рука и первый хирургический инструмент выполнены с возможностью вытягивания тканей и органов. Вторая инструментальная рука и второй хирургический инструмент выполнены с возможностью выполнения хирургической операции на тканях и органах. Блок управления выполнен с возможностью получения величины декартовой силы, прилагаемой тканями и органами к первому хирургическому инструменту, и сравнения величины декартовой силы с предварительно заданным значением силы. Если величина декартовой силы меньше, чем предварительно заданное значение силы, то блок управления управляет приводным устройством, чтобы приводить в движение первую инструментальную руку и первый хирургический инструмент в соответствии с предварительно заданным значением силы, чтобы увеличить тяговое усилие, прилагаемое первым хирургическим инструментом к тканям и органам, до предварительно заданного значения силы, так чтобы обеспечить состояние направленного наружу натяжения тканей и органов, в котором второй хирургический инструмент прикладывает усилие. Достигается обеспечение уменьшения кровотечения при операции, а также сглаживание разреза ткани. 13 з.п. ф-лы, 4 ил.
Комментарии