Реверсивная переменная трансмиссия (rvt) с повышенной удельной мощностью - RU2654431C2
Код документа: RU2654431C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области коробок передач и трансмиссий транспортных средств. В частности, настоящее изобретение обеспечивает новый тип реверсивной переменной трансмиссии для транспортных средств, таких как легковые автомобили, автобусы, грузовые автомобили, внедорожные автомобили, подъемно-транспортные тележки, манипуляторы с телескопической штангой и тому подобное. В качестве альтернативы, может быть использована коробка передач в системах, таких как ветряные мельницы и т.д. и других промышленных применениях, в которых требуется передача мощности при различных скоростях.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
В патентной заявке РСТ/EP2008/057009 описана реверсивная переменная трансмиссия, содержащая так называемые планетарные вариаторы, преодолевающие ограничения и недостатки фактических автомобильных трансмиссий, таких как механическая трансмиссия (MT), автоматическая трансмиссия (АТ), трансмиссия с двойным сцеплением (DCT), бесступенчатая трансмиссия (CVT), и гидростатический привод (HSD).
Согласно патентной заявке, упомянутой выше, можно использовать комбинацию из одного или нескольких планетарных вариаторов в различных схемах переменной трансмиссии. Планетарные вариаторы функционируют как подсистема для переменных или реверсивных трансмиссий, выполненных с возможностью непрерывного изменения передаточного отношения, и состоят из круглого зубчатого колеса, двух или более сателлитов, установленных вокруг центрального вала, и центрального зубчатого колеса таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами. Сателлиты состоят из сателлитного зубчатого колеса по существу с конической поверхностью вращения, предпочтительно упрочненной или покрытой для передачи тяговых и сжимающих нагрузок, установленного с возможностью свободного вращения вокруг сателлитной вилки посредством радиальных и осевых подшипников или втулок, причем виртуальная вершина упомянутого конуса совпадает с пересечением оси центрального вала с осью шарнира сателлита. Каждая сателлитная вилка одного планетарного вариатора выполнена с возможностью свободного вращения вокруг шарнирного соединения, ось которого перпендикулярна оси центрального вала и параллельна плоскости сателлитного зубчатого колеса, причем каждая сателлитная вилка и каждое сателлитное зубчатое колесо выполнено с возможностью не взаимодействовать друг с другом для всех применимых углов наклона между осью сателлита и осью центрального вала. Круглое зубчатое колесо, сателлиты и центральное зубчатое колесо прижаты друг к другу для того, чтобы поверхности качения находились в контакте друг с другом, и чтобы контактные давления были достаточно высокими для передачи требуемого крутящего момента. Центральный вал перемещается аксиально с определенной скоростью в зависимости от сжимающей силы и передаваемого крутящего момента для того, чтобы изменять передаточное отношение, и форма поверхностей качения сателлитных зубчатых колес, которые по существу являются коническими, слегка отклоняется от этой теоретической формы выпуклым образом для оптимизации распределения контактного давления.
Рассматривая реверсивную переменную трансмиссию патентной заявки РСТ/EP2008/057009, содержащую первичный и вторичный планетарные вариаторы, круглое зубчатое колесо первичного планетарного вариатора соединено с корпусом для того, чтобы оно не могло вращаться, но могло перемещаться аксиально за счет предварительной нагрузки, прижимающей контакты качения обоих планетарных вариаторов. Центральные валы обоих планетарных вариаторов объединены в один главный вал и соединены с возможностью вращения с трансмиссионным входным валом и с возможностью аксиального перемещения с помощью усилия рулевого управления в обоих направлениях, в то время как входной вал не перемещается аксиально. Центральное зубчатое колесо первичного планетарного вариатора подсоединено к круглому зубчатому колесу вторичного планетарного вариатора для того, чтобы комбинированное круглое-центральное зубчатое колесо могло вращаться вокруг центральной оси трансмиссии. Центральное зубчатое колесо вторичного планетарного вариатора соединено с выходным валом трансмиссии, причем противодействующая сила предварительной нагрузки передается на корпус через осевой подшипник.
Относительные размеры круглого зубчатого колеса, центрального зубчатого колеса и сателлитов предпочтительно выбраны соответственно для применения в автомобиле, с учетом того, что самое высокое отношение скоростей является настолько высоким, что двигатель почти всегда может вырабатывать свою мощность в точке своей наилучшей эффективности, но также с учетом того, что самое высокое отношение скоростей заднего хода является достаточно высоким для приведения в движение автомобиля при средней скорости вращения двигателя и низком уровне шума заднего хода. Посредством перемещения главного вала трансмиссии передаточное отношение изменяется непрерывно между самым высоким отношением скоростей переднего хода во время остановки и наибольшим передаточным отношением заднего хода.
Нормальная сила на каждом контакте при качении создается одной предварительной нагрузкой, действующей со стороны корпуса на не вращающееся первичное круглое зубчатое колесо, и противодействующая сила передается посредством одного подшипника от вторичного центрального зубчатого колеса на корпус. Чистые усилия рулевого управления для определения положения главного вала и, таким образом, также для определения передаточного отношения, создаются за счет одной силы в одном из двух направлений и действуют от входного вала до главного вала, вдвоем вращаясь с одной и той же скоростью, причем противодействующая сила передается через подшипники от входного вала к корпусу.
Предварительная нагрузка, как описано выше, создается с помощью одного или более поршня и системы (систем) цилиндров между корпусом и первичным круглым зубчатым колесом и приводится в действие при помощи одного пневматического или гидравлического давления или создается за счет системы предварительной механической нагрузки, причем эта система предварительной механической нагрузки может также быть использована в качестве стояночного тормоза, когда трансмиссия задается при нулевом отношении скоростей. Давление рулевого управления создается гидравлической или пневматической системой поршня и цилиндра, способной функционировать в обоих направлениях, составляющей одно целое с выходным валом и главным валом. Гидравлическое или пневматическое давление для создания давления рулевого управления уплотнено между неподвижным корпусом и вращающимся входным валом с помощью поршневых колец или уплотнений, выполненных с возможностью уплотнения частей, вращающихся с различными скоростями вращения.
Реверсивная переменная трансмиссия патентной заявки РСТ/EP2008/057009, как указано выше, также обеспечивает гидравлическая систему и прикладную программу, предназначенную для регулирования реверсивной переменной трансмиссии с помощью гидравлического клапана в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве.
Внутренняя часть трансмиссии, где контакты при качении являются перемещающимися, заполняется инертным газом или обычным воздухом и разбрызгивающейся жидкостью для охлаждения и смазки, или газообразной средой с туманом холодильного агента, и эта упомянутая внутренняя часть изолирована от смазочного масла для подшипников и от наружной части трансмиссии. Несколько вариантов потока смазки для подшипников или втулок внутри сателлитов предоставлено с помощью реверсивной переменной трансмиссии патентной заявки PCT/EP2008/057009.
Реверсивная переменная трансмиссия обеспечивает пользователю передачу мощности с переменными скоростями в легковом автомобиле, грузовом автомобиле, автобусе, внедорожном автомобиле, сенокосилке, ветряной турбине, манипуляторе с телескопической стрелой, автопогрузчике или любом другом промышленном применении, в котором требуется передача мощности с переменными скоростями.
Однако конфигурация системы реверсивной переменной трансмиссии содержит дополнительные возможности улучшения с точки зрения плотности мощности: при одних и тех же внешних габаритах можно передавать более высокую мощность. В пределах одного и того же размера трансмиссии и при одинаковом коэффициенте трения более высокая мощность передается за счет приложения более высоких нормальных сил на ведущие зубчатые колеса и за счет использования трансмиссии ближе к предельному значению тягового усилия. В основном изобретении раскрыто несколько модификаций конструкции, которая приводит к более высокой плотности мощности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает улучшение реверсивной переменной трансмиссии (RVT), содержащей планетарные вариаторы, как определено ниже. RVT согласно настоящему изобретению имеет более высокую плотность мощности при тех же самых размерах RVT как, например, раскрыто в патентной заявке РСТ/EP2008/057009. В то время как первоначальная RVT, описанная в патентной заявке PCT/EP2008/057009, имела расчетный предел, до которого можно выдерживать сжимающее давление вплоть до приблизительно 10 бар, настоящее изобретение обеспечивает для RVT возможность поддержания более высокие сжимающих давлений, типично в диапазоне от 20 до 150 бар.
Типично, планетарной вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержит круглое зубчатое колесо, два или более сателлитов установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы каждый компонент, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, образовывали зону взаимодействия с другими трансмиссионными компонентами. Типично, каждый сателлит содержит сателлитное зубчатое колесо, движущееся по рабочей поверхности упомянутого центрального или круглого зубчатого колеса, и сателлитную вилку, подсоединяющую сателлит к упомянутому центральному валу.
Более конкретно, предложен планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, выполненный с возможностью непрерывного изменения передаточного отношения, характеризующейся тем, что
- он состоит из круглого зубчатого колеса, двух или более сателлитов, установленных вокруг центрального вала, и центрального зубчатого колеса таким образом, чтобы каждый компонент, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, образовывали зону взаимодействия с другими трансмиссионными компонентами;
- круглое зубчатое колесо представляет собой осесимметричное тело вокруг центральной оси с поверхностью вращения, образованной в соответствии с трактрисой, причем эта поверхность предпочтительно упрочнена или покрыта для выдерживания тяговых и сжимающих нагрузок;
- центральное зубчатое колесо по существу является таким же, как круглое зубчатое колесо, но внутренний и наружный диаметр трактрисы может отличаться от диаметров круглого зубчатого колеса;
- сателлиты состоят из сателлитного зубчатого колеса по существу с конической поверхностью вращения, предпочтительно упрочненной или покрытой для передачи тяговых и сжимающих нагрузок, установленного с возможностью свободного вращения вокруг сателлитной вилки посредством радиальных и осевых подшипников или втулок, причем виртуальная вершина упомянутого конуса совпадает с пересечением оси центрального вала с осью шарнира сателлита;
- каждая сателлитная вилка одного планетарного вариатора выполнена с возможностью свободного вращения вокруг шарнирного соединения, ось которого перпендикулярна оси центрального вала и параллельна плоскости сателлитного зубчатого колеса, причем каждая сателлитная вилка и каждое сателлитное зубчатое колесо выполнено с возможностью не взаимодействовать друг с другом для всех применимых углов наклона между осью сателлита и осью центрального вала;
- круглое зубчатое колесо, сателлиты и центральное зубчатое колесо прижаты друг к другу для того, чтобы поверхности качения находились в контакте друг с другом и чтобы контактные давления были достаточно высокими для передачи требуемого крутящего момента;
- центральный вал перемещается аксиально (продольно) с определенной скоростью в зависимости от сжимающей силы и передаваемого крутящего момента для того, чтобы изменять передаточное отношение;
- трактриса круглого и центрального зубчатого колеса имеет, для обоих, параметр длины L такой же, как длина от контактной точки при качении сателлитного зубчатого колеса до пересечения оси шарнира с осью центрального вала, где L используется в уравнении трактрисы;
- +/-x+c= L*(cosα + ln|tan (α/2)|), где с – произвольная константа, и α – угол наклона между касательной в контактной точке и осью центрального вала;
- форма поверхностей качения сателлитных зубчатых колес, которые по существу являются коническими, слегка отклоняется от этой теоретической формы выпуклым образом для оптимизации распределения контактного давления.
Типично, реверсивная переменная трансмиссия (RVT) содержит первичный и вторичный планетарные вариаторы, содержащие круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо, таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами. Типично, каждый сателлит содержит сателлитное зубчатое колесо, движущееся по рабочей поверхности упомянутого центрального или круглого зубчатого колеса, и сателлитную вилку, подсоединяющую сателлит к упомянутому центральному валу.
