Элементы ключевого сегмента шкива, конфигурация группы сегментов, конструкция с кулачком и роликом и приведение в действие элементов в системе трансмиссии с синхронизированной перестановкой сегментов шкива - RU2627231C2
Код документа: RU2627231C2
Чертежи











Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Приоритет данной Заявки заявляется по предварительной патентной Заявке США №61/479032, поданной 26 апреля 2011 г., озаглавленной «Система трансмиссии с синхронизированной перестановкой сегментов шкива», полное содержание которой включено в данный документ посредством ссылки. Данная Заявка относится к публикации международной Заявки согласно РСТ, №WO 2005/111463, поданной 19 мая 2005 г., озаглавленной «Система трансмиссии с синхронизированной перестановкой сегментов шкива».
ОБЛАСТЬ ТЕХНИКИ
[0002] Данное изобретение относится к системам трансмиссии и, в частности, к мехатронным приводам с регулируемой скоростью.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0003] Система трансмиссии с синхронизированной перестановкой сегментов шкива («SSIPTS») является предметом публикации международной Заявки согласно РСТ, №WO 2005/111463, с датой приоритета 19 мая 2005 г., полное содержание которой включено в данный документ посредством ссылки.
[0004] Совершенствование SSIPTS выявило некоторые не известные ранее дополнительные признаки, которые могут обеспечить улучшение работы указанной системы мехатронного привода с регулируемой скоростью.
[0005] Следовательно, существует необходимость в новых усовершенствованиях и рассмотрении дополнительных признаков, используемых в SSIPTS.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Согласно одному аспекту предложен ключевой сегмент шкива, выполняющий функцию одного сегмента из набора сегментов шкива в системе трансмиссии с синхронизированной перестановкой сегментов шкива и имеющий на дистальном конце взаимосвязь с зубьями второго шкива, так что можно обеспечить одновременное зацепление с бесконечным элементом, при этом указанный ключевой сегмент шкива содержит один или несколько укороченных или полностью срезанных зубьев, являющихся либо первыми, либо последними зубьями в наборе сегментов шкива и предназначенных для зацепления с бесконечным элементом.
[0007] Согласно другому аспекту предложен ключевой сегмент шкива, выполняющий функцию одного сегмента из набора сегментов шкива в системе трансмиссии с синхронизированной перестановкой сегментов шкива и имеющий на дистальном конце взаимосвязь с зубьями второго шкива, так что можно обеспечить одновременное зацепление с бесконечным элементом, содержащий смежный сегмент шкива с удлиненными или консольными элементами зубьев, при этом вытянутая часть данного сегмента может обеспечивать или не обеспечивать плавное сопряжение с опорной поверхностью ключевого сегмента шкива.
[0008] Согласно следующему аспекту предложена поверхность, обеспечивающая опору для бесконечного элемента, выполненная на ключевом сегменте шкива и образованная путем укорочения или полного срезания одного или нескольких зубьев указанного сегмента в системе трансмиссии с синхронизированной перестановкой сегментов шкива.
[0009] Согласно еще одному аспекту предложена объединенная группа в системе трансмиссии с синхронизированной перестановкой сегментов, в состав которой входят несколько расположенных ступенчатым образом сегментов шкива, объединенных по вертикали или созданных на одном или нескольких компонентах, выполненных с возможностью скользящего перемещения, причем на внутренних и наружных поверхностях указанных сегментов выполнены сопрягаемые элементы и рельсовые направляющие, при этом любой из указанных сегментов объединенной группы может входить в зацепление с бесконечным элементом.
[0010] Согласно следующему аспекту, предложен центральный шкив, применяемый в системе трансмиссии с синхронизированной перестановкой сегментов шкива, выполненный с рельсовыми направляющими, которые стыкуются с сопрягаемыми элементами, выполненными на внутренней поверхности ближайшей объединенной группы, в состав которой входят несколько расположенных ступенчатым образом сегментов шкива, объединенных по вертикали или созданных на одном или нескольких компонентах, выполненных с возможностью скользящего перемещения, причем рельсовые направляющие указанного центрального шкива могут также выполнять функцию зубьев, которые могут входить в зацепление с бесконечным элементом.
[0011] Согласно следующему аспекту, предложен один или несколько кулачков, применяемых в системе трансмиссии с синхронизированной перестановкой сегментов шкива, при этом кулачки прикреплены или установлены с возможностью прикрепления в каркасе или кожухе, а также предложены ролики, неподвижные элементы или иные подобные ролики, работающие от кулачка, при этом к каждому ролику прикреплен рычаг, причем ролик и его рычаг установлены с возможностью скольжения или вращения в объединенных группах сегментов шкива и сообща способны обеспечивать перемещение объединенной группы сегментов шкива путем перемещения каждого ролика в рабочее положение и из указного положения, обеспечивающего зацепление с кулачком, таким образом, что отдельные сегменты шкива указанной группы могут быть перемещены в положение зацепления или выведены из указанного положения.
[0012] Согласно следующему аспекту предложен способ приведения в рабочее положение ролика или неподвижного элемента, либо другого подобного ролика, работающего от кулачка, а вместе с ним и рычага ролика, до момента зацепления ролика с кулачком, и выведения из рабочего положения, после момента зацепления ролика с кулачком, выполняемый при использовании массива установленных с возможностью прикрепления электромагнитов, расположенных вблизи траектории движения ролика, в непосредственной близости к кулачку, или выполненных как часть кулачка в системе трансмиссии с синхронизированной перестановкой сегментов шкива.
[0013] Согласно следующему аспекту, предложено устройство из нескольких кулачков, применяемое в системе трансмиссии с синхронизированной перестановкой сегментов шкива, выполненное таким образом, что можно обеспечить дискретное последовательное зацепление роликов или неподвижных элементов, либо других подобных роликов, работающих от кулачка, с соответствующими группами прикрепленных объединенных сегментов шкива, так что объединенная группа сегментов шкива может перемещаться в положения, которые соответствуют отдельным положениям зацепления входящих в группу сегментов шкива.
