Приводное средство и цепной привод - RU2438054C1
Код документа: RU2438054C1
Чертежи



Описание
Изобретение относится к приводному средству для привода звездочки с компенсацией эффекта многоугольника в соответствии с ограничительной частью п.1 и к цепному приводу в соответствии с ограничительной частью п.18 формулы.
Для пояснения терминов «эффект многоугольника» и «компенсация эффекта многоугольника» необходимо, прежде всего, учесть следующее.
На фиг.1 схематично показаны шарнирная цепь G и частично обвитая ею звездочка R. Шарнирная цепь G содержит шарнирно соединенные между собой звенья К, шарнирно соединенные между собой посредством центра Р вращения. Представленная в качестве примера звездочка R имеет 8 зубьев Z, между которыми расположены промежутки, в которые могут входить центры Р вращения. В данном примере угол τ шага между двумя зубьями или промежутками между ними составляет 45°.
Далее на фиг.1 на нижней стороне звездочки обозначен угол φ захода, который может быть образован, например, отклоняющей шарнирную цепь G направляющей. Угол φ измеряется между фактическим направлением выхода шарнирной цепи G и перпендикуляром S к линии, соединяющей точку А отделения шарнирной цепи G от звездочки R и ось D вращения последней. В данном примере угол φ составляет около 11°.
На фиг.1 обозначен угол υ обвива в данный момент, который соответствует огибающему углу между двумя точками А отделения шарнирной цепи G от звездочки R и в данном случае равен 180°. Когда звено К приподнимается от звездочки R, угол υ обвива в данный момент резко уменьшается, поскольку при разных углах φ вверху и внизу, например, на верхней стороне одно звено К приподнимается, однако в то же время на нижней стороне следующее звено К еще не прилегает. Поэтому ниже следует исходить из среднего угла υ обвива, который больше или равен минимальному углу обвива и меньше или равен максимальному углу обвива.
Далее на верхней стороне звездочки R обозначено эффективное плечо Heff рычага, которое соответствует вертикальному расстоянию между активной линией W усилия, в частности тягового усилия, шарнирной цепи G и осью D вращения звездочки R. Как и угол υ обвива в данный момент, эффективное плечо Heff' рычага также колеблется во время движения вокруг звездочки шарнирной цепи вследствие ее позвенного отделения, в частности вследствие многоугольного (четырехугольного) прилегания цепи. На нижней стороне звездочки R эффективное плечо Heff' рычага немного меньше, поскольку из-за немного опрокинутой активной линии W усилия шарнирной цепи G эффективное плечо Heff рычага больше не проходит через точку А отделения.
По этой причине возникают следующие недостатки технического использования такой звездочки.
В эскалаторах и траволаторах соответственно их ступени и платформы, в частности с обеих сторон, приводятся в движение транспортными цепями, выполненными в виде так называемых цепей ступеней и цепей платформ. Обычно транспортные цепи имеют на каждую ступень три или четыре разъема, т.е. также три или четыре шарнира. Используемые звездочки имеют 16-25 зубьев. Это относительно большое число выбрано для минимизации так называемого эффекта многоугольника.
Эффект многоугольника возникает в результате колебаний эффективного плеча Heffрычага (фиг.1). Обычно звездочки приводятся в действие с постоянной угловой скоростью. За счет колебаний эффективных плеч рычагов колеблется скорость цепей ступеней, за счет постоянных ускорения и замедления подвижных масс (цепи, оси, ступени) возникают инерционные силы, которые в виде мешающих сил и крутящих моментов вводятся соответственно в цепи ступеней/платформ и привод и вызывают там сокращение срока службы или являются такого порядка, который следует учитывать при расчете, в частности, компонентов привода. Кроме того, подвижные части эскалатора вместе с окружающей стальной конструкцией представляют собой колебательную систему пружина-масса. В частности, здесь цепи следует рассматривать в качестве пружин, а ступени, оси (если имеются), ролики, перевозимых людей (на ступенях или платформах) и снова цепи - в качестве масс. В зависимости от параметров эта система пружина-масса может иметь очень неблагоприятные рабочие точки в зависимости от числа зубьев звездочек, скорости движения и загрузки.
Для уменьшения эффекта многоугольника в уровне техники предложены меры по компенсации многоугольника.
На практике это осуществляется, например, за счет уменьшения шага цепи и увеличения числа зубьев. С уменьшением шага и увеличением числа зубьев эффект многоугольника уменьшается, пока не будет достигнут размер, при котором эффект многоугольника на практике настолько мал, т.е. движение цепей/ступеней/платформ настолько равномерное, что эффект многоугольника практически больше не мешает, однако все еще существует.
Также в зоне звездочек устанавливались направляющие, которые вызывают тангенциальный заход цепи на звездочки. Основной целью этой меры является уменьшение шума при заходе цепи на звездочки. При этом также уменьшается, однако не компенсируется эффект многоугольника.
Традиционная конструкция относительно небольшим шагом цепи и относительно большим числом зубьев звездочки имеет, однако, существенные недостатки.