Более конкретно, реверсивная переменная трансмиссия (RVT) содержит первичный и вторичный планетарные вариаторы и характеризуется тем, что:
- круглое зубчатое колесо первичного планетарного вариатора соединено с корпусом для того, чтобы оно не могло вращаться, но могло перемещаться аксиально посредством предварительной нагрузки, прижимающей все контакты качения обоих планетарных вариаторов;
- центральные валы обоих планетарных вариаторов комбинированы в один главный вал и соединены с возможностью вращения с трансмиссионным входным валом и с возможностью аксиального перемещения посредством усилия рулевого управления в обоих направлениях, в то время как входной вал не перемещается аксиально;
- центральное зубчатое колесо первичного планетарного вариатора подсоединено к круглому зубчатому колесу вторичного планетарного вариатора для того, чтобы комбинированное круглое-центральное зубчатое колесо могло вращаться вокруг центральной оси трансмиссии;
- и центральное зубчатое колесо вторичного планетарного вариатора соединено с выходным валом трансмиссии, причем противодействующая сила предварительной нагрузки передается на корпус через осевой подшипник.
Удельная мощность концепции трансмиссии, как описано в патентной заявке РСТ/EP2008/057009, была улучшена за счет прикладывания более высокой нормальной силы на ведущие зубчатые колеса и за счет добавления способа регулирования, позволяющего использовать трансмиссию ближе к своему пределу тягового усилия, чтобы прикладывать более высокую нормальную силу, адаптации и улучшения первоначальной конструкции, которые были выполнены. Все сравнения и улучшения, приведенные ниже по отношению к трансмиссионной системе, следует рассматривать в связи с патентной заявкой PCT/EP2008/057009, содержащей ссылки и исходные данные, с которыми производится сравнение.
Улучшения относятся к следующим компонентам реверсивной переменной трансмиссии:
- поршень рулевого управления;
- сателлиты: особенно по отношению к сателлитному зубчатому колесу, крышке сателлита, подшипнику сателлита и ножкам сателлитной вилки;
- стратегия регулирования сжимающего давления;
- выходной вал.
Во-первых, более высокая нормальная сила приводит к более высокому давлению на поршне рулевого управления в цилиндре рулевого управления. Цилиндр рулевого управления RVT, который вращается с входной скоростью, не выполнен как единое целое в стационарном корпусе для того, чтобы поршневые кольца были удалены из конструкции. Поршневые кольца ограничивали давление в цилиндре рулевого управления. В дополнение, удаление поршневых колец приводит к уменьшению компонентов, имеющих повышенное влияние на стоимость и сложность, а также на снижение инерции на входном валу.
Во-вторых, когда вариатор трансмиссии должен работать более близко к своему тяговому пределу, сателлитные зубчатые колеса, подсоединенные к одной и той же точке на главном валу, должны показывать точно такое же отношение. Поэтому сателлиты можно теперь настроить с использованием винтовой системы, выполненной как единое целое в пределах сателлитной вилки, для того, чтобы обеспечить правильное осевое расстояние от рабочей поверхности сателлитного зубчатого колеса до оси шарнира и, следовательно, устранить потери мощности и дисбаланс, который, вероятно, приводит к вибрациям.
Кроме того, сателлитные зубчатые колеса, которые используются в планетарных вариаторах или RVT, имеют более высокие нормальные силы, поэтому они были доработаны и содержат теперь двухстороннюю конструкцию кожуха, с помощью которой уменьшаются напряжения и деформации, что приводит к более тонкой и более легкой конструкции при одновременном уменьшении инерции. В дополнение, двухсторонний кожух, имеющий треугольное поперечное сечение, обеспечивает достаточную прочность при поперечных нагрузках.
По этой причине сателлитное зубчатое колесо, которое используется в планетарном вариаторе или RVT, было дополнительно доработано с тем, чтобы оно содержало ступицу сателлита и крышку сателлита, имеющую по существу форму плоского диска. Наружный диаметр крышки сателлита является коническим и помещается внутрь ступицы сателлита под таким же коническим углом. Все зазоры устраняются путем прикручивания крышки сателлита внутри ступицы сателлита. Таким образом, контактные напряжения смещения на конической поверхности прикладываются во избежание деформации ступицы сателлита и сателлитного зубчатого колеса. Диск крышки сателлита расположен внутри ступицы сателлита близко к положению, где верхний кожух сателлита опирается на ступицу сателлита. Это показано в качестве примера, не ограничивающим образом, на фиг.2.
Более высокие нормальные силы увеличивают силы, действующие на подшипники сателлитов. Конфигурация подшипника сателлитных зубчатых колес была улучшена за счет использования конического или осевого сферического роликового подшипника в сочетании только с одним радиальным подшипником, уменьшающим потери мощности подшипника и ведущим к более компактной и менее дорогостоящей конструкции подшипника.
Наконец, что касается сателлитов, используемых в планетарном вариаторе или RVT, в которых сателлитная вилка в основном нагружена из-за напряжений, связанных с передним приводом, и поэтому не нагружена равномерно, асимметричная конструкция является более походящей по сравнению с сателлитной вилкой с симметричными ножками. В более компактной и более надежной измененной конструкции сателлитной вилки ножки являются неравномерными, при этом ножка, подверженная большей нагрузке, немного толще, тогда как ножка, подверженная меньшей нагрузке, принимает форму немного более тонкого компонента.
Цель, состоящая в том, чтобы трансмиссия работала ближе к своему тяговому пределу, достигается за счет обеспечения того, что сжимающее давление не выше, чем сжимающее давление, необходимое для передачи крутящего момента за счет трения, повышенное с помощью минимального запаса безопасности. Таким образом, эффективность также увеличивается, потому что более высокое сжимающее давление будет только увеличивать внутренние потери трансмиссия.
Контроллер трансмиссии обычно вычисляет требуемое сжимающее давление, основываясь на фактическом отношении скоростей, скорости изменения отношения и входного крутящего момента (см. фиг.7a). Сигнал входного крутящего момента можно получить путем приема наибольшего сигнала из 2-х или 3-х источников:
входной крутящий момент из модели двигателя,
дополнительный входной крутящий момент, пересчитанный, исходя из измерения выходного крутящего момента,
входной крутящий момент, вычисленный из микропроскальзывания и сжимающего давления.
Микропроскальзывание непосредственно вычисляется путем из сравнения 2 сигналов:
теоретическое отношение скоростей без нагрузки, вычисленное из измеренного положения поршня рулевого управления,
измеренное фактическое отношение скоростей.
В качестве альтернативы (см. фиг.7b), контроллер трансмиссии вычисляет требуемое сжимающее давление, основываясь на фактической входной скорости, отношении скоростей, скорости изменения отношения и входного или выходного крутящего момента. Сигнал входного или выходного крутящего момента получается путем получения самого высокого сигнала из 1 или 2 источников:
входной крутящий момент из модели двигателя или из модели, описывающей выходной крутящий момент,
при необходимости из измерения выходного крутящего момента.
Сжимающее давление можно дополнительно регулировать за счет поддержания микропроскальзывания на заданном значении с помощью PID-контроллера.
Микропроскальзывание непосредственно вычисляется исходя из сравнения 2-х сигналов:
теоретическое отношение скоростей без нагрузки, вычисленное из измеренного положения поршня рулевого управления,
измеренное фактическое отношение скоростей.
Способ электронного регулирования также действует в качестве электронной защиты от макропроскальзывания.
Если требуется, наряду с этой электронной защитой от проскальзывания выполнена механическая защита от проскальзывания, включенная в конструкцию выходного вала RVT путем разделения этого вала на 2 части: вторичное центральное зубчатое колесо и выходной вал. Вторичное центральное зубчатое колесо центрируется с помощью выходного вала и аксиально опирается на выходной вал поверх тангенциальных скосов. Непредусмотренный максимальный крутящий момент на выходе будет вызывать пик давления на сжимающем давлении, то есть будет создаст пик осевой силы вторичного центрального зубчатого колеса напротив сателлитных зубчатых колес, тем самым стабилизируя микропроскальзывание.
Окончательная защита от макропроскальзывания добавляется путем установки как впрыска топлива двигателя, так и сжимающего давления одновременно на ноль всякий раз, когда пик крутящего момента превышает несущую способность по крутящему моменту трансмиссии.
Изобретение дополнительно обеспечивает следующие аспекты:
Аспект 1. Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, выполненный с возможностью поддержания сжимающего давления типично в пределах, но этим не ограничивается, диапазона от 20 до 150 бар, содержащий круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, причем каждый сателлит содержит сателлитное зубчатое колесо, движущееся по рабочей поверхности упомянутого центрального или круглого зубчатого колеса, и сателлитную вилку, подсоединяющую сателлит к упомянутому центральному валу, характеризующийся тем, что:
a) непрерывная или периодическая система регулирования выполнена как единое целое в виде сборного узла каждого сателлита для обеспечения того, чтобы вершина конуса, образованная теоретической, не заканчивающей собою верхнюю часть поверхностью скольжения сателлитного зубчатого колеса точно совпадала с осью шарнира сателлитной вилки при прикладывании определенной нагрузки на поверхность скольжения; и/или
b) сателлитное зубчатое колесо выполнено из верхнего кожуха сателлита и нижнего кожуха сателлита таким образом, чтобы нейтральное волокно верхнего кожуха сателлита по существу совпадало с вектором нормальных сил на рабочей поверхности сателлитного зубчатого колеса, и, таким образом, чтобы нейтральное волокно нижнего кожуха сателлита лежало по существу в плоскости, образованной тангенциальными силами, действующими на две контактные зоны рабочей поверхности; и/или
c) каждый сателлит содержит крышку сателлита и ступицу сателлита, и где:
- крышка сателлита и ступица сателлита собираются друг с другом без какого-либо зазора или с предварительной нагрузкой; и/или
- диск крышки сателлита устанавливается рядом с высотой, где верхний кожух сателлита опирается на ступицу сателлита; и/или
- крышка сателлита содержит по меньшей мере по существу плоский диск между контактной поверхностью со ступицей сателлита; и/или
d) осевые и часть радиальных сил, действующих на каждый сателлит, принимает на себя один конический подшипник или один осевой сферический роликовый подшипник, причем угол наклона для осевого сферического роликового подшипника определяется в центре роликового элемента, при этом оставшаяся часть радиальных сил опирается на один радиальный подшипник, и при этом опционально угол наклона нормали на поверхности качения наружного кольца в зависимости от осевой нагрузки изменяется в диапазоне от 20° до 50°; и/или
e) две ножки сателлитной вилки не являются идентичными.
Аспект 2. Реверсивная переменная трансмиссия с возможностью выдерживать сжимающее давление обычно в пределах, но этим не ограничивается, диапазона 20–150 бар, содержит первичный и вторичный планетарные вариаторы согласно аспекту 1.