[0014] Согласно следующему аспекту, предложен массив установленных с возможностью прикрепления электромагнитов, расположенных таким образом, что путем синхронизации возбуждения одного или нескольких выбираемых электромагнитов для позиционирования и перемещения заданного элемента сегмента шкива может быть обеспечено дискретное приведение в действие элемента, выполненного на сегменте шкива или группе сегментов шкива в системе трансмиссии с синхронизированной перестановкой сегментов шкива, когда заданный элемент проходит вблизи выбранного электромагнита или электромагнитов, расположенных в виде массива, при этом данный элемент может являться самим сегментом шкива или группой сегментов шкива, роликом, роликом, работающим от кулачка, или другим неподвижным элементом, либо иным исполнительным элементом.
[0015] Согласно следующему аспекту, предложена система, обеспечивающая порядок возбуждения установленных с возможностью прикрепления электромагнитов, расположенных в виде массива, для позиционирования и перемещения элементов сегментов шкива, которые могут представлять собой сам сегмент шкива или группу сегментов шкива, ролик, ролик, работающий от кулачка, или другой неподвижный элемент, либо иной исполнительный элемент, так что может быть обеспечено дискретное приведение в действие отдельного сегмента шкива или группы сегментов шкива в системе трансмиссии с синхронизированной перестановкой сегментов шкива.
[0016] Специалисты в данной области техники лучше поймут и оценят указанные и другие особенности, преимущества и задачи, исходя из приведенного ниже описания, формулы изобретения и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Далее варианты выполнения изобретения будут описаны исключительно на примере и со ссылкой на прилагаемые чертежи.
[0018] Фиг.1 изображает боковую проекцию центрального шкива SSIPTS и наборы сегментов шкива, которые содержат ключевой сегмент шкива и смежный с ним сегмент шкива.
[0019] Фиг.2а изображает вид сбоку центрального шкива, набора сегментов шкива, содержащего ключевой сегмент шкива и смежный с ним сегмент шкива, а также зубчатого бесконечного элемента, причем указанный бесконечный элемент входит в одновременное зацепление с зубьями центрального шкива и зубьями ключевого сегмента шкива, при этом видно, что некоторые зубья бесконечного элемента расположены на опорной поверхности, образованной в зоне срезанных зубьев ключевого сегмента, вследствие чего радиус изгиба бесконечного элемента увеличивается.
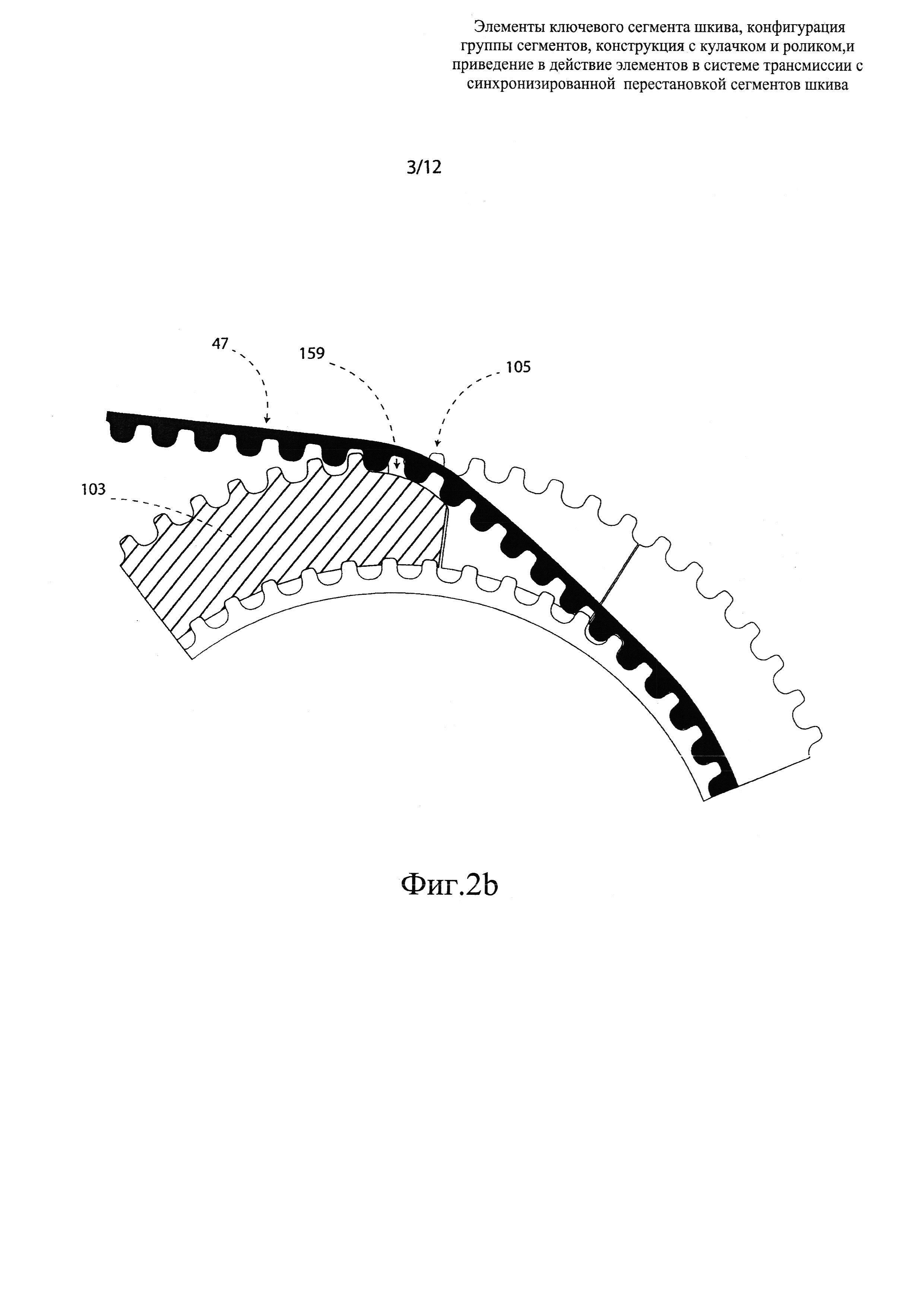
[0020] Фиг.2b изображает укрупненный вид того же центрального шкива, некоторых сегментов шкива из того же набора сегментов (содержащего тот же ключевой сегмент шкива и тот же смежный с ним сегмент шкива), и того же бесконечного элемента, что и на Фиг.2а, и в тот же самый переходный момент.