Прежде всего, следует отметить высокие расходы на цепь ступени/платформы. Чем больше разъемов имеет цепь, тем больше шарниров или роликов требуется на каждую ступень или каждый метр и тем выше расходы на них. Кроме того, на каждую ступень/платформу приходится большое число подверженных износу мест. В течение срока эксплуатации эскалатора как можно более длительное соблюдение максимально допустимого зазора между ступенями/платформами является очень важным критерием. Будучи обусловлены большим числом зубьев, звездочки имеют относительно большой диаметр и требуют большого конструктивного пространства, в частности для приводной станции. В результате в зданиях теряется драгоценное пространство. Из-за больших диаметров требуются высокие приводные моменты, что приводит к соответствующим расходам на приводы.
Из уровня техники известны некоторые другие меры по компенсации эффекта многоугольника.
Из WO 03/036129 А1 известны приводы, способные приводить в действие цепи с компенсацией эффекта многоугольника. Это значит, что привод ведущей звездочки с изменяемой угловой скоростью функционирует таким образом, что приводимая звездочкой цепь движется с постоянной или почти постоянной скоростью. Часть этих цепных приводов с компенсацией эффекта многоугольника функционирует по принципу периодического изменения эффективной длины ведущей ветви.
В DE 102006036353.1 А1 описан эскалатор, который при использовании привода с компенсацией эффекта многоугольника позволяет приводить в действие цепь ступени/эскалаторную цепь с увеличенным шагом и звездочки с уменьшенным числом зубьев. В частности, шаг цепи составляет здесь 50% и 100% шага ступеней.
Однако на практике, кроме того, существует требование реверсивного привода транспортеров или эскалаторов/траволаторов, т.е. они должны двигаться вперед и назад. Для этого требуется реверсивный цепной привод, в частности реверсивное приводное средство, которое может приводить в движение, например, эскалатор с постоянной или почти постоянной скоростью вперед и назад. Известные из уровня техники меры по компенсации эффекта многоугольника для этого использовать нельзя, поскольку они всегда рассчитаны на одно направление движения.
Для компенсации эффекта многоугольника в связи с реверсивным цепным приводом в уровне техники уже предлагались решения.
Как описано в DE 102006036353.1 А1, при расчете цепных приводов или транспортеров следует также обратить внимание на зависимость числа зубьев звездочки транспортной цепи от угла υ обвива. Эффективные плечи Heff, Heff' рычагов звездочки в верхней и нижней ветвях цепного привода в любой момент времени или во всех угловых положениях должны быть, в основном, идентичны.
Следовательно, компенсационная характеристика приводного средства должна быть симметричной. Имеется в виду, что если эффективный радиус компенсационного колеса в верхней ветви максимальный, то должен быть максимальным также эффективный радиус в нижней ветви и наоборот. При неподвижном расположении компенсационных колес это означает, что тяговое усилие цепи в холостой ветви очень сильно колеблется. В WO 03/036129 А1 предпринята попытка за счет натяжения пружин сделать равномерным тяговое усилие или, по меньшей мере, не дать ему упасть ниже определенного минимального значения. Следовательно, дополнительно требуются эти пружины. Это означает, прежде всего, увеличение расходов. Далее пружина должна опираться в неподвижной точке. Создание такой точки опоры также означает увеличение затрат/расходов. Кроме того, далеко не во всех случаях в распоряжении имеется необходимое для этого конструктивное пространство. В случае поломки пружины дополнительно возникает проблема, связанная с тем, что тяговое усилие в холостой ветви падает недопустимо сильно, т.е. ставится под сомнение прочность.
В любом случае движение выполненного на этой основе привода сопровождается относительно сильными трансверсальными движениями соответствующей холостой ветви. При неблагоприятных эксплуатационных параметрах в этих ветвях могут возбуждаться колебания, отчего может страдать плавность хода транспортера/эскалатора. Из-за большого числа изгибов качающихся рычагов (от звена к звену транспортной цепи) опоры могут относительно быстро износиться и стать причиной мешающих шумов.
Задача изобретения заключается в создании приводного средства, которое подходило бы для приведения во вращение звездочки цепного привода таким образом, чтобы компенсация эффекта многоугольника могла происходить как в первом, так и во втором, противоположном направлениях вращения.
Согласно изобретению, эта задача решается с помощью приводного средства, охарактеризованного отличительными признаками п.1 формулы.
Предложенное приводное средство обеспечивает компенсацию эффекта многоугольника в обоих направлениях движения, а именно особенно простым и очень предпочтительным образом. Два некруглых компенсационных колеса устанавливаются на общем коромысле. Последнее закреплено с возможностью поворота на неподвижной цапфе. В зависимости от направления вращения приводного двигателя или в зависимости от направления крутящего момента коромысло поворачивается в соответствующее положение. Это происходит совершенно самопроизвольно за счет составляющей тягового усилия ведущей ветви. Расстояние под прямым углом от точки зацепления компенсационного колеса до центра цапфы образует соответствующее плечо рычага. Произведение составляющей усилия и плеча рычага дает крутящий момент, который вызывает поворот коромысла. Теоретически коромысло поворачивается до тех пор, пока плечо рычага не станет нулевым или пока сумма правовращательных моментов не будет равна сумме левовращательных моментов. В этом случае холостая ветвь натягивается практически ведущей ветвью. Благодаря этой взаимосвязи возникают пропорциональные соотношения усилий в холостой и ведущей ветвях. Это значит, что холостая ветвь натягивается в зависимости от нагрузки или крутящего момента. Это оптимально для небольшого износа тягового органа и его колес. К тому же это устройство дает возможность уравнять в определенных пределах износ тягового органа и связанное с этим изменение длины.