Аспект 3. Реверсивная переменная трансмиссия согласно аспекту 2, дополнительно содержащая сжимающий поршень, который прижимает все ведущие зубчатые колеса друг к другу, и поршень рулевого управления для регулирования отношения скоростей, характеризующаяся тем, что:
а) поршень рулевого управления не вращается вместе с главным валом, но перемещается аксиально по отношению к корпусу, и он передвигает главный вал аксиально поверх осевого подшипника, и тем, что гидравлическое или пневматическое давления для поршня рулевого управления подается непосредственно или сбрасывается из корпуса без каких-либо динамических уплотнений, таких как поршневые кольца; и/или
b) контроллер трансмиссии вычисляет сжимающее давление, действующее на сжимающий поршень на основании сигнала входного или выходного крутящего момента, входной скорости, отношении скоростей и скорости изменения отношения, где сигнал входного крутящего момента является самым высоким из следующих 1 или 2 входных данных:
- b1) сигнал входного крутящего момента из модели двигателя, включающего в себя вспомогательные устройства, или из модели, описывающей выходной крутящий момент;
- b2) сигнал вспомогательного крутящего момента из устройства измерения выходного крутящего момента (фиг.7b); и/или
с) трансмиссия дополнительно содержит средство механического регулирования сжимающего давления и резервное средство для защиты от проскальзывания, выполненное как единое целое на выходном валу между центральным зубчатым колесом и осевым подшипником выходного вала, причем резервное средство для защиты от проскальзывания содержит смазочные тангенциальные скосы в обоих направлениях и центрирующее устройство для поддержания по центру вала центрального зубчатого колеса, где тангенс угла скосов соответствует пропорциональности максимального тангенциального усилия вала сверх осевого усилия выходного вала.
Аспект 4. RVT согласно аспекту 3, в которой в варианте b) сжимающее давление дополнительно регулируется путем поддержания микропроскальзывания на заданном значении с помощью PID-контроллера, и в которой упомянутое микропроскальзывание непосредственно вычисляется путем сравнения следующих 2 сигналов:
- b3) теоретическое отношение скоростей без нагрузки, полученное из измерения положения поршня рулевого управления, или отношения скоростей без нагрузки, вычисленного из измерений положения сжимающего поршня и знания требуемого направления движения, и
- b4) измеренное фактическое отношение скоростей.
Аспект 5. RVT согласно аспектам 3 или 4, содержащая признак b) и дополнительно содержащая окончательную защиту от проскальзывания в случае, когда крутящий момент превышает несущую способность по крутящему моменту трансмиссии, путем установки непосредственно сжимающего давления и крутящего момента двигателя в нуль до тех пор, пока прикладывается перегрузка, и в результате чего крутящий момент перегрузки обнаруживается в том случае, когда требуемое сжимающее давление превысит расчетный предел.
Аспект 6. Реверсивная переменная трансмиссия, содержащая первичный и вторичный планетарный вариатор, содержащий круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы каждый компонент, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, образовывали зону взаимодействия с другими трансмиссионными компонентами, дополнительно содержащая:
- сжимающий цилиндр со сжимающим поршнем, который прижимает все ведущие зубчатые колеса друг к другу, и цилиндр рулевого управления с поршнем рулевого управления для управления отношением, характеризующаяся тем, что:
- контроллер трансмиссии, который вычисляет сжимающее давление на основании сигнала входного крутящего момента, отношения скоростей и модели трансмиссии, где сигнал входного крутящего момента является самым высоким из следующих 2 или 3 входных данных:
- a) сигнал входного крутящего из модели двигателя, включающего в себя дополнительные механизмы,
- b) сигнал вспомогательного входного крутящего момента из устройства измерения выходного крутящего момента, пересчитанный на входной крутящий момент, с учетом передаточного отношения и потерь, и
- с) сигнал входного крутящего момента вычисленный с использованием модели трансмиссии с помощью фактического отношения скоростей и их изменения, фактического сжимающего давления и фактического проскальзывания, вычисленного путем сравнения следующих 2-х сигналов:
- с1) теоретическое отношение скоростей без нагрузки, полученное из измерения положения поршня рулевого управления, и
- с2) измеренное фактическое отношение скоростей (фиг.7a).
Аспект 7. Трансмиссия согласно аспекту 6, в которой на этапе с) отношение скоростей без нагрузки вычисляется путем измерения положения сжимающего поршня и знания запрашиваемого направления движения вместо измерения положения поршня рулевого управления.
Аспект 8. Трансмиссия согласно аспекту 6 или 7, дополнительно содержащая средство механического регулирования сжимающего давления и резервное средство для защиты от проскальзывания, выполненное как единое целое на выходном валу между центральным зубчатым колесом и осевым подшипником выходного вала, причем упомянутая защита от проскальзывания содержит смазочные тангенциальные скосы в обоих направлениях и центрирующее устройство для поддержания по центру вала центрального зубчатого колеса, причем тангенс угла скосов соответствует пропорциональности максимального тангенциального усилия вала сверх осевого усилия выходного вала.
Аспект 9. Трансмиссия по любому из аспектов 6-8, дополнительно содержащая окончательную защиту от проскальзывания в случае, когда крутящий момент превышает несущую способность по крутящему моменту трансмиссии, реализованную путем установки непосредственно сжимающего давления и крутящего момента двигателя в нуль до тех пор, пока прикладывается перегрузка, причем крутящий момент перегрузки обнаруживается тогда, когда требуемое сжимающее давление будет превышать расчетный предел.
Аспект 10. Реверсивная переменная трансмиссия, содержащая первичный и вторичный планетарный вариатор, содержащий круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, или RVT по любому из аспектов 6- 9,
характеризующаяся тем, что поршень рулевого управления не вращается вместе с главным валом, но перемещается аксиально по отношению к корпусу, и он перемещает главный вал аксиально над осевым подшипником, и тем, что гидравлическое или пневматическое давление для поршня рулевого управления подается непосредственно или сбрасывается из корпуса без каких-либо динамических уплотнений, таких как поршневые кольца.
Аспект 11. Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержащих круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, характеризующийся тем, что непрерывная или периодическая система регулирования выполнена как единое целое в виде сборного узла для обеспечения того, чтобы вершина конуса, образованная теоретической, не заканчивающей собою верхнюю часть, рабочей поверхностью сателлитного зубчатого колеса, точно совпадала с осью шарнира сателлитной вилки при прикладывании определенной нагрузки на рабочую поверхность.
Аспект 12: Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержащих круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, или планетарный вариатор согласно аспекту 11, характеризующийся тем, что:
- сателлитное зубчатое колесо выполнено из верхнего кожуха сателлита и нижнего кожуха сателлита таким образом, чтобы нейтральное волокно верхнего кожуха сателлита по существу совпадало с вектором нормальных сил на рабочей поверхности сателлитного зубчатого колеса, и, таким образом, чтобы нейтральное волокно нижнего кожуха сателлита лежало по существу в плоскости, образованной с помощью тангенциальных сил, действующих на 2 контактные зоны рабочей поверхности; и/или
Аспект 13: Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержащих круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, или планетарный вариатор согласно аспектам 11 или 12, характеризующийся тем, что:
- крышка сателлита и ступица сателлита собраны друг с другом без какого-либо зазора или с предварительной нагрузкой,
- диск крышки сателлита устанавливается близко к высоте, где верхний кожух сателлита опирается на ступицу сателлита, и/или
- крышка сателлита содержит по меньшей мере по существу плоский диск между контактной поверхностью со ступицей сателлита.
Аспект 14: Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержащих круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, или планетарный вариатор по любому из аспектов 6-8, характеризующийся тем, что:
- осевые и радиальные силы, действующие на сателлит, принимает на себя преимущественно 1 конический подшипник, в результате чего опционально угол наклона нормали на наружной круглой поверхности качения в зависимости от осевой нагрузки находится в диапазоне от 20° до 50° (см. фиг.8), где опционально этому коническому подшипнику оказывает помощь 1 подшипник скольжения или качения со значительно более низкой допустимой нагрузкой на подшипник.
Аспект 15. Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, содержащих круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, чтобы круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образовывали зону взаимодействия с другими трансмиссионными компонентами, или планетарный вариатор по любому из аспектов 11-15, характеризующийся тем, что 2 ножки сателлитной вилки не являются идентичными.
Аспект 16. Использование планетарного вариатора или RVT по любому из предыдущих аспектов, в пассажирских легковых автомобилях, грузовых автомобилях, мусоровозах, городских автобусах, внедорожных транспортных средствах, сенокосилках, подъемно-транспортных тележках, манипуляторах с телескопической стрелой, системах рекуперации кинетической энергии (KERS), ветряных турбинах или в промышленных применениях, в которых мощность должна передаваться с переменными скоростями.
Любой из вышеописанных вариантов можно объединить в одном предпочтительном варианте осуществления, охватывающем все улучшения. Таким образом, изобретение обеспечивает планетарные вариаторы, имеющие все улучшения вышеупомянутых вариантов осуществления, и RVT, охватывающие все улучшения вышеупомянутых вариантов осуществления как RVT, так и планетарных вариаторов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Описание вариантов осуществления изобретения будет представлено только посредством примера со ссылкой на прилагаемые чертежи. Перечень деталей, показанных на чертежах: входной вал (1), корпус (2), поршень (3) рулевого управления, осевой подшипник (4), главный вал (5), сателлитное зубчатое колесо (6), верхний кожух (7) сателлита, нижний кожух (8) сателлит, ступица (9) сателлита, крышка (10) сателлита, сателлитная вилка (11), вал (12) сателлита, стопорный винт (13), конический подшипник (14), радиальный подшипник (15), рабочая поверхность (16) сателлитного зубчатого колеса, ось (17) шарнира сателлитной вилки, верхнее нейтральное волокно (18), нижнее нейтральное волокно (19), калибр (20), сжимающий поршень (21), вал (22) центрального зубчатого колеса со скосами, выходной вал (23) со скосами, тангенциальный скос (24), угол (25) наклона нормали на поверхности качения наружного кольца, радиальная сила (26), осевая сила (27), результирующая сила силы (28) радиальной и осевых сил, угол (29) результирующей силы.
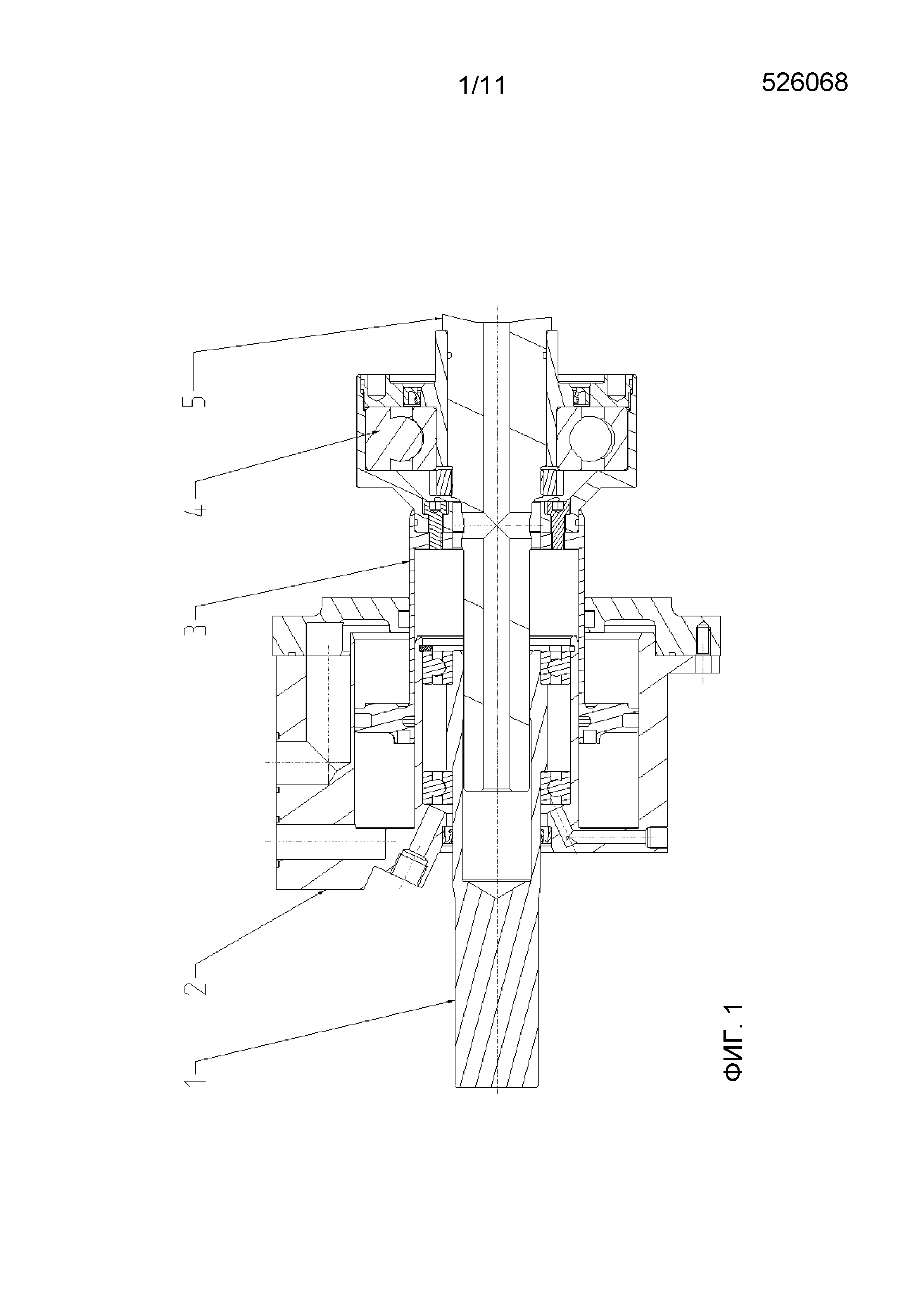
Фиг.1 - схематичный вид поршня рулевого управления.