[0021] Фиг.2с изображает укрупненный вид части центрального шкива, ключевого сегмента шкива, смежного с ним сегмента шкива и сегмента шкива без изображения бесконечного элемента, что позволяет показать местоположение срезанных зубьев и опорную поверхность ключевого сегмента шкива, а также нависающую, вытянутую область смежного сегмента шкива.
[0022] Фиг.3а изображает вид в перспективе спереди и сбоку объединенной группы сегментов шкива.
[0023] Фиг.3b изображает вид в перспективе сзади и сбоку объединенной группы сегментов шкива.
[0024] Фиг.4 изображает изометрический вид спереди и сбоку шкива в сборе, при этом сегменты шкива расположены ступеньками, образуя объединенные группы сегментов шкива, причем некоторые из объединенных групп сегментов шкива находятся в состоянии перехода между передачами в процессе переключения SSIPTS.
[0025] Фиг.5 изображает вид сверху бесконечного элемента, обеспечивающего зацепление с двумя SSIPT системами, при этом некоторые из объединенных групп сегментов шкива нижней SSIPT системы показаны в состоянии перехода между передачами.
[0026] Фиг.6 изображает три вида шкива в сборе, при этом в данный момент объединенные группы сегментов шкива выровнены таким образом, что бесконечный элемент может входить в зацепление с одним набором сегментов шкива.
[0027] Фиг.7 изображает рельсовые направляющие и сопрягаемые элементы, выполненные на центральном шкиве.
[0028] Фиг.8 изображает вид сбоку кулачков, причем направляющие кулачков скрыты, а также роликов, пусковых рычагов, точек опоры пусковых рычагов, и электромагнит, установленный на объединенных группах сегментов шкива.
[0029] Фиг.9 изображает вид в перспективе объединенных групп сегментов шкива, расположенных в сборе со шкивом, с роликами, рычагами ролика и кулачками.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0030] Данное изобретение применяется как часть SSIPTS или во взаимодействии с SSIPTS, мехатронным приводом с регулируемой скоростью, который обеспечивает изменение передаточного числа под нагрузкой и содержит шкивы, разделенные на сегменты, которые перемещаются в каналах или по направляющим вдоль оси вращения, по направлению к траектории движения зубчатого ремня или цепи («бесконечного элемента») и от указанной траектории. В этом и нескольких последующих параграфах кратко описана работа SSIPTS, в контексте которой применяют данное изобретение.
[0031] В SSIPTS, когда сегменты зубчатых, концентрических и коаксиальных шкивов перемещаются в осевом направлении по каналам или направляющим, по направлению к траектории движения бесконечного элемента и от нее, с любой его стороны, движение сегментов шкива координирует система синхронизации и согласования во времени, а скоординированное движение сегментов шкива позволяет изменять положение зацепления бесконечного элемента между концентрическими шкивами, не нарушая их вращение или передачу мощности. Это достигается возможностью постоянного зацепления зубьев бесконечного элемента по меньшей мере с одним зубчатым шкивом, и в некоторых положениях - когда бесконечный элемент изменяет положение зацепления между шкивами - зацеплением зубьев бесконечного элемента как с входящим из зацепление, так и с выходящим из зацепления шкивами, в состоянии перехода.
[0032] Постоянное зацепление можно обеспечить, сделав определенные сегменты шкива «ключевыми сегментами шкива», при этом предыдущие сегменты шкива переходят из набора сегментов меньшего размера, а последующие сегменты шкива переходят в набор сегментов меньшего размера. Ключевые сегменты шкива имеют такое угловое взаимное расположение с одним или несколькими наборами сегментов меньшего размера, что окружное положение ключевого сегмента шкива позволяет обеспечить его зацепление с бесконечным элементом, в то время как указанный бесконечный элемент все еще находится в зацеплении с группой сегментов меньшего размера, не приводя к существенному взаимному влиянию или провисанию.
[0033] В SSIPTS индивидуальное перемещение каждого сегмента шкива обеспечивается исполнительным механизмом системы, при этом перемещение выполняется в осевом направлении из положения в расцепленном состоянии в положение зацепления и из положения зацепления в положение в расцепленном состоянии под управлением циклового контроллера системы, который обеспечивает перемещение соответствующих сегментов шкива из положения зацепления в положение в расцепленном состоянии или из положения в расцепленном состоянии в положение зацепления, выполняемое в такой последовательности и в такой момент времени, который обеспечивает оптимальное удержание бесконечного элемента, сцепленного с сегментами шкива нескольких наборов в процессе его перехода от набора сегментов шкива, выходящего из зацепления («начальный набор»), в набор сегментов шкива, входящий в зацепление («конечный набор»).
[0034] После того как ключевой сегмент шкива переместится в положение зацепления, каждый последующий сегмент шкива, входящий в тот же набор, последовательно перемещается в положение зацепления, проходя вне «зоны контакта» (угловая область контакта между бесконечным элементом и начальным набором). Таким образом, последующие сегменты шкива сохраняют зацепление бесконечного элемента с конечным набором. Исполнительный механизм обеспечивает перемещение каждого отдельного сегмента шкива со скоростью, которая достаточна для того, чтобы завершить движение сегмента между положением зацепления и положением в расцепленном состоянии, в любом направлении и в период времени, когда указанные сегменты находятся вне зоны контакта.