Поскольку поворот коромысла происходит самопроизвольно, не требуется никакого гидравлического, электрического, пневматического или каким-либо иным образом управляемого или приводимого в действие блока перемещения и т.п. Здесь не требуется также описанных в WO 03/036129 А1 пружин, что делает привод более простым, более невосприимчивым и менее дорогостоящим.
Предпочтительные варианты предложенного приводного средства охарактеризованы признаками зависимых пунктов формулы. Особенно предпочтительные варианты следующие.
Место опоры цапфа/коромысло выполняется преимущественно не обслуживаемым с запрессованными подшипниками скольжения из металла или полимерного материала, например пластика. В частности, подшипники скольжения из полимерного материала дают то дополнительное преимущество, что они уменьшают или изолируют колебания и уменьшают шумы. Возможны также подшипники качения.
Могут быть предусмотрены такие применения, когда положение компенсационного колеса в ведущей ветви должно быть определено абсолютно, чтобы, например, максимально приблизиться к идеальному компенсационному действию. Здесь максимальное отклонение коромысла ограничено за счет устройства ограничения угла поворота, в частности, по меньшей мере, одного упора, по меньшей мере, одинарного действия. Преимущественно используется упор двойного действия. Ограничение за счет упора дает также то преимущество, что вокруг цапфы не возникает возможных микродвижений коромысла и предотвращается вызванная ими коррозия припасовки места опоры цапфа/коромысло.
Другая задача изобретения заключается в создании цепного привода с компенсацией эффекта многоугольника, который обладал бы компенсирующими эффект многоугольника свойствами в первом и втором направлениях вращения.