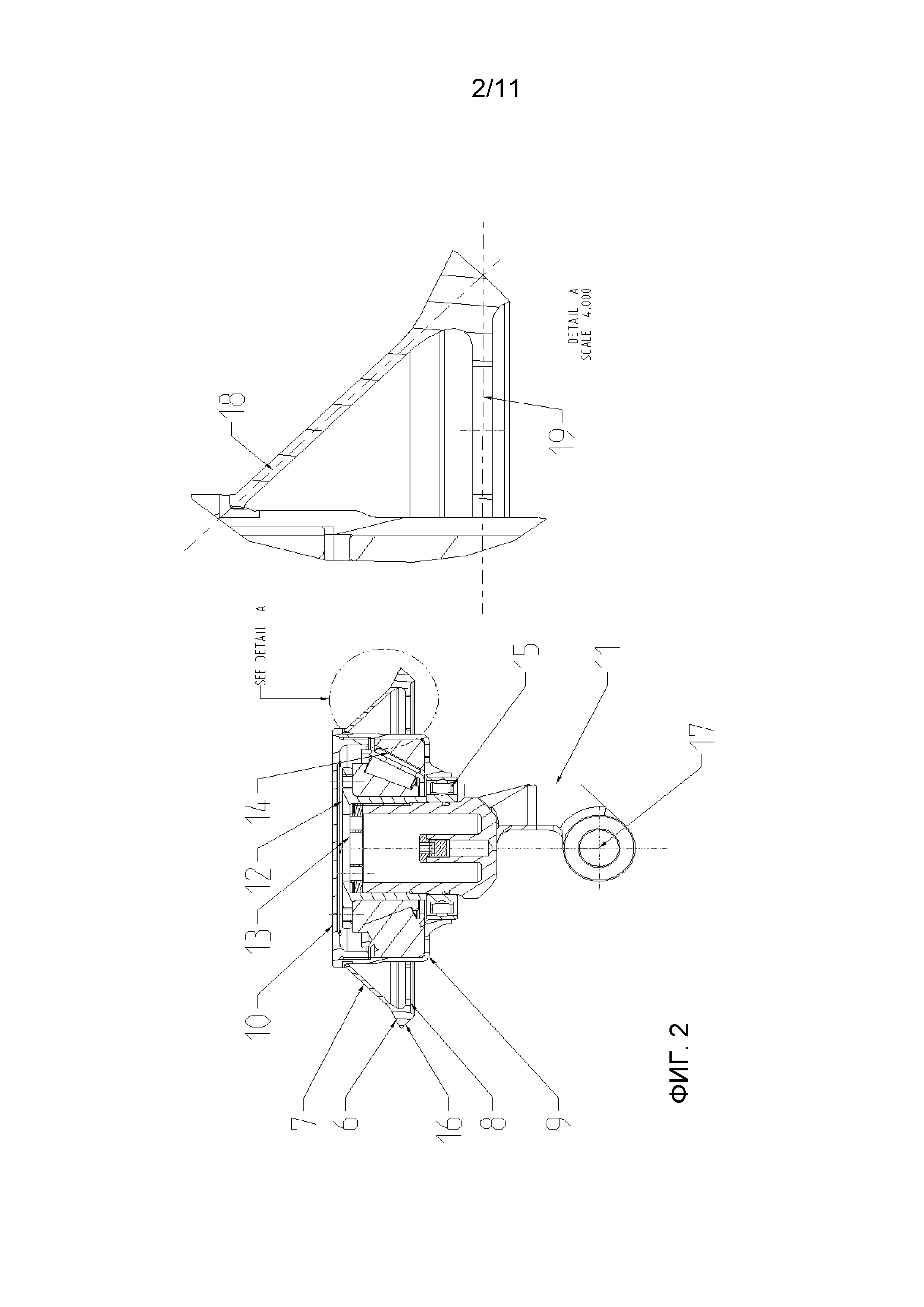
Фиг.2 - схематичный вид системы настройки сателлита, формы сателлитов, крышки сателлита и подшипников сателлитного зубчатого колеса.
Фиг.3 - схематичный вид асимметричной сателлитной вилки с неравномерными ножками.
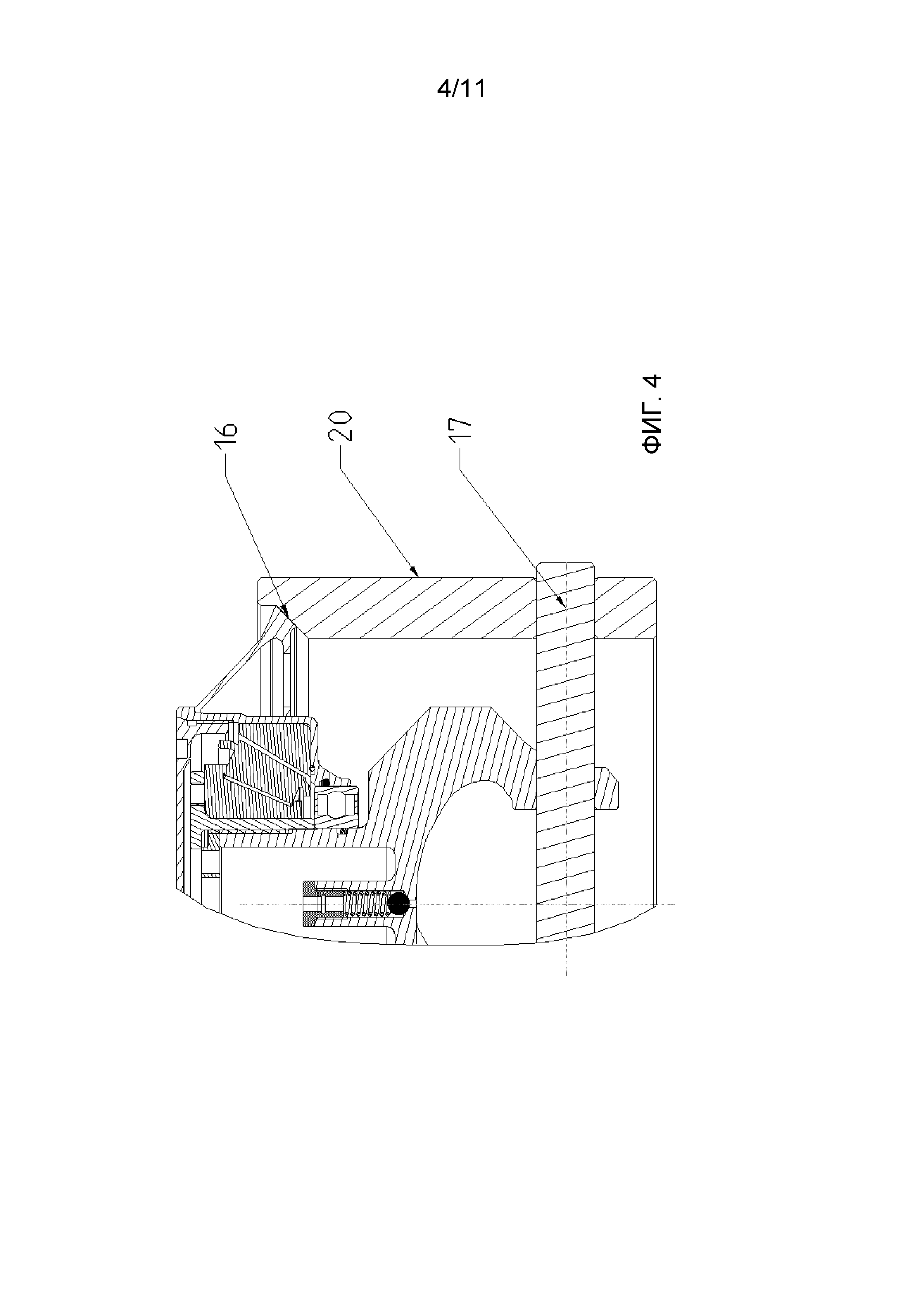
Фиг.4 - схематичный вид настройки сателлита с помощью калибра.