УСОВЕРШЕНСТВОВАННЫЕ ЭЛЕМЕНТЫ КЛЮЧЕВОГО СЕГМЕНТА ШКИВА
[0035] Один способ исполнения сегмента шкива в качестве ключевого сегмента предполагает поворот всего набора сегментов шкива (кольцо из сегментов шкива, которые в совокупности работают как шкив) вокруг оси вращения, до тех пор, пока указанные сегменты не выстроятся по окружности относительно второго шкива (или набора сегментов шкива), так чтобы ключевой сегмент шкива имел дистальную взаимосвязь с зубьями указанного второго шкива, и бесконечный элемент мог войти в зацепление с зубьями ключевого сегмента шкива и одновременно с зубьями второго шкива. Указанная дистальная взаимосвязь, главным образом, относится к шагу зубьев бесконечного элемента и положению зубьев второго шкива, которые расположены примерно тангенциально относительно зубьев ключевого сегмента шкива.
[0036] Другой способ исполнения сегмента шкива в качестве ключевого сегмента предполагает укорочение зуба, который является либо первым, либо последним в наборе сегментов шкива, для возможности зацепления с бесконечным элементом. Это позволит использовать сегмент шкива, входящий в набор сегментов, в качестве ключевого сегмента, без поворота всего набора сегментов шкива относительного другого шкива или набора сегментов шкива, что даст возможность использовать несколько сегментов шкива, входящих в один набор, в качестве ключевых сегментов.
[0037] На Фиг.1 можно видеть укороченный зуб 104, выполненный на ключевом сегменте 103 шкива. Одна возможная проблема, возникающая при выполнении укороченного зуба 104 на ключевом сегменте 103 шкива, заключается в том, что указанный зуб может влиять на круговую форму набора сегментов шкива при работе в качестве шкива. Для ослабления последствий изменения формы, сегмент 105 шкива, смежный с ключевым сегментом 103 шкива, может быть удлинен таким образом, что внутренняя часть профиля зуба («впадина», расположенная между зубьями сегмента) будет проходить по направлению к ключевому сегменту 103 шкива. Удлиненный таким образом смежный сегмент 105 шкива подходит к указанному сегменту 103, образуя впадину 106 между укороченным зубом 104 данного сегмента 103 и смежным с ним сегментом 105, который будет служить опорой для зуба бесконечного элемента, выступающего в пространство, образованное между указанными сегментами, когда и ключевой, и смежный с ним сегменты находятся в положении, в котором могут входить в зацепляющее взаимодействие с бесконечным элементом. Данное удлинение указанного смежного сегмента шкива будет обеспечивать круглую форму набора сегментов шкива, так что бесконечный элемент будет плавно взаимодействовать со всеми сегментами шкива, исключая вибрации и пробуксовку.
[0038] Комбинация двух указанных конструктивных особенностей, как укороченного зуба 104, выполненного на ключевом сегменте 103 шкива, так и удлинения смежного с ним сегмента 105 шкива для образования впадины 106 между указанным зубом 104, позволяет использовать большое число сегментов 48 шкива в качестве ключевого сегмента, так что бесконечный элемент может переходить либо от набора сегментов шкива большего размера к шкиву или набору сегментов шкива меньшего размера, либо от набора или сегментов шкива меньшего размера к набору сегментов шкива большего размера, без нежелательного взаимного влияния между любыми рабочими элементами и без провисания бесконечного элемента. Передача мощности от наборов сегментов шкива к взаимодействующему с ними шкиву или взаимодействующему с ними второму набору сегментов шкива (второй экземпляр SSIPTS), выполняемая посредством бесконечного элемента, может происходить на высокой скорости, поскольку может быть сохранена круглая форма наборов сегментов шкива при взаимодействии с ними бесконечного элемента.
[0039] Кроме того, с целью образования на ключевом сегменте шкива опорной поверхности для бесконечного элемента, зубья могут быть полностью срезаны. На Фиг.2а - Фиг.2с видно, что смежный сегмент 105 шкива удлинен, а зубья 104 ключевого сегмента шкива срезаны, и вместо них образована опорная поверхность 159, которая не допускает уменьшение радиуса кривизны бесконечного элемента 47. Изгиб опорной поверхности 159 имеет произвольный радиус кривизны, который определит любой специалист в данной области техники.
[0040] Радиус опорной поверхности можно менять для изменения натяжения бесконечного элемента и его прижатия к зубьям сегмента шкива, либо для исключения нежелательного взаимного влияния или провисания без изменения соотношения окружных параметров между двумя участвующими в переходе наборами сегментов шкива (включая начальный и конечный набор).
[0041] Другой уникальной функциональной особенностью ключевого сегмента шкива является удлиненный или нависающий зубчатый элемент смежного сегмента шкива. Сегмент шкива, смежный с зубчатым колесом, может иметь выступающую часть, которая выполнена с возможностью скользящего вхождения в сопряженное взаимодействие с опорной поверхностью ключевого сегмента шкива, тем самым получая опору в радиальном направлении от указанного сегмента. Нависающие зубья смежного сегмента шкива замещают «отсутствующие» зубья, которые были укорочены или полностью срезаны на ключевом сегменте шкива, как описано ранее, и тем самым дополняют набор сегментов шкива, так что когда все сегменты из набора сегментов шкива находятся в положении зацепления, отсутствует пропуск зубьев.