Согласно изобретению, эта задача решается посредством цепного привода с отличительными признаками п.18 формулы.
Предпочтительные варианты предложенного цепного привода охарактеризованы признаками зависимых пунктов формулы.
Другие особенности и преимущества изобретения поясняются с помощью нижеследующего описания предпочтительных примеров его осуществления со ссылкой на прилагаемые чертежи, на которых представлено следующее:
фиг.1 - звездочка для пояснения эффекта многоугольника, схематично;
фиг.2 - приводное средство в первом направлении движения тягового органа (обозначено стрелками) с компенсационными колесами в первом положении вращения (β11=0°; β21=0°) и коромыслом также в первом положении, схематично;
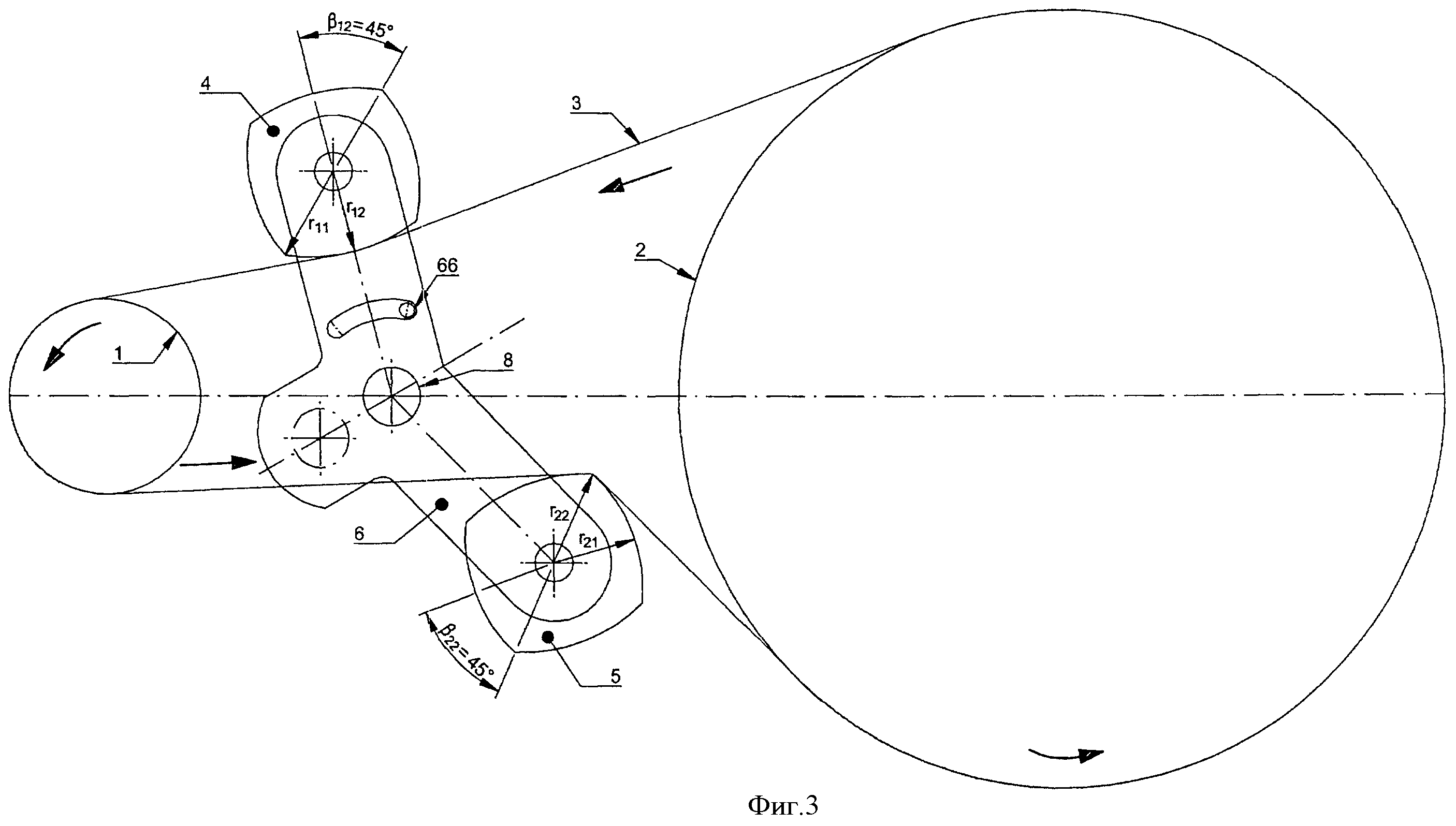
фиг.3 - приводное средство в первом направлении движения тягового органа с компенсационными колесами во втором положении вращения (β12=45°; β22=45°) и коромыслом также в первом положении, схематично;
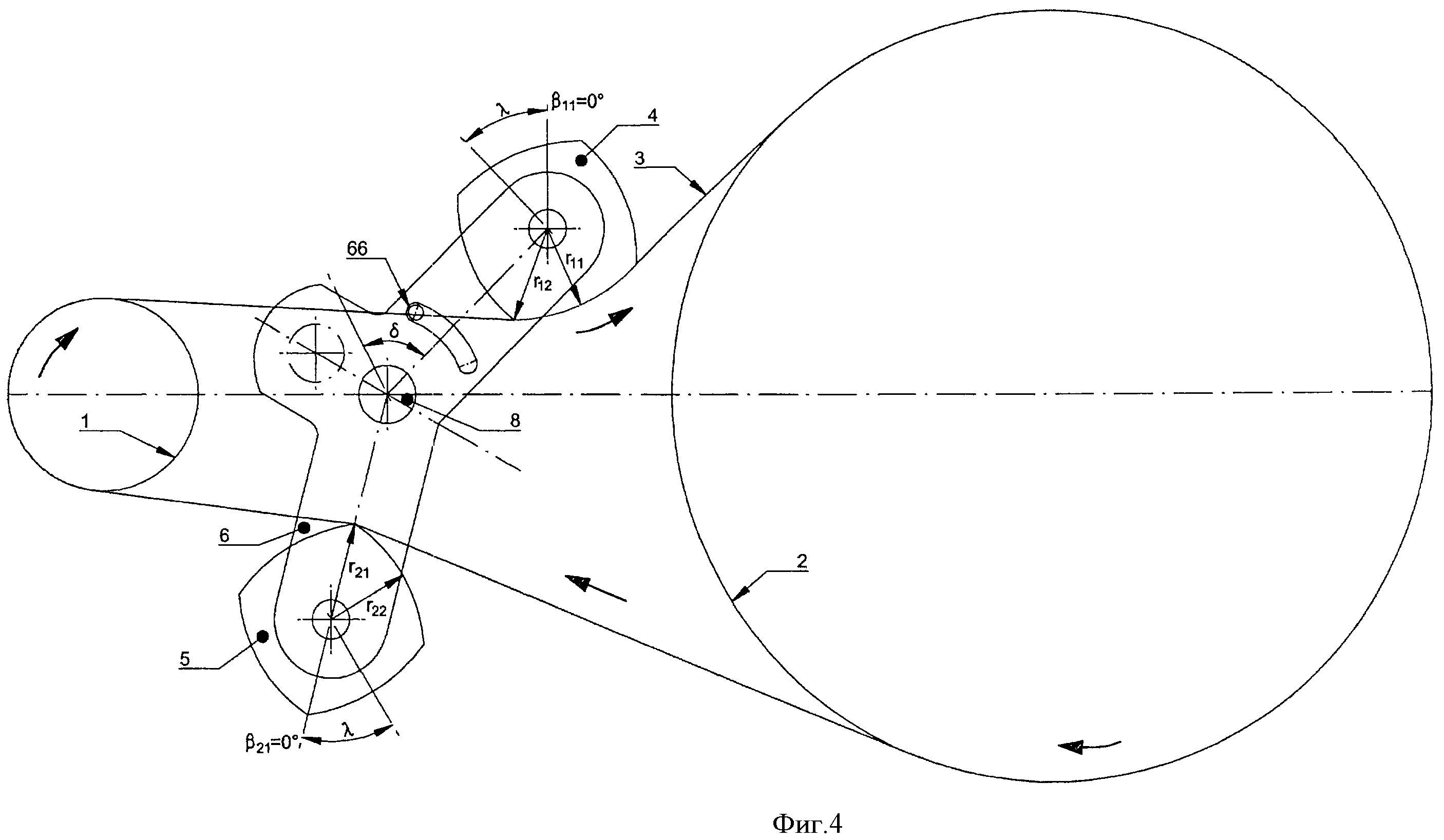
фиг.4 - приводное средство во втором, противоположном движению тягового органа с компенсационными колесами в первом положении вращения (β11=0°; β21=0°) с учетом угла λ проворачивания компенсационных колес и коромыслом также во втором положении (поворот на угол δ относительно положения на фиг.2 и 3), схематично;
фиг.5 - приводное средство во втором, противоположном движению тягового органа с компенсационными колесами во втором положении вращения (β12=45°; β22=45°) и коромыслом также во втором положении (поворот на угол δ относительно положения на фиг.2 и 3), схематично;
фиг.6 - цепной привод, в частности привод с транспортной цепью, схематично.