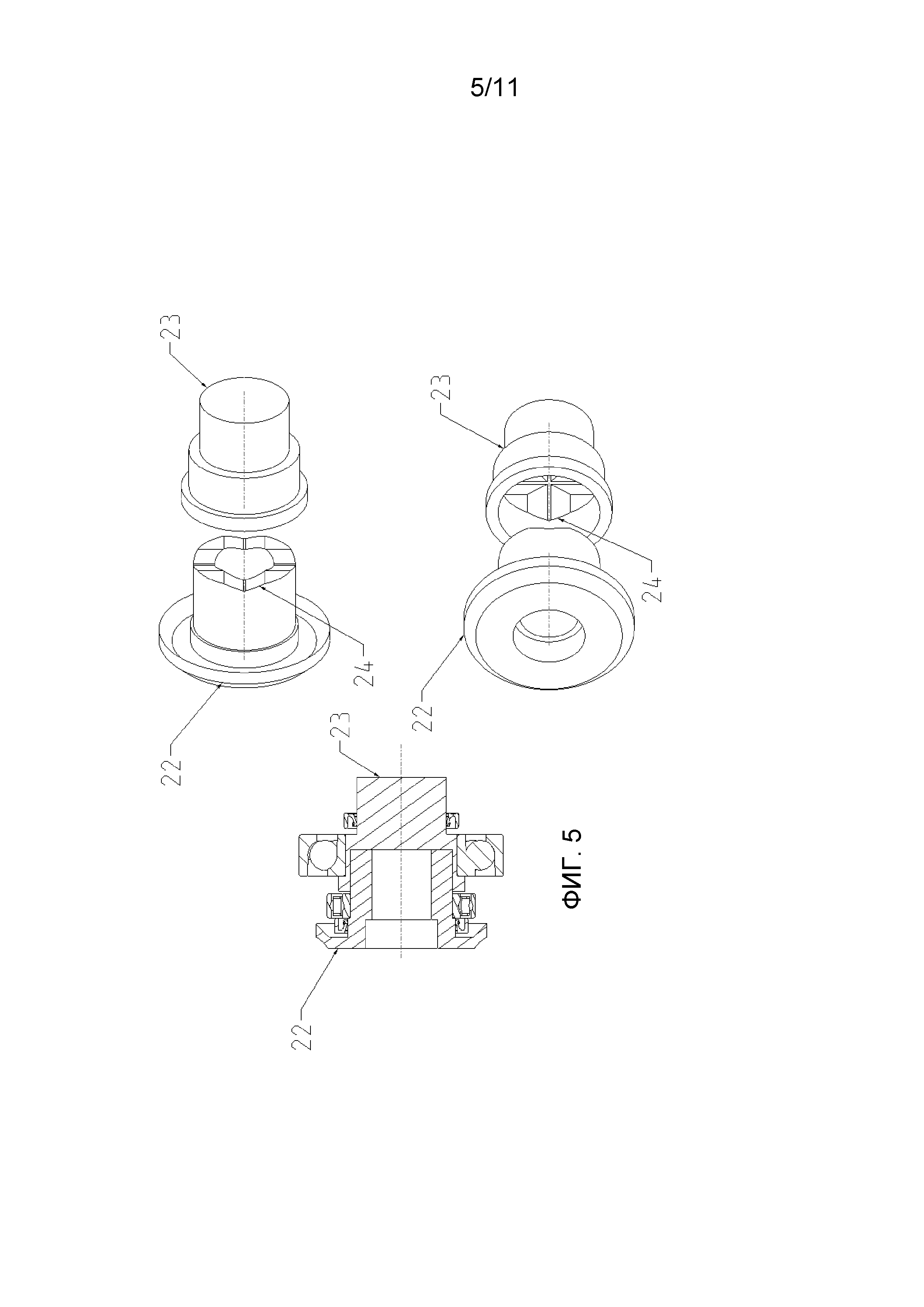
Фиг.5 - схематичный вид механической защиты от проскальзывания.
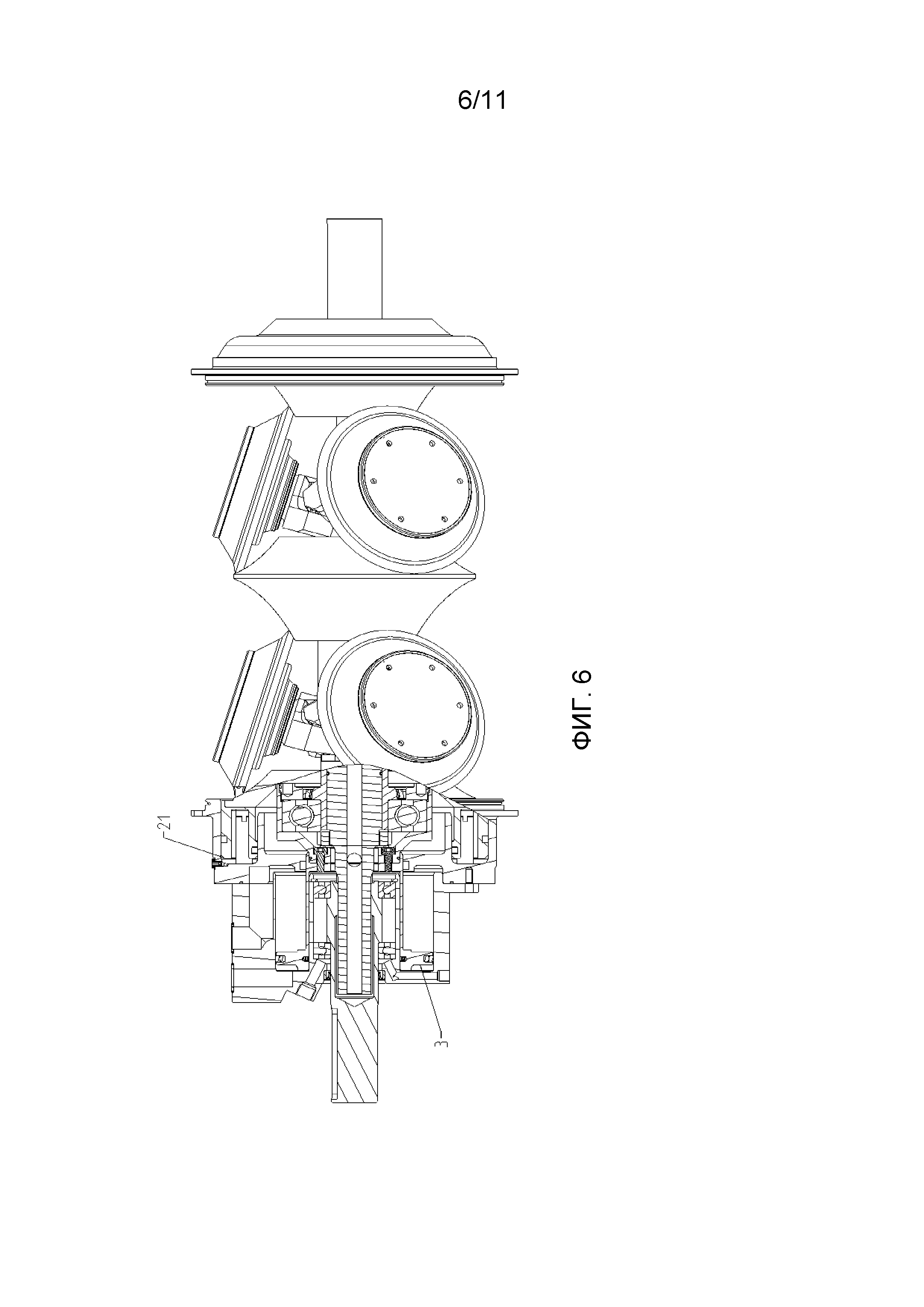
Фиг.6 - схематичный вид реверсивной переменной трансмиссии согласно изобретению.
Фиг.7 - схематичные виды систем регулирования с обратной связью и электронной защитой от проскальзывания.
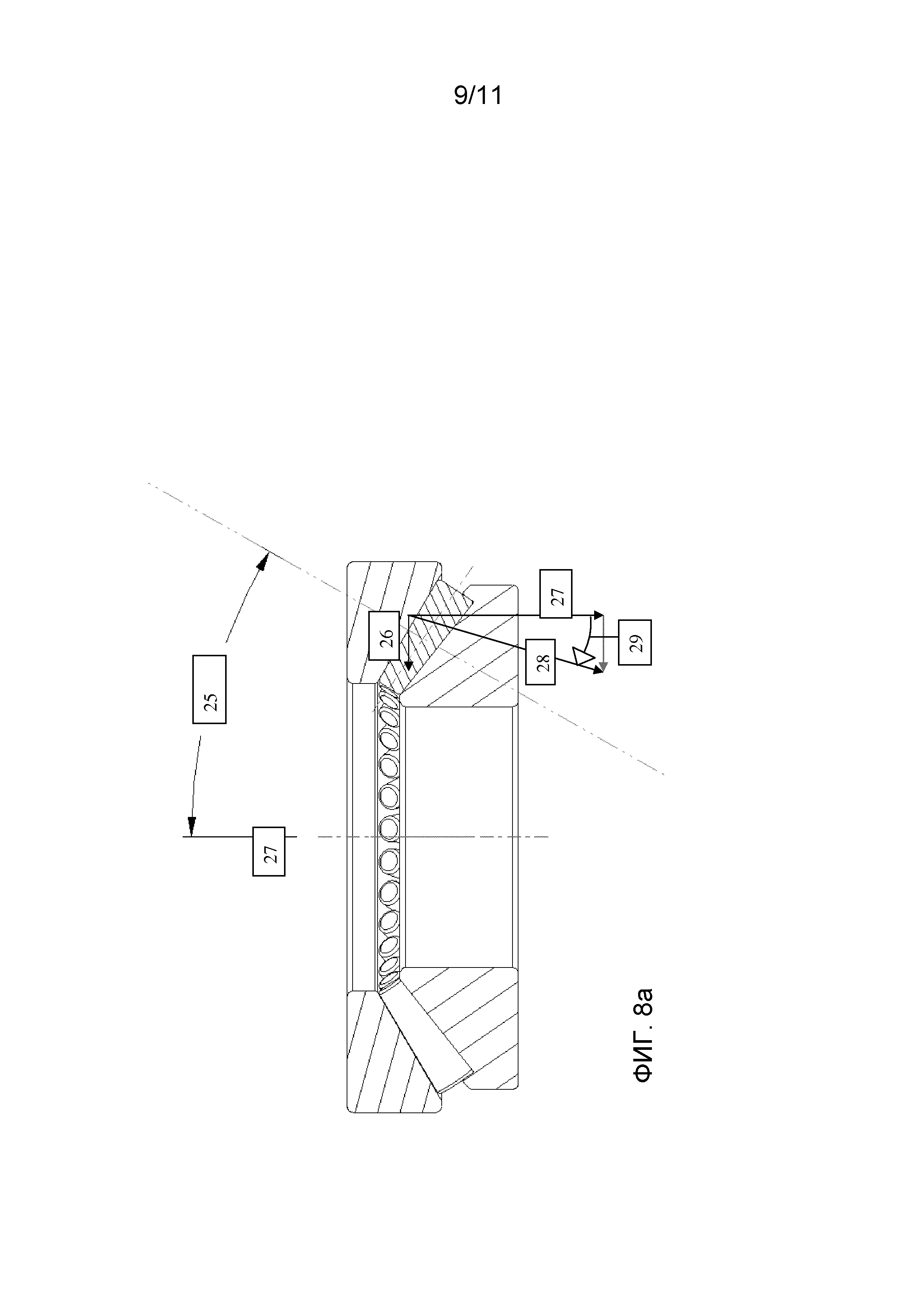
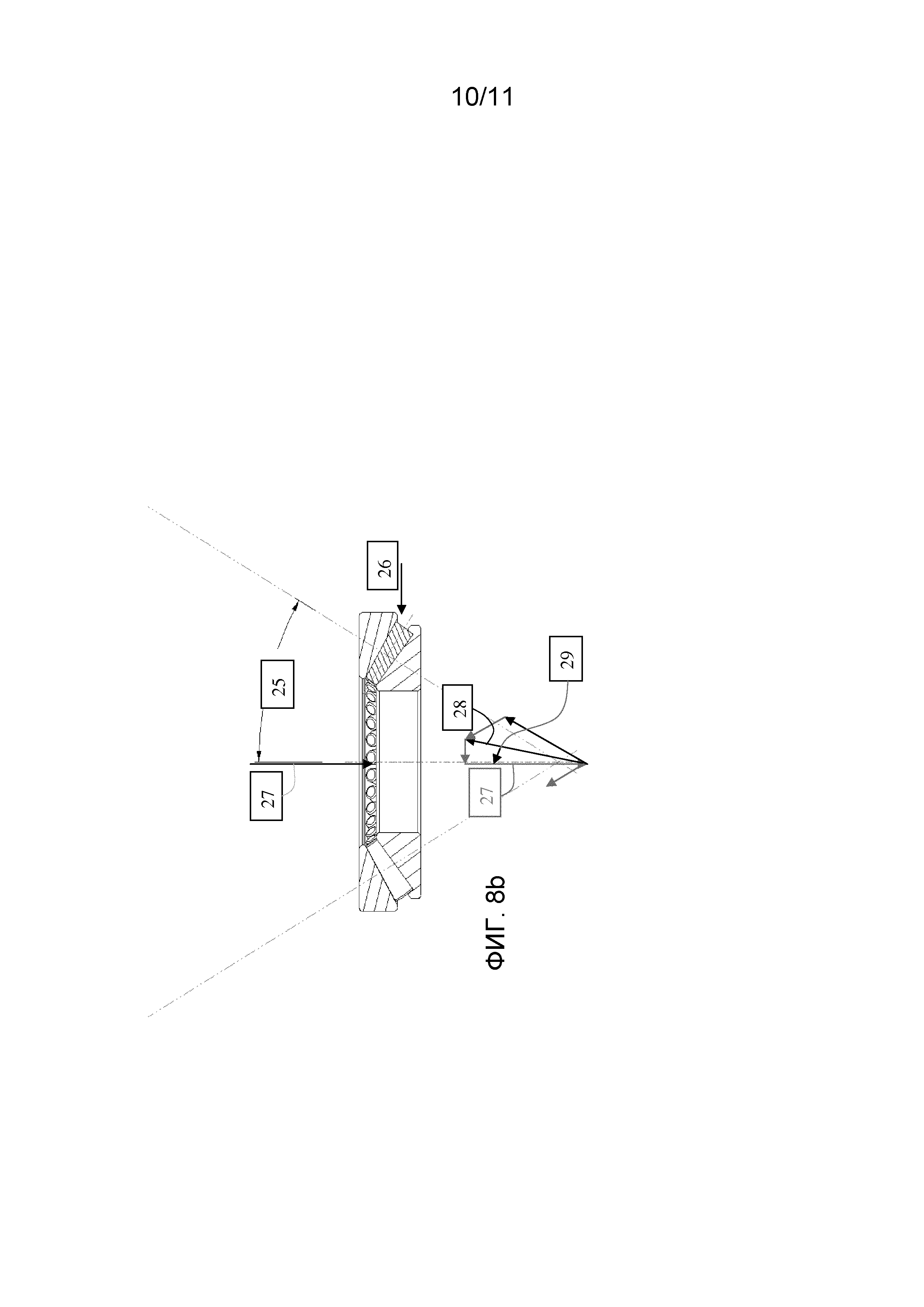
Фиг.8 - схематичный вид угла наклона конического подшипника.