[0042] Выбором геометрического соотношения между нависающими зубьями сегмента и опорной поверхностью можно оптимизировать работу ключевого сегмента шкива. Опорная поверхность ключевого сегмента шкива и нависающие зубья могут иметь круглые или частично цилиндрические поверхности, на которых может происходить зацепление с бесконечным элементом. Для того чтобы опорная поверхность ключевого сегмента шкива и опорная поверхность нависающих зубьев не заедали или не сцеплялись в случае скручивания или смещения бесконечного элемента, одна или обе опорные поверхности могут иметь конструктивные элементы, которые обеспечивают обособление точки контакта, так что поверхности не будут сцепляться друг с другом. Данные элементы могут быть выполнены любым специалистом в данной области техники и могут содержать один или несколько специально спроектированных выступов, утолщений или направляющих, либо их сочетание, наряду с прочими элементами.
АЛЬТЕРНАТИВНАЯ КОНФИГУРАЦИЯ ГРУППЫ СЕГМЕНТОВ ШКИВА И ЕЕ ОСУЩЕСТВЛЕНИЕ
[0043] Некоторые сегменты шкива, входящие в группу сегментов, могут быть выполнены с возможностью совместного перемещения. В этом случае сегменты шкива из разных наборов, находящихся рядом друг с другом, могут быть соединены сваркой, сцеплены, соединены или выполнены в виде группы, которая может быть приведена в действие как один объект («объединенная группа»). На Фиг.3-Фиг.7 представлены различные изображения такой конфигурации и работа указанной объединенной группы.
[0044] Сегменты шкива, входящие в объединенную группу, могут быть расположены ступенчатым образом, так что любой из указанных сегментов может находиться в положении зацепления, когда объединенная группа перемещается вдоль оси вращения шкива в сборе. На Фиг.3a и Фиг.3b представлены два вида в изометрии ступенчатой группы сегментов шкива. Сегменты 48 шкива, относящиеся к разным группам и являющиеся соседними в вертикальном направлении, соединены или выполнены в виде единой группы 150. Зубья 52 сегмента шкива остаются доступными для зацепления с зубьями бесконечного элемента, когда объединенная группа 150 перемещает заданный сегмент 48 шкива в положение, соответствующее его зацеплению. Когда сегмент шкива перемещается к положению, соответствующему его зацеплению, перемещается вся группа, таким образом, тот сегмент шкива в группе, который до этого находился в положении зацепления, в это же самое время должен быть выведен из положения зацепления. В данном варианте выполнения перемещение одной объединенной группы, выполняемое таким образом, что один из ее сегментов входит в зацепление, обязательно должно означать такое перемещение другой группы, в результате которого происходит расцепление сегмента из данной группы, ранее находившегося в положении зацепления.
[0045] Объединенная группа может отличаться наличием рельсовых направляющих, расположенных на направленной книзу или на радиально «внутренней» поверхности данной группы, а именно, на поверхности, ближайшей к оси вращения шкива в сборе, на обращенной к оси вращения и направленной книзу или радиально «внутренней» стороне сегмента шкива, входящего в состав набора самых маленьких сегментов. Кроме того, объединенная группа может отличаться рельсовыми направляющими, расположенными на направленной кверху или радиально «наружной» поверхности данной группы, а именно, на поверхности, наиболее удаленной от оси вращения, на обращенной от оси вращения и направленной кверху или радиально «наружной» стороне сегмента шкива, относящегося к набору самых больших сегментов.
[0046] Шкив в сборе может иметь сопрягаемые элементы, в которые входят указанные внутренние рельсовые направляющие, а также иметь другие сопрягаемые элементы, в которые входят указанные внешние рельсовые направляющие, удерживающие объединенную группу относительно шкива в сборе, при этом предусматривая перемещение объединенной группы по соответствующим направляющим, параллельно оси вращения шкива в сборе, тем самым обеспечивая перемещение сегментов шкива, входящих в объединенную группу, в соответствующие им положения зацепления и выведение из указанных положений. Данные направляющие и сопрягаемые элементы объединенных групп шкива в сборе могут избавить от необходимости выполнения каналов или направляющих на поперечных или боковых гранях сегментов шкива, а наружные рельсовые направляющие на самой дальней поверхности шкива в сборе могут избавить от необходимости использования центрального шкива, так как в данном варианте выполнения набор самых маленьких сегментов становится «первой ступенью». На Фиг.3a и Фиг.3b показаны наружные сопрягаемые элементы 151 и внутренние сопрягаемые элементы 152. Согласно данному варианту выполнения можно обеспечить прочное размещение сегментов шкива - сегменты собраны с одной стороны бесконечного элемента в едином карусельном устройстве, в отличие от двустороннего расположения в карусельном устройстве других вариантов выполнения.
[0047] На Фиг.4 изображен вид в изометрии шкива в сборе, в момент перестановки ступенчатых объединенных групп сегментов шкива. Сегменты 48 шкива собраны в объединенные группы 150, включая наружные сопрягаемые элементы 151 и внутренние сопрягаемые элементы 152, которые вместе с рельсовыми направляющими 153 установлены на центральном шкиве 154, который в свою очередь установлен на валу 32 в блоке шкива.
[0048] На Фиг.5 изображен вид сбоку шкива в сборе, в момент перестановки ступенчатых объединенных групп сегментов шкива. На Фиг.5 представлен узел 155b ведущего шкива и узел 155а ведомого шкива, каждый из которых установлен на валу 32. Объединенные ступенчатые группы 150 сегментов шкива также можно подразделить на отдельные объединенные группы 150а-150j (объединенные группы 150d - 150g не просматриваются и не показаны на чертеже). Сегмент 48 шкива, второй от самого маленького сегмента в объединенных группах 150с, 150d, 150е, 150f, 150g, 150h, 150i и 150j находится в положении зацепления с бесконечным элементом 47, тогда как сегмент шкива, третий от самого маленького в объединенной группе 150а только что переместился в положение зацепления, а сегмент шкива, третий от самого маленького в объединенной группе 150b приведен в движение и перемещается в положение зацепления. В данном примере сегмент шкива, третий от самого маленького в объединенной группе 150а является ключевым сегментом шкива и, таким образом, входит в зацепление с бесконечным элементом 47 первым из своей группы.