На чертежах используются следующие ссылочные позиции:
G - шарнирная цепь
R - звездочка
K - звено цепи
Р - центр вращения
S - перпендикуляр
А - точка отделения
D - ось вращения
Heff - эффективное плечо рычага
Heff' - эффективное плечо рычага
1 - первое колесо тягового органа
2 - второе колесо тягового органа
3 - тяговый орган
4 - первое компенсационное колесо
5 - второе компенсационное колесо
6 - коромысло
7 - звездочка
8 - цапфа
31 - верхняя ветвь
32 - нижняя ветвь
41 - первый участок рабочей поверхности
42 - второй участок рабочей поверхности
43 - третий участок рабочей поверхности
44 - четвертый участок рабочей поверхности
45 - опора (ось вращения)
61 - первое плечо рычага
62 - второе плечо рычага
63 - участок коромысла
64 - отверстие
65 - паз
66 - упор
67 - отверстие
68 - геометрическая ось «центр шестерни двигателя» (первое колесо 1 тягового органа) - «центр колеса роликовой цепи на валу колеса транспортной цепи» (второе колесо 2 тягового органа)
69 - геометрическая средняя ось
φ - угол захода
υ - угол обвива
τ - угол шага
r1n - эффективный радиус (расстояние) первого компенсационного колеса между осью вращения и рабочей поверхностью
rn2 - эффективный радиус (расстояние) второго компенсационного колеса между осью вращения и рабочей поверхностью
αn - угловые отношения коромысла
β1n - угол вращения первого компенсационного колеса
β2n - угол вращения второго компенсационного колеса
λ - угол проворачивания компенсационных колес для согласования с направлением вращения
δ - угол поворота коромысла
Предложенное приводное средство содержит первое 1 и второе 2 колеса тягового органа, тяговый орган 3, первое 4 и второе 5 компенсационные колеса и коромысло 6.
Цепной привод содержит, по меньшей мере, одно приводное средство и, по меньшей мере, одну звездочку 7, приводимую в действие приводным средством. В частности, цепной привод содержит транспортную цепь, преимущественно цепь ступеней или цепь платформ, на которой размещено определенное число эскалаторных ступеней или платформ, а также дополнительную, как правило, неприводимую звездочку (не показана), причем транспортная цепь движется по звездочке 7 и дополнительной звездочке.
Тяговый орган 3, например цепь, преимущественно роликовая цепь, по типу бесконечной цепи огибает его первое 1 и второе 2 колеса. Образуются первый, не прилегающий к колесам 1, 2 участок тягового органа 3, называемый в соответствии со своим обычным положением верхней ветвью 31, и второй, также не прилегающий к колесам 1, 2 участок тягового органа 3, называемый в соответствии со своим обычным положением нижней ветвью 32. Преимущественно колесо 1 приводится во вращение двигателем (не показан). В соответствии с возникающим передаточным отношением колесо 2 приводится во вращение движущимся тяговым органом 3 и, в свою очередь, приводит во вращение звездочку 7. Последняя может быть, например, частью цепного привода, в частности транспортной цепи, на которой установлены отдельные ступени или платформы. В качестве эскалаторов рассматриваются, в частности, эскалаторы со ступенями, находящие применение, например, в универмагах, а также траволаторы с платформами, находящие применение, например, в аэропортах.