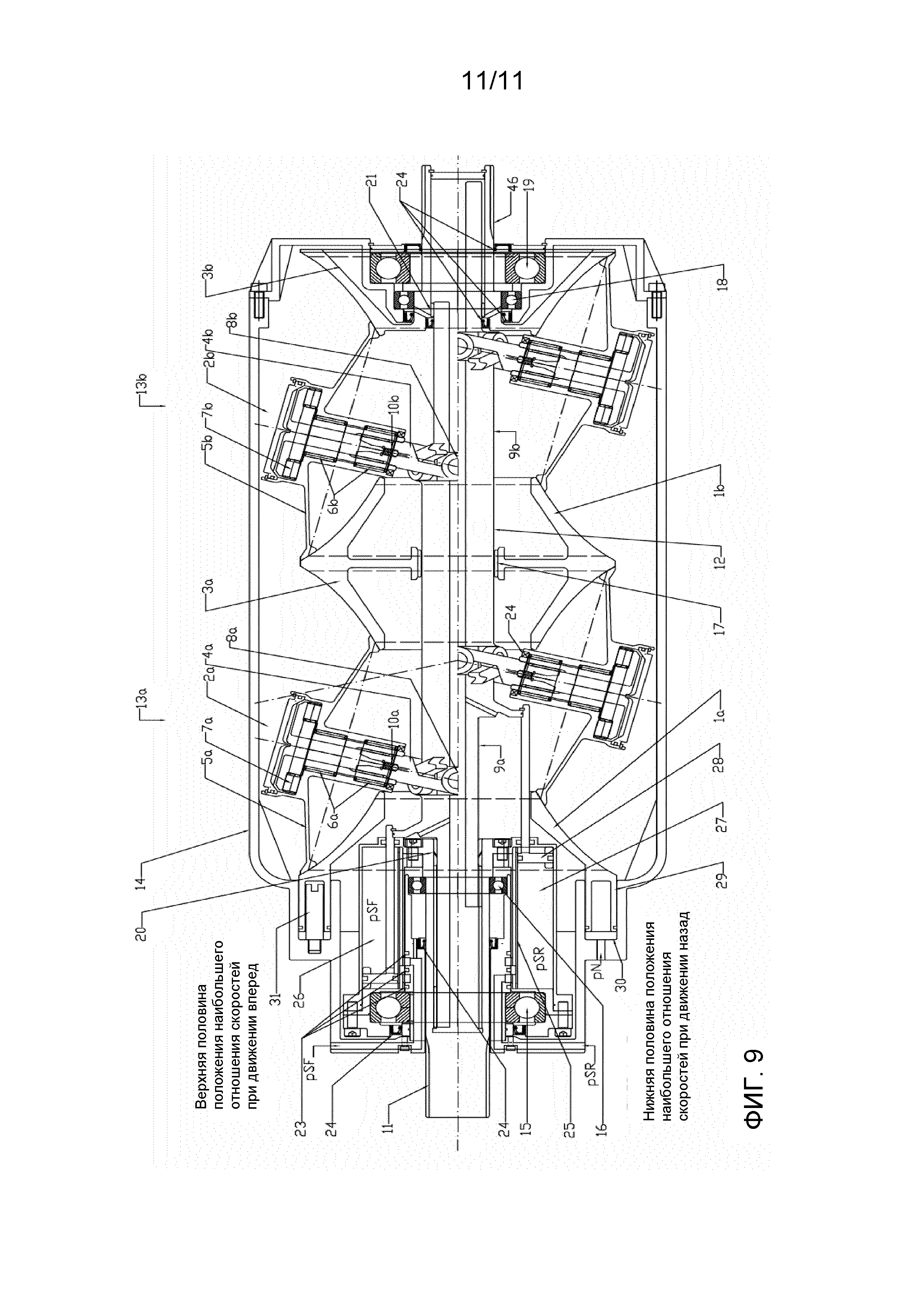
Фиг.9 - схематичный вид реверсивной переменной трансмиссии патентной заявки РСТ/EP2008/057009. Этот чертеж приведен в целом из патентной заявки PCT/EP2008/057009 с текстом и ссылочными позициями, первоначально изображенными в этой предыдущей патентной заявке, которая полностью включена сюда путем ссылки и со ссылочными позициями, указанными в перечне ссылочных позиций этой предыдущей патентной заявки, которую следует рассматривать как ограниченную только этой фигурой: круглое зубчатое колесо (1), сателлит (2), центральное зубчатое колесо (3), сателлитная вилка (4), сателлитное зубчатое колесо (5), радиальный подшипник (6) для сателлита, нажимной подшипник (7) для сателлита, шарнирный палец (8), центральный вал (9), клапан (10) сброса давления, входной вал (11), главный вал (12), планетарный вариатор (13), корпус (14), осевой подшипник (15) на входе, радиальный подшипник (16) на входе, центрально-круглое зубчатое колесо (17) с втулками, радиальный подшипник (18) на выходе, осевой подшипник (19) на выходе, входная втулка (20), выходная втулка (21), маслораспределительное устройство (22), поршневые кольца (23), манжетные уплотнения (24), уплотнительная трубка (25), цилиндр (26) рулевого управления прямого хода, цилиндр (27) рулевого управления обратного хода, поршень силы (28) рулевого управления, поршень (29) для предварительной нагрузки, цилиндр (30) для предварительной нагрузки, центровочный штифт (31), лопасти (32) для подачи масла, клапан (33), понижающий давление, для давления рулевого управления переднего хода (PSF с пропорциональным клапаном), клапан (34), понижающий давление, для давления рулевого управления обратного хода (PSR с пропорциональным клапаном), клапан (35), понижающий давление, для нормального давления (PN с пропорциональным клапаном), клапан (36) аварийного отключения для давления рулевого управления переднего хода, клапан (37) аварийного отключения для давления рулевого управления обратного хода, аккумулятор (38) низкого давления, аккумулятор (39) высокого давления, масляный насос (40), выключатель (41) гидравлического насоса, выключатель (42) гидравлической подачи, выключатель (43) гидравлического аккумулятора, датчики (44) давления, усилие (45) рулевого управления, выходной вал (46), устройство (47) передачи крутящего момента (а именно шлицевое соединение), круглая шестерня (48), сателлитная шестерня (49), водило (50) сателлитной шестерни, центральная шестерня (51), предварительная нагрузка (52), усилие (53) рулевого управления, индекс a: первичный планетарный вариатор, индекс b: вторичный планетарный вариатор.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение будет описано со ссылкой на конкретные варианты осуществления и со ссылкой на определенные чертежи, однако изобретение не ограничивается этим, а ограничивается только формулой изобретения. Описанные чертежи являются только схематичными, представлены для иллюстративных целей и не являются ограничивающими.
Настоящее изобретение будет описано в виде модификаций системы реверсивной переменной трансмиссии, которая показана схематично на фиг.9 и описана выше. Соответствующие части, упомянутые ниже с добавлением дополнительных новых признаков и признаков изобретения.
МОДИФИКАЦИИ РЕВЕРСИВНОЙ ПЕРЕМЕННОЙ ТРАНСМИССИИ
1. Регулирование сжимающего давления и защита от проскальзывания
Стратегия электронного регулирования сжимающего давления
Фиг.6 иллюстрирует сжимающий поршень (21), на который действует сжимающее давление для того, чтобы прижать все ведущие зубчатые колеса друг к другу, обеспечивая передачу крутящего момента за счет трения. Прикладывание сжимающего давления гораздо больше, чем это необходимо, увеличит только внутренние потери трансмиссии. Таким образом, важно, чтобы контроллер трансмиссии получал информацию об уровне крутящего момента таким образом, чтобы он мог вычислить необходимое сжимающее давление посредством модели трансмиссии.
В большинстве ситуаций, возникающих при движении, сжимающее давление можно вычислить из положения дроссельной заслонки и передаточного отношения. Для каждого положения дроссельной заслонки число оборотов идеального двигателя и соответствующий крутящий момент двигателя хранятся в памяти контроллера трансмиссии, причем число оборотов идеального двигателя и соответствующий крутящий момент двигателя также зависят от температуры двигателя, условий окружающего воздуха и динамических эффектов двигателя. С учетом входного крутящего момента и требуемого передаточного отношения и изменения этих значений из-за ускорений можно вычислить нормальную силу во всех контактных точках качения. После того, как эти данные станут известными, вычисляется необходимое сжимающее давление.
При очень низких отношениях скоростей (отношение скоростей равно отношению скорости на выходе трансмиссии, поделенному к скорости на входе трансмиссии) этот способ становится неточным. Предположим, что автомобиль ожидает очереди с отношением скоростей 0,01. Выходной крутящий момент трансмиссии имеет величину 15 Нм. Таким образом, входной крутящий момент в 100 раз меньше и имеет величину 0,15 Нм выше крутящего момента, необходимого для преодоления потерь и привода в движение вспомогательных устройств. Предположим, что автомобиль начинает движение на крутом подъеме, и выходной крутящий момент трансмиссии увеличивается до 75 Нм. Входной крутящий момент увеличивается только на 0,6 Нм. Это небольшое увеличение уровня крутящего момента не будет заметным среди различных уровней крутящего момента вспомогательных устройств, и контроллер трансмиссии не сможет вычислить оптимальное сжимающее давление.