[0049] На Фиг.6 изображены три вида шкива в сборе, при этом зацепление ступенчатых групп сегментов шкива в данный момент соответствует «второй передаче».
[0050] Ключевые сегменты шкива могут входить в одну объединенную группу или не все ключевые сегменты шкива могут входить в одну объединенную группу, причем любое количество сегментов объединенной группы могут являться ключевыми сегментами. Объединенная группа может не иметь ключевых сегментов шкива.
[0051] Зубья центрального шкива могут входить в зацепление с зубьями бесконечного элемента, так что зубья на центральном шкиве также могут служить в качестве направляющих центральной втулки, которые входят в сопряжение с внутренними рельсовыми направляющими ближайшей объединенной группы. На Фиг.7 изображены рельсовые направляющие 153 и сопрягаемые элементы 153, выполненные на центральном шкиве 154.
[0052] В системе исполнительного механизма SSIPTS, используемой отдельно или во взаимодействии с системой циклового контроллера SSIPTS, можно использовать механизм координационной подачи, храповой механизм или другую систему, обеспечивающую аксиальное перемещение объединенной группы в заданные положения или из указанных положений относительно траектории движения бесконечного элемента, для того чтобы каждый сегмент шкива указанной объединенной группы мог переместиться в положение, соответствующее его зацеплению.
[0053] Сегменты шкива группы, содержащей сегмент шкива из каждого набора сегментов шкива, могут быть разделены по вертикали на одну или несколько объединенных групп. Например, если восемь отдельных сегментов шкива, сгруппированных по вертикали в одну объединенную группу, создают трудности для работы направляющей системы или других систем, целесообразно разделить данную группу на две подгруппы, каждая из которых содержит по четыре ближайших в вертикальном направлении сегмента. В данном примере в системе SSIPT с восемью наборами сегментов шкива, сегменты, относящиеся к четырем наборам самых маленьких сегментов, могут быть собраны в одну объединенную группу, приводимую в действие одним исполнительным механизмом, тогда как сегменты, относящиеся к четырем группам самых больших сегментов, могут быть собраны во вторую объединенную группу, приводимую в действие вторым исполнительным механизмом.
[0054] Главное преимущество варианта выполнения, в котором используют объединенную группу, заключается в уменьшении количества исполнительных механизмов, а прочностные, весовые, размерные и рабочие характеристики могут быть рассчитаны любым специалистом в данной области техники.
КОНСТРУКЦИЯ С РОЛИКОМ И КУЛАЧКОМ
[0055] Объединенные группы сегментов шкива, составленные из отдельных сегментов, могут перемещаться таким образом, что любой сегмент шкива, входящий в данную группу, может быть перемещен в положение зацепления или выведен из указанного положения посредством системы кулачка или ролика («осевое перемещение группы»). В данной конфигурации каждая объединенная группа сегментов шкива имеет ролик, который с возможностью скольжения или вращения прикреплен к указанной группе посредством рычага ролика или другого опорного элемента. Кроме того, данный ролик может представлять собой неподвижный элемент или другой подобный ролик, работающий от кулачка, который покрыт смазкой или изготовлен из материала, выбираемого специалистами в данной области техники по прочностным, фрикционным характеристикам и по износостойкости, но далее по тексту называемый «роликом».
[0056] В функционировании SSIPTS участвуют один или несколько кулачков, причем кулачки прикреплены или установлены с возможностью прикрепления к каркасу или кожуху и расположены в зоне, в которой может отсутствовать зацепление сегментов шкива с бесконечным элементом (область вне SSIPTS «контактной зоны», которую можно назвать «неконтактная зона»). В неконтактной зоне кулачок может входить в зацепление с роликом и посредством зацепляющего взаимодействия перемещать объединенную группу сегментов шкива таким образом, что отдельные сегменты шкива указанной группы могут перемещаться в положение зацепления или выводиться из указанного положения.
[0057] Кулачки могут быть установлены в осевом или линейном расположении, либо могут отличаться тем, что один или несколько кулачков могут позиционно заменять друг друга. Один или несколько кулачков могут быть установлены с возможностью перемещения, что позволяет кулачку приспосабливаться к осевым перемещениям нескольких групп.
[0058] Ролик может быть перемещен относительно группы в положение зацепления с одним из кулачков («рабочее положение ролика») и выведен из указанного положения. Ролик может быть установлен на рычаге или другом перемещаемом опорном элементе, который обеспечивает направленное движение ролика между рабочим и нерабочим положениями ролика. Указанный опорный элемент далее в документе будет называться «рычагом ролика». Масса ролика и его рычага может быть уравновешена относительно оси вращения или скольжения, так что центростремительные силы будут влиять на положение ролика с положительным, отрицательным или нулевым эффектом, что считается предпочтительным специалистами в данной области техники.
[0059] На Фиг.8 изображены объединенные группы 150 сегментов шкива с кулачком 156, роликами 157 и рычагами 158 ролика, причем рычаги 158а, 158b, 158с, 158d и 158е соответствуют рабочему положению ролика, а рычаги 158f, 158g, и 158h находятся в нерабочем положении ролика.
[0060] Пока сегменты шкива группы находятся в «контактной зоне» SSIPTS, ролик может быть перемещен в рабочее положение, так что начинается осевое движение группы. Затем группа будет поворачиваться к «неконтактной зоне», ролик будет входить в зацепление с кулачком, и кулачок будет последовательно перемещать ролик и группу осевым образом, так что один из сегментов шкива указанной группы будет перемещаться из положения, соответствующего его зацеплению, в одно из его положений в расцепленном состоянии, и в результате данного движения второй сегмент шкива данной группы будет перемещаться из одного из положений в расцепленном состоянии в положение, соответствующее его зацеплению.