Компенсационные колеса 4, 5 имеют отличающуюся от круговой формы некруглую форму и снабжены опорой 45 для вращательного соединения с коромыслом 6. Опора 45 образует ось вращения компенсационных колес 4, 5. Компенсационные колеса, предпочтительно, имеют рабочую поверхность с четырьмя участками 41, 42, 43, 44, которые выполнены преимущественно выпуклыми. Один участок выполнен, в основном, кругообразным, однако не имеет общего с остальными участками центра окружности. Следует отметить, что некруглая форма компенсационных колес 4, 5 для иллюстративных целей изображена в сильно преувеличенном виде. В действительности же некруглая форма компенсационных колес является намного менее выраженной, чем это показано. Функционально компенсационные колеса 4, 5 предназначены для создания рабочей поверхности для тягового органа 3. Эффективный радиус г между осью 45 вращения соответствующего компенсационного колеса 4, 5 и прилегающим тяговым органом 3 является функцией углового положения β компенсационного колеса 4, 5. Для иллюстративных целей на фиг.2-5 обозначены два эффективных радиуса r11, r12компенсационного колеса 4 и два эффективных радиуса r21, r22 компенсационного колеса 5. Кроме того, показаны примерные угловые положения β11, β12 компенсационного колеса 4 и примерные угловые положения β21, β22 компенсационного колеса 5. На фиг.2 и 3 возникает следующая примерная взаимосвязь:
- первое компенсационное колесо:
β11=0°
β12=45°
…
β1n=360°
r11 при r11>r12
r12 при r12
…
r1n при r1n
- второе компенсационное колесо:
β21=00
β22=45°
…
β2n=360°
r21 при r21
r22 при r22>r23
…
r2n при r2n
Из вышеописанного и чертежей видно, что речь идет, в основном, о том, чтобы предусмотреть компенсационные колеса 4, 5, которые в зависимости от углового положения β имеют рабочую поверхность с разными радиусами (расстояниями) r до центра вращения. В этом отношении изображенная здесь форма является лишь примером. Возможны также другие формы компенсационных колес, например, также эвольвентные формы.
Следует учесть, что компенсационные колеса, в частности их рабочие поверхности, описаны здесь лишь в общих чертах. Преимущественно компенсационные колеса представляют собой колеса, которые должны вступать в геометрическое замыкание с тяговым органом. Преимущественно здесь рассматриваются зубчатые колеса, так что рабочая поверхность, в основном, совпадает с диаметром делительной окружности зубчатого колеса. Соответственно выполненные в виде зубчатого колеса компенсационные колеса 4, 5 имеют разные диаметры делительной окружности.
Коромысло 6 имеет, в основном, Y-образную форму. Следовательно, оно имеет первое 61 и второе 62 плечи рычага, а также участок 63. Плечи 61, 62 ориентированы по отношению друг к другу под тупым углом α1. Между плечом 61 и участком 63 и между плечом 62 и участком 63 предусмотрен сверхтупой угол α2 и α3 соответственно. Между плечами 61, 62 и преимущественно в точке пересечения их продольных осей выполнено отверстие 67 для вращательного размещения коромысла 6 на неподвижной цапфе 8. Цапфа 8 и отверстие 67 образуют опору, которая позволяет коромыслу поворачиваться вокруг оси поворота, проходящей вдоль цапфы 8. Кроме того, цапфа 8 позиционирована преимущественно на геометрической оси «центр шестерни двигателя» (первое колесо 1 тягового органа) - «центр колеса роликовой цепи на валу колеса транспортной цепи» (второе колесо 2 тягового органа). Названная геометрическая ось обозначена поз. 68. Далее оба плеча 61, 62 снабжены на своих свободных концах опорными средствами, например цапфами, для вращательного размещения компенсационных колес 4, 5. Отверстие 45 в них является частью опорного средства. Участок 63 снабжен отверстием 64. За счет него коромысло 6 предназначено, в принципе, для надевания на цапфу 8 в альтернативном положении. Следовательно, отверстие 64 и цапфа 8 образуют альтернативную опору. В принципе, возможны дополнительные отверстия в коромысле 6 и, следовательно, также другие альтернативные положения коромысла 6. Такая мера позволяет создать различные точки опоры, которые приводят, в частности, к различным геометрическим отношениям между осью поворота, точками размещения (оси 45 вращения) компенсационных колес 4, 5 и колесами 1, 2. В частности, за счет положения опоры по отношению к осям 45 вращения компенсационных колес 4, 5 можно установить нужный угол λ проворачивания последних. Благодаря этому при повороте коромысла 6 на угол δ компенсационные колеса 4, 5 могут проворачиваться на угол λ. Определение положения опоры коромысла происходит, в основном, итеративно. В качестве заданной величины известен желаемый угол λ проворачивания компенсационных колес 4, 5. Этот желаемый угол λ проворачивания можно установить различным образом. При заданном выполнении коромысла 6 и также заданном угле δ его поворота угол λ проворачивания можно установить, например, за счет изменения положения опоры коромысла 6. Однако для установления нужного угла λ проворачивания можно изменить также другие параметры, например форму и/или размеры коромысла 6 и/или угол δ поворота и/или углы α1, α2, α3 и/или расстояние между цапфой 8 и соответствующим центром компенсационных колес 4, 5 и т.д. Однако оказалось, что позиционирование опоры коромысла 6 представляет собой простейшую возможность установления нужного угла λ проворачивания. Выполнение в коромысле 6 определенного числа отверстий 64, 67 дает особенно простую возможность изменения положения ее опоры за счет переставления. Точная настройка может осуществляться затем за счет позиционирования цапфы 8.
Следует отметить, что отверстия 64, 67 или их центры расположены на одной средней оси 69. Последняя представляет собой линию, на которой предпочтительно могут быть расположены другие отверстия для размещения коромысла 6 на цапфе 8. Далее следует отметить, что возможно также, например, V-образная, Т-образная или прямая форма коромысла. Важно, чтобы с поворотом коромысла 6 можно было достичь нужного угла λ проворачивания компенсационных колес.