Способ подачи вперед, упомянутый выше, можно улучшить путем измерения также выходного крутящего момента с помощью устройства измерения крутящего момента. После установки этого измерительного устройства, оно будет полезно не только при низких отношениях скоростей, но будет также обеспечивать более точную информацию о крутящем моменте при любом отношении скоростей. Будет также измеряться быстрая флуктуация крутящего момента из-за неровной дороги. Затем вычисляется входной крутящий момент с помощью известного отношения скоростей и путем добавления потерь трансмиссии, известных из модели трансмиссии.
Резкий скачок крутящего момента на выходе, например, вызванный препятствием на дороге, может вызвать проскальзывание в трансмиссия прежде, чем заметно снизится число оборотов двигателя, и, таким образом, прежде, чем контроллер трансмиссии знает о том, что крутящий момент увеличивается. При отсутствии устройства измерения выходного крутящего момента отклонение числа оборотов двигателя ниже желаемого числа оборотов представляет собой только способ обнаружения повышения крутящего момента. В этом случае число оборотов двигателя будет уменьшаться вместе со снижением скорости всего транспортного средства в результате резкого скачка крутящего момента. Реакция на действие резкого скачка крутящего момента появляется только позже, т.е. отсутствует ранее обнаружение сигнала обратной связи.
Во избежание более позднего определения постфактум, как описано выше, сигнал входного крутящего момента обратной связи также передается в контроллер трансмиссии наряду с сигналом входного крутящего момента при подаче вперед из модели двигателя, как описано выше.
Датчик положения измеряет положение поршня рулевого управления. Из модели трансмиссии теоретическое отношение скоростей без нагрузки можно вычислить для каждого положения поршня рулевого управления. Реальное проскальзывание рассчитывается из измеренного отношения скоростей и теоретического отношения скоростей без нагрузки. PID-контроллер будет регулировать вычисленное сжимающее давление при подаче вперед, чтобы поддерживать микропроскальзывание на своем оптимальном заданном значении (фиг.7b).
В итоге существует 2 или 3 сигнала, доступных для регулирования сжимающего давления:
входной крутящий момент из модели двигателя для подачи вперед;
вспомогательный входной крутящий момент из устройства измерения выходного крутящего момента для подачи вперед;
измеренное проскальзывание для подачи вперед.
Наибольшее значение из 2-х сигналов входного крутящего момента используется в качестве входного сигнала для модели определения сжимающего давления.
Аналогично использованию сигналов входного крутящего момента, модель трансмиссия может также использовать сигналы выходного крутящего момента на выходе. Посредством передаточного отношения и модели внутренних потерь трансмиссия выходной крутящий момент можно вычислить из входного крутящего момента.
На фиг.7 изображен вариант осуществления настоящего изобретения. Всякий раз при появлении резкого скачка крутящего момента на выходе, резко увеличивается микропроскальзывание трансмиссии, в то время как измеренное микропроскальзывание приведет к быстрому увеличению сжимающего давления, которое будет переориентировать микропроскальзывание на свое оптимальное значение.
Ход поршня рулевого управления является относительно длинным, поэтому его трудно обнаружить с помощью датчика положения, доступного на рынке. В качестве альтернативы, положение датчика можно установить на датчик сжатия, так как его ход намного короче. Когда направление движения известно - от запроса водителя – существует геометрическая связь между положением сжимающего поршня (21) и теоретического отношения скоростей без нагрузки.
Средство механического регулирования сжимающего давления с защитой от проскальзывания
Как описано выше, в качестве резервного средства для электронного регулирования сжимающего давления можно использовать дополнительное средство механического регулирования сжимающего давления с защитой от проскальзывания.
Выходной вал трансмиссии между вторичным центральным зубчатым колесом и осевым подшипником нагружен из-за осевой силы, вызванной сжимающим давлением, и нагружен вследствие кручения из-за переданного крутящего момента. При определенном диаметре вала максимальная тангенциальная сила от крутящего момента пропорциональна осевой силе. Когда крутящий момент будет превышать эту пропорциональность, трансмиссия будет проскальзывать. В вариантах осуществления настоящего изобретения это особенность превышения пропорциональности, которая относится к крутящему моменту, является интегрированной, обеспечивая механическую систему защиты от проскальзывания путем разделения выходного вала на вал (22) центрального зубчатого колеса и выходной вал (23) таким образом, чтобы оба вала подходили друг к другу по тангенциальным скосам (24), как показано на фиг.5. Скосы (24) расположены в зоне трансмиссии с возможностью смазки смазочным маслом для подшипников. Устройство механической защиты от проскальзывания служит в качестве предохранительного механизма и поэтому не предназначено для частого употребления. В результате, не требуются шарики или ролики между скосами, действующими как подшипник. Тангенс угла скосов соответствует зависимости между тангенциальной силой и осевой силой. Скосы (24) выполнены в обоих направлениях, чтобы защита от проскальзывания работала как вперед, так и назад.
По причинам изготовления гораздо удобнее сделать отдельное кольцо, содержащее скосы (24) и затем установить это кольцо внутри выходного вала (23). Существует много традиционных способов избежать того, чтобы кольцо со скосами (24) проворачивалось внутри выходного вала (23), несколько примеров которого можно привести. Возможными вариантами могут быть, например, установка кольца с помощью болтов или размещение кулачков по наружному диаметру кольца, которые вставляются в прорези на выходном валу (23), или использование шлицевого соединения.
Когда сжимающее давление является слишком низким для прикладывания крутящего момента в вариантах осуществления настоящего изобретения со ссылкой на фиг.5, скосы (24) начнут скользить друг по другу, и они будут толкать вал (22) вторичного центрального зубчатого колеса в направлении сжимающего поршня (21). Гидравлическое масло будет выдавливаться из сжимающего цилиндра через управляющий соленоид. В портах этого соленоида будут возникать гидродинамические силы, поэтому давление внутри сжимающего цилиндра будет увеличиваться прежде, чем сможет реагировать электронная система регулирования. Повышенное сжимающее давление будет противодействовать первоначальному проскальзыванию, и предотвращать дополнительные отсоединения механической системы защиты от проскальзывания. После того, как контроллер измерит незапрашиваемое увеличение сжимающего давления вместе с изменением незапрашиваемого передаточного отношения, известно, что механическая система защиты от проскальзывания приводится в действие, и сжимающее давление будет регулироваться во избежание макропроскальзывания.
ЗАЩИТА ОТ ПРОСКАЛЬЗЫВАНИЯ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ПО ИНЕРЦИИ
В качестве окончательной защиты, выполненной в вариантах осуществления настоящего изобретения, как впрыск топлива в двигатель, так и сжимающее давление сразу устанавливаются в нуль всякий раз, когда максимальное значение крутящего момента превышает несущую способность по крутящему моменту трансмиссии. Транспортное средство будет двигаться по инерции в течение очень короткого периода времени, в течение которого защита остается активной. Состояние перегрузки обнаруживается тогда, когда требуемое сжимающее давление превышает расчетный предел.
Варианты осуществления настоящего изобретения, содержащие системы защиты от проскальзывания, описанные выше, будут не только защитить трансмиссию от повреждений, но их основная задача состоит в том, чтобы обеспечить привод с уровнем сжимающего давления при пониженном запасе прочности.
2. ПОРШЕНЬ РУЛЕВОГО УПРАВЛЕНИЯ
Со ссылкой на варианты изобретения будет описано встраивание системы цилиндра рулевого управления в корпус трансмиссии со ссылкой на фиг.1 и фиг.6.
Главный вал (5) смещается аксиально с помощью осевого подшипника (4) или, в частности, с помощью 4-точечного радиально-упорного подшипника. Это осевой подшипник (4) управляется с помощью стационарного сжимающего поршня (3) двухстороннего действия. Гидравлическое давление имеет прямое соединение с гидравлическим блоком регулирования. Гидравлические каналы являются короткими и широкими, что обеспечивает высокий расход с очень низким падением давления для выполнения быстрых изменений отношения. Осевой подшипник (4) подвергается тем же самым силам и скоростям, как и в конструкции патентной заявки PCT/EP2008/057009 и, следовательно, больше не нагружается.
По сравнению с конструкцией, описанной в патентной заявке РСТ/EP2008/057009, гидравлическое давление в настоящем изобретении не должно больше передаваться из стационарного корпуса во вращающийся поршень. Поэтому в вариантах осуществления настоящего изобретения поршневые кольца устранены и, следовательно, почти полностью устраняется утечка масла. Трансмиссия может работать в течение длительного времени при одинаковом отношении, в то время как давление для гидравлического блока регулирования подается из аккумулятора без насоса, потребляющего мощность.
Варианты осуществления настоящего изобретения содержат меньшее количество компонентов по сравнению с системой поршня рулевого управления, тем самым уменьшая стоимость и сложность сборки. Кроме того, инерция входного вала (1) значительно снижена по сравнению с патентной заявкой PCT/EP2008/057009.
3. НАСТРОЙКА САТЕЛЛИТОВ
Варианты осуществления настоящего изобретения обеспечивают конструкцию с механизмом непрерывной настройки осевого расстояния от рабочей поверхности (16) сателлитного зубчатого колеса до оси (17) шарнира сателлитной вилки (11). Этот механизм настройки компенсирует различия по размерам среди сателлитов, вызванное наличием существующими и неизбежно возникающими при изготовлении допусками в компонентах сателлитов. С помощью механизма настройки все сателлиты ограничены одними и теми же геометрическими размерами тела качения, что необходимо для защиты системы от нежелательного создаваемого различия в передаточном отношении, уменьшенной несущей способности крутящего момента, меньшей эффективности и дисбаланса, который зачастую вызывает вибрации.
Практическая реализация показана на фиг.2 и фиг.4. Вал (12) сателлита с подшипниками, ступица (9) сателлита и сателлитное зубчатое колесо (16) прикручиваются к сателлитной вилке (11) вплоть до механического ограничителя хода калибра (20), обеспечивая точное расстояние от оси (17) шарнира до рабочей поверхности (16) сателлитного зубчатого колеса. Положение настройки можно зафиксировать, в результате чего эта фиксация обеспечивается путем подтягивания стопорного винта (13) к сателлитной вилке (11). Настройка гарантирует, что вершина теоретического конуса относительно конической рабочей поверхности (16) сателлитного зубчатого колеса совпадает с осью (17) шарнира сателлитной вилки (11) при заданной нагрузке.
4. ФОРМА САТЕЛЛИТНЫХ ЗУБЧАТЫХ КОЛЕС
В вариантах осуществления настоящего изобретения сателлитные зубчатые колеса выполнены таким образом, чтобы они оказывали сопротивление высоким нормальным силам, создаваемым в контактной зоне с помощью круглого зубчатого колеса и центрального зубчатого колеса для того, чтобы передавать тягу независимо от переданных тангенциальных сил, которые возникают в результате тяги в упомянутой контактной зоне. Значение нормальных сил зависит от размера трансмиссии и от переданного крутящего момента, но для показанного примера они могут достигать, например, приблизительно 30 кН. Зависимость тяговых сил от нормальных сил ограничивается коэффициентом трения системы. Чем больше нормальные силы, тем можно передать больший крутящий момент.
Как описано со ссылкой на фиг.2, варианты осуществления настоящего изобретения имеют сателлитное зубчатое колесо (6), содержащее двухсторонний кожух, то есть верхний кожух (7) сателлита и нижний кожух (8) сателлита. Верхний кожух (7) сателлита находится под действием только сдавливающих напряжений, а несгибающих напряжений, возникающих из-за нормальных сил, в то время как нижний кожух (8) сателлита находится под действием только сжимающих и растягивающих напряжений, возникающих из-за тангенциальных сил. В результате, при двухстороннем кожухе сателлитного зубчатого колеса напряжения и деформации уменьшаются, что приводит к более тонкой и более легкой конструкции по сравнению с сателлитным зубчатым колесом патентной заявки PCT/EP2008/057009, как показано на фиг.9. Благодаря этому уменьшению массы, одновременно с этим была снижена инерция.