КОНСТРУКЦИЯ РАБОЧЕЙ ПОВЕРХНОСТИ КУЛАЧКА
[0061] Поверхность кулачка, которая входит в зацепление с роликом, когда ролик находится в рабочем положении («положение зацепления кулачка»), может представлять собой криволинейную поверхность, которая оптимизирована специалистами в данной области техники с целью минимизации суммарных сил и напряжений, включенных в осевое движение группы, а также с целью улучшения стабильности и бесперебойности движения и позиционирования объединенных групп сегментов шкива. Каждый кулачок может иметь характерную траекторию перемещения, оптимизированную по общей скорости шкива и другим физическим и рабочим характеристикам, которые являются конкретными для сегментов шкива, участвующих в осевом движении группы.
[0062] Кулачок может иметь канал, по которому перемещается ролик, так что в начале движения одна грань указанного канала преимущественно нажимает на рабочую поверхность ролика, двигая группу к месту назначения, а вторая, противоположная грань указанного канала преимущественно отталкивает его назад, замедляя и останавливая ролик, когда он достигает места назначения. Третья грань кулачка может быть обращена внутрь, по направлению к оси (являясь внутренней поверхностью или «дном» указанного канала) и может преимущественно быть коаксиальной с осью, обеспечивая удержание указанного ролика непосредственно между первой и второй гранями данного канала. К концу движения ролика посредством осевого движения группы, часть указанной третьей грани может входить в зацепление с указанным роликом, надавливая на внешнюю грань указанного ролика, тем самым, перемещая ролик по направлению к оси вращения, либо в противном случае, с целью перемещения ролика обратно, в его нерабочее положение. С целью удержания указанного ролика в его нерабочем положении до тех пор, пока он не будет активирован, можно использовать магнит, центростремительную силу, фиксатор или другой механизм.
ПРИВЕДЕНИЕ РОЛИКА В ДВИЖЕНИЕ
[0063] Ролик и соответствующий ему рычаг могут быть приведены в действие при использовании механизма, который электрическим или механическим способом управляется цикловым контроллером. Ролик может быть приведен в действие механическим способом при помощи соленоида, либо гидравлическими, пневматическими, магнитными или другими подобными механическими средствами. Один из способов приведения в действие ролика, который должен быть перемещен в рабочее положение, может предполагать использование электромагнитов, при этом данный способ не требует подведения электрической или механической мощности к вращаемому посредством вала шкиву в сборе. Электромагниты могут быть установлены в виде массива, с возможностью закрепления в кожухе вблизи траектории движения указанного ролика, так чтобы указанные магниты могли приводить в действие нужный ролик, перемещая его в рабочее или нерабочее положения («массив электромагнитов»). В таком случае ролик, рычаг ролика, либо его часть или части могут обладать ферромагнитными, магнитными свойствами или свойствами магнитной индукции, которыми, как установлено, обладает железо, магнит или проволочная катушка, соответственно, либо сочетанием указанных свойств. Массив электромагнитов может состоять из нескольких электромагнитов, каждый из которых по отдельности управляется цикловым контроллером, при этом электромагниты выполнены в виде кругового массива вблизи траектории движения ролика, в непосредственной близости к кулачку, или как его часть, так что ролик может проходить под каждым электромагнитом и, тем самым, при необходимости каждый электромагнит может воздействовать на ролик.
ЗАЦЕПЛЕНИЕ НЕСКОЛЬКИХ КУЛАЧКОВ РОЛИКОМ
[0064] Ролик будет обладать способностью к дискретному зацепляющему взаимодействию с несколькими кулачками (хотя в отдельный момент времени ролик зацепляет только один кулачок), для того чтобы иметь возможность завершить осевые перемещения нескольких групп, которые обеспечат перемещение группы в положения, соответствующие нескольким положениям зацепления сегментов шкива, составляющих группу. Обратимся к Фиг.9. Объединенные группы 150 сегментов шкива показаны с кулачками 156, роликами 157 и рычагами 158 ролика. Ролик 157а (соответствующий объединенной группе 150а) находится в рабочем положении ролика и почти полностью завершил свое зацепление с кулачком 156а. Ролик 157b и ролик 157с (с соответствующими объединенными группами 150b и 150с) находятся в рабочем положении ролика и показаны в положении зацепления с кулачком 156а. Ролик 157d показан в рабочем положении и только собирается войти в зацепление с кулачком 156а. На данном чертеже несколько роликов можно видеть в состоянии зацепления с кулачком 156а, который перемещает объединенную группу 150 из положения, в котором сегмент шкива данной группы, второй от самого маленького, может находиться в положении зацепления, до положения, в котором самый маленький сегмент указанной группы может находиться в положении зацепления. При этом SSIPTS выполняет переход от набора сегментов шкива, вторых от самого маленького, («вторая передача») к набору самых маленьких сегментов шкива («первая передача»). После того, как ролик 157 закончит зацепление с кулачком 156 - в данном изображенном примере, после того как, например, ролик 157а закончит свое зацепление с кулачком 156с - он будет иметь возможность зацепления с другим кулачком 156 (в изображенном на чертеже примере это кулачок 156b, и так далее, до конца диапазона установки кулачков). Данный процесс может продолжаться по нескольким переходам, как от наборов с более мелкими сегментами шкива к наборам с более крупными сегментами шкива, так и от наборов с более крупными сегментами шкива к наборам с более мелкими сегментами шкива, в пределах диапазона установки кулачков.
[0065] Чтобы обеспечить несколько траекторий движения указанного ролика, так чтобы ролик мог входить в зацепление с несколькими кулачками, можно выполнить несколько массивов электромагнитов, причем каждая отдельная траектория движения указанного ролика соответствует траектории каждого из положений зацепления кулачка.