Коромысло 6 снабжено устройством ограничения угла поворота. Оно включает в себя, в основном, и преимущественно паз 65 в коромысле 6 и неподвижный упор 66.
Принцип действия приводного средства и цепного привода следующий.
В первом направлении вращения колес 1, 2 и результирующем направлении движения тягового органа 3 его колеса 1, 2 и компенсационные колеса 4, 5 проворачиваются, и тяговый орган 3 движется по стрелкам на фиг.2, 3. В этом случае направления движения верхняя ветвь 31 тягового органа 3 является тяговой, т.е. ведущей ветвью, а нижняя ветвь 32 - тянутой, т.е. холостой ветвью.
Компенсационные колеса 4, 5 воздействуют непосредственно на соответственно прилегающий участок тягового органа 3. В случае компенсационного колеса 4 это верхняя ветвь 31, а в случае компенсационного колеса 5 - нижняя ветвь 32. Воздействие происходит в виде перемещения данного участка тягового органа в зависимости от углового положения β компенсационного колеса 4, 5.
Для иллюстративных целей на фиг.2 и 3 изображены два различных угловых положения β компенсационных колес 4, 5. Из обзора фиг.2, 3 видно, что компенсационное колесо 4 при вращении с β=0° на 45° переместило прилегающий к участку рабочей поверхности участок верхней ветви 31 на разность между радиусами r11 и r12. Расстояние между осью 45 вращения компенсационного колеса 5 и прилегающей к рабочей поверхности нижней ветвью 32 также изменилось с r21 на r22.
Попеременное смещение верхней 31 и нижней 32 ветвей упомянутым образом вызывает то, что натяжение верхней ветви 31 попеременно связано с ослаблением нижней ветви 32, а ослабление верхней ветви 31 - с натяжением нижней ветви 32. Следовательно, коромысло 6 и компенсационные колеса 4, 5 образуют натяжное средство для тягового органа 3. За счет формы рабочих поверхностей компенсационных колес 4, 5 возникают, разумеется, промежуточные расстояния r(β), которые зависят от геометрии данного компенсационного колеса 4, 5. В принципе, однако, происходят чередующиеся натяжение и ослабление верхней 31 и нижней 32 ветвей, как только приводное средство будет приведено в действие.
За счет использования компенсационных колес 4, 5 возникает следующий эффект. Если исходить из того, что если колесо 1 приводится во вращение с постоянной угловой скоростью (скоростью вращения), то колесо 2 вращается с непостоянной угловой скоростью. Этот эффект объясняется тем, что верхняя ветвь 31 за счет натяжения удлиняется, а нижняя ветвь 32 за счет ослабления укорачивается или верхняя ветвь 31 за счет ослабления укорачивается, а нижняя ветвь 32 за счет натяжения удлиняется. Угловая скорость колеса 2, нанесенная в зависимости от времени, соответствует в самом широком смысле функции конуса с постоянным чередованием максимальной и минимальной угловых скоростей. Приводимое во вращение, таким образом, колесо 2 позволяет, в свою очередь, приводить во вращение звездочку 7 цепного привода, в частности эскалатора, таким образом, что эскалатор/траволатор, в частности его ступени или платформы соответственно, движется с постоянной или приблизительно постоянной скоростью. Если скорость приводимой в движение роликовой цепи определяется более коротким эффективным плечом Heff' рычага, то скорость вращения колеса 2 возрастает, а если более длинным эффективным плечом Heff рычага, то она уменьшается. Эта мера препятствует возникновению эффекта многоугольника, и роликовая цепь движется в результате с приблизительно постоянной скоростью.
Для компенсации эффекта многоугольника требуется, в принципе, согласование приводного средства со звездочкой или цепным приводом таким образом, чтобы изменение скорости вращения колеса 2 согласовывалось с изменением плеча рычага звездочки 7. Необходимые для этого меры известны специалисту. Согласование осуществляется, однако, в принципе, для направления вращения звездочки 7 или предвключенных компонентов приводного средства. При реверсировании направления вращения компенсации эффекта многоугольника в известных из уровня техники цепных приводах не происходит. Напротив, может наступить такой случай, что эффект многоугольника усилится, а роликовая цепь будет двигаться с заметными колебаниями скорости.
В предложенном цепном приводе, в частности в приводном средстве, если эффективный радиус r1n компенсационного колеса 4 в верхней ветви 31 максимальный, то эффективный радиус r2n в нижней ветви 32 минимальный и наоборот. Несмотря на это обстоятельство, имеет место симметричная компенсационная характеристика. Следовательно, при реверсировании направления вращения приводного двигателя или при смене крутящего момента ведущая и холостая ветви меняются местами, а компенсационное действие, тем не менее, снова «работает правильно».