Варианты осуществления настоящего изобретения, содержащие сателлитное зубчатое колесо с двухсторонним кожухом, обеспечивают устранение изгибающих напряжений в сателлитном зубчатом колесе. Со ссылкой на фиг.2 деталь А, векторы нормальных сил совпадают с верхним нейтральным волокном (18) верхнего кожуха (7) сателлита, в то время как векторы тангенциальных сил лежат в той же самой плоскости, как и нижний нейтральный вектор (19) нижнего кожуха (8) сателлита.
Как показано на фиг.2 деталь А, верхний кожух (7) сателлита и нижний кожух (8) сателлита имеют треугольное поперечное сечение, обеспечивающее достаточную жесткость для поперечных сил, действующих по касательной к контактной зоне и в плоскости поперечного сечения, показанной на фиг.2, которые становятся значительными при быстрых изменениях отношения. В качестве примера, во время ускорения автомобиля изменяется отношение скоростей, например, при скоростях ниже 0,5 Гц, поперечные силы остаются пренебрежимо малыми (10–500 Н по сравнению с нормальной силой, равной приблизительно 20 кН), но во время перехода на низшую передачу поперечные силы могут увеличиться до приблизительно 1000 Н, и, следовательно, отношение скоростей может изменить со скоростью вплоть до 5 Гц.
Оптимизация конструкции посредством численных расчетов на прочность с учетом, например, центробежных сил и гироскопических моментов, может привести к небольшому смещению верхнего нейтрального волокна (18) и нижнего нейтрального волокна (19) по отношению к описанному принципу за счет переустановки верхнего или нижнего кожуха сателлита относительно контактной зоны.
5. КРЫШКА САТЕЛЛИТА
Как показано на фиг.2, варианты осуществления настоящего изобретения обеспечивают сателлиты с крышкой (10) сателлита, установленной в ступице (9) сателлита без зазора, чтобы избежать деформации ступицы (9) сателлита и сателлитного зубчатого колеса (6). Без крышки (10) сателлита круглый край ступицы (9) сателлита будет деформироваться до эллиптической формы вследствие нормальных сил, которые передаются с помощью верхнего кожуха (7) сателлита на верхний край ступицы (9) сателлита.
Крышка (10) сателлита по существу выполнена в виде плоского диска с коническим краем. Радиальные силы, действующие на сторону крышки (10) сателлита не создают каких-либо изгибающих напряжений, приводящих к минимальной деформации. Плоскость крышки (10) сателлита устанавливается близко к опорной плоскости верхнего кожуха (7) сателлита в пределах ступицы (9) сателлита.
Фиг.2 иллюстрирует по отношению к вариантам осуществления настоящего изобретения то, как крышку (10) сателлита можно установить без зазора внутри ступицы (9) сателлита. Боковая стенка наружного края крышки (10) сателлита является конической и размещается внутри ступицы (9) сателлита под одним и тем же коническим углом. Все зазоры и возможные относительные перемещения устранены, так как крышка (10) сателлита привинчена внутри ступицы (9) сателлита. Следовательно, контактное напряжение на конической поверхности прикладывается под наклоном. Альтернативный способ установки крышки (10) сателлита без зазора представляет собой, например, известную прессовую посадку, которая известна, например, из установки коробок передач на валы.
Окончательная форма крышки (10) сателлита может слегка отличаться от конструкции плоского диска, чтобы компенсировать дополнительные напряжения, возникающие из-за центробежных сил.
Так как крышка (10) сателлита находится под нагрузкой только за счет сжимающих усилий, можно выбрать легкий материал, такой как алюминий, для конструкции крышки (10) сателлита, при этом сохраняя требуемую жесткость.
6. ПОДШИПНИКИ САТЕЛЛИТНОГО ЗУБЧАТОГО КОЛЕСА
Высокие осевые силы действуют на подшипники сателлитов. Кроме того, эти подшипники также нагружены вследствие радиальных сил. Как описано в патентной заявке РСТ/EP2008/057009, радиальные подшипники, которые показаны также на фиг.9, подвергаются действию радиальных сил. Более простое и более эффективное размещение подшипников можно применить для того, чтобы справиться с конкретными нагрузками сателлитных зубчатых колес.
Из-за коэффициента трения ведущих зубчатых колес отношение радиальной силы к осевой не может превышать определенного предельного значения. Варианты осуществления настоящего изобретения используют преимущество этого свойства, обеспечивая компактную конструкцию подшипников в сателлитах, где один единственный конический подшипник (14) принимает на себя как осевую (27), так и часть радиальной нагрузки (26). Во время работы трансмиссия или планетарный вариатор всегда нагружены осевыми силами (27). Оставшуюся часть радиальной нагрузки получает дополнительный радиальный подшипник (15), как показано на фиг.2.
Угол наклона наружного кольца конического подшипника (14) обычно выбирается таким, чтобы он более эффективно выдерживал результирующую силу. На фиг.8a и b схематично показана результирующая силы (28) осевой и радиальных сил, действующих на наружное кольцо подшипника. Нормаль на поверхности качения наружного кольца подшипника изображена штрихпунктирной линией.
Угол наклона нормали в зависимости от осевой нагрузки (27), изображенный поз.(25) на фиг.8, выбран гораздо меньше, по сравнению со стандартным подшипником, но этот угол должен оставаться более высоким, чем угол результирующей силы (28) в зависимости от осевой нагрузки (27), изображенной углом (29) на фиг.8. В зависимости от конструкции и коэффициента трения угол результирующей силы (28) в зависимости от осевой нагрузки (27), изображенной углом (29), никогда не превышает 10°–25°. Угол наклона нормали в зависимости от осевой нагрузки стандартного конического подшипника обычно больше, чем 60°, но для углов наклона настоящей заявки нормали в зависимости от осевой нагрузки (27), показанной поз. (25), можно выбрать между 20° и 50°. Таким образом, можно уменьшить размер подшипника и конический подшипник остается стабильным.
Осевые сферические роликовые подшипники имеют геометрию, аналогичную коническому роликовому подшипнику с малым углом наклона, и они продаются как стандартное изделие. Их можно использовать для замены конического подшипника.
Варианты осуществления настоящего изобретения, содержащие конфигурацию подшипника, как описано выше, выполнены с помощью конического подшипника (14) и радиального подшипника (15), что приводит к более компактной и менее дорогостоящей конструкции подшипника по сравнению с конструкцией подшипника патентной заявки РСТ/EP2008/057009. Требования к точности и прочности компонентов являются менее жесткими, так как иглы или ролики больше не работают непосредственно с компонентами.
7. НОЖКИ САТЕЛЛИТНОЙ ВИЛКИ
Во многих приложениях трансмиссии наибольшая часть движения происходит вперед. Следовательно, срок эксплуатации материала сателлитной вилки во многом определяется напряжениями во время движения вперед. Во всех отношениях при движении вперед изгибающие моменты в сателлитной вилке проявляются при одном и том же направлении движения. В результате, одна ножка сателлитной вилки будет подвергаться гораздо большей нагрузке, чем другая ножка сателлитной вилки.
В конструкции планетарного вариатора необходимо избежать либо помех среди сателлитных вилок, либо помех среди сателлитной вилки и круглого зубчатого колеса и центрального зубчатого колеса. Сателлитная вилка с симметричными ножками, как описано в конструкции планетарного вариатора в патентной заявке РСТ/EP2008/057009, не использует достаточно эффективное пространство, поэтому прочность вилок не оптимизируется в пределах пространственных ограничений. Вводя новую асимметричную конструкцию, содержащую две неодинаковые ножки, как описано дополнительно ниже, планетарный вариатор может передавать больший крутящий момент при указанных условиях применения.
Как показано на фиг.3, варианты осуществления настоящего изобретения обеспечивают надежную и компактную конструкцию сателлитной вилки (11) за счет регулировки ножки, подверженной наибольшей нагрузке, до немного более толстого компонента, в то время как конструкция ножки, подверженное наименьшей нагрузке, видоизменяется до немного более тонкого компонента. Симметрия в сателлитной вилке (11) больше не сохраняется. Таким образом, увеличивается передаваемый крутящий момент, тогда как общие размеры остаются одинаковыми.
ОБЛАСТИ ПРИМЕНЕНИЯ
Эта трансмиссия сконструирована для пассажирских автомобилей, но ее применение может быть распространено на:
машины для грузовых перевозок: где требуется множество отношений, низкие и высокие отношения, вместе с высокой эффективностью. У мусоровозов больше не будет изнашиваться сцепление, и привод будет гораздо более эффективным.
Городские автобусы будут ездить гораздо более эффективно из-за частых троганий без проскальзывания сцеплений или проскальзывания преобразователя крутящего момента. При этом отсутствует необходимость увеличения числа оборотов двигателя для начала движения автобуса, так как крутящий момент двигателя является крайне низким из-за неограниченного умножения крутящего момента на низкой скорости.
Внедорожные транспортные средства:
- применения, в которых ползучая скорость и хорошая эффективность при низкой скорости вращения является важной, такие как большие сенокосилки;
- подъемно-транспортные тележки, которые нуждаются в плавной маневроспособности при низкой скорости вращения как в обоих направлениях движения, так и в относительно быстром реверсе (сравнимом со второй передней передачей);
- технику, подобную манипуляторам с телескопической штангой, где низкая скорость вращения должна быть регулируемой независимо от изменения сопротивления грунта:
системы рекуперации кинетической энергии (известные как KERS) могут передавать мощность между маховым колесом и двигателем без какого-либо скользящего компонента. В то же время транспортное средство приводится в движение также связанных файлов.
ветряные двигатели, в которых "выход" трансмиссии подсоединен к очень медленному вращательному движителю, а "вход" приводит в действие генератор.
в других областях промышленного применения, где используется привод с изменяемыми скоростями.
Реферат
Группа изобретений относится к планетарным вариаторам. Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий, выполнен с возможностью выдерживать сжимающее давление типично в пределах, но этим не ограничиваясь, в диапазоне от 20 до 150 бар. Вариатор содержит круглое зубчатое колесо, два или более сателлитов, установленных вокруг центрального вала, и центральное зубчатое колесо таким образом, что круглое зубчатое колесо, центральный вал и центральное зубчатое колесо образуют зону взаимодействия с другими трансмиссионными компонентами. Каждый сателлит содержит сателлитное зубчатое колесо, движущееся по рабочей поверхности упомянутого центрального или круглого зубчатого колеса, и сателлитную вилку, подсоединяющую сателлит к упомянутому центральному валу. Непрерывная или периодическая система регулирования интегрирована в сборный узел каждого сателлита для обеспечения того, чтобы вершина конуса, образованная теоретической, не заканчивающей собою верхнюю часть, рабочей поверхностью сателлитного зубчатого колеса, точно совпадала с осью шарнира сателлитной вилки при прикладывании определенной нагрузки на рабочую поверхность. Также заявлены трансмиссия, содержащая данный вариатор, и применение трансмиссии или вариатора машиностроении и промышленности. Обеспечивается улучшение эксплуатационных характеристик планетарного вариатора. 3 н. и 6 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Вариатор для бесступенчатой коробки передач с передачей усилия роликами по тороидальным беговым поверхностям
Комментарии