АКТИВАЦИЯ С ВОЗМОЖНОСТЬЮ ВЫБОРА ОТДЕЛЬНОГО СЕГМЕНТА ШКИВА ПРИ ПОМОЩИ КОМПОНЕНТОВ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА, УСТАНОВЛЕННЫХ С ВОЗМОЖНОСТЬЮ ЗАКРЕПЛЕНИЯ
[0066] Возбуждение каждого электромагнита, входящего в указанный массив электромагнитов, может быть выполнено в строго определенный момент времени, с целью инициирования перемещения отдельного выбранного ролика в его рабочее положение. Активация может иметь место, когда указанный ролик приближается к указанному электромагниту, при этом существенно не влияя на положение предыдущего ролика, соответствующего соседней группе. Указанный ролик и группа, к которой он относится, могут быть выбраны системой циклового контроллера SSIPTS, поскольку ключевой сегмент шкива, входящий в набор сегментов, находящийся в настоящее время в зацеплении, расположен в указанной группе. Когда указанный ролик проходит под каждым электромагнитом указанного массива электромагнитов, он может оказаться первым роликом, на который воздействует электромагнит указанного массива. Далее электромагнит может оставаться в состоянии возбуждения, так что каждый из последующих роликов, проходящих вблизи указанного электромагнита, тоже будет испытывать его влияние, и последующие группы будут повторять осевое движение первой группы и, таким образом, каждый сегмент шкива, идущий после ключевого сегмента в наборе сегментов, будет последовательно перемещен подобно ключевому сегменту шкива, в положение, соответствующее его зацеплению, или выведен из указанного положения.
[0067] Лучшим вариантом осуществления данного изобретения является использование его в устройстве, требующем изменения зацепления между ведущим элементом и ведомым элементом. Одним из применений данного изобретения является его использование в автомобильном транспорте. В автомобиле данное изобретение могло бы заменить обычную коробку передач между двигателем и колесами, обеспечивая работу двигателя, приближенную к идеальному числу оборотов двигателя для данной скорости движения на дороге. Кроме того, посредством использования данного изобретения можно улучшить функцию современных систем отопления, вентиляции и кондиционирования воздуха (HVAC) и обеспечить существенную эффективность и другие преимущества.
[0068] В тех случаях, когда определенный зуб первого сегмента шкива, входящего в первый набор сегментов шкива, или определенный зуб второго сегмента шкива, входящего в данный первый набор сегментов шкива, укорочен или модифицирован иным образом с целью функционирования данного второго сегмента в качестве второго ключевого сегмента шкива, улучшается переход бесконечного элемента от первого набора сегментов шкива ко второму набору сегментов шкива, поскольку периферическое положение первого сегмента уже может быть определено. При желании, несколько сегментов шкива данного набора сегментов могут быть выполнены как ключевые сегменты шкива, по усмотрению специалистов в данной области техники.
[0069] Смазка сегментов шкива может обеспечить безотказное скольжение указанных сегментов между положениями зацепления и положениями в расцепленном состоянии. Смазка может представлять собой покрытие в виде вещества с низким коэффициентом трения, нанесенное на поверхности скольжения сегментов шкива. На поверхности шкива в сборе, которые входят в сопряжение с указанными поверхностями сегментов шкива, тоже могут быть нанесены покрытия из того же самого вещества, что и нанесенное на поверхности скольжения указанных сегментов шкива, или другого вещества с низким коэффициентом трения. Кроме того, через небольшие отверстия, выполненные в определенных поверхностях блока шкива, которые входят в сопряжение с поверхностями скольжения сегментов шкива, может быть направлен подаваемый под давлением газ, например, воздух, образуя подушку из газа для уменьшения трения. Смазочное вещество может быть нанесено в первую очередь на поверхности скольжения сегментов шкива, которые обращены от оси вращения, и поверхности скольжения блока шкива, а также на другие поверхности указанного сегмента шкива, которые могут находиться в непосредственной близости от поверхностей скольжения сегмента шкива, которые обращены от оси вращения, с целью уменьшения трения, вызванного центробежными силами, действующими на указанный сегмент в результате вращения вокруг оси вращения шкива в сборе.
[0070] Несмотря на то, что приведенное выше описание относится к конкретному предпочтительному варианту выполнения, как предполагают на сегодняшний день авторы изобретения, специалистам в данной области техники понятно, что в широком смысле изобретение включает механические и функциональные эквиваленты элементов, описанных в данном документе.
[0071] Очевидно, что объем правовой охраны данного изобретения ограничен лишь приведенной ниже формулой изобретения.
Реферат
Изобретение относится к мехатронным приводам с регулируемой скоростью. Система трансмиссии с синхронизированной перестановкой сегментов шкива содержит центральный шкив, ключевой сегмент шкива, опорную поверхность на ключевом сегменте шкива, объединенную группу в системе трансмиссии с синхронизированной перестановкой сегментов шкива, кулачки для перемещения сегмента шкива, массив электромагнитов для перестановки сегментов шкива. Центральный шкив выполнен с рельсовыми направляющими, которые сопрягаются с сопрягаемыми элементами, в состав которых входят несколько расположенных ступенчатым образом сегментов шкива, объединенных по вертикали, выполненных с возможностью скользящего перемещения. Рельсовые направляющие центрального шкива могут выполнять функцию зубьев. Ключевой сегмент шкива содержит смежный сегмент шкива с удлиненными или консольными элементами зубьев и с вытянутой частью, обеспечивая плавное сопряжение с опорной поверхностью ключевого сегмента шкива. Объединенная группа содержит несколько расположенных ступенчатым образом сегментов шкива, объединенных по вертикали или созданных на одном или нескольких компонентах, выполненных с возможностью скользящего перемещения. На внутренних и наружных поверхностях сегментов выполнены сопрягаемые элементы и рельсовые направляющие. Кулачки для перемещения сегмента шкива выполнены с возможностью прикрепления в каркасе или кожухе. К каждому ролику прикреплен рычаг. Ролик и его рычаг установлены с возможностью скольжения или вращения в объединенных группах сегментов шкива. Система кулачков для перемещения сегмента шкива выполнена с обеспечением возможности дискретного последовательного взаимодействия роликов или неподвижных элементов. Достигается повышение надежности устройства. 12 н. и 3 з.п. ф-лы, 9 ил.
Комментарии