Это достигается за счет проворачивания компенсационных колес 4, 5 на определенный угол, в частности на угол λ. При реверсировании направления вращения коромысло 6 поворачивается на угол δ. Будучи обусловлены геометрическим замыканием между компенсационными колесами 4, 5 и тяговым органом 3 (преимущественно роликовой цепью), они проворачиваются на определенный угол λ. Это проворачивание компенсационных колес 4, 5 крайне предпочтительно, поскольку за счет этого изменяются эффективные радиусы r1n и r2n и возникает компенсационное действие, необходимое для нового направления вращения. К тому же возникает то преимущество, что натяжение холостой ветви становится почти идеально равномерным. За счет закрепления компенсационных колес 4, 5 на общем коромысле 6, которое, в свою очередь, установлено на цапфе 8, возникает крайне простое, самопроизвольно выравнивающееся, прочное и недорогое приводное средство или цепной привод, которое/который, кроме того, дает еще то преимущество, что тяговый орган 3, в частности цепь, в любой момент времени или в любом угловом положении его колес 1, 2 натяжен равномерно или почти равномерно. Для закрепления приводное средство требует только одной точки, в которой цапфа 8 закреплена для установки коромысла 6. Кроме того, это приводное средство требует мало конструктивного пространства, т.е. имеет крайне компактную конструкцию.
Угол λ проворачивания компенсационных колес 4, 5 и размещение коромысла 6 могут быть определены, в частности, с помощью следующих расчетов.
Требуемый угол λ проворачивания компенсационных колес 4, 5 вычисляется следующим образом. Определяется половина угла шага звездочки 7 транспортной цепи и умножается на число зубьев колеса 2 на валу звездочки 7, деленное на число зубьев компенсационных колес 4, 5. Это значение является углом λ, на который при смене направления вращения или крутящего момента должны проворачиваться компенсационные колеса 4, 5. Каждое из них проворачивается практически на значение λ.
В данном примере угол λ проворачивания составляет около 45°, что, в свою очередь, соответствует углу между β11 и β12 или β21 и β22, который, в свою очередь, возникает из угла между соседними r11 и r12 или r21 и r22, т.е. углу между максимальным и минимальным радиусами некруглого компенсационного колеса.
Для достижения именно этих углов λ проворачивания положение цапфы 8, на которой поворачивается коромысло 6, позиционируется на его средней оси 69 так, что при смене направления вращения для компенсационных колес 4, 5 возникает соответствующий угол λ проворачивания. В каком месте на оси точка должна лежать оптимально, специалист определяет графическим или расчетным путем.
Для иллюстративных целей на фиг.4 и 5 приводное средство для цепного привода показано с реверсированным по сравнению с фиг.2 и 3 направлением вращения. По сравнению с состоянием на фиг.2 и 3 коромысло 6 повернуто на угол δ. Из этого возникает угол λ проворачивания компенсационных колес 4, 5, необходимый для поддержания компенсации эффекта многоугольника при реверсированном направлении вращения. Компенсационное колесо 4 воздействует на холостую ветвь приводного средства, образованную верхней ветвью 31. Компенсационное колесо 5 воздействует на ведущую ветвь, образованную нижней ветвью 32. В остальном можно сослаться на пояснения к фиг.2 и 3. Противоходные натяжение и ослабление верхней 31 и нижней 32 ветвей происходят, в принципе, описанным выше образом.
Чтобы обеспечить функцию коромысла 6 при смене направления вращения, т.е. натяжение приводной цепи, могут быть предусмотрены, при необходимости, известные из уровня техники натяжные элементы.
Изобретение описано, в частности, в виде цепного привода, содержащего приводимую во вращение звездочку, приводное средство для привода звездочки с компенсацией эффекта многоугольника, причем приводное средство содержит два колеса 1, 2, движущийся по ним тяговый орган 3 и подвижные натяжные средства и характеризуется, в частности, тем, что натяжные средства в зависимости от направления вращения тягового органа могут изменять эффективную длину ведущей ветви за счет воздействия на нее или могут изменять эффективную длину холостой ветви за счет воздействия на нее.
Кроме того, изобретение характеризуется, в частности, тем, что натяжные средства содержат поворотное коромысло 6, некруглые компенсационные колеса 4, 5, размещенные на нем, а также тем, что компенсационное колесо 4 может входить в зацепление с ведущей ветвью тягового органа, а компенсационное колесо 5 - с холостой ветвью.
Реферат
Изобретение относится к приводному средству для привода звездочек и цепному приводу. Приводное средство для привода звездочки с компенсацией эффекта многоугольника содержит два колеса (1, 2), тяговый орган (3) с верхней ветвью (31) и нижней ветвью (32) и натяжное средство. Натяжное средство содержит первое некруглое компенсационное колесо (4) для контакта с верхней ветвью (31), второе некруглое компенсационное колесо (4) для контакта с нижней ветвью (32) и коромысло (6) для установки на нем с возможностью вращения первого и второго компенсационных колес (4, 5). Коромысло (6) установлено с возможностью поворота на неподвижной опоре. Изобретение относится также к цепному приводу, содержащему приводное средство и, по меньшей мере, одну звездочку (7), приводимую во вращение приводным средством. Изобретение позволяет посредством предложенного приводного средства компенсировать эффект многоугольника как в прямом, так и в противоположном направлениях вращения. 2 н. и 18 з.п. ф-лы, 6 ил.
Комментарии